Sistemi Dinamici e Modelli Neuronali
Marco Storace
Dinamica di sistemi non lineari
DINAMICA: ANALISI DI SISTEMI CHE EVOLVONO NEL
TEMPO (⇒ in prima battuta, determinazione della presenza di
equilibri e valutazione della loro stabilità).
CENNI STORICI
Metà del 1600 Nascita della dinamica: Isaac Newton ⇒
legge di interazione Sole-Terra (problema
dei 2 corpi). Interazione Sole-Terra-Luna
(problema dei 3 corpi)?
1700
Fioritura del calcolo e della meccanica classica.
1800
Studi analitici del moto planetario ⇒ problema dei 3 corpi
impossibile da risolvere.
Fine 1800
Henri Poincaré ⇒ analisi qualitativa della dinamica di un
sistema (metodo geometrico). Intuisce che un sistema
deterministico può ammettere comportamenti aperiodici
che dipendono sensibilmente dalle condizioni iniziali ⇒
impossibile previsione a lungo termine.
1907
Lapique introduce il primo modello (fortemente astratto) di
neurone, originando la categoria dei modelli "integra e
spara" (integrate and fire o IF).
1920-1950
Oscillatori non lineari (→ invenzioni della radio, del radar
e del laser). Comportamenti complessi nella meccanica
Hamiltoniana (estensione del metodo geometrico di
Poincaré).
1
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Anni '50 Calcolatori ad "alta" velocità (previsioni del tempo) ⇒ sviluppo
di intuizioni relative ai sistemi non lineari.
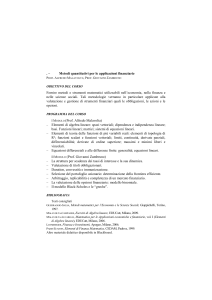
1952
Modello
di
Hodgkin
e
Huxley (premi Nobel nel
1963) dell'attività elettrica
dell'assone
gigante:
del
calamaro
descrive
tale
attività mediante un sistema
Alan Lloyd Hodgkin
Andrew Huxley
dinamico.
È il primo della categoria dei cosiddetti modelli "conductancebased", che tengono conto dei fenomeni biofisici alla base del
comportamento elettrico del neurone.
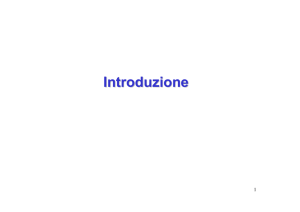
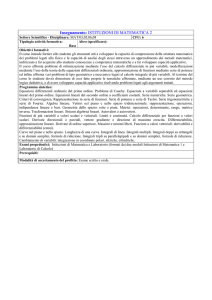
Anni '60 Lorenz ⇒ moto caotico in modello semplificato delle celle di
convezione nell'atmosfera. Soluzioni: non raggiungono mai un
equilibrio nè uno stato periodico, continuano a oscillare in
modo irregolare, aperiodico.
Due stati iniziali leggermente differenti ⇒ soluzioni ben presto
completamente diverse ("effetto butterfly").
45
40
35
X
30
25
20
15
10
5
0
5
10
15
20
25
T
2
Sistemi Dinamici e Modelli Neuronali
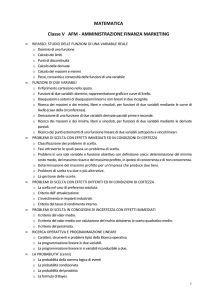
Conclusione:
Marco Storace
sistema
atmosferico
intrinsecamente
impredicibile.
Esiste un ordine anche in sistemi caotici: nello spazio delle
variabili del modello, le soluzioni si mantengono limitate (→
sorta di farfalla).
30
20
10
Z
0
-10
-20
-30
20
10
50
40
0
30
20
-10
-20
Y
10
0
X
40
35
X
30
25
20
15
10
5
-20
-15
-10
-5
0
Y
5
10
15
20
Anni '70 Boom degli studi sul caos nei settori più
disparati:
fluidodinamica,
elettronica,
meccanica,
chimica,
biologia,
economia (più tardi). Frattali (Benoit
Mandelbrot).
3
Sistemi Dinamici e Modelli Neuronali
Marco Storace
L'IMPORTANZA DELLA NON LINEARITA'
Sistemi dinamici: evolvono nel tempo e sono caratterizzati da uno stato.
Stato di un sistema: è l'insieme delle informazioni necessarie e sufficienti
per predire il futuro del sistema stesso (che si suppone noto, con gli
eventuali ingressi), a partire da un certo istante t0 ⇒ è l'insieme delle
condizioni iniziali (in t = t0) di un insieme limitato di variabili (dette di
stato). Le equazioni che descrivono il modo di evolvere di tali variabili
possono essere:
equazioni differenziali → sistemi a tempo continuo (es.: filtri
analogici):
x1 = f1 ( x1 (t),…, x N (t);u1 (t),…,u M (t); t )
x N = f N ( x1 (t),…, x N (t);u1 (t),…, u M (t); t )
Tutte le altre variabili (non di stato) del sistema si ricavano
algebricamente (un sistema puramente algebrico è un caso particolare
di sistema dinamico):
y1 (t) = g1 ( x1 (t),…, x N (t);u1 (t),…,u M (t); t )
y P (t) = g P ( x1 (t),…, x N (t);u1 (t),…, u M (t); t )
equazioni alle differenze (mappe iterate) → sistemi a tempo discreto
(es. filtri digitali, filtri a capacità commutate):
x1 (t k +1 ) = f1 (…)
x N (t k +1 ) = f N (…)
Anche in questo caso, tutte le altre variabili (non di stato) del sistema
si ricavano algebricamente.
4
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Equazioni differenziali:
ordinarie (ODE)
alle derivate parziali (PDE)
d2x
dx
Esempio di ODE → oscillatore armonico smorzato: m 2 + b + kx = 0
dt
dt
∂u ∂ 2 u
=
Esempio di PDE → equazione del calore:
∂t ∂x 2
Sistema di ODE: può essere espresso (in assenza di ingressi e di
dipendenze esplicite dal tempo) come
a
x1 = f1 x1 ,..., x N
a
f
x N = f N x1 ,..., x N
dove x k =
f
(*)
dx k
.
dt
N
Se fk = ∑ c jx j (k = 1,…,N) ⇒ sistema lineare.
j=1
In caso contrario ⇒ sistema non lineare.
Esempio: oscillatore armonico smorzato. Definiamo x1 = x e x2 = x :
x1 = x 2
x2 = −
sistema lineare
k
b
x 2 − x1
m
m
Se esiste soluzione unica ⇒ x1(t) e x2(t).
5
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Soluzione sul piano (x1,x2) istante per istante:
tempo continuo ⇒
tempo discreto ⇒
traiettoria ⇔ linea continua
traiettoria ⇔ successione di punti
x2
x1(t0),x2(t0)
x2
x1(t0),x2(t0)
x1(t4),x2(t4)
x1(tf),x2(tf)
verso del tempo
x1(t3),x2(t3)
x1(t1),x2(t1)
x1(t2),x2(t2)
x1
x1
Caso particolare: regime periodico
x2
x1(t),x2(t) = x1(t+T),x2(t+T)
x1
NOSTRO OBIETTIVO: sistema N-dimensionale (o di ordine N) (*) ⇒
disegnare le traiettorie (senza risolvere il sistema!) ⇒ informazioni sulle
soluzioni.
N è la dimensione dello spazio degli stati.
Sistemi lineari (o, entro certi limiti, lineari a tratti) ⇒ si spezza l'analisi in
sottoproblemi più semplici e si ricombinano le soluzioni parziali (p. es.
usando sovrapposizione degli effetti, trasformate di Laplace o analisi di
Fourier).
Sistemi non lineari "smooth" ⇒ meccanismi di interazione o interferenza,
cooperazione o competizione ⇒ analisi molto più complessa (spesso non
si riescono a trovare soluzioni in forma chiusa).
6
Sistemi Dinamici e Modelli Neuronali
Marco Storace
SISTEMI AUTONOMI E SISTEMI NON AUTONOMI
Il sistema
a
x1 = f1 x1 ,..., x N
f
a
x N = f N x1 ,..., x N
(*)
f
si dice autonomo perché non include alcuna dipendenza esplicita dal
tempo.
Sistema non autonomo di ordine N ⇔ sistema autonomo di ordine N+1.
Esempio: oscillatore armonico con forzante sinusoidale
d2x
dx
m 2 + b + kx = F cos t
dt
dt
(eq. non autonoma del 2° ordine)
m
F cos t
0
x
Sistema (autonomo) corrispondente (basta introdurre una nuova variabile
x3 = t):
x1 = x 2
x2 = −
F
b
k
x1 − x 2 + cos x3
m
m
m
x3 = 1
Vantaggio di questo cambio di
variabili? Riesco a visualizzare le
traiettorie [x1(t),x2(t),x3(t)] in uno
spazio (spazio di stato) in cui il
tempo
NON
compare
esplicitamente ⇒ posso adottare
un metodo geometrico per ricavare
informazioni sulla soluzione.
(sistema non lineare autonomo del 3° ordine)
Punto di vista fisico: lo stato dell'oscillatore armonico forzato è in effetti
3D (per poter predire il futuro, dato il presente, servono 3 variabili:
posizione x, velocità x e tempo t).
7
Sistemi Dinamici e Modelli Neuronali
Marco Storace
SISTEMI DETERMINISTICI E SISTEMI STOCASTICI
Sistema deterministico: al tempo t0+Δt c'è un unico stato possibile
x(t0+Δt) come conseguenza di un dato stato iniziale x(t0).
Sistema stocastico (o random): al tempo t0+Δt c'è più di una possibilità ⇒
la scelta viene effettuata in base a una certa distribuzione di probabilità.
Esempio: oscillatore armonico con forzante sinusoidale e rumore additivo
d2x
dx
m 2 + b + kx = F cos t + n( t )
dt
dt
dove, per esempio, n(t) è un rumore gaussiano a varianza σ2 e media nulla.
Schema seguente:
•) fornisce esempi di sistemi a diversi livelli di complessità (lineari o
non lineari, di diverse dimensioni).
•) dice che useremo strumenti di analisi applicabili a sistemi
provenienti dalle discipline più diverse (fisica, biologia,
economia, ecc.).
•) differenti livelli di complessità (diverse zone della mappa) →
esempi relativi a varie discipline e comportamenti tipici.
•) In ambito lineare → conoscenze ben assestate. Nel non lineare →
zone solo parzialmente conosciute. La ricerca si svolge
attualmente nella maggior parte dei casi proprio in queste regioni.
8
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Complessità di un sistema
N=1
N=2
Crescita, decadimento o equilibrio
Oscillazioni
Crescita esponenziale
Oscillatore lineare
N=3
Meccanica razionale
N >> 1
N → ∞ (continuo)
Fenomeni collettivi
Onde e patterns
Oscillatori armonici
Elasticità
accoppiati
LINEARE
Circuito RC
Circuito RLC
Ingegneria civile
Fisica dello stato solido
Equazioni delle onde
Decadimento radioattivo
Problema dei due corpi
Ingegneria elettrica
Dinamica molecolare
Elettromagnetismo
(Newton, Keplero)
(Maxwell)
Quantomeccanica
(Schrödinger, Heisenberg, Dirac)
Calore e diffusione
Acustica
Caos deterministico
Punti fissi
NON
LINEARE
Biforcazioni
Cicli limite
Complessità spazio-temporale
Attrattori strani
Oscillatori non lineari
Onde non lineari (onde di shock,
(Lorenz)
accoppiati
solitoni)
Oscillatori biologici (neuroni,
Problema dei 3 corpi
Laser
Plasmi
cellule cardiache)
(Poincarè)
Elettronica non lineare
Cinetiche chimiche
Fisica dello stato solido non
Terremoti
(Van der Pol, Josephson)
lineare (semiconduttori)
Oscillatori non lineari
Reti neurali formali e reti
(forzati) e sistemi caotici
neuronali
Frattali e mappe iterate
Ecosistemi
Fenomeni di reazione-diffusione
Caos stocastico
Economia
Onde biologiche e chimiche
Risonanza stocastica
Relatività generalizzata
Turbolenza dei fluidi (NavierStokes)
9
Sistemi Dinamici e Modelli Neuronali
Marco Storace
SISTEMI CHE SARANNO TRATTATI NEL CORSO
Nell'ambito del corso considereremo sistemi (modelli) non lineari,
deterministici, autonomi, con particolare attenzione ai modelli di neuroni
biologici, a diversi livelli di astrazione.
Daremo qualche cenno sui modelli astratti (del tipo integra e spara), che
rivestono grande importanza quando si tratta di simulare reti con un
elevato numero di neuroni. Analizzeremo in maniera più approfondita (dal
punto di vista della dinamica non lineare) modelli "conductance-based",
che hanno una maggiore aderenza al sistema biologico che modellano, ma
la cui complessità rende difficili simulazioni di reti su larga scala.
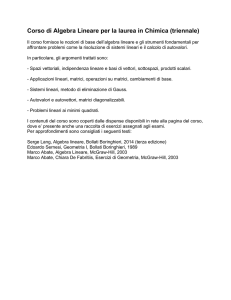
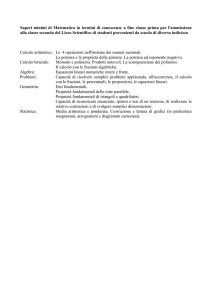
Schema che classifica vari modelli sulla base della plausibilità biologica e
del costo computazionale:
I modelli che analizzeremo più in dettaglio sono incorniciati in rosso.
10