Politecnico di Torino
II Facoltà di Ingegneria
Corso di Meccanica
Prof. A. Sparavigna
Tutoraggio
1
Teoria delle vibrazioni libere senza smorzamentoa
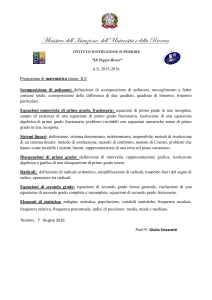
Figura 1. Schemi illustrativi sistema massa concentrata – molla
Si consideri il sistema rappresentato in figura 1 costituito da una massa puntiforme m, vincolata ad
una parete mediante una molla di rigidezza k, libera di muoversi soltanto lungo la verticale (fig. 1a)
oppure lungo un piano orizzontale privo di attrito (fig. 1b). Sia l0 la lunghezza a riposo della molla
mentre xst indichi la deformazione statica della molla dovuta a al peso mg.
L'equazione del moto della massa m si ottiene imponendo che tutte le forze agenti su di essa
formino un siste a di forze equilibrato. Le forze in gioco sono:
Figura la:
forza peso;
forza di richiamo elestico;
risultante del/e forze d'inerzia.
Figura 1 b:
forza peso;
reazione vincolare piano orizzontale;
forza di richiamo elestico;
risultante del/e forze d'inerzia.
a
Tratto dal testo Dinamica delle macchine – Editore Levrotto & Bella – Autori: Riccardo Malvano, Furio Vatta
2
Politecnico di Torino
II Facoltà di Ingegneria
Corso di Meccanica
Prof. A. Sparavigna
Tutoraggio
Nel caso rappresentato in figura 1a, si supponga che in un certo istante la massa si muova verso il
basso; sia x il suo spostamento dalla posizione diequilibrio statico, mentre x sia la coordinata che
misura sempre lo spostamento della massa, riferito però ad un’origine coincidente con la sezione
nella quale è posto l’estremo fisso della molla. la molla subisce un allungamento x l0 e quindi
l’equazione del moto è data da:
mx k x l0 mg 0 .
Poiché però x l0 xst x dove x st
mg
(legge di Hooke) l’equazione del moto assume la
k
seguente forma:
mg mx k xst x 0
mx kx 0 b.
(1)
Procedendo in modo analogo si consideri ora il caso di spostamento orizzontale (fig. 1b) e si
supponga che il corpo si muova verso destra; sia x la misura di questo spostamento calcolata a
partire dall posizione di riposo (molla scarica), mentre sia x la coordinata che individua la
posizione della massa rispetto ad un riferimento con origine nell’estremo fisso della molla.
L’equazione di equilibrio dinamico si scrive imponendo che sia nulla la risultante di tutte le forze
applicate alla massa m ed agenti secondo la direzione orizzontale (per l’equilibrio verticale mg=N
con quest’ultima che è la reazione del piano orizzontale in caso di attrito nullo). Scrivendo
l’equilibrio in direzione orizzontale si ha:
mx k ( x l0 ) 0
e poiché x l0 x si ottiene nuovamente la (1). Risulta evidente, da quanto è stato ricavato, che i
termini costanti, come la lunghezza a riposo della molla o il peso del sistema, possono non essee
considerati; essi quindi non compaiono nell’equazione di equilibrio, ma occorre tener presente che
in questo caso la coordinata x(t) rappresenta solo lo spostamento del sistema dalla sua condizione di
riposo.
b
con
x si deve intendere un’accelerazione che ha direzione parallela allo spostamento x.
3
Politecnico di Torino
II Facoltà di Ingegneria
Corso di Meccanica
Prof. A. Sparavigna
Tutoraggio
Il moto libero del sistema è dato quindi dalla soluzione di un’equazione differenziale lineare
omogenea del secondo ordine. Poiché (vedere soluzione matematica di questo tipo di equazioni) le
radici dell’equazione caratteristica sono immaginarie, l’integrale generale della (1) è dato da :
xt A cos n t Bsen n t C cos( n t )
(2)
dove con il termine n si è indicata la pulsazione propria del sistema. Si può inoltre notare come la
(2) sia l’equazione di un moto armonico.
Volendo ricavare il valore della pulsazione propria del sistema si può procedere in questo modo:
dalla (2) ricavare l’espressione dell’accelerazione x(t ) ;
sostituire le espressioni di x(t) e x(t ) nella (1);
scoprire che esiste un termine tale per cui la (1) riscritta si annulla quando ad annullarsi è
tale termine.
In formule matematiche:
xt n2 A cos n t n2 Bsen n t
m( n2 A cos n t n2 Bsen n t ) k A cos n t Bsen n t 0
A cos n t k m n2 Bsen n t k m n2 0
quindi se k m n2 0 l’ultima equazione è sempre verificata. Da questa espressione si può
calcolare il valore della pulsazione propria del sistema come:
n
Noto il periodo si ha che n
2
T
k
m
(3)
ed è questa la formula che permette di ricavare
sperimentalmente dapprima la pulsazione propria n di un sistema massa-molla e poi la sua
costante elestica k.
Volendo ora dimostrare come per un pendolo semplice sia T 2 l g si pensi al filo del pendolo
come ad una molla inestensibile per la quale sia k
mg
e si sostituisca il valore di questa rigidezza
l
nella (3). In questo modo si giunge a dire che n g l e quindi ad avere la dimostrazione.
Politecnico di Torino
II Facoltà di Ingegneria
Corso di Meccanica
Prof. A. Sparavigna
Tutoraggio
4
Esempio di applicazione delle equazioni cardinali della dinamica
In questa parte verranno esaminate le equazioni cardinali della dinamica applicate a delle masse in
movimento. Si noti che nel piano queste equazioni sono generalmente valide per traslazione
verticale, traslazione orizzontale e rotazione, ma nel problema in esame non comparirà mai
l’equazione cardinale relativa alla rotazione.
Esercizio
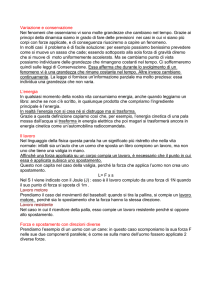
Figura 2. Sistema di masse in equilibrio
Tre blocchi di massa m1=2 kg, m2=1 kg, m3=3 kg sono disposti come in figura 2. Il piano
orizzontale è privo di attrito. I pioli P sui quali slittano i fili che collegano le masse non offrono
attrito tangenziale. I fili si suppongano inestensibili e di massa trascurabile. Calcolare
l’accelerazione con cui si muoverebbero le masse se un evento perturbasse l’equilibrio. Calcolare
inoltre i valori che assume la tensione nei due tratti di filo.
Soluzione e considerazioni
Per risolvere correttamente il problema è necessario scrivere le equazioni di corpo libero per i corpi
1, 2 e 3. per poter fare ciò bisogna però prima imporre un verso degli spostamenti. Analizzando il
sistema partendo dalla massa 1, si ipotizzi un verso degli spostamenti che porti questa massa verso
il basso. Il verso ipotizzato provocherà quindi un movimento da sinistra verso destra della massa 2
ed una salita della massa 3.
Politecnico di Torino
II Facoltà di Ingegneria
Corso di Meccanica
Prof. A. Sparavigna
Tutoraggio
5
Imposto il verso degli spostamenti è ora possibile scrivere le equazioni di corpo libero per ciascuno
dei tre corpi. Si noti che per ciascun corpo viene scritto l’equilibrio dinamico nella direzione dello
spostamento.
Corpo 1:
forza peso concorde con il verso dello spostamento (verso il basso);
tensione T1 della fune discorde con il verso dello spostamento (verso l’alto);
forza d’inerzia della massa pari a ( m1 a ) e discorde allo spostamento (verso l’alto).
Corpo 2:
forza peso;
reazione N del piano orizzontale uguale e contraria alla forza peso;
tensione T1 della fune concorde con il verso dello spostamento (da sinistra verso destra);
tensione T2 della fune discorde con il verso dello spostamento (da destra verso sinistra);
forza d’inerzia della massa pari a ( m2 a ) e discorde allo spostamento (da destra verso
sinistra).
Corpo 3:
forza peso (verso il basso);
tensione T2 della fune concorde con il verso dello spostamento (verso l’alto);
forza d’inerzia della massa pari a ( m3 a ) e discorde allo spostamento (verso il basso).
Dall’analisi delle forze presenti su ciascun corpo è possibile scrivere:
m 2 g N
m g T m a 0
1
1
1
T1 T2 m2 a 0
m3 g T2 m3 a 0
(1)
Il sistema (1) è tale da permettere la risoluzione completa del problema. Dalle ultime tre equazioni è
infatti dapprima possibile ricavare il valore dell’accelerazione a che una volta noto permetterà di
ricavare i valori delle tensioni T1 e T2 presenti sui due rami di fune. E’ altresì importante notare
come la prima delle quattro equazioni sia ininfluente nel calcolo dei parametri richiesti dal
problema e che quindi possa anche essere trascurata nella scrittura dello stesso. Si noti anche come
in tale equazione non compaiano temini dinamici (ovvero forze d’inerzia). Tale equazione è quindi
definibile come cardinale della statica nella direzione verticale per il corpo 2.