INTRODUZIONE ALLA TEORIA DEI GIOCHI
ANTONIO IANNIZZOTTO
Sommario. In questi appunti intendiamo offrire una breve ma rigorosa introduzione alla
teoria dei giochi, utilizzabile per i corsi di laurea magistrale o di dottorato di ricerca
in matematica. Il corso è incentrato principalmente sugli aspetti teorici della disciplina:
definizioni formali di gioco, utilità e soluzione; cenni di analisi multivoca; concetto di
equilibrio di Nash; giochi statici non-cooperativi e cooperativi; giochi a somma nulla;
teoremi di minimax; giochi dinamici; rappresentazione mediante grafi. Infine vengono
presentate diverse applicazioni, con particolare attenzione ai modelli economici.
Ringraziamo la Prof.ssa Ornella Naselli, del Dipartimento di Matematica e Informatica
dell’Università degli Studi di Catania, per i molti e preziosi chiarimenti che ci ha offerto su
questo argomento.
Indice
1. Introduzione: giochi, soluzioni ed equilibri
1.1. Notazioni
2. Multifunzioni
2.1. Multifunzioni fra spazi topologici
2.2. Selezioni continue
2.3. Punti fissi
2.4. Il principio KKM
3. Giochi non cooperativi ed equilibri di Nash
3.1. Strategie miste e teorema di Nash
3.2. Esempi
3.3. Equilibri approssimati
4. Giochi a somma nulla e teoria del minimax
4.1. Alcuni teoremi di minimax
5. Giochi cooperativi
5.1. Valore di Shapley
5.2. Esempi
6. Cenni sui giochi dinamici
6.1. Esempi
Riferimenti bibliografici
Versione del 15 aprile 2015
1
2
6
7
8
12
14
17
19
20
23
26
28
31
35
41
44
46
51
54
2
A. IANNIZZOTTO
1. Introduzione: giochi, soluzioni ed equilibri
Chi in cento battaglie riporta cento vittorie, non è il più abile in assoluto; al contrario, chi
non dà nemmeno battaglia, e sottomette le truppe dell’avversario, è il più abile in assoluto.
Sun Tzu
I primi matematici ad affrontare teoricamente il problema dei giochi furono Zermelo [37] e
Borel [3], con particolare anfasi sugli aspetti logici e probabilistici. Tuttavia, il maggior
contributo verso la formalizzazione di une teoria metematica dei giochi è dovuto a Von
Neumann [36]. La moderna teoria dei giochi rappresenta un tentativo di descrivere le
interazioni sociali (specialmente in campo economico) tra soggetti che, in competizione tra
loro, effettuano decisioni razionali cercando di ottenere il massimo vantaggio. Lo studio
ha finalità predittive: determinare, se possibile, la soluzione o le situazioni di equilibrio di
un’interazione prima che essa abbia luogo.
Per elaborare un modello di queste interazioni si ricorre al concetto di gioco, che può avere
diverse caratteristiche (statico, dinamico, non-cooperativo, cooperativo etc.): questo modello
risulta efficace in quanto permette di trascurare tutti gli gli aspetti dell’interazione non
attinenti alla strategia.
La teoria è stata applicata con successo, oltre che nelle scienze sociali, anche in biologia
(evoluzione di popolazioni di microorganismi), elettronica, scienze militari, psicologia e
filosofia morale (teoria della scelta razionale). Per un’ampia trattazione della materia
rimandiamo alle monografie di Aubin [1], Burger [6], Colombo [10], Gibbons [14],
McKinsey [23], Morgenstern [27], Morgenstern & von Neumann [28], e alla
raccolta di saggi di Kuhn & Tucker [22]. Per i collegamenti con l’analisi moderna,
rimandiamo a Rossi [32].
Dal punto di vista teorico, la teoria dei giochi costituisce un interessante crocevia di branche
mutuamente indipendenti della matematica quali la topologia, l’analisi multivoca, il calcolo
delle probabilità e la teoria dei grafi.
Introduciamo brevemente le definizioni-assiomi della teoria:
Definizione 1.1. Un gioco è un’interazione tra due o più decisori razionali e intelligenti,
detti giocatori. Un decisore è detto
(i) razionale se dispone di una preferenza sull’insieme degli esiti (vedi Definizione 1.2);
(ii) intelligente se persegue senza commettere errori la massima soddisfazione.
Un gioco statico rappresenta una situazione in cui tutti i giocatori effettuano le loro scelte
nello stesso momento, mentre in un gioco dinamico i giocatori scelgono secondo un certo
ordine temporale, adattando la strategia alle mosse degli altri giocatori. In un gioco
deterministico i giocatori scelgono in condizioni di certezza, ovvero sanno che un determinato
insieme di strategie conduce invariabilmente a un certo esito, mentre in un gioco stocastico,
dato un insieme di strategie, vi sono diversi esiti ciascuno con la sua probabilità. In un
gioco non-cooperativo i giocatori non possono stringere accordi vincolanti tra loro, mentre
in un gioco cooperativo possono. Un gioco statico deterministico non-cooperativo tra un
TEORIA DEI GIOCHI
3
insieme finito di giocatori P1 , . . . Pn (n > 2) è rappresentato da un complesso
(1.1)
Γ = (X1 , . . . Xn , E, h),
dove Xi è l’insieme delle strategie del giocatore Pi , E è l’insieme degli esiti e h : Πni=1 Xi → E
è la funzione che associa a ogni n-upla di strategie l’esito corrispondente.
Per compiere le proprie scelte, i giocatori hanno bisogno di un criterio:
Definizione 1.2. Una preferenza è una relazione binaria su un insieme E con le seguenti
proprietà:
(i) e e per ogni e ∈ E (riflessiva);
(ii) se e1 e2 e e2 e3 allora e1 e3 per ogni e1 , e2 , e3 ∈ E (transitiva);
(iii) e1 e2 o e2 e1 per ogni e1 , e2 ∈ E (completa);
(iv) se E è uno spazio topologico, allora l’insieme {e ∈ E : e ē} è chiuso per ogni
ē ∈ E (continua).
Se e1 e2 e non e2 e1 , si scrive e1 ≺ e2 . Se e1 e2 e e2 e1 , allora e1 , e2 sono detti
equivalenti (e1 ∼ e2 ).
Osservazione 1.3. Una preferenza non è un ordinamento: manca la proprietà antisimmetrica!
L’ipotesi di razionalità implica che il giocatore Pi dispone di una preferenza i su E. In
molti casi (come nelle scommesse), tale preferenza può essere quantificata.
Definizione 1.4. Un’utilità è una funzione u : E → R con le seguenti proprietà:
(i) per ogni e1 , e2 ∈ E, se e1 e2 , allora u(e1 ) 6 u(e2 );
(ii) per ogni e1 , e2 ∈ E, se e1 ≺ e2 , allora u(e1 ) < u(e2 ).
L’esistenza di una funzione di utilità non è ovvia. Vale in merito il Teorema di Rappresentazione (Kreps [21]):
Teorema 1.5. Siano E un insieme non vuoto e una preferenza su E:
(i) se |E| 6 ℵ0 , allora esiste un’utilità u : E → R;
(ii) se |E| 6 2ℵ0 , E è uno spazio topologico e è continua, allora esiste un’utilità
u : E → R continua.
Assumeremo sempre l’esistenza di un’utilità per ogni giocatore. Dunque il complesso (1.1)
si riformula come
(1.2)
Γ = (X1 , . . . Xn , f1 , . . . fn ),
dove fi = ui ◦ h : Πni=1 Xi → R è detta pay-off del giocatore Pi . Nel caso n = 2, usualmente
denoteremo P , Q i giocatori e Γ = (X, Y, f, g) e rappresenteremo i possibili risultati del
gioco in una (bi)matrice. Questa rappresentazione è detta in forma strategica.
Esempio 1.6. Il gioco del pari o dispari prevede due giocatori P (che vince se la somma è
pari), Q (che vince se la somma è dispari) con lo stesso insieme di strategie X = Y = {p, d}
e due esiti E = {vince P , vince Q}. Ovviamente ogni giocatore preferisce vincere, ergo
4
A. IANNIZZOTTO
attribuisce utilità 1 alla vittoria e −1 alla sconfitta. Il gioco è rappresentato dalla tabella
simmetrica:
P \Q p
d
p
(1, −1) (−1, 1)
d
(−1, 1) (1, −1)
Esempio 1.7. Il gioco della morra cinese (o carta, pietra e forbice) prevede due giocatori P ,
Q con lo stesso insieme di strategie X = Y = {c, p, f } e tre esiti E = {vince P , vince Q, pareggio}.
Per ogni giocatore, la vittoria vale 1, il pareggio 0 e la sconfitta −1. Il gioco è rappresentato
dalla tabella simmetrica:
P \Q
c
p
f
c
(0, 0)
(−1, 1)
(1, −1)
p
f
(1, −1) (−1, 1)
(0, 0)
(1, −1)
(−1, 1)
(0, 0)
In casi semplici, possiamo risolvere un gioco (ovvero, determinare come andranno effettivamente le cose) usando la tabella dei pay-off mediante il metodo delle eliminazioni iterate.
In particolare, se P e Q hanno strategie fortemente dominanti x e y, la soluzione del gioco
sarà (x, y).
Definizione 1.8. Nel gioco (1.2), siano xi , yi ∈ Xi due strategie. Si dice che
(i) xi domina fortemente yi se fi (z1 , . . . xi , . . . zn ) > fi (z1 , . . . yi , . . . zn ) per ogni (z1 , . . . zn ) ∈
Πj6=i Xj ;
(ii) xi domina strettamente yi se fi (z1 , . . . xi , . . . zn ) > fi (z1 , . . . yi , . . . zn ) per ogni
(z1 , . . . zn ) ∈ Πj6=i Xj ed esiste (z̄1 , . . . z̄n ) ∈ Πj6=i Xj t.c. fi (z̄1 , . . . xi , . . . z̄n ) >
fi (z̄1 , . . . yi , . . . z̄n );
(iii) xi domina debolmente yi se fi (z1 , . . . xi , . . . zn ) > fi (z1 , . . . yi , . . . zn ) per ogni (z1 , . . . zn ) ∈
Πj6=i Xj .
Inoltre, xi è detta fortemente (strettamente, debolmente) dominante se domina fortemente
(strettamente, debolmente) ogni altra strategia di Xi .
Nei giochi considerati negli Esempi 1.6, 1.7 nessun giocatore ha strategie dominanti. Seguono
alcuni esempi di soluzione per eliminazioni iterate per giochi con due giocatori:
Esempio 1.9. Consideriamo il seguente gioco:
P \Q y1
y2
x1
(1, 2) (0, 1)
x2
(0, 2) (2, 1)
Sia P il primo a giocare: egli osserva che y1 è per Q una strategia fortemente dominante,
quindi sceglie x1 (che gli permette la massima utilità). La soluzione del gioco è pertanto
(x1 , y1 ). La stessa soluzione è raggiunta se Q gioca per primo.
TEORIA DEI GIOCHI
5
Esempio 1.10. Consideriamo il seguente gioco:
P \Q
x1
x2
x3
y1
(3, 3)
(0, 2)
(1, 2)
y2
(2, 2)
(1, 1)
(0, 1)
Sia P il primo a giocare: egli osserva che y2 è fortemente dominata da y1 , dunque sceglie x1 ;
la soluzione è (x1 , y1 ). Se Q gioca per primo si perviene alla stessa soluzione.
Esempio 1.11. Consideriamo il seguente gioco:
P \Q
x1
x2
x3
y1
(3, 5)
(3, 0)
(0, 2)
y2
(2, 5)
(0, 2)
(2, 0)
Osserviamo che in questo gioco non esistono strategie fortemente dominanti. Sia P il primo
a giocare: x1 domina strettamente x2 e x3 ; se P elimina x2 , osserva che nel nuovo gioco
(ridotto) y1 domina strettamente y2 , dunque sceglie x1 e la soluzione è (x1 , y1 ); se invece
elimina x3 , un ragionamento analogo porta alla soluzione (x1 , y2 ). Se Q gioca per primo si
perviene alle stesse soluzioni.
Per risolvere queste ambiguità si introduce un concetto di equilibrio dovuto a Nash [29]:
Definizione 1.12. Nel gioco (1.2), la n-upla (x1 , . . . xn ) ∈ Πni=1 Xi è un equilibrio di Nash
se per ogni i ∈ {1, . . . n} si ha
fi (x1 , . . . xn ) > fi (x1 , . . . yi , . . . xn ) per ogni yi ∈ Xi .
L’insieme degli equilibri di Nash di Γ si denota Ne(Γ).
Nella tabella dei pay-off, un equilibrio di Nash corrisponde a una casella in cui la prima
componente è massima tra quelle della stessa colonna e la seconda è massima tra quelle
della stessa riga. I giochi degli Esempi 1.6, 1.7 non presentano equilibri di Nash. L’unico
equilibrio di Nash nell’Esempio 1.9 è (x1 , y1 ), nell’Esempio 1.10 è (x1 , y1 ). Nell’Esempio 1.11
ve ne sono due: (x1 , y1 ) e (x1 , y2 ). Ne deduciamo che
• un gioco può non avere alcun equilibrio di Nash;
• un gioco può avere più di un equilibrio di Nash;
• una strategia fortemente dominata non può essere componente di un equilibrio di
Nash;
• una strategia debolmente dominata può essere componente di un equilibrio di Nash.
Dunque, la risoluzione di un gioco per eliminazione delle strategie fortemente dominate
preserva gli equilibri di Nash (se ve ne sono), mentre la risoluzione per eliminazione delle
strategie debolmente dominate può sopprimerne alcuni.
Esempio 1.13. Nel gioco noto come battaglia dei sessi, una coppia deve decidere se andare
allo stadio (s) o a teatro (t); l’uomo (P ) preferisce andare allo stadio in compagnia che
6
A. IANNIZZOTTO
a teatro in compagnia, ma questo è pur sempre meglio che andare allo stadio da solo; la
donna (Q) ha preferenze analoghe. Il gioco è rappresentato dalla seguente tabella:
P \Q s
t
s
(10, 5) (0, 0)
t
(0, 0) (5, 10)
Dunque gli equilibri di Nash sono (s, s) e (t, t) (l’esperienza insegna, tuttavia, che la coppia
andrà a teatro).
Altri equilibri si possono determinare cambiando paradigma, cioè consentendo a ciascun
giocatore di ripartire la sua scelta tra le varie strategie (come uno speculatore che investe
parti del suo capitale su diversi titoli, variando gli investimenti secondo le sue aspettative):
questa è la teoria delle strategie miste, su cui torneremo in seguito.
Il problema dell’esistenza (e, in subordine, dell’unicità) dell’equilibrio di Nash richiede, per
essere risolto, un armamentario matematico alquanto avanzato, che presenteremo nella sua
forma più generale.
1.1. Notazioni. Introduciamo qui alcuni simboli e notazioni che saranno usati nel seguito:
Sotto- e sopralivelli: se X è un insieme e f : X → R, denotiamo
c
f c = {x ∈ X : f (x) < c}, f = {x ∈ X : f (x) 6 c},
fc = {x ∈ X : f (x) > c}, f c = {x ∈ X : f (x) > c}.
Spazi topologici: in uno spazio topologico (X, τ ), denotiamo σ la famiglia dei chiusi; per ogni
A ⊆ X denotiamo int(A) l’interno, cl(A) la chiusura, ∂A la frontiera di A, rispettivamente,
e τA la topologia indotta da τ su A; per ogni x ∈ X denotiamo U(x) la famiglia degli intorni
di x
Spazi metrici: in uno spazio metrico (X, d) denotiamo per ogni x ∈ X, S, T ⊆ X
d(x, S) = inf{d(x, y) : y ∈ S}, d(S, T ) = inf{d(x, y) : x ∈ S, y ∈ T },
n
o
dH (S, T ) = max sup d(x, T ), sup d(y, S) ,
x∈S
y∈T
e per ogni r > 0
Br (S) = {x ∈ X : d(x, S) < r}.
Spazi vettoriali: in uno spazio vettoriale X, per ogni S ⊆ X denotiamo
n
o
nX
span(S) =
λi xi : n ∈ N, λ1 , . . . λn ∈ R, x1 , . . . xn ∈ S ,
i=1
aff(S) =
n
nX
i=1
conv(S) =
n
nX
i=1
λi xi : n ∈ N, λ1 , . . . λn ∈ R,
n
X
o
λi = 1, x1 , . . . xn ∈ S ,
i=1
λi xi : n ∈ N, λ1 , . . . λn ∈ [0, 1],
n
X
i=1
o
λi = 1, x1 , . . . xn ∈ S .
TEORIA DEI GIOCHI
7
Spazi vettoriali-topologici: in uno spazio vettoriale-topologico (X, τ ), denotiamo X ∗ il duale
topologico di X, per ogni S ⊆ X denotiamo
cc(S) = cl conv(S) .
2. Multifunzioni
Who needs set-valued analysis?
J.P. Aubin & H. Frankowska
L’analisi multivoca estende la tradizionale analisi matematica al caso in cui i valori delle
funzioni non sono singoli elementi di un insieme bensı̀ suoi sottoinsiemi: questa scelta
corrisponde all’esigenza di studiare con i mezzi dell’analisi matematica fenomeni caratterizzati
da un alto grado di incertezza (come nella teoria dei controlli). Un altro contesto in cui
le multifunzioni risultano utili è lo studio di problemi differenziali con discontinuità (ved.
Chang [8] e Filippov [13]), con applicazioni in meccanica. In questa sezione introduciamo
le definizioni di base dell’analisi multivoca e alcuni teoremi di selezione e di punto fisso.
Per approfondimenti rimandiamo ai testi di Aubin & Frankowska [2] e di Krein &
Thompson [20].
Definizione 2.1. Siano X, Y insiemi non vuoti. Una multifunzione F : X → 2Y è una
funzione i cui valori sono sottoinsiemi di Y . Si denota
dom(F ) = {x ∈ X : F (x) 6= ∅},
F (S) = ∪x∈S F (x) per ogni S ⊆ X,
F − (T ) = {x ∈ X : F (x) ∩ T 6= ∅}, F + (T ) = {x ∈ X : F (x) ⊆ T } per ogni T ∈ 2Y ,
gr(F ) = {(x, y) ∈ X × Y : y ∈ F (x)}.
La multifunzione inversa IF : Y → 2Y è definita per ogni y ∈ Y da
IF (y) = {x ∈ X : y ∈ F (x)}.
Osservazione 2.2. Il concetto di multifunzione è, a rigore, identico a quello di relazione
binaria. A differenza da quanto avviene per le funzioni (univoche), ogni sottoinsieme di X ×Y
è il grafico di una multifunzione. Spesso, tuttavia, si restringe lo studio alle multifunzioni a
valori non vuoti (dom(F ) = X).
Alcune proprietà insiemistiche delle multifunzioni:
Lemma 2.3. Se F : X → 2Y è una multifunzione, allora:
(i)
(ii)
(iii)
(iv)
(v)
F − (T ) = X \ F + (Y \ T ) per ogni T ∈ 2Y ;
F + (T ) = X \ F − (Y \ T ) per ogni T ∈ 2Y ;
F − (∪i∈I Ti ) = ∪i∈I F − (Ti ) per ogni (Ti )i∈I ⊆ 2Y ;
F + (∩i∈I Ti ) = ∩i∈I F − (Ti ) per ogni (Ti )i∈I ⊆ 2Y ;
IF (y) = F − ({y}) per ogni y ∈ Y .
8
A. IANNIZZOTTO
2.1. Multifunzioni fra spazi topologici. Per le multifunzioni fra spazi topologici la
nozione di continuità ha diverse possibili estensioni:
Definizione 2.4. Siano (X, τX ), (Y, τY ) spazi topologici, x ∈ X, F : X → 2Y .
(i) F è semi-continua inferiormente (s.c.i.) in x se per ogni A ∈ τX t.c. F (x) ∩ A 6= ∅
esiste U ∈ UX (x) t.c. F (z) ∩ A 6= ∅ per ogni z ∈ U ;
(ii) F è semi-continua superiormente (s.c.s.) in x se per ogni A ∈ τX t.c. F (x) ⊆ A
esiste U ∈ UX (x) t.c. F (z) ⊆ A per ogni z ∈ U ;
(iii) F è semi-continua in x se per ogni A ∈ τX t.c. F (x) ⊆ A esiste U ∈ UX (x) t.c.
F (z) ∩ A 6= ∅ per ogni z ∈ U ;
(iv) F è continua in x se è s.c.i. e s.c.s. in x;
(v) F è s.c.i. (s.c.s., semi-continua, continua) in X se è s.c.i. (s.c.s., semi-continua,
continua) in ogni punto di X;
(vi) F è aperta se F (A) ∈ τY per ogni A ∈ τX ;
(vii) F è chiusa se F (C) ∈ σY per ogni C ∈ σX .
Caratterizzazioni della semi-continuità inferiore:
Lemma 2.5. Se (X, τX ), (Y, τY ) sono spazi topologici, F : X → 2Y , allora le seguenti sono
equivalenti:
(i) F è s.c.i.;
(ii) F − (A) ∈ τX per ogni A ∈ τY ;
(iii) F + (C) ∈ σX per ogni C ∈ σY ;
(iv) IF è aperta.
Caratterizzazioni della semi-continuità superiore:
Lemma 2.6. Se (X, τX ), (Y, τY ) sono spazi topologici, F : X → 2Y , allora le seguenti sono
equivalenti:
(i) F è s.c.s.;
(ii) F + (A) ∈ τX per ogni A ∈ τY ;
(iii) F − (C) ∈ σX per ogni C ∈ σY ;
(iv) IF è chiusa.
Tutte le nozioni di continuità introdotte per le multifunzioni sono equivalenti all’usuale
continuità nel caso univoco. Un caso speciale è quello delle multifunzioni i cui valori sono
intervalli reali:
Lemma 2.7. Se (X, τ ) è uno spazio topologico, a, b : X → R sono funzioni t.c. a(x) 6 b(x)
per ogni x ∈ X e F : X → 2R è definita da F (x) = [a(x), b(x)] per ogni x ∈ X, allora le
seguenti sono equivalenti:
(i) F è s.c.i.;
(ii) a è s.c.s. e b è s.c.i.
Dimostrazione. Dimostriamo solo che (ii) implica (i). Siano x ∈ X t.c. a(x) < b(x)
(per evitare casi banali) e A ⊂ R aperto t.c. F (x) ∩ A 6= ∅. Allora esiste y ∈ A t.c.
TEORIA DEI GIOCHI
9
a(x) < y < b(x). Poiché a è s.c.s. e b è s.c.i. abbiamo ay , by ∈ τ e x ∈ ay ∩ by . Dunque
esiste U ∈ U(x) t.c. U ⊆ ay ∩ by . Abbiamo infine y ∈ F (z) per ogni z ∈ U .
Analogamente:
Lemma 2.8. Se (X, τ ) è uno spazio topologico, a, b : X → R sono funzioni t.c. a(x) 6 b(x)
per ogni x ∈ X e F : X → 2R è definita da F (x) = [a(x), b(x)] per ogni x ∈ X, allora le
seguenti sono equivalenti:
(i) F è s.c.s.;
(ii) a è s.c.i. e b è s.c.s.
Alcuni esempi illustrano le differenze tra le varie nozioni di contenutià:
Esempio 2.9. La multifunzione F : R → 2R definita da
{0} se x < 0
F (x) = [0, 1] se x = 0
{1} se x > 0.
è s.c.s. ma non s.c.i.
Esempio 2.10. La multifunzione F : R → 2R definita da
[0, 1] se x < 0
F (x) = {1/2} se x = 0
[0, 1] se x > 0.
è s.c.i. ma non s.c.s.
Esempio 2.11. Sia g : R → R convessa. È definito per ogni x ∈ R il sub-differenziale
∂g(x) = {y ∈ R : y(v − x) 6 g(v) − g(x) per ogni v ∈ R}.
La multifunzione ∂g : R → 2R è s.c.s.
La semi-continuità è a nozione più debole:
Lemma 2.12. Se (X, τX ), (Y, τY ) sono spazi topologici, F : X → 2Y è s.c.i. o s.c.s. e
dom(F ) = X, allora F è semi-continua.
La semi-continuità superiore è legata alla chiusura e alla compattezza degli insiemi.
Lemma 2.13. Se (X, τX ) è uno spazio topologico, (Y, τY ) è uno spazio normale, F : X → 2Y
è s.c.s. a valori chiusi, allora gr(F ) ⊆ X × Y è chiuso.
Dimostrazione. Proviamo che A = (X × Y ) \ gr(F ) è aperto. Per ogni (x, y) ∈ A, esistono
V, W ∈ τY t.c. y ∈ V , F (x) ⊆ W e V ∩ W = ∅. Poiché F è s.c.s. esiste U ∈ UX (x) t.c.
F (U ) ⊆ W . Dunque U × V ∈ U(x, y) e U × V ⊆ A.
L’implicazione non si inverte, fuorché in casi particolari:
Lemma 2.14. Se (X, τX ) è uno spazio topologico, (Y, τY ) è uno spazio compatto e F : X →
2Y ha grafico chiuso, allora F è s.c.s.
10
A. IANNIZZOTTO
Estensione del Teorema di Weierstraß:
Teorema 2.15. Se (X, τX ) è uno spazio compatto, (Y, τY ) uno spazio topologico, F : X →
2X s.c.s. a valori compatti, allora F (X) è compatto.
Dimostrazione. Sia (Ai )i∈I una famiglia di aperti in Y t.c. F (X) ⊆ ∪i∈I Ai . Per ogni x ∈ X
esiste Jx ⊆ I finito t.c. F (x) ⊆ ∪i∈Jx Ai . Posto J = ∪x∈X Jx , la famiglia (F + (Ai ))i∈J è
un ricoprimento aperto di X, dunque esiste H ⊆ J finito t.c. X = ∪i∈H F + (Ai ), da cui
F (X) ⊆ ∪i∈H Ai . Perciò, F (X) è compatto.
Soffermiamoci sul caso particolare delle multifunzioni fra spazi metrici:
Definizione 2.16. Siano (X, dX ), (Y, dY ) spazi metrici, dYH denoti la distanza di Hausdorff
su Y , F : X → 2Y : F è lipschitziana se esiste L > 0 t.c.
dYH (F (x), F (z)) 6 LdX (x, z) per ogni x, z ∈ X.
Se L = 1, F è detta non-espansiva. Se L < 1, F è detta contrazione multivoca.
Lemma 2.17. Se (X, dX ), (Y, dY ) sono spazi metrici e F : X → 2Y è lipschitziana, allora
F è s.c.i.
Dimostrazione. Siano L > 0 una costante di Lipschitz per F , A ⊆ Y aperto, x ∈ F − (A).
Esistono y ∈ F (x) ∩ A e r > 0 t.c. BrY (y) ⊆ A. Dunque, posto δ = r/L, per ogni z ∈ BδX (x)
ho
dYH (F (z), F (x)) 6 LdX (x, z) < r,
da cui dY (y, F (z)) < r, che implica F (z) ∩ A 6= ∅. Pertanto, BδX (x) ⊆ F − (A) e F risulta
s.c.i. (Lemma 2.5).
Estensione del Teorema di Darboux:
Teorema 2.18. Se (X, τX ) è uno spazio connesso, (Y, τY ) uno spazio topologico, F : X → 2X
semi-continua a valori non vuoti e connessi, allora F (X) è connesso.
Dimostrazione. Procediamo per assurdo: siano A, B ∈ τY t.c. F (X) ⊆ A∪B, F (X)∩A 6= ∅,
F (X) ∩ B 6= ∅ e F (X) ∩ A ∩ B = ∅. Gli insiemi F − (A), F − (B) sono non vuoti e aperti
in X: infatti, per ogni x ∈ F − (A) si ha in effetti F (x) ⊆ A, quindi esiste U ∈ UX (x) t.c.
F (z) ⊆ A per ogni z ∈ U , da cui U ⊆ F − (A) (similmente si prova che F − (B) è aperto).
Inoltre F − (A) ∪ F − (B) = X, F − (A) ∩ F − (B) = ∅, contro l’ipotesi che X è connesso. In vista delle applicazioni, definiamo il prodotto cartesiano di multifunzioni:
Definizione 2.19. Siano X, Y , Z insiemi non vuoti, F : X → 2Y , G : X → 2Z : il prodotto
cartesiano di F e G è la multifunzione F × G : X → 2Y ×Z definita per ogni x ∈ X da
(F × G)(x) = F (x) × G(x).
Lemma 2.20. Se (X, τX ), (Y, τY ), (Z, τZ ) sono spazi topologici e F : X → 2Y , G : X → 2Z ,
allora:
(i) se F , G sono s.c.i., F × G è s.c.i.;
(ii) se F , G sono s.c.s. a valori compatti, F × G è s.c.s.;
TEORIA DEI GIOCHI
11
(iii) se F , G sono semi-continue a valori compatti, F × G è semi-continua.
Dimostrazione. Dimostriamo solo (i): siano (Ai )i∈I , (Bi )i∈I sottofamiglie di τY , τZ rispettivamente. Si ha
(F × G)− (∪i∈I Ai × Bi ) = ∪i∈I F − (Ai ) ∩ G− (Bi ) ,
e il secondo insieme è aperto. Dalla Definizione 2.19 segue che F × G è s.c.i.
Una funzione (univoca) continua, definita su un connesso, ha grafico connesso. Questo principio si estende alle multifunzioni, e inaugura una serie di risultati che legano multifunzioni
e connessione:
Teorema 2.21. Se (X, τX ) è uno spazio connesso, (Y, τY ) uno spazio topologico, F : X → 2Y
s.c.i. a valori non vuoti e connessi, allora gr(F ) è connesso.
Dimostrazione. Segue dal Lemma 2.20 e dal Teorema 2.18, una volta osservato che gr(F ) =
(idX × F )(X).
Un’applicazione:
Lemma 2.22. Se (X, τX ), (Y, τY ) sono spazi topologici, S ⊆ X × Y e una delle seguenti
condizioni è verificata:
(i) X è connesso, Sx 6= ∅ è connesso per ogni x ∈ X, S y è aperto per ogni y ∈ Y ;
(ii) Y è connesso, S y 6= ∅ è connesso per ogni y ∈ Y , Sx è aperto per ogni x ∈ X,
allora S è connesso.
Dimostrazione. Sia verificata (i): definiamo F : X → 2Y ponendo F (x) = Sx per ogni
x ∈ X. Allora F ha valori non vuoti e connessi. Inoltre, per ogni A ∈ τY l’insieme
F − (A) = {x ∈ X : (x, y) ∈ S per qualche y ∈ A} = ∪y∈A S y ,
è aperto, quindi F è s.c.i. La tesi segue dalla Proposizione 2.21, poiché gr(F ) = S.
Un lemma di stabilità che sarà utile in seguito:
Lemma 2.23. Se (X, τ ) è uno spazio topologico, (Y, d) uno spazio metrico, F, G : X → 2Y
s.c.i. a valori non vuoti, r ∈ R+
0 e
Br (G(x)) = {y ∈ Y : d(y, G(x)) < r} per ogni x ∈ X,
allora la multifunzione H : X → 2Y definita da H(x) = F (x) ∩ Br (G(x)) per ogni x ∈ X è
s.c.i.
Dimostrazione. Sia A ⊆ Y aperto. L’insieme
à = {(y, z) ∈ Y × Y : y ∈ A, d(y, z) < r}
è aperto in Y × Y . Ho
(2.1)
H − (A) = (F × G)− (Ã).
Infatti, per ogni x ∈ H − (A) esiste y ∈ F (x) ∩ A t.c. d(y, G(x)) < r, quindi esiste z ∈ G(x)
t.c. d(y, z) < r. Allora (y, z) ∈ (F (x) × G(x)) ∩ Ã cosı̀ che x ∈ (F × G)− (Ã). E viceversa.
12
A. IANNIZZOTTO
Per la Proposizione 2.20, la multifunzione F × G è s.c.i., dunque (F × G)− (Ã) è aperto in
X (Proposizione 2.5). Da (2.1) segue la tesi.
2.2. Selezioni continue. Il legame tra analisi multivoca e univoca è dato dalla seguente
nozione:
Definizione 2.24. Siano X, Y insiemi non vuoti, F : X → 2Y , f : X → Y : f è una
selezione di F se f (x) ∈ F (x) per ogni x ∈ X.
Ovviamente ogni multifunzione a valori non vuoti ammette selezioni. Tuttavia, queste
possono in generale essere irregolari: la multifunzione dell’Esempio 2.9 non ha alcuna
selezione continua. Si deve a Michael [24–26] il principale risultato di esistenza di selezioni
continue per una multifunzione. Questo richiede alcune premesse topologiche:
Definizione 2.25. Sia (X, τ ) uno spazio di Hausdorff. Esso è detto paracompatto se ogni
ricoprimento aperto A di X ammette un raffinamento localmente finito, ovvero un altro
ricoprimento aperto B di X con le seguenti proprieà
(i) per ogni A ∈ A esiste B ∈ B t.c. B ⊆ A;
(ii) per ogni x ∈ X esistono U ∈ U(x), Bx ⊆ B finita t.c. U ∩B = ∅ per ogni B ∈ B \Bx .
Ogni spazio paracompatto è normale (T4 ). Ogni spazio metrico è paracompatto. Si ha
inoltre il seguente teorema (di partizione dell’unità):
Teorema 2.26. Se (X, τ ) è uno spazio normale e {Ai }i∈I è un ricoprimento aperto localmente finito di X, allora esistono una famiglia {ϕi }i∈I di funzioni continue ϕi : X → [0, 1]
e una famiglia {Ci }i∈I di chiusi t.c.
(i) Ci ⊆ Ai per ogni i ∈ I;
(ii) ϕ
Pi (x) = 0 per ogni x ∈ X \ Ci , i ∈ I;
(iii) i∈I ϕi (x) = 1 per ogni x ∈ X.
In particolare, se (X, τ ) è uno spazio paracompatto e (Ai )i∈I è un ricoprimento aperto di
X, allora esiste una partizione continua dell’unità (ϕi )i∈I subordinata ad (Ai )i∈I (su questa
parte, si veda Checcucci, Tognoli & Vesentini [9, p. 157 e p. 223]).
Un lemma preparatorio:
Lemma 2.27. Se (X, τ ) è uno spazio topologico paracompatto, (Y, k · k) uno spazio normato,
F : X → 2Y s.c.i. a valori non vuoti e convessi, allora per ogni ε > 0 esiste fε : X → Y
continua t.c.
d(fε (x), F (x)) < ε per ogni x ∈ X.
Dimostrazione. Per ogni y ∈ Y sia Ay = F − (Bε (y)). La famiglia (Ay )y∈Y è un ricoprimento
aperto di X, che ammette un raffinamento localmente finito (Ey )y∈Y (Definizione 2.25), cui
è subordinata una partizione continua dell’unità (ϕy )y∈Y (Teorema 2.26). Per ogni x ∈ X
poniamo
X
fε (x) =
ϕy (x)y.
y∈Y
TEORIA DEI GIOCHI
13
È definita una funzione fε : X → Y . Proviamo che fε è continua: per ogni x ∈ X esistono
U ∈ U(x), y1 , . . . yn ∈ Y t.c. U ∩ Ey = ∅ per ogni y ∈ Y \ {yi }ni=1 ; dunque, per ogni z ∈ U
abbiamo
n
X
fε (z) =
ϕyi (z)yi ,
i=1
dunque fε è continua in x. Proviamo infine la formula metrica: procedendo come sopra,
assumiamo che per ogni i ∈ {1, . . . n} sia ϕyi (x) > 0, da cui x ∈ Ayi ; pertanto esiste
wi ∈ F (x) t.c. kwi − yi k < ε; sia
n
X
w=
ϕyi (x)wi ,
i=1
allora (per convessità di F (x)) abbiamo w ∈ F (x) e anche
n
X
kfε (x) − wk 6
ϕyi (x)kwi − yi k < ε,
i=1
da cui d(fε (x), F (x)) < ε.
Il teorema di Michael:
Teorema 2.28. Se (X, τ ) è uno spazio topologico paracompatto, (Y, k · k) uno spazio di
Banach, F : X → 2Y s.c.i. a valori non vuoti, chiusi e convessi, allora F ammette una
selezione continua.
Dimostrazione. Costruiamo una successione (fn ) di funzioni fn : X → Y continue t.c. per
ogni x ∈ X, n ∈ N
1
1
(2.2)
d(fn (x), F (x)) < n , d(fn (x), fn+1 (x)) < n−1 .
2
2
Procediamo per induzione. Per n = 1, dalla Proposizione 2.27 segue l’esistenza di f1 : X → Y
continua t.c. d(f1 (x), F (x)) < 1/2 per ogni x ∈ X, n ∈ N. Fissato n ∈ N0 , se esistono
f1 , . . . fn verificanti (2.2), definiamo Fn : X → 2Y ponendo per ogni x ∈ X
Fn (x) = F (x) ∩ B1/2n (fn (x)),
cosı̀ che Fn è s.c.i. (Proposizione 2.23) e ha valori non vuoti (per (2.2)) e convessi. Per la
Proposizione 2.27 esiste fn+1 : X → Y continua t.c. per ogni x ∈ X
1
d(fn+1 (x), Fn (x)) < n+1 .
2
In particolare, per ogni x ∈ X esiste yx ∈ Fn (x) t.c. kfn+1 (x) − yx k < 1/2n+1 , da cui
1
1
1
kfn+1 (x) − fn (x)k 6 kfn+1 (x) − yx k + kyx − fn (x)k < n + n+1 < n−1 .
2
2
2
Dunque fn+1 verifica (2.2). La successione (fn ) è di Cauchy uniformemente in X: per
completezza di Y , si ha fn → f uniformemente in X per qualche f : X → Y continua, per
la quale si ha da (2.2)
d(f (x), F (x)) = 0 per ogni x ∈ X.
14
A. IANNIZZOTTO
Poiché F ha valori chiusi, f è una selezione continua di F .
Una conseguenza importante è il seguente teorema di estensione-selezione:
Teorema 2.29. Se (X, τ ) è uno spazio topologico paracompatto, (Y, k · k) uno spazio di
Banach, F : X → 2Y s.c.i. a valori non vuoti, chiusi e convessi, C ⊆ X chiuso, g : C → Y
continua t.c. g(x) ∈ F (x) per ogni x ∈ C, allora F ammette una selezione continua
f : X → Y t.c. f |C = g.
Dimostrazione. Sia F̃ : X → 2Y definita ponendo per ogni x ∈ X
(
{g(x)} se x ∈ C
F̃ (x) =
F (x)
se x ∈
/ C.
Proviamo che F̃ è s.c.i. Per ogni A ⊆ Y aperto e ogni x ∈ F̃ − (A), possono darsi due casi:
(a) se x ∈ C, allora g(x) ∈ A, quindi esiste U ∈ U(x) t.c. g(z) ∈ A per ogni z ∈ U ∩ C;
inoltre F (x) ∩ A =
6 ∅, quindi esiste V ∈ U(x) t.c. F (z) ∩ A 6= ∅ per ogni x ∈ V ;
posto W = U ∩ V , abbiamo W ∈ U(x) e F̃ (z) ∩ A 6= ∅ per ogni z ∈ W ;
(b) se x ∈
/ C, esiste U ∈ U(x) t.c. F̃ (z) ∩ A = F (z) ∩ A 6= ∅ per ogni z ∈ U .
Inoltre, F̃ ha valori chiusi e convessi. Per il Teorema 2.28, F̃ ha una selezione continua
f : X → Y , e ovviamente f (x) = g(x) per ogni x ∈ C.
Di seguito presentiamo alcune applicazioni del Teorema 2.28. La prima è un teorema di
estensione continua per funzioni definite su insiemi chiusi (che generalizza, in un certo senso,
il Teorema di Tietze):
Corollario 2.30. Se (X, τ ) è uno spazio topologico paracompatto, (Y, k · k) è uno spazio
di Banach, C ⊂ X è non vuoto e chiuso, g : C → Y è continua, allora esiste f : X → Y
continua t.c. f (x) = g(x) per ogni x ∈ C.
Dimostrazione. Applichiamo il Teorema 2.29 alla multifunzione costante F (x) = Y per ogni
x ∈ X.
La seconda è un teorema di esistenza di un’inversa continua per operatori lineari continui
(che trova applicazione nella teoria delle equazioni differenziali lineari):
Corollario 2.31. Se (X, k·kX ), (Y, k·kY ) sono spazi di Banach e ϕ ∈ hom(Y, X) è continuo
e suriettivo, allora esiste f : X → Y continua t.c. ϕ ◦ f = idX .
Dimostrazione. Applichiamo il Teorema 2.29 alla multifunzione F = ϕ−1 , che ha valori non
vuoti, chiusi e convessi per le ipotesi su ϕ ed è s.c.i. perché ϕ è aperta (ved. Proposizione
2.5), come segue dal teorema della mappa aperta (si veda Rudin [33, p. 47]).
2.3. Punti fissi. Nella teoria dei punti fissi per applicazioni univoche, si distinguono due
famiglie di risultati: i teoremi ’metrici’ di punto fisso dovuti a Banach, Caccioppoli, e quelli
’algebrico-topologici’ dovuti a Brouwer, Schauder, Cauty (si veda Granas & Dugundji [16]).
Anche il caso multivoco rispecchia questa distinzione.
TEORIA DEI GIOCHI
15
Definizione 2.32. Siano X un insieme non vuoto, F : X → 2X , x ∈ X: x è un punto
fisso di F se x ∈ F (x). L’insieme dei punti fissi di F è denotato fix(F ).
Il teorema di Nadler estende il teorema di Banach & Caccioppoli rispetto all’esistenza di
punti fissi, ma si perde l’unicità:
Teorema 2.33. Se (X, d) è uno spazio metrico completo e F : X → 2X una contrazione
multivoca a valori chiusi, allora fix(F ) 6= ∅.
Dimostrazione. Siano L ∈ (0, 1) una costante di Lipschitz per F , β > 1 un numero reale
e x0 ∈ X. Scartando casi banali, supponiamo x0 ∈
/ F (x0 ), da cui d(x0 , F (x: 0)) > 0.
Costruiamo una successione (xn ) in X t.c.
(2.3)
xn ∈ F (xn−1 ), d(xn−1 , xn ) < βLn−1 d(x0 , F (x0 )) per ogni n ∈ N0 .
Procediamo per induzione. L’esistenza di x1 verificante (2.3) è ovvia. Sia n > 1 e siano
x0 , . . . xn ∈ X verificanti (2.33): in particolare,
d(xn , F (xn )) 6 dH (F (xn−1 ), F (xn )) 6 Ld(xn−1 , xn ) < βLn d(x0 , F (x0 )),
da cui segue l’esistenza di xn+1 ∈ F (xn ) verificante (2.3). Proviamo ora che (xn ) è una
successione di Cauchy in X: per ogni n, m ∈ N, n < m, ho
m
m
X
X
d(xm , xn ) 6
d(xi , xi−1 ) 6 βd(x0 , F (x0 ))
Li−1 ;
i=n+1
i=n+1
dal Criterio di Cauchy per le serie (e dalla convergenza della serie geometrica di ragione L)
segue che, per ogni ε > 0, esiste ν ∈ N t.c. se ν < n < m allora d(xm , xn ) < ε. Poiché X è
completo, abbiamo xn → x. Da (2.3) ho per ogni n ∈ N
d(xn , F (x)) 6 dH (F (xn−1 ), F (x)) 6 Ld(xn−1 , x),
da cui, passando al limite, d(x, F (x)) = 0. Poiché F (x) è chiuso, abbiamo infine x ∈
fix(F ).
Il primo, basilare risultato:
Teorema 2.34. Se (X, k · k) è uno spazio di Banach, K ⊂ X è compatto e convesso e
F : K → 2K è s.c.i. a valori non vuoti, chiusi e convessi, allora fix(F ) 6= ∅.
Dimostrazione. Per il Teorema 2.28, F ammette una selezione continua f : K → K. Per il
Teorema di Schauder [16, p. 119], esiste x ∈ K t.c. f (x) = x. Dunque x ∈ fix(F ).
Per studiare le multifunzioni s.c.s. occorre richiamare un lemma di approssimazione dovuto
a Cellina [7]:
Lemma 2.35. Se K, H ⊂ Rn (n ∈ N0 ) sono compatti, r > 0 e F : K → 2H è s.c.s. a
valori non vuoti, chiusi e convessi, allora esiste g : K → H continua t.c.
gr(g) ⊆ Br (gr(F )).
Il più noto teorema di punto fisso per le multifunzioni è il seguente, dovuto a Kakutani [19]:
16
A. IANNIZZOTTO
Teorema 2.36. Se K ⊆ Rn (n ∈ N0 ) è compatto e convesso e F : K → 2K è s.c.s. a valori
non vuoti, chiusi e convessi, allora fix(F ) 6= ∅.
Dimostrazione. Per ogni k ∈ N0 , dal Lemma 2.35 segue l’esistenza di gk : K → K continua
t.c. gr(gk ) ⊆ B1/k (gr(F )). Per il Teorema di Brouwer [16, p. 95] esiste xk ∈ fix(gk ). A meno
di estratte, abbiamo xk → x per qualche x ∈ K, da cui (xk , xk ) → (x, x), quindi
1
d((x, x), gr(F )) = lim d((xk , xk ), gr(F )) 6 lim = 0.
k
k k
Poiché gr(F ) è chiuso (Lemma 2.13), abbiamo infine x ∈ fix(F ).
Il Teorema 2.36 è stato esteso agli spazi vettoriali-topoligici da Glicksberg [15]:
Teorema 2.37. Se (X, τ ) è uno spazio vettoriale-topologico localmente convesso di Hausdorff,
K ⊂ X compatto e convesso, F : K → 2K a valori chiusi e convessi t.c. gr(F ) è chiuso,
allora fix(F ) 6= ∅.
Il seguente risultato dovuto a Browder [5] garantisce l’esistenza di punti fissi per una
multifunzione a fibre aperte:
Teorema 2.38. Se (X, τ ) è uno spazio vettoriale-topologico localmente convesso di Haudorff,
K ⊂ X è compatto e convesso, F : K → 2K a valori non vuoti e convessi t.c. F − (y) ∈ τ
per ogni y ∈ K, allora fix(F ) 6= ∅.
Dimostrazione. La famiglia (F − (y))y∈K è un ricoprimento aperto di K, che è compatto,
quindi esistono n ∈ N, y1 , . . . yn ∈ K t.c. K ⊂ ∪ni=1 F − (yi ). Per il Teorema 2.26 esistono
ϕ1 , . . . ϕn : K → [0, 1] continue t.c.
n
X
ϕi (x) = 1 per ogni x ∈ K
i=1
e per ogni i ∈ {1, . . . n} si ha ϕi (x) = 0 per ogni x ∈ K \ F − (yi ). Sia
f (x) =
n
X
ϕi (x)yi per ogni x ∈ K.
i=1
Poiché K è convesso, f : K → K, inoltre f è continua. Osserviamo che f è una selezione
di F : infatti, per ogni x ∈ K, posto Ix = {i ∈ {1, . . . n} : ϕi (x) 6= 0}, per ogni i ∈ Ix
otteniamo x ∈ F − (yi ), ovvero yi ∈ F (x), da cui per convessità di F (x)
X
f (x) =
ϕi (x)yi ∈ F (x).
i∈Ix
Sia C = conv(y1 , . . . yn ), Y = span(y1 , . . . yn ). Chiaramente dim(Y ) < ∞, dunque Y è
isomorfo a uno spazio euclideo, inoltre f (C) ⊆ C. Possiamo dunque applicare il teorema di
Brouwer [16, p. 95] a f |C , trovando x ∈ C ∩ fix(f ). Ne segue x ∈ fix(F ).
In uno spazio di Banach di dimensione infinita, tutti questi teoremi di punto fisso hanno
applicazioni limitate per l’estrema ’rarità’ dei compatti in tali spazi. Si ricorre dunque ai
punti fissi approssimati (si veda Brânzei et Al. [4]).
TEORIA DEI GIOCHI
17
Definizione 2.39. Siano (X, d) uno spazio metrico, F : X → 2X , ε > 0 un numero reale,
x ∈ X: x è detto ε-punto fisso di F se d(x, F (x)) < ε. L’insieme degli ε-punti fissi di F è
denotato fixε (F ).
Vale in merito il seguente risultato:
Teorema 2.40. Se (X, k · k) è uno spazio di Banach riflessivo, S ⊆ X limitato, convesso
t.c. int(S) 6= ∅, F : S → 2S a valori non vuoti e convessi, t.c. gr(F ) è debolmente chiuso,
allora per ogni ε > 0 si ha fixε (F ) 6= ∅.
Dimostrazione. L’ultima ipotesi significa che gr(F ) è chiuso rispetto alla topologia prodotto
della topologia σ(X ∗ , X) per se stessa, relativizzata a S × S (leggere due volte aiuta).
Supponiamo S = B1 (0) (il caso generale si tratta con aggiustamenti minori). Fissato ε > 0,
trovo δ ∈ R t.c. 0 < δ < min{1, ε} e poniamo K = (1 − δ)cl(S) = B 1−δ (0), e per ogni
x∈K
G(x) = (1 − δ)cl(F (x)).
Dunque, K è un insieme chiuso, convesso, limitato in X, quindi debolmente compatto (si
veda Fabian et Al. [11]) e G : K → 2K ha valori convessi e grafico debolmente chiuso.
Per il Teorema 2.37 esiste x ∈ fix(G), ovvero esiste y ∈ F (x) t.c. x = (1 − δ)y, da cui
d(x, F (x)) 6 kx − yk = δkxk < ε.
In conclusione x ∈ fixε (F ).
2.4. Il principio KKM. Concludiamo questa sezione con un celebre risultato di Knaster,
Kuratowski & Mazurkiewicz [18], in base al quale la famiglia dei valori di una
multifunzione (soggetta a una peculiare ipotesi geometrica) ha la proprietà dell’intersezione
finita (si veda anche [16, p. 37]).
Definizione 2.41. Siano X uno spazio vettoriale, S ⊂ X non vuoto, F : S → 2S : F
soddisfa KKM se, per ogni n ∈ N, x1 , . . . xn ∈ S, si ha
conv(x1 , . . . xn ) ⊆ ∪ni=1 F (xi ).
Chiaramente, se F soddisfa KKM, allora fix(F ) = S. Inoltre, l’unione di due valori F (x1 )
e F (x2 ) contiene il segmento congiungente x1 e x2 , e cosı̀ via.
Teorema 2.42. Se X è uno spazio vettoriale, S ⊂ X è non vuoto, F : S → 2X soddisfa
KKM e F (x) è finitamente chiuso1 per ogni x ∈ S, allora per ogni n ∈ N0 , x1 , . . . xn ∈ S
si ha
∩ni=1 F (xi ) 6= ∅.
Dimostrazione. Procediamo per assurdo: sia dunque
(2.4)
1In
∩ni=1 F (xi ) = ∅.
uno spazio vettoriale X, si dice che S ⊆ X è finitamente chiuso se, per ogni sottospazio Y di X di
dimensione finita, l’insieme S ∩ Y è chiuso in Y (rispetto alla topologia euclidea.
18
A. IANNIZZOTTO
Denotiamo X̃ = span(x1 , . . . xn ), C = conv(x1 , . . . xn ). Su X̃ definiamo una topologia
vettoriale di Hausdorff, rendendo X̃ omeomorfo a uno spazio euclideo: in tale spazio, C è
chiuso e limitato, quindi compatto. Per ogni i ∈ {1, . . . n} definiamo λi : X̃ → R ponendo
λi (x) = d(x, F (xi ) ∩ X̃) per ogni x ∈ X̃.
La funzione λi è continua. Per ogni x ∈ X̃ esiste i ∈ {1, . . . n} t.c. λi (x) > 0: altrimenti,
infatti, si avrebbe x ∈ ∩ni=1 F (xi ) (rammentiamo che gli insiemi F (xi ) ∩ X̃ sono chiusi),
contro (2.4). Dunque, per ogni x ∈ X̃ è definito un insieme non vuoto
Ix = {i ∈ {1, . . . n} : λi (x) > 0}.
Definiamo f : X̃ → X̃ ponendo
f (x) =
n
X
i=1
λ (x)
Pn i
xi per ogni x ∈ X̃.
j=1 λj (x)
La funzione f è continua e si ha f (x) ∈ C per ogni x ∈ X̃. Dunque, per il teorema di
Brouwer [16, p. 95], esiste x0 ∈ fix(f |C ). Applicando la condizione KKM otteniamo
x0 = f (x0 ) ∈ conv ({xi : i ∈ Ix0 }) ⊆ ∪i∈Ix0 F (xi ),
cosı̀ che esiste i ∈ Ix0 t.c. x0 ∈ F (xi ), da cui λi (x0 ) = 0, contro la definizione di λi . Questo
conclude la dimostrazione.
Come conseguenza, si può provare che esiste un punto comune a tutti i valori di una
multifunzione:
Corollario 2.43. Se (X, τ ) è uno spazio vettoriale-topologico di Hausdorff, S ⊆ X è non
vuoto, F : S → 2X soddisfa KKM e ha valori chiusi, ed esiste x0 ∈ S t.c. F (x0 ) è compatto,
allora
∩x∈S F (x) 6= ∅.
Dimostrazione. Si vede facilmente che F (x) è finitamente chiuso per ogni x ∈ S. Sia
F̃ : S → 2F (x0 ) definita ponendo per ogni x ∈ S
F̃ (x) = F (x) ∩ F (x0 ).
Per il Teorema 2.42, dom(F̃ ) = S. Per ogni n ∈ N, x1 , . . . xn ∈ S si ha
∩ni=1 F̃ (xi ) = ∩ni=0 F (xi ) 6= ∅,
dunque (F̃ (x))x∈S è una famiglia di sottoinsiemi chiusi del compatto F (x0 ) soddisfacente
la proprietà dell’intersezione finita. Dunque esiste x ∈ ∩x∈S F̃ (x) (si veda [9, p. 135]), in
particolare x ∈ ∩x∈S F (x).
TEORIA DEI GIOCHI
19
3. Giochi non cooperativi ed equilibri di Nash
Ciascuno deve impostare la propria strategia di vita sul presupposto dell’ostilità altrui.
E. Limonov
In questa sezione riprendiamo il concetto di equilibrio di Nash: usando gli strumenti
matematici introdotti nelle sezioni precedenti, dimostreremo l’esistenza di (almeno) un
equilibrio di Nash per un gioco statico non cooperativo deterministico con due giocatori,
rappresentato in forma strategica da Γ = (X, Y, f, g) (alcune nozioni qui introdotte si
possono estendere al caso di più giocatori). Per approfondimenti rimandiamo ai testi di
Aubin [1], Colombo [10] e Gibbons [14].
Specializziamo la Definizione 1.12:
Definizione 3.1. Un equilibrio (di Nash) per Γ è una coppia (x, y) ∈ X × Y t.c.
(i) f (x, y) = sup f (·, y);
X
(ii) g(x, y) = sup g(x, ·).
Y
L’insieme degli equilibri per Γ si denota Ne(Γ).
Una nozione collegata a quella di equilibrio è la seguente:
Definizione 3.2. Nel gioco Γ = (X, Y, f, g), la coppia (x, y) ∈ X × Y è un ottimo (di
Pareto) se non esiste un’altra coppia (x, y) ∈ X × Y verificante una delle seguenti condizioni:
(i) f (x, y) > f (x, y), g(x, y) > g(x, y);
(ii) f (x, y) > f (x, y), g(x, y) > g(x, y).
L’insieme degli ottimi per Γ si denota Po(Γ).
Queste due nozioni sono indipendenti, come dimostra il più celebre problema della teoria
dei giochi, noto come dilemma del prigioniero:
Esempio 3.3. Due individui vengono arrestati con l’accusa di omicidio e richiusi in celle
separate. Il commissario fa a ogni prigioniero la seguente proposta: ’Se confessi (accusando
il tuo complice) vi incriminerò entrambi e sarete condannati a 10 anni di prigione, ma tu
sarai liberato per aver collaborato; se confessate entrambi avrete uno sconto di pena e sarete
liberi in 5 anni; se nessuno di voi confessa, resterete in galera solo per il tempo del processo,
cioè 1 anno.’ Ogni prigioniero sa che la stessa offerta è stata fatta anche all’altro, e deve
decidere cercando di ridurre al minimo gli anni che deve passare in cella. Denotati P , Q
i prigionieri, X = Y = {c, t} le strategie (confessare e tacere) ed eguagliati i pay-off agli
opposti delle durate delle condanne, si ottiene la seguente tabella:
P \Q c
t
c
(−5, −5) (0, −10)
t
(−10, 0) (−1, −1)
Si vede che Ne(Γ) = {(c, c)}, mentre Po(Γ) = {(t, t)}. Non potendo comunicare, i due
prigionieri sceglieranno di confessare, raggiungendo cosı̀ un equilibrio inefficiente. Questo
20
A. IANNIZZOTTO
esito è tipico dei giochi non cooperativi, nei quali la competizione esasperata preclude la
possibilità di accordi.
Un equilibrio è, di solito, la miglior soluzione raggiungibile nei giochi non cooperativi. Si
pone pertanto il problema di individuare condizioni sufficienti per l’esistenza di (almeno) un
equilibrio. Per ottenere questo risultato occorre estendere il concetto di strategia utilizzato
nella Sezione , introducendo il concetto di tipo probabilistico di strategia mista.
3.1. Strategie miste e teorema di Nash. Richiamiamo un’elementare nozione dal calcolo
delle probabilità (si veda Scozzafava [34]):
Definizione 3.4. Sia X = {x1 , . . . xn } un insieme finito (n ∈ N0 , xi 6= xj per ogni i 6= j):
una distribuzione di probabilità su X è una funzione p : X → [0, 1] t.c.
n
X
p(xi ) = 1.
i=1
Le strategie miste si possono rappresentare geometricamente: sia ϕ : X → Rn definita da
ϕ(xi ) = ei per ogni i ∈ {1, . . . n} (in particolare, ϕ è iniettiva). Sia Π(X) l’insieme di tutte
le distribuzioni di probabilità su X, e sia ϕ̃ : Π(X) → Rn definita da
ϕ̃(p) =
n
X
p(xi )ϕ(xi ) per ogni p ∈ Π(X).
i=1
Chiaramente si ha ϕ̃(Π(X)) = conv(ϕ(X)), ovvero ϕ̃(Π(X)) è il simplesso (n − 1)dimensionale di vertici e1 , . . . en (in particolare, esso è un insieme compatto e convesso), e ϕ̃
è un isomorfismo tra Π(X) (con le operazioni formali) e ϕ̃(Π(X)). Identificando, per ogni
i ∈ {1, . . . n}, xi con la distribuzione p ∈ Π(X) definita da p(xj ) = δi,j per ogni j ∈ {1, . . . n},
possiamo considerare ϕ̃ come un’estensione di ϕ (unica a meno di isomorfismi).
Osservazione 3.5. La Definizione 3.4 si può estendere al caso in cui X è infinito: allora
una distribuzione di probabilità su X è una misura p su X, t.c. p(X) = 1. Per chiarire: se
X rappresenta l’insieme dei possibili esiti di un evento aleatorio (ad esempio una corsa di
cavalli), la funzione p associa a ogni esito (rappresentato da un elemento o da un sottoinsieme
di X) la somma che uno scommettitore punta su tale esito con la prospettiva di vincere 1 se
il pronostico si rivela esatto.
Introduciamo la seguente nozione:
Definizione 3.6. Nel gioco Γ, una strategia mista per il giocatore P (Q) è una distribuzione
di probablilità sull’insieme delle strategie X (Y ). Gli elementi di X (Y ) sono detti strategie
pure.
L’impiego di strategie miste corrisponde al seguente schema: P è visto come uno speculatore
che dispone di un capitale pari a 1, da investire in un insieme X di attività; scegliere
una strategia mista p equivale allora a investire la somma p(xi ) nell’attività xi , per ogni
i ∈ {1, . . . n} (si può formulare lo stesso concetto utilizzando lo schema delle scommesse). Si è
visto come l’insieme Π(X) si può identificare con un sottoinsieme convesso e compatto di uno
TEORIA DEI GIOCHI
21
spazio euclideo: è quindi ragionevole ipotizzare, come faremo in seguito, che l’insieme delle
strategie (miste) di ciascun giocatore goda di queste proprietà geometriche e topologiche.
Esempio 3.7. Nel gioco considerato nell’Esempio 1.6, esteso alle strategie miste, si pone
X = Y = [0, 1]: per ogni (x, y) ∈ [0, 1]2 (che rappresenta la valutazione da parte di P
che l’evento p abbia probabilità x e d invece probabilità (1 − x), mentre Q attribuisce a p
probabilità y e a d probabilità (1 − y)) i pay-off dei due giocatori sono rispettivamente
f (x, y) = xy − x(1 − y) − (1 − x)y + (1 − x)(1 − y) = 4xy − 2x − 2y + 1,
g(x, y) = −xy + x(1 − y) + (1 − x)y − (1 − x)(1 − y) = −4xy + 2x + 2y − 1
(si noti che f (x, y) = −g(x, y)).
Per determinare gli equilibri di un gioco Γ si fa uso delle multifunzioni di miglior risposta
per i singoli giocatori e globale, RP : Y → 2X , RQ : X → 2Y , R : X × Y → 2X×Y , definite
per ogni (x, y) ∈ X × Y da
n
o
RP (y) = x ∈ X : f (x, y) = sup f (·, y) ,
X
n
o
RQ (x) = y ∈ Y : g(x, y) = sup g(x, ·) ,
Y
R(x, y) = RP (y) × RQ (x).
Le multifunzioni ora introdotte permettono di rappresentare gli equilibri di Γ:
Lemma 3.8. Si ha Ne(Γ) = fix(R).
Dimostrazione. Sia (x, y) ∈ Ne(Γ), allora per la Definizione 3.1
f (x, y) = sup f (·, y), g(x, y) = sup g(x, ·),
X
da cui (x, y) ∈ R(x, y). E viceversa.
Y
Il seguente teorema di esistenza di un equilibrio è il più celebre risultato della teoria dei
giochi, ed è dovuto a Nash [29]:
Teorema 3.9. Se X ⊂ Rn , Y ⊂ Rm (n, m ∈ N0 ) sono convessi e compatti, f, g : X ×Y → R
sono continue e
(i) f (·, y) è quasi-concava2 per ogni y ∈ Y ;
(ii) g(x, ·) è quasi-concava per ogni x ∈ X,
allora Ne(Γ) 6= ∅.
Dimostrazione. Adottiamo su X e su Y le rispettive topologie euclidee, e su X × Y la
topologia prodotto. Intendiamo applicare alla multifunzione R : X × Y → 2X×Y il Teorema
2.36.
2Se
X è un insieme convesso in uno spazio vettoriale e f : X → R, allora f è detta quasi-concava (risp.
c
quasi-convessa se f c (risp. f ) è convesso per ogni c ∈ R.
22
A. IANNIZZOTTO
La multifunzione RP : Y → 2X ha valori non vuoti, chiusi e convessi. Infatti, per ogni
y ∈ Y , la f (·, y) : X → R è continua su un compatto, quindi Teorema di Weierstraß esiste
x ∈ X t.c.
f (x, y) = sup f (·, y) = c,
X
da cui x ∈ RP (y); inoltre l’insieme RP (y) = f (·, y)c è chiuso e convesso per (i) (in effetti,
RP (y) è compatto perché X è compatto).
Proviamo ora che gr(RP ) è chiuso in Y × X, procedendo per assurdo: sia (yn , xn ) ∈ gr(RP )
per ogni n ∈ N e (yn , xn ) → (y, x), ma (y, x) ∈
/ gr(RP ). Allora f (x, y) < supX f (·, y). Sia
ε ∈ R t.c.
0 < ε < sup f (·, y) − f (x, y).
X
Esiste x̃ ∈ X t.c.
f (x̃, y) > f (x, y) + ε.
per continuità di f per n ∈ N abbastanza grande abbiamo
ε
|f (xn , yn ) − f (x, y)| < ,
3
ε
|f (x̃, yn ) − f (x̃, y)| < .
3
Usando le precedenti diseguaglianze, per n ∈ N abbastanza grande otteniamo
f (xn , yn ) < f (x, y) +
ε
2ε
< f (x̃, y) −
< f (x̃, yn ),
3
3
contro l’ipotesi che xn ∈ RP (yn ). Pertanto gr(RP ) è chiuso, quindi RP è s.c.s. (Lemma
2.14).
Similmente si prova che RQ : X → 2Y è s.c.s. a valori non vuoti, compatti e convessi.
Ne segue che R : X × Y → 2X×Y è s.c.s. (Lemma 2.20) a valori non vuoti, compatti e
convessi. Sono pertanto soddisfatte le ipotesi del Teorema 2.36, da cui segue che fix(R) 6= ∅.
Per il Lemma 3.8 ho Ne(Γ) 6= ∅.
Osservazione 3.10. Usando un’attrezzatura matematica più sofisticata, è possibile provare
versioni generalizzate del Teorema 3.9 (per esempio, in cui X e Y sono sottoinsiemi compatti
e convessi di uno spazio di Banach di dimensione infinita).
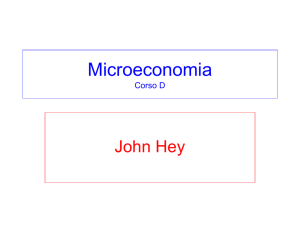
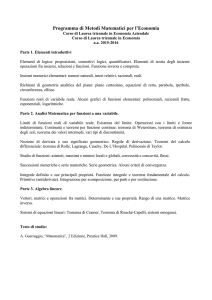
Oltre al risultato di esistenza, il metodo sopra illustrato fornisce un algoritmo per individuare
gli equilibri, che descriviamo limitandoci al caso semplice in cui X = Y = [0, 1]. I grafici
delle multifunzioni RP e RQ si possono rappresentare come curve inscritte nel quadrato
[0, 1] × [0, 1] (in generale, queste curve potranno contenere tratti verticali). Si ha allora, per
il Lemma 3.8,
(3.1)
Ne(Γ) = gr(RP ) ∩ gr(RQ ).
Nella Fig. 1, questi punti sono (0, 0) e (1, 1).
TEORIA DEI GIOCHI
23
Figura 1. Il metodo dell’intersezione.
3.2. Esempi. In questa sezione presentiamo alcuni esempi e applicazioni: alcuni di questi
sono veri ’giochi’ o esercizi matematici, altri sono modelli realmente usati nelle scienze
sociali. Tutti possono essere risolti utilizzando il Teorema 3.9 per provare l’esistenza degli
equilibri, e la formula (3.1) per determinarli esplicitamente.
Esempio 3.11. Nel gioco della battaglia dei sessi, come abbiamo visto nell’Esempio 1.13,
(s, s) e (t, t) sono equilibri di Nash. Passando dalle strategie pure a quelle miste, definiamo
X = Y = [0, 1] e f, g : [0, 1]2 → R ponendo per ogni (x, y) ∈ [0, 1]
f (x, y) = 10xy + 0x(1 − y) + 0(1 − x)y + 5(1 − x)(1 − y) = 15xy − 5x − 5y + 5
(si può pensare a x e a (1 − x) come al tempo passato allo stadio e a teatro, rispettivamente,
da P ). Analogamente, per ogni (x, y) ∈ [0, 1] abbiamo
g(x, y) = 15xy − 10x − 10y + 10.
Il Teorema 3.9 garantisce l’esistenza di almeno un equilibrio. In effetti, ve ne sono tre.
Semplici calcoli forniscono le multifunzioni di miglior risposta:
{0} se y ∈ [0, 1/3)
RP (y) = [0, 1] se y = 1/3
,
{1} se y ∈ (1/3, 1]
{0} se x ∈ [0, 2/3)
RQ (x) = [0, 1] se x = 2/3
.
{1} se x ∈ (2/3, 1]
Gli equilibri si ottengono mediante (3.1):
2 1
Ne(Γ) = (0, 0),
,
, (1, 1) (due di essi corrispondono a strategie pure).
3 3
Osserviamo che gli equilibri in strategie miste dipendono dai valori dei pay-off, mentre quelli
in strategie pure solo dalle preferenze (Definizione 1.2).
24
A. IANNIZZOTTO
Esempio 3.12. Nel gioco noto come caccia al cinghiale, due cacciatori P , Q devono scegliere
se andare a caccia di cinghiale o di lepri (X = Y = {c, l}), sapendo che per catturare un
cinghiale bisogna essere in due, mentre per catturare molte lepri è meglio separarsi. Si ha la
seguente tabella dei pay-off:
P \Q c
l
c
(10, 10) (0, 8)
l
(8, 0)
(4, 4)
Si ha Ne(Γ) = {(c, c), (l, l)} ma Po(Γ) = {(c, c)}. Passando alle strategie miste si trova un
terzo equilibrio (2/3, 2/3).
Esempio 3.13. Nel gioco dei fumatori, due fumatori P , Q si trovano in una piccola stanza:
entrambi hanno voglia di fumare, ma sono infastiditi dall’aria viziata, pertanto ognuno dei
due vorrebbe fumare da solo, ma preferisce comunque fumare insieme all’altro piuttosto che
astenersi. Si ha la seguente tabella dei pay-off:
P \Q f
n
f
(1, 1) (2, 0)
n
(0, 2) (0, 0)
Studiamo Γ direttamente in strategie miste: poniamoo X = Y = [0, 1] e ricaviamo
f (x, y) = 2x − xy, g(x, y) = 2y − xy per ogni (x, y) ∈ [0, 1]2 .
Ne segue che RP (y) = RQ (x) = {1} per ogni (x, y) ∈ [0, 1]2 , cosı̀ che Ne(Γ) = {(1, 1)},
ovvero P e Q scelgono entrambi di fumare. Si noti che Po(Γ) = ∅. Questo gioco è un caso
particolare del cosiddetto paradosso liberale, secondo il quale in assenza di divieti ognuno
tende a fare come gli pare senza curarsi del bene comune.
Esempio 3.14. Nel gioco del pollo, reso celebre dal film ’Rebel without a cause’ di Nicholas
Ray (1955), due personaggi P , Q si sfidano a correre in macchina verso un burrone: perde
chi sterza per primo. Ogni giocatore dispone di due strategie, sterzare (s) e tirare dritto (d);
i pay-off sono, rispettivamente, 10 per la vittoria, 5 per il pareggio, 1 per la sconfitta e 0 per
la morte:
P \Q s
d
s
(5, 5) (1, 10)
d
(10, 1) (0, 0)
Come si vede, Ne(Γ) = {(s, d), (d, s)} e Po(Γ) = ∅. Passando alle strategie miste si trova
un altro equilibrio, (1/6, 1/6). Questo gioco è un utile schema delle competizioni in cui la
deterrenza riveste un ruolo importante (per esempio, la corsa agli armamenti).
Esempio 3.15. Nel gioco dei ragni, due ragni P e Q (di una specie che produce parecchie
uova ma poche ragnatele) competono per il possesso di una ragnatela: ciascun ragno può
lottare (l) o arrendersi (a); se entrambi lottano, i pay-off assegnati (che rappresentano le
propensioni dei ragni a lottare) sono p, q > 0, in generale la situazione è descritta dalla
TEORIA DEI GIOCHI
25
tabella
P \Q l
a
l
(p, q) (10, 0)
a
(0, 10) (5, 5)
Gli equilibri dipendono dai valori dei parametri:
• se p, q > 0 si ha Ne(Γ) = {(l, l)};
• se p > 0 = q si ha Ne(Γ) = {(l, l), (l, a)};
• se p = 0 < q si ha Ne(Γ) = {(l, l), (a, l)};
• se p = q = 0 si ha Ne(Γ) = {(l, l), (l, a), (a, l)}.
Esempio 3.16. Nel gioco dei candidati, le proposte programmatiche in vista di un’elezione
sono rappresentate dai numeri reali compresi tra 0 (estrema sinistra) e 1 (estrema destra)
e si suppone che gli elettori siano uniformemente distribuiti lungo questo intervallo e
scelgano il candidato col programma più vicino alle loro idee: due candidati P e Q devono
formulare i loro programmi, col vincolo che quello di P si collochi ’più a sinistra’ di quello
di Q, e ovviamente puntano entrambi a ottenere la maggioranza dei voti. Il gioco Γ, non
rappresentabile in una tabella, presenta X = Y = [0, 1] e le multifunzioni di miglior risposta
n
1o
x+y
>
= [1 − y, 1],
RP (y) = x ∈ [0, 1] :
2
2
n
x+y
1o
RQ (x) = y ∈ [0, 1] :
6
= [0, 1 − x].
2
2
Si ottiene
Ne(Γ) = (x, 1 − x) : x ∈ [0, 1]
(in questo caso RP , RQ hanno infiniti valori non degeneri).
Esempio 3.17. Riprendiamo il gioco considerato nell’Esempio 3.16, ambientandolo in un
Paese di orientamento politico non neutrale: sia ϕ : [0, 1] → [0, 1] la densità con cui gli
elettori si distribuiscono da ’sinistra’ a ’destra’, supponiamo ϕ continua e poniamo
Z t
Φ(t) =
ϕ(τ )dτ per ogni t ∈ [0, 1],
0
chiaramente sotto il vincolo Φ(1) = 1. In questo caso, le funzioni di miglior risposta sono
n
x + y 1o
RP (y) = x ∈ [0, 1] : Φ
>
,
2
2
n
x + y 1o
RQ (x) = y ∈ [0, 1] : Φ
6
.
2
2
In particolare, se ϕ(t) = 2t per ogni t ∈ [0, 1] (cioè se l’elettorato è prevalentemente
conservatore), si ha
(
√
∅
se y ∈ [0, 2 − 1)
√
RP (y) = √
2 − y, 1 se y ∈ [ 2 − 1, 1],
(
√
[0, 1]
se x ∈ [0, 2 − 1)
√
RQ (x) = √
.
0, 2 − x se x ∈ [ 2 − 1, 1].
26
A. IANNIZZOTTO
Dunque,
√
√
Ne(Γ) = (x, 2 − x) : x ∈ [ 2 − 1, 1] .
Si può concludere che al candidato di sinistra non conviene adottare posizioni estreme.
Esempio 3.18. Il duopolio di Cournot è un classico modello economico: due produttori P
e Q si contendono l’intero mercato di un bene: i dati fissi sono la soglia di esaurimento del
mercato a > 0 e il costo unitario di produzione c > 0; le strategie rappresentano le quantità
prodotte, cosı̀ che X = Y = [0, a]. Si introduce una funzione di domanda (identificata col
prezzo) p : [0, a]2 → R definita da
a − (x + y) se x + y < a
p(x, y) =
,
0
se x + y > a
da cui i rispettivi pay-off
(
x(p(x, y) − c) = −x2 − xy + (a − c)x
f (x, y) =
−c
(
y(p(x, y) − c) = −y 2 − xy + (a − c)y
g(x, y) =
−c
se x + y < a
se x + y > a,
se x + y < a
se x + y > a.
Le ipotesi del Teorema 3.9 sono verificate, quindi Ne(Γ) 6= ∅. In effetti, massimizzando i
pay-off si ottiene il sistema misto
−2x − y + a − c = 0
−2y − x + a − c = 0
06x6a−c
0 6 y 6 a − c,
da cui l’unico equilibrio
a−c
a−c
, y=
.
3
3
3.3. Equilibri approssimati. Quando gli insiemi X, Y non sono compatti, è impossibile
applicare il Teorema 3.9. Per questo Brânzei et Al. [4] hanno introdotto la nozione di
equilibrio approssimato:
x=
Definizione 3.19. Siano Γ = (X, Y, f, g) un gioco, ε > 0: un ε-equilibrio di Nash per Γ è
una coppia (x, y) ∈ X × Y t.c.
(i) f (x, y) ≥ sup f (·, y) − ε;
X
(ii) g(x, y) ≥ sup g(x, ·) − ε.
Y
L’insieme degli ε-equilibri di Nash di Γ si denota Neε (Γ).
Anche in questo caso gli equilibri si possono caratterizzare come punti fissi di una multifunzione: poniamo per ogni (x, y) ∈ X × Y
n
o
RPε (y) = x ∈ X : f (x, y) ≥ sup f (·, y) − ε ,
X
TEORIA DEI GIOCHI
27
n
o
ε
(x) = y ∈ Y : g(x, y) ≥ sup g(x, ·) − ε ,
RQ
Y
ε
R (x, y) =
RPε (y)
ε
× RQ
(x).
Come nel Lemma 3.8, si ha
(3.2)
Neε (Γ) = fix(Rε )
L’esistenza di ε-equilibri si può dimostrare sotto ipotesi più blande riguardo X, Y (compensate da condizioni più restrittive su f , g) rispetto a quelle del Teorema 3.9:
Teorema 3.20. Se (X, dX ), (Y, dY ) sono spazi metrici e
(i) f, g : X × Y → R sono uniformemente continue rispetto alla metrica
d (x, y), (z, w) = dX (x, z) + dY (y, w) per ogni (x, y), (z, w) ∈ X × Y ;
(ii) fixδ (Rρ ) 6= ∅ per ogni ρ, δ > 0,
allora per ogni ε > 0 si ha Neε (Γ) 6= ∅.
Dimostrazione. Fissiamo ε > 0. Per (i) esiste η > 0 t.c. per ogni (x, y), (z, w) ∈ X × Y t.c.
η
d (x, y), (z, w) <
2
si ha
ε
(3.3)
max {|f (x, y) − f (z, w)| , |g(x, y) − g(z, w)|} < .
2
ε/2
ε/2
Per (ii) esiste (x, y) ∈ fixη/2 (Rε/2 ), cioè (Definizione 2.39) esistono z ∈ RP (y) e w ∈ RQ (x)
t.c.
η
d((x, y), (z, w)) ≤ < η.
2
Per (3.3) ne segue
ε
sup f (·, y) − ε ≤ f (z, y) − < f (x, y),
2
X
ε
sup g(x, ·) − ε ≤ g(x, w) − < g(x, y),
2
Y
ε
quindi (x, y) ∈ Ne (Γ).
L’ipotesi (i) è difficile da verificare. Possiamo ricorrere alla teoria dei punti fissi approssimati:
Corollario 3.21. Se X, Y sono sottoinsiemi limitati convessi di spazi di Banach riflessivi
t.c. int(X), int(Y ) 6= ∅ e
(i) f, g : X × Y → R sono uniformemente continue rispetto alla metrica
d (x, y), (z, w) = kx − zkX + ky − wkY per ogni (x.y), (z, w) ∈ X × Y ;
(ii) Rρ : X × Y → 2X×Y ha valori non vuoti e convessi per ogni ρ > 0;
(iii) gr(Rρ ) è debolmente chiuso per ogni ρ > 0,
allora per ogni ε > 0 si ha Neε (Γ) 6= ∅.
28
A. IANNIZZOTTO
Dimostrazione. Da (ii) e (iii) segue, per il Teorema 2.40, che per ogni δ, ρ > 0
fixδ (Rρ ) 6= ∅.
Rammentando anche (i), vediamo che sono verificate tutte le ipotesi del Teorema 3.20,
dunque Neε (Γ) 6= ∅ per ogni ε > 0.
Ovviamente, la tecnica degli equilibri approssimati è usata in contesti piuttosto astratti.
Concludiamo questa sezione mostrando un’applicazione del Teorema 3.20:
Esempio 3.22. Siano (X, k · k) uno spazio normato, v ∈ X \ {0} e f, g : X × X → R
definite da
v
f (x, y) = −kx − yk, g(x, y) = −x − y −
per ogni (x, y) ∈ X × X.
1 + kxk
Studiamo il gioco Γ = (X, X, f, g). Si vede facilmente che la multifunzione di miglior
risposta (congiunta) è data da
n
o
v
R(x, y) =
y, x −
per ogni (x, y) ∈ X × X,
1 + kxk
pertanto fix(R) = ∅, ovvero Ne(Γ) = ∅. Cerchiamo dunque equilibri approssimati, applicando il Teorema 3.20. Le funzioni f, g : X × X → R sono lipschitziane (in particolare,
uniformemente continue). Per f la cosa è ovvia. Per g, si dimostra come segue: fissati
(x1 , y1 ), (x2 , y2 ) ∈ X × X, abbiamo
v
v
g(x1 , y1 ) − g(x2 , y2 ) 6 − x2 + y 2 +
x1 − y1 −
1 + kx1 k
1 + kx2 k
kx1 k − kx2 k
6 kx1 − x2 k + ky1 − y2 k + kvk
(1 + kx1 k)(1 + kx2 k)
6 (1 + kvk)d (x1 , y1 ), (x2 , y2 ) .
Inoltre, fissato δ > 0, per ogni x ∈ X t.c. kxk > kvk/δ abbiamo
d (x, x), R(x, x) =
kvk
< δ,
1 + kxk
da cui (x, x) ∈ fixδ (R). In particolare, per ogni ρ, δ > 0 abbiamo fixδ (Rρ ) 6= ∅. Cosı̀ le
ipotesi (i) e (ii) del Teorema 3.20 sono verificate. Dunque, per ogni ε > 0 si ha Neε (Γ) 6= ∅
(in effetti si dimostra che (x, x) ∈ Neε (Γ) per ogni x ∈ X con kxk abbastanza grande).
4. Giochi a somma nulla e teoria del minimax
Mors tua, vita mea.
Anonimo
In questa sezione, dedicata ai giochi a somma nulla, il concetto di equilibrio di Nash viene
messo in relazione con quello di minimax, che è più generale. Per la teoria del minimax,
rimandiamo a Ricceri & Simons [31].
TEORIA DEI GIOCHI
29
Definizione 4.1. Un gioco Γ = (X, Y, f, g) è detto a somma nulla se
f (x, y) + g(x, y) = 0 per ogni (x, y) ∈ X × Y .
In questo caso il gioco si denota Γ = (X, Y, f ).
I giochi a somma nulla corrispondono alle interazioni in cui due (o più) soggetti si contendono
un capitale fissato: i guadagni di uno equivalgono alle perdite dell’altro. Prendiamo dapprima
in esame il caso finito, ovvero X = {x1 , . . . xn }, Y = {y1 , . . . ym } (n, m ∈ N0 ). Se il giocatore
P (che gioca per primo) sceglie la strategia xi (1 ≤ i ≤ n), allora Q minimizza la sua perdita
scegliendo yj (1 ≤ j ≤ m) t.c.
f (xi , yj ) = min f (xi , ·).
Y
Sapendo ciò, P sceglie una strategia xi t.c.
min f (xi , ·) = max min f.
Y
X
Y
Similmente, se Q gioca per primo, la sua scelta ricade su yj t.c.
max f (·, yj ) = min max f.
X
Y
X
Questo ragionamento conduce a un concetto di equilibrio diverso da (in effetti, come si
vedrà, più generale di) quello formulato da Nash: una coppia (xi , yj ) ∈ X × Y verificante
l’eguaglianza di minimax
(4.1)
max min f = min max f.
X
Y
Y
X
Esempio 4.2. Consideriamo il seguente gioco:
P \Q
x1
x2
x3
y1
1
0
−1
y2
2
1
0
Osservando la tabella (i cui numeri rappresentano i pay-off di P e contemporaneamente
gli opposti dei pay-off di Q), si ricava Ne(Γ) = {(x1 , y1 )}; all’unico equilibrio di Nash di Γ
corrisponde il valore 1. D’altra parte si ha
max min f = min max f = 1,
X
Y
Y
X
in particolare vale (4.1).
Se X, Y sono infiniti, l’esistenza di massimi e minimi non è garantita e le definizioni vanno
riformulate:
Definizione 4.3. Sia Γ = (X, Y, f ) un gioco a somma nulla: sono definiti i valori inferiore
e superiore di Γ
f∗ = sup inf f, f ∗ = inf sup f
X
Y
Y
X
(entrambi in R ∪ {±∞}). Se vale l’eguaglianza di minimax
(4.2)
f∗ = f ∗ (= f˜),
30
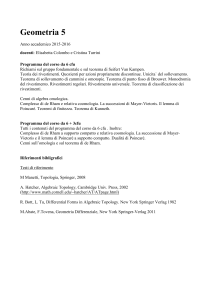
A. IANNIZZOTTO
Figura 2. (0, 0) è un punto di sella per la funzione f (x, y) = y 2 − x2 .
il gioco Γ ha valore f˜. Un punto di sella è una coppia (x, y) ∈ X × Y t.c.
sup f (·, y) = f (x, y) = inf f (x, ·).
Y
X
L’insieme dei punti di sella di f si denota sp(f ).
L’idea geometrica di ’sella’ è esemplificata dalla Fig. 2. Alcune precisazioni:
Lemma 4.4. Se Γ è un gioco a somma nulla, allora si ha
f∗ ≤ f ∗ .
Dimostrazione. Per ogni (x, y) ∈ X × Y abbiamo
inf f (x, ·) ≤ f (x, y) ≤ sup f (·, y),
Y
X
da cui la tesi.
Lemma 4.5. Se Γ è un gioco a somma nulla e (x, y) ∈ sp(f ), allora si ha (4.2) e
f (x, y) = f˜.
Dimostrazione. Si ha
f ∗ ≤ sup f (·, y) = f (x, y) = inf f (x, ·) ≤ f∗ .
Y
X
Dalla Proposizione 4.4 segue (4.2), da quanto sopra segue f (x, y) = f˜.
L’implicazione non si inverte:
Esempio 4.6. Siano X = [0, 1], Y =]0, 1] e f : X × Y → R definita da f (x, y) = xy per
ogni (x, y) ∈ X × Y . L’eguaglianza (4.2) è verificata in quanto
f∗ = sup
inf xy = sup 0 = 0,
0≤x≤1 0<y≤1
∗
f = inf
0≤x≤1
sup xy = inf y = 0.
0<y≤1 0≤x≤1
0<y≤1
TEORIA DEI GIOCHI
31
In particolare, f˜ = 0. Tuttavia il gioco in questione non ammette punti di sella. Ragionando
per assurdo, suppongo che (x, y) ∈ sp(f ): allora
x y = sup xy = y > 0,
0≤x≤1
mentre
x y = inf xy = 0,
0<y≤1
assurdo.
Ovviamente (tenendo conto del fatto che −f esprime i pay-off di Q) si ha:
Teorema 4.7. Se Γ è un gioco a somma nulla, allora si ha
Ne(Γ) = sp(f ).
Dal Lemma 4.5 e dal Teorema 4.7 segue che, se Γ ammette un equilibrio di Nash, allora vale
(4.2). Pertanto, si considera l’eguaglianza di minimax come una forma debole di equilibrio del
gioco e acquistano interesse nell’ottica della teoria dei giochi i risultati che, sotto opprtune
ipotesi, assicurano il verificarsi di (4.2): i teoremi di minimax.
4.1. Alcuni teoremi di minimax. Il primo è dovuto a Von Neumann [36]:
Teorema 4.8. Se X ⊂ Rn , Y ⊂ Rm (n, m ∈ N0 ) sono compatti e convessi, f : X × Y → R
è bilineare, allora sp(f ) 6= ∅.
Dimostrazione. Sia F : X → 2Y definita da
F (x) = y ∈ Y : f (x, y) = inf f (x, ·) per ogni x ∈ X.
Y
Per ogni x ∈ X l’insieme F (x) 6= ∅ è chiuso e convesso. Sia α : X → R definita da
α(x) = inf f (x, ·) per ogni x ∈ X.
Y
Proviamo che α è uniformemente continua: per ogni ε > 0, per il Teorema di Cantor-Heine
esiste δ > 0 t.c.
ε
(4.3)
|f (x, y) − f (z, w)| < per ogni (x, y), (z, w) ∈ X × Y , d((x, y), (z, w)) < δ.
2
Siano x, z ∈ X t.c. kx − zkRn < δ: per ogni y ∈ Y ho
α(x) ≤ f (x, y) ≤ sup |f (x, ·) − f (z, ·)| + f (z, y),
Y
da cui
α(x) − α(z) ≤ sup |f (x, ·) − f (z, ·)| .
Y
Ragionando analogamente otteniamo
α(z) − α(x) ≤ sup |f (x, ·) − f (z, ·)| .
Y
In conclusione, applicando (4.3),
|α(x) − α(z)| ≤ sup |f (x, ·) − f (z, ·)| ≤
Y
ε
< ε.
2
32
A. IANNIZZOTTO
Proviamo ora che gr(F ) ⊆ X × Y è chiuso: siano (xn , yn ) ∈ gr(F ) per ogni n ∈ N,
(x, y) ∈ X × Y t.c. (xn , yn ) → (x, y); per ogni n ∈ N abbiamo
f (xn , yn ) = α(xn ),
da cui, passando al limite per n → ∞,
f (x, y) = α(x)
ovvero (x, y) ∈ gr(F ). Per la Proposizione 2.14, F è s.c.s. Sia ora G : Y → 2X definita da
G(y) = x ∈ X : f (x, y) = sup f (·, y) per ogni y ∈ Y .
X
Come sopra dimostro che G è s.c.s. a valori non vuoti, chiusi e convessi. Per il Lemma
2.20, G × F : X × Y → 2X×Y è s.c.s. a valori compatti. Dunque il Teorema 2.36 assicura
l’esistenza di (x, y) ∈ fix(G × F ): chiaramente si ha (x, y) ∈ sp(f ).
Il seguente risultato di Fan [12] estende l’eguaglianza di minimax a classi più ampie di
funzioni e di spazi:
Teorema 4.9. Se (X, τX ), (Y, τY ) sono spazi vettoriali-topologici localmente convessi di
Hausdorff, S ⊂ X, T ⊂ Y insiemi non vuoti, compatti e convessi, f : S × T → R t.c.
(i) f (·, y) è s.c.s. e quasi-concava per ogni y ∈ T ;
(ii) f (x, ·) è s.c.i. e quasi-convessa per ogni x ∈ S,
allora si ha
sup inf f = inf sup f.
S
T
T
S
Dimostrazione. Procediamo per assurdo, supponendo che esista c ∈ R t.c.
(4.4)
f∗ < c < f ∗ .
L’insieme K = S × T è compatto e convesso nello spazio vettoriale-topologico localmente
convesso di Hausdorff X × Y . Sia F : K → 2K definita da
F (x, y) = (z, w) ∈ K : min{f (x, w) − c, c − f (z, y)} ≤ 0 per ogni (x, y) ∈ K.
Dimostriamo che
(4.5)
∩(x,y)∈K F (x, y) 6= ∅.
c
Per ogni (x, y) ∈ K gli insiemi f (x, ·) , f (·, y)c (non vuoti per (4.4)) sono chiusi per le
ipotesi (i), (ii), quindi
c
F (x, y) = f (·, y)c × f (x, ·)
è un sottoinsieme chiuso del compatto K; dunque F ha valori compatti. Inoltre F verifica
KKM (ved. Definizione 2.41): lo proviamo per assurdo, supponendo che esistano n ∈ N0 ,
(x1 , y1 ), . . . (xn , yn ) ∈ K, (z0 , w0 ) ∈ conv((x1 , y1 ), . . . (xn , yn )) t.c.
(z0 , w0 ) ∈
/ ∪ni=1 F (xi , yi ).
Questo significa che, per ogni i ∈ {1, . . . n}, si ha
f (z0 , yi ) < c < f (xi , w0 ),
TEORIA DEI GIOCHI
33
ovvero yi ∈ f (z0 , ·)c e xi ∈ f (·, w0 )c , insiemi entrambi convessi (ancora (i), (ii)). Pertanto
w0 ∈ f (z0 , ·)c e z0 ∈ f (·, w0 )c , ovvero
c < f (z0 , w0 ) < c,
una contraddizione. Applicando il Corollario 2.43 si ottiene (4.5). Sia dunque (z, w) ∈
∩(x,y)∈K F (x, y): si ha per ogni (x, y) ∈ K
min{f (x, w) − c, c − f (z, y)} ≤ 0.
Possono presentarsi due casi:
• se f (x, w) ≤ c per ogni x ∈ S, si ha
f ∗ ≤ sup f (·, w) ≤ c,
S
contro (4.4);
• se esiste x ∈ S t.c. f (x, w) > c, allora f (z, y) ≥ c per ogni y ∈ T , da cui
f∗ ≥ inf f (z, ·) ≥ c,
T
contro (4.4).
In ogni caso, (4.4) conduce a una contraddizione. Tenendo conto della Proposizione 4.4,
posso concludere che f∗ = f ∗ .
Osservazione 4.10. Dalla dimostrazione del Teorema 4.9 segue che esiste (x, y) ∈ S × T
t.c.
f (x, y) = f˜.
Tuttavia, questo non implica che (x, y) sia un punto di sella per f .
Per studiare il problema del minimax in assenza di una struttura vettoriale, tipicamente si
tende a sostituire la convessità con la connessione. Uno dei risultati più raffinati in questo
contesto è dovuto a König [19]:
Teorema 4.11. Se (X, τX ) è uno spazio topologico, (Y, τY ) uno spazio compatto, f : X×Y →
R t.c.
c
(i) ∩x∈H f (x, ·) è connesso per ogni c > f∗ , H ⊂ X non vuoto e finito;
(ii) ∩y∈K f (·, y)c è connesso per ogni c < f ∗ , K ⊂ Y non vuoto;
(iii) f (·, y) è s.c.s. per ogni y ∈ Y ;
(iv) f (x, ·) è s.c.i. per ogni x ∈ X,
allora si ha (4.2).
Il limite del Teorema 4.11 consiste nel fatto che (a differenza dalla convessità) la proprietà
di connessione non è stabile rispetto all’intersezione. I seguenti esempi chiariscono alcuni
aspetti del problema.
Esempio 4.12. Nello spazio euclideo R2 siano X = B 1 (0), Y = ∂B1 (0), e sia f : X ×Y → R
definita da
f (x, y) = hx, yi per ogni (x, y) ∈ X × Y .
34
A. IANNIZZOTTO
c
La funzione f verifica le ipotesi (iii), (iv) del Teorema 4.11. Inoltre, f (x, ·) è connesso per
ogni c > f∗ , x ∈ X e f (·, y)c è connesso per ogni c < f ∗ , y ∈ Y , anche se le condizioni (i),
(ii) non sono verificate. Nondimeno si ha f∗ = 0, f ∗ = 1.
Esempio 4.13. Siano (Z, k · k) uno spazio di Hilbert t.c. dim(Z) = ∞ e
X = x ∈ Z : kxk ≥ 1 , Y = y ∈ Z : kyk ≤ 1 .
Su X adottiamo la topologia forte, su Y quella debole (cosı̀ che Y è compatto). Sia
f : X × Y → R definita da
f (x, y) = hx, yi per ogni (x, y) ∈ X × Y .
La funzione f verifica le ipotesi (i), (iii), (iv) del Teorema 4.11. Inoltre essa verifica
’quasi’ l’ipotesi (ii), in quanto ∩y∈K f (·, y)c è connesso per ogni c ∈ R e ogni K ⊂ Y finito.
Nondimeno si ha f∗ = 0, f ∗ = 1.
Nel caso particolare in cui X è un intervallo compatto in R, le ipotesi di connessione possono
essere alleggerite, riferendole a singoli sotto- e sopra-livelli di f (ved. Ricceri [32]). Lo
strumento fondamentale per questo studio è il seguente risultato di coincidenza per le
multifunzioni:
Lemma 4.14. Se a, b ∈ R, a < b, (Z, τ ) è uno spazio connesso, F, G : Z → 2[a,b] sono s.c.i.
a valori non vuoti e connessi, t.c. F (Z) = [a, b], allora esiste z ∈ Z t.c.
F (z) ∩ G(z) 6= ∅.
Dimostrazione. Procediamo per assurdo, supponendo
(4.6)
F (z) ∩ G(z) = ∅ per ogni z ∈ Z.
2
Sia H = F × G, allora H : Z → 2[a,b] è s.c.i. a valori non vuoti e connessi. Per il Teorema
2.18, H(Z) è connesso. Siano
A = {(p, q) ∈ [a, b]2 : p < q}, B = {(p, q) ∈ [a, b]2 : p > q},
insiemi aperti in [a, b]2 t.c. H(Z) ⊆ A ∪ B (per (4.6)). Poiché F (Z) = [a, b], esiste z0 ∈ Z
t.c. a ∈ F (z0 ): scelto q ∈ G(z0 ), sempre per (4.6) ho a < q ovvero (a, q) ∈ H(z0 ) ∩ A, cosı́
che H(Z) ∩ A 6= ∅. Similmente dimostriamo che H(Z) ∩ B 6= ∅, contro la connessione di
H(Z).
Ne segue un teorema di minimax assai generale:
Teorema 4.15. Se a, b ∈ R, a < b, (Y, τ ) è uno spazio topologico, f : [a, b] × Y → R verifica
le seguenti condizioni:
(i) f (x, ·)c è non vuoto e connesso per ogni x ∈ [a, b], c > f∗ ;
(ii) f (·, y)c è non vuoto e connesso per ogni y ∈ Y , c > f∗ ;
(iii) f (x, ·) è s.c.i. per ogni x ∈ [a, b];
(iv) f (·, y) è s.c.s. per ogni y ∈ Y ,
allora si ha
sup inf f = inf sup f.
[a,b] Y
Y
[a,b]
TEORIA DEI GIOCHI
35
Dimostrazione. Procediamo per assurdo, supponendo che esista c ∈ R t.c.
f∗ < c < f ∗ .
(4.7)
Su [a, b] adottiamo la topologia euclidea. Siano
S = (x, y) ∈ [a, b] × Y : f (x, y) < c , T = (x, y) ∈ [a, b] × Y : f (x, y) > c .
Proviamo che S è connesso. Ovviamente [a, b] è connesso; inoltre, per ogni x ∈ [a, b], da
c > f∗ ≥ inf f (x, ·)
Y
segue che Sx 6= ∅, e tale insieme è connesso (i); per ogni y ∈ Y , S y è aperto (iv). Dunque,
l’asserto segue dal Lemma 2.22.
Siano F, G : S → 2[a,b] definite da F (x, y) = {x}, G(x, y) = T y per ogni (x, y) ∈ S. Per
ogni (x, y) ∈ S, chiaramente F (x, y) 6= ∅ è connesso; F è s.c.i.; inoltre, per ogni x ∈ [a, b],
esiste y ∈ Y t.c. x ∈ F (x, y) (come visto sopra), quindi F (S) = [a, b]. D’altra parte,
per ogni (x, y) ∈ S l’insieme G(x, y) 6= ∅ è connesso (ii); infine, per ogni z ∈ [a, b] e ogni
(x, y) ∈ G− (z) abbiamo
f (z, y) > c,
quindi (iii) esiste W ∈ UY (y) t.c.
f (z, w) > c per ogni w ∈ W ,
cosı̀ che (u, w) ∈ G− (z) per ogni (u, w) ∈ S t.c. w ∈ W ovvero G− (z) è aperto, in particolare
G è s.c.i. Per la Proposizione 4.14 esiste (x, y) ∈ S t.c.
F (x, y) ∩ G(x, y) 6= ∅.
Si ha dunque x ∈ T y , ovvero (x, y) ∈ S ∩ T , assurdo.
5. Giochi cooperativi
Hey you, don’t tell me there’s no hope at all.
Together we stand, divided we fall.
R. Waters
In questa sezione introduciamo i giochi cooperativi, caratterizzati dalla possibilità che i giocatori si associno in coalizioni per perseguire una maggiore utilità: presupposto fondamentale
perché ciò avvenga è che i giocatori possano comunicare tra loro stabilendo degli accordi.
Per semplicità esamineremo il caso dei giochi cooperativi statici. Per approfondimenti
rimandiamo a Colombo [10], Morgenstern [27].
Definizione 5.1. Siano P un insieme, v : 2P → R+ una funzione verificante le proprietà
(i) v(∅) = 0;
(ii) se S, T ∈ 2P , S ∩ T = ∅, allora v(S ∪ T ) ≥ v(S) + v(T ).
La coppia Γ = (P, v) è detta gioco (cooperativo); gli elementi di P sono detti giocatori, i
sottoinsiemi di P coalizioni, v(S) utilità corrispondente alla coalizione S ∈ 2P , v funzione
caratteristica del gioco.
36
A. IANNIZZOTTO
La proprietà (ii) della Definizione 5.1 è detta super-additività ed esprime il fatto che
coalizzarsi ’conviene’ ai singoli giocatori (essa non è richiesta in tutte le versioni della
teoria dei giochi cooperativi). In particolare, alla grande coalizione P corrisponde il valore
massimo della funzione caratteristica: questo rappresenta l’utilità totale del gioco, e il
problema principale consiste nel trovare una coalizione che distribuisca tale utilità in modo
soddisfacente per tutti i giocatori che la formano. Nel seguito adotteremo la notazione
P = {1, . . . n} (n ∈ N0 ).
Definizione 5.2. Due giochi Γ = (P, v), Γ0 = (P, v 0 ) si dicono strategicamente equivalenti
(Γ ∼ Γ0 ) se esistono r > 0, a1 , . . . an ∈ R t.c.
X
v 0 (S) = rv(S) +
ai per ogni S ∈ 2P .
i∈S
Si dimostra facilmente che l’equivalenza strategica è effettivamente una relazione di equivalenza (riflessiva, simmetrica, transitiva) sull’insieme dei giochi con insieme dei giocatori P .
Segnaliamo ora alcune importanti classi di giochi cooperativi.
Definizione 5.3. Un gioco Γ = (P, v) è detto
(i) essenziale se
n
X
v(P ) >
v(i);
i=1
(ii) normale se v(P ) = 1 e v(i) = 0 per ogni i ∈ P ;
(iii) semplice se v(S) ∈ {0, 1} per ogni S ∈ 2P ;
(iv) a somma costante se v(S) + v(P \ S) = v(P ) per ogni S ∈ 2P .
Chiaramente ogni gioco essenziale e semplice è normale. Inoltre, ogni gioco essenziale può
essere normalizzato:
Lemma 5.4. Se Γ = (P, v) è un gioco essenziale, allora esiste un unico gioco normale
Γ0 = (P, v 0 ) tale che Γ ∼ Γ0 .
Dimostrazione. Sia
P
v(S) − i∈S v(i)
Pn
v (S) =
per ogni S ∈ 2P .
v(P ) − j=1 v(j)
0
Il gioco Γ0 = (P, v 0 ) è normale. Inoltre, posto
n
h
i−1
X
r = v(P ) −
v(j) , ai = −rv(i) per ogni i ∈ P ,
j=1
si ha
v 0 (S) = rv(S) +
X
ai per ogni S ∈ 2P ,
i∈S
0
ovvero Γ ∼ Γ . L’unicità è provata facilmente.
Una nozione che sarà richiamata in seguito è quella di giocatore fantoccio (dummy player):
TEORIA DEI GIOCHI
37
Definizione 5.5. In un gioco Γ = (P, v), i ∈ P è detto giocatore fantoccio se
v(S ∪ {i}) = v(S) + v(i) per ogni S ∈ 2P .
Esempio 5.6. Nel gioco delle pertiche, tre esploratori devono attraversare un fiume di
larghezza l > 0 e ognuno di essi possiede una pertica di lunghezza 2l/3. Si ha P = {1, 2, 3}
e, posta 1 l’utilità di attraversare il fiume, possiamo enumerare tutti i valori della funzione
caratteristica v : 2P → R:
v(p1 ) = v(p2 ) = v(p3 ) = 0, v({p1 , p2 }) = v({p1 , p3 }) = v({p2 , p3 }) = v({p1 , p2 , p3 }) = 1.
Il gioco Γ = (P, v) è semplice e a somma costante.
Esempio 5.7. Nel gioco della produzione, tre imprenditori P = {p1 , p2 , p3 } dispongono di
tre materie prime, per esempio ferro, gomma e legno, nelle quantità indicate dalla seguente
tabella:
f g l
p1 2 3 3
p2 3 0 3
p3 1 3 0
Per produrre un’unità di prodotto finito (che si vende al prezzo 1) serve un’unità di
ciascuna materia prima. La funzione caratteristica determina il ricavo ottenibile da ciascuna
coalizione:
v(p1 ) = 2, v(p2 ) = v(p3 ) = 0,
v({p1 , p2 }) = v({p1 , p3 }) = v({p2 , p3 }) = 3,
v({p1 , p2 , p3 }) = 6.
Il gioco Γ = (P, v) non è a somma costante (v(p1 ) + v({p2 , p3 }) = 5) e neanche normale. Il
gioco normalizzato Γ0 = (P, v 0 ) si ottiene ponendo
1
1
r = , a1 = − , a2 = a3 = 0.
4
2
Esempio 5.8. Nel gioco della maggioranza pesata, i partiti P = {p1 , . . . pn } (n ∈ N0 )
dispongono ciascuno di si seggi in parlamento (si ∈ N per ogni i ∈ {1, . . . n}) e il quorum
per approvare una legge è q ∈ N. La situazione configura un gioco semplice Γ = (P, v) con
P
0 se Pi∈S si < q
v(S) =
.
1 se i∈S si ≥ q
Le nozioni introdotte di seguito servono a definire un concetto ragionevole di soluzione per i
giochi cooperativi.
Definizione 5.9. Un’imputazione per il gioco Γ = (P, v) è un vettore x ∈ Rn t.c.
n
X
(i)
xi = v(P ) (efficienza);
i=1
(ii) xi ≥ v(i) per ogni i ∈ {1, . . . n} (razionalità individuale).
L’insieme delle imputazioni di Γ si denota i(Γ).
38
A. IANNIZZOTTO
Figura 3. Un 2-simplesso in R3 .
L’insieme i(Γ) si può rappresentare graficamente mediante un simplesso (n − 1)-dimensionale
in Rn (come nella Fig. 3). Introduciamo ora la nozione di nucleo, che esprime il sottoinsieme
di i(Γ) contenente le imputazioni vantaggiose non solo per i singoli giocatori, ma anche per
ciascuna coalizione:
Definizione 5.10. Il nucleo del gioco Γ = (P, v) è l’insieme delle imputazioni x ∈ i(Γ) t.c.
X
xi ≥ v(S) per ogni S ∈ 2P .
i∈S
Il nucleo di Γ si denota c(Γ).
L’insieme c(Γ) ⊂ Rn è chiuso e convesso. Il problema di determinare il nucleo di Γ rientra
nella programmazione lineare (una branca dell’ottimizzazione): si definiscono un insieme
n
o
X
X = (x1 , . . . xn ) ∈ Rn :
xi ≥ v(S) per ogni S ∈ 2P
i∈S
e una funzione f : X → R definita da
f (x1 , . . . xn ) =
n
X
xi ;
i=1
per il Teorema di Weierstraß e per la definizione di X, esiste (x1 , . . . xn ) ∈ X t.c.
f (x1 , . . . xn ) = inf f = f ≥ v(P ).
X
A questo punto occorre distinguere due casi:
• se f = v(P ), allora (x1 , . . . xn ) ∈ c(Γ);
• se f > v(P ), allora c(Γ) = ∅.
TEORIA DEI GIOCHI
39
Nell’Esempio 5.6 si ha c(Γ) = ∅, nell’Esempio 5.7 si ha
c(Γ) = (x1 , x2 , 6 − x1 − x2 ) ∈ R3 : 2 ≤ x1 ≤ 3, 0 ≤ x2 ≤ 3, x1 + x2 ≤ 3 .
Esempio 5.11. Nel gioco dei musicisti, tre suonatori P = {p1 , p2 , p3 } si esibiscono da soli,
in duo o in trio percependo i seguenti salari:
v(p1 ) = 100, v(p2 ) = 150, v(p3 ) = 200,
v({p1 , p2 }) = 400, v({p1 , p3 }) = 300, v({p2 , p3 }) = 400,
v({p1 , p2 , p3 }) = 600.
Attraverso un procedimento grafico, si ottiene
c(Γ) = (x1 , 400 − x1 , 200) : 100 ≤ x1 ≤ 200 .
Esempio 5.12. Nel gioco dei guanti, 10 persone hanno ciascuna un guanto sinistro e 11
persone hanno ciascuna un guanto destro; ovviamente un guanto solo è inservibile, come
pure due guanti uguali, mentre un paio di guanti (diversi) vale 1. Il gioco Γ = (P, v) ha la
seguente struttura: P = L ∪ R, dove L = {1, . . . 10} è l’insieme di persone con un guanto
sinistro e R = {11, . . . 21} l’insieme di persone con un guanto destro, e per ogni S ∈ 2P si ha
v(S) = min{|S ∩ L|, |S ∩ R|}.
Chiaramente
21
n
o
X
i(Γ) = x ∈ R21 :
xi = 10, xi ≥ 0 per ogni i ∈ {1, . . . 21} .
i=1
Detta x ∈ i(Γ) l’imputazione che ha le prime 10 componenti pari a 1 e le altre 11 pari a 0,
si ha
c(Γ) = {x}.
Prima dimostriamo che x ∈ c(Γ). Per ogni S ∈ 2P ho
X
xi = |S ∩ L| ≥ v(S).
i∈S
Poi proviamo che x è l’unica imputazione di c(Γ), per assurdo: sia z ∈ c(Γ) \ {x}. Distinguo
due casi:
• se esiste 11 ≤ h ≤ 21 t.c. zh = a > 0, allora, posto S = P \ {ph }, si ha
X
X
10 = v(S) ≤
zi =
zi = 10 − a < 10,
i∈S
i6=h
assurdo;
• se zi = 0 per ogni i ∈ {11, . . . 21}, da z =
6 x segue che esiste 1 ≤ j ≤ 10 t.c.
zj = b < 1, da cui, per T = {j, 11}, si ha
X
1 = v(T ) ≤
zi = zj + z11 = b < 1,
i∈T
assurdo.
40
A. IANNIZZOTTO
Questo esempio suggerisce l’idea di un forte vantaggio per i possessori di guanti sinistri,
ovvero del bene più raro.
In alcuni casi, il nucleo si determina facilmente:
Proposizione 5.13. Se Γ = (P, v) è un gioco essenziale a somma costante, allora c(Γ) = ∅.
Dimostrazione. Per assurdo: sia x ∈ c(Γ). Allora, per ogni j ∈ {1, . . . n} si ha
X
v(P ) − v(j) = v(P \ {j}) ≤
xi = v(P ) − xj ,
i6=j
cioè xj = v(j), da cui
n
X
v(P ) =
i=1
xi =
n
X
v(i),
i=1
assurdo.
Nei giochi semplici (Definizione 5.3 (iii)) si definisce una classe particolare di giocatori:
Definizione 5.14. Sia Γ = (P, v) un gioco semplice: i è detto giocatore di veto se v(P \
{i}) = 0.
Chiaramente, in un gioco semplice ogni coalizione ’vincente’ deve contenere tutti gli eventuali
giocatori di veto: se S ∈ 2P e i ∈
/ S è un giocatore di veto, si ha S ⊆ P \ {i}, da cui
v(S) ≤ v(P \ {i}) = 0.
Questa nozione si collega a quella di nucleo:
Proposizione 5.15. Se Γ = (P, v) è un gioco semplice, le seguenti sono equivalenti:
(i) c(Γ) 6= ∅;
(ii) Γ ha almeno un giocatore di veto.
Dimostrazione. Proviamo che (i) implica (ii), per assurdo: sia v(P \ {i}) = 1 per ogni
i ∈ {1, . . . n} e sia x ∈ c(Γ); allora per ogni j ∈ {1, . . . n} si ha
X
0 ≤ xj = 1 −
xi ≤ 1 − v(P \ {xj }) = 0,
i6=j
contro l’ipotesi che x sia un’imputazione. Proviamo che (ii) implica (i): sia S la coalizione
formata da tutti i giocatori di veto (S 6= ∅). Definiamo x ∈ Rn ponendo
0
se i ∈
/S
xi =
.
1/|S| se i ∈ S
Ottengo cosı̀
n
X
i=1
Inoltre, se T ∈ 2P , distinguiamo due casi:
xi = 1.
TEORIA DEI GIOCHI
• se v(T ) = 0, allora banalmente
X
41
xi ≥ v(T );
i∈T
• se v(T ) = 1, per quanto sopra S ⊆ T , da cui
X
X
xi ≥
xi = 1.
i∈T
i∈S
Dunque, x ∈ c(Γ).
5.1. Valore di Shapley. Definiamo adesso il più comune (non l’unico) concetto di soluzione
per un gioco cooperativo Γ = (P, v), introdotto da Shapley [35]. Per semplicità adotto la
notazione P = {1, . . . n} (n ∈ N0 ). Introduco l’insieme delle permutazioni di P
P ! = σ : P → P : σ biunivoca .
Per ogni i ∈ P , σ ∈ P ! sia
S(i, σ) = j ∈ P : σ(j) < σ(i)
la coalizione formata dai giocatori che precedono i nell’ordine stabilito da σ, e sia
M (i, σ) = v(S(i, σ) ∪ {i}) − v(S(i, σ))
il contributo marginale di i (ovvero l’incremento di utilità offerto dal giocatore i alla coalizione
S(i, σ)). Per la (ii) della Definizione 5.1 si ha
M (i, σ) ≥ v(i) per ogni i ∈ P , σ ∈ P !.
(5.1)
Facendo variare σ ∈ P !, la media dei contributi marginali di i ne misura il valore:
Definizione 5.16. Il valore di Shapley del gioco Γ è il vettore φ = (φ1 , . . . φn ) definito da
1 X
φi =
M (i, σ) per ogni i ∈ P .
n! σ∈P !
Il valore di Shapley di Γ si denota Sv(Γ).
L’interpretazione della Definizione 5.16 è la seguente: per ogni i ∈ P , φi rappresenta la
ricompensa corrisposta al giocatore i, tanto maggiore quanto più rilevante è il contributo
dato da i alle varie coalizioni che si possono formare. Per esempio, se si vuole organizzare
un torneo di calcio avendo a disposizione molti bravi attaccanti ma pochi bravi difensori, il
’valore’ di questi ultimi (cioè la loro quota del premio in caso di vittoria) sarà maggiore di
quello degli attaccanti.
Osservazione 5.17. La formula della Definizione 5.16 può risultare di difficile computazione
(n! addendi). In tal caso si può usare la formula equivalente
1 X
φi =
|S|!(n − |S| − 1)! (v(S ∪ {i}) − v(S)) per ogni i ∈ P .
n!
i∈S
/
Infatti, per ogni σ ∈ P !, M (i, σ) non dipende da σ bensı̀ solo da S(i, σ). D’altra parte,
il numero delle permutazioni che producono una fissata coalizione S è |S|!(n − |S| − 1)!.
42
A. IANNIZZOTTO
In questa formula, gli addendi sono 2n−1 (sottoinsiemi di P \ {i}), il che rende la formula
apprezzabile per valori grandi di n, in quanto
2n−1
= 0.
lim
n
n!
Esempio 5.18. Sia Γ = (P, v) il gioco con P = {1, 2, 3} e
v(1) = v(2) = v(3) = 0,
v({1, 2}) = v({1, 3}) = 4, v({2, 3}) = 6,
v({1, 2, 3}) = 20.
I contributi marginali possono essere raccolti nella seguente tabella:
σ\i
123
132
213
231
312
321
1
0
0
4
14
4
14
2
3
4 16
16 4
0 16
0
6
16 0
6
0
Dunque si ha Sv(Γ) = (6, 7, 7).
I seguenti risultati mostrano che il valore di Shapley rappresenta una soluzione del gioco:
Teorema 5.19. Si ha Sv(Γ) ∈ i(Γ).
Dimostrazione. Innanzitutto osserviamo che
n
n
X
X
1 X
M (i, σ)
φi =
n!
i=1
i=1
σ∈P !
n
1 XX
M (i, σ)
n! σ∈P ! i=1
1 X
=
[v(P ) − v(∅)]
n! σ∈P !
=
= v(P ).
Inoltre, per ogni i ∈ P , da (5.1) segue
φi ≥
1 X
v(i) = v(i).
n! σ∈P !
Dunque, φ è un’imputazione.
Inoltre si hanno altre proprietà, riassunte nel seguente Teorema di Shapley:
Teorema 5.20. Siano Γ = (P, v), Γ0 = (P, v 0 ) giochi con Sv(Γ) = φ, Sv(Γ0 ) = φ0
(i) detto Γ + Γ0 = (P, v + v 0 ), allora Sv(Γ + Γ0 ) = φ + φ0 (additività);
TEORIA DEI GIOCHI
43
P
(ii) se esistono r > 0, a1 , . . . an ∈ R t.c. v 0 (S) = rv(S) + i∈S ai per ogni S ∈ 2P ,
allora φ0 = rφ + (a1 , . . . an ) (invarianza per equivalenza strategica);
(iii) se esiste σ ∈ P ! t.c. v 0 (S) = v(σ(S)) per ogni S ∈ 2P , allora φ0i = φσ(i) (simmetria);
(iv) se i ∈ P è un giocatore fantoccio, allora φi = v(i).
Dimostrazione. Dimostriamo (i): per ogni i ∈ P si ha
1 X
Svi (Γ + Γ0 ) =
[(v + v 0 )(S(i, σ) ∪ {i}) − (v + v 0 )(S(i, σ))]
n! σ∈P !
= φi + φ0i .
Dimostriamo (ii): per ogni i ∈ P si ha
1 X 0
φ0i =
[v (S(i, σ) ∪ {i}) − v 0 (S(i, σ))]
n! σ∈P !
i
X
X
1 Xh
rv(S(i, σ) ∪ {i}) +
aj + ai − rv(S(i, σ)) −
aj
=
n! σ∈P !
j∈S(i,σ)
j∈S(i,σ)
1 X
[rM (i, σ) + ai ]
=
n! σ∈P !
= rφi + ai .
Dimostriamo (iii): per ogni i ∈ P si ha
1 X 0
φ0i =
[v (S(i, ρ) ∪ {i}) − v 0 (S(i, ρ))]
n! ρ∈P !
1 X
[v(σ(S(i, ρ)) ∪ {σ(i)}) − v(σ(S(i, ρ)))]
=
n! ρ∈P !
= φσ(i) .
Dimostriamo (iv): si ha
1 X
[v(S(i, σ) ∪ {i}) − v(S(i, σ))]
n! σ∈P !
1 X
=
v(i)
n! σ∈P !
φi =
= v(i).
Questo conclude la dimostrazione.
Osservazione 5.21. Le proprietà (i)-(iv) sono caratteristiche del valore di Shapley (altre
definizioni di soluzione di un gioco possiedono alcune di queste proprietà, ma non tutte).
Introduciamo una nuova classe di giochi:
Definizione 5.22. Un gioco Γ = (P, v) è detto convesso se
v(S ∩ T ) + v(S ∪ T ) ≥ v(S) + v(T ) per ogni S, T ∈ 2P .
44
A. IANNIZZOTTO
L’interpretazione della Definizione 5.22 è la seguente: siano A, B, C ∈ 2P t.c. A ⊆ B,
B ∩ C = ∅; posto S = A ∪ C, T = B, si ha
v(B ∪ C) − v(B) ≥ v(A ∪ C) − v(A),
ovvero il contributo marginale offerto da C a una coalizione è tanto maggiore, quanto più
grande è la coalizione stessa. Nei giochi convessi il valore di Shapley assume un’importanza
ancora più spiccata:
Teorema 5.23. Se Γ = (P, v) è un gioco convesso, allora Sv(Γ) ∈ c(Γ).
Dimostrazione. Fissata σ ∈ P !, sia ψi = M (i, σ). Dimostriamo che ψ ∈ c(Γ): per ogni
T ∈ 2P , dalla convessità di Γ segue che per ogni i ∈ T
ψi = v({j ∈ P : σ(j) ≤ σ(i)}) − v({j ∈ P : σ(j) < σ(i)})
≥ v({j ∈ T : σ(j) ≤ σ(i)}) − v({j ∈ T : σ(j) < σ(i)}),
da cui
X
i∈T
ψi ≥
X
v({j ∈ T : σ(j) ≤ σ(i)}) −
i∈T
X
v({j ∈ T : σ(j) < σ(i)})
i∈T
= v(T ).
Rammentando che c(Γ) è convesso e che
Sv(Γ) =
1 X
ψ,
n! σ∈P !
si ha infine φ ∈ c(Γ).
Di conseguenza, i giochi convessi hanno nucleo non vuoto. Ma, anche se c(Γ) = ∅, il valore
di Shapley fornisce una soluzione di Γ.
5.2. Esempi. Presentiamo qui alcuni esempi di giochi cooperativi, studiati mediante il
valore di Shapley.
Esempio 5.24. Quattro azionisti possiedono rispettivamente il 10%, 20%, 30%, 40% di
un’azienda; in una riunione dell’assemblea degli azionisti, una proposta viene approvata se
ottiene i voti dei titolari di più del 50% dell’azienda. Questa situazione si può rappresentare
con un gioco semplice Γ = (P, v), dove P = {1, 2, 3, 4} e
v(1) = v(2) = v(3) = v(4) = 0,
v({1, 2}) = v({1, 3}) = v({1, 4}) = v({2, 3}) = 0, v({2, 4}) = v({3, 4}) = 1,
v({1, 2, 3}) = v({1, 2, 4}) = v({1, 3, 4}) = v({2, 3, 4}) = 1,
v({1, 2, 3, 4}) = 1.
Poiché Γ è semplice e non ha alcun giocatore di veto, si ha c(Γ) = ∅ (Proposizione 5.15).
Per calcolare Sv(Γ) usiamo l’Osservazione 5.17:
1 X
φi =
|S|!(3 − |S|)!.
4!
i∈S
/
TEORIA DEI GIOCHI
45
Ricavo φ = (2/24, 6/24, 6/24, 10/24), con il sorprendente esito che la ricompensa di 2 è
uguale a quella di 3, benché quest’ultimo possieda più titoli.
Esempio 5.25. Il Consiglio di Sicurezza dell’ONU è formato da 5 membri permanenti
(con diritto di veto) e da 10 membri transitori (senza diritto di veto); una proposta al
Consiglio viene approvata se ottiene almeno 9 voti favorevoli, tra i quali tutti i voti dei
membri permanenti. Nasce un gioco semplice Γ = (P, v) con P = {1, . . . 15}, V = {1, . . . 5}
(giocatori di veto) e funzione caratteristica definita per ogni S ∈ 2P da
1 se |S| ≥ 9 e V ⊂ S
v(S) =
.
0 altrimenti
Questo è uno dei casi in cui l’Osservazione 5.17 risulta utile (15! ∼ 1300 · 109 , 214 = 16384):
1 X
(5.2)
φi =
|S|!(14 − |S|)! [v(S ∪ {i}) − v(S)] per ogni i ∈ P .
15!
i∈S
/
Fissato i ∈ P \ V , per ogni S ∈ 2P , i ∈
/ S esaminiamo tre casi speciali:
• se |S| ≤ 7 si ha v(S ∪ {i}) − v(S) = 0;
• se |S| ≥ 9 si ha v(S ∪ {i}) − v(S) = 0;
• se V \ S 6= ∅ si ha v(S ∪ {i}) − v(S) = 0.
Dunque in (5.2) vanno contate solo le coalizioni S ⊆ P \ {i} t.c. |S| = 8, V ⊂ S: il loro
numero è 9!/(3!6!), sicché
9!8!6!
4
φi =
=
.
15!3!6!
2145
Se invece i ∈ V , osserviamo che
• se |S| ≤ 7 si ha v(S ∪ {i}) − v(S) = 0;
• se V \ (S ∪ {i}) 6= ∅ si ha v(S ∪ {i}) − v(S) = 0.
Dunque in (5.2) vanno contate solo le coalizioni S ⊆ P \ {i} t.c. |S| ≥ 8, V \ {i} ⊂ S e si
ricava
14
1 X k!(14 − k)!10!
421
φi =
=
.
15! k=8 (k − 4)!(14 − k)!
2145
Dal confronto tra i due risultati si può dedurre che un membro permanente del Consiglio è
molto più importante di uno transitorio, indipendentemente dalla durata.
Per concludere, presentiamo un esempio di gioco subadditivo (la differenza, rispetto alla
Definizione 5.1, è che può aversi v(S ∪ T ) < v(S) + v(T ) per una coppia di coalizioni
S, T ∈ 2P , S ∩ T = ∅). Per tali giochi, i concetti di imputazione e di nucleo come sono stati
fin qui definiti non hanno senso, mentre è ancora possibile calcolare il valore di Shapley.
Esempio 5.26. Nel gioco dell’aeroporto, si considera un aeroporto in cui atterrano aerei
diversi, che richiedono piste di lunghezza diversa; il costo di manutenzione di ciascuna pista
va ripartito tra gli aerei che ne fanno uso, tenendo conto che ognuno di essi usura una parte
diversa della pista. I giocatori (gli aerei) siano P = {p1 , . . . pn }, raggruppati in k classi
P1 = {p1 , . . . pm1 }, . . . Pk = {pmk−1 +1 , . . . pmk } (1 ≤ m1 ≤ . . . ≤ mk = n)
46
A. IANNIZZOTTO
in modo che gli aerei della classe Pj abbiano bisogno di una pista di costo (lunghezza) cj
(0 < c1 < . . . < ck ). Detta S ∈ 2P una coalizione (per esempio, una compagnia aerea),
assegno ad essa un’utilità pari al costo della pista più lunga di cui necessita:
v(S) = max {cj : S ∩ Pj 6= ∅} .
Cosı̀ è definito un gioco Γ = (P, v) (la funzione caratteristica v non è super-additiva). Il
valore di Shapley è alquanto difficile da calcolare in base alla Definizione 5.16. È più semplice
procedere come segue:
• il costo c1 del primo tratto di pista è diviso tra tutti gli aerei di P ;
• il costo c2 − c1 del secondo tratto è diviso tra gli aerei del sottoinsieme ∪kj=2 Pj ;
• ...
• il costo ck − ck−1 dell’ultimo tratto è diviso tra gli aerei del sottoinsieme Pk .
Si dimostra che la ripartizione di costi cosı̀ ottenuta corrisponde a φ. Per esempio, se
P = {1, 2, 3} con P1 = {1, 2}, P2 = {3} e c1 = 1, c2 = 4, la tabella dei contributi marginali
è la seguente:
σ\i 1 2 3
123 1 0 3
132 1 0 3
213 0 1 3
231 0 1 3
312 0 0 4
321 0 0 4
Si ricava Sv(Γ) = (1/3, 1/3, 10/3).
6. Cenni sui giochi dinamici
Non si può discendere due volte nel medesimo fiume.
Eraclito
In questa sezione esponiamo alcuni elementi di teoria dei giochi dinamici, che sono caratterizzati dalla sequenzialità delle scelte dei vari giocatori (ved. Gibbons [14], Morgenstern &
von Neumann [28]). Questi giochi sono efficacemente rappresentati tramite grafi, pertanto
è utile richiamare alcune nozioni elementari relative a questi oggetti geometrici.
Definizione 6.1. Un grafo (semplice) è una coppia G = (V, E) dove V = {v1 , . . . vn }
(n ∈ N0 ) è un insieme non vuoto e
E ⊆ {e ∈ 2V : |e| = 2}
è un insieme di coppie non ordinate di elementi di V . Gli elementi di V sono detti vertici
di G, quelli di E sono detti lati. Se e = {v, w} è un lato, v e w ne sono gli estremi; se
e, f ∈ E, e 6= f , e ∩ f 6= ∅, e e f sono consecutivi. Se v, w ∈ V e {v, w} ∈ E, v e w sono
adiacenti.
Alcune nozioni relative ai grafi:
TEORIA DEI GIOCHI
47
Figura 4. Un albero.
Definizione 6.2. Siano G = (V, E) un grafo, v ∈ V : il grado di v è
deg(v) = {e ∈ E : v ∈ e}.
Se deg(v) = 0, v è detto vertice isolato. Una catena di estremi v, w ∈ V è un insieme
ordinato C = (e1 , . . . em ), dove m ∈ N0 , ei ∈ E, per ogni i ∈ {1, . . . m}, ei , ei+1 consecutivi
per ogni i ∈ {1, . . . m − 1}, v estremo di e1 , w estremo di em ; se v = w e i vertici intermedi
sono distinti a due a due, C è un ciclo; G è detto aciclico se non contiene cicli; G è connesso
se per ogni v, w ∈ V esiste una catena C che congiunge v e w. Un sotto-grafo di G è una
coppia G 0 = (V 0 , E 0 ) dove V 0 ⊆ V ed E 0 è l’insieme dei lati di G con gli estremi in V 0 .
Più sofisticata è la nozione di grafo orientato, in cui si adotta un ordine tra gli estremi di
un lato:
Definizione 6.3. Un grafo orientato è una coppia G = (V, E) dove V = {v1 , . . . vn } (n ∈ N0 )
è un insieme non vuoto e E ⊆ V × V . Una catena di estremi v, w ∈ V è un insieme ordinato
C = (e1 , . . . em ), dove m ∈ N0 , ei ∈ E, per ogni i ∈ {1, . . . m}, ei , ei+1 consecutivi per
ogni i ∈ {1, . . . m − 1}, v primo estremo di e1 , w secondo estremo di em . Se G è un grafo
orientato, su V è definita una relazione d’ordine mediante la legge
v w se esiste una catena C di estremi v e w..
La classe più studiata di grafi (ved. Fig. 4):
Definizione 6.4. Un albero è un grafo orientato, connesso, aciclico. Se G è un albero, un
sotto-albero è un sotto-grafo G 0 = (V 0 , E 0 ) t.c.
V 0 = {v0 } ∪ {v ∈ V : v0 v},
dove v0 ∈ V .
Richiamando la Definizione 1.1 e la susseguente discussione, definiamo un gioco dinamico
(deterministico, non-cooperativo) come l’interazione tra due o più decisori razionali e
intelligenti (giocatori), che effettuano le loro scelte (mosse) in una sequenza temporale
48
A. IANNIZZOTTO
prefissata; ogni giocatore, quando effettua ogni sua mossa, è informato di tutte le mosse
precedenti sue e degli altri giocatori e delle loro conseguenze (informazione completa); ai
giocatori è vietato stringere accordi vincolanti. Una strategia, per un giocatore, è una
sequenza di mosse condizionate dalle mosse degli altri giocatori.
Un gioco di questo genere si suole rappresentare in forma estesa (ved. Kuhn & Tucker [22]):
denotiamo il gioco con Γ e definiamo l’insieme dei giocatori P = {P1 , . . . Pn } (n ∈ N0 ) e
quello degli stati del gioco S = {s1 , . . . sm } (m ∈ N0 ). Sull’insieme degli stati è definito un
ordine parziale (relazione transitiva e antisimmetrica). Uno stato s ∈ S è detto iniziale
se non esiste t ∈ S t.c. t s (l’insieme degli stati iniziali è denotato Si ) e finale (o esito) se
non esiste t ∈ S t.c. s t (l’insieme degli stati finali è denotato Se ), altrimenti è un turno.
Ogni giocatore Pi (1 ≤ i ≤ n) dispone di una preferenza sull’insieme Se (ved. Definizione
1.2), e per il Teorema 1.5 anche di una funzione di utilità ui : Se → R. Una mossa è una
coppia ordinata (s, t) ∈ S × S t.c.
(i) s t;
(ii) non esiste u ∈ S t.c. s u t.
Una storia è una sequenza finita di stati (s1 , . . . sk ) (k ∈ N0 è detto lunghezza) t.c.
s1 s2 . . . sk .
Una storia è detta conclusa se sk ∈ Se . Elenchiamo di seguito gli assiomi che saranno
adottati nella presente discussione:
• lo stato iniziale s0 è unico;
• per ogni stato finale s ∈ Se esiste un’unica storia che congiunge s0 con s (la lunghezza
di questa storia è detta altezza di s);
• esiste una regola di turno, ovvero una funzione τ : S \ Se → P che associa a ogni
stato il giocatore a cui spetta muovere.
Sotto queste ipotesi, un gioco si può rappresentare mediante un grafo G = (S, E), dove E è
l’insieme delle mosse consentite.
Proposizione 6.5. Se Γ è un gioco e G il grafo che lo rappresenta, allora G è un albero.
Esempio 6.6. Nel gioco dei fiammiferi due giocatori P , Q tolgono a turno quanti fiammiferi
vogliono da uno di due gruppi originariamente di 2 fiammiferi ciascuno, posti su un tavolo;
vince il primo che lascia il tavolo vuoto. Sia P il primo a muovere. L’albero che rappresenta
questo gioco ha 6 foglie, cioè vi sono 6 esiti, 3 dei quali favorevoli a P e 3 a Q.
Il concetto di equilibrio di Nash si può applicare anche ai giochi dinamici, ma risulta
insoddisfacente:
Esempio 6.7. Il gioco dell’entrata è un modello molto generale che abbraccia il seguente caso:
un produttore P deve decidere se introdursi (i) oppure no (o) in un mercato monopolizzato
da un altro produttore Q; questi può reagire aggressivamente (a), abbassando i prezzi e
infliggendo una perdita a sé oltre che al concorrente, oppure pacificamente (p), dividendo il
mercato con P . Rappresentando questo gioco Γ in forma strategica, otteniamo la seguente
TEORIA DEI GIOCHI
49
tabella dei pay-off:
P \Q a
p
i
(−2, 5) (6, 6)
o
(0, 8)
(0, 12)
Si ha Ne(Γ) = {(i, p), (o, p)}, conclusione insoddisfacente perché (o, a) corrisponde a un
comportamento irrazionale di Q. L’intuizione suggerisce che si dovrebbe avere solo (i, p)
come equilibrio.
Il modo più semplice per ’risolvere’ un gioco dinamico è quello basato sul metodo di induzione
a ritroso (o algoritmo di Zermelo-Kuhn): si tratta di un procedimento finalizzato a eliminare,
in un numero finito di passi, tutte le mosse irrazionali di tutti i giocatori; quello che resta è
l’unione delle storie razionali, che conduce alle soluzioni del gioco.
Sia Γ un gioco:
• scegliamo uno stato finale s di altezza massima;
• determiniamo lo stato immediatamente precedente t ∈ S e l’insieme T degli stati
immediatamente successivi a t (tra cui s);
• detto Pi (1 ≤ i ≤ n) il giocatore che muove in t, determiniamo s0 ∈ T t.c.
ui (s0 ) = max ui ;
T
• definiamo un nuovo gioco Γ0 eliminando tutti gli stati di T e attribuendo a t un’utilità
per Pi uguale a ui (s0 );
• ripetiamo il procedimento partendo da t (che è uno stato finale di Γ0 );
• ...
• raggiungiamo lo stato iniziale s0 .
Attraverso questo procedimento si determina una storia soddisfacente la seguente definizione:
Definizione 6.8. Un equilibrio perfetto nei sottogiochi per il gioco Γ è una storia completa
C = (s0 , s1 , . . . sp ) (p ∈ N0 ) t.c. per ogni 0 ≤ j ≤ p − 1 la mossa migliore per il giocatore
che gioca in sj è (sj , sj+1 ). L’insieme degli equilibri perfetti nei sottogiochi di Γ è indicato
con spe(Γ).
Il procedimento di induzione a ritroso fornisce una dimostrazione costruttiva del seguente
Teorema di Selten:
Teorema 6.9. Se Γ è un gioco dinamico a informazione completa con un insieme finito di
stati, allora spe(Γ) 6= ∅.
In generale tale soluzione non è unica, poiché in qualche stato possono darsi due o più mosse
ottimali equivalenti per un giocatore. Nel gioco dell’Esempio 6.6, vi sono 2 equilibri perfetti
nei sottogiochi, entrambi favorevoli a Q. Nel gioco dell’Esempio 6.7, si ha spe(Γ) = {(i, p)}.
Se nell’Esempio 3.3 stabiliamo un turno e aggiungiamo l’ipotesi di informazione completa,
otteniamo spe(Γ) = {(t, t)}.
50
A. IANNIZZOTTO
Esempio 6.10. Sia Γ un gioco con 2 giocatori P , Q e due mosse, rappresentato dalla
seguente tabella dei pay-off:
P \Q y1
y2
x1
(2, 1) (0, 0)
x2
(1, 2) (1, 2)
Si ha Ne(Γ) = {(x1 , y1 ), (x2 , y2 )}. Supponendo che P giochi per primo, si può procedere
per induzione a ritroso e ricavare spe(Γ) = {(x1 , y1 )}. L’altro equilibrio (x2 , y2 ) si può
interpretare come effetto di una ’minaccia di ritorsione’ da parte di Q: esso comporta una
scelta, da parte di P , non ottimale (ma solo perché la minaccia gli preclude l’esito migliore).
Dal punto di vista della razionalità individuale, questa minaccia non è credibile, in quanto
implica la disponibilità da parte di Q a danneggiare se stesso (nella realtà la faccenda è
diversa, come provano i terroristi suicidi).
Si noti che un equilibrio perfetto nei sottogiochi non sempre è un equilibrio di Nash per la
versione ’statica’ del gioco:
Esempio 6.11. Sia Γ un gioco con 2 giocatori P , Q e due mosse, rappresentato dalla
seguente tabella dei pay-off:
P \Q y1
y2
x1
(2, 1) (0, 0)
x2
(3, 0) (1, 1)
Si vede facilmente che Ne(Γ) = {(x2 , y2 )}. Se inseriamo una regola di turno per cui P gioca
per primo, otteniamo spe(Γ) = {(x1 , y1 )}.
Il modello dei giochi dinamici si può generalizzare indebolendo l’ipotesi di informazione
completa. Può verificarsi che alcuni stati del gioco s1 , . . . sk (k ∈ N0 ), nei quali è di turno
sempre lo stesso giocatore Pi (1 ≤ i ≤ n), siano per tale giocatore indistinguibili: si
parla allora di informazione incompleta e l’insieme {s1 , . . . sk } è detto insieme informativo.
Coerentemente, le mosse a disposizione di Pi in ognuno degli stati che formano lo stato
informativo sono le stesse (esse però conducono a esiti diversi a causa di quelle informazioni
che Pi ignora).
L’impasse si risolve introducendo una distribuzione di probabilità sull’insieme informativo
(ved. Definizione 3.4): se la probabilità di sj secondo Pi è xj , con 0 ≤ xj ≤ 1 per ogni
j ∈ {1, . . . k} e
k
X
xj = 1,
j=1
e se uj (definita sull’insieme degli stati finali raggiungibili da sj ) è l’utilità per Pi subordinata
allo stato sj , allora Pi fa la sua scelta in modo da massimizzare l’utilità mista
u=
k
X
j=1
xj uj .
TEORIA DEI GIOCHI
51
Esempio 6.12. Considero un gioco con due giocatori P , Q: P gioca per primo scegliendo
tra due mosse {a, b}; se sceglie a raggiunge uno stato finale con utilità (1, 3); se sceglie b, P
deve fare un’altra mossa da scegliere in {c, d}, ma all’oscuro di Q; quindi gioca Q, che può
scegliere in {e, f } con la seguente tabella dei pay-off:
P \Q e
f
c
(3, 2) (0, 0)
d
(2, 2) (−1, 1)
Sia 0 ≤ x ≤ 1 la probabilità, secondo Q, che P abbia scelto c al secondo stadio (dunque
1 − x è la probabilità che abbia scelto d). Allora Q deve massimizzare l’utilità v data da
v(e) = 2x + 2(1 − x) = 2,
v(f ) = 0x + 1(1 − x) = 1 − x.
Qualunque sia x, Q sceglie e. Dunque P , alla sua seconda mossa, può attribuire le utilità
u(c) = 3, u(d) = 2 e sceglie c. Risalendo allo stato iniziale del gioco, P sceglie b e i pay-off
finali sono (3, 2).
Quando si introducono le probabilità, però, bisogna tenere conto delle valutazioni di tutti i
giocatori: infatti, in base alla propria intelligenza e alla razionalità degli altri, ogni giocatore
modifica le sue valutazioni in base alle mosse che ha osservato. Per studiare questo tipo
di giochi si adopera l’approccio bayesiano, che è basato sulle probabilità condizionate e sul
metodo di induzione a ritroso. Tale approccio non sarà qui trattato, ma il seguente Esempio
6.19 ne fornisce un assaggio.
6.1. Esempi. Presentiamo infine alcuni esempi di giochi dinamici, sia in regime di informazione completa che di informazione incompleta.
Esempio 6.13. Nel gioco dell’ultimatum, su un tavolo ci sono 100 monete; il giocatore P
fa una proposta di spartizione al giocatore Q (in cui ognuno riceva almeno una moneta,
cioè da 1 a 99); se questi accetta (a), si procede secondo la proposta; se rifiuta (r), nessuno
prende monete. Si ha spe(Γ) = {(99, 1)}, il che dimostra come il concetto di equilibrio sia
spesso in contrasto con l’esperienza.
Esempio 6.14. Nel gioco dei pirati, 5 pirati devono dividere un bottino di 1000 dobloni
secondo il seguente procedimento: il pirata P1 fa la sua proposta e la mette ai voti, se
ottiene la maggioranza il bottino viene diviso secondo la sua proposta, altrimenti P1 viene
ucciso; P2 fa la sua proposta... Questo enigma si risolve per induzione a ritroso:
•
•
•
•
•
P5 , rimasto solo, prende i 1000 dobloni per sé;
P4 non può garantirsi il voto di P5 e muore;
P3 offre 1 doblone a P4 e ne conserva 999;
P2 offre 2 dobloni a P4 e 1 a P5 e ne conserva 997;
P1 offre 2 dobloni a P5 e 1 a P3 e ne conserva 997.
Inaspettatamente, P1 può risolvere il problema in modo molto vantaggioso.
52
A. IANNIZZOTTO
Esempio 6.15. Il modello di Stackelberg è quasi identico a quello dell’Esempio 3.18, la sola
differenza essendo che P ha una posizione dominante, cioè ’gioca per primo’. Dunque P
sceglie la sua strategia x sapendo che Q risponderà con la strategia condizionata
y(x) =
a−c−x
.
2
Dunque P opera in modo tale da massimizzare il proprio pay-off f : [0, a] → R, definito da
f (x) = f (x, y(x)) =
(a − c)x − x2
.
2
L’equilibrio raggiunto è
a−c
a−c
, y=
.
2
4
Osserviamo che la posizione dominante di P distorce il mercato, consentendogli un maggior
profitto a danno di Q, ma a vantaggio dei consumatori (il prezzo è più basso).
x=
Esempio 6.16. La corsa agli sportelli è un modello usato per interpretare le crisi di fiducia
che talvolta colpiscono il mercato finanziario. Siano 0 < s < d < r numeri reali. Due
investitori P , Q hanno depositato in banca ciascuno una somma d, che la banca ha investito
in parte; al tempo I, la banca dispone di una somma 2s, mentre al tempo II, giunto a
maturazione l’investimento, essa dispone di una somma 2r. Gli investitori possono scegliere
se prelevare (p) o lasciare (l) al tempo I, con i seguenti pay-off:
P \Q p
l
p
(s, s)
(d, 2s − d)
l
(2s − d, d) (rinvio)
oppure al tempo II, con i seguenti pay-off:
P \Q p
l
p
(r, r)
(2r − d, d)
l
(d, 2r − d) (r, r)
Il gioco al tempo II ha un solo equilibrio di Nash (p, p), quindi al tempo I attribuisco (r, r)
come pay-off della coppia di strategie (l, l) che pertanto diventa anch’essa equilibrio di Nash.
Procedendo per induzione a ritroso, si ha lo stesso risultato: l’unico equilibrio perfetto nei
sottogiochi è la storia in cui P e Q lasciano al tempo I e prelevano al tempo II.
Esempio 6.17. Nel gioco del ’prendere o lasciare’ (detto anche gioco del millepiedi per la
caratteristica forma del grafo associato), due giocatori P , Q scelgono a turno se prendere
(p) o lasciare (l) un premio che inizialmente vale 1 e poi cresce di 1 a ogni turno fino a un
valore k (k ∈ N0 pari); se dopo k turni il premio è ancora intatto, viene diviso in parti eguali.
Comincia P . L’induzione a ritroso fornisce un unico equilibrio perfetto nei sottogiochi,
corrispondente alla scelta da parte di P di prendere al primo turno. Tuttavia questo
equilibrio è lungi dall’essere ottimale. Questo esempio mostra come il metodo dell’induzione
a ritroso possa anche condurre a dei paradossi.
TEORIA DEI GIOCHI
53
Esempio 6.18. Riprendiamo in esame il gioco dell’Esempio 3.3, supponendo che P giochi
per primo e Q giochi ignaro della scelta di P . Sia 0 ≤ x ≤ 1 la probabilità che P abbia
taciuto secondo Q, allora Q confronta le utilità
v(t) = −1x − 10(1 − x) = 9x − 10,
v(c) = 0x − 5(1 − x) = 5x − 5
e sceglie sempre c in quanto v(c) > v(t) per ogni x ∈ [0, 1]. P , al momento di scegliere, lo sa:
quindi deduce le proprie utilità che sono u(t) = −10, u(c) = −5 e sceglie c. Si noti che la
soluzione è identica a quella dell’Esempio 3.3: infatti, l’incertezza rende irrilevante l’ordine
delle mosse.
Esempio 6.19. Esaminiamo un semplice gioco di carte con due giocatori P , Q. All’inizio
entrambi puntano 1; poi P pesca una carta da un mazzo ordinario e la guarda; P sceglie
tra due opzioni, f (fold) e r (raise): se sceglie f , mostra la carta e prende il banco se la
carta è rossa, mentre se è nera lo prende Q; se sceglie r, aggiunge 1 e lascia la carta coperta;
ora gioca Q, che ha pure due scelte, m (meet) e p (pass): se sceglie p rinuncia e P prende il
banco, se sceglie m punta 1 e scopre la carta, e anche in questo caso il banco va a P se la
carta è rossa e a Q se è nera. Gli stati che seguono alla scelta f da parte di P formano un
insieme informativo per Q, che deve scegliere in condizioni di incertezza.
Secondo Q, la probabilità che la carta coperta sia rossa è x ∈ [0, 1] (quindi la probabilità che
sia nera è 1 − x). Allora le utilità ponderate di Q sono date dalla funzione v : {m, p} → R
definita da
v(m) = −2x + 2(1 − x) = 2 − 4x,
v(p) = −x − (1 − x) = −1.
A questo punto è chiaro che Q sceglie m se 0 ≤ x < 3/4, è indifferente se x = 3/4 e sceglie
p se 3/4 < x ≤ 1. In particolare, se x = 1/2, la scelta di Q è sempre m. In questo caso si
può procedere per induzione a ritroso: le utilità di P al momento della sua mossa sono
u(r) = 2, u(f ) = 1 se la carta è rossa,
u(r) = −2, u(f ) = 1 se la carta è nera.
Dunque, P sceglie r se la carta è rossa e f se è nera. Si potrebbe osservare che, a questo
punto, Q, che gioca dopo P , può dedurre il colore della carta dalla mossa di P : se P sceglie
r la carta è rossa e a Q conviene scegliere p; se P sceglie f la carta è nera e a Q conviene
scegliere m.
54
A. IANNIZZOTTO
Riferimenti bibliografici
[1] J.P. Aubin, Mathematical methods of game and economic theory, North-Holland (1979). 2, 19
[2] J.P. Aubin, H. Frankowska, Set-valued analysis, Birkhäuser (2008). 7
[3] É. Borel, La théorie du jeu et le équations intégrales à noyau symétrique, C.R. Hebdomadaires des
Séances de l’Academie des Sciences 173 (1921) 1304-1308. 2
[4] R. Brânzei, J. Morgan, V. Scalzo, S. Tijs, Approximate fixed point theorems in Banach spaces
with applications in game theory, J. Math. Anal. Appl. 285 (2003) 619-628. 16, 26
[5] F. Browder, On a new generalization of the Schauder fixed point theorem, Math. Ann. 174 (1967)
285-290. 16
[6] E. Burger, Introduzione alla teoria dei giochi, Franco Angeli (1967). 2
[7] A. Cellina, Approximation of set valued functions and fixed point theorems, Ann. Mat. Pura Appl.
82 (1969) 17–24. 15
[8] K.C. Chang, Variational methods for nondifferentiable functionals and their applications to partial
differential equations, J. Math. Anal. Appl. 80 (1981) 102-129. 7
[9] V. Checcucci, A. Tognoli, E. Vesentini, Lezioni di topologia generale, Feltrinelli (1982). 12, 18
[10] F. Colombo, Introduzione alla teoria dei giochi, Carocci (2008). 2, 19, 35
[11] M. Fabian, P. Hamala, P. Hájek, V. Montesinos, V. Zizler, Banach space theory, Springer
(2011). 17
[12] K. Fan, Applications of a theorem concerning sets with convex sections, Math. Ann. 163 (1966)
189-203. 32
[13] A.F. Filippov, A differential equation with discontinuous right hand side, Math. Sbornik 54 (1960)
99–128. 7
[14] R. Gibbons, Teoria dei giochi, Il Mulino (1992). 2, 19, 46
[15] I.L. Glicksberg, A further generalization of the Kakutani fixed point theorem, with applications to
Nash equilibrium points, Proc. Amer. Math. Soc. 3 (1952) 170-174. 16
[16] A. Granas, J. Dugundji, Fixed point theory, Springer (2003). 14, 15, 16, 17, 18
[17] S. Kakutani, A generalization of Brouwer’s fixed point theorem, Duke Math. J. 8 (1941) 457-459. 15,
33
[18] B. Knaster, C. Kuratowski, S. Mazurkiewicz, Ein Beweis des Fixpunktsatzes für n-dimensionale
Simplexe, Fund. Math. 14 (1926). 17
[19] H. König, A general minimax theorem based on connectedness, Arch. Math. (Basel) 59 (1992) 55-64.
15, 33
[20] E. Krein, A.C. Thompson, Theory of correspondences, Wiley (1984). 7
[21] D.M. Kreps, Notes on the theory of choice, Westview Press (1988). 3
[22] H.W. Kuhn, A.W. Tucker (Eds.), Contributions to the theory of games, Princeton University
Press (1953). 2, 48, 55
[23] J.C.C. McKinsey, Introduction to the theory of games, Rand (1952). 2
[24] E. Michael, Continuous selections I, Ann. of Math. 63 (1956) 361–382. 12
[25] E. Michael, Continuous selections II, Ann. of Math. 64 (1956) 562–580. 12
[26] E. Michael, Continuous selections III, Ann. of Math. 65 (1956) 375–390. 12
[27] O. Morgenstern, Teoria dei giochi, Bollati Boringhieri (1969). 2, 35
[28] O. Morgenstern, J. von Neumann, Theory of games and economic behavior, Princeton (1953). 2,
46
[29] J. Nash, Non-cooperative games, Ann. Math. 54 (1951) 286–295. 5, 21
[30] B. Ricceri, Some topological mini-max theorems via an alternative principle for multifunctions, Arch.
Math. (Basel) 60 (1993) 367–377. 2, 34
[31] B. Ricceri, S. Simons (eds.), Minimax theory and applications, Kluwer (1998). 28
[32] J.D. Rossi, Tug-of-war games and PDEs, Proc. Roy. Soc. Edinburgh Sect. A 141 (2011) 319–369. 2, 34
[33] W. Rudin, Functional analysis, McGraw-Hill (1991). 14
TEORIA DEI GIOCHI
[34]
[35]
[36]
[37]
55
R. Scozzafava, Incertezza e probabilità, Zanichelli (2001). 20
L.S. Shapley, A value for n-person games, in [22]. 41
J. von Neumann, Zur Theorie der Gesellschaftsspiele, Math. Ann. 100 (1928) 295-320. 2, 31
E. Zermelo, Uber die Anwendung der Mengenlehre auf die Theorie des Schachspiels, Proceedings of
the Fifth International Congress of Mathematicians (1913) 501-504. 2
Dipartimento di Matematica e Informatica
Università degli Studi di Cagliari
Viale L. Merello 92, 09123 Cagliari, Italy
E-mail address: [email protected]