Le Simmetrie
(costruzioni)
Le simmetria costituiscono un argomento di estrema
importanza sia in matematica che nelle scienze, in natura
e nell’arte e nell’architettura.
Una simmetria è, in genere, una operazione che muove o
trasforma un oggetto lasciandone però inalterato l'aspetto.
In questa presentazione come devono essere costruite
figure geometriche che sono soggette a simmetrie o in
genere a trasformazioni geometriche.
Trasformazione geometrica
Una trasformazione geometrica è una funzione
biunivoca che ad ogni punto del piano associa uno
ed un solo punto del piano stesso.
Tra le trasformazioni geometriche di notevole
importanza vi è la trasformazione isometrica.
Trasformazione Isometrica
Una trasformazione geometrica si dice isometrica se
essa conserva le distanze.
Le principali trasformazioni isometriche vi sono:
•Le simmetria assiali;
•Le simmetria centrali;
•Le traslazioni;
•Le rotazioni.
Simmetria assiale
Per definire cosa è una simmetria assiale si esegue
prima una costruzione geometrica, successivamente
verranno fornite le sue caratteristiche.
La costruzione verrà eseguita mediante il programma di
matematica GeoGebra.
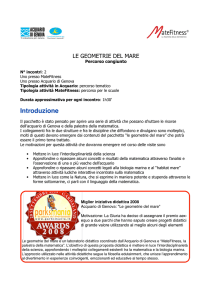
Simmetria assiale di un punto
Si indica con r la simmetria assiale di asse r.
Inoltre sia A il punto di
cui
effettuare
la
simmetria
assiale
rispetto
all’asse
di
simmetria r.
Simmetria assiale di un punto
Dal punto A si traccia la
perpendicolare,
a,
all’asse di simmetria r.
Simmetria assiale di un punto
La retta a interseca
l’asse di simmetria r nel
punto H.
Simmetria assiale di un punto
Con centro nel punto H
si traccia un arco di
circonferenza, d, il cui
raggio, R, vale:
R = [AH]
Simmetria assiale di un punto
Sia F il punto di
intersezione tra l’arco di
circonferenza, d, e la
retta a.
Dalla costruzione
deduce che:
R = [AH] = [HF]
si
Simmetria assiale di un punto
In sintesi:
Il punto F è il simmetrico di
A rispetto alla retta r. Inoltre
si ha che i segmenti
b = [AH]
e = [FH]
sono
isometrici
congruenti (o uguali).
b = [AH] = [FH] = e
o
Simmetria assiale di un punto definizione
Dalla costruzione della simmetria assiale ortogonale
(ortogonale poiché la retta a è perpendicolare all’asse di
simmetria r) del punto A, si può definire la simmetria assiale
(o riflessione), r, come una trasformazione geometrica che,
assegnato una retta r, associa ad ogni punto A del piano il punto
F (unico), simmetrico di A rispetto alla retta r (r = asse di
simmetria).
r : A F
r A F
Simmetria assiale di un punto
Un caso particolare di simmetria assiale di un punto è quello in
cui il punto A è un punto dell’asse di simmetria. In questo caso
il simmetrico di A è il punto stesso A.
r : A A
r A A
Simmetria assiale di un segmento
Dopo aver illustrato il modo cui si costruisce il simmetrico di
un punto rispetto ad una retta, si costruirà il simmetrico di un
segmento, [AB], rispetto alla retta r.
Per costruire il simmetrico
del segmento [AB], è
necessario osservare che un
segmento è individuato dai
suoi due punti estremi A e
B. Pertanto, per costruire il
simmetrico di [AB] è
necessario
trovare
i
simmetrici dei punti A e B.
Simmetria assiale di un segmento
Dal punto A si traccia la retta b perpendicolare all’asse di
simmetria r.
Simmetria assiale di un segmento
Dal punto E di intersezione della retta b con l’asse di
simmetria, r, si traccia un arco di circonferenza, d, di raggio
R= [AE]
Simmetria assiale di un segmento
L’intersezione dell’arco di circonferenza, d, con la retta b è il
punto A1. Il punto A1 è il simmetrico del punto A rispetto
all’asse r.
Per trovare il simmetrico
di B rispetto all’asse r si
ripete la costruzione fatta
per trovare il simmetrico
di A.
Si inizia tracciando la
perpendicolare, e, alla
retta r.
Simmetria assiale di un segmento
Ripetendo la costruzione si ottiene che il punto B1 è il
simmetrico di B rispetto all’asse r.
Simmetria assiale di un segmento
Collegando i punti A1 e B1 si ottiene il segmento h:
h = [A1B1]
Simmetria assiale di un segmento
Il segmento [A1B1] è il simmetrico del segmento [AB] rispetto
all’asse di simmetria r.
Una
conseguenza
della
costruzione è che i due
segmenti, [AB] e [A1B1], sono
isometrici o congruenti.
[AB] = [A1B1]
Simmetria assiale di un segmento
In sintesi, in una simmetria assiale ortogonale, ad un segmento
corrisponde un segmento la cui lunghezza è identica al primo
segmento.
r : [ AB ] [ A1B1 ]
r [ AB ] [ A1B1 ]
[AB] [A1B1 ]
Simmetria assiale di un segmento
Per verificare che i due segmenti sono isometrici, si considera il
caso particolare in cui un estremo del segmento appartiene
all’asse di simmetria.
Da come è stata effettuata la
costruzione, si constata che si
vengono a formare due triangoli
rettangoli:
[AEB] e [A1EB1]
Simmetria assiale di un segmento
I due triangoli rettangoli, [AEB]
e [A1EB1], sono isometrici (o
congruenti) poiché:
1) Hanno entrambi un angolo
retto;
2) Per
costruzione
sono
isometrici i due lati [AEB] e
[A1EB1];
3) Il lato [AE] è in comune.
Pertanto si ha che:
[AB] [A1B1]
Simmetria assiale di un poligono
Una estensione della simmetria assiale di un punto e di un segmento
è la simmetria assiale di un poligono (simmetria assiale di un
triangolo.)
Simmetria assiale di un poligono
Per ognuno dei vertici del triangolo si effettua la costruzione per
individuare i punti simmetrici rispetto ad un asse di simmetria.
Simmetria assiale di un poligono
Per ognuno dei vertici del triangolo si effettua la costruzione per
individuare i punti simmetrici rispetto ad un asse di simmetria.
Simmetria assiale di un poligono
Per ognuno dei vertici del triangolo si effettua la costruzione per
individuare i punti simmetrici rispetto ad un asse di simmetria.
Simmetria assiale di un poligono
Per ognuno dei vertici del triangolo si effettua la costruzione per
individuare i punti simmetrici rispetto ad un asse di simmetria.
Simmetria assiale di un poligono
Per ognuno dei vertici del triangolo si effettua la costruzione per
individuare i punti simmetrici rispetto ad un asse di simmetria.
Simmetria assiale di un poligono
Collegando i punti simmetrici si ottiene di nuovo un triangolo.
Simmetria assiale di un poligono
In seguito ad una simmetria assiale ortogonale il triangolo [ABC]
viene trasformato nel triangolo [A1B1C1].
r :[ ABC] [ A1B1C1 ]
r [ ABC] [ A1B1C1 ]
Come già visto e dimostrato in precedenza, i lati dei due
triangoli sono isometrici, o congruenti, tra di loro.
Simmetria assiale di un poligono
Dalla isometria dei lati discende, per il terzo criterio di isometria di
due triangoli, che sono isometrici anche gli angoli. Nei due triangoli
la lettura degli avviene in senso opposto.
Simmetria assiale di un poligono
Per un poligono qualsiasi valgono le stesse considerazioni fatte per il
triangolo: 1) i lati sono ordinatamente isometrici; 2) gli angoli sono
ordinatamente isometrici. Inoltre il verso di lettura sia dei lati che degli
angoli è opposto.
Simmetria centrale
Per definire e costruire una simmetria centrale rispetto ad un punto O,
verrà costruito il simmetrico di un punto A rispetto al punto O.
Si fissa un punto O, centro di simmetria. Si considera un punto A.
Simmetria centrale
Si traccia la retta r passante per i punti O ed A.
Simmetria centrale
Con apertura di compasso di centro O (centro di simmetria) e raggio,
R, pari al segmento [OA] si traccia l’arco di circonferenza d.
Simmetria centrale
L’arco di circonferenza, d, interseca la retta r nel punto D.
Simmetria centrale
Per costruzione, i due segmenti, [AO] e [OD], che vengono individuati
sono isometrici o congruenti.
AO OD
Dalla costruzione effettuata, si deduce che il punto O è il punto medio
del segmento [AD.
Simmetria centrale
Il punto D, che è stato costruito, si chiama simmetrico di A rispetto ad
O.
Simmetria centrale
La simmetria centrale, O, di centro O è una trasformazione che
ad ogni punto, A, associa un punto, D, del piano che è simmetrico
rispetto al punto O.
O : A D
O ( A) D
Simmetria centrale - segmento
Adesso verrà eseguita la costruzione della simmetria del segmento
[AB] rispetto al centro O.
Il segmento, [AB], viene
disegnato in modo orientato.
Simmetria centrale - segmento
Dal punto B si traccia la retta s che passa per il centro O.
Simmetria centrale - segmento
Con centro nel punto O e raggio, R, uguale al segmento [OB] si
traccia un arco di circonferenza.
Simmetria centrale - segmento
L’arco di circonferenza incontra la retta s nel punto B'
Simmetria centrale - segmento
Si ripete la costruzione per il punto A.
Simmetria centrale - segmento
Si ripete la costruzione per il punto A.
Simmetria centrale - segmento
Si ripete la costruzione per il punto A.
Simmetria centrale - segmento
Dopo aver costruito il punto A', simmetrico di A rispetto al centro
O, si congiungono i punti A e B. Si ottiene il segmento v=[AB].
Simmetria centrale - segmento
I due segmenti, [AB] e [AB], sono isometrici. Infatti
considerando in due triangoli [AOB] e [AOB] sono isometrici o
congruenti perché:
1) [AO]=[AO] per
costruzione;
2) [BO]=[BO]
costruzione;
per
3) = perché angoli
opposti al vertice.
Simmetria centrale - segmento
Dalla isometria dei due triangoli si deduce che:
1) [AB]=[AB
2) Gli angoli in B e B
sono isometrici;
3) Gli angoli in A e A
sono isometrici.
Dalla isometria degli angoli si deduce che i due segmenti [AB] e
[AB] risultano paralleli.
Simmetria centrale - segmento
In sintesi: in una simmetria centrale di centro O, ad un segmento vi
corrisponde un segmento isometrico e parallelo al primo.
L’orientamento del segmento simmetrico è opposto al segmento
originale.
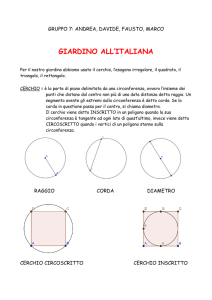
Simmetria centrale - Poligono
Una estensione della simmetria centrale di un segmento è la
simmetria centrale, di centro O, di un poligono.
Si prende in considerazione il
poligono [ABCD] ed un
punto
O,
centro
di
simmetria.
Simmetria centrale - Poligono
Per ognuno dei vertici del poligono, A, B, C, D, si esegue la
simmetria centrale rispetto al punto O; si ottengono i punti
simmetrici A, B, C, D.
Simmetria centrale - Poligono
Collegando i punti simmetrici A, B, C, D si ottiene il poligono,
[ABC D], simmetrico del poligono [ABCD].
I lati dei due
poligoni sono
isometrici
e
paralleli.
Il
verso
di
percorrenza dei
vertici
è
opposto nei due
poligoni.
Simmetria centrale - Poligono
A causa del parallelismo dei lati (originale e simmetrico) gli angoli
dei due poligono sono a due a due isometrici. Pertanto i due
poligono, l’originale ed il simmetrico, sono isometrici o congruenti.
Traslazione - Punto
La traslazione è una trasformazione geometrica in cui ad un punto
corrisponde un punto, ad un segmento corrisponde un segmento le
cui caratteristiche saranno definite al termine della costruzione.
La traslazione non è altro che la conseguenza di una doppia
simmetria assiale, dove gli assi di simmetria sono paralleli. Pertanto
le costruzioni delle varie figure geometriche sono identiche a ciò
che è stato fatto in precedenza.
La prima costruzione che verrà effettuata sarà la traslazione di un
punto.
Traslazione - Punto
Per effettuare la traslazione di una figura geometrica è necessario
disegnare due rette parallele, r e s, poste ad una distanza d
Traslazione - Punto
Si prende in considerazione un punto A, di cui è necessario
effettuare una traslazione.
Traslazione - Punto
La prima costruzione da effettuare è quella di trovare il simmetrico
del punto A rispetto alla retta r (simmetria assiale di un punto
rispetto ad una retta.) Dal punto A si traccia la perpendicolare, a,
rispetto all’asse di simmetria r.
Traslazione - Punto
La perpendicolare, a, interseca le due rette parallele, r e s, che
sono i due assi di simmetria, nei punti N e K. La distanza tra i due
punti di intersezione, [NK], è uguale alla distanza, d, tra le due rette
parallele.
d NK
Traslazione - Punto
Mediante la costruzione effettuata in precedenza si costruisce il
simmetrico di A rispetto all’asse di simmetria r. Il punto A è il
simmetrico di A rispetto alla retta r. Dalla costruzione si deduce
che:
AN NA'
Traslazione - Punto
Dopo alla prima simmetria, si effettua una seconda simmetria
assiale, che è quella del punto A rispetto alla retta s. Dopo aver
eseguito la costruzione si ottiene il punto A. Dalla costruzione si
deduce che:
A' K KA' '
Traslazione - Punto
Dopo aver effettuata le costruzioni di due simmetrie assiali con assi
paralleli, si deduce che la distanza, t, tra il punto A ed il suo traslato
A vale:
t AA' ' AN NA' A' K KA' '
Traslazione - Punto
Dalle uguaglianze:
AN NA'
e
A' K KA' '
elaborando l’espressione della distanza t, si deduce che.
t AA' ' NA' NA' A' K A' K
t AA' ' 2 NA' 2 A' K
t AA' ' 2 NA' A' K
Traslazione - Punto
Poiché la distanza, d, tra le due rette parallele, r e s, vale:
d NK NA' A' K
sisideduce
deduceche.
che.
t AA' ' 2 NA' A' K
tt AA
AA'' '22dd
Quindi la distanza, t, tra il punto originale, A, ed il punto traslato,
A, è uguale al doppio della distanza tra i due assi paralleli, r e s.
Traslazione - Segmento
Per verificare che effettivamente una doppia simmetria assiale ad
assi paralleli è effettivamente una traslazione è opportuno prendere
in considerazione come minimo un segmento. Sia [AB] il segmento
da traslare.
Traslazione - Segmento
Per il segmento [AB] si effettua la simmetria assiale rispetto
all’asse r. La costruzione del segmento simmetrico, [AB], è stata
già descritta in precedenza.
Traslazione - Segmento
Il secondo passaggio da effettuare è la simmetria assiale del
segmento [AB] rispetto all’asse s. Ovviamente la costruzione del
segmento simmetrico, [AB], è stata già descritta in precedenza.
Traslazione - Segmento
Il segmento originale [AB] ed il segmento [AB], conseguenza di
due consecutive simmetrie assiali rispetto a due assi paralleli, sono
isometrici e paralleli.
AB A' ' B' '
AB//A' ' B' '
Traslazione - Segmento
La distanza tra i due segmenti, [AB] e [AB], è il doppio della
distanza tra i due assi paralleli rispetto ai cui sono state effettuate le
simmetrie assiali. Tale distanza viene indicata con il vettore v.
v AB A' ' B' ' 2 d
Traslazione - Poligono
Una estensione della traslazione di un segmento è la traslazione di
un poligono.
Siano:
1) [ABCD] il poligono da traslare;
2) r e s i due assi di simmetria paralleli tra di loro e distanti d.
Traslazione - Poligono
[ABCD] è il poligono da traslare.
Traslazione - Poligono
Dai vertici A, B, C e D si tracciano le rette e, f, g, h perpendicolari
agli assi di simmetria.
Traslazione - Poligono
Il poligono [ABCD] è il poligono simmetrico di [ABCD]
rispetto all’asse r.
Traslazione - Poligono
Il poligono [ABCD] è il poligono simmetrico di [ABCD]
rispetto all’asse s.
Traslazione - Poligono
La conseguenza della doppia simmetria assiale con assi paralleli è
di traslare il poligono [ABCD] nel [ABCD]. Inoltre ad angoli
corrispondono angoli congruenti, ed a segmenti corrispondono
segmenti paralleli e congruenti. La traslazione, u, è il doppio della
distanza tra gli assi paralleli.
Traslazione - Poligono
La traslazione di un poligono
può avvenire anche in senso
verticale. La costruzione è
identica a quella orizzontale.
Inoltre le conclusioni sono le
stesse: ad angoli corrispondono
angoli congruenti; a segmenti
corrispondono
segmenti
congruenti e paralleli.
Traslazione - Poligono
Combinando i due tipi di traslazione, verticale ed orizzontale, si
ottiene una traslazione obliqua.
Traslazione - Poligono
In sintesi:
La traslazione, , è una trasformazione geometrica che:
1) ad angoli fa corrispondere angoli isometrici o congruenti;
2) a segmenti fa corrispondere segmenti isometrici o congruenti e
paralleli.
Rotazione
La rotazione è una trasformazione geometrica che, fissato un
punto, O, detto centro di rotazione, ed un angolo orientato, , fa
ruotare una figura geometrica intorno al punto O di un angolo .
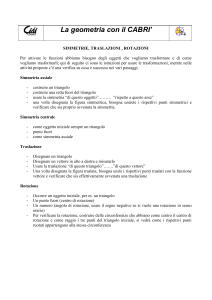
Rotazione
Il poligono da ruotare è [ABCDEF]. Il centro di rotazione è O.
L’angolo di rotazione è . Il poligono ruotato è [A'B'C'D'E'F'].
Rotazione - Punto
Per costruire un a figura ruotata, si parte dalla rotazione
di un punto.
Sia A il punto da
ruotare. Allora si
fissa una retta r.
Rotazione - Punto
Si trova il simmetrico del punto A rispetto all’asse di
simmetria r. Si ottiene il punto A. La costruzione è già
stata spiegata in precedenza.
Rotazione - Punto
Si tracci una seconda retta s, che intersechi la prima
retta r nel punto O.
Rotazione - Punto
Si esegue la simmetria assiale del punto A rispetto alla
retta s. Si ottiene il punto A.
Rotazione - Punto
Analisi della costruzione
bc
La retta r, essendo asse di
simmetria passa per il punto
medio del segmento [AA].
Inoltre tutti i punti delle
retta, come spiegato in una
precedente costruzione, sono
equidistanti dai punti A e A.
Quindi i segmenti b e c, che
collegano il punto O con i
due punti A e A, sono
isometrici o congruenti.
Quindi:
Rotazione - Punto
Analogo discorso si esegue
per il punto A ed il suo
simmetrico A.
Il punto O, appartenente alla
retta di simmetria s, è
equidistante dai punti A e
A. Pertanto i segmenti c ed
a
sono
isometrici
o
congruenti. Quindi
ca
Rotazione - Punto
Riassumendo i risultati, si
ottiene:
aabbcc
Pertanto i tre punti A, A
e A sono equidistanti
da un unico punto O.
Quindi essi appartengono
ad una circonferenza di
centro O e raggio:
R abc
Rotazione - Punto
L’arco f collega i tre
punti, A, A e A. Il
punto A è il risultato
della rotazione del
punto A.
Pertanto la rotazione
di un punto si ottiene
eseguendo
due
simmetrie assiali, i cui
assi si intersecano in
un punto, O, che è il
centro di rotazione.
Rotazione - Punto
L’angolo è l’angolo
di rotazione del punto
A intorno al centro O.
Rotazione - Punto
L’angolo è l’angolo
formato dagli assi di
simmetria. Esso è la
semisomma
degli
angoli al vertice O dei
due triangoli isosceli
[AOA] e [AOA].
[ AOA ' ] [ A' OA ' ' ]
2
2
Rotazione - Punto
L’angolo
rotazione, , è
doppio dell’angolo,
formato dagli assi
simmetria.
2
di
il
,
di
Rotazione di un segmento
Adoperando la stessa tecnica con cui è stata effettuata la
rotazione di un punto, è possibile effettuare anche la rotazione
di un segmento.
Rotazione di un segmento
Si prende in esame il segmento [AB], di cui si vuole effettuare
la rotazione. Inoltre sia c il primo asse di simmetria.
Rotazione di un segmento
Si esegue la simmetria assiale del segmento [AB] rispetto
all’asse c. Il segmento simmetrico è [AB].
Rotazione di un segmento
Come già detto in precedenza, i due segmenti [AB] e [AB] sono
uguali.
v [ AB ] [ A' B' ] w
Rotazione di un segmento
Si
traccia
il
secondo asse di
simmetria, b.
Rotazione di un segmento
Si esegue la
simmetria assiale
del
segmento
[AB]
rispetto
all’asse b.
Si
ottiene
il
segmento
[AB]. I tre
segmenti, v, w e
z
sono
isometrici.
v [ AB ] w [ A' B' ] z [ A' ' B' ' ]
Rotazione di un segmento
Le due terne di
punti, [B,B,B] e
[A,A,A], dei tre
segmenti
si
trovano
sullo
stesso arco di
circonferenza il
cui centro, O, è il
punto
di
intersezione dei
due
assi
di
simmetria.
Rotazione di un segmento
Le due terne di
punti, [B,B,B] e
[A,A,A], dei tre
segmenti
si
trovano
sullo
stesso arco di
circonferenza il
cui centro, O, è il
punto
di
intersezione dei
due
assi
di
simmetria.
Rotazione di un segmento
L’angolo
di
rotazione, , del
segmento [AB] è
doppio
dell’angolo, ,
formato dagli assi
di simmetria.
2
Rotazione di un segmento
Nella rotazione a segmenti corrispondono segmenti congruenti.
Ciò costituisce una conseguenza della doppia simmetria assiale.
Infatti in una simmetria assiale a segmenti corrispondono
segmenti isometrici.
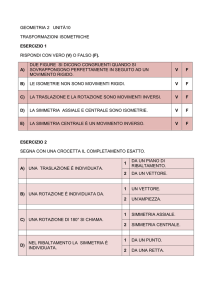
Rotazione di un poligono
Il poligono è una spezzata chiusa non intrecciata, per cui la sua
rotazione intorno ad un punto sarà la conseguenza della somma
delle rotazioni di tutti i suoi lati.
Rotazione di un poligono
Il poligono da ruotare è [ABCD]. La retta s è il primo asse di
simmetria.
Rotazione di un poligono
Mediante le costruzioni esaminate in precedenza, si esegue la
simmetria assiale del poligono [ABCD] rispetto alla retta s. Si
ottiene il poligono simmetrico [ABCD].
Rotazione di un poligono
Si disegna una seconda retta, r. Questa interseca la prima retta,
s, nel punto O.
Rotazione di un poligono
Si esegue la simmetria del poligono [ABCD] rispetto alla
seconda retta, r. Si ottiene il poligono [ABCD].
Rotazione di un poligono
Un vertice, A, del poligono ed i suoi simmetrici, A e A,
appartengono ad un arco il cui centro, O, è il punto di
intersezione dei due assi di simmetria.
Rotazione di un poligono
Le considerazioni fatte per i vertici A, A e A, si estendono a
tutti gli altri vertici.
Quindi
la
rotazione di un
poligono è la
conseguenza di
una
doppia
simmetria
assiale i cui assi
si intersecano in
un punto, O, che
è il centro di
rotazione.
Rotazione di un poligono
I segmenti m e n sono due segmenti che collegano il centro di
rotazione con i vertici originale e ruotato, C e C.
Come già notato
in precedenza i
due segmenti, m
e
n,
sono
isometrici.
mn
Rotazione di un poligono
L’angolo tra gli assi di simmetria è .
Rotazione di un poligono
L’angolo tra i segmenti m e n è . Come già notato in
precedenza l’angolo di rotazione è il doppio dell’angolo, ,
formato dagli assi di simmetria.
Rotazione di un poligono
In conclusione, nella rotazione a segmenti e ad angoli
corrispondono segmenti ed angoli isometrici.
Trasformazioni geometriche
Le costruzioni effettuate costituiscono delle trasformazioni
geometriche.
Definizione: Una trasformazione geometrica è una
corrispondenza biunivoca che ad ogni punto di una figura
geometrica del piano fa corrispondere un unico punto del piano
stesso.
Facendo riferimento alla
figura, si nota che ad ogni
punto del poligono da
ruotare vi corrisponde un
unico punto del poligono
ruotato.
Isometrie
Casi particolari di trasformazione geometrica sono le isometrie. In queste
trasformazioni geometriche in cui le ampiezze degli angoli e le lunghezze
dei segmenti rimangono invariate. Ciò significa che la figura originale e la
figura ottenuta mediante una isometria sono isometriche o congruenti.
Quindi una isometria trasforma:
1)Rette incidenti in rette incidenti;
2)Rette parallele in rette parallele;
3)Un angolo in un angolo ad esso
congruente;
4) a
segmenti
corrispondono
segmenti congrueneti.
Isometrie
Le principali isometrie sono:
1) Simmetria assiale, a;
2) Simmetria centrale O ;
3) Traslazione ;
4) Rotazione ρO.