Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
CAP. IV – METODOLOGIE APPLICATIVE – COMPONENTI – SISTEMI
ELETTRICI
(BOZZA)
IV.1 Generalità
In questo capitolo verranno descritte alcune delle principali ricadute applicative e
procedurali direttamente collegate alla teoria delle reti sviluppata precedentemente.
Ovviamente il percorso storico che ha portato alla realizzazione di apparecchiature e
sistemi elettrici di interesse sociale e strategico (basta pensare alle pressanti richieste
dell’industrializzazione e dell’urbanizzazione tipica del fine Ottocento o lo sforzo
tecnologico legato alla partecipazione alle due Guerre Mondiali) ha visto sì
importanti realizzazione ma anche continui “ritorni” sull’impostazione dello studio
di problematiche elettriche e dei modelli generali con ulteriori ricadute applicative.
Con una visione estremamente rapida possiamo così sintetizzare tale percorso
storico:
a) nella seconda metà del Settecento e nella prima metà dell’Ottocento sono state
poste le basi (non solo per l’impulso dell’Illuminismo) per un raccordo tra la
presentazione semi-empirica dei fenomeni elettrici ed un inquadramento degli
stessi in modelli matematici di profonda validità e portata; tale percorso è
stato agevolato senz’altro dalla presenza (spesso tormentata) di personalità
scientifiche di impareggiabile rilievo, anche in assenza di qualsiasi supporto,
incentivo o mezzo di comunicazione1; le applicazioni “elettriche” si limitarono
allo studio dei processi chimici ed ad limitato numero di dispositivi isolati.
b) nella seconda metà dell’Ottocento si sentì prepotentemente da un lato la
necessità di dotare le fabbriche di macchinari che consentissero tassi di
produzione più elevata e minori ingombri, dall’altro di fornire energia ed
illuminazione alle stesse fabbriche ed ai centri abitati con alimentazione
elettrica a largo raggio e quindi con interconnessioni a largo raggio; è del 1892
la prima linea elettrica (tranviaria) da Roma a Tivoli a tensione stazionaria di
550 V; da un lato si svilupparono le grandi macchine rotanti e statiche per la
generazione, la trasmissione, la distribuzione e l’utilizzazione dell’energia
elettrica, dall’altro si assestano in misura decisiva i modelli generali della
Fisica Matematica, in particolare dell’Elettromagnetismo (James Clerk
Maxwell, 1873)
1
Si potrebbero portare numerosissimi esempi; mi limiterò a citare – perché poco conosciuta – la vita di
disagi di Michael Faraday (1791-1867), i cui studi e le cui intuizioni a tutto campo nel mondo della
Chimica e della Fisica sono fondamentali e di attualissimo interesse. E’ forse più nota la vicenda
politica di Benjamin Franklin che fu costretto – esule presso la Corte in agonia del Re di Francia– a
proporre in inglese ed francese le sue idee scientifiche ed il suo laboratorio elettrico.
1
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
IV.1 Cenni di conversione elettromeccanica
La conversione elettromeccanica si basa sulla espressione della forza di Lorentz:
Fq qE v B
2
Se consideriamo una carica q in un conduttore filiforme perfetto (all’interno del quale
in campo elettrico E=0), e supponiamo di muovere, con un’azione esterna, il conduttore
stesso in un campo magnetico, ogni carica sarà soggetta a una forza ortogonale alla
direzione del moto ed al campo magnetico (tale forza sarà nulla se il moto avviene
lungo le linee del campo magnetico). Le cariche potranno muoversi nel volume
occupato dal conduttore (immaginando per semplicità che non possano abbandonare
lo stesso). Potremo quindi, a seconda dei casi, fare diverse considerazioni
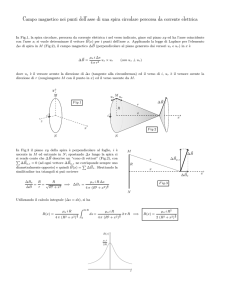
1) Nel caso di una barretta rettilinea AB di conduttore che si muova di moto
uniforme “trasversalmente” (cioè su un piano ortogonale) ad un campo
magnetico B uniforme, tutte le particelle libere del conduttore sono soggette a
forze che le spingono verso gli estremi, dove si accumuleranno fino al
raggiungimento di una situazione di equilibrio tra il campo di repulsione
coulombiano e il campo della forza di Lorentz. Nella situazione di fig.1 viene
evidenziata la separazione delle cariche. Da notare esplicitamente che la forza
di Lorentz agisce sulle cariche nel conduttore, mentre il campo coulombiamo
generato dalla separazione delle cariche può essere “sentito” e misurato in
tutto lo spazio. Quindi si può valutare la tensione indotta
B
B
Fq
t dl v B t dl lungo la barretta attraverso la misura della tensione
q
A
A
lungo un percorso esterno alla barretta
B
A
Fq
q
t AB dl VAB
AB , solidale con la stessa:
B
E t dl
A,
. Nell’intervallo di tempo dt la barretta
AB
avrà coperto una “superficie” di larghezza vdt, tagliando idealmente le linee
di flusso di B. Per tale ragione si parla in gergo di tensione indotta da flusso
tagliato:
d tagliato
dt
d
( Bv dt ) LAB ;
dt
Fq
+++++++++++++++
A
+++++++++++++++
+
+++++++++++++++
+
v
+
+++++++++++++++
+
+++++++++++++++
B
+++++++++++++++
B
+++++++++++++++
2
B
v B t dl vB LAB
A
B
v
+
+
+
+
+
+
+
+
+
+
+
+
In questa espressione non sono considerate forze di natura diversa (chimica, termica, ..)
2
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
Fig.1
Fig.2
2) Consideriamo ora (fig.2) una spira quadrata (percorso chiuso) immersa in un
campo magnetico uniforme e ruotante con velocita angolare costante Ω ad es.
in senso orario attorno ad un asse ortogonale al piano del foglio. Sulle cariche
della spira agirà, a seconda del tratto della spira e della sua posizione, una
forza di Lorentz variabile in modulo e verso; se la spira si trova in posizione
“orizzontale”, la forza di Lorentz è nulla dappertutto in quanto v e B sono
paralleli; in posizione verticale la forza è massima ed è diretta verso
l’osservatore per i punti della porzione superiore della spira, in verso opposto
nella porzione inferiore. Con forza di intensità variabile le cariche saranno
quindi spinte a “circolare” nella spira 3. Il tutto è riconducibile alla valutazione
della forza elettromotrice indotta (legge di Faraday-Neumann)
Fq
d
E
t
dl
i
q t dl dt . Infatti, quando il flusso Φ concatenato con la spira è
massimo, la forza è nulla; nel tempo il flusso varia con legge cosinusoidale. La
spira chiusa consente una migrazione di cariche, ossia una corrente elettrica
che, con il riferimento fissato in fig.2, è positiva quando il flusso decresce, cioè
per mezzo giro. In tale intervallo, il suo effetto è la creazione di un campo
magnetico di “rinforzo”, ovverosia essa tende a “mantenere” il flusso
concatenato.
3) Per avere ovunque ortogonalità tra campo di velocità e campo magnetico, si
può modificare la distribuzione del campo magnetico avvolgendo la spira su
supporto ferromagnetico e facendola ruotare in un traferro tra espansioni o
“scarpe” polari magnetiche (Nord e Sud), sagomate in modo tale che il campo
magnetico risulti praticamente radiale. In tal caso la forza di Lorentz risulta
praticamente costante nel passaggio sotto una scarpa polare, inverte il senso
passando sotto l’altra. I due lati ortogonali al foglio danno luogo ad una
tensione indotta lungo il loro asse non nulla, per cui si dicono attivi; si
sottolinea che sugli altri due lati la forza di Lorentz non è nulla, ma tensione
lungo il loro asse è nulla. Questo è il principio di un possibile alternatore
elettrico o generatore (trasforma energia meccanica in energia elettrica).
4) Se la spira ferma, con il riferimento fissato in fig.2, è interessata da una
corrente di intensità i(t), possiamo immaginare che il campo di velocità sia
quello di migrazione delle cariche all’interno del conduttore; quindi le stesse
sono soggetta ad una forza ortogonale al conduttore attivo e quindi ad una
coppia motrice. Se la spira è libera di ruotare, si mette in movimento (principio
del motore elettrico)4.
3
In realtà nei due tratti di spira ortogonali all’asse di rotazione le cariche sono spinte temporaneamente verso le
pareti.
4 Sui due lati non attivi ha luogo una separazione di cariche che si attestano sulle pareti. Vi sono sonde di misura
del campo magnetico che si basano su questo principio (effetto Hall).
3
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
5) Se il campo B è un campo stazionario (di un magnete permanente o di un
elettromagnete) ed i è costante, siamo nel caso del motore a corrente continua;
6) Se il campo B è variabile con legge sinusoidale, la corrente i(t) può essere
ottenuta per induzione elettromagnetica; è possibile far sì da avere una coppia
motrice significativa ed avremo il motore in corrente alternata;
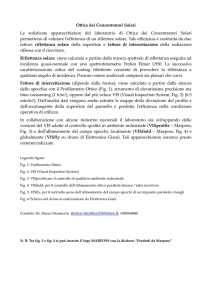
7) Possiamo ottenere una corrente indotta in una spira libera di ruotare (rotore)
attraverso un campo rotante (motore asincrono); per ottenere un campo rotante
basta considerare l’effetto di tre solenoidi disposti simmetricamente (con assi a
120°) sulla periferia di uno statore (parte fissa della macchina), alimentati da
una terna di correnti simmetriche (sfasate nel tempo di 120°) a pulsazione Ω.
Ogni solenoide produce in ogni punto del traferro un campo sinusoidale a
pulsazione Ω diretto lungo l’asse geometrico del solenoide (z1,z2,z3); tale
campo può essere scomposto in due campi rotanti (diretto ed inverso) con
velocità angolare +Ω e - Ω, di intensità costante pari alla metà del valore
massimo del campo. Il contributo al campo del secondo solenoide può a sua
volta essere scomposto un un campo rotante diretto ed uno inverso, ma la
posizione spaziale e del secondo avvolgimento e la fase della seconda
corrente fanno sì che la componente diretta sia allineata alla prima e la
componente inversa sia sfasata di 120° rispetto alla prima; ripetendo il
discorso per il terzo solenoide si può riconoscere che le tre componenti dirette
si sommano dando luogo ad un campo risultante di valore pari a 3/2 rispetto a
quello del singolo avvolgimento, mentre le componenti inverse danno istante
per istante somma nulla (in fig.3, la situazione per t=0).
8) Per quanto detto una terna di avvolgimenti disposti simmetricamente lungo la
periferia interna dello statore, alimentata da una terna simmetrica di tensioni,
equivale ad un magnete rotante (Nord-Sud) e pertanto viene definito coppia di
poli. Se gli avvolgimenti non vengono distribuiti sull’intera circonferenza, ma
su una parte 1/p dell’angolo giro, avrò una macchina a p coppie di poli.
Disponendo in modo regolare gli avvolgimenti sulla periferia interna di
statore, si avrà alternanza di poli Nord e poli Sud; il passo polare (differenza
angolare tra due Nord consecutivi) è pari a 2π/p. La velocità di rotazione
equivalente del campo rotante è ω=Ω/p e quindi la velocità di sincronismo
della macchina è p volte più bassa (per p=1 e f=50 Hz la velocità è di 50 giri/s
ossia 3000 giri al minuto, per p=4 la velocità è 750 giri al minuto).
4
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
1z1
B1=BM cosΩt 1z1
B1i
B1d
Ω
B3d
-Ω
Ω
B2d
B3=BM cos(Ωt+2π/3) 1z3
B1 B 2 B3 B1d B 2d B3d
B3i
B2i
3
BM
2
1z2
1z3
B2=BM cos(Ωt-2π/3) 1z2
fig.IV.3
IV.2 Cenni sulla macchina sincrona
La macchina sincrona si presenta come in fig.IV.4:
-
sul rotore è generalmente installato l’induttore, che con il suo movimento può
creare un campo magnetico rotante e quindi indurre tre tensioni simmetriche
in tre avvolgimenti disposti simmetricamente sullo statore (generatore
sincrono o alternatore);
-
l’induttore può essere a coppie di poli salienti o liscio: le coppie polari
equivalenti sono ottenute mediante avvolgimenti avvolti su nuclei
ferromagnetici ben evidenziati ed opportunamente sagomati, oppure con
gruppi di spire paralleli disposte in cave di rotore, costituenti una sorta di
solenoide corto;
-
sulla periferia interna dello statore (indotto) sono ricavate delle cave per
l’alloggiamento dei conduttori di fase terminanti all’esterno;
-
l’induttore a poli salienti è sagomato in modo che il profilo del campo al
traferro sia sinusoidale sul periodo pari a doppio del passo polare
-
sistemando lungo la periferia interna dello statore, in modo simmetrico, i
conduttori di tre avvolgimenti, dal moto del rotore si può ottenere, a vuoto,
una terna simmetrica di tensioni (funzionamento da alternatore sincrono
trifase) .
-
alimentando gli avvolgimenti di statore con una terna simmetrica di correnti,
possiamo avere il funzionamento da motore sincrono, in cui, fissata la
frequenza di alimentazione, è fissato il numero di giri n=60f/p dove f è la
frequenza di alimentazione e p il numero delle coppie polari; è molto meno
diffuso del motore asincrono di cui nel seguito. Ovviamente il motore sincrono
5
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
va inizialmente portato a velocità molto prossima al sincronismo (ad esempio,
viene fatto partire “a folle” come motore asincrono oppure a mezzo di un
motore ausiliario di lancio). In fig.IV.5 è riportata la macchina a traferro
“linearizzato”; si mette in evidenza la distanza lungo il traferro tra due
espansione N-S adiacenti (semipasso polare τ)
fig,IV.4 – Configurazione del rotore della macchina sincrona (induttore) a poli
salienti (e: espansioni polari; n: nuclei ferromagnetici) e a “poli lisci”.
fig,IV.4 – Configurazione del rotore della macchina sincrona (induttore) apoli
salienti; è possibile sagomare le scarpe polari in modo da avere una forma
sinusoidale del campo magnetico al traferro (induzione radiale).
In fig. IV.5 è riportata la caratteristica d’indotto (valore efficace della tensione
concatenata sui tre avvolgimenti di statore) in funzione della intensità di corrente
di eccitazione che genera il campo di rotore; in realtà, a seconda del tipo di carico,
si avranno intensità di corrente diverse per fase e quindi occorrerà considerare la
composizione del campo di rotore con quello generato dall’indotto; per carico
ohmico-induttivi la reazione d’indotto provoca una diminuzione del flusso per
polo e quindi una diminuzione delle tensione ai morsetti; nel caso ohmicocapacitivo tale tensione aumenta.
In fig.IV.6 si riporta qualitativamente la caratteristica “esterna” dell’alternatore,
ovvero la variazione della tensione di uscita al variare dell’intensità della corrente
erogata. Anche in questo caso si nota l’influenza del tipo di carico. Considerazioni
6
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
più circostanziate portano alla individuazione di un circuito equivalente
all’alternatore ed alla definizione di una impedenza sincrona.
fig.IV.5 Caratteristica di carico
fig.IV.6 Caratteristica esterna
IV.3 La macchina asincrona
…………………………………
……………………………..
Campo rotante creato dalle correnti di statore di pulsazione ω con p terne di
bobine (coppie polari)
s
p
s r
: s=1 : rotore fermo; s=0 : rotore
s
al sincronismo ; s<0 : rotore lanciato oltre il sincronismo; s>1 : rotore fatto girare in
senso opposto al campo rotante
- Scorrimento tra campo rotante e rotore s
- Funzionamento da motore (s compreso tra 0 e 1) oppure da generatore (s<0 o
s>1)
- A rotore bloccato, rete equivalente simile a quella di un trasformatore
- A rotore in moto, rete equivalente riferita alle grandezze di statore a pulsazione
(ω) diversa da quella di rotore (s ω)
7
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
I 2s
E2 s
R22 ( sL2 d )
sE2
R22 ( sL2 d ) 2
E2
2
R2
2
( X 2d )
s
R2
1 s
R2 R2
s
s
Bilancio energetico
P1 PCu1 PFe1 Ps
PCu 2
1 s 2
Ps PFe2 PCu 2 Pm R2 I 22 R2
I2
s
sPs ; Pm (1 s ) Ps
rendimento di conversion e 2
Pm
1 s snom 0.05
Ps
8
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
CARATTERISTICHE MECCANICHE
Coppia motrice
1 s 2
R2
I 2
Pm
Pm
spE 22
sR2V12
s
R2
1
Cm
2
2
2
2
r s (1 s)
R
(
sX
)
R2 ( sX 2 d )
2
2
d
(1 s)
p
R2
V12
dC
2
2
0 R2 R2 ( sX 2 d ) sR2 2 X 2 d ( sX 2 d ) 0 s M s*
CM 2
ds
X 2d
L2 d
-
Per l’avviamento possiamo considerare una variazione di R2 (avviamento reostatico)
o una variazione della reattanza di dispersione (motore a doppia gabbia).
La regolazione di velocità non è ampia; possiamo considerare variazioni limitate
dello scorrimento. Altrimenti occorrerà variare il numero delle coppie polari.
9
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
Motore asincrono monofase
Si costruisce un secondo avvolgimento interessato da corrente sfasata rispetto
alla corrente dell’avvolgimento principale. In questo modo si potrà creare un campo
rotante sufficiente a far avviare il rotore che sarà soggetto ad una coppia significativa.
Basterà quindi creare un circuito ausiliario prevalentemente capacitivo
(condensatore di avviamento). Per piccole potenze.
10
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
IV.4 Cenni sulla macchina a corrente continua
…………………………………………………………………..
Principio della commutazione – Collettore -Tensione unidirezionale-Tensione
risultante
Flessibilità nel funzionamento da generatore (dinamo) e/o da motore-Reazione
d’armatura-Flessibilità dei sistemi di eccitazione: indipendente, parallelo, serie
Flessibilità della caratteristica meccanica
Svantaggi
…………………………………………………………………………………………………..
IV.5 CENNI SUI CONVERTITORI (elettronica di potenza)
IV.5.1 Circuiti raddrizzatori
Tra i bipoli fondamentali si è già accennato (§I.17) al diodo ideale e
reale5 (fig.IV.5.1): si hanno fenomeni significativi di conduzione (con
caratteristica non lineare) se la tensione tra anodo A è catodo C è positiva
(tratto © di “conduzione”), non si hanno praticamente fenomeni di
conduzione se tale tensione è negativa (tratto ® di “interdizione”, a meno di
non raggiungere valori di tensione eccessivi che determinano il collasso
(breadown) del componente) .
5
Un diodo reale viene realizzato attraverso una “giunzione P-N” di due strati di un materiale
tetravalente puro, semiconduttore intrinseco come il Silicio, uno drogato con materiale trivalente
(come il boro) che quindi rende lo strato ricco di “lacune elettroniche” (P è l’anodo) e l’altro drogato
con materiale pentavalente (quale l’antimonio) che quindi rende lo strato ricco di elettroni disponibili
per la conduzione (N è il catodo). Applicando una tensione positiva si avrà una agevole migrazione o
diffusione di elettroni verso l’anodo e “lacune” verso il catodo; la migrazione inversa è evidentemente
molto difficile.
11
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
A
VAC
vAC
anodo
i
I
diodo reale
diodo ideale
©
I
VAC
+ e(t)
catodo
Ru
vu
C
®
fig.IV.5.1
fig.IV.5.2
La caratteristica è fortemente asimmetrica; quindi, imponendo una tensione v AC
variabile (ad esempio sinuoidale) , l’intensità di corrente risulterà fortemente distorta
e viceversa. Se si alimenta con un generatore sinusoidale una serie diodo-resistore
(fig.IV.5.2), la caratteristica di fig. IV.5.1 andrà confrontata con quella del bipolo
“visto” dal diodo
v AC t e(t ) Ru i i
e(t ) v AC (t )
(IV.5.1)
R
Tale caratteristica è una retta che intercetta la zona di conduzione se e(t)>0, quella di
interdizione se e(t)<0 (fig. IV.5.3)
VAC
v AC t e(t ) Ru i
diodo reale
diodo ideale
©
v2
t
I
e
®
fig.IV.5.3
fig.IV.5.4
12
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
La tensione sul diodo risulterà trascurabile se e(t)>0, per cui la tensione sul resistore
v2 risulterà praticamente coincidente con e(t); se e(t) è minore di zero, risulterà invece
piccola l’intensità di corrente e quindi trascurabile la v2 (fig.IV.5.4, raddrizzamento ad
una semionda).
La tensione di uscita risulta quindi periodica con lo stesso periodo della e(t) – se
questa è periodica -, ma con un valore medio significativo; nel caso e(t) sia
sinusoidale di valore massimo EM e periodo T
1
V*
T
t1 T
1
v t dt E
AC
M
0,318 EM
t1
Anche l’intensità di corrente presenterà quindi un valore medio non nullo. Nel caso
(frequente) in cui la e(t) sia fornita attraverso un trasformatore su ferro (fig.IV.5.5),
questa circostanza potrebbe comportare saturazione del ferro e conseguente cattivo
funzionamento del trasformatore. Per tensioni non elevate si può ricorrere ad una
alimentazione “doppia” del resistore Ru considerando un trasformatore con
secondario a presa centrale (fig.IV.5.6), circuito a doppia semionda). Le due tensioni
v2 e v2* sono di uguale ampiezza ed in opposizione di fase; a vuoto (Ru infinita) le
correnti al secondario sono praticamente nulle perché i due diodi sono in antiserie;
per R finita,, il diodo D conduce per il semiperiodo in cui v è positiva (mentre v* è
negativa e quindi il diodo D* interdetto); per l’altro semiperiodo D* conduce e D è
interdetto. In tale caso, a parità di valore massimo EM della tensione di alimentazione
il valore medio nel periodo T raddoppia
1
V*
T
t1 T
2
v t dt E
AC
M
0,636 EM ;
t1
Tale valore risulta abbastanza prossimo al valore efficace della tensione di ingresso
sinusoidale (=0,707 EM) (fig.IV.5.7)
vAC
i
vAC
i
+
e=v
2
D
+
v
u
e=v2
Ru
vu
Ru
v2*
D*
fig.IV.5.5
fig.IV.5.6
13
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
vu
t
v*2
v2
fig.IV.5.7
Con questa soluzione si avranno correnti a valor medio non nullo nei
due avvolgimenti, significative in semiperiodi diversi; con opportune
disposizioni (ravvicinate) dei due avvolgimenti si potrà creare un campo
magnetico praticamente alternativo dovunque.
Per tensioni più elevate si potrà utilizzare il circuito di fig. IV.5.8 (ponte
di Graetz) con unico avvolgimento interessato da correnti alternative
14
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
+
e=v2
Ru
vu
fig. IV.5.8
Una versione polifase del circuito ad una semionda è presentata in
fig.IV.5.9; la tensione sul carico è rappresentata in fig. IV.5.10 nel caso
trifase. Come si nota, all’aumentare del numero delle fasi il valore
medio della tensione di uscita diventa sempre più prossima al valore
massimo e si riduce sempre più il fattore di ondulazione.
+ e1(t)
1
i1(t)
i2(t)
+ e2(t)
2
0
i3(t)
+ e3(t)
vu
Fig. IV.5.9
v
u
e3
t
e1
e2
Fig.IV.5.10
15
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
IV.5.2 Tiristori o SCR (Silicon Controlled Rectifier) – Il TRIAC (triode
for alternating current)
Il tiristore o SCR è un diodo controllato. La effettiva conduzione del
diodo, se ammessa, avviene solo se si invia un opportuno comando
(anche un “impulso”) di tensione sul terminale di controllo (gate G)
(fig.IV.5.11)
VAC
A
SCR reale
©
VAC
I
anodo
catodo
G gate
SCR ideale
C
I
®
fig.IV.5.11- Caratteristica di un tiristore
Il tiristore si comporta quindi come un interruttore a stato solido (in
chiusura); inoltre esso si interdice se l’intensitàC di corrente scende al
disotto di un valore di soglia; in caso di grandezze variabili, si interdice
sempre (e non si riaccende fino ad un nuovo comando sull’elettrodo di
controllo) se la intensità di corrente passa per lo zero. Il tempo di
“accensione” è di 1-4 μs, quello di “spegnimento” di 10-25 μs
Il TRIAC è costituito sostanzialmente da due SCR in antiparallelo, che
hanno l’elettrodo di controllo in comune. La conduzione può essere
A
attivata sia per tensioni positive
che negative (con impulsi positivi e
I
negativi). In fig. IV.5.12 è rappresentata la caratteristica reale e quella
ideale
VAC
VGC
G
C
16
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
vAC
VAC
TRIAC reale
©
TRIAC ideale I
VGC
®
fig.IV.5.12- Caratteristica di un triac
Come si vede si possono parzializzare i fenomeni di conduzione; il triac
quindi può funzionare come un regolatore di corrente sinusoidale
(alternata).
Per elevate correnti e tensioni si preferisce usare due tiristori separati in
antiparallelo, per meglio dissipare le perdite sul componente.
Costruttivamente il tiristore è costituito da un quadruplo strato
di semiconduttori p-n-p-n (fig. IV.5.13), con l'anodo collegato allo
stato p esterno, il catodo allo strato n opposto ed il gate al p intermedio.
L’iniezione di elettroni attraverso l’elettrodo di controllo consente la
conduzione anche attraverso la giunzione inversa.
fig.IV.5.13
L'impiego tipico si ha nei raddrizzatori di tensione controllabili, in grado
di fornire tensioni continue regolabili da una tensione alternata fissa.
Altri impieghi si hanno negli inverter e nei convertitori di tensione
17
Anno Accademico 2009/2010 – CdL in Ingegneria Meccanica (M-Z)
alternata. Il circuito di innesco degli SCR fa si che questo si trova in
ritardo rispetto alla tensione anodo-catodo; questo provoca un
frazionamento della tensione raddrizzata (il cosiddetto Controllo di
fase)..
Altri fondamentali componenti dei circuiti di potenza sono alcuni tipi di
transistori. Nel caso di tali componenti (funzionalmente simili a quelli
impiegati nei circuiti elettronici di segnale) si è in presenza di giunzioni
multiple PNP o NPN in cui i due strati esterni sono indicati come
emettitore e collettore, lo strato centrale (base) regola il meccanismo di
conduzione collettore-emettitore.
Si rinvia ad altra occasione la descrizione del funzionamento dei
transistori di segnale e di potenza. Tra questi ultimi preme tuttavia,
segnalare gli IGBT (Insulated Gate Bipolar Transistor) di recentissima
introduzione per le applicazioni nel campo della trazione ferroviaria,
interessati da correnti di intensità superiori a 1000 A e tensioni superiori
a 6000 V (fig. IV.5.14)
fig. IV.5.14 – IGBT
...................................................
...............................................
18