CALCOLO INTEGRALE
ANTONIO IANNIZZOTTO
Sommario. Integrale di Riemann: definizione, proprietà e significato geometrico, teorema della
media. Primitive di una funzione. Tecniche di integrazione indefinita: per decomposizione, per
parti, per sostituzione, per frazioni semplici. Teorema fondamentale del calcolo integrale. Calcolo
dell’area di un dominio piano. Integrali generalizzati: criteri di convergenza. Queste note sono un
mero supporto didattico, senza alcuna pretesa di completezza, originalità o precisione.
Indice
1. L’integrale di Riemann
2. Integrazione indefinita
3. Il teorema fondamentale
4. Integrali generalizzati
Riferimenti bibliografici
1
9
20
25
32
Versione del 30 novembre 2016
1. L’integrale di Riemann
Un viaggio di mille miglia comincia con un passo.
Lao Tze
Il calcolo integrale è un metodo di risoluzione per diversi problemi, la cui idea fondamentale è
quella di ’sommare’ un certo numero di contributi parziali, e poi passare al limite quando il numero
di contributi tende a ∞ e il singolo contributo tende a 0. Quest’ultima caratteristica differenzia il
calcolo integrale da quello delle serie, visto in [3], in cui si sommano contributi sempre più piccoli
(i termini della serie), che però una volta sommati non vengono alterati.
Qui esponiamo la teoria dell’integrazione secondo Riemann (che non è l’unica), con particolare
attenzione ai suoi aspetti geometrici: questi sono legati al calcolo dell’area di figure piane con
contorno curvilineo, quindi premettiamo alcune nozioni di teoria della misura (secondo PeanoJordan) al fine di rendere rigorosa l’idea di ’area’.
Costruiamo per gradi la famiglia M dei sottoinsiemi di R2 misurabili1 e la loro misura, definita
come una funzione | · | : M → [0, +∞]. Come primo passo poniamo ∅ ∈ M, |∅| = 0. Consideriamo
poi i rettangoli chiusi R = [a, b] × [c, d] (a, b, c, d ∈ R, a 6 b, c 6 d), ponendo R ∈ M e
|R| = (b − a) · (d − c),
1Usiamo la notazione A2 = A × A.
1
2
A. IANNIZZOTTO
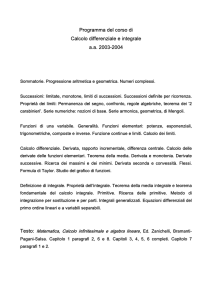
Figura 1. Due rappresentazioni equivalenti di un plurirettangolo.
Figura 2. Approssimazioni
interna ed esterna.
in particolare la misura dei punti e dei segmenti orizzontali o verticali è 0 (definizioni analoghe
vengono date per i rettangoli aperti o semi-aperti). Un pluri-rettangolo è un insieme del tipo
P =
n
[
Ri
(R1 , . . . Rn ⊂ R2 rettangoli, Ri ∩ Rj = ∅ per ogni i 6= j).
i=1
Per esso poniamo P ∈ M e
|P | =
n
X
|Ri |.
i=1
Notiamo che la rappresentazione di P mediante rettangoli disgiunti non è unica, ma il valore di |P |
sı̀ (fig. 1). Se P, Q ∈ M sono pluri-rettangoli t.c. P ⊆ Q, allora si ha |P | 6 |Q|. Sia ora A ⊂ R2
un insieme limitato. Introduciamo gli insiemi
σ = {|P | : P pluri-rettangolo, P ⊆ A}, Σ = {|Q| : Q pluri-rettangolo, A ⊆ Q}
(fig. 2). Ovviamente si ha s 6 S per ogni s ∈ σ, S ∈ Σ, in particolare (ved. [2])
sup σ 6 inf Σ.
Diremo che A ∈ M se sup σ = inf Σ = l, e porremo in tal caso |A| = l. Osserviamo che, se
int(A) = ∅, si ha σ = {0}: pertanto, se A è misurabile, allora |A| = 0.
Esempio 1.1. Il cerchio
A = {(x, y) ∈ R2 : x2 + y 2 6 1}
è misurabile.
Esempio 1.2. L’insieme
A = {(x, y) ∈ Q2 : 0 6 x 6 1, 0 6 y 6 1}
non è misurabile. Infatti, si ha int(A) = ∅, da cui sup σ = 0. D’altra parte, se Q ⊂ R2 è un
pluri-rettangolo t.c. A ⊆ Q, si ha anche [0, 1]2 ⊆ Q e quindi 1 6 |Q|, da cui inf Σ = 1.
CALCOLO INTEGRALE
3
Infine, se A ⊆ R2 è illimitato, consideriamo la successione di insiemi (An ) dove per ogni n ∈ N0
An = A ∩ [−n, n]2 .
Se An ∈ M per ogni n ∈ N0 poniamo A ∈ M e
|A| = sup |An | ∈ [0, +∞].
n∈N0
Ovviamente si ha R2 ∈ M, |R2 | = +∞. Seguono alcune proprietà della misura (che non
dimostriamo):
Lemma 1.3. Siano A, B ∈ M. Allora A ∪ B, A ∩ B, A \ B ∈ M. Inoltre:
(i)
(ii)
(iii)
(iv)
(v)
(vi)
|A| > 0;
|A ∪ B| 6 |A| + |B|;
|A ∪ B| = |A| + |B| − |A ∩ B|;
se |A ∩ B| = 0, |A ∪ B| = |A| + |B|;
se A ⊆ B, |A| 6 |B|;
se A ⊆ B, |B \ A| = |B| − |A|.
Siano a, b ∈ R t.c. a < b, e f : [a, b] → R una funzione limitata. Una decomposizione di [a, b] è data
da un insieme finito
D = {x0 , x1 , . . . xn }, a = x0 < x1 < . . . < xn = b.
Per ogni i ∈ {1, . . . n} la restrizione di f a [xi−1 , xi [ è limitata, siano quindi
mi =
inf
[xi−1 ,xi [
f, Mi =
sup f.
[xi−1 ,xi [
Definiamo la somma integrale inferiore e quella superiore indotte dalla decomposizione D:
sD =
n
X
mi (xi − xi−1 ), SD =
i=1
n
X
Mi (xi − xi−1 ).
i=1
Denotiamo inoltre
σ = {sD : D decomposizione di [a, b]},
Σ = {SD : D decomposizione di [a, b]}.
Gli insiemi σ, Σ sono separati in R:
Lemma 1.4. Siano D0 , D00 decomposizioni di [a, b]. Allora sD0 6 SD00 .
Dimostrazione. Se D0 = D00 la tesi è ovvia. Se D0 ⊆ D00 , allora si ha per le proprietà degli estremi
superiore e inferiore
sD0 6 sD00 6 SD00 6 SD00 ,
in particolare la tesi. Se infine D0 e D00 sono decomposizioni arbitrarie, introduciamo la decomposizione D000 = D0 ∪ D00 t.c. D0 , D00 ⊆ D000 , e per il caso precedente
sD0 6 sD000 6 SD000 6 SD00 ,
il che conclude la dimostrazione.
Il Lemma 1.4 si riformula nella seguente diseguaglianza, valida per ogni funzione limitata:
sup σ 6 inf Σ.
4
A. IANNIZZOTTO
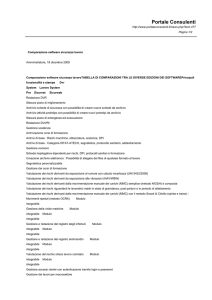
Figura 3. Approssimazione di Rf mediante pluri-rettangoli.
Definizione 1.5. La funzione limitata f : [a, b] → R è integrabile (secondo Riemann) se
sup σ = inf Σ = l,
e in tal caso il suo integrale è
Z
b
f (x) dx = l.
a
Il seguente criterio semplifica la Definizione 1.5:
Teorema 1.6. (Criterio di integrabilità di Riemann) Sia f : [a, b] → R limitata. Allora le seguenti
affermazioni sono equivalenti:
(i) f è integrabile;
(ii) per ogni ε > 0 esiste una decomposizione D di [a, b] t.c. SD − sD < ε.
Dimostrazione. Proviamo che (i) implica (ii). Fissato ε > 0, esistono due decomposizioni D0 , D00
di [a, b] t.c. SD00 − sD0 < ε. Posto D000 = D0 ∪ D00 , si ha
SD000 − sD000 6 SD00 − sD0 < ε.
Ovviamente, (ii) implica (i).
L’interpretazione geometrica della Definizione 1.5 è la seguente (fig. 3). Supponiamo che f sia
integrabile e che f (x) > 0 per ogni x ∈ [a, b], e definiamo il rettangoloide di f :
Rf = {(x, y) ∈ R2 : x ∈ [a, b], 0 6 y 6 f (x)}.
Allora si ha Rf ∈ M e
Z
|Rf | =
(1.1)
b
f (x) dx.
a
Infatti, fissata una decomposizione D di [a, b], sono definiti i pluri-rettangoli
n
n
[
[
PD =
[xi−1 , xi ] × [0, mi ], QD =
[xi−1 , xi ] × [0, Mi ].
i=1
i=1
Chiaramente PD , QD ∈ M, PD ⊆ Rf ⊆ QD (a meno di segmenti) e |PD | = sD , |QD | = SD (qui
usiamo il Lemma 1.3). Per il Teorema 1.6, per ogni ε > 0 esiste D t.c.
|QD | − |PD | < ε.
CALCOLO INTEGRALE
5
Dunque l’insieme Rf è misurabile e per definizione la sua misura è
|Rf | = sup σ = inf Σ.
Se f ha segno negativo o variabile, la precedente interpretazione geometrica sussiste, purché si
considerino negative le aree situate ’sotto’ l’asse ~x (ved. Sezione 3).
Osservazione 1.7. L’integrale di Riemann non ha solo un significato geometrico, ma anche un
importante significato fisico. Per esempio, consideriamo un viaggiatore che si sposta in linea retta
in un intervallo temporale [0, T ], con una velocità variabile data dalla funzione v : [0, T ] → R. Per
calcolare lo spostamento complessivo, possiamo dividere [0, T ] in n intervalli temporali mediante i
nodi
0 = t0 < t1 < . . . < tn = T.
Per ogni i ∈ {1, . . . n} scegliamo t̃i ∈ [ti−1 , ti ] e approssimiamo lo spostamento compiuto nell’intervallo [ti−1 , ti ] con v(t̃i )(ti − ti−1 ). Dunque lo spostamento totale viene approssimato
con
n
X
S=
v(t̃i )(ti − ti−1 ).
i=1
Facendo tendere n → ∞, se la funzione v è integrabile, si ha
Z T
S→
v(t) dt.
0
Similmente si calcolano il lavoro di una forza variabile e altre grandezze fisiche (ved. [6]).
Osservazione 1.8. Un’altra interpretazione importante dell’integrale di Riemann è quella probabilistica. Sia x una variabile aleatoria compresa in un intervallo [a, b], con una densità di probabilità
p : [a, b] → [0, 1], allora per ogni x1 , x2 ∈ [a, b], x1 < x2 , la probabilità dell’evento ’x1 6 x 6 x2 ’ è
Z x2
P (x1 6 x 6 x2 ) =
p(x) dx,
x1
in particolare
Z
P (a 6 x 6 b) =
b
p(x) dx = 1.
a
Le funzioni costanti a tratti sono integrabili (e il calcolo dei loro integrali è immediato):
Esempio 1.9. Sia f : [0, 2] → R definita da
(
1 se x ∈ [0, 1]
f (x) =
3 se x ∈]1, 2].
La decomposizione D = {0, 1, 2} dà
sD = SD = 4,
quindi f è integrabile e
Z
2
f (x) dx = 4.
0
Introduciamo alcune condizioni sufficienti per l’integrabilità di una funzione:
Teorema 1.10. Sia f : [a, b] → R continua. Allora f è integrabile.
6
A. IANNIZZOTTO
Dimostrazione. Per il Teorema di Weierstraß f è limitata, e per il Teorema di Cantor-Heine f
è uniformemente continua (ved. [4]). Fissato ε > 0, esiste δ > 0 t.c. per ogni x0 , x00 ∈ [a, b],
|x0 − x00 | < δ si ha
ε
|f (x0 ) − f (x00 )| <
.
b−a
Sia D = {x0 , . . . xn } una decomposizione di [a, b] t.c. xi − xi−1 < δ per ogni i ∈ {1, . . . n}, allora
SD − sD =
n
X
i=1
n
ε X
(xi − xi−1 ) = ε.
(Mi − mi )(xi − xi−1 ) <
b−a
i=1
Per il Teorema 1.6, f è integrabile.
Il Teorema 1.10 si estende al caso in cui la funzione integranda ha un insieme finito di punti di
discontinuità:
Corollario 1.11. Siano f : [a, b] → R limitata, z1 , . . . zm ∈ [a, b] (m ∈ N0 ) t.c. f è continua in
[a, b] \ {z1 , . . . zm }. Allora f è integrabile in [a, b].
Dimostrazione. Per semplicità supponiamo che f abbia un solo punto di discontinuità z ∈]a, b[
(gli altri casi si trattano in modo simile). Poiché f è limitata, poniamo
M = sup f − inf f > 0.
[a,b]
[a,b]
Fissato ε > 0, sia δ > 0 t.c.
ε
, z ± δ ∈]a, b[.
6M
La restrizione di f a [a, z − δ] è continua, quindi integrabile (Teorema 1.10). Per il Teorema 1.6
esiste una decomposizione D− di [a, z − δ] t.c.
ε
SD − − s D − < .
3
+
Similmente determiniamo una decomposizione D di [z + δ, b] t.c.
ε
SD+ − sD+ < .
3
Sia D = D− ∪ D+ , allora
SD − sD = (SD− − sD− ) + 2δ
sup f − inf f + (SD+ − sD+ )
δ<
[z−δ,z+δ]
[z−δ,z+δ]
2ε
+ 2δM
3
< ε.
6
Per il Teorema 1.6, f è integrabile.
Esempio 1.12. La funzione f : [−1, 1] → R definita da
(
arctan x1
se x 6= 0
f (x) =
0
se x = 0
è limitata e ha un’unica discontinuità in 0, dunque è integrabile.
Lemma 1.13. Sia f : [a, b] → R monotona. Allora f è integrabile.
CALCOLO INTEGRALE
7
Dimostrazione. Supponiamo f non-decrescente e non costante. Si ha per ogni x ∈ [a, b]
f (a) 6 f (x) 6 f (b),
quindi f è limitata. Fissato ε > 0, sia D = {x0 , . . . xn } una decomposizione di [a, b] t.c. per ogni
i ∈ {1, . . . n} si abbia
ε
.
xi − xi−1 <
f (b) − f (a)
Allora, per la monotonia di f ,
n
X
ε
SD − sD 6
(f (xi ) − f (xi−1 )) = ε.
f (b) − f (a)
i=1
Per il Teorema 1.6, f è integrabile.
Proprietà dell’integrale (di dimostrazione immediata):
Lemma 1.14. Siano f, g : [a, b] → R integrabili. Allora:
(i) f è integrabile in [c, d] per ogni c, d ∈ R, a 6 c < d 6 b;
Z b
Z c
Z b
(ii)
f (x) dx =
f (x) dx +
f (x) dx per ogni c ∈]a, b[;
a
a
c
(iii) αf + βg : [a, b] → R è integrabile per ogni α, β ∈ R, e
Z b
Z b
Z b
(αf (x) + βg(x)) dx = α
f (x) dx + β
g(x) dx;
a
a
Z
b
(iv) se f (x) 6 g(x) per ogni x ∈ [a, b], allora
Z
a
b
f (x) dx 6
g(x) dx;
Z d
Z b
(v) se f (x) > 0 per ogni x ∈ [a, b] e c, d ∈ R, a 6 c < d 6 b, allora
f (x) dx 6
f (x) dx;
c
a
Z
Z
b
b
(vi) x 7→ |f (x)| è integrabile e f (x) dx 6
|f (x)| dx.
a
a
a
a
La media di una variabile continua (estensione naturale del concetto di media aritmetica di un
insieme finito di numeri) è definita da un integrale del tipo
Z b
1
f (x) dx.
(1.2)
f=
b−a a
Teorema 1.15. (Media integrale) Sia f : [a, b] → R integrabile. Allora
Z b
1
inf f 6
f (x) dx 6 sup f (x).
b−a a
[a,b]
[a,b]
Dimostrazione. Basta considerare la decomposizione D = {a, b}, per la quale si ha
sD = inf f (b − a), SD = sup f (b − a),
[a,b]
[a,b]
e concludiamo.
Il Teorema 1.15 diventa più significativo nel caso delle funzioni continue:
Corollario 1.16. Sia f : [a, b] → R continua. Allora esiste c ∈ [a, b] t.c.
Z b
1
f (c) =
f (x) dx.
b−a a
8
A. IANNIZZOTTO
Figura 4. La media integrale.
Dimostrazione. Segue dal Teorema 1.15 e dal Teorema dei valori intermedi (ved. [4]).
L’interpretazione geometrica del Corollario 1.16 (se f (x) > 0 per ogni x ∈ [a, b]) è la seguente: il
rettangoloide Rf ha la stessa area del rettangolo [a, b] × [0, f (c)], per un opportuno c ∈ [a, b] (fig.
4).
La Definizione 1.5 richiede a < b. Formalmente, essa si può estendere al caso di intervalli ’negativi’
ponendo per ogni f : [a, b] → R integrabile
Z a
Z b
f (x) dx = −
f (x) dx.
b
a
Inoltre, per ogni x ∈ [a, b] la restrizione di f all’intervallo [a, x] è integrabile (Lemma 1.14 (i)),
dunque si definisce la funzione integrale di f come F : [a, b] → R ponendo per ogni x ∈ [a, b]
Z x
f (t) dt.
(1.3)
F (x) =
a
A questo punto, rimane il problema di calcolare l’integrale di una funzione. Riportiamo due esempi
trattati con metodi diversi:
Esempio 1.17. Sia f : [0, 1] → R, f (x) = x2 . Per il Teorema 1.10, f è integrabile. Per calcolare
l’integrale, ovvero l’area del rettangoloide
Rf = {(x, y) ∈ R2 : x ∈ [0, 1], 0 6 y 6 x2 },
usiamo il metodo di esaustione. Basta approssimare Rf dall’interno e dall’esterno mediante
due successioni di pluri-rettangoli, le cui aree convergano allo stesso limite. Per ogni n ∈ N0
consideriamo la decoposizione Dn di nodi
0<
Per ogni i ∈ {1, . . . n} si ha mi =
sn =
1
2
n−1
< < ... <
< 1.
n
n
n
(i−1)2
, Mi
n2
n
X
1
n3
=
i2
,
n2
(i − 1)2 =
i=1
da cui le somme integrali
(n − 1)n(2n − 1)
,
6n3
CALCOLO INTEGRALE
Sn =
9
n
1 X 2 n(n + 1)(2n + 1)
.
i =
n3
6n3
i=1
Passando al limite per n → ∞, si ha sn , Sn → 13 , da cui
Z 1
1
x2 dx = .
3
0
Esempio 1.18. Sia f : [0, π2 ] → R, f (x) = cos(x). Per il Teorema 1.10, f è integrabile. Per
calcolare il suo integrale, introduciamo un’arbitraria decomposizione D = {x0 , . . . xn } di [0, π2 ],
quindi applichiamo il Teorema di Lagrange (ved. [5]) alla funzione x 7→ sin(x): per ogni i ∈ {1, . . . n}
esiste x̃i ∈]xi−1 , xi [ t.c.
sin(xi ) − sin(xi−1 ) = cos(x̃i )(xi − xi−1 ),
quindi si ha
mi (xi − xi−1 ) 6 sin(xi ) − sin(xi−1 ) 6 Mi (xi − xi−1 ).
Sommando, si ottiene facilmente
π sD 6 sin
− sin(0) 6 SD ,
2
da cui per la Definizione 1.5
Z π
π 2
cos(x) dx = sin
− sin(0) = 1.
2
0
Dei due metodi esposti sopra per il calcolo degli integrali, quello dell’Esempio 1.18 è assai più
generale e utile di quello dell’Esempio 1.17, come sarà chiarito nella Sezione 3.
Esercizio 1.19. Sia A ⊂ R2 un insieme misurabile. Dimostrare che per ogni (x̄, ȳ) ∈ R2 l’insieme
traslato
Ā = {(x + x̄, y + ȳ) : (x, y) ∈ A}
è misurabile e |Ā| = |A|.
Esercizio 1.20. Calcolare, mediante un integrale, l’area del triangolo di vertici (0, 0), (1, 0), (1, 2).
Esercizio 1.21. Dimostrare (per induzione) le formule usate nell’Esempio 1.17.
Esercizio 1.22. Dimostrare il Lemma 1.14.
2. Integrazione indefinita
In questa sezione introduciamo l’operazione inversa della derivazione (ved. [5]), detta integrazione
indefinita.
Definizione 2.1. Siano I ⊆ R un intervallo, f, F : I → R. Si dice che F è una primitiva di f se
(i) F è derivabile in I;
(ii) DF (x) = f (x) per ogni x ∈ I.
La primitiva di una funzione, se esiste, non è unica: per esempio, x 7→ x2 è una primitiva di
x 7→ 2x, come anche x 7→ x2 + 1.
Lemma 2.2. Siano f, F, G : I → R t.c. F è una primitiva di f . Allora le seguenti affermazioni
sono equivalenti:
(i) G è una primitiva di f ;
10
A. IANNIZZOTTO
(ii) esiste c ∈ R t.c. G(x) = F (x) + c per ogni x ∈ I.
Dimostrazione. Proviamo che (i) implica (ii). Se DF (x) = DG(x) = f (x) per ogni x ∈ I,
F − G : I → R è una funzione derivabile con derivata nulla, quindi è costante in I (ved. [5]). Nel Lemma 2.2 è essenziale che tutte le funzioni siano definite in un intervallo. Nel seguito
tratteremo solo questo caso, da cui si ricava quello di domini generali con ovvi adattamenti.
Esempio 2.3. Sia f : R \ {0} → R, f (x) = x1 . Allora le sue primitive sono tutte e sole le funzioni
F : R \ {0} → R definite da
(
ln(x) + c1
se x > 0
F (x) =
ln(−x) + c2 se x < 0,
per c1 , c2 ∈ R.
Definizione 2.4. Sia f : I → R dotata di una primitiva. L’integrale indefinito di f è l’insieme di
funzioni
Z
f (x) dx = {F : I → R : F è una primitiva di f }.
Osservazione 2.5. Confrontiamo le Definizioni 1.5 e 2.4. L’integrale (definito)
Z b
f (x) dx
a
è un numero reale, mentre l’integrale indefinito
Z
f (x) dx
è un insieme di funzioni. Il legame fra i due sarà chiarito nella Sezione 3.
Per il Lemma 2.2, nota una primitiva F di f , si può scrivere sinteticamente
Z
(2.1)
f (x) dx = F (x) + c, c ∈ R.
Esistono funzioni che non ammettono alcuna primitiva:
Esempio 2.6. La funzione segno è definita ponendo per ogni x ∈ R
−1 se x < 0
sgn(x) = 0
se x = 0
1
se x > 0.
Se F : R → R fosse una primitiva di sgn, si avrebbe
D− F (0) = −1, D+ F (0) = 1, DF (0) = 0,
assurdo (ved. [5]).
Invece, le funzioni continue ammettono primitive (ved. Sezione 3). Dalle formule delle derivate si
ricavano gli integrali indefiniti delle funzioni elementari (nei rispettivi intervalli di definizione):
Z
Z
Z
1
ax
xa+1
a
ax dx =
x dx =
+ c (a 6= −1),
dx = ln |x| + c,
+ c (a > 0, a 6= 1),
a+1
x
ln(a)
Z
Z
Z
1
sin(x) dx = − cos(x) + c,
cos(x) dx = sin(x) + c,
dx = tan(x) + c,
cos(x)2
CALCOLO INTEGRALE
Z
11
Z
Z
1
1
1
√
dx
=
−
cot(x)
+
c,
dx
=
arctan(x)
+
c,
dx = arcsin(x) + c,
2
sin(x)2
1 + x2
1
−
x
Z
Z
sinh(x) dx = cosh(x) + c,
cosh(x) dx = sinh(x) + c.
Presentiamo ora alcuni risultati grazie ai quali si possono combinare gli integrali elementari per
calcolarne di più complessi2.
Lemma 2.7. Siano f, g : I → R, α, β ∈ R. Allora
Z
Z
Z
(αf (x) + βg(x)) dx = α f (x) dx + β g(x) dx.
Dimostrazione. Siano F, G : I → R primitive di f , g rispettivamente. Allora, per ogni x ∈ I
D[αF (x) + βG(x)] = αf (x) + βg(x),
dunque αF + βG è una primitiva di αf + βg. Per il Lemma 2.2 si ha
Z
(αf (x) + βg(x)) dx = αF (x) + βG(x) + c,
il che conclude la dimostrazione.
Esempio 2.8. Usando il Lemma 2.7 possiamo integrare un polinomio f : R → R,
f (x) = an xn + an−1 xn−1 + . . . + a0 (n ∈ N, a0 , . . . an ∈ R).
Si ha
Z
f (x) dx =
an n+1 an−1 n
x
+
x + . . . a0 x + c.
n+1
n
In particolare,
Z
(x3 + 2x2 + 5) dx =
x4 2 3
+ x + 5x + c.
4
3
Esempio 2.9. Effettuando una decomposizione in somma, si ha
Z
Z 1 x2
1
−
dx
=
dx = x − arctan(x) + c.
x2 + 1
x2 + 1
Lemma 2.10. (Integrazione per parti) Siano f, g, F, G : I → R t.c. F è una primitiva di f e G è
una primitiva di g. Allora
Z
Z
f (x)G(x) dx = F (x)G(x) − F (x)g(x) dx.
Dimostrazione. Si ha per ogni x ∈ I
D[F (x)G(x)] = f (x)G(x) + F (x)g(x),
da cui per il Lemma 2.7 si conclude.
Il metodo di integrazione per parti si può usare in diversi modi:
• ponendo f (x) = 1 e ricavando
Z
Z
1 · G(x) dx = xG(x) − xg(x) dx;
• applicando la formula due volte per riottenere lo stesso integrale con segno opposto;
• derivando utili formule di ricorrenza per integrali dipendenti da un intero n.
2Nel seguito omettiamo gli intervalli di definizione delle funzioni, che vanno determinati caso per caso.
12
A. IANNIZZOTTO
Seguono alcuni esempi:
Esempio 2.11. Si ha
Z
Z
ln(x) dx = x ln(x) −
x·
1
dx = x ln(x) − x + c.
x
Esempio 2.12. Si ha, applicando due volte il Lemma 2.10,
Z
Z
ex sin(x) dx = −ex cos(x) + ex cos(x) dx
Z
x
x
= −e cos(x) + e sin(x) − ex sin(x) dx,
da cui
Z
ex sin(x) dx =
ex
(sin(x) − cos(x)) + c.
2
Esempio 2.13. Si ha, usando i Lemmi 2.10 e 2.7
Z
Z
2
cos(x) dx = sin(x) cos(x) + sin(x)2 dx
Z
= sin(x) cos(x) + (1 − cos(x)2 ) dx
Z
= sin(x) cos(x) + x − cos(x)2 dx,
da cui
Z
cos(x)2 dx =
x + sin(x) cos(x)
+ c.
2
Esempio 2.14. Calcoliamo l’integrale
Z
sinh(x) cosh(x) − x
+ c.
sinh(x)2 dx =
2
Infatti, integrando per parti si ha
Z
Z
2
sinh(x) dx = sinh(x) cosh(x) − cosh(x)2 dx
Z
= sinh(x) cosh(x) − x − sinh(x)2 dx,
da cui la conclusione.
Esempio 2.15. Si ha per ogni n ∈ N0 la seguente formula ricorsiva:
Z
Z
ln(x)n dx = x ln(x)n − n ln(x)n−1 dx,
in particolare
Z
ln(x)2 dx = x ln(x)2 − 2x ln(x) + 2x + c.
CALCOLO INTEGRALE
13
Usando il metodo di integrazione per parti, si può incorrere in un circolo vizioso. Per esempio,
Z
Z
1
cos(x)2 + sin(x)2
dx =
dx
cos(x)
cos(x)
Z
= sin(x) + sin(x) tan(x) dx
Z
= sin(x) − cos(x) tan(x) + cos(x)D[tan(x)] dx
Z
1
=
dx
cos(x)
(l’integrale si calcola per sostituzione, ved. Esempio 2.23). Tavolta è utile, per calcolare un integrale,
’cambiare variabile’.
Lemma 2.16. (Integrazione per sostituzione/1) Siano f : I → R, g : J → I derivabile. Allora
Z
hZ
i
f (g(x))Dg(x) dx =
f (t) dt
.
t=g(x)
Dimostrazione. Se F : I → R è una primitiva di f , allora
D[F ◦ g](x) = f (g(x))Dg(x),
da cui
hZ
f (t) dt
Z
i
t=g(x)
=
f (g(x))Dg(x) dx,
il che conclude la dimostrazione.
Con opportune scelte di f , dal Lemma 2.16 si deducono le seguenti formule:
Z
Z
Dg(x)
dx = ln |g(x)| + c,
eg(x) Dg(x) dx = eg(x) + c,
g(x)
Z
Z
Dg(x)
dx = arctan(g(x)) + c,
cos(g(x))Dg(x) dx = sin(g(x) + c
1 + g(x)2
e altre simili.
Esempio 2.17. Ponendo g(x) = x2 + 1 e f (t) = 1t nel Lemma 2.16 si ha
Z
hZ 1 i
2x
dx =
dt
= ln(x2 + 1) + c.
x2 + 1
t
t=x2 +1
Può essere utile combinare diversi metodi:
Esempio 2.18. Integrando prima per parti e poi per sostituzione, si ha
Z
Z
x
arctan(x) dx = x arctan(x) −
dx
1 + x2
1
= x arctan(x) − ln(1 + x2 ) + c.
2
Con i metodi fin qui introdotti si può studiare l’integrazione delle funzioni razionali. Siano
f, g : R → R due polinomi di gradi n, m ∈ N0 rispettivamente. La funzione razionale
x 7→
f (x)
g(x)
14
A. IANNIZZOTTO
è definita (e continua) nell’insieme A = R \ {x1 , . . . xh }, dove x1 , . . . xh ∈ R (h 6 m) sono le radici
di g. Dunque A è un’unione finita di intervalli aperti, in ognuno dei quali vale quanto segue.
Costruiamo un metodo generale, detto metodo delle frazioni semplici, partendo dai valori minimi
di n, m3:
(1) n = 0, m = 1. Possiamo porre f (x) = 1, g(x) = ax + b (a, b ∈ R, a > 0): per il Lemma 2.16
si ha
Z
f (x)
1
dx = ln(|ax + b|) + k.
g(x)
a
(2) n = 0, m = 2. Possiamo porre f (x) = 1, g(x) = ax2 + bx + c (a, b, c ∈ R, a > 0), quindi
calcoliamo ∆ = b2 − 4ac e distinguiamo tre sotto-casi:
(2.1) se ∆ > 0, esistono x1 , x2 ∈ R, x1 =
6 x2 t.c. g(x) = a(x − x1 )(x − x2 ), quindi troviamo
A, B ∈ R t.c.
B
A
f (x)
+
,
=
g(x)
x − x1 x − x2
da cui per i Lemmi 2.7, 2.16
Z
f (x)
dx = A ln(|x − x1 |) + B ln(|x − x2 |) + k;
g(x)
(2.2) se ∆ = 0, esiste x1 ∈ R t.c. g(x) = a(x − x1 )2 , da cui per il Lemma 2.16
Z
f (x)
1
dx = −
+ k;
g(x)
a(x − x1 )
(2.3) se ∆ < 0, allora usiamo la tecnica del ’completamento del quadrato’ ponendo
r
√a
√
b 2
b 2 4ac − b2
4ac − b2
2
+
=d
x+ √
+1 , d=
,
g(x) =
ax + √
4a
d
4a
2 a
2d a
Z
da cui per il Lemma 2.16 si ha
Z
i
√a
1
f (x)
1h
1
d
b √
√
√ + k.
√
=
dx = 2
dt
arctan
x
+
g(x)
d
t2 + 1 a
d
d a
2d a
t= da x+ 2db√a
(3) n = 1, m = 2. Possiamo porre f (x) = a0 x + b0 , g(x) = ax2 + bx + c (a0 , b0 , a, b, c ∈ R, a0 , a > 0),
quindi calcoliamo ∆ = b2 − 4ac e distinguiamo tre sotto-casi:
(3.1) se ∆ > 0, esistono x1 , x2 ∈ R (x1 6= x2 ) e A, B ∈ R t.c.
f (x)
A
B
=
+
;
g(x)
x − x1 x − x2
(3.2) se ∆ = 0, esistono x1 ∈ R, A, B ∈ R t.c.
f (x)
A
B
=
+
;
g(x)
x − x1 (x − x1 )2
(3.3) se ∆ < 0, esistono A, B ∈ R t.c.
f (x)
A(2ax + b)
B
= 2
+
;
g(x)
ax + bx + c ax2 + bx + c
da ognuno di questi sotto-casi possiamo ricondurci a (1)-(2).
3Qui denotiamo k la costante additiva.
CALCOLO INTEGRALE
15
(4) m > 3, n < m. Per il Teorema di scomposizione dei polinomi (ved. [1]) si può scomporre g nel
(x)
prodotto di polinomi di grado 1 o 2, cosı̀ che fg(x)
viene riformulata come somma di funzioni
razionali ricadenti nei casi (1)-(3).
(5) n > m. Per il Teorema della divisione euclidea (ved. [1]) esistono due polinomi q, r : R → R
t.c.
f (x) = g(x)q(x) + r(x)
e il grado di r è minore di m, da cui
f (x)
r(x)
= q(x) +
,
g(x)
g(x)
che ricade nei casi (1)-(4).
In effetti, conviene usare le formule precedenti (specialmente quella del sotto-caso (2.3)) solo come
modello e svolgere i calcoli caso per caso:
Esempio 2.19. Si ha:
Z
x2
x+1
dx = −3 ln(|x − 2|) + 4 ln(|x − 3|) + c,
− 5x + 6
Z
4
3x + 1
dx = 3 ln(|x − 1|) −
+ c,
− 2x + 1
x−1
Z
x + 3
1
1
√
√
dx
=
arctan
+ c,
x2 + 6x + 11
2
2
x2
Z
x−2
1
dx = ln(x2 + 2x + 2) − 3 arctan(x + 1) + c,
+ 2x + 2
2
Z
x+1
2
1
dx = ln(|x − 1|) − ln(x2 + x + 1) + c.
x3 − 1
3
3
x2
Esempio 2.20. Calcoliamo l’integrale
Z
x4
1
dx.
+1
Il denominatore si scompone (mediante completamento del quadrato) nel prodotto di due polinomi
di grado 2, irriducibili:
√
√
x4 + 1 = (x2 + 2x + 1)(x2 − 2x + 1).
Seguendo il modello del sotto-caso (2.3), cerchiamo A, B, C, D ∈ R t.c.
1
Cx + D
Ax + B
√
√
=
+
,
2
2
x4 + 1
x + 2x + 1 x − 2x + 1
il che corrisponde a risolvere il seguente sistema lineare:
A+C =0
−√2A + B + √2C + D = 0
√
√
A − 2B + C + 2D = 0
B + D = 1.
16
A. IANNIZZOTTO
La soluzione è A =
Z
1
√
,
2 2
1
B = 21 , C = − 2√
, D = 12 . Dunque ricaviamo
2
√
√
Z
Z
1
x+ 2
1
x− 2
1
√
√
dx = √
dx − √
dx
x4 + 1
2 2
x2 + 2x + 1
2 2
x2 − 2x + 1
√
Z
Z
1
2x + 2
1
1
√
√
= √
dx +
dx
2
2
4
4 2
x + 2x + 1
x + 2x + 1
√
Z
Z
1
2x − 2
1
1
√
√
− √
dx +
dx
2
2
4
4 2
x − 2x + 1
x − 2x + 1
x2 + √2x + 1 arctan(√2x + 1) + arctan(√2x − 1)
1
√
√
= √ ln
+
+ c.
4 2
x2 − 2x + 1
2 2
Lemma 2.21. (Integrazione per sostituzione/2) Siano f : I → R, g : J → I derivabile e biunivoca.
Allora
Z
hZ
i
f (x) dx =
f (g(t))Dg(t) dt
.
−1
t=g
(x)
Dimostrazione. Poiché g è biunivoca e derivabile (in particolare continua), essa è strettamente
monotona: supponiamo g crescente. È definita la funzione inversa g −1 : I → J. Applicando il
Lemma 2.16 alle funzioni t 7→ f (g(t))Dg(t) e x 7→ g −1 (x), si ha
Z
f (x)Dg(g −1 (x))Dg −1 (x) dx =
hZ
i
f (g(t))Dg(t) dt
t=g −1 (x)
.
Rammentando (ved. [5]) che Dg(g −1 (x))Dg −1 (x) = 1, concludiamo.
Esempio 2.22. Ponendo t = ex (cioè g(t) = ln(t)) nel Lemma 2.21, si ha
Z
hZ
1
1 i
1
dx
=
·
dt
ex + 1
t+1 t
t=ex
Z
hZ 1
i
1
=
dt −
dt
t
t+1
t=ex
h
i
= ln |t| − ln |t + 1|
x
t=e
= x − ln(ex + 1) + c.
Nell’integrazione di varie combinazioni di funzioni trigonometriche, il Lemma 2.21 viene usato
insieme alle seguenti formule:
sin(x)2 =
tan(x)2
1
tan(x)
, cos(x)2 =
, sin(x) cos(x) =
,
2
2
1 + tan(x)
1 + tan(x)
1 + tan(x)2
sin(x) =
2 tan( x2 )
1 − tan( x2 )2
,
cos(x)
=
.
1 + tan( x2 )2
1 + tan( x2 )2
CALCOLO INTEGRALE
17
Esempio 2.23. Riprendiamo il calcolo dell’integrale
Z
Z
1 + tan( x2 )2
1
dx =
dx
cos(x)
1 − tan( x2 )2
h Z 1 + t2 2
i
=
dt
1 − t2 1 + t2
t=tan( x2 )
hZ
i
2
=
dt
(1 − t)(1 + t)
t=tan( x2 )
x x = ln 1 + tan
− ln 1 − tan
+ c.
2
2
Esempio 2.24. Usando le formule precedenti e ponendo t = tan( x2 ) (cioè g(t) = 2 arctan(t)), si ha
Z
Z
1
dx =
2 sin(x) + cos(x) + 1
1 + tan( x2 )2
dx
4 tan( x2 ) + 2
h Z 1 + t2 2
i
=
dt
4t + 2 1 + t2
t=tan( x2 )
x
1
+ 1 + c.
= ln 2 tan
2
2
L’uso delle formule di integrazione per sostituzione non è semplice, in quanto occorre scegliere una
trasformazione opportuna secondo la natura della funzione integranda. Un espediente consiste
nella scelta della stessa integranda come nuova variabile di integrazione, ammesso che sia possibile.
Esempio 2.25. Calcolare l’integrale indefinito
Z r
1+
1
dx.
x
L’integranda è la funzione
r
x 7→
1+
1
,
x
che è derivabile nel suo insieme di definizione ] − ∞, −1[∪]0, +∞[ e decrescente in ognuno degli
intervalli che lo compongono. Poniamo dunque t = g −1 (x) con
g(t) =
t2
1
2t
, Dg(t) = − 2
.
−1
(t − 1)2
Per il Lemma 2.21 si ha
Z r
hZ
i
1
−2t2
q
1 + dx =
dt
.
x
(t2 − 1)2
t= 1+ x1
Calcoliamo dunque l’integrale nella variabile t, la cui integranda è una funzione razionale con
denominatore di grado 4, che si decompone facilmente. Occorre trovare A, B, C, D ∈ R t.c.
−2t2
A
B
C
C
=
+
+
+
.
2
2
2
(t − 1)
t + 1 t − 1 (t + 1)
(t − 1)2
18
A. IANNIZZOTTO
Sviluppando la somma a secondo membro ed eguagliando i coefficienti, troviamo il sistema lineare
A + B = 0
−A + B + C + D = −2
−A − B − 2C + 2D = 0
A − B + C + D = 0,
la cui unica soluzione è A = 21 , B = C = D = − 12 . Abbiamo dunque
Z
Z
Z
Z
Z
1
1
1
1
1
1
1
1
−2t2
dt =
dt −
dt −
dt −
dt
2
2
2
(t − 1)
2
t+1
2
t−1
2
(t + 1)
2
(t − 1)2
1
1
1
1
= ln(|t + 1|) − ln(|t − 1|) +
+
+ c.
2
2
2(t + 1) 2(t − 1)
Tornando alla variabile originaria, abbiamo
r
r
Z r
1 r
1
1 1
1
1
1 + dx = ln
1 + + 1 − ln 1 + − 1 + x 1 + + c.
x
2
x
2
x
x
Esempio 2.26. Calcoliamo l’integrale
Z p
x2 − 1 dx.
Applichiamo il Lemma 2.21 con g(t) = cosh(t), usando la formula
cosh(t)2 − sinh(t)2 = 1
e l’Esempio 2.14. Si ha
Z p
x2
− 1 dx =
=
hZ
sinh(t)2 dt
i
t=arccosh(x)
h sinh(t) cosh(t) − t
√
2
i
+c
t=arccosh(x)
x x2 − 1 − arccosh(x)
+ c.
2
Osserviamo infine che non tutte le funzioni dotate di primitive possono essere integrate in modo
elementare, secondo uno dei metodi qui illustrati: è il caso delle funzioni
=
sin(x)
2
, x 7→ e−x ,
x
le cui primitive non si possono esprimere in forma esplicita come combinazioni delle funzioni
elementari (per integrare queste funzioni servono tecniche più avanzate, ved. [6]). Per altri metodi
ed esempi sull’integrazione indefinita, ved. [7].
x 7→
Esercizio 2.27. Siano f : R → R pari e F : R → R una primitiva di f . Dimostrare che F è
dispari. E se f è dispari?
Esercizio 2.28. Ri-calcolare l’integrale dell’Esempio 2.13 usando il Lemma 2.7 e la formula
cos(2x) + 1
.
2
Esercizio 2.29. Nell’Esempio 2.12 abbiamo cominciato integrando sin(x) e derivando ex . Che
succede facendo la scelta inversa?
cos2 (x) =
CALCOLO INTEGRALE
19
Esercizio 2.30. Dimostrare che
Z
x − sin(x) cos(x)
sin(x)2 dx =
+ c.
2
Esercizio 2.31. Dimostrare per ogni n ∈ N0 le seguenti formule ricorsive:
Z
Z
xn cos(x) dx = xn sin(x) − n xn−1 sin(x) dx,
Z
xn sin(x) dx = −xn cos(x) + n
Z
xn−1 cos(x) dx.
Ricavare
Z
x2 sin(x) dx.
Esercizio 2.32. Verificare l’Esempio 2.23 derivando la primitiva ottenuta. Quindi calcolare
Z
1
dx.
sin(x)
Esercizio 2.33. Cacolare i seguenti integrali indefiniti:
Z
Z
Z
1
x2
2
dx,
dx,
xex dx,
2
x+1
x +x
Z
Z
2x
dx,
1 + 4x
Z
x
(x − x)2 dx,
x ln(x) dx,
Z
2
Z
Z
cosh(3x) dx,
sin(x)3 dx,
sin(x) cos(x)
dx,
1 + 2 cos(x)2
√
Z √
Z
sin( x)
cos(x)
x
√
dx,
e dx,
dx,
1 + sin(x)2
x
Z
Z
Z
1
x
√
dx,
dx,
e4x sin(2x) dx,
ex − 1
x+1
Z
Z
Z
x+2
sin(2x) − 2 sin(x)
1 − ex
dx,
dx,
dx,
x3 − 2x2
1 + cos(x)2
e2x + 1
Z
Z
1 + sin(x)
dx,
2 + cos(x)
Z
ln
√
x+1+
√
Z
x − 1 dx,
√
x+ x+1
dx,
x−5
Z √ 2
Z
Z
x +4
1 + 4e−2x
1
dx,
dx,
dx.
2
2x
4
x
1+e
x −1
Esercizio 2.34. (difficile) Calcolare l’integrale indefinito
Z
(ex − 2x) arcsin(x2 + 1 − ex ) dx.
20
A. IANNIZZOTTO
3. Il teorema fondamentale
Riprendiamo il concetto di integrale di Riemann e lo colleghiamo a quello di integrale indefinito,
seguendo il ragionamento delineato nell’Esempio 1.18. In questa sezione assumeremo a, b ∈ R,
a < b.
Teorema 3.1. (Fondamentale del calcolo integrale) Siano f : [a, b] → R continua, F : [a, b] → R
la funzione integrale definita da (1.3). Allora F è una primitiva di f .
Dimostrazione. Sia x0 ∈]a, b[ (i casi x0 = a, b si studiano analogamente). Dimostriamo che F
è derivabile in x0 e che F 0 (x0 ) = f (x0 ). Poiché x0 è interno all’insieme [a, b], esiste δ > 0 t.c.
Bδ (x0 ) ⊂ [a, b] (ved. [2]). Per il Lemma 1.14 (ii) e il Corollario 1.16, per ogni x ∈ Bδ (x0 ) \ {x0 }
esiste x̃ ∈ Bδ (x0 ) t.c.
Z
Z x0
i
F (x) − F (x0 )
1 h x
f (t) dt −
f (t) dt
=
x − x0
x − x0 a
a
Z x
1
=
f (t) dt
x − x 0 x0
= f (x̃).
Quando x → x0 , anche x̃ → x0 , cosı̀ per continuità di f si ha
lim
x→x0
F (x) − F (x0 )
= f (x0 ),
x − x0
il che conclude la dimostrazione.
Il risultato precedente fornisce una formula per il calcolo dell’integrale di Riemann di una funzione
continua:
Corollario 3.2. Siano f : [a, b] → R continua, G : [a, b] → R una primitiva di f . Allora
Z b
f (x) dx = G(b) − G(a).
a
Dimostrazione. La funzione f è integrabile per il Teorema 1.10. Per definizione di funzione integrale
(ved. (1.3)) si ha
Z b
f (x) dx = F (b) − F (a).
a
Inoltre, per il Teorema 3.1 F è una primitiva di f , quindi per il Lemma 2.2 esiste c ∈ R t.c.
G(x) = F (x) + c per ogni x ∈ [a, b], da cui la conclusione.
Il modo usuale per rappresentare la relazione appena dimostrata è il seguente:
Z b
b
(3.1)
f (x) dx = F (x) a ,
a
dove F : [a, b] → R è la funzione integrale definita in (1.3), o qualunque altra primitiva di f . Gli
integrali degli Esempi 1.17, 1.18 si possono calcolare mediante (3.1).
Esempio 3.3. Poiché x → cosh(x) è una primitiva di x 7→ sinh(x), applicando (3.1) si ha
Z 1
1 e + e−1
− 1.
sinh(x) dx = cosh(x) 0 =
2
0
CALCOLO INTEGRALE
21
Per mezzo del Teorema 3.1, i metodi di integrazione visti nella Sezione 2 producono altrettanti
metodi di integrazione definita (osserviamo che questi valgono solo per funzioni continue):
Lemma 3.4. Siano f, g : [a, b] → R continue, α, β ∈ R, F, G : [a, b] → R primitive di f , g
rispettivamente. Allora
Z b
b
(αf (x) + βg(x)) dx = αF (x) + βG(x) a .
a
Dimostrazione. Dal Lemma 2.7 e da (3.1).
Lemma 3.5. Siano f, g : [a, b] → R continue, F, G : [a, b] → R primitive di f , g rispettivamente.
Allora
Z b
Z b
b
f (x)G(x) dx = F (x)G(x) a −
F (x)g(x) dx.
a
a
Dimostrazione. Dal Lemma 2.10 e da (3.1).
Lemma 3.6. Siano f : [c, d] → R, g : [a, b] → [c, d] derivabile, crescente. Allora
Z b
Z d
f (g(x))Dg(x) dx =
f (t) dt.
a
c
Dimostrazione. Dal Lemma 2.16 e da (3.1).
Lemma 3.7. Siano f : [a, b] → R, g : [c, d] → [a, b] derivabile, crescente. Allora
Z b
Z d
f (x) dx =
f (g(t))Dg(t) dt.
a
c
Dimostrazione. Dal Lemma 2.21 e da (3.1).
Nei Lemmi 3.6, 3.7, se g è decrescente si inverte l’ordine degli estremi di integrazione.
Esempio 3.8. Calcoliamo i seguenti integrali:
Z 2
h ln(x)3 i2 ln(2)3
ln(x)2
dx =
=
,
x
3
3
1
1
Z 1
1
1
1 2 1
1
dx
=
dt
=
arctan
,
2
2 0 t2 + 1
2
2
0 x +4
Z 1
h
x i2 π
1
1
√
p
dx =
dx = arcsin
= ,
2
2 0
6
4 − x2
0 2 1 − (x/2)
Z 2
Z 1
Z 2
2
x|x − 1| dx =
(x − x ) dx +
(x2 − x) dx = 1,
Z
1
Z
0
1
0
Z
0
π
4
tan(x)2 dx =
0
Z
0
1
1
1
t2
π
dt = t − arctan(t) 0 = 1 − .
2
1+t
4
A volte è più conveniente calcolare a parte l’integrale indefinito e poi applicare (3.1):
22
A. IANNIZZOTTO
Esempio 3.9. Calcoliamo
π
2
Z
e4x sin(2x) dx.
0
Integrando due volte per parti si ha
Z
Z 4x
e4x
e
e4x sin(2x) dx =
sin(2x) −
cos(2x) dx
4
2
Z
e4x
e4x
1
=
e4 x sin(2x) dx,
sin(2x) −
cos(2x) −
4
8
4
da cui
Z
e4x
e4x
e4x sin(2x) dx =
sin(2x) −
cos(2x) + c.
5
10
Applicando (3.1) si ha
Z π
h e4x
iπ
2
e4x
e2π + 1
2
sin(2x) −
cos(2x) =
.
e4x sin(2x) dx =
5
10
10
0
0
Esempio 3.10. Calcoliamo l’integrale
Z
2
√
1
√
4 − x2
dx.
x
Applicando la trasformazione t = 4 − x2 e poi il metodo per l’integrazione delle funzioni razionali,
si ha
Z 2√
Z 0
4 − x2
−t2
dx = √
dt
2
x
1
3 4−t
Z 0 1
1 = √ 1+
−
dt
t−2 t+2
3
0
= t + ln(2 − t) − ln(t + 2) √3
√
√
√
= − 3 − ln(2 − 3) + ln(2 + 3).
Come sappiamo dalla formula (1.1), l’integrale di Riemann può essere usato per calcolare l’area di
alcuni sottoinsiemi misurabili di R2 .
Definizione 3.11. Siano f, g : [a, b] → R continue, t.c. f (x) 6 g(x) per ogni x ∈ [a, b]. L’insieme
Df,g = {(x, y) ∈ R2 : x ∈ [a, b], f (x) 6 y 6 g(x)}
è detto dominio normale (rispetto all’asse ~x). Inoltre, un insieme D ⊆ R2 che si ottiene come
unione finita di domini normali è detto dominio regolare.
Lemma 3.12. Sia Df,g ⊂ R2 un dominio normale. Allora Df,g ∈ M e
Z b
|Df,g | =
(g(x) − f (x)) dx.
a
Dimostrazione. Per semplicità consideriamo solo il caso 0 6 f 6 g. Detti Rf , Rg i rettangoloidi di
f , g rispettivamente, per (1.1) sappiamo che Rf , Rg ∈ M e
Z b
Z b
|Rf | =
f (x) dx, |Rg | =
g(x) dx.
a
a
CALCOLO INTEGRALE
23
Figura 5. Il dominio D.
Detto
R̃f = {(x, y) ∈ R2 : x ∈ [a, b], 0 6 y < f (x)},
si dimostra che R̃f ∈ M e |R̃f | = |Rf |. Dunque, per il Lemma 1.3 (vi) e per il Lemma 1.14 (iii)
abbiamo Df,g ∈ M e
Z b
|Df,g | = |Rg | − |R̃f | =
(g(x) − f (x)) dx,
a
il che conclude la dimostrazione.
Esempio 3.13. Calcoliamo l’area del dominio normale
D = {(x, y) ∈ R2 : x ∈ [0, 1], x2 6 y 6 x + 1}
(fig. 5). Per il Lemma 3.12 si ha
Z 1
h x2
x3 i 1 7
|D| =
(x + 1 − x2 ) dx =
+x−
= .
2
3 0 6
0
Esempio 3.14. Calcoliamo l’area del cerchio di raggio r > 0
D = {(x, y) ∈ R2 : x2 + y 2 6 r2 }.
L’insieme D è il dominio normale delimitato dalle funzioni continue f, g : [−r, r] → R, definite da
p
p
f (x) = − r2 − x2 , g(x) = r2 − x2 .
Per il Lemma 3.12 abbiamo
r
Z
|D| =
2
p
r2 − x2 dx.
−r
Applicando due sostituzioni (x = rt, t = cos(π − s)) otteniamo
Z r p
Z 1p
2 r2 − x2 dx = 2r2
1 − t2 dt
−r
−1
Z π
2
= 2r
sin(π − s)2 ds
0
h
= 2r2 −
π − s sin(π − s) cos(π − s) iπ
+
,
2
2
0
24
A. IANNIZZOTTO
Figura 6. Il dominio D = D1 ∪ D2 .
da cui infine
|D| = πr2 .
Osservazione 3.15. Quando si calcolano le aree mediante integrali occorre fare attenzione a un
particolare: agli insiemi situati nel semipiano y 6 0 viene attribuita area negativa. Dunque, per
conoscere la vera misura di un dominio che contiene parti situate sia ’sopra’ che ’sotto’ l’asse ~x
occorre calcolare separatamente le misure di tali parti usando il Lemma 3.12 e poi sommare i
risultati (in forza del Lemma 1.3 (iv)).
Per esempio, sia D il dominio delimitato dall’asse ~x, dalla curva y = cos(x) e dalle rette x = 0,
x = π (fig. 6). Esso si divide naturalmente in due parti:
n
h πi
o
D1 = (x, y) ∈ R2 : x ∈ 0, , 0 6 y 6 cos(x) ,
2
n
hπ i
o
2
D2 = (x, y) ∈ R : x ∈
, π , cos(x) 6 y 6 0 .
2
Si ha
Z π
π
2
|D1 | =
cos(x) dx = sin(x) 02 = 1,
Z π0
π
(− cos(x)) dx = − sin(x) π = 1,
|D2 | =
π
2
2
da cui |D| = 2. Osserviamo che
Z
|D| =
π
| cos(x)| dx,
0
invece
Z
π
cos(x) dx = 0.
0
Esercizio 3.16. Alla luce del Teorema 3.1, il Corollario 1.16 diventa ’quasi’ una riformulazione
del Teorema di Lagrange (ved. [5]). Qual è la differenza?
Esercizio 3.17. Calcolare i seguenti integrali:
Z π
Z 4
Z ln(2)
2
tan(x) + 1
x+2
1 − ex
dx,
dx,
dx,
2
2
3
2
e2x + 1
0 sin(x) + 3 cos(x)
3 x − 2x
0
CALCOLO INTEGRALE
Z
1
2
√
4 − x2
dx,
x2
Z
0
1
Z
1
ex (ex + 1)
dx,
6
25
7
√
x+ x+1
dx.
x−5
Esercizio 3.18. Data la funzione f :]0, 1] → R definita da
√
ln(1 + 3 x)
√
,
f (x) =
3
x
verificare che essa ha in 0 una discontinuità eliminabile. Trovare una strategia per calcolare
l’integrale
Z 1
f (x) dx.
0
Esercizio 3.19. (difficile) Calcolare l’integrale definito
Z 0
sin(x) cos(x)2
dx.
3
3
−π (cos(x) − 2)(| cos(x) | + 5)
Esercizio 3.20. Calcolare l’area del dominio di forma ellittica
o
n
x2 y 2
D = (x, y) ∈ R2 : 2 + 2 6 1 ,
a
b
con a, b > 0.
Esercizio 3.21. Calcolare l’area del dominio D delimitato inferiormente dalla retta di equazione
y = x − 2 e superiormente dalla parabola di equazione y = −x2 .
Esercizio 3.22. Calcolare l’area della corona circolare
D = {(x, y) ∈ R2 : 1 6 x2 + y 2 6 4}.
Esercizio 3.23. Calcolare l’area del dominio delimitato dalla curva y = x + 1 − ln(x) e dalle rette
y = 0, x = 12 , x = 2.
Esercizio 3.24. Calcolare l’area del dominio delimitato dalla curva y = xex e dalle rette y = 0,
x = ±1.
Esercizio 3.25. (difficile) Calcolare il limite
Rx
2
(et − 1) dt
lim
x→0
x3
(suggerimento: usare i Teoremi di de l’Hôpital).
0
4. Integrali generalizzati
Finora ci siamo occupati sempre di funzioni limitate, definite su intervalli compatti. Per rimuovere
queste due limitazioni occorre introdurre gli integrali generalizzati (o impropri), che si dividono in
tre tipi.
Definizione 4.1. (Integrale generalizzato del primo tipo) Siano a ∈ R, f : [a, +∞[→ R. La
funzione f è integrabile se
(i) f è integrabile
in [a, x] per ogni x > a;
Z x
(ii) lim
f (t) dt = l, l ∈ R.
x→+∞ a
26
A. IANNIZZOTTO
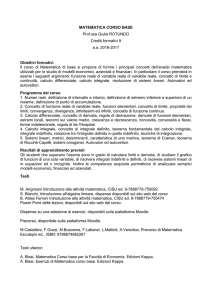
Figura 7. Le funzioni x 7→
1
xα
(α = 21 , 1, 2).
In questo caso l’integrale di f è
+∞
Z
f (x) dx = l.
a
La proprietà (i) si esprime dicendo che f è localmente integrabile. Qualora in (ii) si abbia l = ±∞,
scriveremo
Z +∞
f (x) dx = ±∞,
a
senza che ciò significhi che f è integrabile. La definizione di integrale generalizzato su intervalli del
tipo ] − ∞, b] è analoga4. Se f : R → R ed esiste c ∈ R t.c. f è integrabile sia in ] − ∞, c] che in
[c, +∞[, allora diremo che f è integrabile in R e porremo
Z +∞
Z c
Z +∞
f (x) dx =
f (x) dx +
f (x) dx.
−∞
−∞
c
Esempio 4.2. Siano α > 0, f : [1, +∞[→ R definita da
1
f (x) = α
x
(fig. 7). Essa è continua, quindi localmente integrabile (Teorema 1.10). La condizione (ii) chiama
in causa α in quanto, per ogni x > 1, si ha
1−α
Z x
−1
x
1
se α 6= 1,
dt
=
1
−
α
α
1 t
ln(x)
se α = 1.
Dunque, (ii) è verificata solo per α > 1 e si ha
Z +∞
1
1
dx =
,
α
x
α−1
1
mentre per α ∈]0, 1] si ha
Z
+∞
1
dx = +∞
xα
1
(si noti la ’somiglianza’ con la serie armonica generalizzata, ved. [3]).
4Per brevità, svolgeremo questa teoria solo per il caso di intervalli illimitati superiormente.
CALCOLO INTEGRALE
27
Per verificare l’integrabilità (in senso generalizzato) di una funzione non è sempre necessario
calcolarne l’integrale:
Teorema 4.3. (Criterio di Cauchy) Sia f : [a, +∞[→ R localmente integrabile. Allora le seguenti
affermazioni sono equivalenti:
(i) f è integrabile;
(ii) per ogni ε > 0 esiste M > a t.c. per ogni x1 , x2 ∈ R, M < x1 < x2 si ha
Z x2
f (x) dx < ε.
x1
Dimostrazione. Segue dalla Definizione 4.1 e dal criterio di Cauchy per i limiti di funzioni (ved.
[4]).
Il seguente lemma presenta alcune proprietà che si possono utilizzare per verificare l’integrabilità
di una funzione:
Lemma 4.4. Siano f, g : [a, +∞[→ R localmente integrabili. Allora si ha:
(i) se f , g sono integrabili, per ogni α, β ∈ R αf + βg è integrabile e
Z +∞
Z +∞
Z +∞
(αf (x) + βg(x)) dx = α
f (x) dx + β
g(x) dx;
a
a
a
(ii) se 0 6 f (x) 6 g(x) per ogni x ∈ [a, +∞[ e g è integrabile, f è integrabile e
Z +∞
Z +∞
06
f (x) dx 6
g(x) dx;
a
a
(iii) se f (x), g(x) > 0 per ogni x ∈ [a, +∞[, g è integrabile e
lim
x→+∞
f (x)
= l, l ∈ R,
g(x)
f è integrabile;
(iv) se x 7→ |f (x)| è integrabile, f è integrabile;
(v) se f è integrabile e continua, si ha
lim f (x) = 0.
x→+∞
Dimostrazione. Dimostriamo (i). La funzione αf + βg è localmente integrabile per il Lemma 1.14
(iii), e per i risultati di [4] si ha
Z b
Z +∞
Z +∞
f (x) dx + β
g(x) dx.
lim
(αf (t) + βg(t)) dt = α
x→+∞ a
a
a
Dimostriamo (ii). Segue dal Lemma 1.14 (iv).
Dimostriamo (iii). Supponiamo l > 0 (se l = 0 si procede analogamente), allora esiste M > a
t.c. per ogni x > M si ha 0 6 f (x) < (l + 1)g(x), e (l + 1)g è integrabile per (i). Dunque f è
integrabile per (ii).
Dimostriamo (iv). Ricordiamo che per ogni x ∈ [a, +∞[ si ha
f (x) = f + (x) − f − (x), |f (x)| = f + (x) + f − (x),
con f ± (x) > 0. Dunque basta applicare (ii) e (i).
28
A. IANNIZZOTTO
Dimostriamo (v). Supponiamo f (x) > 0 per ogni x ∈ [a, +∞[, e procediamo per assurdo: esistano
ε > 0, M > 0 t.c. f (x) > ε per ogni x > M , da cui
Z x+1
f (t) dt > ε,
x
contro la (ii) del Teorema 4.3, e quindi contro l’integrabilità di f . Se f è di segno variabile, si
usano come sopra f ± .
Per stabilire se una funzione f : [a, +∞[→ R, localmente integrabile (per esempio continua), è
integrabile in senso generalizzato, si può usare una delle precedenti proprietà e confrontarla con
una funzione di cui si conosce il carattere (tipicamente una di quelle studiate nell’Esempio 4.2).
Esempio 4.5. La funzione
cos(x)
x2
è integrabile in [π, +∞[ per il Lemma 4.4 (ii) e (iv), in quanto
cos(x) 1
6 2
x2
x
x 7→
1
e x 7→ x12 è integrabile (Esempio 4.2). La funzione x 7→ ln(x)
non è integrabile in [2, +∞[ per (iii),
in quanto
ln(x)−1
= +∞.
lim
x→+∞ x−1
La funzione
1
x 7→ √
2
x +x
non è integrabile in [1, +∞[ per (iii), in quanto
1
(x2 + x)− 2
lim
= 1.
x→+∞
x−1
2
Esempio 4.6. La funzione di Gauß x 7→ e−x è integrabile in R in quanto è continua e
2
e−x
= 0.
|x|→+∞ x−2
lim
Come visto nella Sezione 2, tuttavia, il suo integrale non si può calcolare con metodi elementari
√
(vale π).
Osserviamo che l’implicazione (iv) del Lemma 4.4 non si può invertire.
Esempio 4.7. La funzione
sin(x)
x
è integrabile in [π, +∞[. Infatti essa è continua e per ogni x > π si ha
Z x
h cos(t) ix Z x cos(t)
sin(t)
dt = −
−
dt.
t
t
t2
π
π
π
x 7→
Quando x → +∞, si ha
lim
x→+∞
h
−
cos(t) ix
1
= ,
t
π
π
CALCOLO INTEGRALE
mentre
Z
29
x
cos(t)
dt
t2
esiste in R per l’Esempio 4.5 (anche questo integrale non si può calcolare con tecniche elementari).
Tuttavia, la funzione in esame non è assolutamente integrabile per il Teorema 4.3, in quanto per
ogni k ∈ N si ha
Z (k+1)π k−1 Z (n+1)π X
sin(x) sin(x) dx =
dx
x
x
π
n=1 nπ
k−1 Z (n+1)π
X
| sin(x)|
dx
>
(n + 1)π
nπ
lim
x→+∞ π
n=1
k−1
2X 1
=
,
π
n+1
n=1
e l’ultima quantità diverge positivamente per k → ∞ (perché?).
Osservazione 4.8. Fra gli integrali generalizzati del primo tipo e le serie numeriche (ved. [3])
esiste una relazione naturale. Per esempio, sia f : [0, +∞[→ [0, +∞[ una funzione continua,
non-crescente, t.c.
Z +∞
f (x) dx = l ∈ R.
0
Studiamo il carattere della serie
∞
X
f (n).
n=1
Questa è una serie a termini non-negativi, quindi possiamo applicare il criterio del confronto. Sia
per ogni n ∈ N0
Z n
an =
f (x) dx.
n−1
P
La serie ∞
n=1 an è anch’essa a termini non-negativi e converge a l, per additività dell’integrale:
infatti, per ogni k ∈ N0 si ha
Z k
k
X
an =
f (x) dx
0
n=1
e il secondo membro tende a l per k → ∞. D’altra parte, la monotonia di f e il Teorema 1.15
implicano f (n) 6 an per ogni n ∈ N0 , da cui
∞
X
f (n) 6 l.
n=1
Per esempio, lo studio della serie armonica generalizzata si può basare sull’Esempio 4.2.
La seconda estensione, indipendente dalla prima, dell’integrale di Riemann riguarda le funzioni
(possibilmente) illimitate.
Definizione 4.9. (Integrale generalizzato del secondo tipo) Siano a, b ∈ R, a < b, f :]a, b] → R.
La funzione f è integrabile se
(i) f è integrabile in [x, b] per ogni x ∈]a, b[;
30
A. IANNIZZOTTO
Z
x→a+
b
f (t) dt = l, l ∈ R.
(ii) lim
x
In questo caso l’integrale di f è
Z
b
f (x) dx = l.
a
Chiaramente, se f è integrabile secondo Riemann in [a, b], lo è anche secondo la Definizione 4.9 e i
due integrali hanno lo stesso valore. La definizione di integrale generalizzato su intervalli del tipo
[a, b[ è analoga. Infine, se f :]a, b[→ R ed esiste c ∈]a, b[ t.c. f è integrabile sia in ]a, c] che in [c, b[,
diremo che f è integrabile in ]a, b[ e
Z c
Z b
Z b
f (x) dx =
f (x) dx +
f (x) dx.
a
a
c
Esempio 4.10. Con metodi analoghi a quelli dell’Esempio 4.2 si vede che la funzione
1
x 7→ α (α > 0)
x
è integrabile in ]0, 1] se e solo se α ∈]0, 1[, e in tal caso si ha
Z 1
1
1
dx =
.
α
1−α
0 x
I seguenti risultati si dimostrano come il Teorema 4.3 e il Lemma 4.4:
Teorema 4.11. (Criterio di Cauchy) Sia f :]a, b] → R localmente integrabile. Allora le seguenti
affermazioni sono equivalenti:
(i) f è integrabile;
(ii) per ogni ε > 0 esiste δ ∈ (0, b − a) t.c. per ogni x1 , x2 ∈ R, a < x1 < x2 < a + δ si ha
Z x2
f
(x)
dx
< ε.
x1
Lemma 4.12. Siano f, g :]a, b] → R localmente integrabili. Allora si ha:
(i) se f , g sono integrabili, per ogni α, β ∈ R αf + βg è integrabile e
Z b
Z b
Z b
(αf (x) + βg(x)) dx = α
f (x) dx + β
g(x) dx;
a
a
a
(ii) se 0 6 f (x) 6 g(x) per ogni x ∈]a, b] e g è integrabile, f è integrabile e
Z b
Z b
06
f (x) dx 6
g(x) dx;
a
a
(iii) se f (x), g(x) > 0 per ogni x ∈]a, b], g è integrabile e
lim
x→b−
f (x)
= l, l ∈ R,
g(x)
f è integrabile;
(iv) se x 7→ |f (x)| è integrabile, f è integrabile.
Esempio 4.13. Usando il Lemma 4.12 e l’Esempio 4.10, si dimostra che: x 7→ ln(x) non è
1
integrabile in ]0, 1], x 7→ √ 1
è integrabile in ]0, 1], x 7→ 1−cos(x)
non è integrabile in ]0, 1].
sin(x)
Infine consideriamo il caso misto:
CALCOLO INTEGRALE
31
Definizione 4.14. (Integrale generalizzato del terzo tipo) Siano a ∈ R, f :]a, +∞[→ R. La
funzione f è integrabile se
(i) f è integrabile
in ]a, x] per ogni x ∈]a, +∞[ (nel senso della Definizione 4.9);
Z x
(ii) lim
f (t) dt = l, l ∈ R.
x→+∞ a
In questo caso l’integrale di f è
+∞
Z
f (x) dx = l.
a
Simili definizioni si introducono per funzioni definite su intervalli del tipo ] − ∞, b[ e per funzioni
definite in R e illimitate. Dagli Esempi 4.2, 4.10 deduciamo che la funzione
1
(α > 0)
xα
non è integrabile in ]0, +∞[ per alcun valore di α.
x 7→
Esempio 4.15. Studiamo l’integrale generalizzato
Z +∞
x ln(x) dx.
0
La funzione f :]0, +∞[→ R definita per ogni x ∈ R da f (x) = x ln(x) è continua. Sappiamo che
lim f (x) = 0,
x→0+
dunque f è integrabile (nel senso della Definizione 4.9) in ]0, 1]. D’altra parte, poiché
lim f (x) = +∞,
x→+∞
dal Lemma 4.4 (v) segue che f non è integrabile (nel senso della Definizione 4.1) in [1, +∞[.
Dunque non è integrabile (nel senso della Definizione 4.14) in ]0, +∞[, precisamente si ha
Z +∞
x ln(x) dx = +∞.
0
Esempio 4.16. Studiamo l’integrale generalizzato
Z +∞
ln(x2 + 1)
dx.
x2
1
Prima verifichiamo che la funzione f : [1, +∞[→ [0, +∞[, f (x) =
lim
x→+∞
f (x)
− 32
ln(x2 +1)
x2
ln(x2 + 1)
√
= 0,
x→+∞
x
sia integrabile:
= lim
x
dunque f è integrabile per il Lemma 4.4 (iii). Quindi calcoliamo l’integrale: per ogni x > 1 si ha
Z x
Z x
h 1
ix
ln(t2 + 1)
1
2
dt = − ln(t + 1) + 2
dt
2
2
t
t
t
+1
1
1
1
x
ln(x2 + 1)
= ln(2) −
+ 2 arctan(t) 1
x
ln(x2 + 1)
π
= ln(2) − + 2 arctan(x) −
.
2
x
32
A. IANNIZZOTTO
Passando al limite per x → +∞ abbiamo
Z +∞
ln(x2 + 1)
π
dx = ln(2) + .
2
x
2
1
Esercizio 4.17. Studiare la convergenza dei seguenti integrali generalizzati:
Z +∞
Z 1
Z 2
x+2
1
ln(x − 1)
√
dx,
,
dx,
3
x −1
2−x
1−x 1
1
0
√
Z 1
Z 1
Z 1
ln( 3 x + 1)
1 − cos(x)2
sin(x)
√
dx,
dx,
dx,
3
2
x ln(x)
x
0
0
0 x−x
Z 1
Z +∞
Z 2
1
1
1
p
dx,
dx,
dx.
3
x
ln(x)
x
ln(x)
1 − cos(x)
−1
2
1
Riferimenti bibliografici
[1]
[2]
[3]
[4]
[5]
[6]
[7]
A. Iannizzotto, Pan di Via per i corsi di Analisi Matematica. 15
A. Iannizzotto, Insiemi numerici. 2, 20
A. Iannizzotto, Successioni e serie numeriche. 1, 26, 29
A. Iannizzotto, Limiti e continuità. 6, 8, 27
A. Iannizzotto, Calcolo differenziale. 9, 10, 16, 24
C.D. Pagani, S. Salsa, Analisi matematica 1, Zanichelli (2015). 5, 18
S. Salsa, A. Squellati, Esercizi di analisi matematica 1, Zanichelli (2011). 18
Dipartimento di Matematica e Informatica
Università degli Studi di Cagliari
Viale L. Merello 92, 09123 Cagliari, Italy
E-mail address: [email protected]