Sia f : [a, b] → R una")
L’integrale di Riemann (integrale definito)
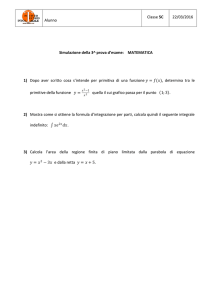
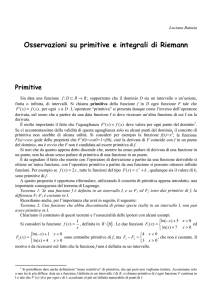
Sia f : [a, b] → R una funzione continua e non negativa. Vogliamo determinare l’area
dell’insieme H compreso tra l’asse x, le rette x = a e x = b e il grafico di f :
4
y
3
2
1
0
0
0.5
1.5
1
2
2.5
3
x
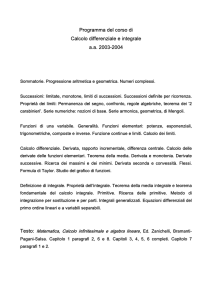
Un modo per affrontare il problema è quello di approssimare H con un’unione di
rettangoli. Dividiamo l’intervallo [a, b] in n intervalli I1 , I2 , . . . , In definiti da;
a = x0 < x1 < x2 < . . . < xn = b,
Ik = [xk−1 , xk ].
Poniamo
mk = min{f (x)|x ∈ Ik },
Mk = max{f (x)|x ∈ Ik };
mk e Mk esistono per il Teorema di Weierstrass.
Ogni rettangolo Ik × [0, mk ] è contenuto in H:
An˚Approximation ˚of ˚the ˚Integral ˚of
f(x) ˚= ˚x*(x-2)*(x-3)+2
on˚the ˚Interval ˚[0,˚3]
Using ˚a˚Lower ˚Riemann ˚Sum
Approximate ˚Value: ˚8.250000000
4
3
2
1
0
0
0.5
1
1.5
2
2.5
3
x
-1
Area: 7.414460907
f(x)
Essendo l’area di ogni rettangolo uguale a
mk (xk − xk−1 ),
1
possiamo scrivere
A(H) ≥
n
X
k=1
mk (xk − xk−1 ).
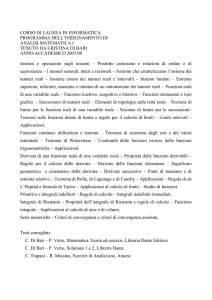
D’altra parte, l’unione dei rettangoli Ik × [0, Mk ] contiene H:
An˚Approximation ˚of ˚the ˚Integral ˚of
f(x) ˚= ˚x*(x-2)*(x-3)+2
on˚the ˚Interval ˚[0,˚3]
Using ˚an˚Upper ˚Riemann ˚Sum
Approximate ˚Value: ˚8.250000000
4
3
2
1
0
0
0.5
1
1.5
2
2.5
3
x
-1
Area: 9.034083537
f(x)
Ogni tale rettangolo ha area
Mk (xk − xk−1 ),
quindi possiamo scrivere
A(H) ≤
Poniamo
k=1
Mk (xk − xk−1 ).
n
X
k=1
mk (xk − xk−1 )|{x0 , . . . , xn } part. di [a, b]},
n
X
Mk (xk − xk−1 )|{x0 , . . . , xn } part. di [a, b]}.
a(f ) = sup{
A(f ) = inf{
n
X
k=1
Teorema Sia f : [a, b] → R una funzione continua e sia f (x) ≥ 0 ∀x ∈ [a, b]. Allora
a(f ) = A(f ).
2
Definizione Se a(f ) = A(f ), tale numero si indica con
Z b
a(f ) = A(f ) =
f (x)dx,
a
e si chiama integrale di Riemann di f in [a, b], oppure integrale definito di f in
[a, b].
Lemma Sia f : [a, b] → R una funzione continua e sia f (x) ≥ 0 ∀x ∈ [a, b]. Allora
Z b
f (x)dx ≤ (b − a) max f,
(b − a) min f ≤
a
dove min f = min{f (x)|x ∈ [a, b]}, max f = max{f (x)|x ∈ [a, b]}.
Dimostrazione Per ogni partizione di [a, b], il rettangolo
[a, b] × [0, min f ] ⊆
n
[
k=0
Ik × [0, mk ],
n
[
Ik × [0, Mk ].
e analogamente, il rettangolo
[a, b] × [0, max f ] ⊇
k=0
Osservazione Nella definizione di integrale di Riemann non è necessaria nè la positività
di f , nè la continuità di f ; è sufficiente che si abbia a(f ) = A(f ); quando cioò accade, f si
dice integrabile in [a, b]. In generale vale il seguente
Teorema Se f è continua su [a, b],
oppure se f è continua su [a, b]\{c1, c2 , . . . cs } (cioè è continua su [a, b] tranne in un
numero finito di punti) ed f è li mitata su [a, b],
allora f è integrabile in [a, b].
Rd
Osservazione Se f è negativa su un intervallo [c, d], l’integrale di Riemann c f (x)dx
fornisce l’area compresa tral’asse delle x e il grafico di f con il segno opposto, e quindi in
questo caso l’area di H è uguale a
Z d
−
f (x)dx.
c
3
Proprietà dell’ integrale di Riemann
Rb
Rb
Rb
g(x) dx;
f
(x)
dx
+
f
(x)
+
g(x)
dx
=
a
a
a
Rb
Rb
• a αf (x) dx = α a f (x) dx ∀α ∈ R;
Rb
Rc
Rb
• a f (x) dx = a f (x) dx + c f (x) dx ∀c ∈ (a, b).
•
Definizione Sia b < a e sia f integrabile in [b, a]. Allora poniamo
Z
b
f (x) dx := −
a
Z
a
f (x) dx.
b
Lemma La relazione
Z
b
f (x) dx =
a
Z
c
f (x) dx +
a
Z
b
f (x) dx
c
vale per ogni terna di numeri (non necessariamente distinti) a, b, c appartenenti a un intervallo su cui f è integrabile.
In particolare si ha:
Z
a
Z
f (x) dx =
a
b
f (x) dx +
a
=
Z
a
f (x) dx =
b
b
a
Z
f (x) dx −
Z
b
f (x) dx = 0.
a
Le funzioni primitive
ed il Teorema fondamentale del calcolo integrale
Definizione Una funzione derivabile
F : (a, b) → R
si dice primitiva o antiderivata di una funzione f : (a, b) → R se
F ′ (x) = f (x)
∀x ∈ (a, b).
4
Esempio La funzione
F (x) =
1 3
x
3
è una primitiva della funzione f (x) = x2 ; infatti
F ′ (x) =
1 2
3x = x2 = f (x).
3
Osserviamo che anche la funzione
G(x) =
1 3
x + 29
3
è una primitiva della funzione f (x) = x2 ; infatti
G′ (x) =
1 2
3x + (29)′ = x2 = f (x).
3
In generale, ogni funzione del tipo 13 x3 + c con c ∈ R è una primitiva di x2 .
Teorema (Caratterizzazione delle funzioni primitive)
Sia f : (a, b) → R una funzione, e sia F : (a, b) → R una primitiva di f .
Allora tutte le primitive di f in (a, b) sono del tipo
F (x) + c,
con c ∈ R.
Dimostrazione Sia G(x) un’altra primitiva di f (x), e consideriamo la funzione
H(x) = G(x) − F (x).
La funzione H : (a, b) → R è derivabile in (a, b), e si ha
H ′ (x) = G′ (x) − F ′ (x) = f (x) − f (x) = 0
per ogni x ∈ (a, b). Per la caratterizzazione delle funzioni costanti si ha
H(x) = c
per c ∈ R opportuno, quindi
G(x) − F (x) = c,
G(x) = F (x) + c.
5
Definizione Sia f : (a, b) → R una funzione; l’insieme di tutte le funzioni primitive di f
si dice integrale indefinito di f e si indica
Z
f (x) dx = {F (x) | F ′ (x) = f (x)}.
Si osservi che se f non ammette primitive, allora
Z
f (x) dx = ∅;
se, invece, f (x) ammette almeno una primitiva F (x), allora
Z
f (x) dx = {F (x) + c | c ∈ R},
e spesso si usa la notazione
Z
f (x) dx = F (x) + c.
Teorema del valore medio per gli integrali
Se f è una funzione continua in [a, b], allora esiste un punto c ∈ (a, b) tale che
1
f (c) =
(b − a)
Z
b
f (x) dx.
a
Dimostrazione Essendo f continua su [a, b], f assume su tale intervallo un valore minimo
m e un valore massimo M in due punti che indichiamo, rispettivamente, con
x = xm ,
x = xM .
Quindi si ha
m = f (xm ) ≤ f (x) ≤ f (xM ) = M,
∀x ∈ [a, b].
Abbiamo visto che valgono le diseguaglianze
m(b − a) ≤
Z
b
a
f (x) dx ≤ M (b − a),
ed esse implicano
1
f (xm ) = m ≤
(b − a)
Z
b
a
6
f (x) dx ≤ M = f (xM ).
Per il Teorema dei valori intermedi, f assume ogni valore compreso tra f (xm ) e f (xM ) in
qualche punto compreso tra xm e xM .
Quindi esiste c compreso tra xm e xM tale che
1
f (c) =
(b − a)
Z
b
f (x) dx,
a
Rb
cioè a f (x) è uguale a f (c)(b − a), che è l’area di un rettangolo con base di larghezza
(b − a) ed altezza f (c).
Definizione Se f è integrabile in [a, b], allora il valore medio o la media di f in [a, b],
indicata con f , è definito da:
1
f :=
b−a
Z
b
f (x) dx.
a
Esempio Il valore medio di f (x) = 2x nell’intervallo [1, 3] è
1
3−1
dove
R3
1
Z
3
2x dx =
1
16+2
2 = 4,
2 2
2x dx è stato calcolato usando la formula per l’area dio un trapezio.
8
y6
4
2
0
0
1
2
3
4
x
Teorema fondamentale del calcolo integrale
7
i. Sia f : [a, b] → R una funzione continua su [a, b]. Allora la funzione
Z x
F (x) :=
f (t) dt, F : [a, b] → R
a
è una funzione primitiva di f in (a, b).
ii. Sia G : [a, b] → R una funzione primitiva arbitraria di f . Allora
Z b
f (x) dx = G(b) − G(a).
a
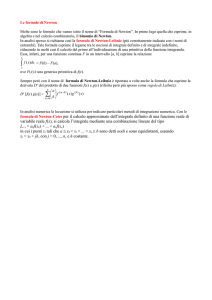
Osservazione Se f (x) ≥ 0 su (a, b), la funzione F assegna ad ogni x0 ∈ [a, b] l’area della
regione compresa tra l’asse x, le rette x = a e x = x0 e il grafico di f :
4
y
3
2
1
0
0
0.5
1
1.5
2
2.5
3
x
Dimostrazione i. Dobbiamo dimostrare che
F ′ (x0 ) = f (x0 ),
∀x0 ∈ (a, b).
Si ha:
F (x) − F (x0 )
=
x→x0
x − x0
Rx
Rx
f (t) dt − a 0 f (t) dt
a
= lim
=
x→x0
x − x0
Z
Z a
1 x
f (t) dt +
f (t) dt =
= lim
x→x0 x − x0
a
x0
Z x
1
f (t) dt =
= lim
x→x0 x − x0 x
0
F ′ (x0 ) = lim
(per il Lemma)
(per il Teo. valor medio)
= lim f (c(x)) =
x→x0
( lim c(x) = x0 , f cont.) = f (x0 ).
x→x0
8
Rx
ii. Essendo F (x) = a f (t) dt una primitiva di f (x), per il Teorema di caratterizzazione
delle funzioni primitive, ogni altra primitiva di f è del tipo
G(x) =
Osserviamo che
G(a) =
Z
Z
x
f (t) dt + c.
a
a
f (t) dt + c = 0 + c = c.
a
Segue che
Z
x
x
G(x) − G(a) =
Z
b
G(b) − G(a) =
Z
G(x) =
f (t) dt + G(a),
a
Esempio Vogliamo calcolare
Z
f (t) dt,
a
f (t) dt.
a
π
sin(x) dx.
0
Osserviamo che una primitiva della funzione sin x è data da − cos x; infatti
(− cos x)′ = −(− sin x) = sin x.
Quindi
Z
π
sin(x) dx = − cos(π) − (− cos(0)) =
0
= −(−1) − (−1) = 1 + 1 = 2.
1
y 0.5
0
0
1
2
3
4
5
6
x
-0.5
-1
9
Esempio Calcoliamo
Z
1
x3 dx.
−1
Una primitiva è data da
x4
;
4
infatti:
x4 ′ 1
= (4x3 ) = x3 .
4
4
Quindi
Z
1
14
(−1)4
1 1
x dx =
−
= − = 0.
4
4
4 4
−1
3
Osserviamo che per calcolare l’area A della regione
1.5
y
1
0.5
0
-1
0
-0.5
0.5
1
x
-0.5
-1
-1.5
dobbiamo distinguere il caso in cui
f ≥ 0 (e ciò vale per 0 ≤ x ≤ 1) e quello in cui
f ≤ 0 (per −1 ≤ x ≤ 0);
R1
nel primo caso l’area della regione è uguale a 0 x3 dx;
R0
nel secondo caso l’area è data da − −1 x3 dx.
Si ha quindi
A=−
Z
0
3
x dx +
Z
1
x3 dx =
0
−1
(0)4 (−1)4 14
1 1
(0)4 1
=−
+
=0+ + −0 = .
−
−
4
4
4
4
4 4
2
10
Esempio Calcoliamo di nuovo il valore medio di f (x) = 2x nell’intervallo [1, 3] usando il
Teorema fondamentale del calcolo integrale: una primitiva di 2x è x2 ; quindi
1
3−1
Z
3
2x dx =
1
1 2
1
3 − 12 ) = 8 = 4.
2
2
8
y6
4
2
0
0
1
2
4
3
x
Primitive di funzioni elementari
1
xα+1 + c,
α+1
•
Z
xα dx =
•
Z
1
dx = ln |x| + c
x
•
Z
ex dx = ex + c
•
Z
sin x dx = − cos x + c
•
Z
cos x dx = sin x + c
1
dx = tgx + c
cos2 x
Z
1
dx = −cotgx + c
•
2
sin
x
Z
1
dx = arctgx + c
•
1 + x2
Z
1
dx = arcsin x + c
• √
1 − x2
•
Z
11
α 6= −1
Metodi di integrazione
Integrazione per sostituzione
Il metodo di sostituzione è conseguenza della regola per la derivata di una funzione composta:
′
f (g(x)) = f ′ (g(x)) g ′ (x)
Z
⇒ f ′ (g(x)) g ′ (x) dx = f (g(x)) + c.
(IS)
Il seguente formalismo può aiutare ad applicare tale metodo:
poniamo u = g(x) e du = g ′ (x)dx. Allora (IS) si riscrive:
Z
Z
′
′
f (g(x)) g (x) dx = f ′ (u) du = f (u) + c = f (g(x)) + c.
Esempi
R
• x2x+1 dx:
poniamo u = x2 + 1, e du = (x2 + 1)′ dx = 2x dx, quindi x dx =
Z
Z
1
x
dx =
du =
2
x +1
2u
Z
1
1
=
du =
2
u
1
= ln |u| + c =
2
1
= ln |x2 + 1| + c =
2
1
= ln(x2 + 1) + c.
2
•
R
sin(3 ln x)
x
1
2
du e si ha:
dx:
poniamo u = 3 ln x, e du = (3 ln x)′ dx = x3 dx, quindi x1 dx = 13 du e si ha:
Z
Z
sin(3 ln x)
sin u
dx =
du =
x
3
Z
1
=
sin u du =
3
1
= − cos u + c =
3
1
= − cos(3 ln x) + c.
3
12
Integrazione per parti
Il metodo di integrazione per parti è conseguenza della regola per la derivata di
un prodotto di funzioni:
⇒
Z f (x)g(x)
′
= f ′ (x)g(x) + f (x)g ′ (x)
Z ′
f (x)g(x) + f (x)g (x) dx =
f (x)g(x) dx
⇒
Z
⇒
Z
′
′
′
f (x)g(x) dx +
Z
f (x)g ′ (x) dx = f (x)g(x)
′
f (x)g (x) dx = f (x)g(x) −
Z
f ′ (x)g(x) dx.
Esempi
R
• xex dx; abbiamo
f (x) =x
g ′ (x) =ex
f ′ (x) =1
g(x) =ex
Z
Z
x
x
xe dx = xe − ex dx = xex − ex + c.
R
• ln x dx; abbiamo
f (x) = ln x
g ′ (x) =1
1
f ′ (x) =
x
g(x) =x
Z
ln x dx = x ln x −
Z
1
x dx = x ln x −
x
13
Z
1 dx = x ln x − x + c.
(IP )
R
• x2 sin x dx; abbiamo
f (x) =x2
g ′ (x) = sin x
f ′ (x) =2x
g(x) = − cos x
Z
Z
2
2
x sin x dx = −x cos x − 2x(− cos x) dx
Z
2
= −x cos x + 2 x cos x dx,
e integriamo di nuovo per parti:
f (x) =x
g ′ (x) = cos x
f ′ (x) =1
g(x) = sin x
2
−x cos x + 2
Z
2
x cos xdx = −x cos x + 2 x sin x −
Z
sin xdx
= −x2 cos x + 2x sin x + 2 cos x + c.
R
• sin2 x dx
f (x) = sin x
g ′ (x) = sin x
f ′ (x) = cos x
Z
g(x) = − cos x
Z
2
sin x dx = − sin x cos x − − cos2 x dx =
= − sin x cos x +
= − sin x cos x +
Z
Z
(1 − sin2 x) dx =
1 dx −
Z
= − sin x cos x + x + c −
⇒2
⇒
Z
Z
sin2 x dx =
Z
sin2 x
sin2 x = − sin x cos x + x + c
sin2 x =
1
− sin x cos x + x + c
2
14
 Sia f : [a, b] → R una")