Metodi Statistici e Probabilistici per l’Ingegneria
MODELLI PROBABILISTICI
Corso di Laurea in Ingegneria Civile
Facoltà di Ingegneria, Università di Padova
Docente: Dott. L. Corain
E-mail: [email protected]
Home page: www.gest.unipd.it/~livio/Corso_Civile.html
MODELLO PROBABILISTICI
1
SOMMARIO
¾ Teoria della probabilità: concetti generali
¾ Modelli probabilistici per le variabili discrete:
distribuzione binomiale e binomiale negativa
distribuzione di Poisson
¾ Modelli probabilistici per le variabili continue:
distribuzione normale (o gaussiana)
distribuzione log-normale
distribuzione di Gumbel e GEV
trasformazioni dei dati discreti
¾ Procedure di goodness-of-fit:
test Chi-quadrato
test di Anderson-Darling
MODELLO PROBABILISTICI
2
1
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
La probabilità può essere definita come un numero che
esprime la possibilità, il grado di verosimiglianza con cui un
evento è destinato a verificarsi.
Si parla così della probabilità di pescare una carta nera da
un mazzo di carte, della probabilità che in un campione
d’aria siano presenti 10 particelle di amianto per unità di
volume o della probabilità che un processo produttivo
realizzi prodotti rispondenti ai requisiti (di legge, di progetto,
di contratto, ecc.).
La probabilità è una proporzione o frazione che varia tra i
valori 0 e 1, estremi inclusi. Associamo il valore zero a un
evento che non ha nessuna possibilità di verificarsi (evento
impossibile) e il valore uno a un evento che si verificherà
sicuramente (evento certo). Tra due estremi, si collocano
eventi più o meno probabili.
MODELLO PROBABILISTICI
3
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
In teoria della probabilità, una variabile casuale (o variabile
aleatoria – v.a.) può essere pensata come il risultato
numerico di un esperimento quando questo non è
prevedibile con certezza (ossia non è deterministico).
Ad una variabile casuale X si associa la sua distribuzione,
o legge di probabilità PX, che assegna ad ogni sottoinsieme
dell'insieme dei possibili valori di X (eventi) la probabilità che
la variabile casuale X assuma valore in esso. Le variabili casuali si dividono principalmente in due grandi classi:
discrete, se l'insieme dei possibili valori (o supporto di X)
è finito o numerabile;
continue, se l'insieme dei possibili valori è l’insieme dei
numeri reali.
MODELLO PROBABILISTICI
4
2
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
Per caratterizzare una variabile casuale X, dobbiamo
specificarne la sua distribuzione, o legge di probabilità PX,
che può essere, in base al tipo di variabile casuale, di due
tipi:
funzione di probabilità: p(x) = P(X=x), se la variabile
aleatoria è discreta;
funzione di densità di probabilità: f(x), tale per cui
P(X ∈ A) = ∫A f(x) dx, se la variabile aleatoria è continua.
Le due funzioni p(x) e f(x) dipenderanno da uno o più
parametri (p, µ, σ, ecc.). Fissati i valori dei parametri, è
possibile calcolare la probabilità di eventi di interesse,
ovvero che la variabile X assume dei valori specifici.
Si noti che nelle applicazioni reali i parametri sono
ovviamente ignoti e non osservabili, ma possono essere
stimati attraverso una procedura di inferenziale di stima.
MODELLO PROBABILISTICI
5
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
La media µ di una distribuzione di probabilità si dice valore
medio (o valore atteso) della variabile aleatoria.
Il valore atteso di una variabile aleatoria discreta è una
media ponderata delle modalità (valori) assunte dalla
variabile, dove i coefficienti di ponderazione sono
rappresentati dalle probabilità associate a ciascuna modalità
Valore atteso di una variabile aleatoria discreta
N
µ = E ( X ) = ∑ X i P( X i )
i =1
dove Xi = i-esima modalità della variabile aleatoria X
P(Xi) = probabilità associata alla modalità Xi
MODELLO PROBABILISTICI
6
3
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
La varianza σ2 di una variabile aleatoria discreta è definita
come la media ponderata dei quadrati delle differenze tra
ciascuna modalità e il valore atteso della variabile, dove i
coefficienti di ponderazione sono rappresentati dalle
probabilità associate a ciascuna modalità.
Varianza di una variabile aleatoria discreta
N
σ = ∑ [ X i − E ( X )]2 P( X i )
2
i =1
dove Xi = i-esima modalità della variabile aleatoria X
P(Xi) = probabilità associata alla modalità Xi
Lo scarto quadratico medio σ di una variabile aleatoria
discreta è dato dalla radice quadrata della varianza: σ=√σ2
MODELLO PROBABILISTICI
7
TEORIA DELLA PROBABILITÀ: CONCETTI GENERALI
La media (o valore atteso) µ e la varianza σ2 (e la deviazione
standard σ) di una v.a. X sono i parametri di maggiore
interesse della distribuzione di probabilità di X, in quanto
essi esprimono rispettivamente la tendenza centrale e la
variabilità della v.a. X.
Nel caso la v.a. X sia continua, per il calcolo di µ e la
varianza σ2, l’operatore sommatoria va sostituito con
l’integrale:
La probabilità che la v.a. assuma valori minori od uguali ad
un valore specificato, viene detta funzione di ripartizione:
FX = P (X ≤ x).
MODELLO PROBABILISTICI
8
4
LA DISTRIBUZIONE BINOMIALE
Tra i modelli probabilistici discreti più utilizzati vi è la
distribuzione binomiale, caratterizzata da 4 proprietà:
Si considera un numero prefissato di n osservazioni.
Ciascuna osservazione può essere classificata in due
categorie incompatibili ed esaustive, chiamate per
convenzione successo e insuccesso
La probabilità di ottenere un successo, p, è costante per
ogni osservazione, così come la probabilità che si
verifichi un insuccesso, q = (1 – p).
Il risultato di un’osservazione, successo o insuccesso, è
indipendente dal risultato di qualsiasi altra.
La funzione di probabilità della distribuzione binomiale è
definita dall’espressione:
MODELLO PROBABILISTICI
9
LA DISTRIBUZIONE BINOMIALE
Media e varianza della distribuzione binomiale sono
rispettivamente µ = np e σ2 = npq = np(1-p).
Una distribuzione binomiale può essere simmetrica o
asimmetrica in base ai valori assunti dai parametri. Per
qualsiasi valore di n, la distribuzione è simmetrica se p=0.5
e asimmetrica per valori di p diversi da 0.5. L’asimmetria
diminuisce all’avvicinarsi di p a 0.5 e all’aumentare del
numero di osservazioni n.
MODELLO PROBABILISTICI
10
5
LA DISTRIBUZIONE BINOMIALE
La distribuzione binomiale è utilizzata come modello
quando una specifica caratteristica in un campione può
essere riconosciuta (ad esempio la presenza di elementi
difettosi in un lotto).
La distribuzione binomiale è spesso usata come base per
l'elaborazione di schemi di campionamento in accettazione
materia prime e altri materiali.
In tali schemi, q è definito come la probabilità che un
generico campione non sia difettoso (ad esempio, che non
vi siano contaminanti), mentre p è la probabilità che il
campione sia difettoso (ad esempio, vi è almeno un
elemento contaminante) e dove n rappresenta il numero di
totale campioni esaminati.
MODELLO PROBABILISTICI
11
LA DISTRIBUZIONE DI POISSON
In molte applicazioni si è interessati a contare il numero di
volte in cui si osserva la realizzazione di un evento
(contaminazione, incidente, rottura, ecc.) in una certa area
di opportunità.
Un’area di opportunità è un intervallo continuo quale un
tempo, una lunghezza, una superficie, un volume o in
generale un’area nella quale un certo evento può verificarsi
più volte.
Un esempio può essere quello di dello studio degli infortuni
nei cantieri edili: se il numero di medio di incidenti mortali
nel settore edile è pari a 2 incidenti alla settimana, qual è la
probabilità che in due settimane ci siano più di 5 incidenti?
(evento: P(X > 5))?
MODELLO PROBABILISTICI
12
6
LA DISTRIBUZIONE DI POISSON
Per poter utilizzare la distribuzione di Poisson come
modello probabilistico per un problema ingegneristico,
alcune condizioni devono essere soddisfatte:
Il numero di singoli eventi per unità di campionamento
(x) deve essere ben al di sotto del numero max possibile
che potrebbe verificarsi (x→∝);
La probabilità che si verifichi un evento in una
determinata frazione dell’unità di campionamento deve
essere allo stesso tempo costante e molto piccola;
Il verificarsi di un singolo evento in una qualsiasi frazione
dell’unità di campionamento deve né aumentare né
diminuire la probabilità che un altro evento si verifichi;
La dimensione dell’area di opportunità del campione
deve essere piccola rispetto a quella di tutta la
popolazione.
MODELLO PROBABILISTICI
13
LA DISTRIBUZIONE DI POISSON
La funzione di probabilità della distribuzione di Poisson, il
suo valore atteso e la sua varianza, sono definite dalle
seguenti espressioni:
MODELLO PROBABILISTICI
14
7
DISTRIBUZIONE POISSON
MODELLO PROBABILISTICI
15
LA DISTRIBUZIONE BINOMIALE NEGATIVA
Se la seconda e la terza condizione per l'uso della
distribuzione di Poisson non sono soddisfatte, la varianza
della popolazione di solito è maggiore della media (µ < σ2 ).
Tra i vari modelli probabilistici disponibili, la distribuzione
binomiale negativa
è spesso il miglior
modello per
descrivere la distribuzione delle frequenze ottenute.
La distribuzione binomiale negativa è ampiamente usata per
modellare dati di conteggio degli incidenti automobilistici,
che spesso presentano bassi valori medi campionari e
campioni di piccole dimensioni.
La distribuzione binomiale negativa, che descrive il numero
di fallimenti prima del x-esimo successo, quando n è il
numero intero, è definita dall’espressione:
MODELLO PROBABILISTICI
16
8
LA DISTRIBUZIONE BINOMIALE NEGATIVA
Un metodo molto semplice per ottenere un valore
approssimativo per il k può essere ottenuta riordinando
l'equazione per la varianza di una binomiale negativa:
Per ottenere stime più affidabili è opportuno utilizzare il
metodo di stima della massima verosimiglianza.
Il metodo della massima verosimiglianza è implementato dal
software statistico R (non Minitab), tuttavia esiste la
possibilità di effettuare i calcoli usando degli applet presenti
sul web:
http://www.wessa.net/rwasp_fitdistrnegbin.wasp#output
MODELLO PROBABILISTICI
17
MODELLI PROBABILISTICI PER VARIABILI CONTINUE
z
z
z
z
Una funzione di densità di probabilità continua è un
modello che definisce analiticamente come si
distribuiscono i valori assunti da una variabile aleatoria
continua.
Quando si dispone di un’espressione matematica adatta
alla rappresentazione di un fenomeno continuo, siamo in
grado di calcolare la probabilità che la variabile aleatoria
assuma valori compresi in intervalli (gli intervalli sono gli
eventi di interesse, per una v.a. continua).
Tuttavia, si noti che la probabilità che la variabile
aleatoria continua assuma un particolare valore è pari a
zero.
I modelli continui hanno importanti applicazioni in
ingegneria, scienze fisiche e naturale e scienze sociali.
MODELLO PROBABILISTICI
18
9
MODELLI PROBABILISTICI PER VARIABILI CONTINUE
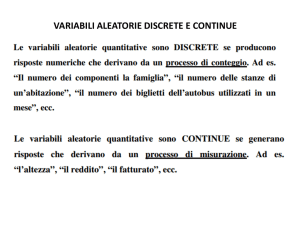
z
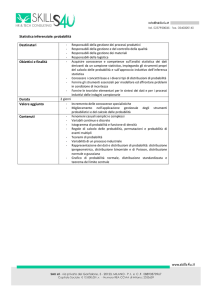
Alcuni tipici fenomeni continui sono gli aspetti
dimensionali dei campioni/prelievi (volume, peso, ecc.) o
il tempo che intercorre fra il verificarsi di due eventi di
interesse (ad esempio un incidente).
z
La figura rappresenta graficamente tre funzioni di
densità di probabilità: normale, uniforme ed
esponenziale.
MODELLO PROBABILISTICI
19
DISTRIBUZIONE NORMALE O GAUSSIANA
La distribuzione normale (o distribuzione Gaussiana) è
la distribuzione continua più utilizzata in statistica.
La distribuzione normale è importante in statistica per tre
motivi fondamentali:
1. Diversi fenomeni continui sembrano seguire, almeno
approssimativamente, una distribuzione normale.
2. La distribuzione normale può essere utilizzata per
approssimare numerose distribuzioni di probabilità
discrete.
3. La distribuzione normale è alla base dell’inferenza
statistica classica in virtù del teorema del limite
centrale.
MODELLO PROBABILISTICI
20
10
DISTRIBUZIONE NORMALE O GAUSSIANA
La distribuzione
caratteristiche:
normale
ha
alcune
importanti
La distribuzione normale ha una forma campanulare e
simmetrica.
Le sue misure di posizione centrale (valore atteso,
mediana) coincidono.
Il suo range interquartile è pari a 1.33 volte lo scarto
quadratico medio, cioè copre un intervallo compreso
tra µ – 2/3σ e µ + 2/3σ.
La variabile aleatoria con distribuzione
assume valori compresi tra -∞ e + ∞.
MODELLO PROBABILISTICI
normale
21
DISTRIBUZIONE NORMALE O GAUSSIANA
MODELLO PROBABILISTICI
22
11
DISTRIBUZIONE NORMALE O GAUSSIANA
Notiamo che, essendo e e π delle costanti matematiche, le
probabilità di una distribuzione normale dipendono soltanto
dai valori assunti dai due parametri µ e σ.
Specificando particolari combinazioni di µ e σ, otteniamo
differenti distribuzioni di probabilità normali.
MODELLO PROBABILISTICI
23
DISTRIBUZIONE NORMALE O GAUSSIANA
Poiché esiste un numero infinito di combinazioni dei
parametri µ e σ, per poter rispondere a quesiti relativi a
una qualsiasi distribuzione normale avremmo bisogno di
in numero infinito di tavole.
Introduciamo ora una formula di trasformazione delle
osservazioni, chiamata standardizzazione, che consente
appunto di trasformare una generica variabile aleatoria
normale in una variabile aleatoria normale standardizzata.
La standardizzazione
Z=
X −µ
σ
Z è la variabile ottenuta sottraendo ad X il suo valore atteso
µ e rapportando il risultato allo scarto quadratico medio, σ.
MODELLO PROBABILISTICI
24
12
DISTRIBUZIONE LOG-NORMALE
In probabilità la distribuzione lognormale, o log-normale, è
la distribuzione di probabilità di una variabile aleatoria X il
cui logaritmo logX segue una distribuzione normale. La
funzione di densità di probabilità della
distribuzione log-normale è data da
Così come la distribuzione normale può fornire
un'approssimazione per la somma di "molte" variabili
aleatorie IID X1,...,Xn (teorema del limite centrale), la
distribuzione log-normale, se le Xi sono positive, può
fornire un'approssimazione per il loro prodotto.
Nell’ambito dell’ingegneria Civile vi sono molti fenomeni
che possono essere ben interpretati dalla distribuzione
log-normale, tra questi la dissipazione delle piogge, la
dispersione dell’amianto, così come anche la resistenza
allo snervamento dell’acciaio è tipicamente modellata in
modo log-normale.
MODELLO PROBABILISTICI
25
DISTRIBUZIONE LOG-NORMALE
MODELLO PROBABILISTICI
26
13
DISTRIBUZIONE DI GUMBEL E GEV
La distribuzione Gumbel viene utilizzata per modellare la
distribuzione del massimo (o il minimo) numero di
campioni, che possono essere estratti da distribuzioni
diverse.
Per esempio potremmo utilizzarla per rappresentare la
distribuzione del livello massimo di un fiume in un
particolare anno, se avessimo a disposizione l'elenco dei
valori massimi degli ultimi anni.
La distribuzione Gumbel risulta utile nel predire la
probabilità di accadimento di eventi estremi quali terremoti
di grande intensità, alluvioni o altri disastri naturali.
La potenziale applicabilità della distribuzione Gumbel per
rappresentare la distribuzione dei massimi si riferisce alla
teoria dei valori estremi che ci suggerisce che essa può
essere di aiuto quando la distribuzione sottostante ai dati
campionari è di tipo normale o esponenziale.
27
MODELLO PROBABILISTICI
DISTRIBUZIONE DI GUMBEL E GEV
La distribuzione di Gumbel può essere vista come un caso
particolare di distribuzione GEV − Generalized Extreme
Value (dei valori estremi generalizzata, anche conosciuta
come distribuzione Fisher-Tippett). La distribuzione è
anche nota come log-Weibull e distribuzione doppio
esponenziale (che viene talvolta usata per riferirsi alla
distribuzione di Laplace).
La funzione di densità f e di ripartizione F (densità
cumulata), dipendenti dai due parametri µ (location) e β
(scale) della distribuzione di Gumbel sono
f =
dove
MODELLO PROBABILISTICI
;
28
14
DISTRIBUZIONE DI GUMBEL E GEV
MODELLO PROBABILISTICI
29
DISTRIBUZIONE DI GUMBEL E GEV
In idrologia, quindi, la distribuzione di Gumbel è utilizzata
per analizzare variabili come valori massimi mensili e
annuali delle piogge giornaliere e volumi di portata dei
fiumi.
Gumbel ha dimostrato che il valore massimo in un
campione di una variabile casuale che segue una
distribuzione esponenziale si avvicina sempre più alla
distribuzione di Gumbel al crescere della dimensione del
campione.
Gumbel ha anche dimostrato che lo stimatore r/(n+1) per
la probabilità di un evento - dove r è il numero di rango del
valore osservato nella serie di dati e n è il numero totale di
osservazioni - è uno stimatore corretto della probabilità
cumulata della moda della distribuzione. Pertanto, questo
stimatore è spesso usato come plotting position del
probability plot.
MODELLO PROBABILISTICI
30
15
DISTRIBUZIONE DI GUMBEL E GEV
In probabilità e statistica, distribuzione dei valori estremi
(GEV) è una famiglia di distribuzioni di probabilità
continue sviluppata all'interno della teoria dei valori
estremi che include le famiglie Gumbel, Fréchet e Weibull,
note anche come distribuzione dei valori estremi di tipo I,
II e III.
Dal teorema dei valori estremi la distribuzione GEV è la
distribuzione limite dei massimi, normalizzati in modo
opportuno, di una sequenza variabili aleatorie IID
(indipendenti e identicamente distribuite).
Per questo motivo, la distribuzione GEV è usato come
approssimazione per modellare i massimi di lunghe (finite)
sequenze di variabili aleatorie.
MODELLO PROBABILISTICI
31
DISTRIBUZIONE DI GUMBEL E GEV
La funzione di densità f e di ripartizione F (densità
cumulata), dipendenti dai tre parametri µ ∈ R — location,
σ > 0 — scale, ξ ∈ R — shape, della distribuzione GEV
sono:
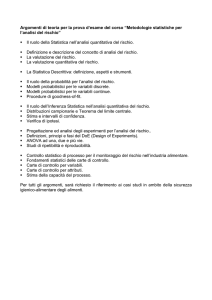
Il parametro di forma ξ
governa il comportamento
della coda della
distribuzione. Le subfamiglie definite da ξ→0,
ξ> 0 e ξ <0 corrispondono,
rispettivamente, alle
famiglie Gumbel, Fréchet
e Weibull, le cui funzioni di
distribuzione cumulativa
sono riportate a destra.
MODELLO PROBABILISTICI
32
16
TRASFORMAZIONI DEI DATI DISCRETI
Non sempre la distribuzione normale si presta ad essere
un modello appropriato per variabili di natura discreta e di
interesse ingegneristico. Questa spesso è però una
condizione importante perché i metodi inferenziali
parametrici sono basati sull’assunzione di normalità (tra
questo, i test ANOVA e t-test per la significatività delle
differenze). Per superare questo problematica, possono
essere prese in considerazione delle trasformazioni dei dati
discreti dette
'normalizzanti‘,
ovvero tali da
rendere la
trasformazione
approssimativamente normale.
MODELLO PROBABILISTICI
33
PROCEDURE DI GOODNESS-OF-FIT
Una volta assunta una funzione p(x) e f(x) adeguata a
rappresentare un problema reale (discreto o continuo), e
disponendo di stime plausibili per i suoi parametri, è
possibile calcolare la probabilità di un qualsiasi evento di
interesse.
Tuttavia, dal momento che la vera legge di probabilità PX di
un fenomeno X rappresenta una caratteristica ignota e non
osservabile della popolazione (come per altro lo sono i
anche i suoi parametri), risulta di interesse valutare la bontà
di adattamento (goodness of fit) di uno specifico modello
probabilistico rispetto ad un campione di dati osservati.
Più propriamente, un test statistico di goodness of fit
consente di prendere una decisione in merito all’ipotesi che
il vero modello della popolazione sia o meno uno prespecificato modello probabilistico.
MODELLO PROBABILISTICI
34
17
TEST CHI-QUADRATO
z
Per verifica l’ipotesi nulla secondo cui legge di
probabilità PX di un fenomeno X è uguale a P0,
H0: PX = P0
contro l’alternativa
H1: PX ≠ P0
si può considerare la statistica χ2
Statistica test χ2 per il confronto tra leggi di probabilità:
∑
χ =
2
tutte le celle
z
( f0 − fe )
2
fe
La statistica χ2 si ottiene calcolando per ogni cella di una
tabella di contingenza la differenza al quadrato fra la
frequenza osservata (f0) e quella attesa (fe), divisa per fe,
e sommando quindi il risultato ottenuto per ogni cella.
35
MODELLO PROBABILISTICI
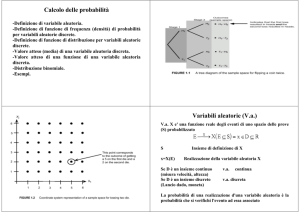
TEST CHI-QUADRATO
Fissato α, l’ipotesi nulla dovrà essere rifiutata se il valore
osservato della statistica χ2 è maggiore del valore critico χ2U
di una distribuzione χ2 con (r-1) gradi di libertà.
Field
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
No. bacteria
19
12
7
11
9
9
7
7
9
13
18
13
10
12
12
Conteggio di No. bacteria
No. bacteria
Totale
4-5
6
6-7
11
8-9
12
10-11
18
12-13
12
14-15
11
16-17
11
18-19
11
20-21
3
22-23
3
24-26
2
Totale complessivo
100
Num. medio di batteri
12.69
X
4
6
8
10
12
14
16
18
20
22
24
26
28
Fr_att_Poiss
0.5
2.6
8.4
16.4
21.8
20.9
15.1
8.5
3.8
1.4
0.4
0.1
0.0
Fr_oss
0
6
11
12
18
12
11
11
11
3
0
3
2
Chi-Sq.Stat. =
DF =
alpha =
Crit. value =
MODELLO PROBABILISTICI
(Att-Oss)^2/Att
0.5
4.3
0.8
1.2
0.7
3.8
1.1
0.8
13.4
1.8
0.4
73.0
122.9
101.728
12
0.05
18.74
36
18
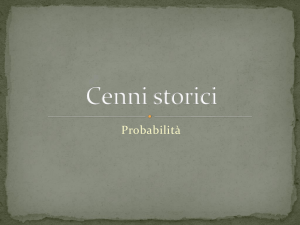
TEST CHI-QUADRATO
Conteggio dei batteri: frequenze osservate vs distribuzione di Poisson
22
20
Fr_oss
Fr_att
18
Frequenza
16
14
12
10
8
6
4
2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
Numero di batteri
Chi-Sq. Stat. = 101.728
DF =
12
alpha =
0.05
Crit. value =
18.74
37
MODELLO PROBABILISTICI
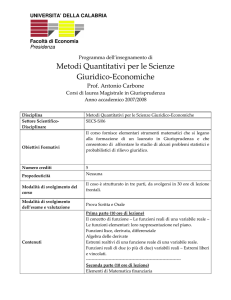
TEST CHI-QUADRATO
Conteggio dei batteri: frequenze osservate vs distribuzione binomiale negativa
22
20
Fr_oss
Fr_att
18
Frequenza
16
14
12
10
8
6
4
2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
Numero di batteri
Chi-Sq. Stat. =
DF =
alpha =
Crit. value =
14.5
12
0.05
18.74
MODELLO PROBABILISTICI
38
19
TEST DI ANDERSON-DARLING
La statistica di Anderson-Darling (A2) misura l'area il modello
previsto (in base alla distribuzione scelta) e la funzione di
ripartizione empirica. Più precisamente, la statistica
Anderson-Darling è una distanza al quadrato che avrà un
peso maggiore nelle code della distribuzione.
Valori bassi della statistica Anderson-Darling indicano che la
distribuzione ipotizzata si adatta bene i dati.
La statistica A2 può essere applicata sia a modelli discreti sia
continui, ma tradizionalmente viene applicata a variabili
continue.
La statistica test Anderson-Darling A2 è definita come
A2 = – n – S, dove
S=∑ni=1((2*i – 1)/n)*[ln(F(Y(i)) + ln(1 – F(Y(N+1-i))]
F è la funzione di distribuzione cumulativa della distribuzione
specificata
39
MODELLO PROBABILISTICI
TEST DI ANDERSON-DARLING
Summary for Counts
Anderson-Darling Normality Test
A-Squared
P-Value <
Mean
StDev
Variance
Skewness
Kurtosis
N
0
750000
1500000
2250000
Minimum
1st Quartile
Median
3rd Quartile
Maximum
3000000
5.08
0.005
731462
719651
5.17897E+11
1.99001
4.14066
80
26303
270721
519110
971676
3467369
Probability Plot of Counts
95% Confidence Interval for Mean
9 5 % C onfidence Inter vals
571312
Mean
Normal - 95% CI
891612
95% Confidence Interval for Median
369663
Median
300000
400000
500000
600000
700000
800000
900000
99.9
99
95% Confidence Interval for StDev
622824
852407
95
90
Lognormal - 95% CI
Loc
Scale
N
AD
P-Value
99
95
Percent
90
80
70
60
50
40
30
20
13.05
1.037
80
0.518
0.183
Percent
Probability Plot of Counts
99.9
Mean
731462
StDev
719651
N
80
AD
5.081
P-Value <0.005
640945
80
70
60
50
40
30
20
10
5
1
0.1
-2000000
-1000000
0
1000000
2000000
3000000
4000000
Counts
10
5
1
0.1
10000
100000
1000000
Counts
10000000
MODELLO PROBABILISTICI
40
20
TEST DI ANDERSON-DARLING
Summary for Peso
Anderson-Darling Normality Test
A-Squared
P-Value <
0.96
0.98
1.00
1.02
1.04
1.06
1.08
1.77
0.005
Mean
StDev
Variance
Skewness
Kurtosis
N
0.98302
0.02868
0.00082
1.61433
3.20499
50
Minimum
1st Quartile
Median
3rd Quartile
Maximum
0.94500
0.96275
0.97700
0.99425
1.08500
Probability Plot of Peso
Lognormal - 95% CI
99
Loc
-0.01753
Scale
0.02857
N
50
AD
1.592
P-Value
<0.005
95% Confidence Interval for Mean
9 5 % C onfidence Inter vals
0.97487
Mean
90
95% Confidence Interval for Median
0.970
0.975
0.980
0.985
0.98500
95% Confidence Interval for StDev
0.990
0 02396
0 03574
Probability Plot of Peso
Normal - 95% CI
80
Percent
0.96867
Median
70
60
50
40
30
20
99
Mean
0.9830
StDev
0.02868
N
50
AD
1.768
P-Value <0.005
95
90
80
Percent
95
0.99117
10
5
1
0.90
70
0.95
1.00
Peso
1.05
1.10
60
50
40
30
20
10
5
1
0.90
0.95
1.00
Peso
1.05
1.10
MODELLO PROBABILISTICI
41
21