Sistemi Dinamici e Modelli Neuronali
Marco Storace
Come si crea un modello?
Ciò che comunemente intendiamo per "comprendere" coincide con "semplificare":
senza una profonda semplificazione, il mondo intorno a noi sarebbe un groviglio
infinito e indefinito, che sfiderebbe la nostra capacità di orientarci e di decidere le nostre
azioni. Siamo insomma costretti a ridurre il conoscibile a schema: a questo scopo
tendono i mirabili strumenti che ci siamo costruiti nel corso dell’evoluzione e che sono
specifici del genere umano, il linguaggio ed il pensiero concettuale. [...] Questo
desiderio di semplificazione è giustificato, la semplificazione non sempre lo è. E’
un’ipotesi di lavoro, utile in quanto sia riconosciuta come tale e non scambiata per la
realtà; la maggior parte dei fenomeni storici e naturali non sono semplici, e non semplici
della semplicità che piacerebbe a noi.
P. Levi, I sommersi e i salvati
Credo che queste parole di Primo Levi diano una descrizione molto
efficace del processo e delle motivazioni che conducono a formulare un
modello di un sistema, ossia di un settore limitato della realtà, o di un
fenomeno, ossia di un particolare comportamento esibito dal sistema.
Il termine "modello" possiede un ampio spettro di significati. In ambito
scientifico, per modello di un sistema si intende, in generale, una
schematizzazione che ne considera solo gli aspetti essenziali: enucleando
dal sistema le sole funzioni o caratteristiche che determinano un
particolare fenomeno, se ne semplifica notevolmente l’analisi e se ne
garantisce la riproducibilità. Questo processo di astrazione di peculiarità
non vuole fornire una rappresentazione fotografica della realtà, bensì mira
ad essere strumento per interpretarla e per individuare e analizzare le
regolarità che in essa si manifestano.
Nell'ambito di questo corso, ci concentreremo su sistemi dinamici e in
particolare su modelli di neuroni. Un modello matematico di un sistema
dinamico S è costituito da equazioni, una o più, le cui singole soluzioni in
risposta a un dato ingresso rappresentino una buona approssimazione delle
corrispondenti variabili misurate in S: le equazioni, in generale, sono non
10
Sistemi Dinamici e Modelli Neuronali
Marco Storace
lineari e possono includere equazioni algebriche, equazioni differenziali
ordinarie, equazioni differenziali alle derivate parziali e/o equazioni
integrali. Spesso si ricava un modello matematico realistico combinando le
leggi fisiche di base che governano il sistema con uno "scheletro" di
modello la cui topologia è basata sulla geometria e sulla struttura del
sistema (esempio: transistor).
E’ importante notare che un modello di un sistema S non è, in generale, un
sistema equivalente a S, perchè nessun sistema reale può essere imitato
esattamente da un modello matematico: un dato sistema può anche avere
modelli distinti, a seconda dell’applicazione. Non sempre esiste dunque un
modello ottimale valido per tutte le occasioni: in ogni data situazione, il
modello migliore è il modello più semplice in grado di produrre soluzioni
realistiche.
Un modello deve soddisfare alcuni requisiti fondamentali.
In primo luogo deve essere ben posto, nel senso che, connesso con altri
modelli ben posti, non deve dar adito a situazioni non fisiche.
In secondo luogo un modello deve possedere una buona capacità di
simulazione: i risultati ottenuti utilizzando il modello devono fornire una
buona approssimazione di un insieme finito di soluzioni ammissibili detto insieme di verifica - misurate a priori sul sistema.
Il terzo requisito è la somiglianza qualitativa: il modello deve esibire lo
stesso comportamento qualitativo manifestato dal sistema. Se, per
esempio, in certe condizioni S dà luogo a una risposta periodica, nelle
stesse condizioni il modello deve esibire lo stesso comportamento.
11
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Il quarto requisito riguarda la capacità predittiva: essa riguarda la
possibilità che il modello sia in grado di predire modi di funzionamento
non noti a priori, suggerendo così nuovi esperimenti e applicazioni.
Infine, il modello deve possedere una certa stabilità strutturale: le sue
proprietà qualitative non devono cambiare in seguito a piccole
perturbazioni dei parametri.
Per i sistemi lineari esiste un teorema di rappresentazione che permette, ad
esempio, di stabilire l'equivalenza di modelli lineari, confrontando la
risposta del modello con quella del sistema da rappresentare per uno stesso
insieme di eccitazioni sinusoidali. Purtroppo la validità di questi risultati è
circoscritta ai sistemi lineari. Il teorema di rappresentazione per sistemi
non lineari dovuto a Wiener richiede, per fornire una caratterizzazione
completa, un insieme infinito di coefficienti e non esiste una prova
costruttiva per ricavarli, per cui non è facilmente utilizzabile a fini
modellistici.
La definizione di un modello avviene, finchè è possibile, seguendo
procedimenti ormai assestati nell’ambito della teoria dei sistemi e
affidandosi per il resto all’esperienza e all’abilità individuale. Per definire
modelli che esibiscano un buon grado di similitudine con il
comportamento qualitativo di sistemi reali, si fa riferimento di frequente a
due procedimenti: uno di tipo fisico, detto physical approach, e uno di tipo
sistemistico, detto black-box approach. In entrambi i casi occorre,
preliminarmente, ricavare una descrizione matematica che approssimi il
comportamento del sistema.
Poichè lo scopo di un modello è "simulare" il più accuratamente possibile
un dato sistema fisico S, è essenziale individuare tutte le proprietà
12
Sistemi Dinamici e Modelli Neuronali
Marco Storace
importanti e tutti i comportamenti interessanti di S: è questa la
considerazione su cui si basa il physical approach. Il criterio più sicuro e
più logico per estrarre l’informazione su che cosa il modello deve simulare
consiste in un accurato studio dei meccanismi fisici e funzionali del
sistema: in tal caso, la validità del modello dipende dalla validità della
rappresentazione fisica del sistema e da quella di ogni approssimazione cui
si fa ricorso nel processo di approdo al modello finale.
L'efficacia di questo metodo presuppone la comprensione dettagliata dei
meccanismi
fisici
di
funzionamento
del
sistema
da
modellare.
Sfortunatamente tale comprensione è spesso incompleta o grossolana.
Inoltre l'identificazione con la struttura interna del sistema richiede molte
ipotesi semplificative e idealizzazioni.
Nell'ambito del corso, ci concentreremo sul black-box approach, a cui
tipicamente si ricorre quando la fisica del sistema e i meccanismi di
funzionamento non sono del tutto chiari, o quando il sistema è talmente
complesso
che
il
physical
approach
sarebbe
improponibile.
Schematicamente si distinguono, ancora una volta, quattro passi, l'ultimo
dei quali si riferisce alla sintesi (per esempio, circuitale) del modello.
1) Il sistema viene sottoposto a diversi segnali di prova (per esempio,
impulsi, "piccoli segnali" sinusoidali a varie frequenze, segnali in
continua e a gradino di differenti ampiezze, segnali periodici
sinusoidali, triangolari e rettangolari di diverse ampiezze e periodi,
ecc.) e ogni risposta viene misurata e memorizzata per la successiva
verifica quantitativa. Dalle misure ottenute occorre estrarre anche il
maggior numero possibile di proprietà qualitative. Per esempio, la
presenza di un ciclo di isteresi di una certa forma è un’importante
13
Sistemi Dinamici e Modelli Neuronali
Marco Storace
proprietà qualitativa; un'altra può essere l’esistenza di una risposta
subarmonica a particolari eccitazioni. Queste proprietà sono necessarie
per il successivo processo di verifica qualitativa.
2) Si sintetizza un modello matematico in grado di simulare la totalità o
quasi delle proprietà osservate al passo precedente. Se possibile, si
cerca di trovare un sistema di equazioni algebriche non lineari e di
equazioni differenziali ordinarie le cui soluzioni soddisfino tali
proprietà.
3) Si analizza il modello matematico elaborato: si determina se esso è in
grado di riprodurre (e, in tal caso, con quale grado di approssimazione)
i dati misurati e le proprietà qualitative osservate. Questa procedura di
verifica è in genere costituita da due fasi: nella fase di verifica
quantitativa si applicano al modello gli stessi segnali di ingresso usati
per le misure effettuate al primo passo e si confronta la corrispondente
risposta simulata al calcolatore con la risposta misurata; nella fase di
verifica qualitativa si sviluppa una dimostrazione matematica per
provare che il modello esibisce tutte le proprietà qualitative estratte al
primo passo. Questo passo è essenziale per conferire al modello
capacità predittive, dato che il modello non si basa sulla fisica del
dispositivo nè su meccanismi funzionali interni.
4) Posto che al passo 3) si sia riusciti a definire un elemento dinamico a
parametri concentrati come modello matematico di S, il passo 4)
consiste nel sintetizzare un modello (circuitale, meccanico, ecc.) a
parametri concentrati. Se, viceversa, non è stato possibile ricondursi a
un modello a parametri concentrati, giunti al passo 4) si sintetizza un
modello che comprenda sia elementi a parametri concentrati, sia
14
Sistemi Dinamici e Modelli Neuronali
Marco Storace
elementi a parametri distribuiti (per esempio linee di trasmissione, nel
caso dei circuiti).
Un illustre esempio di modello ottenuto seguendo il black-box approach è
il modello di Hodgkin e Huxley, che consente di riprodurre il
comportamento caratteristico della membrana di un neurone. Partendo da
osservazioni sperimentali sulla propagazione del potenziale d’azione
sull’assone (gigante) del calamaro, negli anni ‘50 Alan Lloyd Hodgkin e
Andrew Fielding Huxley ottennero un sistema di equazioni che consentì
loro di ricavare il modello della membrana neuronale.
Per quanto riguarda il problema dell’identificazione dei parametri di
uno
specifico
modello,
comunque
lo
si
sia
ottenuto,
occorre
essenzialmente un sistema di misura efficiente direttamente associato a
un’efficace procedura di ottimizzazione computerizzata.
Sta all’abilità e all’esperienza del modellista "dosare" nel modo più
appropriato gli "ingredienti" a disposizione (le entità identificabili nel
dispositivo) e sfruttare al meglio gli strumenti concettuali di cui può
usufruire per riuscire ad ottenere il modello migliore nel senso specificato
in precedenza. A tal fine, egli dovrà usare con perizia il "rasoio di
Ockham", in modo da chiamare in causa le sole entità necessarie e
sufficienti a ottenere il risultato voluto (le semplificazioni "giustificate" di
Levi): "Non sunt multiplicanda entia sine necessitate"[1].
Il modello del sistema dinamico, una volta ricavato, va sottoposto ad
analisi (passo 3 del black box approach) per studiare esistenza e unicità
[1]
Versione vulgata della formulazione ockhamistica "Frustra fit per plura quod potest fieri per pauciora" (Guglielmo
di Ockham, in "Expositio aurea super totam artem veterem"), ossia "Si fa inutilmente con molte cose ciò che si
può fare con poche cose".
15
Sistemi Dinamici e Modelli Neuronali
Marco Storace
della soluzione, proprietà delle soluzioni, loro espressioni analitiche o
approssimazioni numeriche, ecc. Nel caso di sistemi dinamici non lineari,
tipicamente non esistono soluzioni in forma chiusa, per cui occorre
ricorrere ad altri sistemi. I principali metodi di analisi sono due:
• metodo geometrico, introdotto verso la fine dell'800 da Poincaré,
che risulta applicabile a sistemi di complessità non troppo elevata;
• metodi numerici, di integrazione numerica o di continuazione.
Nel secolo scorso, un enorme impulso allo sviluppo dell'analisi
numerica fu dato dall'introduzione dei moderni calcolatori (subito prima e
durante la seconda guerra mondiale) e dall'introduzione di linguaggi di
programmazione ad alto livello. Alan Mathison Turing e John von
Neumann furono pionieri in questo ambito.
I metodi di analisi numerica vengono programmati su calcolatori e,
applicati ad esempi significativi, forniscono risultati: l'analisi dei risultati
numerici può portare a nuove idee, nuovi algoritmi e perfino a nuove
teorie (è esattamente quanto accadde con il caos e i frattali). Per questo
l'analisi numerica può essere definita come un misto di analisi matematica
e calcolo numerico.
16
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Modelli di neuroni
Un modello di neurone biologico è una descrizione matematica delle
proprietà di cellule nervose (neuroni) sufficientemente accurata nel
descrivere e predire processi biologici. Non appartengono a questa
categoria i cosiddetti neuroni artificiali, che sono modelli più orientati
all'efficienza computazionale (reti neurali artificiali) che alla aderenza al
sistema a cui sono ispirati.
NEURONI ARTIFICIALI
Il modello più semplice di un neurone (supponiamo il j-esimo all'interno di
una rete) consiste di una variabile di uscita yj ottenuta applicando una
funzione non lineare φ (detta a volte funzione di attivazione) a una somma
di variabili di ingresso xi provenienti da altri neuroni, ciascuna moltiplicata
per un peso sinaptico wij:
⎛
⎞
y j = φ ⎜ ∑ w ij x i ⎟
⎝ i
⎠
Questo tipo di modello, estremamente astratto, viene impiegato nelle reti
neurali artificiali e non lo considereremo nell'ambito del corso.
IL NEURONE BIOLOGICO
Nel caso dei modelli di neurone biologico si utilizzano analogie fisiche
piuttosto che astrazioni quali i pesi e la funzione di attivazione.
Il neurone è una cellula eccitabile del sistema nervoso ed è in grado di
elaborare e trasmettere informazione mediante meccanismi elettrochimici.
Ci sono neuroni specializzati per determinate funzioni: sensoriali (per
rispondere al tatto, al suono, alla luce, agli odori e ad altri stimoli), motori
17
Sistemi Dinamici e Modelli Neuronali
Marco Storace
(che causano contrazioni dei muscoli a seguito di stimoli da parte del
cervello), di collegamento (i cosiddetti interneuroni), ecc.
Tutti i neuroni rispondono a stimoli e/o comunicano la presenza di stimoli
al sistema nervoso centrale, che elabora l'informazione e invia le risposte
alle opportune parti del corpo. I segnali inviati/ricevuti sono di natura
elettrochimica.
Esistono neuroni di diverse forme e dimensioni. L'anatomista Camillo
Golgi ne individuò 2 classi: di tipo I, caratterizzati da lunghi assoni per
trasportare i segnali a lunghe distanze e di tipo II, privi di assone o con
assoni molto corti.
Una cellula neuronale di tipo I può essere schematizzata come nella figura
sottostante:
Dendrite
Nodo di
Ranvier
Terminale assonico
Soma
Assone
Cellula di Schwann
Guaina mielinica
Nucleo
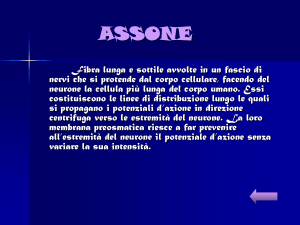
Il corpo cellulare (o soma) contiene il nucleo e ha molte propaggini:
alcune sono più corte (dendriti) e hanno il compito di facilitare la
ricezione di segnali da altri neuroni; una è molto più lunga e sottile
(assone), è ricoperta dalla guaina mielinica (formata da cellule gliali, come
le cellule di Schwann) e ha il compito di trasmettere segnali a distanza. La
guaina mielinica ha proprio la funzione di mantenere pressoché inalterato
il segnale trasmesso.
18
Sistemi Dinamici e Modelli Neuronali
Marco Storace
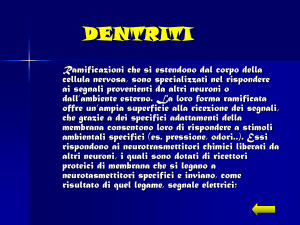
L'assone termina ramificandosi nei terminali assonici, che sono in grado di
rilasciare particelle dotate di carica (neurotrasmettitori) negli interstizi
(detti sinapsi) che li separano dai dendriti di un altro neurone.
Della funzione dei cosiddetti nodi di Ranvier parleremo più avanti.
La membrana del neurone non è uniforme e ha la proprietà di essere
elettricamente eccitabile: questo significa che, in risposta a stimoli
elettrochimici, può produrre un segnale elettrico detto potenziale
d'azione.
Vediamo meglio come è fatta la membrana dell'assone e del soma.
La membrana dell'assone e del soma è formata da un doppio strato
lipidico, con teste idrofiliche all'esterno e code idrofobiche all'interno:
Le membrane sono stabilizzate e gli ioni presenti all'interno e all'esterno in
soluzioni acquose non sono in grado di permearle in numero significativo,
a causa dei ponti idrogeno che le teste dei lipidi formano con le molecole
19
Sistemi Dinamici e Modelli Neuronali
Marco Storace
di acqua. La presenza di uno strato isolante in mezzo a 2 strati conduttori
permette di assimilare la membrana cellulare a un condensatore.
La differenza di concentrazione ionica all'interno e all'esterno della
membrana determina una differenza di potenziale (tensione) ai suoi capi.
In condizioni di "riposo", la tensione di membrana (potenziale interno
meno potenziale esterno) è di circa -65mV: questo significa che la
concentrazione di ioni negativi è più alta all'interno che all'esterno della
cellula. La tensione di membrana gioca un ruolo molto importante nelle
dinamiche neuronali. Quando il valore assoluto della tensione di
membrana diminuisce, si dice che la membrana si depolarizza; quando
invece aumenta, si dice che la membrana si iperpolarizza.
Oltre ai lipidi, le membrane contengono anche canali ionici, ossia delle
proteine che costituiscono percorsi specializzati nella conduzione di ioni
attraverso la membrana:
Il canale ha una sorta di "collo di bottiglia" in cui si ha un'alta probabilità
di trovare uno ione e che serve come filtro, per selezionare il passaggio di
determinati ioni.
20
Sistemi Dinamici e Modelli Neuronali
Marco Storace
"Foto" al microscopio elettronico di un canale:
Alcuni canali sono sempre "aperti" (con il meccanismo di filtraggio
descritto) e costituiscono dei "pori" nella membrana. Questi canali possono
essere rappresentati come resistori lineari collegati in serie a un generatore
di tensione costante che tiene conto dello sbilanciamento di carica tra
interno ed esterno della membrana.
Esistono poi altri canali (che si concentrano nei nodi di Ranvier
dell'assone) la cui apertura e chiusura dipende dalla tensione di membrana:
quelli più importanti riguardano il passaggio di ioni sodio (Na+), potassio
(K+) e, in misura minore, calcio (Ca++) e cloro (Cl−).
21
Sistemi Dinamici e Modelli Neuronali
Marco Storace
La variazione di tensione che induce l'apertura di questi canali può
avvenire a causa del passaggio ionico attraverso i pori della membrana
(lento, passivo, dovuto a diffusione), oppure a causa di un flusso di
correnti ioniche indotto in qualche modo dall'esterno. Quando per effetto
di questi flussi ionici la membrana si depolarizza rispetto alla situazione di
riposo, la tensione di membrana sale verso lo zero: se raggiunge un valore
di soglia (intorno ai −55mV), la tensione di membrana comincia a salire
rapidamente per poi ridiminuire altrettanto rapidamente. È questo il
cosiddetto potenziale d'azione (o spike) caratteristico delle dinamiche
neuronali. Il potenziale d'azione può propagarsi lungo il neurone, causando
a sua volta l'apertura/chiusura dei canali.
Ciascuno di questi canali può essere modellato elettricamente da un
resistore con resistenza (o conduttanza) che dipende dalla tensione (o dal
tempo) collegato in serie a un generatore di tensione costante.
Quando la cellula è "a riposo" il flusso di ioni verso l'esterno è
perfettamente bilanciato da quello verso l'interno.
22
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Vediamo ora come è fatta la membrana dei terminali assonici.
I terminali assonici possono essere direttamente collegati con i dendriti, il
soma o (più raramente) l'assone di un altro neurone tramite sinapsi
elettriche, che permettono la trasmissione diretta di un potenziale
d'azione. Oppure, la trasmissione del potenziale di azione può essere
mediata da processi chimici: in questo caso, l'arrivo del potenziale d'azione
stimola il rilascio di neurotrasmettitori (particelle dotate di carica
contenute in vescicole) da parte del terminale assonico (del neurone
presinaptico) negli interstizi che li separano dai dendriti di un altro
neurone (post-sinaptico): gli interstizi vengono superati tramite processi
diffusivi e attivano dei recettori nel neurone post-sinaptico. In questo caso
si parla di sinapsi chimiche o elettrochimiche.
23
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Le sinapsi possono essere eccitatorie o inibitorie: nel primo caso stimolano
l'attività elettrica del neurone post-sinaptico, ossia depolarizzano la
membrana agevolando il raggiungimento della soglia di generazione del
potenziale d'azione; nel secondo caso iperpolarizzano la membrana,
allontanando così la tensione dalla soglia e inibendo l'attività elettrica del
neurone.
Il potenziale d'azione si propaga lungo il neurone: l'assone funge da cavo
di trasmissione, grazie alla mielinizzazione (che riduce le perdite) e grazie
alla presenza dei nodi di Ranvier che rinforzano il segnale.
Il cervello umano contiene circa 1011 neuroni, ciascuno dei quali ha in
media 7000 connessioni sinaptiche con altri neuroni.
PRINCIPALI COMPORTAMENTI DINAMICI
Quando la membrana è attraversata da una corrente (ionica), che si
stabilizza a un valore costante, la tensione di membrana può dare luogo a
dinamiche molto diverse, a seconda del valore di corrente e delle
condizioni sperimentali (tipo di neurone, sue caratteristiche, caratteristiche
ambientali, ecc.). Lasciando per un attimo da parte il transitorio, i
principali tipi di regime conseguibili sono 4:
-) regime stazionario (comportamento quiescente): la tensione di
membrana è al valore di riposo (o nelle vicinanze);
-) regime periodico "spiking": il neurone genera a intervalli regolari uno
spike;
-) regime periodico "bursting": il neurone genera a intervalli regolari una
raffica ("burst") di spike;
-) regime caotico: il neurone genera spike a intervalli irregolari.
24
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Analizzando anche il transitorio, uno dei comportamenti tipici è il
cosiddetto adattamento della frequenza di spiking (spike frequency
adaptation), in base al quale prima di raggiungere un regime periodico
spiking un neurone varia la propria frequenza "di sparo", riducendola
progressivamente.
MODELLI DI NEURONE BIOLOGICO
Il neurone può essere modellato a diversi livelli. Se si tiene conto degli
effetti propagativi, occorre fare ricorso o a equazioni differenziali alle
derivate parziali o a modelli a compartimenti, come per le linee elettriche.
Se invece si suppone che la propagazione del potenziale d'azione sia
pressoché istantanea rispetto alla scala dei tempi di generazione dello
stesso, si possono definire modelli (detti a singolo compartimento)
definiti da equazioni differenziali ordinarie ed equazioni algebriche.
Nell'ambito dei modelli di neurone biologico a singolo compartimento,
esistono fondamentalmente 2 categorie di modelli: quelli di tipo "integrate
and fire" e quelli "conductance-based".
Modelli "integrate and fire"
I modelli di tipo "integrate and fire" sono caratterizzati da un elevato
livello di astrazione. In altri termini, l'aderenza a quanto accade nei
processi bioelettrochimici che originano il comportamento dei neuroni è
molto bassa, ma si cattura l'evento più eclatante, ossia la generazione di un
potenziale d'azione o "spike". Hanno il vantaggio di poter essere utilizzati
per simulare reti di neuroni anche di elevate dimensioni.
25
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Il modello originale, introdotto da Lapicque nel 1907 tiene conto dei soli
effetti capacitivi di membrana:
I(t) = CM dv/dt
dove CM è la capacità di una porzione di membrana [F/cm2], v è la
tensione ai capi della stessa [V/cm2] e I(t) è la corrente (ionica) che viene
iniettata nella membrana [A/cm2].
Dunque l'equivalente elettrico è questo:
v
I(t)
CM
Applicando una corrente positiva in ingresso al modello, la tensione
comincia a crescere con velocità costante finché non raggiunge un valore
di soglia VTH: a questo punto, il modello impone che v(t) produca un
impulso e ritorni quindi al valore di riposo, dopodiché si riparte con il
comportamento lineare. Da qui il nome "integra e spara".
Difetti del modello: trascura molti aspetti della natura del neurone; la
frequenza di sparo cresce linearmente senza limiti al crescere della
corrente di ingresso.
Un modello più accurato ("Leaky Integrate and Fire" o LIF) tiene conto
degli effetti di "perdita" dovuti alla presenza dei canali passivi nella
membrana:
26
Sistemi Dinamici e Modelli Neuronali
Marco Storace
v
RL
I(t)
+ CM
VL
Dunque il modello diventa:
I(t) = CM dv/dt + (v−VL)/RL
Ossia (esprimendo RL come 1/gL):
CM dv/dt = − gL(v−VL) + I(t)
Nuovamente, quando v(t) raggiunge la soglia VTH l'uscita del neurone
"spara" e la tensione (variabile di stato) viene riportata al valore di riposo
VRE.
Modelli "conductance-based"
In questo caso, la membrana viene modellata in maniera decisamente più
accurata, tenendo conto anche delle correnti ioniche attraverso i canali
"attivi":
Esterno della cellula
v
I(t)
CM
gNa
gK
gL
iNa
+
VNa
iK
+
VK
+
VL
Interno della cellula
N.B.: v è la tensione di membrana (potenziale interno meno potenziale
esterno) cambiata di segno.
Oltre agli elementi già noti, compaiono due rami che modellano i canali
del sodio e del potassio. Le conduttanze gNa e gK sono non lineari e
27
Sistemi Dinamici e Modelli Neuronali
Marco Storace
controllate in tensione: il loro valore dipende in modo non banale dalla
tensione di membrana v.
Quello appena descritto è il modello di Hodgkin e Huxley (1952)
dell'assone gigante del calamaro, che si può formalizzare in termini
analitici come segue:
I(t) = CM dv/dt + gL(v−VL) + iNa + iK
iNa = (v−VNa) gNa(v) = (v−VNa) GNa m3h
iK = (v−VK) gK(v) = (v−VK) GK n4
con m, n e h variabili di stato (dette anche "gating variables" perchè
descrivono l'apertura/chiusura dei canali sodio e potassio) governate dalle
seguenti equazioni (ricavate empiricamente da Hodgkin e Huxley):
v
⎛
⎞
dn
0.01(v + 10)
80
n
0.125e
= (1 − n)
−
⎜
⎟=
v +10
dt
⎝
⎠
e 10 − 1
n (v) − n
= (1 − n)α n (v) − nβn (v) = ∞
τn (v)
⎛ 18v ⎞
dm
0.1(v + 25)
= (1 − m) v+25
− m ⎜ 4e ⎟ =
dt
⎝
⎠
e 10 − 1
m (v) − m
= (1 − m)α m (v) − mβm (v) = ∞
τm (v)
v
dh
20
= (1 − h)0.07e − h
dt
1
v +30
10
=
+1
h (v) − h
= (1 − h)α h (v) − hβh (v) = ∞
τh (v)
e
Nome delle variabili: m attivazione del sodio, h inattivazione del sodio, n
attivazione del potassio. Le equazioni possono essere espresse
equivalentemente in termini delle funzioni αj(v) e βj(v) (originariamente
28
Sistemi Dinamici e Modelli Neuronali
Marco Storace
introdotte da Hodgkin e Huxley), oppure delle funzioni j∞(v) e τj(v), con
j = m,n,h. Queste ultime sono legate alle precedente dalle seguenti
relazioni:
τ j (v) =
1
α j (v) + β j (v)
j∞ (v) = α j (v)τ j (v) =
α j (v)
α j (v) + β j (v)
e hanno un vantaggio intepretativo: le variabili j∞(v) rappresentano il
regime a cui tendono le variabili j (= m,n,h), mentre i termini τj(v) sono le
"costanti" di tempo (dipendenti da v) che governano la dinamica di
ciascuna variabile. Come sappiamo, a seconda del valore di v la dinamica
di ciascuna variabile può essere più lenta o più veloce. Le figure seguenti,
mostrano gli andamenti delle variabili j∞(v) e τj(v) al variare di v:
29
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Quindi il modello complessivo (del quarto ordine) è:
CM
dv
= I(t) − (v − VNa )G Na m3h − (v − VK )G K n 4 − (v − VL )g L
dt
v
dn 0.01(v + 10)(1 − n)
80
=
− 0.125e n
v +10
dt
e 10 − 1
v
dm 0.1(v + 25)(1 − m)
18
=
− 4e m
v + 25
dt
e 10 − 1
v
dh
20
= 0.07 e (1 − h) −
dt
h
e
v +30
10
+1
Le tensioni sono espresse in mV, le correnti in μA/cm2, la capacità in
μF/cm2 e il tempo in ms; le variabili m, n e h sono adimensionali e sono
nell'intervallo [0,1] perchè rappresentano la frazione di canali aperti.
.
Parametri (per l'assone del calamaro a 6.3ºC, con potenziale di riposo
scalato a 0V):
CM = 1 [μF/cm2]
GNa = 120 [mS/cm2]; GK = 36 [mS/cm2]; gL = 0.3 [mS/cm2];
VNa = −115 [mV]; VK = 12 [mV]; VL = −10.6 [mV].
I modelli conductance-based sono tutti riconducibili a questo tipo di
descrizione: si possono tenere in conto canali diversi, si possono cambiare
le equazioni, ma il principio di funzionamento è quello descritto.
Al variare dei parametri, si possono ottenere tutti i comportamenti
dinamici descritti in precedenza.
Vediamo qualche altro modello appartenente a questa categoria.
30
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Il modello di FitzHugh-Nagumo (1962) è una semplificazione del
modello di Hodgkin e Huxley: perde aderenza con la fisica del neurone,
ma riesce a riprodurne le dinamiche essenziali.
Le semplificazioni sono legate alle osservazioni seguenti (dovute a
Richard FitzHugh, 1961):
-) le variabili n e h hanno dinamiche più lente rispetto alla variabile m;
-) per i parametri specificati da Hodgkin e Huxley, la somma n+h rimane
circa costante al valore 0.8.
Dunque le equazioni del modello di Hodgkin e Huxley possono essere
semplificate così:
CM
dv
= I(t) − (v − VNa )G Na m3∞ (v)(0.8 − n) − (v − VK )G K n 4 − (v − VL )g L
dt
τn (v)
dn
= n ∞ (v) − n
dt
Normalizzando le variabili e facendo qualche ulteriore semplificazione, il
modello si riduce a queste 2 ODE:
dv
v3
= v − − w + I(t)
dt
3
dw
= 0.08(v + 0.7 − 0.8w)
dt
Generalizzabili a queste due:
dv
= f (v) − w + I(t) , con f(v) polinomio di terzo grado
dt
dw
= a(bv − cw)
dt
31
Sistemi Dinamici e Modelli Neuronali
Marco Storace
Nonostante si perda il significato fisico e le variabili siano adimensionali,
manteniamo la notazione v per la variabile che riproduce la tensione di
membrana e I(t) per la variabile che emula la corrente esterna.
La variabile w (che rappresenta l'attivazione del sodio) ha una dinamica
più lenta della variabile v. I parametri a, b, c sono costanti, con a << 1.
L'ingegnere giapponese Jin-Ichi Nagumo realizzò nel 1962 un circuito
elettronico (contenente un diodo tunnel per realizzare la nonlinearità
cubica) governato dalle equazioni di FitzHugh, per cui il modello è noto
con entrambi i nomi.
Anche il modello di Morris-Lecar (Cathy Morris e Harold Lecar, 1981) è
una riduzione del modello di Hodgkin e Huxley, in cui si considera il
canale calcio anziché quello sodio:
CM
dv
= I(t) − (v − VCa )G Ca m ∞ (v) − (v − VK )G K n − (v − VL )g L
dt
dn
= λ n (v)[n ∞ (v) − n]
dt
con
⎡
⎛ v − V1 ⎞ ⎤
m ∞ (v) = 0.5 ⎢1 + tanh ⎜
⎟⎥
⎝ V2 ⎠ ⎦
⎣
⎡
⎛ v − V3 ⎞ ⎤
n ∞ (v) = 0.5 ⎢1 + tanh ⎜
⎟⎥
V
⎝
⎠⎦
4
⎣
λ n (v) =
⎛ V − V3 ⎞
1
cosh ⎜
⎟
T0
⎝ 2V4 ⎠
Parametri (per un particolare tipo di neurone di un crostaceo):
CM = 5 [μF/cm2]
GCa = 4.4 [mS/cm2]; GK = 8 [mS/cm2]; gL = 2 [mS/cm2];
32
Sistemi Dinamici e Modelli Neuronali
Marco Storace
VCa = 120 [mV]; VK = −84 [mV]; VL = −60 [mV];
V1 = −1.2 [mV]; V2 = 18 [mV]; V3 = 2 [mV]; V4 = 30 [mV];
T0 può variare in un ampio range per cellule diverse ed è molto sensibile
alla temperatura. Si hanno comportamenti diversi dal punto di vista delle
biforcazioni al variare di I per T0 = 15 [ms] e per T0 = 25 [ms].
Il modello di Hindmarsh-Rose (1984) è un modello fenomenologico (non
derivato direttamente da misure/osservazioni sperimentali) che può essere
visto sia come una generalizzazione delle equazioni di FitzHugh sia come
una semplificazione del modello di Hodgkin e Huxley.
Il modello permette di riprodurre anche l'adattamento della frequenza di
sparo, oltre ai comportamenti di regime più tipici (stazionario, spiking
periodico, bursting periodico, spiking irregolare o caotico).
È descritto dalle seguenti equazioni, espresse in termini di variabili
adimensionali:
x = y − x 3 + bx 2 + I − z
y = 1 − 5x 2 − y
z = μ[s(x − x rest ) − z]
dove x gioca il ruolo della tensione di membrana, I quello della corrente, b
è un parametro di controllo che permette di cambiare il comportamento
dinamico del sistema, μ controlla la velocità di variazione della variabile
(lenta) z ossia l'efficienza dei canali lenti nello scambiare ioni, s permette
di controllare l'adattamento della frequenza di spiking, xrest corrisponde al
potenziale di riposo.
Al variare dei parametri, il modello produce dinamiche di vario tipo. In
particolare ci concentreremo sui parametri I e b.
33