Corso di Sistemi di telecomunicazione
A.A. 2009/2010
TEORIA DELLA STIMA
Ref. ‘Detection, Estimation and Modulation
Theory, Part I’, H.L.Van Trees, ed. John
Wiley&Sons, Inc. 1968
Prof. C. Regazzoni
1
CONTENUTI
• Introduzione
• Parametri casuali: stima Bayesiana
• Stima di parametri non casuali
• Stima a massima verosimiglianza
• Disuguaglianza di Cramer-Rao
• Limite inferiore del minimo MSE
• Stima di parametri multipli
• Ipotesi composta
2
INTRODUZIONE
• Nella teoria della decisione viene considerato un
problema in cui si presenta una tra diverse ipotesi;
• Come risultato di una particolare ipotesi, veniva
osservato una variabile casuale vettoriale r.
• Basandoci sulla nostra osservazione, occorreva
cercare di scegliere l’ipotesi vera.
• Adesso consideriamo il problema della stima di
parametri
3
INTRODUZIONE
Il problema della stima: esempio
• Vogliamo misurare una tensione a ad un certo istante
di tempo;
• da considerazioni fisiche sappiamo che la tensione è
tra -V e +V volt;
• La misurazione della tensione è corrotta da rumore
che può essere modellato come variabile casuale n
indipendente con distribuzione Gaussiana a media
nulla;
• La variabile osservata è:
r an
• La densità di probabilità che governa il processo
dell’osservazione è, in questo caso:
( R A )2
pr|a ( R | A ) pn ( R A )
exp
2 n
2 n2
1
Il problema della teoria della stima consiste
nell’osservare r e stimare a
4
INTRODUZIONE
Il problema della stima
• L’esempio precedente mostra le caratteristiche
principali del problema della stima;
• Un modello per il problema generico della stima è
mostrato nella seguente figura:
5
INTRODUZIONE
Il problema della stima
• Il modello ha 4 componenti:
1. Spazio dei parametri
L’uscita della sorgente è un parametro (o variabile).
Noi vediamo questa uscita come un punto nello
spazio dei parametri. Nel caso di un singolo
parametro, questo corrisponde ad un segmento nella
retta:
A
2. Mappaggio probabilistico dallo spazio dei
parametri allo spazio delle osservazioni
Questa componente è la legge probabilistica che
governa l’effetto di a sull’osservazione.(es rumore)
3. Spazio delle osservazioni
L’osservazione è un punto denotato dal vettore R.
4. Regola di stima
Dopo avere osservato R, vogliamo stimare il valore
del parametro a. Denotiamo la stima con:
â( R )
Studieremo diverse regole di stima e la loro
implementazione
6
PARAMETRI CASUALI: STIMA DI BAYES
• Nel problema del decisore di Bayes alle quantità che
dobbiamo specificare sono assegnati dei costi Cij e
delle probabilità a priori Pi;
• La matrice dei costi assegna un costo ad ogni possibile
azione da intraprendere, data ogni possibile ipotesi vera
• Nel problema della stima a e
â( R )sono variabili
continue;
occorre assegnare un costo a tutte le possibili coppie
[a, â( R ]) nell’intervallo di interesse.
• Il costo è una funzione a due variabili C(a, â);
• In molti casi di interesse è realistico assumere che il
costo dipenda solo dall’errore di stima, che è:
a ( R ) â( R ) a
• La funzione di costo C(a) è funzione di un’unica
variabile.
7
PARAMETRI CASUALI: STIMA DI BAYES
• Nella seguente figura sono mostrati alcuni esempi di
funzioni di costo:
C( a ) a2
Un costo elevato è assegnato
se l’errore è elevato.
C( a ) | a |
0
|
a
|
2
C( a )
1 | a |
2
8
PARAMETRI CASUALI: STIMA DI BAYES
• La funzione di costo viene scelta tenendo conto di due
fattori:
1. Vorremmo che la funzione di costo sia coerente
con la natura del problema (richieste dell’utente);
2. Vorremmo che la funzione di costo sia tale per cui il
problema della stima risulti analiticamente
trattabile (lo scopo è trovare una stima che
minimizzi il valore aspettato del costo).
• In pratica, le funzioni di costo rappresentano un
compromesso tra i due obiettivi sopra citati.
• Analogamente alle probabilità a priori del problema
della decisione, nel problema della stima abbiamo una
densità di probabilità a priori pa(A).
• Assumeremo che pa(A) sia nota; nel caso che non fosse
nota, può essere adottata una procedura analoga al
test minimax.
9
PARAMETRI CASUALI: STIMA DI BAYES
• Una volta specificate la funzione di costo e la
probabilità a priori, possima screivere un’espressione
per la funzione di rischio:
R EC [ a ,â( R )] dA C [ A â( R )] pa ,r ( A,R )dR
• La media è eseguita sulla variabile a e sulle variabili
osservate r.
• La stima di Bayes è la stima che minimizza il rischio.
• Consideriamo il caso in cui la funzione di costo è
rappresentato dall’ errore quadratico. Il rischio
in questo caso è:
R ms dA [ A â( R )] 2 pa ,r ( A,R )dR
• La densità congiunta può essere riscritta come segue:
pa,r ( A, R) pr (R) pa|r ( A | R)
R ms pr ( R )dR [ A â( R )] 2 pa|r ( A | R )dA
10
PARAMETRI CASUALI: STIMA DI BAYES
• L’integrale più interno della funzione di rischio a minimo
MSE e Pr(R) sono non negativi
possiamo minimizzare la funzione di rischio
minimizzando l’integrale più interno.
• Denotiamo la stima a minimo MSE con a ( R )
ˆms
• Per trovare la stima differenziamo l’integrale interno
rispetto ad aˆ ( Re) poniamo il risultato uguale a 0:
d
2
[ A aˆ (R )] pa|r ( A | R )dA
daˆ
2 Apa|r ( A | R )dA 2aˆ (R ) pa|r ( A | R ) dA
• Ponendo il risultato uguale a zero ed osservando che il
secondo integrale è uguale a 1, abbiamo:
â ms ( R ) Apa|r ( A | R ) dA
• Questo minimo è unico, poiché la derivata seconda
della funzione da minimizzare è uguale a due;
• La stima è uguale alla media della densità a posteriori.
11
PARAMETRI CASUALI: STIMA DI BAYES
• Ricaviamo ora la stima di Bayes per il criterio del
valore assoluto dell’errore:
R abs pr ( R )dR [| A â( R ) |] pa|r ( A | R )dA
• Per minimizzare l’integrale più interno scriviamo:
I( R )
â( R )
[ â( R ) A( R )] pa|r ( A | R )dA
[ A( R ) â( R )] pa|r ( A | R )dA
â( R )
• Differenziando rispetto a â(R) e ponendo il risultato
uguale a zero, abbiamo:
âabs ( R )
pa|r ( A | R )dA
pa|r ( A | R )dA
âabs ( R )
• Questa è la definizione del mediano della densità a
posteriori.
12
PARAMETRI CASUALI: STIMA DI BAYES
• Ricaviamo ora la stima di Bayes nel caso di costo
uniforme:
âunf ( R ) / 2
R unf pr ( R )dR 1
pa|r ( A | R )dA
â ( R ) / 2
unf
• Per minimizzare questa equazione, massimizziamo
l’integrale più interno.
• Di particolare interesse è il caso in cui è
arbitrariamente piccolo, ma non zero.
• Un andamento tipico di densità di probabilità a
posteriori è mostrato nella seguente figura:
13
PARAMETRI CASUALI: STIMA DI BAYES
• Si vede che per piccolo, la migliore stima è il valore
di A per cui la densità di probabilità a posteriori ha il
suo massimo;
• Denotiamo la stima per questo caso particolare con
âmap(R), la stima massima a posteriori.
• Per trovare la stima massima a posteriori, dobbiamo
conoscere dove si trova il massimo della probabilità
condizionale. Poiché il logaritmo è una funzione
monotona, possiamo cercare il massimo di ln[pa|r(A|R)]
• Se il massimo cade nell’intervallo di valori di A
permesso e ln[pa|r(A|R)] ha una derivata prima continua,
allora una condizione necessaria, ma non sufficiente, per
un massimo può essere ottenuta differenziando
ln[pa|r(A|R)] rispetto ad A e ponendo il risultato uguale
a zero:
ln[ pa|r ( A | R )
A
0
(1)
A â( R )
14
PARAMETRI CASUALI: STIMA DI BAYES
• L’equazione (1) è l’equazione MAP;
• Dobbiamo cercare di verificare che la soluzione
ottenuta sia effettivamente il massimo assoluto.
• Possiamo riscrivere l’espressione di pa|r(A|R) per
cercare di separare la variabile osservata R dalla
conoscenza a priori:
pa|r ( A | R )
pr|a ( R | A ) pa ( A )
pr ( R )
• Facendo il logaritmo:
ln[ pa|r ( A | R )] ln[ pr|a ( R | A )] ln[ pa ( A )] ln[ pr ( R )]
• Per la stima MAP siamo interessati solo nel trovare il
valore di A in cui il termine a sinistra è massimo;
• Siccome l’ultimo termine a destra non è funzione di A,
possiamo considerare solo la funzione:
l( A ) ln[ pr|a ( R | A )] ln[ pa ( A )]
(2)
15
PARAMETRI CASUALI: STIMA DI BAYES
• Il primo termine dell’equazione (2) descrive la
dipendenza di R da A e il secondo termine descrive
la conoscenza a priori.
• L’equazione MAP può essere riscritta come:
ln[ pr|a (R | A)
ln[ pa ( A)
l ( A)
0
A A aˆ (R )
A
A A aˆ (R )
A aˆ (R )
16
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 1
• Consideriamo:
ri a ni
i 1,2,..... , N
• Assumiamo che la variabile a sia Gaussiana, N(0,a), e
che i campioni ni siano variabili Gaussiane indipendenti
N(0,n). Quindi:
( R A )2
1
pr|a ( R | A )
exp i
2 n2
i 1 2 n
N
A2
1
pa ( A )
exp
2 a 2 a2
• Per trovare âms(R) abbiamo bisogno di conoscere
pa|r(A|R).
• Una possibilità consiste nel trovare pr(R) e sostituirla
nella regola di Bayes sulla probabilità condizionale per
ricavare pr|a(R|A), ma questa procedura è piuttosto
noiosa.
17
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 1
• E’ più facile osservare che pa|r(A|R) è la densità di
probabilità di a per ogni R dato, quindi:
pa|r ( A | R )dA 1
• Pr(R) è solo una costante di normalizzazione.
N 1
1 N
2
(
R
A
)
i
2
2 n 2 a 1 i 1
A
i
1
pa|r ( A | R )
exp
2
2
2
pr ( R )
n
a
• Completando il quadrato all’esponente e considerando
come una costante i termini dipendenti solo da Ri2
si ottiene:
2
2
N
1
1
a
pa|r ( A | R ) k ( R ) exp
A
Ri
2 2p a2 n2 / N N i 1
dove:
1
N
2
p
2 2
a
n
1
a2 n2
N a2 n2
è la varianza a posteriori.
18
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 1
• Osserviamo che pa|r(A|R) è una densità Gaussiana.
• La stima âms(R) è la seguente media condizionale:
1 N
Ri
âms ( R )
2
2
a n / N N i 1
a2
• Siccome la varianza a posteriori non è funzione di R,
il rischio quadratico medio è uguale alla varianza a
posteriori (v. espressione del rischio).
OSSERVAZIONI:
1. I valori Ri entrano nella densità a posteriori solo
attraverso la loro somma, cioè:
N
l( R ) Ri
i 1
è la statistica sufficiente. Il concetto di statistica
sufficiente è lo stesso introdotto nella teoria della
decisione.
19
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 1
2. La regola di stima usa l’informazione disponibile in
maniera logica ed intuitiva:
- Se a2 << n2/N , la conoscenza a priori è migliore dei
dati osservati è la stima è molto vicina alla media a
priori (in questo caso la media a priori è zero).
- Se a2 >> n2/N , la conoscenza a priori è di poca utilità
e la stima usa principalmente i dati ricevuti. Nel caso
limite âms è la media aritmetica degli Ri:
1 N
lim âms ( R ) Ri
N i 1
n2
N a2
0
20
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 1
La stima MAP per questo caso si ricava facilmente:
- Osservando l’espressione della pa|r(A|R), vediamo che
siccome la densità è Gaussiana, il massimo valore di
pa|r(A|R) si ha in corrispondenza della media
condizionale, cioè:
âmap ( R ) âms ( R )
- Siccome il valore mediano condizionale di una densità
Gaussiana corrisponde alla media condizionale,
abbiamo anche che:
âabs ( R ) âms ( R )
21
PARAMETRI CASUALI: STIMA DI BAYES
• Nell’esempio precedente si può quindi osservare che
tutte e tre le funzioni di costo considerate in
precedenza portano alla stessa stima.
• Questa invarianza rispetto alla scelta della funzione
di costo è una caratteristica importante perché
spesso, nella scelta della funzione di costo C(a), sono
considerati giudizi soggettivi.
• Alcune condizioni per cui vale questa proprietà di
invarianza sono contenute nelle due proprietà
seguenti:
22
PARAMETRI CASUALI: STIMA DI BAYES
PROPRIETA’ 1
• Assumiamo che la funzione di costo C(a) sia una
funzione simmetrica con convessità verso l’alto e che
la densità di probabilità a posteriori pa|r(A|R) sia
simmetrica rispetto alla sua media condizionale:
C( a ) C( a )
simmetria
C( bx1 ( 1 b )x2 ) bC ( x1 ) ( 1 b )C( x2 )
convessità
per ogni b nell’intervallo (0,1) e per ogni x1 e x2.
Funzione simmetrica
convessa
Funzione simmetrica
strettamente convessa
23
PARAMETRI CASUALI: STIMA DI BAYES
• Definendo:
z a âms a E [ a | R ]
la simmetria della densità a posteriori implica che:
pz|r ( Z | R ) pz|r ( Z | R )
• La stima â che minimizza qualsiasi funzione di questa
classe è identica a âms (che è la media condizionale).
DIM:
• Possiamo minimizzare il rischio condizionale.
Usando la definizione di z e la proprietà di simmetria
definiamo:
R B ( â | R ) C( â ams Z ) p z|r ( Z | R )dZ
C( â âms Z ) p z|r ( Z | R )dZ
C( âms â Z ) p z|r ( Z | R )dZ
C( âms â Z ) p z|r ( Z | R )dZ
24
PARAMETRI CASUALI: STIMA DI BAYES
• Usando la condizione di convessità e considerando
il secondo integrale dell’espressione precedente,
possiamo scrivere:
1
R B ( â | R ) E C [ Z ( âms â )] C [ Z ( âms â )]| R
2
1
1
E C [ ( Z ( âms â )) ( Z ( âms â ))] | R
2
2
E[C(Z) |R) ]
• Nell’espressione, l’uguaglianza può essere raggiunta
se âms = â. Questo completa la dimostrazione.
• Se la funzione di costo è strettamente convessa,
allora la stima â è unica ed uguale a âms.
• La funzione di costo uniforme non è convessa, quindi
si introduce la seconda proprietà.
25
PARAMETRI CASUALI: STIMA DI BAYES
PROPRIETA’ 2
• Assumiamo che la funzione di costo sia simmetrica,
non decrescente e che la densità a posteriori
pa|r(A|R) sia simmetrica (rispetto alla media
condizionale), unimodale e soddisfi la seguente
condizione:
lim C( x ) pa|r ( x | R ) 0
x
• La stima â che minimizza ogni funzione di costo
in questa classe è identica a âms.
• La dimostrazione di questa proprietà è simile alla
precedente.
26
PARAMETRI CASUALI: STIMA DI BAYES
• D’ora in poi prenderemo in considerazione solo
le stime a minimo valore quadratico medio e a
massima probabilità a posteriori.
• Le proprietà 1 e 2 assicurano che ogni volta che le
densità a posteriori soddisfano le assunzioni date
precedentemente, le stime che otteniamo saranno
ottime per una larga classe di funzioni di costo.
27
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 2
• Il parametro a appare nel segnale in modo non
lineare. Denotiamo questa dipendenza con s(A).
• Ogni osservazione ri consiste di s(A) più una
variabile aleatoria ni Gaussiana N(0, n).
• Le variabili ni sono statisticamente indipendenti tra
loro e rispetto al parametro a:
ri s( A ) ni
• Quindi:
N
[ Ri s( A )] 2
2
A
1
pa|r ( x | R ) k ( R ) exp i 1
2
2
2
n
a
28
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 2
• L’espressione precedente non può essere semplificata
ulteriormente senza specificare esplicitamente s(A).
• L’equazione MAP risulta essere:
a2 N
s( A )
[
R
s
(
A
)]
A
0
i
2
A
n i 1
Aâmap ( R )
• Per risolvere l’equazione in maniera esplicita, occorre
specificare s(A).
• Quando s(A) è una funzione non lineare di A, non è
possibile trovare una soluzione analitica.
29
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 3
• Un altro tipo di problema che frequentemente si
presenta è la stima di un parametro in una densità
di probabilità.
•Il numero di eventi in un esperimento obbedisce ad
una legge di Poisson con valore medio a:
An
Pr ( n eventi | a A )
exp( A )
n!
n 0,1,...
• Vogliamo osservare il numero di eventi e stimare il
parametro a della legge di Poisson.
• Assumiamo che a sia una variabile casuale con una
densità esponenziale:
exp( A )
pa ( A )
0
A0
altrimenti
• La probabilità a posteriori di a è:
Pa|n ( A | N )
Pr( n N | a A ) pa ( A )
Pr( n N )
30
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 3
• Quindi la densità a posteriori risulta essere:
pa |n ( A | N ) k ( N )[ A N exp( A( 1 ))],
A0
dove
( 1 )N 1
k( N )
N!
ha lo scopo di normalizzare la densità in modo che
il suo integrale sia unitario.
• La stima a minimo valore quadratico medio (MS)
è la media condizionale:
( 1 ) N 1 N 1
âms
exp[ A( 1 )] dA
A
N!
( 1 ) N 1
1
( N 1)
( N 1 )
N
2
1
(1 )
31
PARAMETRI CASUALI: STIMA DI BAYES
Esempio 3
• Per trovare âmap facciamo il logaritmo della densità
a posteriori:
ln pa |n ( A | N ) N ln A A( 1 ) ln k( N )
• Differenziando rispetto ad A, ponendo la derivata
uguale a zero e risolvendo, otteniamo:
N
âmap ( N )
1
• Osserviamo che âmap è diverso da âms(la pa|n(A|N)
non è simmetrica rispetto alla media).
32
PARAMETRI CASUALI: STIMA DI BAYES
SINTESI
• La stima a minimo errore quadratico medio è sempre
la media della densità a posteriori (media
condizionale);
• La stima massima a posteriori (MAP) è il valore di A
in corrispondenza del quale la densità a posteriori
ha il suo massimo;
• Per una vasta classe di funzioni di costo la stima
ottima è la media condizionale ogni volta che la
densità a posteriori è una funzione unimodale
simmetrica rispetto alla media condizionale.
33
STIMA DI PARAMETRI NON ALEATORI
• In molti casi non è realistico trattare i parametri
sconosciuti come variabili aleatorie;
• Vogliamo trovare criteri di stima adatti per la stima
di parametri non aleatori;
cerchiamo di adattare la procedura di Bayes a
questo caso, cercando di eliminare la media su
pa(A).
• Come esempio consideriamo la stima MMSE:
R ( A ) [ â( R ) A ] 2 pr|a ( R | A )dR
dove l’operazione di media è solo su R, poiché è
l’unica variabile aleatoria nel modello.
• Minimizzando la funzione di rischio, si ottiene:
âms ( R ) A
• Il risultato ottenuto è corretto, ma di nessun valore,
poiché A è la quantità sconosciuta che stiamo
cercando di stimare
questo approccio non è di alcun aiuto.
34
STIMA DI PARAMETRI NON ALEATORI
• Un metodo più utile per la stima di parametri non
aleatori consiste nell’esaminare altre possibili misure
di qualità delle procedure di stima e quindi vedere se
possiamo trovare stime che siano buone in termini di
queste misure.
• La prima misura di qualità da considerare è il valore
medio della stima:
E [ â( R )] â( R ) pr|a ( R | A )dR
• I possibili valori della media possono essere
raggruppati in tre classi:
1. Se E[â(R)] =A per tutti i valori di A, diciamo che la
stima è non polarizzata. Questo significa che il valore
medio della stima è uguale alla quantità che vogliamo
stimare.
2.Se E[â(R)] =A+B, dove B non è funzione di A, diciamo
che la stima ha polarizzazione nota. Possiamo ottenere
una stima non polarizzata sottraendo B da â(R).
3.Se E[â(R)] =A+B(A), diciamo che la stima ha una
polarizzazione non nota.
35
STIMA DI PARAMETRI NON ALEATORI
• Chiaramente anche una stima non polarizzata potrebbe
dare un cattivo risultato su una particolare
realizzazione.
• Un semplice esempio è dato dalla seguente figura:
• La densità di probabilità della stima è centrata in A,
ma la varianza di questa densità è così larga che è
molto probabile commettere errori grandi.
• Una seconda misura di qualità è la varianza dell’errore
di stima:
Var [ â( R ) A ] E [ â( R ) A ] 2 B 2 ( A )
• Questa fornisce una misura di quanto si può espandere
l’errore.
• In generale noi cercheremo di trovare stime non
polarizzate con piccola varianza.
36
STIMA A MASSIMA VEROSIMIGLIANZA
• Consideriamo il semplice problema riportato
nell’esempio 1:
r A n
1
pr|a ( R | A ) ( 2 n )1 exp ( R A )2
2
• Scegliamo come stima il valore di A che più
verosimilmente genera il valore ricevuto R.
• Nel semplice caso additivo vediamo che questo
equivale a scegliere il valore più probabile del rumore
(N=0) e sottraendola da R.
• Denotiamo il valore ottenuto usando questa procedura
come stima a massima verosimiglianza:
âml ( R ) R
• Nel caso generale denotiamo la funzione pr|a(R|A), vista
come funzione di A, come funzione di verosimiglianza
(likelihood).
• Frequentemente noi lavoriamo con il logaritmo,
ln[pa|r(A|R)], e denotiamo questa funzione come
loglikelihood.
37
STIMA A MASSIMA VEROSIMIGLIANZA
• La stima a massima verosimiglianza (ML) âml(R) è
quel valore di A per cui la funzione di verosimiglianza
è massima.
• Se il massimo è interno al rango di A e la ln[pr|a(R|A)],
ha una derivata prima continua, allora una condizione
necessaria su âml(R) è ottenuta differenziando
ln[pr|a(R|A)] rispetto ad A e ponendo il risultato uguale
a zero:
ln pr|a ( R | A )
A
0
A âml ( R )
• Questa è chiamata equazione di verosimiglianza.
•Se confrontiamo l’equazione MAP con l’equazione di
verosimiglianza vediamo che la stima ML corrisponde
matematicamente al caso limite di una stima MAP in
cui la conoscenza a priori tende a zero.
38
STIMA A MASSIMA VEROSIMIGLIANZA
• Per vedere se la stima ML è una buona stima,
dovremmo calcolarne la polarizzazione e la varianza.
• Spesso questi calcoli sono difficili da svolgere
anziché affrontare il problema direttamente,
procederemo nel seguente modo:
1. ricaveremo, per prima cosa, un limite inferiore
sulla varianza di ogni stima non polarizzata;
2.in secondo luogo, confronteremo la varianza di
âml(R) con questo limite inferiore
39
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
• Consideriamo la varianza di ogni stima â(R) di una
variabile A. Può essere dimostrato il seguente:
TEOREMA:
(a) Se â(R) è una qualunque stima non polarizzata di A,
allora:
ln p ( R | A ) 2
r|a
Var [ â( R ) A ] E
A
o equivalentemente:
1
1
2
ln pr|a (R | A)
(b) Var[aˆ (R) A] E
2
A
dove si assume che siano soddisfatte le seguenti
condizioni:
(c)
ln pr|a ( R | A )
A
e
2 ln pr|a ( R | A )
2 A
esistono e sono integrabili in senso assoluto.
• Quando la stima è tale per cui vale l’uguaglianza,
allora viene chiamata stima efficiente.
40
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
DIM:
• La dimostrazione è una semplice applicazione della
disuguaglianza di Schwartz.
• Siccome â(R) è una stima non polarizzata, allora:
E [ â( R ) A ] pr|a ( R | A )[ â( R ) A ] dR 0
• Differenziando rispetto ad A:
d
pr|a (R | A)[ aˆ (R ) A]dR
dA
pr|a (R | A)[ aˆ (R ) A]dR 0
A
dove la condizione (c) ci permette di portare la
differenziazione dentro l’integrale.
pr|a ( R | A )
pr|a ( R | A )dR
A
[ â( R ) A ] dR 0
41
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
• Il primo integrale è uguale a 1. Osserviamo che:
pr|a ( R | A )
A
ln pr|a ( R | A )
A
pr|a ( R | A )
• Sostituendo questa espressione nella precedente
abbiamo:
ln pr|a ( R | A )
A
ln pr|a ( R | A )
A
pr|a ( R | A )[ â( R ) A ] dR 1
pr|a ( R | A ) pr|a ( R | A )[ â( R ) A ] dR 1
• Usando la disuguaglianza di Schwartz:
ln p ( R | A ) 2
r|a
p
(
R
|
A
)
d
R
r|a
A
2
[ â( R ) A ] pr|a ( R | A )dR 1
42
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
• Nella disuguaglianza precedente, l’uguaglianza si
ottiene se:
ln pr|a ( R | A )
A
[ â( R ) A ] k ( A )
(3)
per tutti i valori di R e A.
• I due termini a sinistra nella disuguaglianza
precedente sono le medie dell’espressione (a):
-1
ln p ( R | A ) 2
r|a
E [ â( R ) A ] 2 E
A
(4)
• Per dimostrare la (b) osserviamo che:
pr|a ( R | A )dR 1
• Differenziando rispetto ad A, abbiamo:
pr|a ( R | A )
A
ln pr|a ( R | A )
dR
A
pr|a ( R | A )dR 0
43
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
• Differenziando di nuovo rispetto ad A, abbiamo:
2 ln pr|a ( R | A )
A
2
pr|a ( R | A )dR
ln pr|a ( R | A ) 2
A
pr|a ( R | A )dR 0
2
2 ln p ( R | A )
ln
p
(
R
|
A
)
r|a
r|a
E
E
2
A
A
• che insieme alla equazione (4) dà la condizione (b).
44
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
OSSERVAZIONI
1. Il risultato ottenuto mostra che ogni stima non
polarizzata deve avere una varianza più grande di un
certo valore;
2.Se l’uguaglianza (3) è soddisfatta, la stima âml(R)
sarà proprio uguale al limite; questo può essere
dimostrato combinando l’equazione (4) con l’equazione
di verosimiglianza:
0
ln pr|a ( R | A )
A
Aâml ( R )
( â( R ) A )k ( A ) Aâ ( R )
ml
• Il termine a destra è uguale a zero se:
â( R ) âml ( R )
oppure
k( âml ( R )) 0
• Siccome ci interessa una soluzione che dipende dai
dati, allora consideriamo la prima delle due condizioni
se una stima efficiente esiste, allora è âml(R) e può
essere ottenuta come unica soluzione alla equazione
di verosimiglianza.
45
DISUGUAGLIANZA DI CRAMER-RAO
Parametri non aleatori
3.Se una stima efficiente non esiste, non sappiamo
quanto buona sia âml(R); inoltre non sappiamo quanto la
varianza si avvicini al limite inferiore.
4.Allo scopo di utilizzare il limite, dobbiamo verificare
che la stima che stiamo considerando sia non
polarizzata.
Vediamo ora alcuni esempi dell’applicazione della
disuguaglianza di Cramer-Rao, considerando la stima
di parametri non aleatori.
46
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 2
• Riprendiamo l’esempio 1:
ri A ni
i 1,2, ..... , N
• Abbiamo che:
ln pr|a (R | A) N 1 N
Ri A
2
A
n N i 1
(5)
ponendo la derivata uguale a zero, otteniamo:
1 N
âml ( R ) Ri
N i 1
• Per ricavare la polarizzazione, eseguiamo l’operazione
di media:
1 N
1 N
E [ âml ( R )] E( Ri ) A A
N i 1
N i 1
la stima âml(R) è non polarizzata.
47
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 2
• Siccome l’espressione (5) ha la forma richiesta dalla
(3), possiamo affermare che âml(R) è una stima
efficiente.
• Per valutare la varianza differenziamo l’equazione (5):
2 ln pr|a (R | A)
A2
N
n2
• Usando la condizione (b) della disuguaglianza di
Cramer-Rao e il risultato di efficienza appena
ottenuto, abbiamo:
Var [ âml ( R ) A ]
n2
N
48
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 3
• Riprendiamo l’esempio 3. In questo caso abbiamo che:
ln Pr( n N | A )
( N ln A A ln N ! )
A
A
N
1
1 ( N A )
(6)
A
A
• La stima ML è:
âml ( R ) N
• La stima è chiaramente non polarizzata ed efficiente.
49
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 4
• Per valutare la varianza, differenziamo l’equazione (6):
2 ln Pr( n N | A )
A2
N
A2
• Quindi:
A2
A2
Var [ âml ( N ) A ]
A
E( N ) A
• In entrambi gli esempi 1 e 3, osserviamo che la stima
potrebbe essere ricavata con la stima MAP (ponendo
a nell’equazione MAP, ricordando che âms= âmap e
ponendo 0 nel risultato ottenuto precedentemente
nell’esempio 4.
50
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 2
• Riprendiamo ora l’esempio 2. In questo caso abbiamo:
(togliendo il contributo della pa(A)):
ln pr|a ( R | A ) 1 N
s( A )
(7)
[
R
s
(
A
)]
i
2
A
A
n i 1
• In generale, il termine a destra non può essere scritto
nella forma richiesta dall’equazione (3), e quindi una
stima non polarizzata ed efficiente non esiste.
• L’equazione di verosimiglianza è:
s( A ) 1 1 N
0
Ri s( A )
2
Aâml ( R )
A n N i 1
• Se l’intervallo di valori assunto da s(A) contiene
( 1 / N )iN1 Ri allora una soluzione esiste:
1 N
s [ âml ( R )] Ri
N i 1
(8)
51
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 3
• Se la (8) è soddisfatta, allora:
1 N
1
âml ( R ) s Ri
N i 1
• Questa equazione assume che esista la funzione
inversa di s( . ).
• Se questa non esiste allora anche in
assenza di rumore non siamo in grado di determinare
A senza ambiguità.
• Quando progettiamo un sistema, dobbiamo sempre
scegliere una funzione s( . ) che ci permetta di trovare
A senza ambiguità in assenza di rumore.
• Se l’intervallo di valori assunto da s(A) non contiene
( 1 / N )iN1 Riallora il massimo si trova in uno dei punti
estremi dell’intervallo.
52
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 3
• Vediamo che la stima a massima verosimiglianza
commuta su operazioni non lineari (questo non è vero
per le stime MS o MAP).
• Se la stima non è polarizzata, valutiamo il limite sulla
varianza differenziando la (7):
2 ln pr|a ( R | A )
A2
1 N
2 s( A ) N s( A ) 2
[ Ri s( A )]
2
2
n i 1
A
n2 A
• Osservando che:
E [ ri s( A )] E( ni ) 0
otteniamo il seguente limite per ogni stima non
polarizzata:
Var [ â( R ) A ]
n2
N [ s( A ) / A ] 2
53
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 3
• Vediamo che il limite è esattamente lo stesso ricavato
2
per l’esempio 2, a meno del fattore [ s( A ) / A ]
• La ragione intuitiva per cui abbiamo questo fattore
può essere ottenuta analizzando la tipica funzione
mostrata nella seguente figura:
• Definiamo:
Y s( A )
ri Y ni
54
DISUGUAGLIANZA DI CRAMER-RAO
Esempio 3
• La varianza nella stima di Y è proprio 2/N.
• Se y, l’errore nella stima di Y, è abbastanza piccolo,
così che la pendenza è costante, allora:
Y
A
s( A )
A Aâ( R )
e
Var( a )
Var( y )
[ s( A ) / A ]
2
n2
N [ s( A ) / A ] 2
• Osserviamo che se y è elevato, non ci sarà più una
semplice relazione lineare tra y e a; questo ci dice
quando ci possiamo aspettare che il limite di
Cramer-Rao fornisca una risposta accurata nel caso in
cui il parametro da stimare sia presente nel problema
con una legge non lineare.
• Precisamente, quando l’errore di stima è piccolo
relativamente a A 2 s( A ) / A
, 2dovremmo aspettarci
che la vera varianza sia vicina al limite dato dalla
disuguaglianza di Cramer-Rao.
55
STIMA ML:
proprietà
• Possono essere dimostrate le seguenti proprietà:
1. La soluzione dell’equazione di verosimiglianza converge
in probabilità al valore corretto di A per N che tende
all’infinito.(N numero di osservazioni indipendenti)
Ogni stima con questa proprietà è chiamata
consistente, quindi la stima ML è consistente.
2.La stima ML è asintoticamente efficiente, cioè:
lim
Var [ âml ( R ) A ]
N
2
E ln pr|a ( R | A )
2
A
1
1
3.La stima ML è asintoticamente Gaussiana, N(A, a).
• Queste proprietà riguardano il comportamento della
stima ML con un elevato numero di osservazioni; esse
forniscono una motivazione per l’utilizzo della stima
ML anche quando una stima efficiente non esiste.
56
Limite inferiore sul minimo MSE
nella stima di parametri casuali
• Dimostriamo il seguente teorema:
Siano a una variabile aleatoria e r il vettore di
osservazioni. Il valore MSE di ogni stima â(R) soddisfa
la disuguaglianza:
ln p (R , A) 2
r,a
E [aˆ ( R ) a ]2 E
A
r , a
2 ln pr , a (R , A)
E
2
A
r,a
1
1
(9)
• Osserviamo che la densità di probabilità è una densità
congiunta e che la media è eseguita sia su a che su r.
• Si assume che esistano le funzioni indicate e valgano:
pr ,a ( R , A )
1.
è assolutamente integrabile rispetto
A
ad R e A.
2 p ( R, A )
r ,a
2.
è assolutamente integrabile rispetto
A2
ad R e A.
57
Limite inferiore sul minimo MSE
nella stima di parametri casuali
3. La media condizionale dell’errore, dato A, è:
B( A ) [ â( R ) A ] pr|a ( R | A )dR
(10)
• Assumiamo che:
lim B( A ) pa ( A ) 0
A
lim B( A ) pa ( A ) 0
A
DIM.
• Moltiplichiamo entrambi i membri della (10) per pa(A)
e quindi differenziamo rispetto ad A:
d
[ pa ( A )B( A )] pr ,a ( R , A )dR
dA
p ( R , A )
r ,a
A
[ â( R ) A ] dR
58
Limite inferiore sul minimo MSE
nella stima di parametri casuali
• Integriamo rispetto ad A:
[ pa ( A )B( A )]
p ( R , A )
r ,a
1
A
[ â( R ) A ] dAdR
• L’assunzione nella condizione (3) rende la parte
a sinistra uguale a zero.
• Seguendo lo stesso procedimento usato per la
dimostrazione della disuguaglianza di Cramer-Rao
si ottiene alla fine:
ln p ( R , A ) 2
r ,a
E [ â( R ) a ] 2 E
A
o, equivalentemente:
1
2 ln p ( R , A )
2 ln p ( A )
r ,a
2
a
E [ â( R ) a ] E
E
2
2
A
A
• L’uguaglianza vale solo se:
ln pr ,a ( R , A )
k [ â( R ) A ]
A
per ogni R e A.
59
1
Limite inferiore sul minimo MSE
nella stima di parametri casuali
• Differenziando nuovamente, si ottiene una condizione
equivalente:
2 ln pr ,a ( R , A )
(11)
k
A2
• Osservando che questa equazione può essere riscritta
in termini della densità a posteriori, abbiamo che:
2 ln pa|r ( A | R )
A
2
k
• Integrando quest’ultima equazione due volte e
applicando l’esponenziale al risultato, abbiamo:
pa|r ( A | R) exp( kA2 C1 A C2 )
(12)
per ogni R e A.
• L’equazione (11) afferma semplicemente che la densità
di probabilità a posteriori di a deve essere Gaussiana
per tutti gli R per fare in modo che esista una stima
efficiente.
60
Limite inferiore sul minimo MSE
nella stima di parametri casuali
• Possiamo osservare che se la (11) è soddisfatta allora
la stima MAP sarà efficiente.
• Siccome la stima a minimo MSE non può avere un errore
maggiore, questo ci dice che:
âms ( R ) âmap ( R )
ogni volta che esiste una stima efficiente.
• Quando una stima efficiente non esiste, generalmente
è computazionalmente più semplice risolvere la
equazione MAP piuttosto che trovare la media
condizionale.
• Quando non esiste una stima efficiente, non sappiamo,
usando sia âms(R), sia âmap(R), quanto il valore MSE si
avvicina al limite inferiore.
Si hanno propieta’ asintotiche “buone”.
(v. ML per parametri non random).
61
STIMA DI PARAMETRI MULTIPLI
• In molti problemi di interesse noi vogliamo stimare
più di un parametro.
• Il modello è mostrato nella seguente figura:
62
STIMA DI PARAMETRI MULTIPLI
• Se ci sono K parametri da stimare, allora li descriviamo
tramite un vettore di parametri a nello spazio
K-dimensionale.
• Gli altri elementi del modello rimangono invariati.
• Può essere considerato sia il caso in cui a sia un vettore
di parametri aleatori, sia il caso in cui a sia un vettore
di parametri reali (non aleatori).
• Anche nel caso vettoriale ci sono tre cose di interesse,
che sono:
1. Procedure di stima;
2. Misure di errore;
3. Limiti sulle prestazioni.
63
STIMA DI PARAMETRI MULTIPLI
Procedure di stima
• Nel caso di stima di Bayes minimizziamo il rischio per
un’arbitraria funzione di costo scalare C(a, â), ma per
i nostri scopi consideriamo solo funzioni di costo
dipendenti dall’errore:
a ( R ) ˆa( R ) a
• Per il criterio MSE la funzione di costo è:
C( a ( R )) aT ( R )a ( R )
• Si può dimostrare che la stima MS si riduce:
aˆ ms ( R ) Ai pa / r ( A | R )dA
i
Inoltre la stima MS commuta su operazioni
lineari,cioe’ se:
b Da
dove D è una matrice L x K, e vogliamo minimizzare
L 2
T
E [ b ( R )b ( R )] E b ( R )
i 1 i
il risultato sarà:
ˆ ms ( R ) Da
ˆ ms ( R )
b
64
STIMA DI PARAMETRI MULTIPLI
Procedure di stima
• Nel caso di stima MAP, abbiamo un insieme di K
equazioni simultanee:
ln pa|r ( A | R )
Ai
0
i 1,2 , ..... , K
ˆ map ( R )
A a
• Per la stima ML dobbiamo trovare il valore di A che
massimizza pr|a(R|A).
• Se il massimo è interno ed esiste la derivata parziale
di pr|a(R|A) rispetto ad Ai, allora una condizione
necessaria è ottenuta dalle seguenti equazioni di
verosimiglianza:
A [ln pr|a ( R | A )]
ˆ ml ( R )
A a
0
In entrambi i casi si deve verificare che si abbia un
massimo assoluto.
65
STIMA DI PARAMETRI MULTIPLI
Misure di errore
• Per parametri non casuali la prima misura di errore è la
polarizzazione:
B( A ) E [ a ( R )] E [ ˆa( R )] A
• Se ogni componente del vettore è nulla per ogni A,
allora la stima è polarizzata.
• La seconda misura di interesse analoga alla varianza
dell’errore è la matrice di covarianza:
E [( a a )( aT aT )]
Dove:
a E( a ) B( A )
Consideriamo il caso di limite sull’errore relativo ad una
singola componente Ai. Si possono definire altri limiti, ad
esempio nel caso Gaussiano utilizzando l’intera matrice
di covarianza.(v. Van Trees).
66
STIMA DI PARAMETRI MULTIPLI
Limiti sulle prestazioni
• Consideriamo una stima non polarizzata Ai. Allora:
2 Var[aˆi (R) Ai ] J*ii
i
dove J*ii sono gli elementi ii-esimi della matrice KxK J-1.
Gli elementi di J sono:
ln pr|a (R | A) ln pr|a (R | A)
J ij E
Ai
A j
2 ln pr|a (R | A)
-E
Ai A j
La matrice J e’ detta “matrice dell’informazione di Fisher”
(Fisher’s information matrix).
L’uguaglianza vale se e solo se:
K
ln p r|a ( R | A)
j 1
A j
aˆi ( R) Ai K ij ( A)
Ai , R
67
IPOTESI COMPOSITE
• Fino ad ora abbiamo considerato l’ipotesi semplice.
• Per capire cosa si intende per ipotesi composite
consideriamo il seguente
ESEMPIO 1
•Sotto l’ipotesi 0 la variabile osservata r è Gaussiana a
media nulla e varianza 2.
• Sotto l’ipotesi 1 la variabile osservata r è Gaussiana a
media m e varianza 2.
• Il valore di m può essere un qualsiasi valore nello
intervallo [M0,M1]. Quindi:
R2
1
H 0 : pr|H 0 ( R | H 0 )
exp
2 2
2
( R M )2
1
H1 : pr|H1 ( R | H1 )
exp
2
2 2
M 0 M M1
68
IPOTESI COMPOSITE
• Chiamiamo H1 ipotesi composita perché il valore del
parametro M, che caratterizza l’ipotesi, può assumere
un insieme di valori.
• Un modello per questo problema di decisione è
mostrato nella figura seguente:
69
IPOTESI COMPOSITE
(Esempio-continuazione)
• L’uscita della sorgente è un valore M che vediamo come
un punto nello spazio dei parametri .
• Quindi definiamo le ipotesi come un sottospazio di .
• In questo caso H0 corrisponde al punto M=0 e H1
corrisponde all’intervallo [M0, M1].
• Assumiamo che la densità di probabilità che governa
il processo di mapping dallo spazio dei parametri allo
spazio dell’osservazione pr|m(R|M) sia nota per tutti
i valori di M in .
• La componente finale è una regola di decisione che
divide lo spazio delle osservazioni in due parti che
corrispondono alle due possibili decisioni.
• È importante osservare che siamo interessati solo nel
prendere una decisione è che l’attuale valore di M non è
di nostro interesse.
• Per questa ragione il parametro M è spesso chiamato
‘parametro non voluto’.
Fine esempio
70
IPOTESI COMPOSITE
• Nel test di ipotesi composita l’uscita della sorgente è
quindi un punto nello spazio dei parametri denotato
dal vettore .
• Le ipotesi sono sottospazi di .
• La densità di probabilità che governa il mapping dallo
spazio dei parametri allo spazio delle osservazioni è
denotata da pr|(R| ) e si assume essere nota per tutti
i valori di in .
• La componente finale del modello è la regola di
decisione.
71
IPOTESI COMPOSITE
• Per completare la formulazione del problema, dobbiamo
caratterizzare il parametro .
• Come nel caso della stima dei parametri, può essere
una variabile aleatoria o non aleatoria.
• Consideriamo il caso in cui sia una variabile
(vettore) aleatoria con una densità di probabilità nota;
denotiamo la densità di sotto le due ipotesi con
p|H0(|H0) e p|H1(|H1)
il rapporto di verosimiglianza è:
( R )
pr|H1 ( R | H1 )
pr|H 0 ( R | H 0 )
pr| ( R | ) p |H1 ( | H1 )d
pr| ( R | ) p |H 0 ( | H 0 )d
• La densità di probabilità nota su ci permette di
ridurre questo problema ad un semplice problema di
hipothesis-testing integrando su .
72
IPOTESI COMPOSITE
Esempio 1
Riprendiamo l’esempio 1.
• Assumiamo che la densità di probabilità che governa m
su H1 sia:
M2
pm|H1 ( M | H1 )
exp
2 2
2 m
m
1
M
Quindi il rapporto di verosimiglianza diventa:
M2
( R M )2
1
1
dM
exp
exp
2 2
2 2 2 m
2
m
( R )
2
R
1
exp
2
2
2
73
IPOTESI COMPOSITE
Esempio 1
• Integrando ed applicando il logaritmo naturale ad
entrambi i membri dell’uguaglianza, otteniamo:
2
2
2
2
2 ( m ) ln 1 ln1 m
R2
2
2
2
m
H0
H1
• Questo risultato è identico a quello ottenuto nel
secondo esempio visto nella teoria della decisione;
ciò è dovuto alla particolare scelta della densità di
probabilità che governa m.
( ha lo stesso significato visto in quel caso: soglia
determinata dal criterio adottato).
74
IPOTESI COMPOSITE
• Come ci aspettavamo, il test usa solo l’ampiezza di R,
perché m ha una densità di probabilità simmetrica.
• Per il caso generale rappresentato dall’equazione di
verosimiglianza, il calcolo può risultare più complicato,
ma la procedura da seguire rimane la stessa.
• Quando è una variabile aleatoria con una densità
non nota, la migliore procedura di test non è
chiaramente specificata.
• Un approccio possibile consiste nel test minimax sulla
densità sconosciuta.
• Un approccio alternativo consiste nel considerare
diverse densità basandosi sulla parziale conoscenza a
priori di che si ha a disposizione.
• In molti casi la struttura del test non e’ molto sensibile
all’andamento della densità di probabilità.
75
IPOTESI COMPOSITE
• Il secondo caso di interesse è il caso in cui è una
variabile non aleatoria.
• Qui, come nel problema della stima di parametri non
aleatori, cercheremo una procedura ed analizzeremo
i risultati.
• Una prima osservazione è che, siccome non ha densità
di probabilità su cui eseguire una media, il test di
Bayes non è significativo.
consideriamo il test di Neyman-Pearson
• Cominciamo la discussione esaminando ciò che
chiamiamo ‘limite di misurazione perfetta’ sulle
prestazioni del test.
• Per chiarire l’idea, riprendiamo l’esempio 1.
76
IPOTESI COMPOSITE
Esempio 2
• In questo caso = M e si ha che:
( R M )2
1
H1 : pr|m ( R | M )
exp
2
2 2
M 0 M M1
R2
1
H 0 : pr|m ( R | M )
exp
2 2
2
dove M è un parametro non aleatorio sconosciuto.
• È chiaro che ogni test che progettiamo, non potrà
mai essere migliore di un ipotetico test in cui il
ricevitore prima misura perfettamente M (o,
alternativamente, conosce M perché gli viene detto)
e quindi progetta il test ad ottimo rapporto di
verosimiglianza.
• Quindi noi possiamo limitare le curve ROC per ogni
test con la curva ROC di questa misurazione fittizia.
77
IPOTESI COMPOSITE
Esempio 2
• In questo esempio consideriamo le seguenti curve dette
“Power Function”:
78
IPOTESI COMPOSITE
Esempio 2
• Questa curva è chiamata funzione di potenza. Essa
è semplicemente PD per tutti i valori di M (più
generalmente ) per diversi valori di PF.
• Siccome H0=H1 per M = 0, PD= PF.
• Le curve mostrate nella figura precedente
rappresentano un limite sulla bontà di un test.
• Ora volgiamo vedere quanto le prestazioni ottenute
dal nostro test si avvicinano a questo limite.
79
IPOTESI COMPOSITE
Esempio 2
• Le migliori prestazioni che possiamo ottenere
sarebbero raggiunte se la curva di test uguagliasse
il limite per tutti gli M appartenenti .
• Chiamiamo questo test UMP (il più uniformemente
potente). In altre parole, per una data PF un test UMP
ha una PD maggiore o uguale ad ogni altro test per
ogni M appartenente .
• Le condizioni affinchè esista un test UMP possono
essere viste nella seguente figura:
80
IPOTESI COMPOSITE
Esempio 2
• Costruiamo prima il limite di misurazione perfetta; poi
consideriamo altri possibili test e le relative
prestazioni;
• Il test A è un normale test a rapporto di
verosimiglianza (LRT) progettato secondo l’assunzione
che M = 1.
• La prima osservazione è che la potenza di questo test
è uguale al limite quando M = 1, che segue dal modo in
cui abbiamo costruito il limite.
• Per altri valori di M la potenza del test A può essere
uguale o meno al limite.
• Similarmente il test B è un LRT progettato sotto
l’assunzione M = 2 e il test C è un LRT progettato sotto
l’assunzione M = -1.
• In ogni caso la loro potenza uguaglia il limite nei punti
per i quali il test è stato progettato.
81
IPOTESI COMPOSITE
Esempio 2
• Nella figura le curve relative ai test LRT non sono
quantitativamente corrette, ma servono per fare
notare che la potenza uguaglia il limite per il valore
di M per cui e’ stato progettato il test. Cio’ non toglie
che possa eguagliarlo anche in altri punti.
• Le condizioni per un test UMP ora sono chiare:
dobbiamo essere in grado di progettare un test LRT
completo (compreso il valore di soglia) per ogni M
appartenente a senza conoscere M.
82
IPOTESI COMPOSITE
• In generale il limite può essere raggiunto per
ogni particolare semplicemente progettando un
normale LRT per quel particolare .
• Ogni UMP test deve essere non meno buono di altro
test per quel particolare . Ciò fornisce una condizione
necessaria e sufficiente per la sua esistenza.
PROPRIETA’:
Un test UMP esiste se e solo se il test LRT per ogni
appartenente a può essere completamente definito
(inclusa la soglia) senza la conoscenza di .
• Il ‘se’ della proprietà è ovvio. Il ‘solo se’ segue
direttamente dalla nostra discussione nel paragrafo
precedente: se esiste per cui non possiamo
trovare un LRT senza conoscere , dovremmo usare
un altro test perché non conosciamo . Però
questo test sarà inferiore per quel particolare al
test LRT e quindi non è uniformemente il più potente.
83
IPOTESI COMPOSITE
Esempio 2
• Ritorniamo all’esempio e usiamo il risultato ottenuto
dalla seguente figura:
• Sappiamo che il test di verosimiglianza è:
H1
R
H0
e
R2
1
dR
PF
exp
se M 0
2
2
2
L’apice + indica che M assume solo valori positivi.
84
IPOTESI COMPOSITE
Esempio 2
• Questo è mostrato nella seguente figura:
• Analogamente, se M è minore di zero:
H0
e
R
H1
R2
1
dR
PF
exp
2 2
2
se M 0
85
IPOTESI COMPOSITE
Esempio 2
• Rispetto all’esempio 1 traiamo le seguenti conclusioni:
1. Se M può assumere solo valori non negativi, allora
esiste il test UMP.
2.Se M può assumere solo valori non positivi, allora
esiste il test UMP.
3.Se M può assumere valori positivi e negativi, allora il
test UMP non esiste.
• Nella seguente figura è mostrata la funzione potenza
per i test LRT ottenuti sotto l’ipotesi che M sia positivo.
86
IPOTESI COMPOSITE
• Ogni volta che il test UMP esiste, lo usiamo e il test
lavora bene come se conoscessimo .
• Un problema più difficile si ha quando il test UMP non
esiste.
• Discuteremo ora alcuni test possibili per il caso in cui
non esiste il test UMP.
• Confiniamo la nostra discussione ad una possibile
procedura di test, il test di verosimiglianza
generalizzato.
• Se conosciamo il segno di M:
Il test UMP esiste perche’,per Neym.Pears., serve solo
PF e questa dipende solo da p(R|Ho). In questo caso
se p(R|Ho) e’ nota e non dipende da M (fissata pF, fisso
la soglia).
• Se non conosciamo il segno di M, anche fissato PF, non
sappiamo fissare la soglia (conosciamo |Rth|, ma non
il segno).
87
IPOTESI COMPOSITE
Test di verosimiglianza generalizzato
• Il limite di misurazione perfetta suggerisce che una
procedura logica consista nello stimare assumendo
che H1 sia vera, quindi nello stimare assumendo che
H0 sia vera ed nell’usare queste stime nel test di
verosimiglianza, come se fossero corrette.
• Se sono usate le stime a massima verosimiglianza
il risultato è chiamato LRT generalizzato.
• In particolare:
max pr|1 ( R | 1 ) H1
g( R ) 1
max pr| 0 ( R | 0 )
0
H0
dove 1 assume tutti i valori in H1 e 0 assume tutti i
valori in H0.
• In altre parole, facciamo una stima ML di 1 assumendo
che sia vera l’ipotesi H1, quindi valutiamo pr|1(R|1)
per 1 ˆ1e usiamo questo valore al numeratore. Una
procedura simile fornisce il valore per il denominatore.
88
IPOTESI COMPOSITE
Esempio 2
• Riprendiamo i dati dell’esempio 1, quindi = M.
• Anziché una, abbiamo N osservazioni indipendenti,
che denotiamo con il vettore R.
• Le densità di probabilità sono:
( R M )2
1
pr|m ,H1 ( R | M , H1 )
exp i
2 2
i 1 2
N
R2
1
pr|m ,H 0 ( R | M , H 0 )
exp i
2 2
i 1 2
N
• In questo esempio H1 è un’ipotesi composita, mentre
H0 è un’ipotesi semplice.
89
IPOTESI COMPOSITE
Esempio 2
• Dalla stima a massima verosimiglianza otteniamo:
N
(come visto prima)
Ri
quindi
Mˆ 1 i 1
N
2
N
R
(
1
/
N
)
R
i 1 j
1
i
exp
2
2
2
H1
i 1
g( R )
N 1
R2
H0
exp i
2 2
i 1 2
N
• Cancellando i termini comuni ed applicando il logaritmo:
2H
N 1
Ri ln
ln g ( R )
2
2 N i 1 H
0
• Il termine a sinistra è sempre maggiore o uguale a zero,
così può sempre essere scelto maggiore o uguale a uno.
un test equivalente è:
2H
1
1 NR 2
1 i 1
N 2 i 1 H 0
dove 1 è maggiore o uguale a zero. Equivalentemente:
1
| z |
1
N
H1
Ri
1
1
N 2 i 1
H0
90
IPOTESI COMPOSITE
Esempio 2
• La funzione di potenza di questo test si ricava
facilmente.
• La variabile z ha una varianza pari a 2; su H0 la sua
media è zero e su H1 la sua media è M N
• Le densità di probabilità sono riportate nella figura
seguente.
91
IPOTESI COMPOSITE
Esempio 2
• Si ha che:
1
1
Z2
Z2
1
dZ
dZ
PF
exp
exp
2 2
2 2
2
2
1
2erfc 1
e
1
( Z M N )2
1
dZ
PD ( M )
exp
2
2
2
( Z M N )2
1
dZ
exp
2
2
1 2
M N
M N
erfc 1
erfc 1
92
IPOTESI COMPOSITE
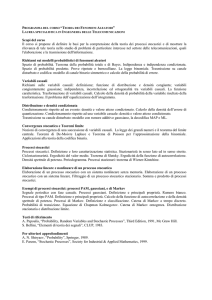
Esempio 2
• La funzione di potenza risultante è riportata nella
figura seguente:
• Nella figura è riportato il limite di misurazione
perfetta per fare un confronto. Come ci si aspetta,
la differenza si avvicina a zero quando
M N
93
IPOTESI COMPOSITE
Esempio 2
• Come esistono casi in cui la stima ML fornisce
risultati scarsi, ci sono casi in cui il test di
verosimiglianza generalizzato fornisce risultati
scadenti.
• In questi ultimi casi dobbiamo cercare altre procedure
test.
• Fortunatamente, nella maggior parte dei problemi
fisici di interesse sia il test UMP che il test di
verosimiglianza generalizzato danno risultati
soddisfacenti.
94