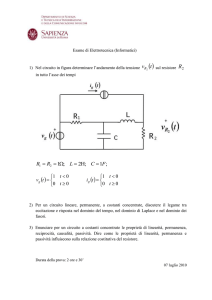
TRASFORMATE DI LAPLACE
La trasformata di Laplace consente di trasformare le equazioni differenziali
in equazioni algebriche semplificando l’analisi dei circuiti dinamici lineari.
Il metodo della trasformata di Laplace generalizza il metodo dei fasori:
anziché calcolare la risposta permanente ad ingressi sinusoidali, con la
trasformata di Laplace possiamo ricavare la risposta completa ad una
classe di ingressi molto più generale che oltre alle sinusoidi include il
gradino, la rampa, l’esponenziale e gli impulsi.
Come nel caso dei fasori si ottiene un circuito simbolico descritto da
equazioni algebriche nella variabile di Laplace s al quale possono essere
applicate le tecniche viste per i circuiti resistivi.
1
L’unicità tra f(t) e F(s) permette di risolvere vari problemi in
questo modo:
Dominio del tempo
Dominio di s
Trasformazione
Descrizione del circuito nel nel dominio di s
dominio del tempo in termini
di equazioni differenziali
Descrizione del circuito nel
dominio di s in termini di
equazioni algebriche
Risoluzione
delle equazioni
algebriche
Risoluzione
delle equazioni
differenziali
Soluzione nel dominio
del tempo
Soluzione del dominio
di s
Trasformazione
nel dominio del
tempo
DEFINIZIONE DI L-TRASFORMATA
Sia f(t): f (t ) = 0 per t ≤ 0
La L − trasformata di f(t) e':
s=σ+jω [s-1] frequenza complessa
∞
F (s) = L[ f (t )] = ∫ f (t ) ⋅ e−st dt
0
t>0 trasformata unilatera.
(Nella bilatera si integra da –∞ a +∞)
−
Esempio: f (t ) = u(t ) = δ −1 (t )
∞
∞
e−st
U (s) = L[u(t )] = ∫ u(t ) ⋅ e dt = ∫ e dt =
−s
0−
0−
−st
∞
−st
0−
1 1
= 0+ =
s s
N.B. Si utilizza 0- per essere certi di includere qualunque discontinuità in t=0
2
[
∞
]
∞
L e δ −1 (t ) = ∫ e e dt = ∫ e
− at
0
a>0
[
− at − st
]
( − a − s )t
0
∞
∞
1 ( − a − s )t
dt =
e
a−s
L t e δ −1 (t ) = ∫ t e e dt = ∫ t e
−
n at
n at − st
0
n ( a − s )t
0
∞
=
0
1
s−a
∞
t n e ( a − s )t
dt =
a−s
[
∞
+
0
]
n
n
n −1 ( a − s ) t
t
e
dt
=
0
−
0
+
L t n −1e ( a − s ) t =
∫
a−s 0
s−a
[
]
[
]
n(n − 1) n −2 ( a − s ) t
n!
Lt e
=
L e ( a − s )t =
2
n
( s − a)
( s − a)
n!
( s − a ) n +1
In generale la L - trasformat a è definita se l' integrale converge ad un valore finito.
Essendo | e jωt |= 1, ∀t , l' integrale converge quando ω
∞
∫
f (t ) e −σt dt < ∞
0
per qualche valore reale σ = σ c
σ c > 0 e' detta ascissa di convergenza
La regione di convergenza è ℜe{s} = σ > σ c
σc
σ
NOTA : L' ipotesi che f(t) = 0 per t < 0 e' necessaria per garantire
la unicità della L - Trasformat a
Proprietà di unicità: se f1 e f2 hanno la stessa L-trasformata, allora deve
essere f1=f2 per t>0
f (t ) ⇔ F ( s )
3
La anti − trasformata di F (s) e':
σ + j∞
1 0
f (t ) = L [F (s)] =
F (s) ⋅ est ds
∫
j 2π σ 0 − j∞
−1
ω
σ0 > σc
σc
σ0
σ
Non verrà utilizzata, ma si ricorrerà alle tabelle
(vedi libro per tabelle delle trasformate più utilizzate)
PROPRIETA’ DELLE L-TRASFORMATE
LINEARITA' : L[c1 f1 (t ) + c2 f 2 (t )] = c1 F1 ( s ) + c2 F2 ( s)
deriva dalla linearità dell' integrale
e jωt − e − jωt 1 1
1
=
−
Es : L[sin ωt ] = L
=
j
j
s
j
s
j
2
2
−
+
ω
ω
1 2 jω
ω
=
= 2
2
2
s + ω2
2 j s +ω
Essendo
L e −at = 1
s+a
[ ]
4
SCALING : L[ f ( at )] =
1 s
F( )
a a
∞
L[ f ( at )] = ∫ f (at )e − st dt
0
Posto x = at → dx = adt, t = x/a
∞
1
1 s
f ( x)e −( s / a ) x dx = F
∫
a0
a a
ω
Es : Essendo L[sin (ωt )] = 2
s + ω2
1
ω
L[sin (2ωt )] =
2 (s / 2 )2 + ω 2
L[ f ( at )] =
df (t )
= sF ( s ) − f (0 − )
DERIVATA : L
dt
∞
dimostrazione : F(s) = ∫
0
f(t)e − st
f(t)e dt =
−s
∞
-st
+
0
1
f( 0 ) L[ f ' (t )]
+ ∫ f ' (t)e-st dt = 0 +
+
⇒ L[ f ' (t )] = sF ( s ) − f (0 − )
s
s
s0
∞
∫ udv = uv − ∫ vdu
f (t ) = u
− st
dv = e dt ; du = f ' (t )dt
1
→ v = − e − st
s
Esempio : IMPULSO
1
dδ (t )
L[δ (t )] = L −1 = s ⋅ = 1
s
dt
5
d 2 f (t )
df −
2
−
DERIVATA DI ORDINE L
= s F ( s) − sf (0 ) − (0 )
2
dt
dt
SUPERIORE
d 2 f (t )
df
df (t ) df −
dim. :
− (0 ) = s sF ( s) − f (0 − ) − (0 − )
= sL
2
dt
dt dt
dt
[
]
d k f (t )
d k −1 f −
k
k −1
k − 2 df
−
−
L
s
F
s
s
f
s
=
(
)
−
(
0
)
−
(
0
)
−
...
−
(0 )
k
k −1
dt
dt
dt
t
F ( s)
INTEGRALE : L ∫ f(τ)dτ =
s
0
t
1
1
Esempio : RAMPA L[t ] = L ∫ δ −1 (τ )dτ = 2
s 0
s
1 1
t 2 1 t
1
Ex.L = L ∫ τdτ =
= 3
2
s
2 s 0
ss
2
→ L t2 = 3
s
n!
L t n = n +1
s
[ ]
[ ]
6
TEOREMA DELLA TRASLAZIONE NEL TEMPO :
L[ f (t − τ )] = e −τ ⋅s F ( s )
Esempio:
f (t ) = 3[δ −1 (t ) − δ −1 (t − 2)]
F ( s) =
3 3e − 2 s
−
s
s
TEOREMA DEL VALORE INIZIALE :
∞
df
df
sF ( s ) − f (0 ) = L = ∫ e − st dt
dt 0 dt
−
∞ df − st
lim sF ( s ) − f (0 ) = lim ∫ e dt
s →∞
s →∞
0 dt
lim sF ( s ) − f (0 − ) = 0
[
s →∞
−
[
]
]
f (0 − ) = lim [sF ( s )]
s →∞
TEOREMA DEL VALORE FINALE :
f(∞) = lim sF ( s )
s→0
7
Ingresso impulsivo
Le L-trasformate permettono anche lo studio di segnali non
rappresentabili da funzioni nel senso “classico” del termine. Si
tratta in tal caso di distribuzioni
δ −1a (t )
Esempio: Impulso di Dirac δ (t )
a
1
a
δ a (t )
1/a
d
dt
a
0
0
δ −1 (t )
1
δ (t )
d
dt
a
Ingresso impulsivo (Cnt.)
∞
∫δ
a (t )dt
=1
∀a
0
1 1 1 1 − as 1 − e − as
⋅ − ⋅ e
=
as
a s a s
1 − e − as
se − as
= lim
=1
L[δ (t )] = lim L[δ a (t )] = lim
a →0
a →0
a →0
as
s
L[δ a (t )] =
8
ANTI-TRASFORMAZIONE DI FUNZIONI RAZIONALI
1. Scomporre H(s) in termini semplici mediante l’espansione in frazioni
parziali
2. Det. l’antitrasformata di ciascun termine
Se H(s) è impropria (grado del num. maggiore del grado del den.),
applicare prima la divisione dei polinomi
H ( s ) = k n s n + k n −1s n −1 + ... + k1s + k0 +
{
}
R(s)
D( s)
L−1 k n s n + k n −1s n −1 + ... + k1s + k0 = k nδ n + k n −1δ n −1 + ... + k1δ 1 + k0δ (t )
dove δ n =
d nδ (t )
dt n
La scomposizione in frazioni parziali si applica a F(s)=R(s)/D(s).
ANTI-TRASFORMAZIONE DI FUNZIONI RAZIONALI
Scomporre F in termini semplici mediante l’espansione in frazioni parziali
Det. l’antitrasformata di ciascun termine
Sia
N ( s ) bm s m + ⋅ ⋅ ⋅ + b1s + b0
F ( s) =
=
D( s ) an s n + ⋅ ⋅ ⋅ + a1s + a0
D(s) = ( s − p1 ) ⋅ ( s − p2 ) ⋅ ⋅ ⋅ ( s − pn )
Caso1) poli semplici
con pi ≠ p j
allora : F ( s ) =
m<n
se i ≠ j
N (s)
R1
Rn
=
+ ⋅⋅⋅ +
( s − p1 ) ⋅ ⋅ ⋅ ( s − pn ) ( s − p1 )
( s − pn )
Ri : residui
Ri
pi t
L−1
= Ri e δ −1 (t )
( s − pi )
9
Calcolo dei residui
R ( s − p2 ) ⋅ ⋅ ⋅ ( s − pn ) + ⋅ ⋅ ⋅ + Rn ( s − p2 ) ⋅ ⋅ ⋅ ( s − pn −1 )
a) → F ( s ) = 1
( s − p1 ) ⋅ ⋅ ⋅ ( s − pn )
eguagliand o i coefficienti in termini di R i ai coefficien ti bi
si ottengono n equazioni in n incognite
Calcolo dei residui
b) → ( s − pi ) ⋅ F ( s ) = Ri + ∑ ( s − pi ) ⋅
i≠ j
Rj
(s − p j )
Ri = lim ( s − pi ) ⋅ F ( s )
s → pi
ANTITRASFORMAZIONE DI FUNZIONI RAZIONALI (Cnt.)
Esempio :
p1 = 0 ;
F (s) =
8+ s
8+ s
R1
R2
=
=
+
s 2 + 2 s s ( s + 2) s s + 2
p 2 = −2
8+ s 8
= =4
s →0
s →0 s + 2
2
8+ s
6
R2 = lim ( s + 2) ⋅ F ( s ) = lim
=
= −3
s → −2
s → −2
s
−2
4
3
F ( s) = −
s s+2
f (t ) = 4 − 3e − 2t δ −1 (t )
R1 = lim s ⋅ F ( s ) = lim
(
)
10
Nel caso di poli complessi essi sono presenti
in coppie coniugate :
p1 = σ 1 + jϖ 1 ;
*
p2 = σ 1 − jϖ 1 = p1
*
I residui sono : → R1 = u1 + jv1 ;
R2 = u1 − jv1 = R1
*
F (s) =
R1
R1
+
s − p1 s − p1*
2
2
se M = 2 u1 + v1 ; ϕ = arctg
F (s) =
M
2
L−1 [F ( s )] =
v1
u1
e jϕ
e − jϕ
+
*
s − p1 s − p1
[
]
*
M p1t + jϕ
e
+ e p1 t − jϕ δ −1 (t ) =
2
[
]
M σ 1t + j (ϖ 1t +ϕ ) σ 1t − j (ϖ 1t +ϕ )
e
+e
δ −1 (t ) =
2
= Meσ1t cos(ϖ 1t + ϕ )δ −1 (t )
=
ANTITRASFORMAZIONE DI FUNZIONI RAZIONALI
Caso2) Poli Multipli
Hp. : su n poli ve ne sono k distinti
k
N ( s)
con D(s) = ( s − p1 ) n1 ⋅ ⋅ ⋅ ⋅( s − pk ) nk con ∑ ni = n
D(s)
i =1
k
Ri , ni
Ri ,1
Ri , 2
F ( s) = ∑
+
+ ⋅⋅⋅⋅ +
ni
ni −1
( s − pi )
( s − pi )
i =1 ( s − pi )
Sia F ( s ) =
Si dimostra che :
Ri , j =
1 d j −1
j −1 ( s − pi ) F ( s )
( j − 1)! ds
s= p
i
Si noti che :
Ri , j
t ni − j e pit
L−1
=
R
i, j
ni − j +1
(ni − j )!
( s − pi )
11
PRODOTTO DI CONVOLUZIONE
Date due funzioni f1(t) e f 2(t), si definisce prodotto integrale o
prodotto di convoluzione :
t
f 3(t) =
∫ f (τ) ⋅ f (t − τ)dτ = f (t) ∗ f (t)
1
2
1
2
0
TEOREMA :
La trasformata di Laplace del prodotto di convoluzione e' uguale
al prodotto delle trasformate di Laplace delle funzioni
F3 ( s) = F1 ( s) ⋅ F2 ( s)
ANALISI CIRCUITALE
I calcoli sono effettuati nell’ambito della teoria delle
distribuzioni in modo da includere l’eventuale presenza di
distribuzioni singolari nell’origine
Le condizioni iniziali sono sempre le variabili di stato in 0Tutte le F(s) possono essere anti-trasformate
Non e’ necessario ricavare la relazione I/O ma si possono
scrivere le equazioni topologiche e dei componenti nel
dominio di s
12
EQUAZIONI DEI COMPONENTI
I(s)
Generatore Indipendente
di tensione
V(s)
Hp: v(t) L-trasformabile
(b)
Generatore Indipendente
di corrente
A(s)
a(t)
Hp: a(t) L-trasformabile
(b)
Resistore
v(t ) = R ⋅ i (t ) ⇒ V ( s ) = R ⋅ I ( s )
i (t ) = G ⋅ v(t ) ⇒ I ( s) = G ⋅ V ( s )
i(t)
Generatore di tensione
pilotato in corrente
I(s)
u(t)
U(s)
(a)
v(t)
(b)
a(t)
V(s)
u (t ) = r ⋅ i (t ) ⇒ U ( s ) = r ⋅ I ( s)
Generatore di corrente
pilotato in tensione
A(s)
a(t ) = g ⋅ v(t ) ⇒ A( s ) = g ⋅ V ( s )
13
i1(t)
Trasformatore ideale
i2(t)
n:1
v1(t)
v2(t)
I1(s)
I2(s)
n:1
V1(s)
V2(s)
i1(t)
v1(t)
0
∞
V1 ( s ) = n ⋅ V2 ( s )
I ( s) = − 1 ⋅ I ( s)
2
1
n
Nullore
i2(t)
I1(s)
V1(s)
v1 (t ) = n ⋅ v2 (t )
i (t ) = − 1 ⋅ i (t )
2
1
n
v2(t)
v1 (t ) = 0
i1 (t ) = 0
I2(s)
0
∞
V2(s)
V1 ( s ) = 0
I1 ( s ) = 0
14
Condensatore
dv
i (t ) = C ⋅
dt
v(0 − ) = V0
V (s) =
I ( s ) V0
I ( s ) = sC ⋅ V ( s ) − C ⋅ V0
+
sC
s
Induttore
di
v(t ) = L ⋅
dt V ( s ) = sL ⋅ I ( s ) − L ⋅ I 0
−
i(0 ) = I 0
I ( s) =
V ( s) I 0
+
sL
s
15
i1(t)
i2(t)
Induttori mutuamente accoppiati
di1
di2
v1 (t ) = L1 ⋅ dt + M ⋅ dt
di
di
v2 (t ) = M ⋅ 1 + L2 ⋅ 2
dt
dt
M
v1(t)
L1
L2
v2(t)
i2( 0 − ) ≠ 0 = I 20
I2(s)
I1(s)
M
M I20 L1 I10
V1(s)
i1( 0 − ) ≠ 0 = I10
L1
L2 I20 M I10
L2
V2(s)
V1 ( s ) = sL1 I1 ( s ) + sMI 2 ( s) − L1 I10 − MI 20
V2 ( s ) = sMI1 ( s ) + sL2 I 2 ( s) − L2 I 20 − MI10
EQUAZIONI TOPOLOGICHE
AI COCICLI FONDAMENTALI
∑ i(t ) = 0
∑ I ( s) = 0
ALLE MAGLIE FONDAMENTALI
∑ v(t ) = 0
∑V ( s) = 0
16
ESEMPIO
i(t) 1/8F
∫
14 = 4 ⋅ i (t ) + v(0 ) + 8 ⋅ i (τ )dτ ⇒
0
v(t)
14δ−1(τ)
t
−
4Ω
t
∫
12 = 4 ⋅ i (t ) + 8 ⋅ i (τ )dτ
0
v(0 − ) = 2V
12
I ( s)
= 4 ⋅ I (s) + 8
s
s
( s + 2) ⋅ I ( s ) = 3 ⇒ I ( s ) =
3
s+2
i (t ) = 3 ⋅ e − 2t δ −1 (t )
NOTA COME LE CONDIZIONI INIZIALI ENTRANO
NEL CALCOLO IN MODO NATURALE
ESEMPIO
i(t) 3H
24 = 3 ⋅
24δ−1(τ)
i (0 − ) = 1 A
6Ω
di
+ 6⋅i
dt
[
]
24
= 3 s ⋅ I ( s ) − i (0 − ) + 6 ⋅ I ( s )
s
8
+ 1 = (s + 2)I ( s ) ⇒
s
8
+1
8+ s
4
3
I (s) = s
= −
= 2
s + 2 s + 2s s s + 2
3
4
i (t ) = L−1 − L−1
= 4δ −1 (t ) − 3 ⋅ e − 2tδ −1 (t ) =
s + 2
s
17
ESEMPIO
i(t) 1H
δ (t ) =
2Ω
δ (τ)
i (0 − ) = 0
di
+ 2⋅i
dt
1 = s ⋅ I ( s ) − i (0 − ) + 2 ⋅ I ( s )
1
I ( s) =
s+2
i (t ) = e − 2t δ −1 (t )
Nota:
i (0 − ) = 0
Lo stato non si e’ conservato
i (0 + ) = 1
i(t) 1H
di
+ 2 ⋅ i = δ (t )
dt
In assenza di casi patologici lo stato è meno
2Ω
δ (τ)
discontinuo dell' ingresso →
sarà al più un gradino (vedi Teorema).
Cerco le c.i.
i (0 − ) = 0
0+
0+
∫ di + ∫ 2idt = ∫ δ (t )dt
0-
Per t > 0
di
+ 2⋅i = 0
dt
i = Ae −2t i 0 + = 1 = A
0+
0-
i (0 + ) − i ( 0 − ) + 0 = 1
0-
+
i (0 ) = 1
( )
− 2t
i=e
per t > 0
oppure
i = e − 2tδ −1 (t )
18
ESEMPIO
i(t) 1H
1
I (s)
= s ⋅ I (s) + 2 ⋅ I (s) + 5
s
s
p = −1 + j 2
1
I (s) = 2
⇒ 1*
s + 2 s + 5 p1 = −1 − j 2
2Ω
δ −1(τ)
1/5F
v(t)
−
i (0 ) = 0 ; v (0 − ) = 0
R1 =
t
di
δ −1 (t ) = + 2 ⋅ i + 5∫ i (τ )dτ
dt
0
i(t ) = e − 2tδ −1 (t )
1
1
1
=
=−j
s → −1+ j 2 s + 1 + j 2
j4
4
lim
2
1
1
M =2 =
2
4
I ( s) =
ϕ =−
π
2
π 1 −t
1 e − jπ / 2 e jπ / 2
1 −t
+
⇒ i (t ) = e cos 2t − = e sin 2t
*
4 s − p1 s − p1
4
2 4
La funzione di rete
La funzione di rete indica il modo nel quale un segnale viene elaborato
nel suo passaggio attraverso una rete, supponendo che non esista
energia iniziale nella rete.
Si utilizza per
•valutare la risposta della rete
•la sintesi delle reti
•valutare la stabilità delle reti
19
Si definisce FUNZIONE DI RETE F(s) il rapporto fra la L-Trasf. della risposta
dovuta ad una data eccitazione (ingresso) e la L-Trasf. dell’ingresso:
dalla:
Y ( s) = F ( s ) ⋅U ( s) ⇒ F ( s) =
Y (s)
U (s)
Per circuiti lineari tempo-invarianti a costanti concentrate, ogni funzione di
rete e’ una funzione razionale a coefficienti reali in s
La funzione di rete si chiama FUNZIONE DI TRASFERIMENTO se l’ingresso
e l’uscita si riferiscono a coppie di morsetti diversi
La funzione di rete si chiama IMMETTENZA se ingresso e uscita si
riferiscono alla stessa copia di morsetti (una deve essere una tensione e l’altra
una corrente e viceversa
FUNZIONE DI TRASFERIMENTO E FUNZIONE DI RETE (Cnt.)
Se Y(s)= Tensione; U(s)= Tensione
F(s) Funz. di Trasferimento
Se Y(s)= Tensione; U(s)= Corrente
F(s) Impedenza (Ω
Ω)
Se Y(s)= Corrente; U(s)= Tensione
F(s) Ammettenza (S)
Se Y(s)= Corrente; U(s)= Corrente
F(s) Funz. di Trasferimento
20
RISPOSTA IMPULSIVA
Poniamo U(s)=1
Y(s)=F(s).1
Nel dominio di s, la risposta Y(s) coincide con la funzione di
rete F(s), quando l’ingresso e’ uguale a 1 e poiche’:
L−1 [U ( s )] = L−1 [1] = δ (t )
impulso
L−1 [Y ( s )] = L−1 [F ( s )] = h(t )
risposta impulsiva
LA RISPOSTA IMPULSIVA E’ L’ANTITRASFORMATA DELLA CORRISPONDENTE
FUNZIONE DI RETE
Nota h(t) e’ univocamente determinata la risposta ad un generico ingresso
u(t):
y(t)=h(t)*u(t)
cioe’ la risposta y(t) e’ uguale al prodotto di convoluzione tra risposta
impulsiva h(t) e funzione di ingresso u(t).
DIMOSTRAZIONE:
Y ( s) = F ( s ) ⋅U ( s)
y (t ) = L [Y ( s )] = L
−1
−1
t
[F (s) ⋅U (s)] = ∫ h(τ ) ⋅ u (t − τ )dτ =h(t ) * u (t )
0
La funzione di rete può essere utilizzata solo in circuiti
lineari tempo-invarianti
La risposta impulsiva può essere usata per qualunque
circuito
21
Un circuito e’ stabile se tutte le sue possibili risposte impulsive si
mantengono limitate per t∞
lim h(t ) < ∞
t →∞
Un circuito e’ instabile se una risposta impulsiva cresce senza limite per
t∞.
In termini di funzione di rete
H (s) =
N ( s)
N ( s)
=
D( s ) ( s − p1 ) ⋅ ⋅ ⋅ ( s − pn )
Affinchè il circuito sia stabile
I poli di H(s) devono avere parte reale negativa, oppure nulla nel
caso di poli semplici
Infatti:
Per i poli semplici il polo pi da luogo a
1
→ L−1{ } ∝ eℜe{ pi }t
s − pi
Per i poli multipli
1
→ L−1{ } ∝ t k −1e pit
(s − pi )k
Un circuito instabile non raggiunge mai il regime perché la risposta
transitoria non si smorza. Ad esso non è applicabile il metodo dei fasori.
Un circuito costituito da soli elementi passivi e generatori indipendenti non
può essere instabile.
I circuiti passivi hanno poli con parte reale negativa o nulla.
Un generatore controllato può rendere il circuito instabile.
22
x = Ax + Bu
sX(s) − x(0− ) = AX(s) + BU(s)
X(s) = (sI − A ) BU(s) + (sI − A ) x(0− )
−1
−1
y = Cx + Du
[
]
Y(s) = CX(s) + DU(s) = C (sI − A ) BU(s) + (sI − A ) x(0− ) + DU(s) =
[
]
−1
−1
= C (sI − A ) B + D U(s) + C(sI − A ) x(0− )
−1
[
H(s) = C (sI − A ) B + D
−1
]
−1
Y(s) = H(s)U(s) + C(sI − A ) x(0− )
Risposta a stato nullo
(forzata)
[
Risposta a ingresso nullo
(libera)
H(s) = C (sI − A ) B + D
−1
−1
]
funzione di rete
Per calcolare (sI-A)-1 occorre calcolare
polinomio caratteristico
∆(s)=det (sI-A)-1
(sI-A)-1=N(s)/ ∆(s)
Perciò qualsiasi polo della funzione di rete è uno zero del polinomio
caratteristico (qualche zero del p.c. può non essere un polo di H(s) a
causa di cancellazioni).
Radici del polinomio caratteristico = autovalori della
matrice A = frequenze libere = poli di H(s)
23