Renato Orta
Teoria delle Linee di Trasmissione
Marzo 1999
Presentazione
Queste dispense di Teoria delle Linee di Trasmissione coprono ampiamente il programma,
relativo a questo argomento, del corso di Campi Elettromagnetici tenuto al Politecnico di
Torino dall'autore. Alla redazione hanno collaborato Vito Lancellotti, Angelo Mauriello
e Fabio Piccione.
III
Indice
1 Linee di trasmissione senza perdite
1.1
1.2
1.3
1.4
1.5
1.6
1.7
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Richiami di elettromagnetismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modello circuitale di linea di trasmissione . . . . . . . . . . . . . . . . . . . . . . . . .
Equazioni d'onda e loro soluzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Equazioni delle linee nel dominio della frequenza . . . . . . . . . . . . . . . . . . .
Propagazione dello stato elettrico e interpretazioni geometriche . . . . . . .
Soluzione delle equazioni delle linee con la tecnica matriciale . . . . . . . . .
1
1
2
4
8
12
18
20
2 Esempi di linee di trasmissione
23
3 Circuiti contenenti linee di trasmissione
35
2.1
2.2
2.3
2.4
2.5
2.6
2.7
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cavo coassiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linea bilare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Filo su piano metallico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linea bilare schermata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linea a striscia (stripline) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Microstriscia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1
3.2
3.3
3.4
3.5
3.6
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Denizione di impedenza locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Coecienti di riessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Considerazioni energetiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagrammi di tensione, corrente e impedenza sulla linea . . . . . . . . . . . . .
Componenti reattivi a parametri distribuiti . . . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Induttori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.2 Condensatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.3 Risonatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7 La Carta di Smith . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8 Analisi di semplici circuiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
V
23
23
25
26
27
28
29
35
35
42
45
46
50
51
52
53
56
60
Indice
VI
4 Fenomeni dissipativi nelle linee di trasmissione
65
5 Linee di trasmissione con perdite
79
4.1 Perdite nel dielettrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Perdite nei conduttori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Parametri di perdita di alcune linee di trasmissione . . . . . . . . . . . . . . . . .
4.3.1 Cavo coassiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Linea bilare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Soluzione delle equazioni delle linee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Calcolo del usso di potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Espressioni approssimate di costante di propagazione e impedenza caratteristica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
66
73
73
75
79
87
89
6 Circuiti di adattamento
93
7 La matrice Scattering
109
8 Linee di trasmissione nel dominio del tempo
131
6.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.2 Tipi di adattamento di impedenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.3 Adattatori di impedenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.3.1 Celle a L con elementi reattivi concentrati . . . . . . . . . . . . . . . . . . 97
6.3.2 Adattatori a stub singoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.3.3 Adattatore a (doppio stub) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.3.4 Adattatori a =4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Relazione tra le matrici [S ] e [Z ] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Calcolo della potenza dissipata da un dispositivo . . . . . . . . . . . . . . . . . . .
7.3.1 Proprieta della matrice scattering [S ] di un dispositivo . . . . . . . .
7.4 Cambiamento delle impedenze di riferimento . . . . . . . . . . . . . . . . . . . . . .
7.5 Spostamento dei piani di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.6 Connessione di strutture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7 Matrice scattering di alcuni dispositivi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7.1 Attenuatore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7.2 Isolatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7.3 Circolatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7.4 Accoppiatore direzionale ideale . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.8 Esempi di analisi di strutture descritte da matrici S . . . . . . . . . . . . . . . .
7.8.1 Connessione in cascata di un doppio bipolo e di un carico . . . . .
7.8.2 Interconnessione di due doppi bipoli tramite un tratto di linea .
7.8.3 Cambiamento di impedenza di riferimento . . . . . . . . . . . . . . . . . .
7.9 Matrice di trasmissione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1
8.2
8.3
8.4
8.5
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
La velocita di gruppo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Distorsioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comunicazioni ottiche digitali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Linee di trasmissione ideali disadattate . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.5.1 Soluzione generale delle equazioni delle linee . . . . . . . . . . . . . . . .
109
112
113
114
114
116
117
121
121
121
121
122
124
124
125
127
128
131
133
136
140
141
141
Indice
8.5.2
8.5.3
VII
La linea disadattata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Interconnessioni reali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
VIII
Capitolo 1
Linee di trasmissione senza perdite
1.1 Introduzione
Una linea di trasmissione e, nell'accezione piu generale, un sistema di conduttori metallici
e mezzi dielettrici in grado di \guidare" il trasferimento di energia da un generatore a
un utilizzatore, indipendentemente (almeno con ottima approssimazione) dalle curve che
la linea stessa deve eettuare per esigenze pratiche di installazione. Da questo punto di
vista, su una linea di trasmissione ha luogo un fenomeno propagativo unidimensionale.
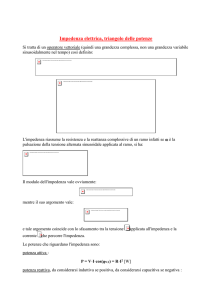
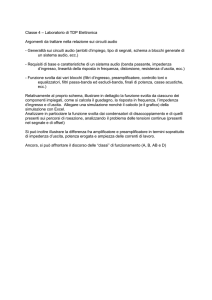
Esistono molti tipi diversi di linee di trasmissione, alcuni esempi dei quali sono riportati in Fig. 1.1. I vari tipi di linea vengono utilizzati a frequenze diverse e per applicazioni
molto dierenziate. La stripline e la microstriscia sono utilizzate solo all'interno di apparati in tratti che non superano mai qualche centimetro. Cavi coassiali e bre ottiche,
invece, possono essere impiegati come supporto sico per le comunicazioni intercontinentali, e quindi vi sono esempi di tratte di migliaia di chilometri. In questo primo corso di
n3
n2
n1
b
a
c
d
e
Esempi di linee di trasmissione: (a) cavo coassiale,
(b) linea bilare, (c) bra ottica, (d) microstriscia , (e) stripline.
Figura 1.1
Campi Elettromagnetici ci occuperemo, per motivi didattici, esclusivamente delle strutture costituite da almeno due conduttori metallici, come il cavo coassiale, la linea bilare,
la stripline e la microstriscia, nonche delle linee accoppiate realizzate con le strutture ora
citate. Queste si possono denire linee di trasmissione in senso stretto. Le altre strutture
1
2
1 { Linee di trasmissione senza perdite
illustrate in Fig. 1.1 sono denite piu propriamente guide d'onda metalliche o dielettriche
e verranno discusse nel corso di Campi Elettromagnetici II. (In termini piu precisi, tutte
le strutture di Fig. 1.1 sono guide d'onda, ma quelle della prima classe si dierenziano in
quanto il loro modo di propagazione fondamentale e TEM - o quasi TEM nel caso della
microstriscia - essendo esse costituite da due conduttori).
1.2 Richiami di elettromagnetismo
Il fenomeno sico che ha luogo in una linea di trasmissione e di tipo elettromagnetico e
quindi e completamente descritto, da un punto di vista quantitativo, dalle equazioni di
Maxwell. Il campo elettromagnetico e descritto da quattro campi vettoriali: il campo
elettrico E (r;t), il campo magnetico H(r;t), lo spostamento elettrico D(r;t) e l'induzione
magnetica B(r;t). Le equazioni di Maxwell specicano il legame tra questi campi e le
sorgenti, descritte tramite la densita di corrente J (r;t) . Queste equazioni, gia ricavate
e discusse nel corso di Fisica II, formano la base matematica dell'elettromagnetismo
classico, e si scrivono nella forma (unita MKSA)
r E (r;t) = ; @t@ B(r;t)
(1.1)
@
r H(r;t) = @t D(r;t) + J c(r;t) + J (r;t)
Ricordiamo il signicato dei simboli e le relative unita di misura.
E (r;t)
H(r;t)
D(r;t)
B(r;t)
J (r;t)
J c(r;t)
campo elettrico
[V/m]
campo magnetico
[A/m]
spostamento elettrico [C/m2]
induzione magnetica
[Wb/m2]
densita di corrente
[A/m2]
(sorgente)
densita di corrente
[A/m2]
(di conduzione)
A queste equazioni devono essere associate le relazioni costitutive, che descrivono il
legame tra i campi e le induzioni. Il caso piu semplice e quello del vuoto in cui esse sono
B(r;t) = 0 H(r;t)
(1.2)
D(r;t) = 0 E (r;t)
dove 0 , permettivita dielettrica, e 0, permeabilita magnetica, hanno i valori
0 361 10;9 F=m
(1.3)
x1.2 { Richiami di elettromagnetismo
3
0 = 4 10;7 H=m:
(1.4)
Si dimostra che per un'onda (piana) la velocita di propagazione nel vuoto e legata alle
precedenti grandezze da
(1.5)
c = p1 = 2: 998 108 m=s:
0 0
Inoltre il rapporto tra i moduli del campo elettrico e di quello magnetico e detto impedenza d'onda o impedenza intrinseca del vuoto e vale
s
(1.6)
Z0 = 0 377 0
Nel caso di dielettrici lineari, isotropi e non dispersivi le relazioni costitutive (1.2) sono
sostituite da
B(r;t) = H(r;t)
(1.7)
D(r;t) = E (r;t)
dove
= 0r
(1.8)
= 0 r
(1.9)
e r , r (numeri puri) sono le permeabilita e permittivita relative del materiale. Tutti i
materiali non ferromagnetici hanno valori di r che dieriscono molto poco dall'unita.
Qualora il dielettrico contenga cariche libere, la presenza di un campo elettrico E (r;t)
determina la presenza di una corrente di conduzione J c(r;t):
J c(r;t) = E (r;t)
(1.10)
dove e la conducibilita del dielettrico misurata in S/m.
Dalla Fisica si sa che il campo elettromagnetico, prodotto da una generica sorgente,
si propaga da un punto all'altro dello spazio sotto forma di onde con una velocita che,
nel vuoto, vale c = 2: 998 108 m/s. Anche se la dipendenza temporale del campo
elettromagnetico puo essere qualsiasi, e molto importante, sia da un punto di vista teorico
che applicativo, il cosiddetto regime armonico (o sinusoidale) con frequenza f . In queste
condizioni, le onde elettromagnetiche sono caratterizzate dalla \lunghezza d'onda" 0 =
c=f , che e una sorta di dimensione caratteristica della struttura spaziale del campo, in
quanto ne specica il tasso di variazione. E noto dai corsi di Matematica che un campo
con dipendenza temporale arbitraria puo essere rappresentato come sovrapposizione di
campi sinusoidali con frequenze contenute in una opportuna banda (teorema di Fourier).
In tal caso con 0 e da intendersi la lunghezza d'onda minima, cioe quella corrispondente
alla frequenza massima.
La dimensione L delle strutture con cui il campo elettromagnetico interagisce devono
sempre essere confrontate con la lunghezza d'onda. Il rapporto L=0 si denisce lunghezza
elettrica della struttura ed e un numero puro. A seconda del valore di L=0 si distinguono
sostanzialmente tre regimi diversi:
. il regime quasi-statico, con L=0 1, tipico dei circuiti a parametri concentrati,
studiati in Elettrotecnica
4
1 { Linee di trasmissione senza perdite
. il regime delle risonanze, con L=0 1, tipico dei circuiti a parametri distribuiti,
oggetto di questo corso
. il regime ottico, con L=0 1, tipico degli usuali componenti studiati dall'ottica
classica (lenti, specchi, ecc...)
La tecnica di soluzione dei problemi elettromagnetici o addirittura la loro modellizzazione e diversa a seconda del regime in cui si opera.
La teoria dei circuiti a parametri concentrati studia la dinamica di sistemi costituiti da
elementi di dimensioni trascurabili rispetto alla lunghezza d'onda. Il modello impiegato
adotta come variabili di stato la dierenza di potenziale vrs(t) tra i due nodi Pr e Ps di una
rete e la corrente elettrica irs(t) che uisce nel conduttore compreso tra gli stessi nodi. A
rigore, queste grandezze sono denite in maniera univoca solo nel caso stazionario (stato
indipendente dal tempo) ma sono comunemente impiegate anche nel campo di frequenze
per cui la rete e molto piccola rispetto alla lunghezza d'onda. A questo criterio puo essere
data veste diversa; infatti
L = L =L1 = 0 c=f c T T
dove T e il periodo di un'oscillazione di frequenza f = 1=T e e il tempo impiegato
da un'onda elettromagnetica ad attraversare la rete da un'estremita all'altra. Quindi un
sistema elettromagnetico puo essere descritto in termini di tensioni e correnti nche il
ritardo di propagazione e trascurabile rispetto al periodo delle oscillazioni. Questo e il
motivo per cui si parla di regime quasi-stazionario.
Consideriamo ora una delle linee di trasmissione illustrate in Fig. 1.1. Tipicamente
si tratta di strutture con dimensioni trasversali piccole rispetto alla lunghezza d'onda,
ma con lunghezza che puo essere molto grande. Allora, mentre una rete a parametri
concentrati viene modellizzata come puntiforme, una linea di trasmissione e un sistema
unidimensionale in cui tensione e corrente dipendono, oltre che dal tempo, da una coordinata spaziale che descrive la posizione sulla linea, usualmente z. Le variabili di stato
di tale sistema sono quindi v(z;t) e i(z;t).
Un circuito che contiene linee di trasmissione si dice spesso \circuito a parametri
distribuiti" per sottolineare il fatto che l'energia elettromagnetica e immagazzinata non
solo in componenti specici (induttori, condensatori) ma anche nello spazio che circonda
i conduttori di una linea, che risulta quindi possedere una induttanza e una capacita per
unita di lunghezza.
Le equazioni che regolano la dinamica di una linea di trasmissione si potrebbero ricavare direttamente dalle equazioni di Maxwell, ma da un punto di vista didattico risulta preferibile generalizzare i concetti appresi nel corso di elettrotecnica e procedere
esclusivamente in termini circuitali.
1.3 Modello circuitale di linea di trasmissione
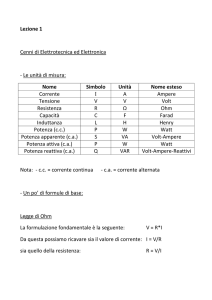
Consideriamo un tratto di linea di trasmissione a due conduttori uniforme, cioe con
sezione trasversale indipendente dalla coordinata longitudinale z. In Fig. 1.2a e rappresentato, come esempio, un tratto di cavo coassiale. In Fig. 1.2b e riportato il suo simbolo,
ossia una rappresentazione schematica e convenzionale contenente due \conduttori" in
cui uisce una corrente e tra i quali esiste una dierenza di potenziale. E quindi evidente
x1.3 { Modello circuitale di linea di trasmissione
(a)
5
(b)
(a) Tratto di cavo coassiale e (b)
rappresentazione simbolica del precedente.
Figura 1.2
che tutte le linee a due conduttori hanno lo stesso simbolo circuitale di Fig. 1.2b. Come
si e detto, una linea di trasmissione puo avere lunghezza anche grande rispetto alla lunghezza d'onda, quindi il suo funzionamento non puo essere analizzato con le equazioni di
Kirchho, che presuppongono che il circuito sia di dimensioni insignicanti rispetto a .
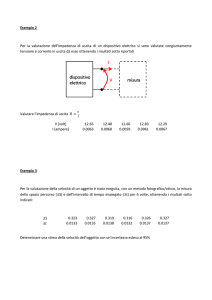
Consideriamo allora un tratto di linea di lunghezza z (Fig. 1.3a) al quale quindi
possiamo applicare le equazioni di Kirchho. Facendo poi tendere a zero la lunghezza z,
le equazioni del sistema assumono la forma di equazioni dierenziali a derivate parziali.
Per ricavare il circuito equivalente del tratto elementare di linea, osserviamo che nei
∆z
i(z,t)
/∆z
5∆z
&∆z
v(z,t)
(a)
i(z+∆z,t)
*∆z
v(z+∆z,t)
(b)
a) Tratto z di linea di trasmissione (cavo coassiale).E
indicata la supercie usata per denire L. b) Circuito equivalente
Figura 1.3
conduttori uisce una corrente che genera un campo magnetico con linee di forza che
circondano i conduttori. Tale campo da luogo a un usso di induzione autoconcatenato
attraverso una supercie appoggiata ai conduttori stessi. Il coeciente di proporzionalita
tra corrente e usso e, per denizione, l'induttanza del tratto di linea, che scriveremo
Lz per mettere in evidenza la dipendenza lineare del usso dalla lunghezza z. Quindi
L, misurata in [H/m] e l'induttanza per unita di lunghezza della linea.
Analogamente, i conduttori metallici danno luogo a perdite ohmiche dovute alla loro
limitata conducibilita e quindi il circuito equivalente del tratto di linea comprende una
resistenza serie di valore Rz dove R e la resistenza per unita di lunghezza della linea,
misurata in [
=m].
Ancora, i due conduttori aacciati costituiscono un condensatore con capacita C z,
essendo C la capacita per unita di lunghezza della linea, misurata in [F/m].
6
1 { Linee di trasmissione senza perdite
Inne, il dielettrico che separa i conduttori ha una conducibilita non nulla, responsabile
della potenza qui dissipata per eetto Joule. Da un punto di vista circuitale questo
fenomeno e tenuto in conto tramite la conduttanza totale G z, dove G e una conduttanza
per unita di lunghezza, misurata in S/m.
Applichiamo le leggi di Kirchho al circuito di Fig. 1.3b e troviamo
8
@
>
>
< v(z;t) ; v(z + z;t) = R z i(z;t) + L z @t i(z;t)
(1.11)
>
>
@
: i(z;t) ; i(z + z;t) = G z v(z + z;t) + C z v(z + z;t)
@t
Dividiamo ambo i membri per z e prendiamo il limite di ambo i membri per z ! 0.
I rapporti incrementali al primo membro diventano delle derivate parziali rispetto a z e,
tenendo in conto la continuita di v(z;t), otteniamo le equazioni delle linee di trasmissione
(o dei telegrasti):
8 @
@ i(z;t)
>
;
v
(
z;t
)
=
R
i
(
z;t
)
+
L
>
< @z
@t
(1.12)
>
>
@
@
: ; i(z;t) = G v(z;t) + C v(z;t)
@z
@t
E da osservare che qualunque altra disposizione circuitale degli elementi, come ad esempio quelle di Fig. 1.4, porta esattamente alle stesse equazioni dierenziali. Le eq. (1.12)
Circuiti equivalenti alternativi di
un tratto elementare di linea di trasmissione.
Figura 1.4
Rg
+
e(t)
RL
0
L
Schema di circuito comprendente generatore, linea di trasmissione e
carico.
Figura 1.5
sono equazioni dierenziali a derivate parziali del primo ordine accoppiate e, come discusso nei corsi di Matematica, devono essere completate da opportune condizioni al
x1.3 { Modello circuitale di linea di trasmissione
7
contorno e condizioni iniziali. Usualmente, una linea di trasmissione collega un generatore a un carico, come schematizzato in Fig. 1.5, dove si e supposto per semplicita che
sia l'impedenza interna del generatore sia l'impedenza di carico siano reali. Questo e il
piu semplice circuito che comprenda un tratto di linea di trasmissione. E chiaro allora
quali condizioni al contorno si debbano associare alla (1.12):
In z = 0 e(t) ; Rg i(0;t) = v(0;t) 8t 0
(1.13)
In z = L
v(L;t) = RLi(L;t) 8t 0
dove e(t) e una funzione causale assegnata. Inoltre la condizione iniziale, che specica lo
stato iniziale dei componenti reattivi (e quindi solo della linea, in questo caso) e
v(z;0) = v0(z) 0 z L
(1.14)
i(z;0) = i0(z) 0 z L
dove v0(z) e i0 (z) sono funzioni (reali) assegnate. Tipicamente, a t = 0 la linea e \scarica"
e quindi
v0(z) 0 e i0 (z) 0 0 z L
(1.15)
Osserviamo ancora che le (1.12) sono un sistema di equazioni omogeneo, cioe privo di
termine forzante; delle condizioni al contorno (1.13) la prima e non omogenea, la seconda
omogenea. Possiamo quindi dire che, nel caso di linea inizialmente scarica, il sistema e
eccitato tramite la condizione al contorno in z = 0.
Nel caso in cui la rete di carico comprenda elementi reattivi, la condizione al contorno
e costituita da una equazione dierenziale del tipo
D( ddt ) v(L;t) = N ( ddt ) i(L;t)
(1.16)
da completarsi con le opportune condizioni iniziali relative ai componenti reattivi presenti
nella rete di carico. D e N sono due polinomi formali nell'operatore d=dt. Per esempio,
se la rete di carico e quella di Fig. 1.6, l'equazione 1.16 assume la forma:
d v(L;t) = R d i(L;t) + L d2 i(L;t) + 1 i(L;t)
(1.17)
dt
dt
dt2
C
a cui sono da associare le condizioni iniziali vc (0) e i(0), che esprimono la tensione ai capi
del condensatore e la corrente che uisce nell'induttanza al tempo t = 0.
In realta, non sempre una linea di trasmissione e eccitata solo alle sue estremita. Nei
problemi di compatibilita elettromagnetica, si studia l'eetto di un'onda che investe una
linea di trasmissione: il fenomeno puo essere modellizzato con un insieme di generatori di
tensione e di corrente \distribuiti" lungo la linea stessa con densita per unita di lunghezza
v (z;t) e i (z;t). In tal caso il circuito equivalente del tratto di linea ha la forma riportata
in Fig. 1.7 e corrispondentemente le (1.12) diventano
8 @
@ i(z;t)+ v (z;t)
>
v
(
z;t
)
=
R
i
(
z;t
)
+
L
;
>
< @z
@t
(1.18)
>
>
@
@
: ; i(z;t) = G v(z;t) + C v(z;t)+ i (z;t)
@z
@t
8
1 { Linee di trasmissione senza perdite
i(L,t)
R
v(L,t)
L
C
vC(L,t)
Rete di carico comprendente componenti reattivi, costituita
da una resistenza R, una induttanza L e una capacita C connesse in serie.
Figura 1.6
Le funzioni v (z;t) e i (z;t) descrivono un termine di sorgente e sono quindi da considerarsi
o
/∆z
5∆z
]
v
+
o
i
]
&∆z
*∆z
Circuito equivalente di un tratto z di linea
di trasmissione comprendente generatori distribuiti.
Figura 1.7
note. Le (1.18), dato che contengono un termine forzante, deniscono un problema non
omogeneo.
E noto dall'analisi matematica che la soluzione generale di un'equazione lineare non
omogenea e data dalla somma di una soluzione particolare dell'equazione non omogenea
in questione e della soluzione generale dell'equazione omogenea associata. Noi sseremo l'attenzione innanzitutto sull'equazione omogenea associata e vedremo che la sua
soluzione generale e la combinazione lineare di due modi propri del sistema chiamati
onda progressiva e onda regressiva. Altri nomi consueti sono soluzioni libere, evoluzioni
proprie, soluzioni risonanti.
1.4 Equazioni d'onda e loro soluzione
Una linea di trasmissione si dice ideale quando le perdite ohmiche nei conduttori e nel
dielettrico si possono ritenere trascurabili. Le equazioni delle linee, in assenza di sorgenti,
diventano in tal caso
8 @v
@i = 0
>
+
L
>
< @z
@t
(1.19)
>
>
@i
@v
: +C = 0
@z
@t
x1.4 { Equazioni d'onda e loro soluzione
9
Da questo sistema di equazioni dierenziali del primo ordine si puo ricavare un'equazione
del secondo ordine per la sola tensione v(z;t). Deriviamo la prima equazione rispetto a
z e la seconda rispetto al tempo:
8 2
>
@ v + L @2i = 0
>
>
< @z2
@z @t
(1.20)
>
2
2
>
>
: @ i + C @ v2 = 0
@t @z
@t
Le due derivate seconde miste sono uguali se i(z;t) e una funzione abbastanza regolare e
dalle precedenti ricaviamo
@ 2 v ; LC @ 2 v = 0
(1.21)
@z2
@t2
Questa equazione e conosciuta come equazione delle onde (in unapdimensione) perche
le sue soluzioni sono onde che si propagano con velocita vf = 1= LC . Naturalmente
alla (1.21) deve essere associata una delle due eq. (1.19 ), per ricavare la corrente i(z;t).
Ricordiamo infatti che tensione e corrente sulla linea sono inscindibilmente legate.
Si osservi che anche la corrente i(z;t) soddisfa un'equazione d'onda identica alla (1.21).
Per ottenerla basta derivare la prima delle (1.19) rispetto al tempo e la seconda rispetta
allo spazio.
L'equazione delle onde per una linea innitamente lunga, con le condizioni iniziali
v(z;0) = v0 (z);
i(z;0) = i0(z)
(1.22)
si puo risolvere con un cambiamento di variabile (D'Alembert). Deniamo le due nuove
variabili indipendenti
= z ; vf t;
= z + vf t
(1.23)
in termini delle quali le variabili originarie si esprimono
z = 21 ( + );
t = 21v ( ; ):
(1.24)
f
Esprimiamo ora l'equazione d'onda nelle nuove variabili usando la regola di derivazione
delle funzioni composte
@v = @v @ + @v @ = @v + @v
(1.25)
@z @ @z @ @z @ @
!
@v = @v @ + @v @ = ;v @v ; @v
(1.26)
f
@t @ @t @ @t
@ @
e ancora
!
!
@ 2 v = @ @v + @v + @ @v + @v = @ 2 v + 2 @ 2 v + @ 2 v
(1.27)
@z2 @ @ @ @ @ @
@ 2 @@ @2
"
!
!
! #
@ 2 v = v @ @v ; @v v ; @ @v ; @v v = v2 @ 2 v ; 2 @ 2 v + @ 2 v (1.28)
f @ 2
@t2 f @ @ @ f @ @ @ f
@@ @ 2
10
1 { Linee di trasmissione senza perdite
Utilizzando queste due ultime espressioni, l'equazione delle onde diventa
@2v = 0
@@
ossia
!
@ @v = 0
@ @
(1.29)
(1.30)
la cui soluzione e
@v = f ( )
(1.31)
@
dove f e una funzione arbitraria che non dipende da . Integrando la precedente, segue
Z
v(;) = f ( )d + f2 ()
(1.32)
dove f2 e una funzione arbitraria di . Riscriviamo la precedente
v(;) = f1 ( ) + f2 ()
(1.33)
che e la soluzione generale dell'equazione delle onde. Abbiamo introdotto il simbolo f1 ( )
per indicare l'integrale della funzione arbitraria f ( ). Ritorniamo alle variabili originarie
v(z;t) = v+(z ; vf t) + v;(z + vf t)
(1.34)
dove si sono introdotti i simboli piu appropriati v+ e v; per indicare le due funzioni
arbitrarie f1 e f2.
Per ricavare la corrente riprendiamo le (1.19) da cui
@i = ;L @v
(1.35)
@t
@z
ossia
Z @
v(z;t)dt:
(1.36)
i(z;t) = ; L1 @z
Dalla (1.34) si calcola
e
@v = v+0(z ; v t) + v;0(z + v t)
f
f
@z
Z
Z
1
+
0
;0
i(z;t) = ; L v (z ; vf t)dt + v (z + vf t)dt
( Z
)
Z
1
1
1
+
0
;0
= ; L ; v v ( )d + v v ()d
f
f
+
;
= Y1fv (z ; vf t) ; v (z + vf t)g
q
(1.37)
(1.38)
dove la quantita Y1 = C =L e detta ammettenza caratteristica della linea e si misura
in siemens [S].
x1.4 { Equazioni d'onda e loro soluzione
La soluzione generale delle equazioni delle linee si puo dunque scrivere
v(z;t) = v+(z ; vf t) + v;(z + vf t)
i(z;t) = Y1v+(z ; vf t) ; Y1v;(z + vf t):
11
(1.39)
Per completare la soluzione del problema al valore iniziale, dobbiamo ora determinare le
funzioni v() in modo che le condizioni (1.22) siano soddisfatte. Ora, le (1.39), scritte
per t = 0, danno
v0 (z) = v+(z) + v;(z)
(1.40)
i0 (z) = Y1v+(z) ; Y1v;(z):
Risolvendo per somma e dierenza si trova
v+(z) = 21 [v0 (z) + Z1i0 (z)];
(1.41)
v;(z) = 21 [v0 (z) ; Z1i0 (z)]:
(1.42)
In questo modo le funzioni v+ e v; sono determinate. La soluzione per t > 0 si ottiene
sostituendo l'argomento z con z ; vf t in v+ e z + vf t in v;, come risulta da (1.39):
v(z;t) = 21 [v0 (z ; vf t) + Z1i0(z ; vf t)] + 12 [v0 (z + vf t) ; Z1i0 (z + vf t)] ; (1.43)
i(z;t) = Y21 [v0 (z ; vf t) + Z1i0 (z ; vf t)] + Y21 [v0(z + vf t) ; Z1i0 (z + vf t)] : (1.44)
Alternativamente queste equazioni si possono riscrivere
(1.45)
v(z;t) = 12 [v0 (z ; vf t) + v0 (z + vf t)] + Z21 [i0(z ; vf t) ; i0 (z + vf t)] ;
(1.46)
i(z;t) = Y21 [v0 (z ; vf t) + v0 (z + vf t)] + 12 [i0 (z ; vf t) ; i0 (z + vf t)] :
Si verica immediatamente che queste funzioni soddisfano le condizioni iniziali.
Ricordiamo che la soluzione generale di un'equazione dierenziale alle derivate ordinarie contiene delle costanti arbitrarie mentre un'equazione dierenziale alle derivate
parziali contiene delle funzioni arbitrarie. L'arbitrarieta viene rimossa quando si costruisce una soluzione particolare che soddisfa le condizioni al contorno. Si noti che lo stato
elettrico sulla linea dipende da z e t solo attraverso le combinazioni t ; z=vf e t + z=vf :
questo e l'unico vincolo imposto dall'equazione d'onda.
Per la soluzione dell'equazione d'onda e possibile seguire anche un altro approccio
basato sull'uso delle trasformate di Fourier. Esso e l'unico applicabile quando si tenga
conto anche dei meccanismi di perdita sulla linea.
12
1 { Linee di trasmissione senza perdite
1.5 Equazioni delle linee nel dominio della frequenza
E noto dalla Matematica che di ogni funzione del tempo f (t) a modulo integrabile, cioe
con
Z1
j f (t) j dt < 1
(1.47)
;1
esiste la rappresentazione spettrale
Z1
f (t) = 21
F (!) ej!t d!
(1.48)
;1
dove F (!) e la trasformata di Fourier, o spettro, di f (t), denita da
Z1
F (!) =
f (t) e;j!t dt = Fff (t)g
(1.49)
;1
Una proprieta molto utile della trasformata di Fourier e la seguente:
( )
(1.50)
F ddft = j! Fff (t)g = j! F (!)
In altre parole, all'operatore di derivazione nel dominio naturale t corrisponde, nel
dominio spettrale !, l'operazione algebrica di moltiplicazione per j!.
Anche se la trasformata di Fourier e denita per una funzione complessa del tempo,
purche soddis la (1.47), le grandezze siche quali la tensione e la corrente sono funzioni
reali. Questo implica che valga la relazione:
F (;!) = F (!)
(1.51)
ossia lo spettro di una funzione reale e una funzione complessa hermitiana; la parte
di spettro che corrisponde alle frequenze negative non aggiunge informazione a quella
associata alle frequenze positive.
Nelle applicazioni, molto spesso si ha a che fare con segnali sinusoidali (o armonici),
cioe del tipo
f (t) = F0 cos(!0 t + )
(1.52)
Calcoliamo lo spettro di questo segnale tramite la (1.49); applicando la formula di Eulero
troviamo
Z1
F (!) =
F0 cos(!0t + ) e;j!t dt =
;1
Z
Z
F
F
0 1 j (! t+) ;j!t
0 1 ;j (! t+) ;j!t
= 2
e
e dt + 2
e
e dt =
;1
;1
= F0 ej(! ; !0) + F0 e;j(! + !0 )
(1.53)
Questo spettro e costituito da due \righe" (funzioni di Dirac) alle frequenze !0 , per
cui il segnale 1.52 e anche detto monocromatico.
Detto questo, procediamo ora in direzione opposta e ricaviamo il segnale nel dominio
del tempo a partire dal suo spettro (1.53) tramite la formula di antitrasformazione (1.48):
Z
Z1
F
0 j 1
j!t
;
j
j!t
(! + !0 ) e d! =
f (t) = 2 e
(! ; !0) e d! + e
;1
;1
0
0
x1.5 { Equazioni delle linee nel dominio della frequenza
13
F(ω)
-ω0
Figura 1.8
ω0
Spettro di un segnale sinusoidale.
n
o
= F0 ej ej! t + e;j ej! t =
2
n
o
= Re F0 ej ej! t
0
ω
0
0
(1.54)
La grandezza F = F0 exp(j) si usa chiamare fasore del segnale armonico f (t) e coincide,
a meno del fattore , con il coeciente della funzione di Dirac che ha supporto in
! = !0. Inoltre la (1.54) si puo denire come la formula di antitrasformazione per i
fasori.
Osserviamo ancora che, detta P h la corrispondenza biunivoca che associa un segnale
armonico al suo fasore,
F = P hff (t)g
(1.55)
vale la proprieta
( )
P h df
(1.56)
dt = j!0F
Questa equazione e formalmente identica alla 1.50; si noti per altro che ! indica una
frequenza generica, mentre !0 e la frequenza del segnale armonico che si sta considerando.
A causa del legame strettissimo tra fasori e trasformate di Fourier possiamo dire che
ogni equazione nel dominio ! si puo interpretare sia come un'equazione tra trasformate,
sia come un'equazione tra fasori e questo giustica anche l'uso dello stesso simbolo F per
indicare i due concetti.
E bene tuttavia ricordare che fasore e trasformata di Fourier hanno dimensioni siche
diverse:
. il fasore ha le dimensioni della corrispondente grandezza istantanea
. la trasformata e una densita spettrale.
Ad esempio il fasore di una tensione si misura in [V], mentre la sua trasformata si misura
in [V/Hz]. Questo e ovvio se si considera la 1.53 e si nota che la ben nota proprieta
Z1
implica che
(!) d! = 1
;1
(!) abbia dimensioni [Hz;1 ].
(1.57)
14
1 { Linee di trasmissione senza perdite
Riprendiamo le equazioni delle linee nel caso ideale, cioe senza perdite, che qui riscriviamo per comodita:
8 @v
@i = 0
>
+
L
>
< @z
@t
(1.58)
>
>
@v
@i
: +C = 0
@z
@t
ed eettuiamo la trasformata di Fourier di ambo i membri delle due equazioni, osservando
che z e da considerarsi un parametro in tale operazione:
8 d
>
>
< ; dz V (z;!) = j! L I (z;!)
(1.59)
> d
>
: ; I (z;!) = j! C V (z;!)
dz
dove V (z;!) = Ffv(z;t)g e I (z;!) = Ffi(z;t)g sono le trasformate di Fourier di tensione
e corrente. Notiamo che le equazioni delle linee nel dominio spettrale sono diventate
equazioni dierenziali ordinarie. Inoltre le componenti spettrali di tensione e corrente a
frequenze diverse sono disaccoppiate, come e ovvio che sia dato che il sistema e lineare e
invariante per traslazioni temporali (LTI). Procedendo in modo analogo con l'equazione
d'onda (1.21), si ottiene
d2 V (z;!) + k2 V (z;!) = 0
(1.60)
dz2
e
d2 I (z;!) + k2 I (z;!) = 0
(1.61)
dz2
p
dove si e posto k = ! LC con dimensioni dell'inverso di una lunghezza. Questa quantita
e detta costante di propagazione per motivi che saranno evidenti tra poco. Queste due
equazioni sono equazioni dierenziali ordinarie a coecienti costanti (a causa dell'uniformita della linea di trasmissione) e la loro soluzione generale, come noto dalla Matematica, si esprime come combinazione lineare di due soluzioni linearmente indipendenti,
per esempio exp(+jkz) e exp(;jkz). Ossia si puo scrivere
V (z;!) = V0+(!) e;jkz + V0; (!) e+jkz
I (z;!) =
I0+(!) e;jkz + I0;(!) e+jkz
(1.62)
dove V0(!) e I0(!) sono costanti arbitrarie rispetto a z (ma dipendenti da !, naturalmente, che e un parametro). In realta le equazioni delle linee sono un sistema 2 2 del
primo ordine (vedi eq. (1.19)) e quindi
la sua soluzione generale contiene solo due costanti arbitrarie. Allora tra V0 (!) e I0(!) devono sussistere due relazioni, che possiamo
x1.5 { Equazioni delle linee nel dominio della frequenza
15
ottenere ricavando I (z;!) dalla prima delle (1.59) sostituendovi la prima delle (1.62):
!
1
d
V
I (z) = j!L ; dz =
(1.63)
= 1 jkV0+ e;jkz ; jkV0;(!) e+jkz
j!L
Notiamo che
s
p
k = ! LC = C = Y = 1
(1.64)
!L
!L
L 1 Z
1
dove si sono introdotte le grandezze ammettenza e impedenza caratteristica della linea.
L'impedenza caratteristica e indicata col simbolo Z1 poiche, come si vedra nella sezione
5.1, essa coincide con l'impedenza di ingresso di una linea semiinnita. La (1.63) si
riscrive quindi
I (z;!) = Y1V0+(!) e;jkz ; Y1V0;(!) e+jkz
(1.65)
Dal confronto di questa equazione con la seconda delle (1.62), segue
I0+(!) = Y1V0+(!) e I0;(!) = ;Y1V0;(!)
(1.66)
che sono le relazioni cercate. La soluzione generale delle equazioni delle linee nel dominio
spettrale e dunque
V (z;!) = V0+(!) e;jkz + V0;(!) e+jkz
(1.67)
I (z;!) = Y1V0+(!) e;jkz ; Y1V0;(!) e+jkz
Per comprendere a fondo il signicato di queste espressioni occorre antitrasformarle per
ricavare l'andamento di tensione e corrente nel dominio del tempo. Consideriamo innanzitutto il caso piu semplice, in cui sia presente una sola componente spettrale alla pulsazione !0, e quindi i segnali siano monocromatici. Possiamo usare la legge di
antitrasformazione per i fasori
f (t) = RefF ej! t g
(1.68)
per cui si ottiene dalle precedenti:
v(z;t) = v+(z;t) + v;(z;t) =
= j V0+ j cos(!0t ; k0z + arg(V0+)) +
+ j V0; j cos(!0t + k0 z + arg(V0;))
(1.69)
0
i(z;t) = Y1v+(z;t) ; Y1v;(z;t) =
= Y1 j V0+ j cos(!0 t ; k0z + arg(V0+)) +
; Y1 j V0; j cos(!0 t + k0z + arg(V0;))
(1.70)
p
dove k0 = !0 LC . Consideriamo il primo termine dell'espressione di v(z;t). Essa e una
funzione di z e di t, diagrammata in Fig. 1.9 detta onda.
La velocita di propagazione dell'onda (velocita di fase) puo essere denita come la
velocita che deve possedere un osservatore per vedere costante la fase dell'onda stessa. E
16
1 { Linee di trasmissione senza perdite
Rappresentazione tridimensionale di (a) onda progressiva,
(b) regressiva e (c) stazionaria per una linea chiusa in corto circuito.
Figura 1.9
chiaro che il valore della funzione e costante se tale e l'argomento del coseno. Imponendo
che il suo dierenziale sia nullo
d (!0t ; k0z + arg(V0+ )) = !0 dt ; k0 dz = 0
(1.71)
troviamo la condizione che deve essere soddisfatta:
dz = !0 = p
!0 = p1 = v
(1.72)
dt k0 !0 LC
LC f
Diciamo allora che il primo termine della (1.69)
p rappresenta un'onda progressiva poiche
si muove con velocita di fase positiva pari a 1= LC . Notiamo che anche il primo termine
dell'espressione della corrente descrive un'onda progressiva: in particolare la corrente e
proporzionale alla tensione tramite l'ammettenza caratteristica.
Consideriamo ora i graci di Fig. 1.10. Il primo (a) riporta l'evoluzione della tensione
progressiva in una sezione specica della linea z = z0 in funzione del tempo. Il secondo
(b) riporta la distribuzione della tensione progressiva sulla linea in un istante specico
t = t0 . Le due curve sono ovviamente periodiche e possiamo denire due periodi:
x1.5 { Equazioni delle linee nel dominio della frequenza
2
v ( z0 , t )
V0+
+
v ( z, t 0 )
1
V0+
0
-1
0
λ
2
T
+
17
1
0
5
10
(a)
15
t
-1
0
5
10
(b)
15
z
(a) Evoluzione temporale della tensione progressiva in una sezione della linea e (b) distribuzione della tensione progressiva su una linea ad un istante di tempo
ssato.
Figura 1.10
. il periodo temporale T = 2=!0 e l'intervallo di tempo durante il quale la fase
dell'onda varia di 2 radianti
. il periodo spaziale o lunghezza d'onda = 2=k0 e la distanza nella quale la fase
dell'onda subisce una variazione di 2 radianti
Da questa denizione e da quella di k0 troviamo subito
(1.73)
f = 2!0 2k = !k 0 = p1 = vf
LC
0
0
e anche T vf = : in altri termini, un'onda percorre una distanza pari alla sua lunghezza
d'onda in un intervallo di tempo pari a un periodo (temporale). Nel graco spaziotemporale di Fig. 1.9 le rette z = vft sono chiaramente riconoscibili nella direzione delle
\creste".
Consideriamo ora il secondo termine dell'espressione della tensione (1.69), disegnato
in Fig. 1.9b. Troviamo subito, con ragionamenti analoghi ai precedenti, che esso descrive
un'onda regressiva che si muove con velocita di fase negativa
vf = ; !k 0 = ; p1
(1.74)
LC
0
Inoltre la corrente e proporzionale alla tensione attraverso il fattore ;Y1. Anche qui le
\creste" sono allineate alle rette z = ;vft.
In conclusione, ritroviamo il risultato della sezione 1.4: la soluzione generale delle
equazioni delle linee di trasmissione si esprime come combinazione lineare di due onde,
una progressiva che si propaga nel verso delle z crescenti e una regressiva che si propaga
in verso opposto. Ciascuna onda e costituita di tensione e corrente che sono in un certo
senso le due facce di una stessa medaglia. E importante osservare che le due onde sono
assolutamente identiche dato che la linea di trasmissione e uniforme e quindi gode di
simmetria di riessione. Il legame di proporzionalita tra tensione e corrente di una stessa
onda (detto relazione di impedenza)
(1.75)
I0+(!) = Y1V0+(!) e I0;(!) = ;Y1V0;(!)
18
1 { Linee di trasmissione senza perdite
e solo apparententemente diverso nei due casi. Le due relazioni sarebbero identiche se
per l'onda regressiva si usasse ;z^ come verso positivo per la corrente.
Le onde progressiva e regressiva sulla linea costituiscono i due modi propri del sistema. Essi sono indipendenti (disaccoppiati) se la linea e illimitata mentre sono in genere
accoppiati dalle condizioni al contorno (generatore e carico) se la linea e di lunghezza
nita.
Quando sulla linea di trasmissione sono presenti, con la stessa ampiezza tanto l'onda
progressiva quanto quella regressiva, si dice che e presente un'onda stazionaria. Questa
denizione, anche se consacrata dall'uso, e impropria in quanto un'onda e sempre in
moto con velocita pari alla velocita di fase. In realta cio che si indica con il termine di
onda stazionaria e il risultato dell'interferenza di due onde. In ogni caso, il nome dato
al fenomeno nasce dal fatto che la (1.69), con j V ; j=j V + j si puo riscrivere in forma
fattorizzata:
v(z;t) = 2 j V0+ j cos[!0t + 21 (arg(V0+ ) + arg(V0;))]
(1.76)
cos[k0z + 21 (arg(V0+) ; arg(V0;))]
e
i(z;t) = 2Y1 j V0+ j sin[!0 t + 12 (arg(V0+) + arg(V0;))]
sin[k0z + 1 (arg(V0+) ; arg(V0;))]
(1.77)
2
cioe in forma di prodotto di una funzione della sola z e di una funzione del solo t.
La Fig. 1.9c riporta un graco spaziotemporale di v(z;t). Mentre le Figg. 1.9a e b
sugeriscono, anche a livello intuitivo, un'idea di movimento, questo graco e chiaramente
caratteristico di un fenomeno stazionario. Ulteriori considerazioni saranno fatte in 3.5.
1.6 Propagazione dello stato elettrico e interpretazioni geometriche
Abbiamo ricavato la soluzione generale delle equazioni delle linee di trasmissione nella
forma
V (z) = V0+ e;jkz + V0; e+jkz
(1.78)
I (z) = Y1V0+ e;jkz ; Y1V0; e+jkz
in cui compaiono le costanti arbitrarie V0+ e V0;. Per meglio comprendere il signicato
di queste equazioni risolviamo il problema al valore iniziale associato alle (1.59). Supponiamo cioe assegnato lo stato elettrico della linea in una sezione che scegliamo come
z = 0, cioe siano noti V (0) = V0 e I (0) = I0 : si vuole determinare lo stato V (z), I (z)
in una sezione z arbitraria. Le equazioni (1.78) valgono in ogni sezione z e quindi, in
particolare, anche in z = 0:
V (0) = V0+ + V0;
= V0
(1.79)
I (0) = Y1V0+ ; Y1V0; = I0
x1.6 { Propagazione dello stato elettrico e interpretazioni geometriche
da cui si puo ricavare V0+ e V0; :
V0+ = 21 (V0 + Z1I0 )
V;
1 (V ; Z I )
1 0
2 0
=
Sostituendo queste relazioni nella (1.78) troviamo
V (z) = 21 (V0 + Z1I0 ) e;jkz + 12 (V0 ; Z1I0 ) e+jkz
0
1
;jkz ; 1 (Y1V0 ; I0 ) e+jkz
2 (Y1 V0 + I0 ) e
2
I (z) =
ossia, tramite la formula di Eulero,
V (z) = V0 cos kz ; jZ1I0 sin kz
19
(1.80)
(1.81)
(1.82)
I (z) = I0 cos kz ; jY1V0 sin kz
Questa forma della soluzione si usa denire soluzione di tipo stazionario mentre la (1.78)
e chiamata soluzione di tipo viaggiante.
E utile descrivere la propagazione sulla linea di trasmissione in termini geometrici.
Dato che tensione e corrente in una sezione di una linea deniscono lo stato del sistema,
possiamo introdurre uno spazio complesso a due dimensioni C2 (lo \spazio degli stati")
tutti i punti del quale rappresentano possibili condizioni di lavoro (di eccitazione) della
linea di trasmissione. Al variare della coordinata z cambiano tensione e corrente sulla
linea e quindi cambia anche la posizione del punto rappresentativo.
Alla luce di queste considerazioni, possiamo riscrivere la (1.78) in forma vettoriale:
V (z) 1 + 1 e;jkz + V ;
+jkz
=
V
(1.83)
0 Y1
0 ; Y1 e
I (z)
In altre parole, lo stato in una generica sezione z si ottiene come combinazione lineare
di due \stati di base"
1 1 (1.84)
1 = Y1 ;
2 = ;Y1
con coecienti complessi V0+ e;jkz e V0; e+jkz , rispettivamente. Ovviamente, i due stati
di base in questione sono le onde progressive e regressive. Come nel piano cartesiano
della geometria analitica e possibile impiegare diversi sistemi di riferimento, cos nello
spazio degli stati possiamo descrivere l'eccitazione della linea con riferimento alla \base
naturale" V e I oppure con riferimento ai vettori 1 e 2. Tensione progressiva e regressiva si interpretano quindi come coecienti di eccitazione di tali onde. Supponendo che
in una sezione della linea tensione e corrente siano reali, si ha una situazione come quella
indicata in Fig. 1.11.
E conveniente riscrivere anche la (1.82) in forma vettoriale:
V (z) cos kz ;jZ sin kz V 1
0
(1.85)
I (z) = | ;jY1 sin kz{z cos kz } I0
[T (z;0)]
20
1 { Linee di trasmissione senza perdite
V
ψ2
ψ1
I
Figura 1.11
Rappresentazione geometrica dello stato elettrico di una linea.
dove si e introdotta la matrice [T (z;0)] che lega lo stato in una sezione z generica a
quello nella sezione iniziale in z = 0. Tale matrice e nota come matrice di transizione
nel contesto dei sistemi dinamici (in cui le variabili di stato sono reali e la variabile
indipendente e il tempo) ma coincide con la matrice catena (ABCD) del tratto di linea
visto come doppio bipolo.
La base costituita dai vettori 1 e 2 ha delle proprieta particolari rispetto a tutte le
altre che si potrebbero denire. Essa gode infatti di una proprieta di invarianza: se in
una sezione una delle due onde non e eccitata, essa non lo e in nessuna altra sezione.
Supponiamo infatti che nella sezione z = 0 l'onda regressiva non sia presente, per cui
V 1 0 =V
(1.86)
0 Y1
I0
Tramite la (1.85) troviamo subito
V (z) 1 ;jkz
(1.87)
I (z) = V0 Y1 e
Possiamo dire, in termini geometrici, che il vettore di stato rimane parallelo a se stesso
in quanto risulta solo moltiplicato per lo scalare expf;jkzg. In termini algebrici questo vettore di stato e autovettore della matrice di transizione [T (z;0)], con autovalore
expf;jkzg. Discorso del tutto analogo vale per l'onda regressiva (vettore 2 ). Per confronto, osserviamo che se la tensione, per esempio, e nulla in una sezione, essa non lo
e identicamente su tutta la linea (salvo, beninteso, il caso di linea priva di eccitazione,
stato nullo). Si vede dunque che anche sia eccitato uno solo degli stati di base (modi
propri) del sistema, si richiede che V0=I0 = Z1. In caso contrario entrambi i modi sono
eccitati, con ampiezze date dalla (1.80). Si noti che 1 , e 2 non sono ortogonali (se
Z1 6= 1).
1.7 Soluzione delle equazioni delle linee con la tecnica matriciale
Nelle sezioni precedenti si e ottenuta la distribuzione di tensione e corrente su una linea
a partire dall'equazione del second'ordine. In questa sezione questo risultato si ricava
dal sistema del primo ordine con una tecnica piu astratta, ma che fornisce direttamente
l'interpretazione geometrica delle onde progressiva e regressiva come modi del sistema.
x1.7 { Soluzione delle equazioni delle linee con la tecnica matriciale
21
Riprendiamo dunque le equazioni delle linee di trasmissione nel dominio spettrale
8 d
>
>
< ; dz V (z;!) = j! L I (z;!)
(1.88)
>
>
d
: ; I (z;!) = j! C V (z;!)
dz
Queste due equazioni dierenziali accoppiate si possono riscrivere come un'unica equazione vettoriale, interpretando la tensione V e la corrente I come le componenti del vettore
complesso astratto (V I )T appartenente al piano delle fasi del sistema:
V (z;!) 0 L V (z;!) d
; dz I (z;!) = j! C 0 I (z;!)
(1.89)
Supponiamo di conoscere tensione e corrente in una sezione z0 della linea e di voler
calcolare queste grandezze in una sezione generica z. E noto dalla matematica che la
soluzione di questo problema al valore iniziale e:
V (z;!) 0 L
V (z ;!) 0
(1.90)
I (z;!) = exp ;j! C 0 (z ; z0 ) I (z0;!)
E noto anche che la funzione di una matrice si calcola facilmente nella base costituita dagli
autovettori della matrice stessa. Calcoliamo dunque tali autovettori. Occorre risolvere il
problema
0 L 1 0 u 1
(1.91)
C 0 ; 0 1
u2 = 0
Si trova subito
8
p
>
>
< 1 = LC
=>
p
>
=
;
LC
2
:
1 !
q
[u1] = C =L
1 !
q
[u2] = ; C =L
(1.92)
Gli autovettori, in quanto soluzioni di un problema omogeneo, hanno norma arbitraria e
si e scelta pari a uno la prima componente (cioe la componente \tensione").
Deniamo la matrice modale le cui colonne sono costituite dai due autovettori:
1 q
1 !
q
[M ] =
(1.93)
C ; C
L
L
La matrice [M ] soddisfa, insieme alla matrice diagonale degli autovalori, la relazione
0 L
0 1
[
M
]
=
[
M
]
(1.94)
C 0
0 2 :
Si dimostra che se f (x) e una funzione analitica, allora
0 L f ( ) 0 f C 0 [M ] = [M ] 0 1 f (2)
(1.95)
22
1 { Linee di trasmissione senza perdite
da cui, moltiplicando da destra per [M ];1 ,
0 L f ( ) 0 f C 0 = [M ] 0 1 f (2) [M ];1 :
(1.96)
Applicando questa proprieta all'esponenziale della matrice nella (1.90), si ottiene:
V (z;!) expf;jk(z ; z )g
V (z ;!) 0
0
0
;
1
I (z;!) = [M ]
0
expf+jk(z ; z0 )g [M ]
I (z0 ;!) (1.97)
p
dove k = ! LC . L'inversa di [M ] risulta essere
0 qL 1
1
1
[M ];1 = 2 @ qCL A
(1.98)
1; C
per cui la (1.97) si riscrive
V (z;!) cos k(z ; z ) ;jZ sin k(z ; z ) V (z ;!) 0
1
0
0
(1.99)
I (z;!) = | ;jY1 sin k(z ; z0 ){z cos k(z ; z0 ) } I (z0;!)
[T (z;z0)]
Questa relazione e identica alla (1.85), salvo la leggera generalizzazione legata al fatto
che la sezione iniziale si trova in z = z0 invece che nell'origine.
La (1.99) e il risultato nale del calcolo, ma la (1.97) e fondamentale per l'interpretazione, perche rende esplicito il cambiamento di base, dalla base naturale V , I a quella
modale costituita dalle onde progressive e regressive.
Capitolo 2
Esempi di linee di trasmissione
2.1 Introduzione
Nel capitolo 1 si sono ricavate le equazioni delle linee di trasmissione sulla base di un
modello fenomenologico che fa riferimento a quattro parametri primari: L (induttanza
per unita di lunghezza, p.u.l.), R (resistenza p.u.l.), C (capacita p.u.l.), G (conduttanza
p.u.l.). Si e poi discussa la tecnica di soluzione che permette di determinare l'evoluzione
dello stato elettrico sulla linea. Occorre naturalmente conoscere i valori delle quattro
costanti primarie per la linea di trasmissione che si sta studiando e questo e l'argomento
di questo capitolo. Notiamo subito che questo problema deve essere arontato a partire
dalla teoria elettromagnetica, basata sulle equazioni di Maxwell. Per tale motivo in questo capitolo ci limitiamo a riportare le espressioni relative alle varie strutture, rinviando
ai testi citati in bibliograa per ulteriori dettagli e approfondimenti. In particolare, in
questo capitolo saranno riportate solo le espressioni relative all'induttanza e alla capacita
per unita di lunghezza. I parametri legati alle perdite saranno riportati nel capitolo 4.
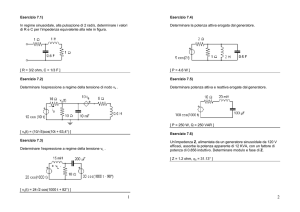
2.2 Cavo coassiale
Il cavo coassiale e una linea di trasmissione costituita da due conduttori cilindrici coassiali, separati da un dielettrico (vedi Fig. 2.1). I due conduttori, qui ragurati come
omogenei, sono spesso costituiti da li di piccolo diametro intrecciati. Il conduttore
esterno e denominato \calza" in gergo tecnico.
Detto r la costante dielettrica relativa del materiale che separa i conduttori, i parametri della linea di trasmissione sono:
20 r ;
0 log D ;
C = log(
L
=
(2.1)
D=d)
2
d
s
D 60
0 1
Z1 = 2 log d p log( Dd );
(2.2)
0 r
r
vf = pc ;
(2.3)
r
23
24
2 { Esempi di linee di trasmissione
d
D
Cavo coassiale. Sono riportate le linee di forza del
campo elettrico (continue) e del campo magnetico (tratteggiate).
Figura 2.1
dove i logaritmi sono in base e.
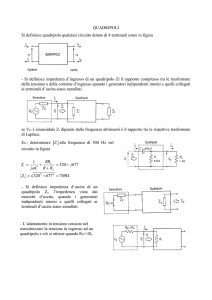
La Fig. 2.2 riporta un graco di Z1, L e C in funzione del rapporto dei diametri dei
conduttori. La Fig. 2.1 riporta la congurazione di campo elettrico e magnetico del modo
Figura 2.2
Parametri del cavo coassiale in funzione delle dimensioni geometriche.
di propagazione TEM, che e il fondamentale di questa struttura, vista come guida d'onda.
Dato che questo modo si propaga per frequenze basse a piacere, possiamo constatare che
il campo elettrico e identico a quello relativo ad un condensatore cilindrico in condizioni
statiche. Se la frequenza di lavoro cresce, si giunge a un punto in cui cominciano a
propagarsi anche altri modi, detti modi superiori. Si puo dimostrare che la massima
frequenza a cui il cavo e monomodale e approssimativamente
fmax = (Dvf+ d) ;
(2.4)
x2.3 { Linea bilare
25
a cui corrisponde una lunghezza d'onda minima
min = (D + d):
(2.5)
Esempio
Si calcolino i parametri del cavo RG58/U caratterizzato da d = 16 mm, D = 58 mm, r = 2.3.
Applicandop le formule precedenti si trova L = 0.2576 H/m, C = 99.2 pF/m, Z1 = 50.95 ,
vf =c = 1= r = 65.9%, fmax = 34.2 GHz.
2.3 Linea bilare
La linea bilare (detta anche \piattina") e una linea di trasmissione cosituita da due
conduttori cilindrici aancati. Questa struttura e in grado di guidare un modo TEM
solo se il dielettrico in cui i conduttori sono immersi e omogeneo. Le formule riportate
qui si riferiscono a questo caso. Nella realta, naturalmente, i conduttori sono aogati
in una struttura dielettrica di supporto, che fa sche il modo di propagazione sia solo
approssimativamente TEM. Normalmente comunque si usano le formule del caso ideale.
I parametri della linea bilare, la cui geometria e riportata in Fig. 2.3 sono:
r
C = cosh;10(D=d
;
L
= 0 cosh;1 (D=d);
(2.6)
)
s
D 120
D
1
0
;
1
;
1
Z1 = cosh d p cosh d ;
(2.7)
0 r
r
(2.8)
vf = pc :
r
La Fig. 2.4 riporta questi parametri in funzione delle dimensioni. Si noti che
p
se x 1:
(2.9)
cosh;1 x = log(1 + x2 ; 1) log(2x);
Questo spiega il fatto che il graco di Z1 tenda ad essere lineare in un graco semilogaritmico, quando la separazione dei conduttori e grande.
d
D
Figura 2.3
Linea bilare. Sono riportate le linee di forza del
campo elettrico (continue) e del campo magnetico (tratteggiate).
26
2 { Esempi di linee di trasmissione
Esempio
Si calcolino i parametri di una linea bilare i cui li hanno una diametro di 15 mm e una
separazione di 50 mm e sono immersi in aria.
Si trova che C = 14.82 pF/m, L = 750 nH/m, Z1 = 224.96, vf = c.
Mentre un cavo coassiale e una struttura sbilanciata, in quanto il conduttore esterno
e molto spesso connesso a massa, la linea bilare e una struttura bilanciata. Inoltre,
dato che il campo del modo TEM si estende, a rigore, in tutto lo spazio, questa linea
non e mai isolata dagli altri conduttori eventualmente presenti e questo causa problemi
di compatibilita elettromagnetica.
Figura 2.4
Parametri della linea bilare in funzione delle dimensioni geometriche.
2.4 Filo su piano metallico
Questa linea e costituita da un lo parallelo ad un piano metallico di massa (Fig. 2.5a).
Se il piano metallico e innito si puo applicare il teorema delle immagini che permette
di costruire una linea bilare (Fig. 2.5b) che e rigorosamente equivalente alla linea che
stiamo considerando. Quando il piano metallico e limitato, l'equivalenza e solo approssimata. Se comunque le sue dimensioni sono molto maggiori della distanza h tra il lo
ed il piano stesso, gli errori sono trascurabili.
I parametri di questa linea sono dunque:
0 r
C = cosh
L = 0 cosh;1 (2h=d);
(2.10)
;1 (2h=d) ;
!
!
s
1
2
h
120
2
h
0
;
1
;
1
Z1 = cosh
(2.11)
d pr cosh
d ;
0 r
vf = pc :
(2.12)
r
x2.5 { Linea bilare schermata
d
27
d
h
D= 2h
(a)
Figura 2.5
(b)
(a) Filo su piano metallico e (b) linea bilare equivalente.
Esempio
Si consideri un lo di diamentro d = 32 mm in aria posto ad una altezza h = 1 cm su un piano
conduttore.
Si trova che C = 14.26 pF/m, L = 0.78 H/m e Z1 = 233.73 .
2.5 Linea bilare schermata
Per evitare i problemi di compatibilita elettromagnetica della linea bilare, a volte questa
viene inserita all'interno di un conduttore cilindrico. Si ottiene dunque la struttura
riportata in Fig. 2.6. Si noti che questa e una linea a tre conduttori (due piu uno di
2h
Campo elettrico
D
Figura 2.6
d
Campo magnetico
Linea bilare schermata e congurazione di campo del modo bilanciato.
massa) e quindi si puo dimostrare che vi sono due modi TEM, uno bilanciato e uno
sbilanciato, con parametri leggermente diversi. La congurazione di campo riportata in
Fig. 2.6 e quella del modo bilanciato, in cui i due conduttori centrali hanno potenziali
simmetrici rispetto a massa. I parametri relativi sono calcolabili tramite le seguenti
equazioni:
0 r
C=
2 ; h2 ) ! ;
2
h
(
D
log
d(D2 + h2 )
2 ; h2 ) !
2
h
(
D
0
L = log d(D2 + h2 ) ;
(2.13)
28
2 { Esempi di linee di trasmissione
!
s
2
2
Z1 = 1 0 log 2dh((DD2 +;hh2)) ;
0 r
vf = c :
r
(2.14)
(2.15)
Esempio
Si consideri una linea bilare schermata di diametro D = 100 mm con conduttori interni di
diametro d = 15 mm e spaziati di 2h = 50 mm.
Applicando le formule precedenti, i parametri caratteristici della linea risultano: C = 25.77 pF,
L = 0.43 H, Z1 = 129.39 .
2.6 Linea a striscia (stripline)
La linea a striscia e una linea di trasmissione costituita da una striscia metallica posta
tra due piani metallici (Fig. 2.7) mantenuti allo stesso potenziale (massa). Quindi, dal
w
b
Figura 2.7
Geometria della linea a striscia.
punto di vista elettrico, si tratta di una linea a due conduttori. Anche se il modo di
propagazione fondamentale di questa struttura e rigorosamente TEM, non e possibile
calcolare i parametri caratteristici in termini di funzioni elementari. Diamo solo una
formula approssimata per calcolare l'impedenza caratteristica, nell'ipotesi che lo spessore
della striscia sia trascurabile:
30
b
Z1 p
(2.16)
r we + 0: 441b
dove la larghezza equivalente della striscia we si calcola da
8
we = w ; < 0
2 se w=b > 0: 35;
w
(2.17)
b
b : 0: 35 ; b se w=b < 0: 35
La velocita di fase, come in tutte le strutture TEM, e data da
vf = pc :
r
(2.18)
Le equazioni precedenti sono adatte a un problema di analisi, in cui si conoscono le
dimensioni della struttura. In un problema di progetto, invece, in cui le dimensioni sono
x2.7 { Microstriscia
29
da determinarsi, in modo da ottenere un valore adeguato di impedenza caratteristica, si
possono usare le seguenti, ottenute invertendo le (2.16) e (2.17):
(
w= x
se p
r Z1 < 120 ;
p
p
(2.19)
0: 85 ; 0: 6 ; x se r Z1 > 120 b
dove
; 0: 441
x = p30
(2.20)
r Z1
Esempio
Dimensionare una stripline con Z1 = 50 , b = 0.32 cm, r = 2.2. Trovare poi la costante di
propagazione e la lunghezza d'onda alla frequenza f = 10 GHz e il ritardo = l=vf introdotto
da un tratto di linea di 5 cm.
Dato che Z1 pr = 74.2 (< 120 ) si calcola x = 0.830 tramite la (2.20) e questo e gia il
valore di w=b. Quindi w = 0.266 cm. Poi la costante di propagazione si trova da
p
k = ! = ! = 2f r = 3: 1065 cm;1
e
vf
c=pr
= 2k = 2: 0212 cm;
c
p
l
l
= v = c r = 0: 247 ns:
f
In Fig. 2.8 sono riportate le curve dell'impedenza caratteristica di una linea a striscia
di spessore f non trascurabile.
2.7 Microstriscia
Una linea a microstriscia e costituita da una striscia conduttrice depositata su un substrato dielettrico metallizzato sulla faccia posteriore, come illustrato in Fig. 2.9. Dato che
la sezione trasversale della linea non e omogenea, il modo di propagazione fondamentale
non e rigorosamente TEM. In realta nelle condizioni pratiche di impiego le componenti longitudinali dei campi elettrico e magnetico sono molto piccole rispetto alle altre e
si usa la cosiddetta \approssimazione quasi-TEM". Anche in questo ambito non si puo
esprimere in forma analitica l'impedenza caratteristica, ma si possono usare delle formule approssimate. Nel caso di un problema di analisi, in cui le dimensioni della linea
sono note, si calcola innanzitutto una costante dielettrica equivalente e che dipende
non soltanto dal dielettrico che costituisce il substrato, ma anche dalle dimensioni della
striscia:
0
1
1
+
1
A:
(2.21)
e = r 2 @1 + q
1 + 12h=w
La velocita di fase si calcola come al solito in termini di questa costante equivalente
vf = pc
(2.22)
e
30
2 { Esempi di linee di trasmissione
Figura 2.8
Impedenza caratteristica di una stripline in funzione delle sue dimensioni.
ε
Figura 2.9
Conduttore di massa
Linea a microstriscia.
e l'impedenza caratteristica e data da
!
8
8
h
w
w < 1;
>
60
p log +
>
se
>
w 4h
h
< e
Z1 = >
120
w
se w > 1
w
>
p
>
h
: e + 1: 393 + 0: 667 log + 1: 44
h
h
(2.23)
dove i logaritmi sono in base e. Queste formule non sono adatte al progetto e si usano
invece le seguenti. Innanzitutto si calcolano tre grandezze ausiliarie:
s
0
:
11
Z
1
r + 1 r ; 1
A = 60
2 + r + 1 0: 23 + r
(2.24)
x2.7 { Microstriscia
31
B = 2Z377p
1 r
Poi si ha
(2.25)
C = log(B ; 1) + 0: 39 ; 0:61
r
8 8eA
w < 2;
>
>
se
2
A
<
h
w = e ;2
>
h >2
: B ; 1 ; log(2B ; 1) + r ; 1 C se w > 2
2r
h
(2.26)
(2.27)
Esempio
Calcolare la larghezza w e la lunghezza l di un tratto di microstriscia
con impedenza caratteristica Z1 = 50 , che introduca una00 rotazione di fase di 90 alla frequenza f = 2.5 GHz.
Inoltre lo spessore del substrato e 1=20 e r = 2.2.
Calcoliamo A = 1.159, B = 7.985 e C = 2.056. Inoltre dalla prima delle (2.27) risulta w=h =
3.125, che essendo maggiore di 2 non e accettabile. Dalla seconda, invece, risulta w=h = 3.081,
che, essendo nel dominio di validita dell'equazione, e accettabile. Si trova allora w = 0.391 cm.
Poi dalla (2.21) si calcola la costante dielettrica equivalente, e = 1.87. Quindi la costante di
propagazione e data da
2f pe
k = c = 77: 622 rad/m = 44: 497 =cm:
Dovendo poi essere lo sfasamento kl = =2, risulta l = 2.0226 cm.
Le Fig. 2.10 e Fig. 2.11 riportano i graci di e in funzione di w=h nei due casi di
striscia larga e stretta, per diversi valori di r del substrato. Le Fig. 2.12 e Fig. 2.13
riportano i graci analoghi di impedenza caratteristica Z1.
Si noti che la costante dielettrica e data dalla (2.21) non dipende dalla frequenza,
come e giusto che sia per un modo TEM. Se invece si vuole usare un modello piu accurato
che tenga conto della dispersione legata al fatto che il modo di propagazione non e
rigorosamente TEM, si puo usare la formula approssimata (Getzinger, 1973)
e = r ; r ; 2e (0)
(2.28)
1 + f =fp2 G
dove e (0) e il valore a frequenza nulla dato dalla (2.21) e gli altri parametri sono
fp = Z10=(20h)
(2.29)
oppure
fp(GHz) = 0: 398Z10=h(mm)
(2.30)
e
G = 0: 6 + 0: 009Z10:
(2.31)
essendo Z10 l'impedenza caratteristica (in ) della microstriscia valutata in condizioni
statiche. L'impedenza caratteristica alla frequenza di lavoro si calcola poi dalla (2.23)
con questo valore di e (f ).
32
2 { Esempi di linee di trasmissione
Costante dielettrica equivalente e in
funzione delle dimensioni della microstriscia (striscia
larga).
Figura 2.10
Costante dielettrica equivalente e in
funzione delle dimensioni della microstriscia (striscia
stretta).
Figura 2.11
x2.7 { Microstriscia
Impedenza caratteristica Z1 in funzione
delle dimensioni della microstriscia (striscia larga).
Figura 2.12
Impedenza caratteristica Z1 in funzione
delle dimensioni della microstriscia (striscia stretta).
Figura 2.13
33
34
Capitolo 3
Circuiti contenenti linee di trasmissione
3.1 Introduzione
Dopo aver costruito la soluzione generale delle equazioni delle linee di trasmissione nel
capitolo 1, possiamo iniziare a studiare alcuni semplici circuiti. I concetti fondamentali
che vengono introdotti a questo scopo sono l'impedenza locale sulla linea ed il coeciente
di riessione. La relazione tra queste due grandezze e evidenziata in forma graca nella
carta di Smith, che e lo strumento essenziale per la rappresentazione graca dello stato
elettrico su una linea. Quindi viene illustrato il calcolo della potenza transitante su una
linea.
Inne si discute la possibilita di realizzare con tratti di linea terminata delle reattanze e
suscettanze tipiche di componenti concentrati, quali induttori, condensatori e risonatori.
3.2 Denizione di impedenza locale
Nell'analisi di circuti a parametri concentrati una grandezza di fondamentale importanza
e l'impedenza, denita a una coppia di morsetti come il rapporto tra i fasori di tensione e
corrente (entrante). Nel caso di una linea di trasmissione, possiamo denire un'impedenza
IL
I(z)
ZL =
V
VL
IL
Z (z) =
(a)
V ( z)
I ( z)
(b)
V(z)
Z0
0
(a) Impedenza di un bipolo e (b)
impedenza locale su una linea di trasmissione.
Figura 3.1
35
z
36
3 { Circuiti contenenti linee di trasmissione
locale Z (z) il cui valore dipende dalla coordinata z della sezione. Poniamo dunque
Z (z) = VI ((zz))
(3.1)
Sostituiamo in questa equazione le espressioni (1.82) della tensione e corrente sulla linea
che fanno riferimento ai valori di queste quantita' nella sezione del carico z = 0:
cos kz ; jZ1I0 sin kz
Z (z) = VI 0 cos
kz ; jY1V0 sin kz
0
(3.2)
V
0 ; jZ1 I0 tan kz
= I ; jY V tan kz
0
1 0
Introduciamo Z0 = V0=I0 = Z (0), impedenza locale nella sezione di riferimento z = 0 e
la precedente diventa
kz
Z (z) = 1Z;0 ;jYjZZ1 tan
(3.3)
1 0 tan kz
E conveniente introdurre l'impedenza normalizzata (o ridotta) (z) = Z (z)=Z1. La sua
legge di trasformazione si deduce subito dalla precedente equazione:
kz
(z) = 10;;jj tan
(3.4)
0 tan kz
Questa equazione permette ovviamente di calcolare l'impedenza di ingresso di un tratto
di linea chiuso su un carico di valore (normalizzato) 0. L'equazione precedente denisce
al variare di z una curva nel piano complesso , che dipende da 0. Si tratta ovviamente di
una curva chiusa a causa della periodicita della funzione tangente, che viene interamente
descritta quando la variabile z varia di =2. Questa curva e ragurata in Fig. 3.2 e
si puo dimostrare che e una circonferenza. Le intersezioni con l'asse reale, rmax e rmin
godono della proprieta
rmax rmin = 1
(3.5)
Consideriamo ora qualche esempio particolarmente signicativo.
ζ0
x
rmin
1
rmax
r
Figura 3.2
Rappresentazione nel piano complesso =
r + jx della curva (z ) denita della (3.4) al variare di z.
Esempio 1
Tratto di linea di trasmissione senza perdite, di lunghezza l, chiusa in corto circuito, vedi
x3.2 { Denizione di impedenza locale
Fig. 3.3a.
Si ha
37
0 = 0
(z) = ;j tan kz
Zing = jXing = jZ1 tan kl
X ing
Z∞
(3.6)
10
5
0
-5
Zing
-10
0
0.25 0.5 0.75
1
1.25
kl
(a)
(b)
2π
(a) Linea di trasmissione chiusa in corto
circuito e (b) corrispondente reattanza di ingresso.
Figura 3.3
Si noti che questa impedenza di ingresso e puramente immaginaria, come e logico che
sia, trattandosi di un circuito privo di perdite di dimensione nita. Si noti che se la
linea fosse illimitata, la sua impedenza d'ingresso sarebbe reale (vedremo che coincide
con Z1), in quanto in queste condizioni l'energia ceduta dal generatore non ritorna al
generatore stesso, ossia non c'e energia reattiva.
Scegliendo opportunamente la lunghezza della linea si puo ottenere qualunque reattanza di ingresso, capacitiva o induttiva. Se la linea e lunga =4, l'impedenza di ingresso
e addirittura quella di un circuito aperto. Osserviamo che l'impedenza di ingresso e una
funzione periodica di kl con periodo pari a .
Supponiamo ora di ssare a un certo valore l0 la lunghezza della linea di trasmissione.
Ricordando che k = !=vf , notiamo che la reattanza di ingresso e una funzione della
frequenza:
0
(3.7)
Xing = Z1 tan !l
vf
e naturalmente il graco di questa funzione e ancora dato dalla Fig. 3.3b.
Si puo constatare che Xing (!) e una funzione sempre crescente della frequenza, come
accade per tutti i circuiti senza perdite sia a parametri concentrati che distribuiti (Teorema di Foster). Tipico invece dei soli circuiti a parametri distribuiti e che la Xing(!)
sia una funzione periodica e quindi non polinomiale, come avviene nel caso dei circuiti a
parametri concentrati, bens meromorfa.
Si puo notare che nell'intorno di f0 = vf =(2l0), cioe di quella frequenza per cui la linea
e lunga mezza lunghezza d'onda, la reattanza d'ingresso Xing(!) ha un comportamento
38
3 { Circuiti contenenti linee di trasmissione
simile a quello della reattanza Xc(!) (c = concentrato) di un risonatore LC serie:
1
Xc(!) = !L ; !C
(3.8)
Possiamo ricavare i valori di L e C del risonatore a parametri concentrati imponendo che
Xc (!) si annulli in !0 e ivi abbia la stessa derivata di Xing. Si trova:
L = Z2v1l ;
C = 2v2lZ
(3.9)
f
f 1
E comunque evidente che l'accordo tra le due curve e solo locale, Fig. 3.4. La realizzazione
di induttori, condensatori e risonatori con tratti di linea di trasmissione e discussa con
maggiore dettaglio nella sezione 3.6.
10
X ing
Z∞
5
0
-5
10
0
0.25 0.5 0.75
1
1.25
l0
2π
vf
Figura 3.4
Reattanza d'ingresso di un tratto di linea
chiuso in corto circuito e del risonatore serie \equivalente".
Esempio 2
Tratto di linea di trasmissione senza perdite, chiuso in circuito aperto.
Si ha
0 ! 1
(z) = j cot kz
(3.10)
Zing = jXing = ;jZ1 cot kl
Il comportamento e analogo a quello della linea chiusa su un corto circuito, salvo una
traslazione del graco di kl = =2.
Esempio 3
Tratto di linea di trasmissione senza perdite chiuso su un carico reattivo.
x3.2 { Denizione di impedenza locale
X ing
Z∞
39
10
5
0
-5
Zing
-10
0
(a)
0.25 0.5 0.75
(b)
1
1.25
kl
2π
(a) Linea di trasmissione chiusa in
circuito aperto e (b) corrispondente reattanza di
ingresso.
Figura 3.5
Si trova
0 = jxL = ZZL
1
x
;
kz
(z) = j 1 +L x tan
L tan kz
E utile porre xL = tan L perche la precedente equazione diventa
da cui ricaviamo
L ; tan kz = j tan( ; kz)
(z) = j 1tan
L
+ tan tan kz
L
(3.11)
(3.12)
Zing = jXing = jZ1 tan(kl + L)
(3.13)
Vediamo che al variare del carico le curve della reattanza di ingresso si traslano rigidamente.
Esempio 4
Tratto di linea di trasmissione senza perdite, chiuso su un impedenza pari all'impedenza caratteristica Z1.
Si trova
0 = 1
(z ) = 1
(3.14)
Zing = Z1
Questo e l'unico caso in cui l'impedenza di ingresso non dipende dalla lunghezza del
tratto di linea. In questo caso la linea si dice adattata. Ovviamente l'impedenza di
ingresso continua ad essere Z1 anche quando la lunghezza tende all'innito. Se la linea
e ideale (senza perdite) questo risultato vale solo se la linea e chiusa sulla sua impedenza
40
3 { Circuiti contenenti linee di trasmissione
X ing 10
Z∞
5
xL 0
XL
-5
Zing
-10
0
(a)
0.375
0.875
(b)
kl
1.25
2π
(a) Linea di trasmissione chiusa su un
carico reattivo e (b) e relativa reattanza di ingresso.
Figura 3.6
caratteristica. In realta ammettendo l'esistenza di perdite (anche arbitrariamente piccole), l'aermazione e vera per qualunque terminazione. Questo giustica la scelta del
simbolo per l'impedenza caratteristica.
Ring
Z∞
Z∞
2
.5
1
.5
Zing
0
0
0.25 0.5 0.75
1
1.25
kl
(a)
(b)
2π
(a) Linea di trasmissione chiusa sull'impedenza caratteristica e (b) corrispondente resistenza di ingresso
(Xing = 0).
Figura 3.7
Esempio 5
Tratto di linea di trasmissione senza perdite di lunghezza l = =4 chiuso su un'impedenza
generica ZL .
Se l = =4, l'argomento della tangente nella equazione (3.4) e =2 e si e in presenza di una
forma indeterminata. Valutando il limite di (z ) per z ! ;=4 con la regola di de l'Hospital
x3.2 { Denizione di impedenza locale
si ottiene
41
2
Zing = ZZ1
ing = 1 ;
0
(3.15)
L
Questo tratto di linea di trasmissione si comporta come un invertitore di impedenza (normalizzata) e viene comunemente utilizzata per realizzare dei trasformatori di
impedenza, discussi piu avanti.
ZL
Zing
λ 4
Figura 3.8
Linea di trasmissione di lunghezza
l = =4 chiuso su un'impedenza generica ZL .
+
Vg
Zg
ZL
ZA
A
B
Circuito costituito da un generatore
e un carico connessi da una linea di trasmissione.
Figura 3.9
Esempio 6
Analisi di un circuito completo.
Siamo ora in grado di svolgere l'analisi completa del piu semplice circuito che comprende
un tratto di linea di trasmissione, alimentato a un estremo e caricato all'altro. Calcoliamo
l'impedenza di carico vista dal generatore, ZA . Essa e anche l'impedenza di ingresso del tratto
di linea di trasmissione chiuso su ZL , quindi vale
kl
ZA = 1Z+L +jYjZZ1 tan
(3.16)
tan
kl
1 L
Si tratta ora di analizzare il circuito a parametri concentrati di Fig. 3.10. Si trova subito
VA = Z Z+A Z Vg
A
g
IA = Z V+g Z
A
g
(3.17)
42
3 { Circuiti contenenti linee di trasmissione
Tensione e corrente in una sezione generica, e quindi anche sul carico, si possono calcolare con
la matrice catena (ABCD), calcolata in sezione 1.6
V (z ) V A
=
[
T
(
z;z
)]
(3.18)
A
IA
I (z )
dove
k(z ; zA) ;jZ1 sin k(z ; zA)
[T (z;zA )] = ;jYcos
(3.19)
cos k(z ; zA )
1 sin k(z ; zA )
Vedremo che nella pratica non si segue questo procedimento.
+
Vg
Figura 3.10
Zg
ZA
Circuito equivalente nella sezione A.
Esempio 7
Misura dei parametri Z1 e k di uno spezzone di linea di trasmissione.
I risultati degli esempi 1 e 2 possono essere usati come base per una tecnica di misura dei
parametri Z1 e k di uno spezzone di linea di lughezza l. Ricordiamo che l'impedenza d'ingresso
Zcc di tale spezzone, quando e chiuso in corto circuito vale, vale
Zcc = jZ1 tan kl
(3.20)
mentre Zca dato da
Zca = ;jZ1 cot kl
(3.21)
e la corrispondente impedenza d'ingresso quando lo spezzone e lasciato aperto. Queste equazioni
si possono facilmente risolvere rispetto a Z1 e k nella forma
p
Z1 = Zcc Zca
" s
#
(3.22)
Z
1
cc
k = arctg ; + n
l
Zca
La presenza dell'intero n e legata al fatto che la funzione tangente e periodica con periodo . Il
suo valore si puo determinare solo se si conosce a priori il valore approssimato della lunghezza
d'onda sulla linea. Il caso piu semplice e quello in cui lo spezzone di linea ha lunghezza minore
di =4, perche in tal caso n = 0.
3.3 Coecienti di riessione
Nei circuiti a parametri concentrati i bipoli sono caratterizzati in termini di una impedenza o di una ammettenza che gioca il ruolo di funzione di trasferimento, poiche le
x3.3 { Coecienti di riessione
43
variabili di stato sono tensione e corrente. Queste variabili, come si e visto in sezione
1.6, non sono le piu appropriate per descrivere lo stato elettrico su una linea di trasmissione. Le variabili naturali sono invece le ampiezze delle onde progressiva e regressiva, in
quanto esse sono gli stati di base (modi propri) del sistema. Vediamo allora come si puo
denire un carico generico con riferimento alla base delle onde progressiva e regressiva.
Consideriamo una linea di trasmissione di impedenza caratteristica Z1 e costante di
propagazione k chiusa su una impedenza di carico generica ZL, eccitata da un generatore
che produce un'onda progressiva che incide sul carico, Fig. 3.11:
V+
V-
ZL
0
Figura 3.11
z
Linea di trasmissione chiusa su una generica impedenza di carico.
V inc(z) = V0+ e;jkz
(3.23)
I inc(z) = Y1V0+ e;jkz
Aermare che la linea in z = 0 e chiusa sul carico ZL e equivalente a dire che in tale
sezione tensione e corrente devono essere legati dalla relazione V (0) = ZLI (0). E ovvio
che V inc e I inc soddisfano tale relazione se e solo se ZL = Z1: in tal caso la sola onda
progressiva e in grado di soddisfare la condizione al contorno. Se invece l'impedenza e
arbitraria, necessariamente si deve eccitare, sul carico, l'onda regressiva (o riessa)
V rif(z) = V0; e+jkz
(3.24)
I rif(z) = ;Y1V0; e+jkz
con una opportuna ampiezza V0; in modo che tensione e corrente totali, somma delle
grandezze corrispondenti delle due onde progressiva e regressiva, soddisno la condizione
al contorno:
V inc(0) + V rif(0) = ZL(I inc(0) + I rif(0))
(3.25)
ossia
V0+ + V0; = ZLY1(V0+ ; V0;)
(3.26)
Da qui l'ampiezza incognita V0; si ricava subito
1 V+
(3.27)
V0; = ZZLYY1 ;
0
L 1+1
Il coeciente di proporzionalita' che lega la tensione regressiva a quella progressiva si
denisce coeciente di riessione di tensione
; Z Y ;1 ;1 Z ;Z
def V0
;L = ;0 = V + = ZL Y1 + 1 = L + 1 = ZL + Z1
(3.28)
L 1
L
L
1
0
V
V
44
3 { Circuiti contenenti linee di trasmissione
Abbiamo visto nel paragrafo 1.7 che le tensioni progressive e regressive deniscono lo
stato elettrico di una linea con riferimento a due \stati" di base, specici della linea
stessa. In quest'ottica la caratteristica ingresso uscita (funzione di trasferimento) di un
bipolo lineare, che si specica in termini di una impedenza, con riferimento alle variabili
V e I , risulta denita dal coeciente di riessione di tensione nella base delle onde
progressiva e regressiva. Naturalmente, per specicare l'ampiezza
delle onde progressiva
e regressiva sulla linea, si potrebbero usare le correnti I0+ e I0; invece della tensione.
Questa scelta porterebbe a denire un coeciente di riessione di corrente:
;
;
I
;L = I;0 def
= I0+ = ;Y1V+0 = ; V;0
(3.29)
I0
Y1V0
Quindi uno stesso bipolo puo essere caratterizzato:
. tramite l'impedenza ZL o l'ammettenza YL (con ZL = 1=YL)
. tramite il coeciente di riessione di tensione V; o di corrente I; (con V; = ; I;)
Osserviamo che mentre l'impedenza di un bipolo costituisce una caraterizzazione assoluta, il coeciente di riessione e sempre relativo all'impedenza caratteristica della linea
connessa al bipolo. Da questo punto di vista tale impedenza caratteristica gioca il ruolo
di impedenza di riferimento.
Le relazioni che legano i coecienti di riessione alle impedenze/ammettenze normalizzate sono
; 1 = ;y ; 1;
1 + V; = 1 ; I;
V
; = +
=
(3.30)
1
y+1
1 ; V; 1 + I;
; 1 = y ; 1;
1 ; V; = 1 + I ;
I
; = ; +
y
=
(3.31)
1 y+1
1 + V ; 1 ; I;
con y = 1= . Tutte queste relazioni appartengono alla classe delle trasformazioni bilineari
fratte di una variabile complessa che in generale si scrivono
+b
(3.32)
w = az
cz + d
Questa classe di trasformazioni gode di una serie di proprieta che saranno discusse piu
oltre.
Abbiamo visto che la legge di trasformazione dell'impedenza locale su una linea di
trasmissione e piuttosto complicata (per inciso, e anch'essa una trasformazione bilineare
fratta). Dato che i coecienti di riessione fanno riferimento alle onde progressiva e
regressiva, che sono gli stati di base della linea, c'e da attendersi che la loro legge di
trasformazione sia semplice. Questo e esattamente cio che accade. Il coeciente di
riessione di tensione in una generica sezione z e denito come il rapporto tra le tensioni
regressiva e progressiva in quella sezione:
; +jkz
;
V
;(z) = VV +((zz)) = VV0+ ee;jkz = V;0 e+j2kz
(3.33)
0
p
Nel caso di una linea di trasmissione ideale, in cui k = ! LC e reale, il modulo del
coeciente di riessione resta costante, mentre la sua fase varia proporzionalmente a z.
In altre parole V;(z) descrive un cerchio di centro l'origine nel suo piano complesso.
x3.4 { Considerazioni energetiche
45
3.4 Considerazioni energetiche
Nello studio dei circuiti a parametri concentrati, i concetti energetici occupano un posto
importante. Cerchiamo di estenderli ai circuiti che contengono linee di trasmissione.
Consideriamo una linea di trasmissione ideale, in regime sinusoidale, chiusa su un'impedenza generica ZL (vedi Fig. 3.12). Se in una sezione z0 tensione e corrente valgono
V (z0 ) e I (z0), nella stessa sezione e denibile una potenza attiva entrante (valore medio
su un periodo temporale della potenza istantanea)
P (z0 ) = 21 RefV (z0 ) I (z0 )g
(3.34)
come ben noto dall'elettrotecnica. Questa potenza, se positiva, e assorbita dal circuito
che sta a valle di z0 (vista la convenzione di segno per la corrente) e si interpreta come
potenza transitante nella sezione z0 della linea.
ZL
z’
Figura 3.12
0
z
Linea di trasmissione chiusa su un'impedenza di carico generica.
E utile esprimere la potenza in termini delle ampiezze delle onde progressive e regressive, in quanto queste variabili, come gia detto piu volte, forniscono la descrizione piu
naturale del sistema. Ricordando le (1.67) abbiamo
P (z) = 12 Ref[V + (z) + V ;(z)] Y1 [V +(z) ; V ;(z)]g =
= 12 RefY1 [jV + (z)j2 ; jV ;(z)j2 ] + Y1 (V ;(z)V + (z) ; V +(z)V ;(z))g =
= 21 RefY1 [jV + (z)j2 ; jV ;(z)j2 ] ; j 2Y1 I mfV +(z)V ; (z)gg
(3.35)
Nel caso di linea ideale (senza perdite), Y1 e reale e quindi
+2
P (z) = 21 Y1jV +j2 ; 21 Y1jV ;j2 = j2VZ j (1 ; j V;j2)
(3.36)
1
Possiamo fare le seguenti considerazioni:
. Essendo j V;j = costante su una linea ideale, la potenza netta transitante non dipende dalla sezione considerata: cio e ovviamente coerente col fatto che una linea
ideale e senza perdite. Quindi la potenza assorbita dall'impedenza di carico ZL e
P (z0).
. In una linea senza perdite la potenza attiva netta transitante in una sezione e pari
alla dierenza tra le potenze attive associate all'onda progressiva e a quella regres-
46
3 { Circuiti contenenti linee di trasmissione
siva. Ossia la potenza netta e la dierenza tra la potenza incidente e quella riessa.
I due modi sono disaccoppiati in potenza.
. Se V; = 0, tutta la potenza incidente e assorbita dal carico che si dice \adattato"
alla linea (matched in inglese). La potenza netta coincide con quella incidente per
l'assenza dell'onda riessa. Questa condizione si verica quando ZL = Z1.
. Se j V;j = 1, la potenza riessa e uguale a quella incidente e quindi la potenza
netta transitante e nulla. Questa condizione si verica quando il carico e puramente
reattivo, infatti in tal caso
V
; = jXL ; Z1
(3.37)
jXL + Z1
ed il numeratore ed il denominatore hanno lo stesso modulo.
. Per un carico passivo, la potenza riessa e minore o uguale a quella incidente, per
cui j V;j 1. Questa condizione equivale a RefZL g 0, come dimostreremo in 3.7.
Una quantita frequentemente usata in pratica per caratterizzare un carico e il return loss
RL denito come
RL = ;10 log10 j;j2
(3.38)
Essa esprime, in dB, il rapporto tra la potenza riessa (che e \persa" dal punto di vista
del carico) e quella incidente. Quindi RL = 0 dB per un carico reattivo e RL ! 1 dB
per un carico adattato. Return loss e Rapporto d'Onda Stazionaria (ROS), introdotto
nella prossima sezione, esprimono il disadattamento del carico rispetto alla linea in modo
diverso ma equivalente. Entrambi sono molto usati in pratica (vedi Tabella 3.1).
La quantita 1 ; j V;j2 e detto coeciente di trasmissione di potenza perche e pari al
rapporto tra la potenza assorbita dal carico e la potenza incidente. Lo stesso coeciente,
espresso in dB, e detto reection loss (o perdita di riessione).
3.5 Diagrammi di tensione, corrente e impedenza sulla linea
Consideriamo una linea di trasmissione chiusa su una impedenza generica (Fig. 3.13).
Tensione e corrente sulla linea si possono esprimere nel modo seguente in termini di onde
progressive e regressive:
V (z) = V +(z) + V ;(z) = V +(z)(1 + V;(z))
(3.39)
+
;
+
V
I (z) = I (z) + I (z) = Y1V (z)(1 ; ;(z))
Visto che i coecienti di riessione per tensione e corrente sono opposti l'uno dell'altro,
useremo sempre quello di tensione anche per esprimere la corrente. Se, per semplicita si
scrivera ;(z) senza apici, e da intendere che si tratti di un coeciente di riessione per
la tensione.
Il nostro obiettivo ora e quello di disegnare i diagrammi della tensione, della corrente
e dell'impedenza su una linea di trasmissione. Iniziamo dal modulo di queste grandezze,
che sono rappresentate in Fig. 3.14. Cerchiamo di capire perche quella e la loro forma.
x3.5 { Diagrammi di tensione, corrente e impedenza sulla linea
47
ZL
z
v
L
Figura 3.13
Linea di trasmissione ideale chiusa su una impedenza di carico generica.
Il modulo di tensione e corrente e dato da
jV (z)j = jV +(z)j j1 + V;(z)j
jI (z)j = jY1
V +(z)j j1 ;
(3.40)
;(z)j
Il primo fattore jV +(z)j e costante su una linea ideale. Per quanto riguarda il secondo, si
ricordi che V;(z) = V;0 expf+j 2kzg (vedi Fig. 3.15). L'espressione analitica di jV (z)j
e quindi
jV (z)j = jV +j 1 + j V;0 j exp(j (arg( V;0 ) + 2kz)) =
(3.41)
h V 2 V
i1=2
+
V
= jV j 1 + j ;0j + 2j ;0 j cos(arg( ;0) + 2kz)
V
pertanto la curva e solo apparentemente sinusoidale. E evidente dalla gura che jV (z)j
e jI (z)j raggiungono i valori massimo e minimo quando V;(z) e reale, e inoltre:
j1 + V;(z)jmax = 1 + j V;j
(3.42)
j1 + V;(z)jmin = 1 ; j V;j
In Fig. 3.15 sono disegnati i vettori 1 + V; e 1 ; V;. Il rapporto tra i valori massimo
e minimo del modulo della tensione (e della corrente) si denisce Rapporto di Onda
Stazionaria (ROS) o VSWR in inglese (Voltage Standing Wave Ratio)
+ j ;j
S = VVmax = 11 ;
(3.43)
j ;j
min
Dato che (vedi paragrafo 3.4) il modulo di ;0 (z) di un carico passivo e sempre compreso
tra 0 (carico adattato) e 1 (carico reattivo) il ROS S e compreso tra 1 e innito. Il ROS e
normalmente impiegato in pratica per specicare il disadattamento di un carico rispetto
a una resistenza di riferimento (Z1). Dunque ROS, return loss RL, reection loss e
modulo del coeciente di riessione esprimono in modo equivalente il disadattamento.
La Tabella 3.1 fornisce le corrispondenze per alcuni valori.
Si e visto in Fig. 3.2 che l'impedenza locale normalizzata (z) descrive un cerchio
nel piano complesso della variabile . Allora il modulo dell'impedenza e una funzione
oscillante della coordinata longitudinale e i valori estremi del modulo sono assunti quando
V
V
V
48
3 { Circuiti contenenti linee di trasmissione
2
V ( z)
V+
1
-1.5
-1
kz (2π )
-0.5
0
0
2
I ( z)
I+
1
-1.5
-1
kz (2π )
-0.5
0
0
3
Z (z)
Z∞
2
1
-1.5
-1
-0.5
kz (2π )
0
0
Figura 3.14
Graco dei moduli di tensione, corrente e impedenza locale su
una linea di trasmissione ideale chiusa sull'impedenza di carico ZL = (1 + j )Z1 .
(z) e reale e valgono
+
Rmax = VImax = jYjV V j+(1j(1+;j j ;j;)j) = Z1S
min
1
+
Rmin = IVmin = jYjV V j+(1j(1;+j j ;j;)j) = ZS1
max
1
V
V
V
(3.44)
V
Sulla base di questi risultati si trova che la circonferenza di Fig. 3.2 ha centro in c e
raggio R dati da
1 1 + j;j2
1
(3.45)
c = 2 S + S = 1 ; j;j2
e
R = 21 S ; S1 = 1 ;2j;j;j j2
(3.46)
x3.5 { Diagrammi di tensione, corrente e impedenza sulla linea
49
V
1+
V
(z)
V
-1
1−
V
Figura 3.15
( z)
(z )
−V
Graco nel piano complesso del coeciente di riessione.
Tabella 3.1
Corrispondenza tra valori di return loss,
modulo del coeciente di riessione, ROS e reection loss
Return Loss (dB)
0
3
5
10
15
20
30
j ;j
1
0.7079
0.5623
0.3162
0.1778
0.1
0.0316
V
ROS Reection Loss (dB)
1
0
5.8480
3.0206
3.5697
1.6508
1.9249
0.4575
1.4325
0.1395
1.2222
0.0436
1.0653
0.0043
E chiaro che la circonferenza degenera nell'asse immaginario se j;j ! 1, cioe quando il
carico e reattivo.
Con semplici calcoli e possibile vericare che la fase di tensione, corrente ed impedenza
normalizzata sulla linea hanno le espressioni seguenti:
V
kz + arg V;0 )
arg V (z) = arg V0+ ; kz + arctan 1 +j j;V0;j sin(2
(3.47)
0 j cos(2kz + arg V ;0 )
V
kz + arg V;0 )
arg I (z) = arg I0+ ; kz ; arctan 1 ;j j;V0;j sin(2
j cos(2kz + arg V; )
0
0
(3.48)
V
kz + arg V;0)
arg (z) = arctan 1 +j j;V0;j sin(2
0 j cos(2kz + arg V ;0 )
V
kz + arg V;0)
+ arctan 1 ;j j;V0;j sin(2
(3.49)
0 j cos(2kz + arg V ;0 )
Le fasi di tensione e corrente sono funzioni sempre decrescenti per valori di z crescenti
(Fig. 3.16), mentre si riducono ad una costante quando il carico e reattivo; in tal caso
arg V (z) = arg V0+ + 12 arg V;0
(3.50)
50
3 { Circuiti contenenti linee di trasmissione
10
+
arg(I(z)/I0 )
+
arg(V(z)/V0)
-1.5
-1
-0.5
kz (2π )
5
0
0
1
arg
Z (z)
Z∞
0
-1.5
-1
-0.5
kz (2π )
-1
0
Andamento della fase di tensione, corrente e impedenza lungo una
linea di trasmissione ideale terminata sull'impedenza di carico Z0 = (1 + j )Z1 .
Figura 3.16
arg I (z) = arg I0+ + 21 arg V;0 ; 2
(3.51)
L'impedenza normalizzata, come gia evidenziato dall'equazione (3.4), ha invece un andamento periodico (Fig. 3.16). In particolare in corrispondenza dei punti z lungo la linea
dati da
!
(2
m
+
1)
V
;
m = 0;1; : : : ;
z < 0:
(3.52)
kz = ; arg ;0 +
4
arg (z) raggiunge i valori massimi e minimi 2 arctan j V;0j. Se il carico e reattivo, la
fase di (z) assume il valore costante =2.
3.6 Componenti reattivi a parametri distribuiti
Gli ordinari induttori e condensatori sono in genere componenti che possono essere impiegati solo a frequenza relativamente bassa, cioe ntanto che i parametri parassiti non
diventanto cos importanti da alterare la risposta del componente. Induttori e condensatori ideali sono caratterizzati da una reattanza e da una suscettanza, rispettivamente,
proporzionale alla frequenza. I componenti realizzati con le tecnologie tipiche delle basse
frequenze hanno una frequenza massima d'impiego che puo essere inferiore alle necessita.
Per superare questo problema occorre cambiare struttura e in questa sezione vedremo
come si possa usare una linea di trasmissione per realizzare componenti reattivi per alte
frequenze.
x3.6 { Componenti reattivi a parametri distribuiti
51
3.6.1 Induttori
Riprendiamo l'equazione (3.6) che fornisce l'impedenza d'ingresso di un tratto di linea
chiuso in corto circuito:
Zl = jZ1 tan kl
(3.53)
dove il pedice l sta a ricordare che questo componente e costituito da una linea. Ricordiamo ancora che l'argomento della tangente si puo scrivere
kl = !l
(3.54)
vf = !
dove si e introdotto il tempo di transito sulla linea. Se ora ! 1, cioe il componente
e quasi concentrato per le frequenze di lavoro, si puo sviluppare la tangente in serie di
Taylor e scrivere
1
3
Zl jZ1 ! + 3 (! )
(3.55)
Troncando lo sviluppo al primo termine notiamo che la reattanza ha una dipendenza
lineare dalla frequenza e che l'induttanza equivalente realizzata vale
s
p
Leq = Z1 = LC l LC = lL
(3.56)
Possiamo chiederci qual e la massima frequenza a cui questo componente funziona in
modo accettabile. Deniamo un errore relativo della reattanza realizzata rispetto a
quella del componente ideale concentrato:
X ; X Z tan ! ; Z ! 1
1 (! )2
l c = 1
(3.57)
3
Xc
Z1!
Questa stima dell'errore e accurata al 10% se ! 0: 45 rad. Supponendo che l'errore
sulla reattanza debba essere inferiore a " su tutta la banda di lavoro, troviamo che la
massima frequenza di lavoro e
p
3"
(3.58)
fmax = 2
Esempio
Si progetti un induttore da 3 nH che produca al massimo un errore
dell'1% sulla reattanza sulla
banda da 0 a 500 MHz. La linea ha velocita di fase vf = 2 108 m/s.
Si calcola
p
= 2f3" = 5: 51 10;11 s
e poi
a cui corrisponde l = 1.10 cm.
max
Z1 = Leq = 54: 41
Osserviamo che questi risultati, qui ottenuti con un metodo puramenente matematico,
si possono facilemente giusticare in termini del modello a scala LC della linea. In questa
52
3 { Circuiti contenenti linee di trasmissione
/∆ z
/∆ z
&∆ z
/∆ z
&∆ z
Figura 3.17
Rete a scala equivalente alla
linea di trasmissione chiusa in corto circuito.
rete le induttanze producono una piccola reattanza, i condensatori una reattanza molto
grande. Eettuando il parallelo, l'eetto del condensatore e trascurabile e l'induttanza
della prima cella si somma a quella della seconda. La cosa continua nche la reattanza
complessiva del ramo serie e confrontabile con quella del ramo parallelo. Questo ssa un
limite superiore alla lunghezza elettrica della linea, al di la della quale la linea cessa di
comportarsi come un induttore.
3.6.2 Condensatori
Se una linea corta chiusa in corto circuito approssima un induttore, si puo vedere semplicemente che una linea corta in circuito aperto approssima un condensatore. Infatti
l'ammettenza di ingresso di un tratto di linea di lunghezza l in circuito aperto e
Yl = jY1 tan kl = jY1 tan !
(3.59)
dove = l=vf e il tempo di transito sulla linea. Se la linea e corta, cioe ! 1 si puo
sviluppare la funzione tangente:
1
3
Yl jY1 ! + 3 (! )
(3.60)
Se tronchiamo lo sviluppo al primo termine, otteniamo un'ammettenza di ingresso con
dipendenza lineare dalla frequenza e la capacita equivalente vale
s
p
Ceq = Y1 = LC l CL = lC
(3.61)
Come gia nel caso dell'induttore, l'approssimazione e accettabile ntanto che il contributo
del termine cubico alla suscettanza e trascurabile. L'errore relativo sulla suscettanza
realizzata rispetto a quela del corrispondente condensatore ideale e
Bl ; Bc Y1 tan ! ; Y1! 1
= (! )2;
(3.62)
Bc
Y1!
3
dove la stima dell'errore e accurata al 10% se ! 0: 45 rad. Imponendo che tale errore
sia minore di una soglia ", troviamo che la massima frequenza di impiego e
p
3"
(3.63)
fmax = 2
come gia nel caso dell'induttore. Il risultato (3.61) si puo giusticare intuitivamente sulla
base del modello a scala LC della linea (vedi Fig. 3.18). In questa rete le induttanze
x3.6 { Componenti reattivi a parametri distribuiti
/∆ z
/∆ z
&∆ z
Figura 3.18
53
&∆ z
Rete a scala equivalente alla linea di trasmissione in circuito aperto.
producono una piccola reattanza e le capacita una piccola suscettanza, cioe una grande
reattanza. Eettuando la serie il contributo dell'induttanza e quindi trascurabile e i due
condensatori sono sostanzialmente in parallelo. Procedendo lungo la linea, considerando
cioe un tratto di linea via via piu lungo, ad un certo punto la reattanza del carico e
confrontabile con quella dell'induttanza serie. In questa maniera si giustica l'esistenza
di un limite superiore alla lunghezza elettrica della linea. Per lunghezze superiori la linea
non si comporta piu come un condensatore.
3.6.3 Risonatori
Abbiamo visto che una linea di trasmissione chiusa in corto circuito si comporta come
un induttore se la sua lunghezza elettrica e piccola. Quando la lunghezza elettrica e 1/4,
l'impedenza d'ingresso e quella di un circuito aperto e per lunghezze elettriche prossime
a questo valore la struttura si comporta come un risonatore parallelo concentrato. Infatti
la suscettanza d'ingresso della linea e
Bl = ;Y1 cot !
(3.64)
mentre quella di un risonatore concentrato LC e
1
Bc = !C ; !L
(3.65)
Scegliendo opportunamente L e C la curva Bc approssima Bl nell'intorno di ! = !0 =
=(2 ). Imponiamo allora le due condizioni
Bl(!0) = Bc (!0)
(3.66)
dBl = dBc d! !
d! !
in modo da raggiungere lo scopo sopra indicato. Dalla prima si trova
= ! = p1
(3.67)
0
2
LC
Dalla seconda
(3.68)
Y1 sin21! = C + !12L !=!
!=!
ossia
Y1 = C + !12L = 2C
(3.69)
0
0
0
0
0
54
3 { Circuiti contenenti linee di trasmissione
Da queste due condizioni segue subito
C = 2 Y1
(3.70)
8
L = 2 Z1
Per trovare il campo di validita dell'approssimazione e conveniente riscrivere Bc(!) nella
forma
! !0 Bc = !0C ! ; ! = !0C
(3.71)
0
dove la grandezza adimensionata (3.72)
= !! ; !!0
0
descrive lo scostamento della frequenza di lavoro da quella di risonanza. La relazione
inversa alla precedente e
s
! = + 1 + 2
(3.73)
!0 2
2
Esprimiamo ora Bl in termini della variabile 2 0 s 13
2
Bl = ;Y1 cot ! = ;Y1 cot 2 !! = ; 4!0C cot 4 2 @ 2 + 1 + 2 A5 (3.74)
0
dove l'espressione di Y1 si ricava da (3.69) e (3.67). Se ora sviluppiamo Bl() in serie di
Taylor attorno a = 0 troviamo
1 Bl !0 C + 4 2
(3.75)
Questa espressione conferma che, almeno per piccolo, il risonatore concentrato approssima quello distribuito. Introduciamo l'errore relativo sulla suscettanza della linea
rispetto a quella del risonatore concentrato
Bl ; Bc 1
(3.76)
Bc 4 Questa stima dell'errore e accurata al 10% se 0: 2. Troviamo che tale errore e
inferiore ad una soglia pressata " se jj max = 4" a cui corrisponde
p
p
1 + 4"2 ; 2" !! 1 + 4"2 + 2"
(3.77)
0
Se " e piccolo tale banda si riscrive
1 ; 2" !! 1 + 2"
0
(3.78)
Sappiamo che la funzione Bl(!) e periodica quindi il comportamento e quello ora
descritto anche nell'intorno delle frequenze
!0n = (2n + 1) 2
(3.79)
x3.6 { Componenti reattivi a parametri distribuiti
55
I corrispondenti valori di L e C sono
C = Y12 (3.80)
8
Z
1
L = 2(2n + 1)2
Osserviamo pero che quanto piu n e grande e quindi la linea e lunga, tanto piu la banda
relativa su cui Bc approssima Bl e piccola. Questo e ovvio se si pensa che la dierenza
tra le frequenze di risonanza successive e costante.
Per quanto riguarda l'accuratezza dell'approssimazione vale ancora la (3.76) anche se
pero quella stima dell'errore e accurata al 10% solo per 0: 3=(n+0: 5). Questo esempio
mette in luce una proprieta basilare dei circuiti a parametri distribuiti: la banda di un
componente e tanto piu piccola quanto piu grande e la lunghezza elettrica
del componente.
Se riconsidriamo la Fig. 3.4, osserviamo che nell'intorno delle frequenze
!0n = n
n = 1;2; : : :
(3.81)
2;
la linea chiusa in corto circuito si comporta come un risonatore serie. I suoi elementi
si trovano imponendo che le due reattanze, della linea e del risonatore concentrato, e le
loro derivate coincidano alla frequenza !0n
Xl(!0n) = Xc (!0n)
(3.82)
dXl = dXc d! ! n
d! ! n
Esplicitando queste equazioni troviamo
n = ! = p 1
(3.83)
0n
LC
Z1 = 2L
(3.84)
da cui segue
C = Z12 (3.85)
2
Y
1
L = (n)2
Anche in questo caso introduciamo la grandezza denita dalla (3.72) ed esprimiamo le
due reattanze Xc e Xl in termini di essa
Xc = !0nL
2 0 s 13
(3.86)
2
2
Xl = !0nL tan 4n @ 2 + 1 + 2 A5
0
0
56
3 { Circuiti contenenti linee di trasmissione
Sviluppiamo Xl in serie di Taylor attorno a = 0 e troviamo
1 Xl !0nL + 4 2
(3.87)
Vediamo che per piccoli valori di Xl e approssimato da Xc. Per quanto riguarda
l'accuratezza dell'approssimazione, possiamo stimare l'errore relativo sulla reattanza con
Xl ; Xc 1
(3.88)
Xc 4 formula accurata al 10% per 0: 3=n.
Anche in questo caso, ovviamente, la banda del componente distribuito e tanto piu
piccola quanto piu la lunghezza elettrica e grande.
Oserviamo inne che una linea in circuito aperto ha un comportamento duale a quello
nora descritto. In particolare nell'intorno di
!0(pn ) = n
n = 1;2; : : :
(3.89)
;
si ha un comportamento tipo risonatore parallelo, mentre nell'intorno di
!0(sn) = 2n + 1 ;
n = 1;2; : : :
(3.90)
quello di risonatore serie.
3.7 La Carta di Smith
La carta di Smith e uno strumento graco di grande importanza per la soluzione dei
problemi di linee di trasmissione. La sua utilita, attualmente, non sta piu nel fornire
la soluzione numerica di un problema, ma nell'aiutare a visualizzare geometricamente
i fenomeni che hanno luogo su una linea di trasmissione. Tutti i moderni software per
l'analisi e il progetto automatico (CAD) di circuiti a parametri distribuiti, nonche tutti
gli strumenti di misura presentano i risultati su una carta di Smith. La carta di Smith e
costituita da una porzione del piano complesso V; su cui sono riportate opportune curve
coordinate. Essa traduce gracamente le due relazioni, viste in 3.3:
1;
1 + V;
V
; = ;
=
(3.91)
+1
1 ; V;
dove = Z=Z1 = r + jx e l'impedenza normalizzata e V; = V;r + j V;i e il coeciente
di riessione per la tensione. Entrambe sono variabili complesse e per rappresentare
gracamente le precedenti relazioni in un piano si puo seguire l'accorgimento di tracciare,
nel piano complesso V; due famiglie di curve: lungo quelle della prima famiglia e costante
la parte reale dell'impedenza (curve a resistenza costante), lungo quelle della seconda e
costante la parte immaginaria dell'impedenza (curve a reattanza costante). In tal modo
risulta immediato fare la trasformazione ! V; o viceversa.
Si puo dimostrare che la trasformazione bilineare fratta (3.91) ha la proprieta seguente:
se la variabile descrive una circonferenza nel suo piano complesso, anche i corrispondenti
x3.7 { La Carta di Smith
57
valori di V; si dispongono su una circonferenza; questo a patto di considerare le rette
come circonferenze di raggio innito.
Con qualche manipolazione algebrica si dimostra che:
. Il semipiano di destra Ref g 0, corrispondente ai carichi passivi, e trasformato
nel cerchio di raggio 1, j V;j 1; il semipiano di sinistra Ref g < 0, e trasformato
nella regione esterna al cerchio di raggio 1, j V;j > 1;
. Le rette verticali del piano , (r=cost.) sono trasformate nelle circonferenze di
equazione
2
2
V
;r ; 1 +r r + V;2i = 1 +1 r
(3.92)
Esse passano tutti per il punto V; = 1, che e punto singolare della trasformazione,
e hanno i centri sull'asse reale (Fig. 3.19);
. Le rette orizzontali nel piano (x=cost.) sono trasformate in circonferenze di
equazione
2 1 2
V
2 V
1
(3.93)
;r ; 1 + ;i ; x = x
Anche queste circonferenze passano tutte per il punto singolare, ma hanno i centri su
una retta parallela all'asse immaginario e passante per il punto V; = 1 (Fig. 3.20);
. Le due famiglie di circonferenze si incontrano sempre ad angolo retto (eccetto che in
V
; = 1) a causa del fatto che le rette r = costante e x = costante sono ortogonali
nel piano e a causa dell'analiticita della trasformazione (eccetto che in V; = 1).
PIANO Γ
PIANO Z
1
Imag( Γ )
Imag( Z )
5
0
0.5
0
−0.5
−5
0
2
Real( Z )
4
−1
−1
0
Real( Γ )
1
Figura 3.19 Rette verticali nel piano complesso (resistenza costante) e loro immagine nel piano complesso
V
;.
A causa della forma della legge di evoluzione del coeciente di evoluzione del coeciente di riessione su una linea, il numero complesso V; e sempre specicato in forma
polare, cioe V; = j V;j expfj arg( V;)g. La carta di Smith e fornita di scale utili per
misurare modulo e fase di V;.
Si e visto (Eq. (3.30)) che la relazione tra V; e e formalmente la stessa che sussiste
tra I; e y. Quindi la carta di Smith puo essere indierentemente considerata come:
58
3 { Circuiti contenenti linee di trasmissione
PIANO Γ
PIANO Z
5
Imag( Γ )
Imag( Z )
1
0
0.5
0
−0.5
−1
−5
0
2
Real( Z )
4
−1
0
Real( Γ)
1
Rette orizzontali nel piano complesso (reattanza costante) e loro
immagine nel piano complesso V ;, limitatamente all'interno del cerchio unitario.
Figura 3.20
. Il piano complesso ; su cui sono tracciate le famiglie di curve a resistenza costante
e quelle a reattanza costante;
. Il piano complesso ; su cui sono tracciate le curve a conduttanza costante e quelle
a suscettanza costante.
Ricordando il legame tra i due tipi di coeciente di riessione, ; = ; ;, e chiaro
che si puo usare la carta di Smith per calcolare l'ammettenza corrispondente a una data
impedenza e viceversa.
V
I
I
V
V
I
Figura 3.21
Calcolo di ammettenze e impedenze.
Data infatti l'impedenza A, la si riporta sulla carta interpretando il graticcio di curve
in termini di resistenza e reattanza; si determina cos V;A. Il punto diametralmente opposto e I;A e, leggendone le coordinate rispetto al graticcio di cerchi, interpretato questa
volta come curve a conduttanza e suscettanza costanti, si ricava il valore cercato di yA.
Questa proprieta e utile quando si analizzano circuiti comprendenti linee di trasmissione
con carichi in serie e in parallelo.
Un altro problema piu complesso, ma che si risolve con la stessa semplicita e il seguente.
Sia da determinare nel piano V;A l'insieme delle impedenze con conduttanza maggiore di
uno. In Fig. 3.22a e rappresentata con il tratteggio la regione in cui g 1, in Fig. 3.22b
si e trovata la regione simmetrica rispetto all'origine: i punti interni corrispondono a
impedenze che soddisfano alla condizione richiesta.
Vediamo ora come si risolve, tramite la carta di Smith il problema, gia risolto in 3.2,
del circuito di Fig. 3.23.
x3.7 { La Carta di Smith
(a)
59
(b)
Regioni della carta di Smith: (a) carichi con
conduttanza g 1, (b) impedenze dei carichi con g 1.
Figura 3.22
ζB
+
Vg
Zg
ZL
ZA
A
-l
l
λ
0
(a)
ζA
B
z
(b)
Figura 3.23
(a) Circuito costituito da generatore, linea di
trasmissione e carico e (b) soluzione tramite la carta di Smith.
Nota l'impedenza di carico ZL e l'impedenza caratteristica della linea Z1, calcoliamo l'impedenza normalizzata B nella sezione B. Riportiamo B sulla carta di Smith,
individuando cos V;B . Il coeciente di riessione nella sezione A e dato da
V
;A = V;B exp(;j 2kl) = V;B exp(;j 4 l)
(3.94)
Quindi V;A si trova sulla circonferenza, di centro l'origine, passante per V;B e con una
fase pari a arg( V;A);4l=. Due scale disegnate sulla periferia della carta a tarate in l=
agevolano l'operazione. Il verso di rotazione da seguire, che e quello orario, visto il segno
dell'esponente nella precedente equazione, e indicato sulla carta con la dizione Toward
Generator (verso il generatore). Tale \generatore" non ha nulla a che vedere con quello
eventualmente presente nel circuito, ma si riferisce invece al generatore driving point
impedance che si immagina posto nella sezione di interesse (A) per denirvi l'impedenza.
Trovato V;A basta leggere le coordinate di tale punto in termini del graticcio di curve
per ricavare A e quindi ZA = AZ1. Troviamo quindi
(3.95)
VA = Z Z+AZ Vg
g
A
Inoltre
V (z) = V +(z)(1 + V;(z))
(3.96)
60
dove
3 { Circuiti contenenti linee di trasmissione
V + (z) = VA+ e;jk(z+l) = 1 +VA ; e;jk(z+l)
(3.97)
;(z) = V;B e+j2kz
(3.98)
A
V
e
In conclusione
V
;jkl
V (z) = Vg Z Z+AZ 1 +e ; (e;jkz + ;B e+jkz )
g
A
A
V
V
e
(3.99)
;jkl
I (z) = Y1Vg Z Z+AZ 1 +e ; (e;jkz ; ;B e+jkz )
(3.100)
g
A
A
dove si e ricordato che
IA+ = Y1VA+
(3.101)
e
I (z) = I +(z)(1 + ;(z))) = I +(z)(1 ; ;(z)))
(3.102)
Da un punto di vista graco e immediato disegnare il diagramma di jV (z)j e jI (z)j
tenendo conto che ci si riduce a studiare l'andamento di j1 ;(z)j. Opportune scale
sono tracciate sulla carta per agevolare queste operazioni.
V
V
I
V
V
3.8 Analisi di semplici circuiti
A volte due linee di trasmissione con caratteristiche diverse vengono connesse insieme,
oppure dei carichi concentrati sono collegati in serie o in parallelo a una linea di trasmissione. Vediamo come si svolge l'analisi in questi casi.
Connessione di linee di trasmissione Consideriamo dapprima la connessione di
due linee con diversa impedenza caratteristica. Lo stesso schema circuitale adottato
Z ∞1
Z∞2
-
A+
Figura 3.24 Connessione di due linee di trasmissione con diversa impedenza caratteristica.
suggerisce che tanto la tensione quanto la corrente siano continue nella sezione A:
VA; = VA+ IA; = IA+
(3.103)
e, dividendo membro a membro, ZA; = ZA+. L'impedenza normalizzata e invece
discontinua (A; 6= A+ in quanto Z11 6= Z12).
x3.8 { Analisi di semplici circuiti
61
Per quanto riguarda le tensioni progressive, ricordando la formula generale V (z) =
V
;(z)), si trova
VA+;(1 + V;A;) = VA++(1 + V;A+)
(3.104)
ossia
VA++ = 1 + V;A;
(3.105)
V + 1 + V;
V +(z)(1 +
A+
A;
Il rapporto delle correnti progressive si ottiene anche in modo immediato:
IA++ = Y12VA++ = Y12 1 + V;A;
(3.106)
IA+; Y11VA+; Y11 1 + V;A+
Carico concentrato in parallelo Consideriamo ora il caso di una linea con un carico
concentrato Yp in parallelo. Per le leggi di Kirchho al nodo A si trova
Ip
Yp
A
Figura 3.25
Connessione di un carico in parallelo a una linea di trasmissione.
VA; = VA+
IA; = IA+ + Ip
(3.107)
YA; = YA+ + Yp
Per la continuita della tensione totale possiamo ricavare, analogamente al caso precedente, la relazione tra le componenti progressive della tensione
VA++ = 1 + ;A;
(3.108)
VA+; 1 + ;A+
e, da questa, la corrispondente per le correnti progressive
IA++ = Y12 1 + ;A;
(3.109)
IA+; Y11 1 + ;A+
Carico concentrato in serie Sia ora il caso di un carico concentrato Zs connesso in
serie.
Le leggi di Kirchho al nodo A forniscono
VA; = VA+ + Vs
IA; = IA+
(3.110)
ZA; = ZA+ + Zs
V
V
V
V
62
3 { Circuiti contenenti linee di trasmissione
Vs
Zs
AFigura 3.26
A+
Connessione di un carico concentrato in serie a una linea di trasmissione.
Per trovare il legame tra le componenti progressive di tensione e corrente, conviene
ragionare sulla seconda dalle precedenti, ottenendo per quanto riguarda la corrente:
IA++ = 1 + I;A; = 1 ; V;A;
(3.111)
IA+; 1 + I;A+ 1 ; V;A+
e, per la tensione:
VA++ = Z12 1 ; V;A;
(3.112)
V + Z 1 ; V;
A;
11
A+
Si noti che in questi casi l'uso delle leggi di Kirchho e del tutto lecito, poiche esse
sono state applicate ad una singola sezione, che per denizione e concentrata (priva di
estensione).
Linea di trasmissione come doppio bipolo Per trattare casi piu complessi puo essere
utile descrivere il tratto di linea di trasmissione come un doppio bipolo, caratterizzato
tramite la sua matrice [Z ], [Y ], [ABCD], ecc. e poi applicare i metodi discussi nel corso
di Elettrotecnica. Ricordiamo che tali matrici per un tratto di linea di trasmissione di
lunghezza l, costante di propagazione k e impedenza caratteristica Z1 sono:
Matrice [Z ] delle impedenze a vuoto
Equazioni di denizione
Risulta
V Z Z I 1
11 12
1
V2 = Z21 Z22 I2
cot kl csc kl [Z ] = ;jZ1 csc kl cot kl
(3.113)
(3.114)
Matrice [Y ] delle ammettenze di corto circuito.
Equazioni di denizione
Risulta
I Y Y V 1
11 12
1
I2 = Y21 Y22 V2
cot kl csc kl [Y ] = jY1 ;csc
kl ; cot kl
Matrice catena [ABCD]
(3.115)
(3.116)
x3.8 { Analisi di semplici circuiti
63
Equazioni di denizione
V A ;B V 1
2
I1 = C ;D I2
cos kl ;jZ sin kl 1
[ABCD] = ;jY1 sin kl cos
kl
Risulta
(3.117)
(3.118)
La corrente alla porta 2 e assunta, come di consueto, entrante nel doppio bipolo.
Sono anche utili i circuiti equivalenti a T e a di un tratto di linea, come indicati in
gura. I valori degli elementi sono
ZT 1 = ZT 2 = jZ1 tan kl2 ;
ZT 12 = ;jZ1 csc kl
(3.119)
YP 1 = YP 2 = jY1 tan kl2 ;
YP 12 = ;jY1 csc kl
(3.120)
Si osservi che gli elementi di tutte le matrici sono funzioni periodiche, come e tipico dei
circuiti a parametri distribuiti.
Z T1
Z T12
(a)
Figura 3.27
YP12
Z T2
YP1
YP2
(b)
Circuiti equivalenti (a) a T e (b) a di un tratto di linea.
64
Capitolo 4
Fenomeni dissipativi nelle linee di
trasmissione
Nel capitolo 1, quando si e iniziato lo studio delle linee di trasmissione, si e detto che
nelle strutture reali la propagazione delle onde e aetta da attenuazione. Essa e causata
sia dalle perdite nel dielettrico, che ha una conducibilita piccola ma non nulla, sia dalle
perdite nei conduttori, che hanno una conducibilita grande ma non innita.
Lo studio dettagliato di questi fenomeni richiede di risolvere le equazioni di Maxwell
nelle varie strutture di interesse. In linea con l'impostazione circuitale di questa prima
parte del corso ci limiteremo invece a una discussione qualitativa.
4.1 Perdite nel dielettrico
Il fenomeno della dissipazione di energia nel dielettrico e il piu semplice da descrivere. In
ogni dielettrico reale vi sono delle cariche libere che danno luogo a una corrente quando
viene applicato un campo elettrico.
Il materiale e caratterizzato da una conducibilita d, misurata in Siemens/metro, che
compare nella legge di Ohm in forma microscopica
J c = dE
(4.1)
dove E e il campo elettrico, J c e la densita di corrente per unita di supercie e il pedice
c sottolinea che questa corrente non e una sorgente, ma una corrente di campo, cioe
prodotta dal campo applicato.
Di solito questa corrente, che come indicato dalla (4.1) e in fase con il campo elettrico,
viene conglobata nella corrente di spostamento che e in quadratura, il che porta alla
denizione di una costante dielettrica complessa.
Ricordiamo infatti la seconda equazione di Maxwell
r H (r;t) = " @ E@t(r;t) + dE (r;t) + J e
65
(4.2)
66
4 { Fenomeni dissipativi nelle linee di trasmissione
che nel dominio spettrale diventa
r H (r;!) = j!"E (r;!) + dE (r;!) + J e (r;!)
= j! " ; j !d E (r;!) + J e (r;!)
(4.3)
= j!"~E (r;!) + J e (r;!)
In modo del tutto naturale quindi si e introdotta una permettivita dielettrica equivalente
complessa "~, la cui parte reale e l'usuale costante dielettrica e quella immaginaria e legata
alla conducibilita.
Si usa anche introdurre un angolo di perdita , denito come angolo di fase del numero
complesso "~:
d
0
00
"~ = " ; j" = "0"r 1 ; j !" " = "0 "r (1 ; j tg)
(4.4)
0 r
Quindi la relazione tra angolo di perdita e conducibilita e
tg = !"d"
(4.5)
0 r
Ovviamente, per un buon conduttore ad alta conducibilita l'angolo di perdita !
=2.Osserviamo inne che quando si vuole studiare l'andamento in frequenza di "~ occorre
ricordare che sia "r , sia d sono funzioni della frequenza.
Si e visto nel capitolo 1 che le perdite nel dielettrico sono descritte in termini circuitali
tramite la conduttanza per unita di lunghezza G . Il calcolo di questa quantita, come del
resto di tutti i parametri per unita di lunghezza, a partire dalla geometria della linea
di trasmissione e dai parametri sici dei materiali richiede che si risolvano le equazioni
di Maxwell per la congurazione in questione. A partire dalla conoscenza dei campi
si puo risalire ai valori dei parametri delle linee. Questo procedimento verra illustrato
sommariamente nella prossima sezione, in cui si analizzano le perdite nei conduttori. Le
formule che permettono di calcolare G per qualche esempio di linea sono riportate nella
sezione 4.3.
4.2 Perdite nei conduttori
La permettivita dielettrica complessa introdotta prima e in grado di descrivere anche
un buon conduttore. In realta, in conduttori come il rame a frequenza no nel campo
delle onde millimetriche la corrente di spostamento e trascurabile rispetto a quella di
conduzione per cui la "~ e assunta puramente immaginaria.
In una linea di trasmissione in cui i conduttori si assumono perfetti, il campo elettromagnetico e diverso da zero solo nel dielettrico: infatti, nei conduttori il campo e
identicamente nullo. In queste condizioni, sulla supercie dei conduttori scorre una corrente elettrica che e strettamente legata al campo elettromagnetico. Si tratta, come
detto, di una corrente superciale la cui densita per unita di lunghezza J , misurata
lungo il contorno della sezione trasversale del conduttore, e pari in modulo al valore
del campo magnetico nei punti del dielettrico adiacenti al conduttore stesso, vedi gura
(4.1). La sua direzione e ortogonale al campo magnetico.
Se ora immaginiamo che la conducibilita del materiale sia molto grande ma nita, si
puo dimostrare risolvendo le equazioni di Maxwell in queste condizioni che la corrente
x4.2 { Perdite nei conduttori
67
Jσ
ds
Conduttore perfetto e corrente che scorre sulla sua supercie. La
sua densita J e la corrente che scorre attraversando l'elemento di linea ds.
Figura 4.1
elettrica non e piu connata alla sola supercie ma si distribuisce anche all'interno, con
una densita per unita di supercie che decade in modo circa esponenziale verso l'interno
del conduttore.
Anche il campo magnetico \penetra" all'interno del conduttore, pur essendo caratterizzato dallo stesso decadimento esponenziale. Questo fenomeno ha due conseguenze:
a causa della presenza nel metallo di un campo elettrico e di una densita di corrente
elettrica, in fase tra loro per la (4.1), si ha dissipazione di energia.
il campo magnetico nel conduttore da luogo a un usso autoconcatenato che si
descrive tramite un'induttanza interna, da sommare a quella esterna che tiene conto
del usso del campo nel dielettrico.
Un caso che si riesce a studiare semplicemente e quello di una linea di trasmissione
planare, riportata in gura (4.2).
z
x
w
y
h
d
Figura 4.2
Linea di trasmissione planare.
Supponiamo che w=h >> 1, in modo da poter trascurare le variazioni con y di campi
e corrente, che dunque risultano solo dipendere da z e da x.
Qui ci occupiamo solo della dipendenza da x, in quanto vogliamo ricavare i parametri
per unita di lunghezza della linea, sulla base dei quali poi si ricavera la dipendenza dalla
68
4 { Fenomeni dissipativi nelle linee di trasmissione
coordinata longitudinale z. Si puo dimostrare, risolvendo le equazioni di Maxwell, che la
densita di corrente per unita di supercie nel conduttore di sinistra e diretta lungo zb ed
e data dall'espressione
h i
cosh Th hx ; 1
I
Jz (x) = w T sinh (Th)
(4.6)
dove T = (1 + j ) = e I=w e la densita di corrente per unita di lunghezza lungo y che
scorre complessivamente nel conduttore . Nel conduttore di destra la corrente e opposta.
La gura (4.3) riporta in un graco tridimensionale la dipendenza della densita di
corrente per unita di supercie Jz (x;!) dalla profondita normalizzata x=h e dal parametro
h=. Questo equivale a indicare la dipendenza dalla frequenza, perche si vedra tra poco
(g.(4.7b)) che h= e funzione della frequenza. Inoltre la densita puntuale Jz (x;!) e
e stata normalizzata alla densita di corrente media I=(wh). Vediamo che se h= ! 0
la corrente e distribuita uniformememnte nel conduttore. Viceversa, se h= e grande,
la corrente tende a concentrarsi lungo l'interfaccia tra il metallo e il dielettrico. In
|Jz|
6
4
2
0
0
4
3
h/δ
0.5
2
1
0 1
x/h
Dipendenza della densita
di corrente Jz dalla profondita x e dalla
frequenza.
Figura 4.3
queste condizioni si puo' dimostrare che Jz (x) decade esponenzialmente al crescere di x
verso l'interno del conduttore e il tasso di decadimento e ssato dal parametro , detto
profondita di penetrazione per eetto pelle. Infatti la corrente uisce sostanzialmente in
una sottile pellicola adiacente all'interfaccia tra conduttore e dielettrico. Si dimostra che
l'espressione di e
s
2
= !
(4.7)
x4.2 { Perdite nei conduttori
69
da cui si vede che e inversamente proporzionale alla radice quadrata della frequenza e
della conducibilita. La tabella (4.1) riporta alcuni esempi di conduttori comuni.
Tabella 4.1
Materiale
[S/m]
Alluminio
Argento
Cromo
Grate
Nickel
Oro
Ottone
Rame
Stagno
Zinco
3,54 107
6,15 107
3,8 107
1,0 105
1,3 107
4,50 107
1,59 107
5,80 107
0,870107
1,86 107
Caratteristiche di alcuni buoni conduttori
Profondita di penetrazione
f [m Hz ] 50 Hz 1 KHz 1 MHz 3 GHz
[cm] [mm] [mm] [m]
0,085
1,19
2,7
0,085
1,6
0,064
0,90 2,03 0,064
1,2
0,081
1,15
2,6
0,081
1,5
1,59
22,50 50,3
1,59
29
0,014
0,19
4,4
0,014 0,26
0,075
1,06 2,38 0,075
1,4
0,126
1,78 3,98 0,126
2,3
0,066
0,93
2,1
0,066
1,2
0,171
2,41 5,41 0,171 3,12
0,117
1,65 3,70 0,0117 2,14
1
2
1
2
A partire dall'espressione della densita di corrente e dei campi e possibile calcolare
l'impedenza superciale del metallo, denita come il rapporto tra il campo elettrico Ez
all'interfaccia x = 0 e la densita di corrente per unita di lunghezza lungo y (I=w). Il
campo elettrico Ez (x = 0) si trova dalla equazione (4.6) e dalla legge di Ohm in forma
microscopica:
Ez (x = 0) = 1 Jz (x = 0) = T wI coth (Th)
(4.8)
Quindi l'impedenza superciale, per unita di lunghezza nella direzione z e per unita di
larghezza nella direzione y, vale
Z = R + j!Li = 2 T coth (Th) =
"
#
"
#
(4.9)
1
+
j
h
h
=2
coth (1 + j ) = 2Rs (1 + j ) coth (1 + j ) dove si e introdotto il parametro Rs
s
1
(4.10)
Rs = = !
2
70
4 { Fenomeni dissipativi nelle linee di trasmissione
detto resistenza superciale, che in realta coincide con la parte reale di Z solo se h >> .
Questa resistenza superciale dipende dalla frequenza e si misura in . Vedremo al
termine di questo capitolo che e consuetudine esprimere il valore numerico in \
per
quadro". (
= tu). Inne il fattore 2 nella equazione (4.9) tiene conto dell'esistenza di
due conduttori identici. Se il conduttore ha la larghezza w, l'impedenza per unita di
lunghezza lungo z vale Z =w, poiche gli elementi di conduttore sono in parallelo.
E da notare che questa impedenza per unita di lunghezza coincide con l'impedenza serie
del circuito equivalente di un tratto elementare z di linea di trasmissione (vedi gura
1.3) a meno dell'induttanza esterna, legata al campo magnetico presente nel dielettrico.
La parte immaginaria di Z nell'equazione (4.9) e proporzionale all' induttanza interna,
associata al campo magnetico presente all'interno del metallo.
15
J z (x )
I (wh ) 10
5
0
0
0.2
0.4
0.6
0.8
1
x/h
Figura 4.4
Andamento di Jz (x) per h= = 10.
L'espressione della densita di corrente indotta (4.6) vale per ogni frequenza di lavoro.
Supponiamo ora di far crescere la frequenza, in modo che la profondita di penetrazione
diventi sempre piu piccola. In questo caso h= >> 1 e il conduttore si comporta come
se fosse di spessore innito. L'espressione (4.6) si semplica e diventa un esponenziale,
(4.11)
Jz (x) wI T exp (;Tx) = wI (1 + j ) exp ; (1 + j ) x
(vedi gura (4.4)), mentre la (4.9) si riduce a
Z = R + j!Li 2wRs (1 + j )
(4.12)
x4.2 { Perdite nei conduttori
71
qui scritta per il caso di un conduttore di larghezza w.
All'altro estremo di frequenza molto bassa, la profondita di penetrazione e grande
e h= << 1. In queste condizioni la corrente scorre con densita quasi uniforme entro
tutta la sezione trasversale del conduttore (vedi gura (4.5)) e l'impedenza per unita
di lunghezza si ricava da (4.9) ricordando lo sviluppo della cotangente iperbolica per
argomento piccolo
1 z
coth (z) (4.13)
= z + 3:
1.025
J z (x )
I (wh )
1.02
1.015
1.01
1.005
1
0.995
0
0.2
0.4
0.6
0.8
1
x/h
Figura 4.5
Andamento di Jz (x) per h= = 0: 5.
Sostituendo nella equazione (4.9) si trova
"
#
(1
+
j
)
1
h
2
Z = w h (1 + j ) + 3 (1 + j ) =
(4.14)
!
!
1
2
h
1
1
!h
= 2 hw + j 3 2w = 2 hw + j 3 w = R + j!Li
dove si e usata l'espressione di (eq. (4.7)) e il fattore 2 si riferisce sempre al fatto che
vi sono due conduttori identici che contribuiscono al risultato.
Notiamo allora che in queste condizioni di bassa frequenza la resistenza per unita di
lunghezza vale
1 =R
R = wh
(4.15)
dc
72
4 { Fenomeni dissipativi nelle linee di trasmissione
per ciascun conduttore. Dato che wh e l'area della sezione trasversale del conduttore
questo risultato coincide con il valore di resistenza in corrente continua.
Ad alta frequenza, invece, la resistenza per unita di lunghezza e data, per ciascun
conduttore, dalla (4.12)
1
R = Rws = w
(4.16)
3
2.5
2.5
2
2
dc
3
Z /R
1.5
s
Zs / Rs
Confrontando le equazioni (4.15) e (4.16) possiamo ricavare la seguente interpretazione
del parametro : in condizioni di alta frequenza, cioe se lo spessore del conduttore e
grande rispetto alla profondita di penetrazione, la resistenza equivalente per unita di
lunghezza e quella che si otterrebbe in continua se la corrente scorresse con densita
costante in uno strato di spessore pari a .
In gura (4.6a) e riportato l'andamento dell'impedenza per unita di lunghezza normalizzata alla resistenza superciale Rs in funzione dello spessore h=. La gura (4.6b)
riporta l'andamento della stessa impedenza normalizzata rispetto alla resistenza in continua Rdc = 1= (wh). Notiamo che a bassa frequenza in gura (4.6a) la resistenza
1.5
1
1
0.5
0.5
0.5 1 1.5 2 2.5 3
Spessore normalizzato h/δ
(a)
0
0.5 1 1.5 2 2.5 3
Spessore normalizzato h/δ
(b)
Impedenza serie normalizzata della linea planare. Linea continua:
parte reale; linea tratteggiata: parte immaginaria. L'impedenza di normalizzazione e la resistenza superciale Rs in (a) e la resistenza in continua Rdc in
(b).
Figura 4.6
normalizzata diventa molto grande. In realta, la resistenza non normalizzata tende al
valore nito Rdc (come e evidente dalla gura (4.6b)) mentre la resistenza superciale Rs
tende a zero, come illustrato in gura (4.7a), dove come frequenza di normalizzazione si
e assunta quella per cui = h. Per ottenere una grandezza normalizzata, la resistenza
superciale e stata moltiplicata per la quantita h. Sempre in funzione della stessa frequenza normalizzata, la gura (4.7b) riporta il graco della profondita di penetrazione
, normalizzata allo spessore h del conduttore. Per quanto riguarda la reattanza serie,
dall'equazione (4.14) si vede che essa tende a zero per ! ! 0.
In gura (4.8) e riportato il graco della parte reale dell'impedenza serie per unita di
lunghezza, normalizzata alla resistenza in continua Rdc . Vediamo che gli asintoti relativi
al comportamento a bassa e ad alta frequenza si incontrano per h= = 1. Dato che e
x4.3 { Parametri di perdita di alcune linee di trasmissione
3
2.5
2.5
2
2
δ/h
γ h Rs
3
1.5
1.5
1
1
0.5
0.5
0
0.0
2.5
5.0
7.5
Frequenza normalizzata
(a)
0
0.0
10
73
2.5
5.0
7.5
Frequenza normalizzata
(b)
10.
(a) Resistenza superciale normalizzata Rsh.
(b) Profondita di penetrazione normalizzata =h. La frequenza di normalizzazione usata in ascissa e quella per cui
= h.
Figura 4.7
funzione della frequenza, questa condizione determina la frequenza fd
1
(4.17)
fd = h
2
Questa frequenza, detta di demarcazione, separa il regime di bassa frequenza da quello
di alta frequenza.
La gura (4.9) riporta un graco dell'induttanza interna, normalizzata rispetto al
valore in continua, in funzione dello spessore normalizzato h=. Dato che dipende da
!, anche questa induttanza e funzione della frequenza. Notiamo che l'induttanza interna
e sempre piccola rispetto a quella esterna. Infatti l'induttanza esterna e data da
Le = d
(4.18)
w
mentre l'induttanza interna a frequenza zero e
Li0 = 31 w h
(4.19)
e ancora piu piccola al crescere della frequenza. Dato che in genere d >> h, l'induttanza
interna risulta trascurabile rispetto a quella esterna.
4.3 Parametri di perdita di alcune linee di trasmissione
4.3.1 Cavo coassiale
Perdite nel dielettrico
G = 2Dd
log
d
(4.20)
74
4 { Fenomeni dissipativi nelle linee di trasmissione
3
R/R
dc
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
Spessore normalizzato h/δ
3
Parte reale dell'impedenza serie per unita
di lunghezza, normalizzata a Rdc . Sono anche disegnati i
comportamenti asintotici, al ne di denire la frequenza di
demarcazione.
Figura 4.8
Perdite nel metallo
Bassa frequenza
Resistenza per unita di lunghezza:
"
Induttanza interna:
#
R = d12 + D2 ;1 D2 1
e
c 4
" 2 #;2 " 2
D #
D
D
Li = 4 1 ; D
De ; 1 ; 2 log De
e
Media frequenza
p p f
Rsj 2J0 de Rsj 2K0 D
+
f
R + j!Li =
dJ1 de
DK1 D
3
2
dove
1
2
(4.21)
(4.22)
(4.23)
f = j pD
de = j pd ;
D
2s
2s
e J0, J1 sono funzioni di Bessel di prima specie e K0, K1 sono funzioni di Bessel modicate.
Alta frequenza
3
2
1
2
x4.3 { Parametri di perdita di alcune linee di trasmissione
75
1
/i
/i 0
0.8
0.6
0.4
0.2
0
0
2
4
6
8
Spessore normalizzato h/δ
10
Induttanza interna di una linea planare, normalizzata
rispetto al valore in continua, in funzione dello spessore normalizzato
h=.
Figura 4.9
d
D
De
Figura 4.10
Cavo coassiale.
1 1 1
+
j
R + j!Li = Rs d + D
(4.24)
Questa formula ha una semplice interpretazione. Quando l'eetto pelle e ben sviluppato, l'impedenza serie e la stessa che si avrebbe se tutta la corrente scorresse con
densita costante entro uno strato di spessore pari alla profondita di penetrazione . La
\larghezza equivalente" del conduttore vale 1=d per il conduttore interno e 1=D per
quello esterno, quantita che sono le circonferenze dei conduttori stessi. La stessa interpretazione era gia stata data in connessione con l'equazione (4.16) nel caso della linea a
piani paralleli.
4.3.2 Linea bilare
Perdite nel dielettrico
G=
d cosh;1 D
d
(4.25)
76
4 { Fenomeni dissipativi nelle linee di trasmissione
d
D
Figura 4.11
Perdite nel metallo
Bassa frequenza
Linea bilare.
R = d22 Li = 4
(4.26)
p Rsj 2J0 de
R + j!Li =
dJ1 de
(4.27)
Media frequenza (se D >> d)
c
3
2
dove
de = j pd
2s
e J0, J1 sono funzioni di Bessel di prima specie.
Alta frequenza
+j
R + j!Li = 2Rs 1d
3
2
(4.28)
Per capire inne per quale motivo la resistenza superciale Rs si misura in facciamo
riferimento alla gura (4.12) dove si considera un prisma a base quadrata di lato w e
profondita pari a .
δ
J
w
w
Figura 4.12
Prisma a base quadrata di lato w e profondita pari a .
Abbiamo gia detto che l'impedenza e la stessa che si avrebbe con un usso uniforme
di corrente entro lo spessore . In tali condizioni, la resistenza superciale vale
w = 1
R = Sl = w
x4.3 { Parametri di perdita di alcune linee di trasmissione
77
che e indipendente dalle dimensioni del quadrato. Quindi ogni quadrato, con lato
arbitrario, ha la stessa resistenza.
78
Capitolo 5
Linee di trasmissione con perdite
5.1 Soluzione delle equazioni delle linee
Dopo aver esaminato in dettaglio la tecnica di analisi di circuiti che comprendono linee
di trasmissione ideali, cioe senza perdite, riprendiamo le equazioni complete delle linee
reali e vediamo qual e l'eetto dei parametri R (resistenza per unita di lunghezza dei
conduttori) e G (conduttanza per unita di lunghezza legata alle perdite nel dielettrico).
Le equazioni in questione sono
; @t@ v(z;t) = R i(z;t) + L @t@ i(z;t)
(5.1)
@
@
; @t i(z;t) = G v(z;t) + C @t v(z;t)
Prendendo la trasformata di Fourier di ambo i membri si ottengono le equazioni delle
linee reali nel dominio spettrale, ossia
; dzd V (z;!) = (R + j! L) I (z;!)
(5.2)
; dzd I (z;!) = (G + j! C ) V (z;!)
Si potrebbe ripetere in questo caso l'analisi fatta per le linee ideali ma piu semplice e
ricorrere all'articio di introdurre una induttanza e una capacita per unita di lunghezza
complesse
R = L ; jR
Lc = L + j!
!
G = C ; jG
Cc = C + j!
!
79
(5.3)
80
5 { Linee di trasmissione con perdite
τs
L ∆z
τp
R ∆z
G∆z
C∆z
Figura 5.1
Costanti di tempo dei gruppi RL e
RC di un tratto elementare di linea di trasmissione
in modo che le equazioni delle linee reali assumono la forma
; dzd V (z;!) = j! Lc I (z;!)
; dzd I (z;!) = j! Cc V (z;!)
(5.4)
identica a quella delle linee reali. E quindi suciente prendere la soluzione relativa al
caso ideale e \prolungarla analiticamente" da valori reali di L e C a valori complessi (Lc
e Cc). Notiamo che le induttanze e capacita equivalenti Lc e Cc si possono scrivere
1
Lc = L 1 ; j !
s
Cc = C 1 ; j !1
!
(5.5)
p
dove s = L=R e p = C =G si possono interpretare come le costanti di tempo del gruppo
RL in serie e RC in parallelo, rispettivamente, nel circuito equivalente di un tratto
elementare di linea, riportato in gura (5.1).
Ovviamente le costanti di tempo s , p tendono all'innito per una linea ideale.
Le espressioni di tensione e corrente su una linea con perdite sono dunque dati da
V (z;!) = V0+(!) e;jkz + V0;(!) e+jkz
(5.6)
+
;
jkz
;
+
jkz
I (z;!) = Y1V0 (!) e ; Y1V0 (!) e
dove la costante di propagazione (complessa) e
q
k = ! LcCc
(5.7)
x5.1 { Soluzione delle equazioni delle linee
e l'impedenza caratteristica (complessa) e
81
s !;1
Y1 = Z1 = LC c
(5.8)
1
c
Conviene esplicitare queste due espressioni in modo diverso a seconda del valore della
frequenza di lavoro:
per bassa frequenza
q
k = ;(R + j!L)(G + j!C )
(5.9)
s
j!C
Y1 = Z1 = RG +
+ j!L
1
per alta frequenza
s !
u
p v
u
1
R
G
1
t
2
k = ! L ; j ! C ; j ! = ! LC 1 ; j ! 1 ; j !
s
v
s v
u
u
1
G
u
1
;
j
u C ; j!
!p t
Y1 = Z1 = t
= LC u
R
L;j!
1
1 ; j !1s
p
(5.10)
Osserviamo subito che, anche se la soluzione (5.7) vale per qualunque valore di R;L;C ;G ,
il caso di interesse pratico e quello in cui Lc e Cc hanno parti immaginarie molto piccole.
Analizziamo ora il signicato delle (5.7) quando k e Y1 sono complessi. Per quanto
riguarda la costante di propagazione, il radicando nella (5.7) e dato dal prodotto di due
fattori con fase compresa tra ;=2 e 0, e quindi ha fase compresa tra ; e 0:
; < arg(k2) 0
(5.11)
Estraendo la radice quadrata si ottengono i valori k = ( ; j) con 0 e 0.
Per accertare se k appartiene al quarto o al secondo quadrante basta farep il limite per
R;G ! 0, che e il caso della linea ideale, in cui avevamo scelto k = ! LC e quindi
Refkg > 0, vedi gura (5.2). Per continuita, quindi, nel caso di linea con perdite, k
appartiene al quarto quadrante. Cio signica anche che Imfkg < 0: questa scelta e
dunque coerente con il fatto che l'onda progressiva si attenua per z crescente.
Per quanto riguarda l'ammettenza caratteristica, il radicando nella (5.8) appartiene al
semipiano di destra: per continuita con il caso di linea senza perdite, scegliamo Y1 con
parte reale positiva, vedi gura (5.3).
Del resto si puo osservare che, essendo Y1 l'ammettenza di ingresso di una linea
seminnita, essa deve avere parte reale positiva trattandosi di una rete passiva.
A volte, in alcuni testi, invece della costante di propagazione k = ; j, si introduce
= jk = + j
82
5 { Linee di trasmissione con perdite
k2
k
−k
k2
Figura 5.2
k
Piano complesso k2 e piano complesso k
Y∞2
Y∞
Y∞2
Y∞
Figura 5.3
Piano complesso Y12 e piano complesso Y1
per cui, per esempio, l'espressione generale della tensione su una linea e
V (z) = V0+ e;z + V0; ez
Inoltre gli elementi delle matrici [Z ];[Y ];[ABCD], di un tratto di linea, date in (3.114)
- (3.118) diventano funzioni iperboliche dell'argomento l, invece che funzioni trigonometriche circolari di kl. Questa scelta si propone in modo naturale quando le equazioni
delle linee (1.12) vengono risolte con le trasformate di Laplace anziche di Fourier. Noi
useremo sempre esclusivamente la costante k.
Per comprendere meglio il signicato della soluzione delle equazioni delle linee reali, ricaviamo l'andamento in funzione del tempo di tensione e corrente corrispondenti
al primo termine delle (5.7) che, nel caso delle linee ideali, rappresentava un'onda progressiva. Interpretiamo le (5.3) come equazioni tra fasori, per cui vale la formula di
antitrasformazione
v+(z;t) = RefV +(z;!) ej! t g
(5.12)
otteniamo l'espressione dell'onda progressiva di tensione nella forma
v+(z;t) = Refj V0+ j ej arg(V ) e;j( ;j )z ej! t g
(5.13)
;
z
+
+
= j V0 j cos(!0t ; 0z + arg(V0 )) e
0
+
0
0
0
0
0
x5.1 { Soluzione delle equazioni delle linee
v + ( z0 , t )
V 0+
83
T
t
Figura 5.4
Evoluzione della tensione progressiva in funzione del tempo
v + ( z, t0 )
V 0+
λ
z
Figura 5.5
Evoluzione della tensione progressiva in funzione dello spazio
e, per la corrente progressiva:
i+ (z;t) = Refj Y1 j ej arg(Y1 ) j V0+ j ej arg(V ) e;j( ;j )z ej! t g
+
0
=
j Y1 jj V0+
0
0
0
j cos(!0t ; 0z + arg(Y1) + arg(V0+)) e;0 z
(5.14)
assumendo k0 = k(!0 ) = 0 ; j0, dove si sono messe in evidenza le parti reale e
immaginaria della costante di propagazione complessa.
In gura (5.4) si riporta il graco dell'evoluzione della tensione progressiva in una
sezione specica della linea z = z0 in funzione del tempo. Notiamo che e identico a
quello analogo di gura (1.10) relativo a una linea senza perdite.
In gura (5.5) si riporta invece la distribuzione complessiva della tensione progressiva
sulla linea in un istante ssato t = t0.
Dall'esame delle (5.14) e (5.15) possiamo concludere che:
84
5 { Linee di trasmissione con perdite
V + ( z ,ω )
V0+
e −1
z
α0
Evoluzione della tensione progressiva in
funzione dello spazio per una linea di trasmissione
dissipativa
Figura 5.6
Il primo termine delle (5.7) rappresenta eettivamente un'onda che si muove nel
verso delle z crescenti con velocita di fase
vf = !0 = Re!f0k g
(5.15)
0
0
Si noti che vf non e costante al variare di !0, poiche Refk0 g non e funzione lineare
della frequenza.
L'ampiezza dell'onda diminuisce esponenzialmente al crescere di z, come ci si aspetta
intuitivamente visto il carattere dissipativo della linea di trasmissione in esame.
L'inverso della parte immaginaria della costante di propagazione (0 ) e la distanza
che da luogo a una riduzione del fattore 1=e = 0: 36788 = 8: 68589 dB di tensione e
corrente (vedi g.(5.6)).
La lunghezza d'onda, denita come al solito come periodo spaziale dell'onda, e data
da
= 2 = Re2fk g
(5.16)
0
0
La corrente e proporzionale alla tensione ma presenta rispetto a questa uno sfasamento pari a arg(Y1). Si noti che Y1 non e costante rispetto alla frequenza.
Le unita di misura di 0 e 0 sono
0 ! [rad=m]
0 ! [Np=m] oppure [dB=m]
Ricordiamo, per quanto riguarda 0 , che essendo
+ (z ) j
; z
ln jj VV +(0)
j = ln e = ;0 z
0
(5.17)
x5.1 { Soluzione delle equazioni delle linee
85
v − (z , t 0 )
V0−
z
Figura 5.7
Evoluzione della tensione regressiva in funzione dello spazio
risulta naturale esprimere 0 in [Np/m]. Esprimendo invece il rapporto di tensione
in dB abbiamo
+
20 log10 j V +(z) j = 20 log10 e; z = ;0 z 20 log10 e def
= ;0dB z
(5.18)
j V (0) j
Quindi il fattore di conversione per la costante di attenuazione e 20 log10 e = 8: 68589.
0
Le stesse considerazioni si possono svolgere per il secondo termine della (5.7) che
rappresenta un'onda regressiva identica a quella progressiva (a parte ovviamente il verso
di propagazione) a causa dell'uniformita della linea di trasmissione.
Le espressioni temporali di tensione e corrente per l'onda regressiva sono
v;(z;t) = j V0; j cos(!0t + 0z + arg(V0;)) e z
(5.19)
;
;
;
z
i (z;t) = ; j Y1 jj V0 j cos(!0t + 0z + arg(Y1) + arg(V0 )) e
Il graco della distribuzione della tensione regressiva sulla linea ad un istante specico
t = t0 e riportato in gura (5.7).
La presenza in queste espressioni di un esponenziale che cresce al crescere di z sembra
apparentemente in contraddizione con il carattere dissipativo della linea di trasmissione
che stiamo analizzando. In realta, non bisogna dimenticare che l'onda regressiva, una
volta eccitata, si propaga nella direzione ;z^, per cui, nell'evoluzione naturale del fenomeno, l'ampiezza dell'onda regressiva diventa sempre piu piccola. La stessa cosa si puo
vedere introducendo il riferimento in cui l'onda appare in quiete, z = ;vf t = ;!0 t=0;
in tale riferimento l'ampiezza decade come expf;!0 0t=0 g. Nella gura (5.8) l'onda
progressiva si deve intendere eccitata nella sezione A da un generatore mentre l'onda
regressiva si eccita nella sezione B in cui si trova il carico disadattato.
In gura (5.9) sono riportati i graci spazio-temporali delle tensioni progressiva e
regressiva. Si puo osservare che le creste sono parallele tra loro. Esse sono parallele alle
rette z = vf t (onda progressiva) e z = ;vf t (onda regressiva).
0
0
86
5 { Linee di trasmissione con perdite
+
Zg
ZL
g
A
B
Linea di trasmissione con perdite
chiusa su una impedenza di carico generica
Figura 5.8
5
v(z,t) regr.
v(z, t) progr.
1
0
0
−5
−1
2
2
1
z/λ
1
0
0
Figura 5.9
1
2
t/T
3
z/λ
0
0
1
2
3
t/T
Graci spazio-temporali delle tensioni progressiva e regressiva
Abbiamo visto nel capitolo 3 che nell'analisi di circuiti comprendenti linee di trasmissione e utile introdurre il concetto di coeciente di riessione
;
V ;(z ) = V (z )
(5.20)
V +(z)
Nel caso di linee con perdite, la legge di trasformazione di V ; diventa
V ;(z ) =V ;(0) ej 2kz =V ;(0) ej 2z e2z
(5.21)
Possiamo concludere che muovendosi dal carico verso l'ingresso della linea non solo
la fase del coeciente di riessione diminuisce, ma anche il suo modulo, per cui V ;
descrive nel suo piano complesso una spirale logaritmica con l'origine come polo, vedi
gura (5.10).
Per questo possiamo aermare che l'impedenza di ingresso di una linea reale seminnita, qualunque sia la sua impedenza di carico, coincide con l'impedenza caratteristica
della linea stessa. Questo fatto giustica l'uso del simbolo Z1 .
Il risultato appena trovato si spiega anche in modo intuitivo. Il fatto che l'impedenza di
ingresso di un tratto di linea sia diverso da Z1 signica soltanto che un'onda progressiva
eccitata in A, giunta in B produce un'onda regressiva che, a sua volta, arriva in A con
una ampiezza ancora signicativa. Se il prodotto 0 l della costante di attenuazione per
la lunghezza della linea e molto grande (0l ! 1 ), l'onda regressiva in A e trascurabile
e la linea appare adattata. In realta la potenza e solo in parte trasferita al carico: il resto
e dissipato nella linea.
x5.2 { Calcolo del usso di potenza
(a )
Figura 5.10
(b )
87
(c )
Andamento del modulo di V ; al variare di = = 0: 2 (a), 0: 1 (b), 0 (c)
Si e visto nel capitolo 3 che quando una linea ideale e chiusa su un carico reattivo, si
forma su di essa un'onda puramente stazionaria. In queste condizioni il usso di potenza
netta e nullo. Ci chiediamo ora se anche su una linea di trasmissione con perdite, chiusa
su un carico reattivo, si possa formare un'onda puramente stazionaria. La risposta e
negativa per l' impossibilita algebrica di scrivere l'espressione della tensione sulla linea
come prodotto di una funzione di t e di una funzione di z. Vi e anche una spiegazione
sica legata al fatto che in ogni sezione della linea esiste un usso di potenza attiva anche
se il carico e senza perdite. Questa potenza, naturalmente, si dissipa nel tratto compreso
tra la sezione considerata e quella di carico.
5.2 Calcolo del usso di potenza
La formula generale che permette di valutare la potenza transitante in una sezione di
una linea qualsiasi e stata ricavata nel capitolo 3 ed e qui riportata per comodita:
n h
i
o
P (z) = 21 RefV (z) I (z)g = 12 G j V +(z) j2 ; j V ;(z) j2 + 2B I mfV +(z)V ;(z)g =
(5.22)
n
h
i
o
1
= 2 j V +(z) j2 G 1; jV ;(z) j2 + 2B I mfV ;(z)g
dove l'ammettenza caratteristica e Y1 = G + jB .
Una linea si dice con piccole perdite quando B << G per cui la parte immaginaria
dell'ammettenza caratteristica puo essere trascurata. La potenza transitante si puo allora
calcolare con la formula valida rigorosamente solo nel caso di linee senza perdite:
h
i
P (z) = 21 j V +(z) j2 G 1; jV ;(z) j2
(5.23)
Per quanto rigurda la costante di propagazione, notiamo che essa compare sempre moltiplicata per la lunghezza del tratto di linea, quindi si tratta di esaminare la quantita
l. Se questa e piccola (l << 1) allora l'eetto delle perdite puo essere totalmente
trascurato poiche
e;l ' 1
(5.24)
88
5 { Linee di trasmissione con perdite
+
Zg
ZL
g
A
Figura 5.11
B
Tratto di linea con perdite chiuso su una generica impedenza di carico
Quando la precedente condizione non e soddisfatta si deve tenere conto delle perdite per
cui sia j V +(z) j sia jV ;(z) j sono eettivamente delle funzioni di z e quindi anche la
potenza transitante.
Applichiamo questa formula al circuito di gura (5.11) Indichiamo con PA (PB ) la
potenza netta transitante nella sezione A(B ); ovviamente, PB e anche la potenza dissipata
dal carico ZL. Il rapporto PB =PA si trova immediatamente usando due volte, nella sezione
B e poi nella sezione A, l'equazione (5.23) precedente:
PB = 21 G j VB+ j2 (1; jV ;B j2) = e;2l 1; jV ;B j2
(5.25)
PA 21 G j VA+ j2 (1; jV ;A j2 )
1; jV ;A j2
dove si e fatto uso della relazione
j VB+ j=j VA+ j e;l
(5.26)
Inoltre
jV ;A j=jV ;B j e;2l
(5.27)
Se l'impedenza di carico ZL coincide con l'impedenza caratteristica della linea (linea
adattata),V ;B = 0 e il rapporto PB =PA coincide col fattore exp(;2l) che viene denito
attenuazione nominale.
Se l'impedenza di carico e arbitraria (linea disadattata) il rapporto PB =PA si riduce,
poiche la frazione, che esprime l'incremento di attenuazione dovuto al disadattamento,
e sempre minore di 1. Naturalmente, per il principio di conservazione dell'energia, la
potenza dissipata nel tratto AB della linea si trova da
PB (5.28)
Pdiss = PA 1 ; P
A
Spesso l'espressione (5.25) si esprime in decibel:
PB V
2
V
2
=
;
(5.29)
dB l + (1; j ;B j )dB ; (1; j ;A j )dB
PA dB
La carta di Smith e corredata di una scala che consente di valutare rapidamente l'incremento di attenuazione dovuto al disadattamento.
Inne se l 1, la linea, pur avendo perdite, dissipa una potenza trascurabile rispetto
a quella transitante e quindi PB =PA 1 come si avrebbe rigorosamente nel caso di linea
priva di perdite.
x5.3 { Espressioni approssimate di costante di propagazione e impedenza caratteristica89
5.3 Espressioni approssimate di costante di propagazione e impedenza caratteristica
Abbiamo gia detto che in tutte le linee di trasmissione di interesse pratico, la resistenza
R e la conduttanza G sono dei parametri "parassiti" che si cerca di mantenere al livello
piu basso possibile. In tal caso, per il calcolo della costante di propagazione k e dell'impedenza caratteristica Z1 si possono usare delle formule approssimate. Supponendo che
(approssimazione di alta frequenza)
R 1
!L
G 1
!C
e ricordando gli sviluppi in serie troncati al primo ordine (validi per j x j<< 1):
(1 + x) ' 1 + 12 x
(5.30)
1
2
(1 + x); ' 1 ; 12 x
(5.31)
1
2
si trova da 5.11
e quindi
p s
k = ! LC 1 ; j !RL 1 ; j !GC
p 1 R G ' ! LC 1 ; j 2 !L + !C
(5.32)
p
' ! LC
0 s
s 1
C
1
' 2 @R L + G LC A
(5.33)
Per quanto riguarda l'impedenza caratteristica, sempre nell'approssimazione di alta frequenza, si trova dalla (5.11)
s v
u
u 1 ; j !RL
L
Z1 = C t
'
1 ; j !GC
s R G 1
L
' C 1 ; j 2 !L ; !C
(5.34)
90
5 { Linee di trasmissione con perdite
Si vede che i termini R=!L e G =!C , oltre a essere piccoli per ipotesi, si sommano
nell'espressione di ma si sottraggono in quella di Z1.
A bassa frequenza, invece, conviene fare riferimento alle espressioni (5.10), in cui si
assume
!L << 1
!C << 1
R
G
Per la costante di propagazione si trova
p s ! L ! L k = ;j RG 1 + j R 1 + j G '
!L !L p
1
' ;j RG 1 + j 2 R + G
(5.35)
Da questa equazione ricaviamo le espressioni di e 0s
s 1
!
R
GA
(!) = 2 @C G + L R
p
(!) = RG
(5.36)
Notiamo che (!) e lineare sia ad alta frequenza sia a bassa frequenza anche se la
pendenza delle due rette e diversa. Un semplice calcolo mostra che la pendenza a bassa
frequenza e maggiore di quella ad alta frequenza se p > s , cosa che normalmente
avviene in pratica.
E importante notare che quando p = s = , la curva (!) diventa una retta, mentre
(!) e una costante. Infatti dalla (5.11) segue
p 1
(5.37)
k = ! LC 1 ; j !
da cui
p
(!) = ! LC
(5.38)
p
(!) = RG
La condizione s = p e detta condizione di Heaviside ed e molto importante in quanto assicura la propagazione senza distorsione, come si discutera nel capitolo 8. Dato
che in pratica i parametri della linea non soddisfano questa condizione, si usa caricare
periodicamente la linea con condensatori in parallelo spaziati di una distanza piccola
rispetto alla lunghezza d'onda. Questa procedura e detta krarupizzazione della linea e
si puo dimostrare che permette di ottenere il soddisfacimento della condizione di Heaviside. Alternativamente, si puo caricare la linea periodicamente con degli induttori; tale
procedura e detta pupinizzazione.
x5.3 { Espressioni approssimate di costante di propagazione e impedenza caratteristica91
Per quanto riguarda l'approssimazione di bassa frequenza per l'impedenza caratteristica, dalla (5.10) troviamo
s v
u
u
1 + j !RL
R
t
Z1 = G
1 + j !GL
s R
! C
L (5.39)
' G 1;j2 G ; R
Anche in questo caso, se le perdite sono piccole, la parte immaginaria di Z1 si puo
trascurare. Se la condizione di Heaviside e soddisfatta, Z1 non dipende dalla frequenza,
in quanto risulta
s
s
R
Z1 =
= L
(5.40)
G
C
In gura (5.12) sono riportati i graci di (!), (!), G (!), B (!) per una linea di
trasmissione realistica con i seguenti valori delle costanti primarie:
R = 25 L = 2: 5 mH G = 0: 3 S C = 5 nF
(5.41)
per cui le costanti di tempo valgono
p = 0: 0167s s = 10;4s
(5.42)
In questo caso si e trascurata la dipendenza da ! di R, che e legata alle caratteristiche
dell'eetto pelle, discusso nel capitolo 4. Si nota che la parte immaginaria della Y1
e massima quando la parte reale ha la massima variazione. Questa e una proprieta
generale (relazione di Kramers Kronig), legata solo al fatto che Z1(!) si puo considerare
la trasformata di Fourier di una funzione causale.
Si noti che se la linea ha perdite forti (B non trascurabile) il modulo del coeciente di
riessione non ha interpretazione energetica e puo essere maggiore di 1 anche se il carico
e passivo.
92
5 { Linee di trasmissione con perdite
τ −p1
τ s−1
τ −p1
τ s−1
τ −p1
τ s−1
τ −p1
τ s−1
Graci di (!), (!), G (!), B (!) per una linea di trasmissione con perdite. I valori delle costanti primarie sono specicate nel
testo
Figura 5.12
Capitolo 6
Circuiti di adattamento
6.1 Introduzione
In questo capitolo arontiamo un argomento di grande rilevanza pratica nel campo
dei circuiti a parametri distribuiti: l'adattamento di impedenza. Vi sono due tipi di
adattamento: l'adattamento di uniformita e l'adattamento energetico.
Quando una linea di trasmissione deve essere connessa a un carico di valore diverso
dall'impedenza caratteristica occorre interporre un adattatore di uniformita in modo da
eliminare le onde riesse sulla linea. L'altro tipo di adattamento non e specico dei
circuti a parametri distribuiti. Esso e richiesto quando si deve porre un generatore in
grado di erogare la sua potenza disponibile.
Questi due obiettivi si possono raggiungere con dei trasformatori di impedenza sia
a parametri concentrati, sia a parametri distribuiti. Per quanto riguarda i secondi, si
discuteranno varie soluzioni realizzative.
6.2 Tipi di adattamento di impedenza
Consideriamo il circuito di Fig. 6.1 dove un generatore reale e un carico qualsiasi sono
collegati con una linea di trasmissione che supporremo di perdite trascurabili. Abbiamo
+
Vg
Zg
ZL
ZA
A
B
Circuito comprendente una linea di trasmissione ideale
alimentata a una estremita e chiusa su un carico arbitrario all'altra.
Figura 6.1
gia analizzato questo circuito nel paragrafo 3.8 per trovare tensioni e correnti in ogni
punto della linea. La potenza fornita al carico coincide, vista l'assenza di perdite nella
93
94
6 { Circuiti di adattamento
linea, con quella assorbita dall'impedenza di ingresso Zing:
PB = PA = 21 RefVA IA g = 21 jIAj2 RefZingg =
2
= 12 jZ j+VgZj j2 RefZingg
(6.1)
g
ing
Il rapporto d'onda stazionaria (ROS) sulla linea e dato da
+ j V ;B j
(6.2)
S = VVmax = 11 ;
j V ;B j
min
La potenza assorbita dal carico puo anche essere espressa in funzione della massima
tensione sulla linea. Infatti, esprimiamo dapprima tale potenza in funzione della tensione
progressiva
+2
(6.3)
PB = 12 jVZB j 1 ; j V;B j2 :
1
La massima tensione della linea vale
Vmax = jVB+j(1 + j V;B j):
(6.4)
Eliminando jVB+j tra le due equazioni troviamo:
2
PB = 21 VZmax S1 :
(6.5)
1
A seconda dei valori dell'impedenza interna del generatore ZG e dell'impedenza di carico,
si possono vericare due casi diversi (Pozar, 1998):
A) Adattamento del carico alla linea
Se ZL = Z1, il coeciente di riessione in B e nullo e cos pure quello in A, e quindi
Zing = Z1. In questa condizione, denita di adattamento di uniformita, il diagramma
di onda stazionaria sulla linea e piatto (ROS = 1) dato che e presente solo un'onda
progressiva. La potenza fornita al carico risulta essere
(6.6)
PB = 21 jVg j2 jZ Z+1Z j2 :
1
g
Osserviamo che, a parita di potenza attiva fornita al carico PB , la tensione massima sulla
linea Vmax ha il minimo valore quando il carico e adattato alla linea. Alternativamente,
si puo dire che a parita di tensione massima sulla linea, la potenza trasferita al carico e
massima quando esso e adattato. Questa considerazione e importante poiche in generale
per ogni linea di trasmissione esiste un valore massimo della dierenza di potenziale tra
i due conduttori, superando la quale scocca l'arco elettrico e la linea e irreparabilmente
danneggiata. Dalla (6.5) risulta evidente l'importanza di lavorare con un ROS quanto
piu possibile prossimo a uno.
B) Adattamento energetico del generatore
Supponiamo che nel circuito di Fig.6.1 il generatore sia ssato, mentre si possa cambiare
x6.2 { Tipi di adattamento di impedenza
95
il valore dell'impedenza di ingresso Zing cambiando l'impedenza di carico ZL oppure le
caratteristiche della linea di trasmissione. Possiamo chiederci qual'e il valore di Zing
che permette di estrarre la massima potenza da quel generatore e trasferirla al carico.
)=2:
Riscriviamo la (6.1) ricordando che RefZing g = (Zing + Zing
Zing + Zing
j
V
g j2
PB = 4 (Z + Z )(Z + Z )
(6.7)
g
ing g
ing
e calcoliamone la derivata rispetto a Zing:
@PB = jVg j2 1 Zing + Zg ; Zing ; Zing
=
@Zing
4 Zg + Zing
(Zg + Zing)2
Zg ; Zing
jVg j2 1
(6.8)
(Zg + Zing )2
4 Zg + Zing
Tale derivata si annulla quando Zing = Zg , condizione che si denisce di adattamento
energetico. La potenza erogata dal generatore in tal caso e detta potenza disponibile del
generatore e vale
1
j
V
g j2
Pdisp = 2 4R
(6.9)
g
dove Rg = RefZg g e la resistenza interna del generatore. Questa e la massima potenza
che quel generatore e in grado di fornire.
E interessante osservare che la potenza erogata da un certo generatore in una condizione di carico generica si puo scrivere come
PB = Pdisp(1 ; j k;ingj2)
(6.10)
dove k;ing e un coeciente di riessione generalizzato dell'impedenza Zing rispetto all'impedenza interna del generatore, introdotto da Kurokawa:
Z ; Z
jXg ; Rg
k
;ing = Zing + Zg = ZZing +
(6.11)
ing
g
ing + jXg + Rg
Si noti che quando Zg e reale il coeciente di riessione di Kurokawa coincide con quello
ordinario, mentre e un concetto diverso quando Zg e complesso. Tuttavia coincide con
l'usuale coeciente di riessione dell'impedenza Zing + jXg rispetto a Rg e in questo
modo puo essere determinato gracamente con la carta di Smith.
Posto poi
V
;ing = x + jy;
(6.12)
; Z1 = a + jb;
V
(6.13)
;g = ZZg +
g Z1
si puo dimostrare che il luogo nel piano V;ing dei punti per cui e PB =Pdisp = m con m
costante e la circonferenza di equazione (vedi Fig. 6.2):
x2 + y2 ; 2x ; 2y + = 0
(6.14)
96
6 { Circuiti di adattamento
dove
= 1 ; (1 ; ma
m) (a2 + b2 ) ;
mb
= ; 1 ; (1 ; m
;
) (a2 + b2 )
+ a2 + b2 ;
= 1 ;m(1;;1 m
) (a2 + b2 )
(6.15)
con centro nel punto di coordinate (; ) e raggio
p
2 b2 )
r = 1 ;1 ;(1m;(1m;) (aa2 ;
+ b2 ) :
(6.16)
In particolare, quando m = 0, cioe la potenza erogata e nulla, il luogo in questione e la
circonferenza di raggio unitario e centro l'origine del piano V;ing, mentre, quando m = 1,
ossia il generatore eroga la potenza disponibile, il luogo si riduce al punto di coordinate
(a; ; b).
m=0
m=0.2
m=0.4
m=0.6
m=0.8
m=1
Figura 6.2
Luoghi PB =Pdisp = m sulla carta di Smith, con V;g = 0: 5(;1 + j ).
Si noti che quando e soddisfatta la condizione di adattamento energetico, il ROS
sulla linea puo essere maggiore di 1, essendo questo legato a j V;B j. In altre parole,
l'adattamento energetico e indipendente dall'adattamento di uniformita. La condizione
di funzionamento ottimale del circuito di Fig. 6.1 e quella in cui sia il carico sia il
generatore sono adattati alla linea. Infatti, in queste condizioni il generatore eroga
la massima potenza. Inoltre, a causa dell'adattamento di uiformita, la tensione sulla
linea e la massima possibile. Qualora le perdite non fossero trascurabili, l'attenuazione
introdotta dalla linea sarebbe la minima e coinciderebbe con quella nominale. Inne,
come sara discusso in (dominio del tempo), la condizione di adattamento di uniformita
e essenziale per minimizzare le distorsioni.
Nel resto del capitolo mostreremo come si possono progettare dei trasformatori di
impedenza che permettano di raggiungere la condizione di adattamento.
x6.3 { Adattatori di impedenza
97
6.3 Adattatori di impedenza
Osserviamo innanzitutto che la rete di adattamento deve contenere almeno due elementi
indipendenti, visto che devono essere soddisfatte due condizioni una sulla parte reale e
una su quella immaginaria dell'impedenza di ingresso. Se la rete contiene piu di due
elementi indipendenti, si possono soddisfare condizioni di adattamento multiple, cioe a
piu frequenze o su una banda di frequenze. Per ora ci occupiamo del caso piu semplice
di adattamento a una singola frequenza.
Si e visto nella sezione precedente che per svariati motivi e utile saper progettare dei
trasformatori di impedenza che svolgono la funzione indicata in Fig. 6.3. Nel caso dell'a-
ZL
Z ing
Figura 6.3
Schema di adattatore di impedenza.
dattamento di uniformita (o alla linea di trasmissione) Zing e l'impedenza caratteristica
Z1 della linea di alimentazione. Nel caso dell'adattamento energetico, Zing e la complessa coniugata dall'impedenza interna del generatore che deve alimentare il carico ZL.
Esistono diverse soluzioni per questo problema, tutte costituite da reti idealmente prive
di perdita. Noi discuteremo
. Cella a \L" con elementi reattivi concentrati
. Cella a singolo stub
. Cella a doppio e triplo stud
. Adattatore in =4
6.3.1 Celle a L con elementi reattivi concentrati
Sono possibili due strutture (vedi Fig.6.4) Si vedra tra breve che la rete di Fig. 6.4a
jX
jX
jB
Z ing
jB
Z ing
(a)
Figura 6.4
ZL
(b)
Schema di adattatore a L: (a) se Ring < RL e (b) se Ring > RL .
ZL
98
6 { Circuiti di adattamento
si usa quando Ring < RL, quella di Fig. 6.4b nell'altro caso. Ragioniamo sulla prima
congurazione. La condizione che deve essere vericata ai terminali di ingresso e
Ring + jXing = jX + jB + 1 1
(6.17)
RL +jXL
Questa e un'equazione complessa nelle due incognite reali B e X che puo essere risolta
separando parte reale e immaginaria del secondo membro. Con qualche trasformazione
algebrica si trova
=
2 membro = jX + RL + jXL
1 ; BXL + jBRL
L )[(1 ; BXL ; jBRL ]
= jX + (RL +(1jX
=
; BXL )2 + (BRL )2
2
= jX + j XL(1 ; BX2 L) ; BRL2 +
(1 ; BXL) + (BRL)
BXL) ; BRLXL =
+ R(1L(1;;BX
L )2 + (BRL )2
= B 2(R2 + X 2R)L; 2BX + 1 +
L
)
( L L
X
L ; B (RL2 + XL2 )
+ j X + B 2 (R2 + X 2 ) ; 2BX + 1
L
L
L
Imponiamo l'uguaglianza tra primo e secondo membro
Ring = B 2 (R2 + X 2R)L; 2BX + 1
L
L
L
(6.18)
2
2
X
L ; B (RL + XL )
Xing = X + B 2 (R2 + X 2 ) ; 2BX + 1
L
L
L
Dalla prima si ottiene un'equazione di secondo grado in B :
(RL2 + XL2 )B 2 ; 2XLB + (1 ; RRL ) = 0
(6.19)
ing
che ha le soluzioni
s q
(
)
R
1
L
2
2
(6.20)
B = R2 + X 2 XL R RL + XL ; RingRL
ing
L
L
I corrispondenti valori di X si trovano dalla seconda delle (6.18). Per l'applicabilita
di queste formule si richiede naturalmente che il radicando sia positivo: si verica che
cio e assicurato se Ring < RL, come era stato anticipato. Nel caso questa condizione
non sia soddisfatta, occorre fare uso della congurazione di Fig. 6.4b. In questo caso la
condizione da imporre e
1
1
(6.21)
=
jB
+
Ring + jXing
jX + (RL + jXL)
x6.3 { Adattatori di impedenza
99
da cui
Ring ; jXing = jB + RL ; j (X + XL)
(6.22)
2 + X2
Ring
RL2 + (X + XL)2
ing
Eguagliando parte reale e parte immaginaria dei due membri si ottengono le due equazioni
Ring
= 2 RL
2
2
Ring + Xing
RL + (X + XL)2
(6.23)
X
X
+
X
ing
L
; R2 + X 2 = B ; R2 + (X + X )2
L
ing
ing
L
Dalla prima equazione si ricava X :
2 + X 2 ) ; R2
(6.24)
(X + XL)2 = RRL (Ring
ing
L
ing
da cui segue
s
q 2
2 ; RL Ring RL
X = ;XL Ring + Xing
(6.25)
R
ing
Inne, dalla seconda delle (6.23) si ottiene subito B . Si noti che il radicando e certamente
positivo se Ring > RL.
In tal modo abbiamo risolto il problema di adattamento con piena generalita. Naturalmente, nel caso di adattamento di uniformita a una linea di trasmissione, le formule si
semplicano poiche Xing = 0. E utile riottenere la soluzione del problema di adattamento
proposto per via graca, tramite la carta di Smith.
La suscettanza B e la reattanza X possono essere realizzate con componenti concentrati (condensatori e induttori) se la frequenza e abbastanza bassa. Il limite superiore
puo essere ssato a quella frequenza a cui la dimensione del componente e dell'ordine
di =10. Cio signica che con le usuali tecnologie si puo usare questa tecnica di adattamento no a frequenze di qualche GHz (vedi Pozar p. 287). Alternativamente, per
frequenze nel campo delle microonde, B e X possono essere realizzate con tratti di linea
di trasmissione chiusi in corto circuito o circuito aperto che, come discusso nel paragrafo
3.6, hanno impedenza di ingresso puramente reattiva.
6.3.2 Adattatori a stub singoli
Gli adattatori di questo tipo sono costituiti sostanzialmente da un tratto di linea di
trasmissione e da una reattanza pura, che puo essere connessa in serie o in parallelo alla
linea stessa. tale reattanza a sua volta e realizzata con un tratto di linea di trasmissione,
detto \stub", chiuso in corto circuito o lasciato in circuito aperto. Supponiamo di dover
progettare un adattatore di uniformita con stub in parallelo, (Fig. 6.5), realizzato con
tratti di linea di trasmissione con la stessa impedenza caratteristica della linea di accesso.
L'adattatore e un trasformatore di impedenza: la sua impedenza di ingresso normalizzata
deve essere yA; = 1 quando esso e chiuso su yL. Sappiamo che il luogo delle yA sulla
carta di Smith delle ammettenze al variare di lAB e una circonferenza di centro l'origine e
raggio pari a j;Lj. Questa circonferenza interseca la circonferenza a conduttanza costante
g = 1 nei punti I1 e I2 (vedi Fig. 6.6. Entrambi i punti indicano valori di yA che hanno la
+
+
100
6 { Circuiti di adattamento
Z∞
Figura 6.5
Z∞
jbs
ZL
A+
B
Adattatore di uniformita con stub in parallelo.
y
L
I1
y=1
zL
Figura 6.6
I
2
Carta di Smith relativa al progetto dell'adattatore di Fig. 6.5
parte reale richiesta. Dai punti suddetti si ariva al centro della carta di Smith scegliendo
la suscettanza bs:
bs = ;I mfyA g:
(6.26)
Usando ancora la carta di Smith e immediato determinare la lunghezza dello stub in
modo che la suscettanza di ingresso sia proprio quella voluta. La lunghezza del tratto di
linea AB si ricava dalla rotazione necessaria per passare da yL a I1 (o I2).
+
Esempio
Progettare un adattatore di uniformita con stub in parallelo chiuso in corto circuito con ZL =
125 + 125j e Z1 = 50 .
Si trova L = ZL =Z1 = 2;5 + 2;5j e quindi yL = 0;2 + 0;2j ; si ricava j I ;L j = 0;67 e lunghezza
elettrica equivalente 0,0326 (vedi Fig. 6.7). Dall'intersezione della circonferenza a modulo di
j I ;j costante con la circonferenza Refyg = 1 si ottiene yA = 1 + 1;84j e quindi bs = ;1;84.
Essendo 0,1843 la lunghezza elettrica equivalente di I ;A , la lunghezza del tratto AB risulta
(0;1843 ; 0;0326) = 0;1517. Lo stub invece e lungo ls = (0;329 ; 0;25) = 0: 079.
Naturalmente esiste anche la soluzione bs = 1;84 corrispondente a yA = 1 ; 1;84j . In
tal caso la lunghezza del tratto AB diviene 0: 283 e quella dello stub (ancora chiuso in corto
circuito) risulta ls = 0: 421.
+
+
+
Il tratto AB potrebbe essere allungato di un multiplo intero di =2. L'impedenza
di ingresso dell'adattatore sarebbe sempre Z1 alla frequenza di progetto, ma la sua
x6.3 { Adattatori di impedenza
101
banda sarebbe piu piccola. Vale infatti la regola generale: la banda di un componente e
tanto piu piccola quanto piu grande e l'energia che il dispositivo puo immagazzinare. In
assenza di componenti concentrati, la quantita di energia immagazzinata e proporzionale
alle dimensioni elettriche del componente stesso. Analogo discorso vale ovviamente per
la lunghezza dello stub.
l AB
λ
0,1843
yA
+
0,0326
yL
l AB
λ
yA -
yA
Figura 6.7
+
Carta di Smith relativa al progetto dell'adattatore dell'esempio
Il procedimento descritto per progettare un adattatore di uniformita puo essere generalizzato per risolvere il problema degli adattatori energetici. In questo caso il punto
di arrivo sulla carta di Smith non e il centro, ma un punto generico, corrispondente al
complesso coniugato dell'impedenza interna del generatore. La struttura dell'adattatore
102
6 { Circuiti di adattamento
e ancora la stessa di prima:
1. un tratto di linea di trsmissione, che permette di ottenere la parte reale dell'ammettenza di ingresso desiderata;
2. una suscettanza in parallelo che modichi la parte immaginaria dell'ammettenza di
ingresso no a portarla al valore desiderato.
Il problema, ora, e che non sempre il passo 1 puo essere eettuato con successo. Ossia,
data una ammettenza di carico YL, con un adattatore del tipo di Fig. 6.5 si possono
raggiungere i punti della carta di Smith appartenenti alla regione Rd (vedi Fig. 6.8).
Infatti, al variare della lunghezza della linea AB la parte reale dell'ammettenza di ingresso
y
L
gM
gm
Rd
Figura 6.8
La regione Rd contiene tutti i punti che rappresentano le
ammettenze di ingresso di un adattatore a stub esendo yL l'ammettenza
di carico.
e sempre compresa tra i valori gm e gM deniti dall'intersezione tra la circonferenza a
j;j =cost. passante per yL e l'asse reale. E imediato trovare
j;Lj = 1 ;
gm = g1 = 11 ;
(6.27)
+ j;Lj S
M
dove S e il ROS del carico. Per inciso, e facile rendersi conto che, qualunque sia yL,
la regione Rd contiene sempre l'origine, per cui l'adattameto di uniformita puo essere
sempre realizzato.
Qualora l'ammettenza yg da realizzare sia fuori della regione Rd, si puo ancora utilizzare un adattatore a stub a patto di rovesciare la struttura, come mostrato in Fig. 6.9, ossia
si impiega un adattatore a \L rovesciato", essendo detto a \L dritto" quello di Fig. 6.5.
In tal caso, infatti, i valori di yA; ottenibili a partire da yL sono quelli appartenenti alla
regione Rr (vedi Fig. 6.10). La regione Rr e la corona circolare compresa tra il cerchio
con raggio j;j = 1 e quello con raggio j;j = jgL ; 1j=jgL + 1j. Si vede che l'unione di
Rr e Rd e pari all'intera carta di smith, quindi qualunque problema di adattamento puo
essere risolto con un adattatore a stub (a L diritto a rovesciato). Inoltre l'intersezione
di Rr e Rd non e vuota, per cui la soluzione puo essere ottenuta con entrambi i tipi di
adattatore.
Esempio
Progettare un adattatore energetico con stub in parallelo in circuito aperto con ZL = 150 +
x6.3 { Adattatori di impedenza
Z∞
Z∞
ZL
jbs
- +
A
Figura 6.9
103
B
Adattatore a stub a \L rovesciato".
yL
gL
Rr
La regione Rr contiene tutti i punti che rappresentano le
ammettenze di ingresso di un adattatore a stub esendo yL l'ammettenza di
carico.
Figura 6.10
300j , Zg = 75 ; 75j e Z1 = 75 .
Si calcolano g = 1 + j e L = 2 + 4j , quindi con l'ausilio della carta di Smith si passa alle
ammettenze yg = 0;5 ; 0;5j e yL = 0;1 ; 0;2j . Si trova poi yA = 0;5 + 2j , bs = ;2;5, la
lunghezza del tratto AB risulta 0;221 e quella dello stub ls = 0;3106. Scegliendo invece
yA = 0;5 ; 2j , si ottiene bs = 1;5, la lunghezza del tratto AB pari a 0;3524 e ls = 0;1564.
+
+
Il motivo per cui si sono sempre proposti esempi di connessione in parallelo degli stub
e che questa connessione e piu facile da realizzare. Si pensi per esempio a una linea in
microstriscia.
6.3.3 Adattatore a (doppio stub)
Anche se gli adattatori a L diritto o rovesciato possono risolvere ogni problema di adattamento, a volte si usano adattatori a doppio stub, detti anche a per la loro forma. Lo
schema e riportato in Fig. 6.12. E chiaro che le suscettanze degli stub e la loro separazione possono essere scelte in inniti modi diversi. A volte la distanza AB viene ssata
a priori. In tal caso le soluzioni sono al piu due, ma non esistono sempre. Il progetto si
puo eettuare in due modi equivalenti, partendo dal carico o dal generatore. Partendo
dal carico (vedi Fig. 6.13) si procede cos:
104
6 { Circuiti di adattamento
1. si disegna la circonferenza a conduttanza costante passante per yL: questo e il luogo
di tutte le possibili yB; al variare dello stub in B;
l AB
λ
l AB
yA
+
yA
+
λ
yL
yg∗
Carta di Smith relativa al progetto dell'adattatore energetico del'esempio.
Figura 6.11
2. si ruota l'intera circonferenza di d= verso il generatore e si ottiene il luogo delle
yA ;
3. tale circonferenza interseca quella a conduttanza costante passante per yA; nei punti
I1 e I2. Da questi punti si passa a yA; con lo stub di suscettanza b1 = ImfyA; g ;
ImfyA g;
4. denito il valore di b1 si ricava yB; e quindi b2 = ImfyB; g ; ImfyLg.
+
+
x6.3 { Adattatori di impedenza
A
105
B
ZL
Figura 6.12
Adattatore a doppio stub
y
i
yL
I
1
I2
d/λ
Figura 6.13
Progetto di adattatore a doppio stub partendo dal carico.
La procedura per il progetto dell'adattatore, partendo dale generatore e la seguente (vedi
Fig. 6.14):
1. si disegna la circonferenza a conduttanza costante passante per yA; : esso e il luogo
di tutte le possibili yA al variare dello stub in A;
2. si ruota questa circonferenza di d= verso il carico, ottenendo cos il luogo delle yB; ;
3. questa circonferenza ha intersezioni I3 e I4 con quella a conduttanza costante passante per yL. Questi punti deniscono yB; , per cui si puo trovare b2 = ImfyB; g ;
ImfyLg;
4. trovato b2 , si ricava yA e da questo b1 = ImfyA; g ; ImfyA g.
Naturalmente anche se i diagrammi sulla carta di Smith sono diversi nei due casi, i valori
di b1 e b2 sono gli stessi.
Si e visto che l'adattatore a doppio stub, con lunghezza della linea pressata, non e
sempre in grado di realizzare l'adattamento. Questa limitazione non e presente nel caso
dell'adattatore a triplo stub con distanze pressate (vedi Fig. 6.15). In tal caso, infatti,
l'adattamento si sempre ottenere, a patto di scegliere opportunamente le lunghezze degli
stub. Questo dispositivo puo essere utile in laboratorio: vi sono delle realizzazioni in
cavoo coassiale in cui la lunghezza degli stub e variata con degli stantu mobili. Volendo
eettuare un progetto, si puo seguire il metodo descritto piu sopra. La procedura e la
seguente:
+
+
+
106
6 { Circuiti di adattamento
d/λ
yi
y
L
I
1
I
2
Progetto di adattatore a doppio stub partendo dall'ingresso.
Figura 6.14
A
B
C
ZL
jb1
jb2
Figura 6.15
jb3
Adattatore a triplo stub.
1. si disegnano le circonferenze a conduttanza costante passanti per yL e yA; ;
2. si ruota la prima verso il generatore di d2= e la seconda verso il carico di d1=. Esse
rappresentano i luoghi di yB; e yB rispettivamente. Si intersecano in due punti ed
il valore di b2 e dato da b2 = ImfyB; g ; ImfyB g;
3. deniti yB; e yB si ricavano yA e yC ; e, sulla base di questi, b1 e b3 .
+
+
+
+
6.3.4 Adattatori a =4
Questo adattatore, nella sua forma piu semplice, permette solo di adattare impedenze reali ed e costituito da un tratto di linea di trasmissione, di opportuna impedenza caratteristica, lungo un quarto di lunghezza d'onda alla frequenza di progetto. Lo
schema e riportato in Fig. 6.16. L'impedenza d'ingresso normalizzata e pari all'inverso
dell'impedenza normalizzata di carico:
(6.28)
A = 1 ;
L
da cui
2
ZA = ZR1 :
(6.29)
L
x6.3 { Adattatori di impedenza
Z∞
Ri
A
Figura 6.16
107
RL
B
Adattatore a =4 tra impedenze reali.
Imponendo che l'impedenza di ingresso ZA coincida con l'impedenza d'ingresso Ri, si
trova
q
Z1 = RL Ri:
(6.30)
Quindi il tratto di line AB deve avere impedenza caratterisitica pari alla media geometrica
delle due resistenze da adattare.
Nel caso in cui le due impedenze da adattare siano complesse si puo usare un adattatore costituito da un tratto =4 inserito tra due tratti di linea il cui scopo e quello di
trasformare le due impedenze complesse in resistenze pure, come indicato in Fig. 6.17.
d1
Z1
Zi
A
Figura 6.17
B
λ 4
d2
Z∞
Z2
C
ZL
D
Adattatore a =4 tra carichi complessi.
108
Capitolo 7
La matrice Scattering
7.1 Introduzione
Il piu semplice dispositivo elettrico e un bipolo che e in generale caratterizzato tramite la
sua impedenza ZL, (o il suo inverso, cioe l'ammettenza YL), denita come rapporto tra
la tensione applicata ai suoi morsetti V e la corrente I che lo attraversa. Supponiamo
che il bipolo sia lineare, per cui l'impedenza ZL non dipende dall'eccitazione, ma solo
dalla frequenza. Spesso una coppia di morsetti di un dispositivo e chiamato \porta"; un
bipolo e quindi un circuito con una sola porta.
Come e noto dall'Elettrotecnica, questi concetti si possono generalizzare al caso di
dispositivi con molte coppie di morsetti, o porte, diciamo N . E molto importante il caso
dei doppi bipoli N = 2 (vedi Fig.7.1).
In generale le due tensioni V1 e V2 dipendono sia da I1 sia da I2
(V = Z I +Z I
1
11 1
12 2
(7.1)
V2 = Z21I1 + Z22I2
dove Zij sono solo funzioni della frequenza nel caso, a cui noi limiteremo sempre la nostra
attenzione, di reti lineari. La relazione (7.1) si puo scrivere in forma matriciale:
[V ] = [Z ][I ]
(7.2)
dove [V ] = [V1 V2]T ; [I ] = [I1 I2 ]T sono vettori colonna e la matrice 2 2, [Z ] e detta
matrice delle impedenze a vuoto. Il motivo di questo nome deriva dal fatto che i suoi
I1
V1
Figura 7.1
I2
V2
Doppio bipolo con le denizioni di tensione e corrente alle due porte
109
110
7 { La matrice Scattering
elementi si calcolano, come si desume dalla (7.1), in base alla seguente equazione:
V
i Zij = I (7.3)
j Ik =0;k6=j
ossia tutte le porte, eccetto la j -esima, devono essere lasciate in circuito aperto. Ovviamente la (7.2) puo descrivere anche una struttura a N porte e in tal caso, [Z ] e una
matrice complessa N N . Notiamo che la matrice [Z (!)] si puo interpretare come una
funzione di trasferimento tra le varie correnti impresse (ingressi) e le tensioni a tutte le
porte (uscite).
Come per un bipolo si usa introdurre l'ammettenza YL = 1=ZL, cos per una struttura
a N porte si puo introdurre la matrice delle ammettenze di corto circuito [Y ]. Nel caso
N = 2 la dipendenza lineare tra le correnti e le tensioni si esprime nella forma:
(I = Y V +Y V
1
11 1
12 2
(7.4)
I2 = Y12V1 + Y22V2
ossia, in formalismo matriciale,
[I ] = [Y ][V ]
(7.5)
dove, dal confronto con la (7.2) segue che [Y ] = [Z ];1 . Il nome della matrice [Y ] deriva
dal fatto che i suoi elementi si calcolano dalla (7.4) come:
I
i (7.6)
Yij = V j Vk =0;k6=j
Si puo dimostrare [Pozar] che le matrici [Z ] e [Y ] sono simmetriche (Zij = Zji) nel caso
di strutture reciproche. Inoltre i loro elementi sono immaginari puri nel caso di strutture
senza perdite.
La potenza totale dissipata dal dispositivo e la somma delle potenze entranti alle varie
porte:
N
X
Pd = 21 <fV1I1 + V2I2+: : : +VN IN g = 12 <f ViIig = 21 <f[V ]T [I ] g
(7.7)
i=1
Tutto quanto abbiamo richiamato e appropriato nel caso di reti a parametri concentrati.
Supponiamo ora che a ciascuna delle N porte del dispositivo, siano collegate delle linee
di trasmissione, ciascuna caratterizzata dalla sua impedenza caratteristica Z1i e dalla
sua costante di propagazione ki. Abbiamo visto nel capitolo 1 che lo stato elettrico
di una linea di trasmissione si specica in modo naturale (e nel modo piu semplice)
assegnando i valori di tensione progressiva V + e regressiva V ; e cioe con riferimento alla
base delle onde progressiva e regressiva. Di conseguenza, se un bipolo e connesso alla
linea, esso risulta piu convenientemente descritto in termini del coeciente di riessione
piuttosto che tramite la sua impedenza o ammettenza. Ebbene quello che faremo ora e
generalizzare questo concetto al caso di strutture a N porte, introducendo un coeciente
di riessione matriciale, che viene normalmente chiamato matrice di diusione o, molto
piu frequentemente con termine inglese, matrice scattering o matrice S . Le ampiezze delle
onde progressiva e regressiva sulla linea vengono pero specicate tramite le cosiddette
onde di potenza (power waves) a e b, rispettivamente proporzionali a V + e V ;, denite
x7.1 { Introduzione
111
nel modo seguente. Si e visto nel capitolo 3 che la potenza attiva netta transitante su
una linea con impedenza caratteristica reale si ottiene da:
Pt = 21 Y1jV +j2 ; 12 Y1jV ;j2
(7.8)
Se poniamo
q
q
a = Y1 V + ;
b = Y1 V ;
(7.9)
la precedente equazione si riscrive:
Pt = 21 jaj2 ; 12 jbj2
(7.10)
In relazione all'eq. (1.83) si era data una interpretazione geometrica alla rappresentazione
dello stato elettrico di una linea in termini di onde progressiva e regressiva. Con la scelta
(7.9) si ha:
0p 1
0 p 1
V (z) !
Z
Z
1
= a(z) @ p A + b(z) @ p 1 A
(7.11)
I (z)
; Y1
Y1
e gli stati di base hanno norma 1=2 nel senso che trasportano una potenza pari a 1=2
[W]. Ovviamente, la legge di variazione dei segnali a e b e la stessa di V + e V ;:
a(z) = a(0)e;jkz
(7.12)
b(z) = b(0)e+jkz
Inoltre essi sono legati da
b(z) = ;(z)a(z)
(7.13)
dove ;(z) e il coeciente di riessione del carico su cui la linea e chiusa. Osserviamo
che l'impedenza caratteristica della linea svolge il ruolo di un'impedenza di riferimento,
rispetto a cui il coeciente di riessione e calcolato.
Possiamo ora generalizzare questi concetti al caso di un dispositivo a N porte individuate dall'indice i = 1;2: : : N . Per ogni porta assegniamo una impedenza di riferimento
Zriche si puo interpretare come l'impedenza caratteristica di una linea di trasmissione
connessa alla porta stessa. Su tale linea introduciamo le onde di potenza:
q
q
ai = Yri Vi+ ;
bi = Yri Vi;
(7.14)
Nel caso di un doppio bipolo (N = 2) avremo (vedi Fig.7.2):
b1 = S11 a1 + S12a2
(7.15)
b2 = S21 a1 + S22a2
ossia le onde diuse sulle linee di accesso dipendono dalle onde incidenti a tutte le porte
in generale. Si noti che l'asse longitudinale (asse z) per ogni linea e orientato in modo da
puntare verso il dispositivo. Se introduciamo ora i vettori colonna [a] = [a1 a2]T e [b1 b2 ]T ,
la (7.15) si puo riscrivere in forma matriciale:
[b] = [S ][a]
(7.16)
112
7 { La matrice Scattering
a1
a2
b1
b2
Figura 7.2
Doppio bipolo con le denizioni delle onde di potenza alle due porte
dove [S ] e una matrice complessa 2 2 detta matrice scattering. Ovviamente la forma
della relazione (7.16) e valida anche per una struttura a N porte, nel qual caso [S ] e una
matrice N N . Dalla (7.15) risulta che i suoi elementi Sij si calcolano da:
b
i Sij = a (7.17)
j ak =0;k6=j
da cui e evidente il carattere di coeciente di riessione generalizzato degli elementi
dalla matrice S . I termini sulla diagonale principale (i = j ) sono gli usuali coecienti di
riessione visti alla porta i quando tutte le altre sono chiuse sulle rispettive impedenze
di riferimento in modo da avere solo onde che si allontanano dal dispositivo. I termini
fuori dalla diagonale si potrebbero denire coecienti di transriessione, sempre nelle
condizioni di adattamento di cui sopra. Piu comunemente, si chiamano coecienti di
trasmissione.
Anche se la caratterizzazione di un dispositivo tramite la sua matrice [S ] e, da un punto
di vista teorico, del tutto equivalente (a meno dei casi singolari) a quella in termini di
matrici [Z ] o [Y ], essa e in realta l'unica a essere praticamente impiegata nel campo delle
microonde. I motivi sono svariati, tra questi:
. tensione e corrente non sempre sono grandezze ben denite (p. es. in una guida
d'onda)
. le ampiezze a e b possono essere misurate direttamente con strumenti detti \analizzatori di reti" (network analyzer). In genere interessa una caratterizzazione a larga
banda dei dispositivi ed e molto piu facile ottenere dei carichi adattati a larga banda
piuttosto che dei corti circuiti o circuiti aperti, che sono i carichi di riferimento per
le matrici [Y ] e [Z ].
7.2 Relazione tra le matrici
S ] e [Z ]
[
Abbiamo dato, in (7.17) una denizione esplicita degli elementi della matrice [S ]. Esiste
una relazione tra la matrice [S ] e la matrice delle impedenze a vuoto [Z ] che generalizza
quella del caso scalare (eq.(3.30)). Si dimostra infatti che:
[S ] = f[ ] ; [1]gf[ ] + [1]g;1
(7.18)
dove [1] e la matrice identita di dimensione N e [ ] e la matrice delle impedenze a vuoto
normalizzate del dispositivo:
[ ] = [Zr ];1=2 [Z ][Zr ];1=2
(7.19)
x7.3 { Calcolo della potenza dissipata da un dispositivo
113
Abbiamo indicato con [Zr ] la matrice diagonale i cui elementi sono le impedenze di
riferimento. Nel caso di un bipolo (N = 1) la precedente diventa = Z=Zr , come gia
discusso in relazione all'eq.(3.4).
L'eq. (7.18) si dimostra nel modo seguente. Partiamo dalla caratterizzazione della
struttura in termini di impedenze:
[V ] = [Z ][I ]
(7.20)
Esprimiamo ora [V ] e [I ] in termini di onde di potenza [a] e [b]:
[V ] = [V +] + [V ;] = [Zr ]1=2 ([a] + [b])
[I ] = Y1 [V +] ; [V ;] = [Yr ]1=2 ([a] ; [b])
Sostituiamo nella (7.20):
[Zr ]1=2 ([a] + [b]) = [Z ][Yr ]1=2 ([a] ; [b])
Svolgendo i prodotti e mettendo in evidenza [Zr ]1=2 da sinistra nei due membri, si trova
[Zr ]1=2 [Yr ]1=2 [Z ][Yr ]1=2 + [1] [b] = [Zr ]1=2 [Yr ]1=2 [Z ][Yr ]1=2 ; [1] [a]
Eliminando il fattore comune [Zr ]1=2 le (7.18) e (7.19) seguono immediatamente.
La relazione inversa della (7.18) e
[Z ] = [Z1]1=2 f[1] + [S ]gf[1] ; [S ]g;1[Z1]1=2
In modo analogo si dimostrano le seguenti relazioni tra la matrice scattering e
ammettenza di corto circuito:
[S ] = f[1] ; [y]gf[1] + [y]g;1
dove la matrice delle ammettenze normalizzate e:
[y] = [Zr ]1=2 [Y ][Zr ]1=2
La relazione inversa a (7.22) e:
[Y ] = [Z1];1=2 f[1] ; [S ]gf[1] + [S ]g;1[Z1];1=2
7.3 Calcolo della potenza dissipata da un dispositivo
(7.21)
quella
(7.22)
(7.23)
(7.24)
Consideriamo un dispositivo con N porte, caratterizzato tramite la sua matrice scattering
[S ]. La potenza dissipata in esso e pari alla somma delle potenze nette entranti che
uiscono lungo ogni linea di trasmissione di accesso:
N
X
Pd = 21 (jaij2 ; jbij2) = 21 ([a]T [a] ; [b]T [b])
(7.25)
i=1
dove [a] e [b] sono vettori colonna di dimensione N . Ora, ricordiamo che:
[b] = [S ][a];
[b]T = [a]T [S ]T (7.26)
114
per cui
7 { La matrice Scattering
Pd = 21 [a]T ([1] ; [S ]T [S ])[a]
(7.27)
E immediato rendersi conto che questa equazione, per N = 1 si riduce alla
+2
(7.28)
Pd = 12 jVZ j (1 ; j;j2)
1
Osserviamo che se il dispositivo e privo di perdite, Pd = 0 per ogni eccitazione e quindi
la matrice [S ] gode della proprieta:
[S ]T [S ] = [1]
(7.29)
ovvero
[S ];1 = [S ]T (7.30)
Una matrice che soddisfa la precedente relazione si dice unitaria. Nel caso N = 2 le
equazioni precedenti si esplicitano cosi:
jS11j2 + jS21 j2 = 1
jS12j2 + jS22 j2 = 1
jS11j2 + jS12 j2 = 1
(7.31)
jS21j2 + jS22 j2 = 1
S11S12 + S21 S22 = 0
S11S21 + S12 S22 = 0
Queste relazioni hanno un'interpretazione geometrica: le righe (e le colonne) di una
matrice unitaria costituiscono una base ortonormale nello spazio vettoriale complesso a
N dimensioni.
7.3.1 Proprieta della matrice scattering [S ] di un dispositivo
. Un dispositivo reciproco possiede una matrice scattering simmetrica: [S ] = [S ]T .
(Ricordiamo che un circuito comprendente resistenze, capacita, induttanze e linee
di trasmissione e sempre reciproco)
. Un dispositivo senza perdite possiede una matrice scattering unitaria: [S ]T [S ] = [1].
. Un dispositivo passivo possiede una matrice [S ] tale che tutti gli autovalori di
[S ]T [S ] hanno modulo minore di (o al piu uguale a) 1.
. Un dispositivo attivo ha una matrice [S ] tale che almeno un autovalore di [S ]T [S ]
ha modulo maggiore di 1.
7.4 Cambiamento delle impedenze di riferimento
Supponiamo che di un dispositivo sia assegnata la matrice scattering [So ] rispetto a un
insieme di impedenze di riferimento [Zro]. di accesso, Supponiamo poi di specicare un
x7.4 { Cambiamento delle impedenze di riferimento
115
nuovo insieme di impedenze di riferimento [Zrn] e si voglia calcolare la nuova matrice
scattering [Sn].
Arontando il problema con gradualita, consideriamo il caso di un bipolo con coeciente di riessione ;o rispetto a Zro. Il suo coeciente di riessione ;n rispetto a Zm si
ricava da:
;n = Z ; Zrn
(7.32)
Z + Zrn
con
+ ;o
Z = Zro 11 ;
(7.33)
;
o
Sostituendo ed elaborando, troviamo:
+ ;o ; Z
Zro 11 ;
rn
Zrn) + ;o (Zro + Zrn) = ;no + ;o
(7.34)
;n = 1 + ;;o
= ((ZZro ;
ro + Zrn ) + ;o (Zro ; Zrn ) 1 + ;no ;o
Zro 1 ; ;o + Zrn
o
dove si e introdotto il coeciente di riessione
Zrn
;no = ZZro ;
ro + Zrn
Arontiamo ora il caso di un dispositivo a N porte. Dalla (7.18) e
1
(7.35)
[S2] = [[2]] ;
2 +1
dove
[2] = [Zr2];1=2 [Z ][Zr2];1=2 = [Zr2];1=2 [Zr1]1=2 [1 ][Zr1]1=2 [Zr2];1=2 =
(7.36)
= [R][1][R]
avendo posto [R] = [Zr2];1=2 [Zr1]1=2 . Si ricordi che queste matrici sono diagonali e quindi
commutano. Esprimiamo [1] in funzione della matrice [S1] e sostituiamo in (7.35)
[1] + [S ] [R] ; [1] [R] [1] + [S ] ; [R];1
[R] [1]
[S ]
; [S ]
= [1]
[S2] = [1] ;
+
[
S
]
[1]
+ [S ] + [R];1 =
[R] [1] ; [S ] [R] + [1] [R] [1] ;
(7.37)
[S ]
R] ; [R];1) + ([R] + [R];1)[S ] = [S ]12 + [S ]
= ([([R
] + [R];1 ) + ([R] ; [R];1)[S ] [1] + [S ]12 [S ]
dove si e posto
] ; [R];1 = [R]2 ; 1
[S ]12 = [[R
(7.38)
R] + [R];1 [R]2 + 1
Osserviamo che questo risultato si puo ricavare anche dalle formule generali che forniscono
la matrice [S ] della cascata di due strutture, discusse nella sezione 7.6.
116
7 { La matrice Scattering
7.5 Spostamento dei piani di riferimento
La matrice [S ] di un dispositivo descrive la sua caratteristica ingresso/uscita nella base
delle onde progressive e regressive su ciascuna linea di accesso. Le ampiezze di tali onde
sono numeri complessi che variano con la coordinata longitudinale. Quindi una specica
matrice S ha signicato univoco rispetto a una precisa scelta di piani di riferimento.
Vediamo ora come si trasforma una matrice S assegnata a seguito di una traslazione di
questi piani. Consideriamo un dispositivo con N porte con matrice scattering S0 (vedi
Fig.7.3). Le ampiezze delle onde incidenti e riesse alla porta i sono indicate con a0i e
b0i rispettivamente. Le stesse ampiezze ma ad una distanza li(> 0) allontanandosi dal
dispositivo sono ai , bi date da
ai = a0i ejkili ;
bi = b0i e;jkili
(7.39)
dove ki e la costante di propagazione sulla linea connessa alla porta i. Ovviamente,
analoghe relazioni valgono per i = 1;2; : : : ;N . Se ora introduciamo i vettori colonna [a],
[b], [a0], [b0 ], con componenti rispettivamente ai, bi, a0i , b0i , le precedenti equazioni si
possono scrivere in forma matriciale:
[a] = [expf+jklg] [a0 ]
(7.40)
[b] = [expf;jklg] [b0 ]
dove [expfjklg] e una matrice diagonale data da:
exp(jkl) = diagf expfjk1 l1g : : : expfjkN lN g g
(7.41)
Indichiamo con [S ] la matrice scattering della nuova struttura ottenuta traslando i piani
ai
a0i
bi
b0i
porta i
li
porta j
[S0]
a0j
aj
b0j
bj
lj
[S]
Figura 7.3
Spostamento piani di riferimento
di riferimento. Se [S0] e la matrice scattering della struttura originaria, allora si ha:
[b0 ] = [S0 ][a0 ]
(7.42)
Sostituendovi le (7.40) si trova
[b] = [expf;jklg][S0 ][expf;jklg][a]
(7.43)
x7.6 { Connessione di strutture
117
In altre parole, e
[S ] = [expf;jklg][S0 ][expf;jklg]
(7.44)
Esplicitiamo questa relazione. Per gli elementi della diagonale principale
Sii = S0ii e;2jkili
(7.45)
E immediato riscontrare l'analogia con la legge di trasformazione (Eq.(3.33)) dei coecienti di riessione. Del resto cio non deve stupire, visto che tali elementi della matrice
S sono proprio i coecienti di riessione alla porta i quando tutte le altre sono chiuse
sulle rispettive impedenze di riferimento. Per gli altri elementi la relazione precedente si
generalizza in
Sij = S0ij e;j(kili +kj lj )
(7.46)
7.6 Connessione di strutture
Molto spesso e conveniente pensare un sistema complicato come costituito di vari blocchi
piu semplici interconnessi. Supponendo di conoscere le matrici scattering dei vari blocchi,
sorge quindi il problema di calcolare la matrice scattering della struttura complessiva.
Facendo riferimento alla Fig. 7.4, consideriamo due strutture, la prima con N + K
porte, la seconda con K + N porte, che devono essere connesse attraverso le K porte,
dando luogo a una struttura complessiva con N + M porte.
Nel denire le onde di potenza alle varie porte, e conveniente usare un formalismo
vettoriale, distinguendo pero quelle relative alle porte che poi saranno connesse dalle
altre.
1
[a1]
2
[a’]
[b’]
S’(N+K)(N+K)
[b1]
K porte
N porte
[a’’]
[b’’]
S’’(K+M)(K+M)
K porte
[a2]
[b2]
M porte
S(N+M)(N+M)
Figura 7.4
Connessione di due strutture
Questa operazione implica una partizione in blocchi delle matrici scattering delle due
strutture. La prima si scrive
0
1
N f 0 [b1 ] 1 B [S110 ] ... [S120 ] C 0 [a1 ] 1 gN
@ A = B
(7.47)
@ . CA @ 0 A
0
K f [b ]
[
a
]
g
K
0
0
.
[S21] . [S22 ]
118
7 { La matrice Scattering
dove i blocchi [Sij0 ] hanno le seguenti dimensioni:
N N
N K
KN
K K
Implicita in questa partizione e l'assunzione che le porte da connettere siano le ultime K .
Questa condizione puo sempre essere ottenuta con opportuni scambi di righe e colonne.
Infatti:
[S110 ]
[S120 ]
[S210 ]
[S220 ]
!
!
!
!
lo scambio di bi con bj richiede lo scambio delle righe i e j di [S 0]
lo scambio di ai con aj richiede lo scambio delle colonne i e j di [S 0 ]
La seconda struttura, analogamente, e caratterizzata dalla matrice scattering [S 00] nel
modo seguente
0
10
.
0
1
00
00
00
.
K f [b ]
[S11] . [S12 ] C [a00 ] 1 gK
B
@ A = B@ CA @ A
(7.48)
.
M f [b2 ]
[
a
]
g
M
2
[S2100 ] .. [S2200 ]
dove i blocchi [Sij00 ] hanno le seguenti dimensioni:
K K
KM
M K
M M
In questo caso si e assunto che le porte da connettere siano le prime K
Supponiamo che le porte da connettere usino le stesse impedenze di riferimento. In
tali condizioni, le equazioni che deniscono la connessione sono
[a0 ] = [b00 ]
(7.49)
[a00 ] = [b0 ]
Operando la connessione, la struttura risultante accede al mondo esterno tramite N porte
sul lato \1" e M porte sul lato \2" e quindi e descritta da una matrice scattering [S ] di
dimensione (M + N ) (M + N ), partizionata naturalmente nel modo seguente
0
1
N f 0 [b1 ] 1 B [S11] ... [S12 ] C 0 [a1 ] 1 gN
@ A = B@ CA @ A
(7.50)
.
M f [b2 ]
[
a
]
g
M
2
.
[S21] . [S22 ]
[S1100 ]
[S1200 ]
[S2100 ]
[S2200 ]
!
!
!
!
x7.6 { Connessione di strutture
119
dove i blocchi [Sij ] hanno le seguenti dimensioni:
[S11] ! N N
[S12] ! N M
[S21] ! M N
[S22] ! M M
Per determinare la matrice [S ] risultante occorre eliminare le variabili [a0], [a00], [b0 ], [b00 ]
dalle (7.47) e (7.48), tramite le (7.49).
I passi da eettuare per ottenere questo risultato sono i seguenti:
1. Sostituiamo le (7.49) in (7.48), la prima delle quali diventa
[a0 ] = [S11 ][b0 ] + [S1200 ][a2 ]
(7.51)
2. La seconda delle (7.47) e
[b0 ] = [S210 ][a1 ] + [S220 ][a0 ]
(7.52)
Eliminando [a0] tra (7.51) e (7.52), ottenendo
[b0] = [S210 ][a1] + [S220 ] f[S1100 ][b0 ] + [S1200 ][a2 ]g
da cui troviamo l'espressione di [b0 ] in funzione di [a1 ] e [a2]
[b0 ] = ([1] ; [S220 ][S1100 ]);1 f[S210 ][a1 ] + [S220 ][S1200 ][a2 ]g
(7.53)
3. Sostituendo (7.53) in (7.51) troviamo l'espressione di [a0 ] in funzione di [a1 ] e [a2]:
[a0 ] = [S1100 ] ([1] ; [S220 ][S1100 ]);1 [S210 ][a1 ]+
n
o
(7.54)
+ [S1100 ] ([1] ; [S220 ][S1100 ]);1 [S220 ] + [1] [S1200 ][a2 ]
La parentesi graa che moltiplica [S1200 ][a2] si puo semplicare. Ponendo per piu
semplice lettura [X ] = [S1100 ] e [Y ] = [S220 ] si ha la catena di uguaglianze:
[X ] ([1] ; [Y ][X ]);1 [Y ] + [1] =
raccogliamo [X ] a sinistra e [Y ] a destra:
n
o
= [X ] ([1] ; [Y ][X ]);1 + [X ];1[Y ];1 [Y ] =
raccogliamo ([1] ; [Y ][X ]);1 a sinistra:
n
o
= [X ] ([1] ; [Y ][X ]);1 [1] + ([1] ; [Y ][X ]) [X ];1[Y ];1 [Y ] =
raccogliamo [X ];1[Y ];1 a destra:
= [X ] ([1] ; [Y ][X ]);1 f[Y ][X ] + [1] ; [Y ][X ]g [X ];1[Y ];1[Y ] =
Semplichiamo:
= [X ] ([1] ; [Y ][X ]);1 [X ];1 =
120
7 { La matrice Scattering
riscriviamo come inverso:
n
o;1
= [X ] ([1] ; [Y ][X ]);1 [X ];1 = f[1] ; [X ][Y ]g;1
In conclusione, e ritornando alla notazione usuale, la (7.54) si riscrive
[a0] = [S1100 ] ([1] ; [S220 ][S1100 ]);1 [S210 ][a1]+
(7.55)
+ ([1] ; [S1100 ][S220 ]);1 [S1200 ][a2 ]
4. Sostituiamo la (7.55) nella prima delle (7.47) per ricavare [b1 ] in funzione di [a1 ] e
[a2 ]:
n
o
[b1 ] = [S110 ] + [S120 ][S1100 ] ([1] ; [S220 ][S1100 ]);1 [S210 ] [a1]+
(7.56)
+ [S120 ] ([1] ; [S1100 ][S220 ]);1 [S1200 ][a2 ]
Da questa equazione, confrontando con le (7.50) si ricavano le espressioni di [S11 ] e
[S12 ].
5. Sostituiamo ora nella seconda delle (7.48) [a00] = [b0] con quest'ultimo dato da (7.53):
[b2 ] = [S2100 ] ([1] ; [S220 ][S1100 ]);1 [S210 ][a1 ]+
n
o
(7.57)
+ [S2100 ] ([1] ; [S220 ][S1100 ]);1 [S220 ][S1200 ] + [S220 ] [a2 ]
Confrontando questa equazione con la seconda delle (7.50) si desumono le espressioni dei restanti elementi [S21 ] e [S22 ]. Riscriviamo in conclusione per comodita le
espressioni dei quattro blocchi:
[S11] = [S110 ] + [S120 ] [S1100 ] ([1] ; [S220 ] [S1100 ]);1 [S210 ]
[S12] = [S120 ] ([1] ; [S1100 ] [S220 ]);1 [S1200 ]
(7.58)
[S21] = [S2100 ] ([1] ; [S220 ] [S1100 ]);1 [S210 ]
[S22] = [S2200 ] + [S2100 ] ([1] ; [S220 ] [S1100 ]);1 [S220 ] [S1200 ]
Notiamo che le strutture che si connettono sono dei doppi bipoli tutte le sottomatrici
si riducono a scalari.
Un altro caso particolare e quello in cui tutte le porte della seconda struttura vengono
connesse, per cui essa si comporta come un carico con K porte. In tal caso M = 0 e
tutta la struttura, avendo solo N porte di accesso e caratterizzata dal solo [S11 ].
Il calcolo della matrice scattering della struttura complessiva richiede sempre l'inversione di una matrice che ha dimensione pari al numero K di porte che vengono connesse. Questa matrice e non invertibile quando la struttura complessiva, risultante dalla
connessione, risuona.
Se le strutture parziali sono dissipative, cio accade solo per valori complessi di frequenza, situati nel semipiano superiore per motivi di stabilita.
Se si applica lo sviluppo in serie di Taylor
([1] ; [A]);1 = [1] + [A] + [A]2 + : : : + [A]n + : : :
(7.59)
convergente se gli autovalori di [A] sono in modulo minori di 1 (il che accade per strutture
dissipative), si ottiene la caratterizzazione della struttura complessiva in termini della
serie delle riessioni multiple.
x7.7 { Matrice scattering di alcuni dispositivi
121
7.7 Matrice scattering di alcuni dispositivi
In questa sezione si presentano i modelli di alcuni dispositivi in termini di matrici
scattering.
7.7.1 Attenuatore ideale
Un attenuatore ideale e un dispositivo reciproco adattato a entrambe le porte e un segnale
che lo attraversa subisce un'attenuazione AdB. La sua matrice S e dunque:
"
;j' #
0
A
e
[S ] = Ae;j' 0
(7.60)
dove A = 10;AdB=20 .
7.7.2 Isolatore
Un isolatore ideale, il cui simbolo e mostrato in Fig. 7.5, e un dispositivo non reciproco,
adattato ad entrambe le porte che permette il transito indisturbato del segnale dalla
porta 1 alla porta 2, mentre lo impedisce nel senso contrario.
La matrice S del dispositivo e:
0 0
[S ] = e;j' 0
(7.61)
Si noti che la non reciprocita del dispositivo emerge chiaramente dal fatto che S12 6= S21 .
Figura 7.5
Simbolo dell'isolatore ideale.
Costruttivamente un isolatore contiene una ferrite magnetizzata da un campo statico.
La potenza che incide sulla porta 2 e completamente dissipata nel dispositivo.
7.7.3 Circolatore
Il circolatore e un dispositivo non reciproco, il cui simbolo e riportato in Fig. 7.6. Esso
e adattato a tutte le porte e al suo interno la potenza circola senza attenuazione nel
verso nella freccia, ma e completamente dissipata nel verso opposto. La sua matrice S e
dunque:
2
;j' 3
0
0
e
0 75 :
[S ] = 64 e;j' 0
(7.62)
;
j'
0 e
0
Tale matrice e chiaramente non simmetrica, a causa della non reciprocita del componente. Si puo dimostrare che una struttura a tre porte, senza perdite e adattata e necessariamente non reciproca ed e un circolatore. Costruttivamente un circolatore contiene
1
2
3
122
7 { La matrice Scattering
1
3
2
Figura 7.6
Simbolo del circolatore ideale.
una ferrite magnetizzata da un campo statico, che e responsabile della non reciprocita
della struttura.
Si noti che chiudendo la porta 3 di un circolatore su un carico adattato, si ottiene una
struttura a due porte che si comporta come un isolatore, vedi Fig. 7.7. Infatti un segnale
incidente alla porta 1 transita verso la 2 senza essere inuenzato dal carico alla porta 3.
Invece un segnale incidente alla porta 2 viene indirizzato alla porta 3 dove si dissipa sul
carico adattato e nulla esce dalla porta 1.
3
1
2
Figura 7.7
Isolatore ottenuto chiudendo la
porta 3 di un circolatore su un carico adattato.
Un circolatore puo essere usato per realizzare un \diplexer" quando in un sistema
di comunicazione sia il trasmettitore che il ricevitore sono collegati alla stessa antenna,
come indicato in Fig. 7.8. E chiaro che il dispositivo funziona se e solo se S31 e veramente
molto piccolo.
7.7.4 Accoppiatore direzionale ideale
Un accoppiatore direzionale ideale, il cui simbolo e riprodotto in Fig. 7.9, e una struttura
a quattro porte adattata, reciproca, in cui le porte sono a due a due disaccoppiate. Con
una scelta opportuna dei piani di riferimento, la sua matrice S si puo scrivere:
2 0 p1 ; k2 jk
3
0
66 p1 ; k2 0
0 p jk 777 :
[S ] = 64 jk
1 ; k2 5
0 p 0
2
0
jk
1;k
0
(7.63)
x7.7 { Matrice scattering di alcuni dispositivi
123
TX
1
2
3
RX
Figura 7.8
Circolatore usato come diplexer.
La quantita
C = ;20 log10 k = ;20 log10 jS31j
(7.64)
e detta accoppiamento: vi sono accoppiatori da 3 dB (detti ibridi), da 10 dB, 20 dB, ecc.
1
1− k
2
2
jk
1 − k2
4
Figura 7.9
3
Simbolo di accoppiatore direzionale.
Altri parametri usati per caratterizzare un accoppiatore direzionale sono la direttivita
D:
(7.65)
D = ;20 log10 jjSS41 jj
e l'isolamento I :
31
I = ;20 log10 jS14 j:
(7.66)
L'accoppiamento C indica la frazione di potenza incidente alla porta 1 che viene mandata
alla porta di uscita 3. La direttivita e una misura della capacita dell'accoppiatore di
discriminare le onde incidenti alla porta 1 da quelle incidenti alla porta 2, specicando
quanto la porta 4 e isolata dalla 1.
L'isolamento I indica la stessa cosa ed evidentemente vale la relazione
I =D+C
(in dB):
(7.67)
Un accoppiatore ideale ha isolamento e direttivita innite.
Un accoppiatore direzionale e il cuore dell'analizzatore di reti (network analyzer), uno
strumento in grado di misurare direttamente i parametri scattering di un dispositivo.
Il concetto della misura e illustrato in Fig. 7.10. Eettuando il rapporto dei segnali
124
7 { La matrice Scattering
che escono dalle porte 3 e 4, e possibile risalire al valore del coeciente di riessione in
modulo e fase.
jk
L
1 − k 2V1+
4
jkV1+
3
1 − k2
jk
L
1
V1+
2
Principio della misura di un
coeciente di riessione con un accoppiatore
direzionale.
Figura 7.10
7.8 Esempi di analisi di strutture descritte da matrici S
In questa sezione si illustra, tramite alcun semplici esempi, l'uso della matrice scattering
per la caratterizzazione dei dispositivi.
7.8.1 Connessione in cascata di un doppio bipolo e di un carico
Calcolare il coeciente di riessione di un doppio bipolo, la cui porta 2 e chiusa su un
carico, vedi Fig. 7.11. La struttura complessiva e un carico con una sola porta ed e
quindi caratterizzato dallo scalare ;i:
12 S21 ;L
;i = S11 + 1S;
S22 ;L =
S12 S21 ;L =
= S11 ; S111S;22 ;SL +
(7.68)
22 ;L
= S11 ; det [S ] ;L :
1 ; S22;L
Si puo vedere che quando ;L = 0, ;i = S11 come e ovvio in base alla denizione dei
parametri scattering.
S’
ΓL
Γi
Figura 7.11
Doppio bipolo, la cui porta 2 e chiusa su un carico
x7.8 { Esempi di analisi di strutture descritte da matrici S
125
l
S’
S’’
A
S
Figura 7.12
_
S’’
B
Interconnessione di due doppi bipoli tramite una linea di lunghezza l.
Osserviamo anche che la relazione tra ;L e ;i e una trasformazione bilineare fratta.
7.8.2 Interconnessione di due doppi bipoli tramite un tratto di linea
Si consideri la struttura di Fig. 7.12, in cui due doppi bipoli sono interconnessi tramite un
tratto di linea di trasmissione. In pratica vi sono molti circuiti che si possono modellizzare
in questo modo. La matrice S della struttura complessiva si puo ricavare in due passi:
si sposta il piano di riferimento della struttura S 00 da B ad A
e;j 0 e;j 0 00 e;2j S 00 e;j !
S
00
00
11
12
[S ] = 0
1 S 0
1 = S2100 e;j S2200
si usano le (7.58) per connettere in cascata le due strutture.
Si ottiene
0 00 ;2j 0
(7.69)
S11 = S110 + 1S;12 SS110 eS 00 e;S221j
S21 =
S0
22 11
00 ;j
21 S21 e
1 ; S 0 S 00 e;2j
(7.70)
22 11
dove = kl = !l=vf e la lunghezza elettrica della linea.
Supponiamo che le matrici S dei due doppi bipoli non dipendano dalla frequenza, cioe
da . In pratica cio non e vero ma certamente la dipendenza in questione e molto piu
debole di quella dell'esponenziale. In tali condizioni e facile ricavare il graco del modulo
del coeciente di trasmissione complessivo S21().
Osserviamo che, posto
S1100 = jS1100 j ej' S220 = jS220 j ej'
il denominatore della (7.70) si esprime
' ' )
D() = 1 ; jS1100 j jS220 j e;j2(;
Il graco di D() nel piano complesso e ovviamente una circonferenza di centro 1 e raggio
jS1100 j jS220 j, illustrata in Fig.7.13a. Inoltre e noto che l'operazione
di inversione trasforma circonferenze in circonferenze. In particolare, D;1() descrive una circonferenza,
simmetrica rispetto all'asse reale con centro in
1
C=
0
1 ; jS22j2 jS1100 j2
11
22
11 + 22
2
126
7 { La matrice Scattering
ℑm
ℑm
ℜe
1
1-|S22'||S11''|
ℜe
1+|S22'||S11''|
Figura 7.13
(1-|S22'||S11''|)-1
(1+|S22'||S11''|)-1
A graco di D(); B graco di D;1().
|S21|
|S21|max
|S21|min
θmin
Figura 7.14
e raggio
R=
θmax
θ
Graco di jS21 ()j.
jS220 j jS1100 j
1 ; jS220 j2 jS1100 j2
Quindi il graco di jS21()j e la curva oscillante mostrata in Fig.7.14 dove
0
00
jS21 jMIN = 1 +jSj21Sj0 jSj j21Sj00 j
22 11
0
00
jS21jMAX = 1 ;jSj21Sj0 jSj j21Sj00 j
22 11
MIN = 21 ('11 + '22 + (2m + 1) )
MAX = 12 ('11 + '22 + 2m)
E' anche chiaro che dalle caratteristiche della curva jS21 ()j (ad esempio acquisita tramite
una misura) e possibile risalire alle caratteristiche delle discontinuita presenti sulla linea
e alla loro separazione.
Qualora le discontinuita sulla linea avessero un coeciente di riessione molto forte,
la struttura si comporterebbe come un ltro passabanda o rigettabanda.
x7.8 { Esempi di analisi di strutture descritte da matrici S
-
Figura 7.15
ΓL
Zr1
Zr2
127
A+
A
Cambiamento di impedenza di riferimento.
7.8.3 Cambiamento di impedenza di riferimento
Si consideri un carico caratterizzato tramite il suo coeciente di riessione rispetto a una
impedenza di riferimento Zr1. Si vuole calcolare il coeciente di riessione dello stesso
carico rispetto ad un'altra impedenza di riferimento Zr2. Possiamo far riferimento alla
Fig.7.15.
E' facile calcolare il coeciente di riessione rispetto a Zr2 passando attraverso l'impedenza:
+ ;L
ZA = Zr1 11 ;
;L
Zr2
;A; = ZZA ;
A + Zr 2
Sostituendo la prima nella seconda si puo ottenere un legame diretto tra ;A; e ;L.
Cio pero si puo anche ottenere applicando le (7.58) per analizzare la cascata delle
due discontinuita. La prima, determinata dalla giunzione tra le due linee ha matrice
scattering
0
q Zr
1
(1
+
;
)
;
F A
Zr
[S 0] = @ q Zr F
;;F
Zr (1 ; ;F )
+
+
+
2
1
2
1
dove ;F e il coeciente di riessione
Zr2
;F = ZZr1 ;
+Z
r1
r2
Esso e detto coeciente di Fresnel per l'analogia con il coeciente di riessione denito
in ottica all'interfaccia tra due mezzi indeniti.
Si noti che S120 e S210 sono solo apparentemente diversi: sostituendovi le espressioni di
;F si verica che sono uguali, come richiesto dalla reciprocita della struttura.
La seconda discontinuita e un carico con una sola porta e quindi la sua matrice S
coincide col coeciente di riessione ;L.
Applicando la (7.58) si trova
2
;A; = ;F + (1 ; ;F ) ;L = ;F + ;L
1 + ;F ;L 1 + ;F ;L
che e la formula cercata.
128
7 { La matrice Scattering
7.9 Matrice di trasmissione
Per le strutture per le quali e possibile individuare due \lati" con lo stesso numero N di
porte, che quindi si possono considerare come generalizzazione di doppi bipoli, e spesso
usata una caratterizzazione basata sulla matrice di trasmissione.
La matrice di trasmissione mette in relazione lo stato elettrico sui due lati della struttura, utilizzando la base delle onde di potenza. Con riferimento alla Fig. 7.16 si introduce
un unico asse z per i due lati della struttura e coerentemente con questo si introducono
onde di potenza progressive e regressive.
La caratterizzazione del dispositivo tramite la matrice di trasmissione [T ] e allora la
seguente:
0 + 1 0
... [T ] 1 0 [c+ ] 1
[
c
]
[
T
]
12 C B 2 C
B@ 1 CA = BB 11
CA @ ; A
(7.71)
@
;
.
[c1 ]
[
c
]
.
2
[T ] . [T ]
21
22
dove tutte le sottomatrici sono quadrate di dimensione N N .
lato 1
lato 2
1
1
[c1+ ]
[c2+ ]
[c1− ]
[c2− ]
N
N
Doppio bipolo generalizzato: denizione delle
onde progressive e regressive sui due lati della struttura.
Figura 7.16
Quando due strutture del tipo ragurato in Fig. 7.16 con matrici di trasmissione [T1 ]
e [T2] vengono connesse attraverso N porte come indicato in Fig. 7.17 la matrice della
struttura complessiva si trova da
[T ] = [T 0][T 00]
La comodita della matrice di trasmissione nasce proprio dalla semplicita di questa legge
di composizione.
Una caratteristica della matrice di trasmissione e che i suoi elementi non possono
essere deniti direttamente da equazioni di tipo circuitale, ma devono essere ricavati
algebricamente da altri gruppi di parametri, come quelli scattering.
Per ricavare la relazione che sussiste tra le matrici [T ] e [S ] di uno stesso dispositivo,
osserviamo innanzitutto che le onde di potenza progressive e regressive sono legate alle
x7.9 { Matrice di trasmissione
129
[T’’]
[T’]
[T]
Figura 7.17
onde incidenti e diuse da
Connessione di due dispositivi in cascata.
h +i
c1 = [a1 ]
h ;i
c1 = [b1 ]
h +i
c2 = [b2 ]
h ;i
c2 = [a2 ]
(7.72)
La caratterizzazione del dispositivo tramite la matrice [S ] e la seguente
0 [b ] 1 0 [S ] ... [S ] 1 0 [a ] 1
11
12 C
1
B
C
@ 1 A = B
@
A
(7.73)
@
A
.
[b2 ]
[
a
]
2
[S21] .. [S22 ]
Sostituiamo in questa le (7.72)
[c;1 ] = [S11 ][c+1] + [S12 ][c;2 ]
(7.74)
[c+2] = [S21 ][c+1] + [S22 ][c;2 ]
Dato che le sottomatrici [Sij ] sono quadrate, possiamo ricavare [c+1] dalla seconda delle
(7.74)
[c+1] = [S21 ];1[c+2] ; [S21 ];1[S22 ][c;2 ]
(7.75)
Essendo [c+1] espresso in funzione di [c+2] e [c;2 ], possiamo identicare le espressioni di
[T11 ] e [T12 ]. Sostituendo la (7.75) nella prima delle (7.74), ricaviamo
[c;1 ] = [S11 ][S21 ];1 [c+2] + [S12] ; [S11 ][S21 ];1[S22 ] [c;2 ]
da cui identichiamo le espressioni degli altri elementi della matrice [T ]
[T11 ] = [S21 ];1
[T12 ] = ;[S21 ];1 [S22 ]
[T21 ] = [S11 ][S21 ];1
[T22 ] = [S12 ] ; [S11 ][S21];1 [S22 ]
(7.76)
(7.77)
130
7 { La matrice Scattering
Ovviamente se la sottomatrice [S21 ] di una struttura non e invertibile, tale struttura non
possiede matrice di trasmissione. Un esempio e costituito dalla struttura di Fig. 7.18 se
K < N.
N porte
K porte
N porte
Figura 7.18
Struttura con 2N porte risultante dalla connessione
\back-to-back" di due sottostrutture con N +K porte ciascuna. Se K <
N la matrice di trasmissione della struttura completa non e denita.
La struttura risultante e perfettamente denita dalla sua matrice scattering [S ]. Si
puo vericare pero che la sottomatrice [S21 ] non e invertibile, per cui la matrice di
trasmissione [T ] non esiste. Infatti, consideriamo l'espressione del blocco [S21 ] dato dalla
(7.58). Osserviamo che le dimensioni dei vari fattori sono
[S210 ]
! KN
00
[S21 ]
! N K
([1] ; [S220 ][S1100 ]);1 ! K K
quindi la dimensione di [S21 ]e N N . Tuttavia questa matrice ha rango K al piu,
quindi ha determinante nullo se K < N . Dal punto di vista dell'algebra lineare, [S21 ]
rappresenta un operatore che trasforma vettori dello spazio vettoriale complesso C N in
vettori di C N attraverso C K . Quindi se K < N siamo in presenza di un'operazione di
proiezione, notoriamente non invertibile.
Per completezza diamo anche le relazioni inverse delle (7.77), che permettono di
calcolare la matrice [S ] a partire dalla [T ]:
[S11 ] = [T21 ][T11 ];1
[S12 ] = [T22 ] ; [T21 ][T11 ];1[T12 ]
[S21 ] = [T11 ];1
[S22 ] = ;[T11 ];1 [T12 ]
Capitolo 8
Linee di trasmissione nel dominio del tempo
8.1 Introduzione
Nei capitoli precedenti abbiamo discusso in grande dettaglio la tecnica di analisi dei
circuiti contenenti linee di trasmissione nel dominio della frequenza. Con questa tecnica
si e in grado di prevedere il comportamento di tali circuiti in presenza di segnali armonici.
E giunto il momento di esaminare il caso reale in cui i segnali hanno una dipendenza
temporale arbitraria. La soluzione di questo problema si ottiene con il metodo della
trasformata di Fourier, interpretando un segnale generico come una sovrapposizione di
segnali armonici.
Consideriamo un semplice circuito costituito da un generatore e un carico interconnessi
tramite una linea di trasmissione, come illustrato in gura (8.1). Supponiamo che la linea
sia caratterizzata da costante di propagazione k (!) e impedenza caratteristica Z1 (!),
funzioni genericamente complesse della frequenza. Anche il carico ZL e l'impedenza
interna del generatore sono impedenze generalmente complesse. Si vuole calcolare la
tensione sul carico vB (t) conoscendo la tensione a vuoto del generatore e (t).
Questo problema si puo schematizzare, come mostrato in gura (8.2), nel linguaggio
della teoria dei sistemi. La forma d'onda del generatore si interpreta come ingresso, la
tensione vB (t) come uscita. Il sistema e:
lineare, perche i parametri della linea k e Z1, nonche il carico ZL sono indipendenti
dalle tensioni e correnti nel circuito.
invariante rispetto al tempo, perche i suddetti parametri non dipendono dal tempo.
E noto che per i sistemi LTI la relazione di ingresso-uscita si puo esprimere nel dominio
del tempo
vB (t) =
oppure nel dominio della frequenza
Z +1
;1
tv (t ; ) e ( ) d
VB (!) = TV (!) E (!)
131
(8.1)
(8.2)
132
8 { Linee di trasmissione nel dominio del tempo
Zg
(t)
+
ZL
A
Figura 8.1
B
Circuito contenente una linea di trasmissione
AB che interconnette un carico e un generatore reali
e(t)
Figura 8.2
tv(t)
TV(ω)
vB(t)
Il circuito di gura (8.1) schematizzato come sistema lineare
dove la risposta all'impulso tv (t) e legata alla funzione di trasferimento da una trasformata di Fourier:
Z +1
1
TV (!) ej!t d!
(8.3)
tv (t) = 2
;1
La (8.2) fornisce la soluzione del nostro problema nella forma
Z
Z +1
1
1
j!t
TV (!) E (!) ej!td!
(8.4)
vB (t) = 2 VB (!) e d! = 2
;1
Naturalmente, la funzione di trasferimento TV (!) si ricava senza dicolta con i metodi
illustrati nei capitoli precedenti per lo studio delle linee nel dominio della frequenza. Si
trova
(8.5)
TV (!) = Z (!Z)A+(!Z) (!) 1 + ;1 (!) e;jk(!)l (1 + ;B (!))
A
g
A
E interessante l'interpretazione che si puo dare alla (8.4):
si decompone l'ingresso in una combinazione lineare di segnali armonici ej!t
Z +1
e (t) = 21
E (!) ej!t d!
(8.6)
;1
ciascuno con ampiezza E (!) d!.
dato che il sistema e LTI , il segnale in uscita e ancora armonico, con ampiezza
VB (!) d! = TV (!) E (!) d!.
sommando questi segnali armonici si ricava vB (t).
I segnali armonici ej!t costituiscono i \modi di risonanza" dei sistemi LTI , nel senso
che essi \transitano" attraverso il sistema subendo solo la moltiplicazione per un numero
compless, che e la funzione di trasferimento del sistema valutata alla frequenza !. Questa
proprieta spiega l'utilita dell'analisi di Fourier per l'analisi dei sistemi LTI .
x8.2 { La velocita di gruppo
133
(t)
t
Andamento temporale di un segnale modulato in ampiezza.
Si noti che l'inviluppo e lentamente variabile sul periodo della portante
Figura 8.3
8.2 La velocita di gruppo
In genere, l'integrale (8.4) si deve calcolare con tecniche numeriche come l'FFT . Qui
pero vogliamo innanzitutto mettere in evidenza il ruolo della linea di trasmissione e
quindi semplicheremo il modello di (8.1) supponendo Zg = 0, ZL = Z1, in modo che la
funzione di trasferimento diventi
TV (!) = e;jk(!)l
(8.7)
Supporremo inoltre che il segnale e (t) non si discosti troppo da un segnale armonico.
Sceglieremo in particolare
e (t) = m (t) cos !0t
(8.8)
dove m (t) (inviluppo) e un segnale che varia poco in un periodo T = 2=! del coseno
(portante).
Il segnale (8.8) vedi gura (8.3) e modulato in ampiezza e nelle condizioni appena
esposte e quasi-monocromatico.
Calcoliamo lo spettro di e (t). Detta M (!) la trasformata di m (t), si ha
E (!) = = fm (t) cos !0tg = 21 = fm (t)g = fcos !0tg =
= 21 M (!) f (! ; !0 ) + (! + !0)g =
(8.9)
= 12 M (! ; !0) + 12 M (! + !0) =
Queste funzioni sono rappresentate in gura (8.4).
Osserviamo che vB (t) e calcolabile dalla (8.4) come un integrale sulle frequenze negative e positive. In realta, dato che vB (t) e reale, il suo spettro e hermitiano, cioe
(8.10)
VB (;!) = VB (!)
134
8 { Linee di trasmissione nel dominio del tempo
|Ε(ω)|
Μ(ω)
−ω0
−ωc
ωc
ω0
Spettro di e (t). E indicato anche lo spettro
di m (t). Dato che !c << !0 , e (t) e quasi armonico
Figura 8.4
e l'integrale spettrale puo essere limitato al semiasse positivo delle frequenze. Infatti,
spezzando il dominio completo in due sottodomini si ha
Z0
Z +1
1
1
0t 0
0
j!
vB (t) = 2
VB (! ) e d! + 2
VB (!) ej!t d!
(8.11)
;1
0
dove la variabile di integrazione nel primo integrale e stata chiamata !0. Ponendo ora
! = ;!0 e usando la (8.10), troviamo
Z +1
Z +1
1
1
;
j!t
vB (t) = 2
VB (!) e d! + 2
VB (!) ej!t d! =
0
0
Z +1
= 2Ref 1
VB (!) ej!t d!g
(8.12)
2 0
Questa trasformazione e equivalente a introdurre il segnale analitico associato a vB (t),
che ha spettro nullo per ! < 0 e raddoppiato per ! > 0.
Il problema, a questo punto, e ricondotto alla valutazione di
Z +1
1
M (! ; !0) e;jk(!)l ej!t d!g
(8.13)
vB (t) = Ref 2
0
Tenendo conto del fatto che il segnale e quasi monocromatico, cioe il supporto del suo
spettro e un piccolo intorno di !0, si puo pensare di sviluppare la funzione k (!) in serie
di Taylor intorno a ! = !0
2 k dk
1
d
k (!) = k (!0) + d! (! ; !0) + 2 d!2 (! ; !0)2 +: : :
(8.14)
!
!
In generale, la costante di propagazione e complessa, k (!) = (!) ; j (!). Supponiamo
di troncare lo sviluppo precedente al secondo termine per la parte reale e al primo per
la parte immaginaria, ossia assumiamo
(!) ' (!0) + 0 (!0) (! ; !0)
(8.15)
0
0
x8.2 { La velocita di gruppo
135
(!) ' (!0)
Questo troncamento, apparentemente asimmetrico, e giusticato dall'andamento di k(!)
nei casi usuali.
Sostituiamo le (8.15) nella (8.13)
Z +1
vB (t) ' Refej(! t;(! )l)e;(! )l 21
M (! ; !0) e;j0(! )(!;! )l ej(!;! )td!g (8.16)
0
dove l'integrale e in realta esteso al solo supporto di M (! ; !0) che e per ipotesi un
piccolo intorno di ! = !0. Ponendo = ! ; !0, la precedente si riscrive
Z +1
M (
) e+j(t;0 (! )l)
d
g
(8.17)
vB (t) ' Refej(! t;(! )l) e;(! )l 21
;1
dove l'estremo inferiore e stato spostato a ;1 (senza cambiare il valore dell'integrale,
ovviamente) in modo da poter riconoscere l'antitrasformata di M (
) valutata in t ;
0 (!0) l:
vB (t) ' Refej(! t;(! )l)e;(! )l m (t ; 0 (!0) l)g =
= m (t ; 0 (!0) l) e;(! )l cos (!0t ; (!0) l)
(8.18)
La quantita 0 (!0 ) l ha le dimensioni di un tempo, per cui si puo porre
g (!0 ) = 0 (!0) l = v (l! )
(8.19)
g 0
dove g (!0 ) e il ritardo di gruppo e vg (!0) la velocita di gruppo
1
d!
(8.20)
vg (!0) = d = d (
!
)
d! !
Questi termini derivano il loro nome dal fatto che il segnale e (t) e costituito da un
\gruppo" di frequenze.
Ricordando inoltre la denizione di velocita di fase
vf (!0) = !(!0 )
(8.21)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
e del corrispondente ritardo di fase f (!0) = (!0 ) l, la (8.18) puo essere riscritta
!
!
l
l
;
(
!
)
l
cos !0 t ; v (! ) =
vB (t) ' m t ; v (! ) e
g 0
f 0
= m (t ; g (!0 )) e;(! )l cos (!0 (t ; f (!0)))
(8.22)
Di questa equazione possiamo dare la seguente interpretazione. Il segnale e (t) non e
monocromatico ma e costituito da un \pacchetto" di componenti armoniche, ciascuna
delle quali si presenta nella sezione B pesata dalla funzione di trasferimento. A causa dei
fenomeni di interferenza costruttiva e distruttiva che qui si vericano, tutto avviene come
se l'inviluppo m (t) si muovesse con la velocita di gruppo e la portante con la velocita
di fase. Naturalmente questa e solo un'interpretazione della (8.22), poiche inviluppo e
portante non sono due segnali con un'esistenza indipendente.
0
0
136
8 { Linee di trasmissione nel dominio del tempo
ω
ϕg
ω0
ϕf
β
Figura 8.5
Interpretazione geometrica di velocita di fase e di gruppo
Nelle applicazioni, l'informazione e associata all'inviluppo. Vediamo anche che, nel
limite in cui valgono le (8.15), l'inviluppo in B e una replica ritardata e attenuata dell'inviluppo in A e si dice che non si sono vericate distorsioni. Quindi una linea e un
sistema non distorcente quando, almeno sulla banda del segnale che vi si propaga, ha
una funzione di trasferimento con modulo costante e fase lineare. I termini successivi
dello sviluppo in serie (8.14) sono responsabili delle distorsioni. Essi non si possono
ovviamente trascurare quando la banda di e (t) non e piccola.
I concetti di velocita di fase e di gruppo si prestano a un'interpretazione geometrica.
Consideriamo una curva di dispersione come quella riportata in gura (8.5).
In base alle denizioni date, si ha
vf (!0) = tan 'f
vg (!0) = tan 'g
(8.23)
Si noti che il concetto sicamente piu rilevante tra i due tipi di velocita e quello della
velocita di gruppo. Infatti (quasi sempre) essa si puo interpretare come la velocita di
propagazione dell'energia elettromagnetica. Quando questa interpretazione e possibile
essa e sempre minore della velocita della luce nel vuoto, in accordo con la teoria della
relativita.
Osserviamo inne che il concetto di ritardo di gruppo puo essere denito sia per i
dispositivi a parametri distribuiti che per quelli a parametri concentrati. La denizione
generale e infatti
d arg (H (!))
g = ; d!
(8.24)
dove H (!) e la funzione di trasferimento del dispositivo. Si puo rilevare che la (8.19) e
in accordo con questa denizione. In termini generali, si manifesta un ritardo di gruppo
in quei casi in cui il dispositivo e in grado di immagazzinare energia. Ovviamente una
rete di resistenze ha funzione di trasferimento reale e quindi g = 0 in base alla (8.24).
8.3 Distorsioni
Si e visto nella sezione precedente che quando il segnale e quasi monocromatico e la
velocita di gruppo si puo ritenere costante sulla banda del segnale, questo (o meglio il
suo inviluppo) non viene distorto. In questa sezione discuteremo le distorsioni causate
x8.3 { Distorsioni
137
m(t)
1
e-1/2
t
T0
Figura 8.6
Inviluppo di un impulso gaussiano e denizione della sua durata T0
da una funzione di trasferimento con modulo costante e fase non lineare ma che puo
essere approssimata con una parabola sulla banda del segnale stesso. Quindi considereremo l'eetto del terzo termine nella (8.14) e pertanto supporremo che la costante di
propagazione si possa esprimere nella forma
(!) = 0 + 00 (! ; !0 ) + 21 000 (! ; !0)2
(8.25)
dove si e posto
0 = (!0)
d 00 = d!
!
000 =
0
d2 d!2 !0
e si assumera (!) = 0 per semplicita.
Ripetendo con qualche modica i calcoli che hanno portato alla (8.16) troviamo
Z +1
1
1
j
(
!
t
;
l
)
vB (t) ' Refe
[M (! + !0) + M (! ; !0)] e;j 00l(!;! ) 2 2 0
ej(t;0 l)(!;! ) d!g
(8.26)
0
1
2
0
0
0
0
2
0
Vediamo chiaramente che il termine di fase quadratico produce una distorsione, ma il
calcolo non si puo esplicitare per un inviluppo m (t) generico. Il caso piu semplice per
cui il calcolo si puo portare avanti analiticamente e quello di un impulso gaussiano, in
cui
2 !
t
(8.27)
m (t) = exp ; 2T 2
0
Il tempo T0 , che e la deviazione standard della gaussiana, puo essere usato per speccare
la durata dell'impulso, vedi gura (8.6). Utilizzando l'integrale notevole
p Z +1
;
x
jx
e
e dx = e; (8.28)
;1
2 2
2
(2 )2
138
8 { Linee di trasmissione nel dominio del tempo
si ottiene la spettro M (!)
2!2 !
T
0
M (!) = 2T0 exp ; 2
(8.29)
Osserviamo
che lo spettro dell'inviluppo e ancora gaussiano con deviazione standard pari
;
1
a T0 : in accordo con il principio di indeterminazione, un impulso breve ha una grande
banda e viceversa.
L'integranda della (8.26) e la somma di due termini. Nelle normali applicazioni la
durata dell'impulso e molto maggiore del periodo della portante, per cui !0T0 >> 1 e il
primo termine da un contributo del tutto trascurabile. Per lo stesso motivo, per quanto
riguarda il secondo, il limite inferiore dell'integrale puo essere spostato da 0 a ;1 senza
cambiare il valore.
Riscriviamo quindi la (8.26) nella forma:
Z +1
1
1
j
(
!
t
;
l
)
vB (t) ' Refe
M
(
) e;j 00 l
ej(t;0 l)
d
g =
2 2 ;1
Z +1
1
1
; (T +j00l)
ej (t;0 l)
d
g
j
(
!
t
;
l
)
(8.30)
= Refe
e
2 2
p
0
0
1
2
0
0
1
2
;1
2
0
0
2
0
2
0
0
Applicando la (8.28) con
= 12 (T02 + j000l)
= t ; 00 l
(8.31)
si trova
8
9
(
0 l)2 )=
< T0
(
t
;
vB (t) ' Re : q 2
exp fj (!0t ; 0 l)g exp ; 2 (T 2 + 0j 00l) ;
(8.32)
00
0
0
T0 + j0 l
Trasformiamo ora l'espressione all'interno della parentesi graa in modo da prendere la
parte reale in modo semplice. Osserviamo che il termine algebrico si puo riscrivere
82
;
!2 3 j arctan 00l 9
>
>
00
<
=
T
l
T
q 2 0 00 = 1 + j 02
=
= >41 + T02 5 e
>
T
:
;
0
0
T0 + j0 l
2
3
00 l !2 ; ;j arctan 00 l
T
= 41 + T02 5 e
(8.33)
0
"
!# 1
00l ; 2
1
2
1
4
1
2
0
2
0
1
2
0
2
0
Separando inoltre il modulo e la fase del termine esponenziale si perviene con semplici
calcoli all'espressione nale seguente:
!
(
2)
(
t
;
l=v
T
g (!0 ))
0
cos (' (t))
(8.34)
vB (t) = T (l) exp ;
2T02
dove la fase ' (t) vale
p !
!
2p
l
(
t
;
l=v
3l (8.35)
g (!0 )) 3(l=ld )sign (000 ) 1
' (t) = ! t ; v (! ) +
;
arctan
2
2
2T0
2
ld
f 0
1 + 3 lld
1
2
x8.3 { Distorsioni
139
Figura 8.7
Impulso gaussiano distorto al termine
della linea. Si noti la modulazione di frequenza spuria
e
r
l 2
p T02
(8.36)
3 00
l
=
d
ld
j0 j
Notiamo che il segnale al termine della linea e ancora gaussiano: cio e legato al fatto che la
trasformata di una gaussiana e una gaussiana e che la fase della funzione di trasferimento
e stata sviluppata al secondo ordine.
L'inviluppo si muove con la velocita di gruppo ma aumenta la sua varianza che da T02
diventa T 2 (l). Anche se la forma gaussiana e mantenuta, siamo in presenza di distorsione
perche la deviazione standard e cambiata.
La quantita ld e denita distanza di raddoppio poiche T (ld ) = 2T0 . Notiamo che ld
aumenta con la durata iniziale dell'impulso T0 , perche diminuisce la sua banda. Essa
aumenta inoltre se la dispersivita della linea migliora, ossia se j000j diminuisce. Notiamo
inoltre che il valore massimo dell'inviluppo diminuisce al crescere di l: si puo vericare
che l'energia nell'impulso non cambia al variare di l, coerentemente con il fatto che la
linea e stata supposta senza perdite.
Consideriamo ora il termine di fase e notiamo la dipendenza quadratica da t ; l=vg (!0):
Calcoliamo la frequenza istantanea
p
00
d'
t
;
l=v
g (!0 ) 3(l=ld )sign(0 )
! (t) = dt = !0 +
(8.37)
2
T02
1 + 3 lld
Essa varia linearmente ed e crescente o decrescente a seconda del segno di 000. Si e in
presenza di una modulazione di frequenza spuria (chirp), rappresentata in gura (8.7)
Notiamo che la linea di trasmissione e un dispositivo simmetrico, quindi se il segnale
(34) viene fatto propagare da z = l a z = 0 il segnale in uscita sara
!
(
t
;
l=v
g (!0 ))2
vA (t) = exp ;
cos(!0t)
2T 2
T (l) = T0 1 + 3
0
In altre parole e possibile comprimere un impulso sfruttando la dispersione della linea.
Ovviamente e necessario che il segnale da comprimere abbia una modulazione di frequenza (chirp) e che il segno di 000 sia appropriato. Rimuovendo la modulazione spuria
si ottiene la compressione.
140
8 { Linee di trasmissione nel dominio del tempo
z=0
t
z=l
t
Interferenza intersimbolica in un collegamento digitale su linea dispersiva.
Gli impulsi ricevuti sono cosi distorti che la parola trasmessa non e piu riconoscibile
Figura 8.8
Le considerazioni svolte per l'impulso gaussiano valgono qualitativamente in generale
per qualsiasi impulso. In sostanza la durata dell'impulso cresce durante la propagazione;
tuttavia, dato che la forma dell'impulso cambia, non e facile denire in modo preciso la
durata ne la velocita di propagazione dell'impulso.
8.4 Comunicazioni ottiche digitali
Come esempio di applicazione delle considerazioni svolte sopra, consideriamo un collegamento in bra ottica che sfrutti una modulazione digitale, per cui al valore logico "1" e
associata la trasmissione di un impulso e al valore "0" l'assenza di impulso. Se nel corso
della propagazione gli impulsi aumentano la loro durata, si puo vericare un'interferenza
intersimbolica per cui gli impulsi non sono piu riconoscibili dal ricevitore, come illustrato
in gura (8.8). Per quanticare il fenomeno, supponiamo che il ricevitore sia in grado
di riconoscere gli impulsi no a quando l'intervallo di tempo tra due successivi e pari
alla durata degli impulsi (deviazione standard) moltiplicata per un fattore r tipico del
ricevitore.
Chiamiamo BT il bit rate, cioe il numero di impulsi trasmessi al secondo. La condizione
di buon funzionamento si puo scrivere
1 rT (l)
BT
ossia, ricordando la (36)
BT r 1 00 2 = BT max
rT0 1 + BT l
0
2
0
Fissate le caratteristiche della bra e del ricevitore, ci si puo porre il problema di scegliere
la durata degli impulsi trasmessi in modo da massimizzare BT max. La gura (8.9) mostra
il graco di BT max(T0 ). Si puo spiegare facilmente la forma del graco. Se T0 e piccolo
la distanza di raddoppio ld e piccola, quindi il bit rate deve essere molto basso se si vuole
evitare l'interferenza intersimbolica. Al contrario, se T0 e grande la distanza di raddoppio
x8.5 { Linee di trasmissione ideali disadattate
141
BTmax
T0opt
T0
Figura 8.9
Dipendenza del bit rate massimo su
un collegamento digitale dalla durata degli impulsi
e grande, quindi la distorsione e piccola; tuttavia il bit rate deve essere basso per evitare
l'interferenza gia sul trasmettitore.
Si trova che esiste una durata ottimale degli impulsi
q
T0opt = j000j l
BT max (T0opt ) = p q1 00
2r j0 j l
Si noti che T0opt non dipende dalle caratteristiche del ricevitore ma solo dapquelle della
bra ottica. In queste condizioni la durata degli impulsi cresce del fattore 2 nel corso
della propagazione.
In pratica si verica che per bre ottiche in silice il parametro 000 si annulla a =
1: 3m. Ovviamente questo non signica che gli impulsi non subiscano distorsione, ma
che l'analisi svolta qui non e piu applicabile. Infatti se 000 6= 0 e lecito trascurare i
termini di ordine superiore nella (25), ma se 000 = 0 occorre tener conto almeno del
termine cubico che da luogo a un tipo diverso di distorsione. In ogni caso e sempre
conveniente far funzionare il sistema in queste condizioni e per questo motivo la banda
centrata intorno a = 1: 3m e detta seconda nestra per la sua importanza nelle
comunicazioni ottiche.
8.5 Linee di trasmissione ideali disadattate
Nelle sezioni precedenti abbiamo sostanzialmente discusso il comportamento della linea
di trasmissione, supponendo che le terminazioni fossero adattate. In questa sezione
esamineremo l'eetto del disadattamento del carico e del generatore ma, per procedere
con gradualita, supporremo la linea ideale, cioe non dispersiva.
8.5.1 Soluzione generale delle equazioni delle linee
Come esempio illustrativo della tecnica che useremo, ricaviamo innanzitutto la soluzione
generale delle equazioni delle linee, ottenuta nella sezione 1.4 con un cambiamento di
variabile.
142
8 { Linee di trasmissione nel dominio del tempo
Sappiamo che nel dominio ! la soluzione generale si scrive
V (z;!) = V0+ (!) exp(;jkz) + V0; (!) exp(jkz)
con
I (z;!) =
Y1V0+ (!) exp(;jkz) ; Y1V0; (!) exp(jkz)
p
k = ! LC = v!
f
s
Y1 = LC
(8.38)
(8.39)
Notiamo che V0+ (!) e V0; (!) sono due costanti arbitrarie rispetto a z ma possono dipendere dal parametro !, per cui esse sono da considerarsi due funzioni arbitrarie di !.
La loro espressione puo essere denita quando si precisano le condizioni di carico e di
alimentazione. Calcoliamo dunque l'espressione della tensione nel dominio del tempo
Z +1
v (z;t) = 21
V (z;!) exp(j!t)d! =
;1
#
Z +1 "
1
z
z
;
+
= 2
V (!) exp(;j v !) + V0 (!) exp(+j v !) exp(j!t)d! =
;1 0
f
f
"
!
!
! !#
Z
+1 +
z
z
1
;
V (!) exp j t ; v ! + V0 (!) exp j t + v ! d! =
= 2
;1 0
f
f
!
!
= v0+ t ; z + v0; t + z
(8.40)
vf
vf
dove v0 sono le antitrasformate di V0 (!).
Inoltre, per quanto riguarda la corrente, dato che Y1 non dipende da !, e immediato
scrivere
!
!
z
z
;
+
(8.41)
i (z;t) = Y1v0 t ; v ; Y1v0 t + v
f
f
Abbiamo quindi ritrovato le espressioni ottenute, per altra via, nella sezione 1.4.
Osserviamo che la soluzione generale risulta chiaramente costituita di due onde che si
propagano in direzioni opposte. Nel dominio ! questo comportamento e indicato dallo
sfasamento proporzionale alla frequenza che caratterizza le due componenti progressiva
e regressiva. A sua volta questo comportamento e direttamente legato al fatto che la
velocita di fase non dipende dalla frequenza.
8.5.2 La linea disadattata
Arontiamo ora il problema centrale di questa sezione, illustrato in gura (8.10). Si noti
che per semplicita si e assunto che sia l'impedenza interna del generatore, sia quella di
carico, siano delle resistenze pure, e quindi indipendenti dalla frequenza. Supponiamo
di dover calcolare la tensione sul carico vB (t). Applicando la tecnica usuale, troviamo
vB (t) come antitrasformata di Fourier:
Z +1
1
vB (t) = 2
VB (!) exp(j!t)d! =
;1
x8.5 { Linee di trasmissione ideali disadattate
l
Rg
(t)
+
Z∞ , v
A
Figura 8.10
dove
e
143
RL
B
Circuito elementare, comprendente una linea ideale disadattata
VB (!) = VB+ (1 + ;B ) = VA+ exp(;j! ) (1 + ;B )
(8.42)
VA+ = 1 +VA; = 1 +1; Z Z+A R E (!)
(8.43)
A
A A
g
dove E (!) e la trasformata della tensione a vuoto del generatore e(t) e = l=vf e il
tempo di transito sulla linea. Le espressioni precedenti comprendono sia impedenze sia
coecienti di riessione. E' conveniente eliminare le prime per ottenere un'espressione
omogenea.
Poniamo dunque
+ ;g
1 + ;A
Z
Rg = Z1 11 ;
(8.44)
A = Z1
;g
1 ; ;A
dove ;g e il coeciente di riessione di tensione dell'impedenza interna del generatore.
Si puo direttamente vericare che vale la relazione
ZA = 1 ; ;g 1 + ;A
(8.45)
ZA + Zg
2 1 ; ;A;g
e, ricordando che ;A = ;B exp(;j 2! ), la (8.42) diventa
1
VB (!) = E (!) 1 ;2 ;g (1 + ;B ) exp(;j! ) 1 ; ; ; exp(
(8.46)
;j 2! )
g B
Si noti che, per le ipotesi fatte su carico e generatore, ;g e ;B non dipendono dalla
frequenza. Per calcolare la antitrasformata si possono ora seguire due strade alternative
che permettono di scrivere la soluzione in due forme radicalmente diverse. La prima
mette in evidenza l'aspetto dinamico del fenomeno, la seconda produce una descrizione
in termini di risonanze, ossia di stati stazionari.
Il diagramma a traliccio
Consideriamo l'ultima frazione nella (8.42) e osserviamo che essa si puo sviluppare col
teorema del binomio:
(1 ; ;g ;B exp(;j 2! ));1 = 1 + ;g ;B exp(;j 2! ) + ;2g ;2B exp(;j 4! )+: : : (8.47)
144
8 { Linee di trasmissione nel dominio del tempo
Rg
(t)
+
Figura 8.11
Circuito relativo alla denizione della surge impedance
Lo sviluppo e sicuramente convergente se il carico e passivo e l'impedenza interna del
generatore e una vera resistenza, perche in tal caso la serie geometrica ha ragione minore
di 1. Sostituendo lo sviluppo nella (8.42) si trova
VB (!) = E (!) 1 ;2 ;g (1 + ;B ) exp(;j! )
n
o
1 + ;g ;B exp(;j 2! ) + ;2g ;2B exp(;j 4! )+: : :
(8.48)
e antitrasformando termine a termine:
n
o
vB (t) = 1 ;2 ;g (1 + ;B ) e(t ; ) + ;g ;B e(t ; 3 ) + ;2g ;2B e(t ; 5 )+: : :
(8.49)
Apparentemente la soluzione e data nella forma di una serie innita. In realta, in genere,
si e interessati a calcolare vB (t) per 0 t tmax, cioe all'interno di una certa nestra
di osservazione. Naturalmente la funzione e(t) e causale, cioe e nulla per argomento
negativo, quindi, ssato un tempo t tmax vi e solo un numero nito di termini che
da contributo. Cio si spiega facilmente riconoscendo che ciascun termine della somma,
diciamo
1 ; ;g ;n;n e(t ; (2n + 1) ) (1 + ; )
(8.50)
B
2 g B
rappresenta un'onda che ha percorso 2n + 1 volte il tratto AB in un senso e nell'altro,
riettendosi n + 1 volte sull'estremita B (carico) e n volte sull'estremita A (generatore).
Inoltre il fattore (1 + ;B ) esprime il fatto ben noto che la tensione totale in B e la
somma delle componenti progressiva e regressiva. Allora, se n e abbastanza grande,
tmax ; (2n + 1) e negativo e tutti i termini successivi non danno contributo.
Per interpretare il primo fattore (1 ; ;g )=2 conviene riscriverlo in termini di impedenze,
Si trova
1 ; ;g = Z1
(8.51)
2
Rg + Z1
Questa funzione si interpreta immediatamente come il rapporto di partizione vA (t) =e(t)
per il circuito di gura (8.11) in cui la linea e innitamente lunga. Questo circuito si
applica anche nel caso in esame di gura (8.10) ma solo per t 2 , perche in tal caso il
segnale lanciato da A, pur avendo raggiunto l'estremita B , produce un eco che ritorna
in A solo a t = 2 . Quindi prima di questo tempo il generatore non puo "sapere" se la
linea e innita oppure no. Possiamo dire che Z1 e l'impedenza di ingresso della linea
per t 2 e questo giustica il nome di "surge impedance" che viene a volte usato per
indicare Z1.
x8.5 { Linee di trasmissione ideali disadattate
145
Zg
e(t)
+
ZL
A
B
z
1-Γg e(t)
2
ΓB
Γg
ΓB
Γg
t
Figura 8.12
Diagramma a traliccio per il circuito di gura (8.10)
Sulla base di questa interpretazione e possibile tracciare un diagramma spazio-temporale, chiamato "diagramma a traliccio" e riportato in g. (8.12), che permette di scrivere
direttamente l'espressione del transitorio senza prima calcolare la risposta in frequenza.
Supponiamo che la tensione a vuoto del generatore sia un segnale di durata nita
T0 . A seconda della lunghezza della linea, e quindi del tempo di transito si possono
vericare due condizioni diverse.
; Se < 12 T0 i supporti delle funzioni e(t ; (2n + 1) ), per valori successivi di n, sono
parzialmente sovrapposti; questa condizione e detta di riverbero.
; Se > 12 T0 i supporti delle funzioni e(t ; (2n + 1) ), sempre per valori successivi di
n, sono disgiunti e si parla di echi multipli.
Le gure 8.13 e 8.14 illustrano le due condizioni nel caso in cui e(t) sia un impulso
rettangolare di valore 1V. La linea tratteggiata e il graco della tensione che si avrebbe
sul carico se questo fosse connesso direttamente al generatore. La linea continua e il
graco della tensione vB (t) quando e' presente la linea di trasmissione. La sua lunghezza
si deduce dal ritardo ( ) con cui appare il fronte di salita dell'impulso.
Si noti che gli echi successivi sono di ampiezza sempre piu piccola poiche la ragione
della serie geometrica e piu piccola di uno.
Avendo introdotto il diagramma a traliccio per il calcolo di vB (t), possiamo utilizzarlo
per calcolare anche la tensione all'estremita in A e in un punto intermedio C . La gura
(8.15) mostra il diagramma relativo. La tensione vA (t) si scrive subito
vA(t) = 1 ;2 ;g fe(t) + ;B (1 + ;g )e(t ; 2 )+
146
8 { Linee di trasmissione nel dominio del tempo
Time domain response Max [ Vg(t) ] = 1
1
VL(t) (nat)
0.5
0
-0.5
-1
0
0.1
0.2
0.3
0.4
0.5
t / T0
0.6
0.7
0.8
0.9
1
Tensione sul carico in condizioni di echi
multipli ( > 21 T0 ) (Zg = 10
;Z1 = 150
;ZL = 300
)
Figura 8.13
o
+;2B ;g (1 + ;g )e(t ; 4 ) + : : :
mentre la tensione vC (t) e data da:
vC (t) = 1 ;2 ;g fe(t ; c) + ;B e(t ; (2 ; c))+
o
+;B ;g e(t ; (2 + c)) + ;2B ;g e(t ; (4 + c)) + : : :
(8.52)
(8.53)
Si noti che le tensioni progressive e regressive in C non sono simultanee e cio spiega
l'assenza di un fattore come 1 + ;B o 1 + ;g .
Se il circuito contiene piu discontinuita, il diagramma a traliccio si complica enormemente e diventa presto inutilizzabile.
Soluzione in termini di risonanze
Riprendiamo la (8.46) e proponiamoci di valutare direttamente l'integrale di antitrasformazione con i metodi dell'analisi complessa. Si deve dunque valutare
Z +1 E (!)
exp(j!t)
1
(1
;
;
vB (t) = 2
g ) (1 + ;B ) exp(;j! )
1 ; ;g ;B exp(;j 2! ) d! (8.54)
;1 2
Il cammino di integrazione corre sull'asse reale come indicato in Fig. 8.16, ma puo essere
completato nel semipiano superiore con un semicerchio di raggio tendente all'innito in
modo da ottenere un cammino chiuso e applicare il teorema dei residui. E' immediato
vericare che tale semicerchio non da contributo all'integrale.
x8.5 { Linee di trasmissione ideali disadattate
147
Time domain response Max [ Vg(t) ] = 1
1
VL(t) (nat)
0.5
0
-0.5
-1
0
0.1
0.2
0.3
0.4
0.5
t / T0
0.6
0.7
0.8
0.9
1
Tensione sul carico in condizioni di
riverbero ( < 12 T0 ) (Zg = 10
;Z1 = 150
;ZL =
300
)
Figura 8.14
Le singolarita dell'integranda, oltre a quelle di E (!), sono indicate con una crocetta.
Si tratta di poli semplici associati ai valori di ! in cui si annulla il denominatore della
(8.54)
1 ; ;g ;B exp(;j 2! ) = 0
(8.55)
La soluzione di questa equazione e
1 [log j; ; j + j (arg (; ; ) + n 2)] =
!n = 2j
B g
B g
= 21 (arg (;B ;g ) + n 2) ; j 21 log j;B ;g j
(8.56)
con n = 0; 1; 2 . . .
Si ricordi che j;B ;g j 1, per cui queste singolarita, in numero innito, hanno tutte la
stessa parte immaginaria non negativa. Cio e coerente con il fatto che il sistema e stato
assunto essere privo di guadagno.
Osserviamo che quando ;B ;g > 0 (cioe se Rg e Rl sono entrambe maggiori o entrambe
minori di Z1), il polo che corrisponde a n = 0 ha parte reale nulla. Nel caso invece in
cui ;B ;g < 0 (cioe se Z1 e compreso nell'intervallo Rg , RB ) i poli sono sempre spaziati
(per quanto riguarda la loro parte reale) di = e sono disposti simmetricamente rispetto
all'asse immaginario.
148
8 { Linee di trasmissione nel dominio del tempo
A
C
B
z
τC
1-Γg
(1+ΓB)e(t-τ)
2
1-Γg
ΓB(1+Γg)e(t-2τ)
2
1-Γg
ΓgΓB(1+ΓB)e(t-3τ)
2
-Γg Γ2 Γ (1+Γ )e(t-4τ)
g
B g
2
t
Diagramma a traliccio che illustra il calcolo della tensione
alle estremita A e B della linea nonche in un punto intermedio C
Figura 8.15
ℑm ω
ℜe ω
Cammino di integrazione nel piano complesso ! e posizione delle singolarita dell'integranda
Figura 8.16
Calcoliamo ora i residui nei poli !n. In base alla denizione, e applicando la regola di
de l'H^ospital, si trova
! ; !n
1
1
Rn = !lim
(8.57)
!!n 1 ; ;g ;B e;j 2! = !lim
!!n ;;g ;B e;j 2! (;j 2 ) = j 2
Se supponiamo che E (!) sia una funzione priva di singolarita al nito (funzione intera),
il che accade se e(t) ha durata limitata, allora non vi sono altre singolarita e la risposta
vB (t) si puo scrivere
vB (t) = 2j
X
n
+
X1
Res(Integranda; !n) = 21 (1 ; ;g ) (1 + ;B )
E (!n)e+j!n(t; )
n=;1
(8.58)
x8.5 { Linee di trasmissione ideali disadattate
Z∞
Figura 8.17
C
149
RL
Linea di trasmissione che alimenta una porta logica
Quando si esprime la soluzione in questo modo si rappresenta la risposta dinamica del sistema in termini delle sue risonanze proprie. Si tratta di una rappresentazione alternativa
ma del tutto equivalente a quella delle riessioni multiple.
8.5.3 Interconnessioni reali
In un problema di interconnessione concreto i vari meccanismi di distorsione che abbiamo
considerato separatamente saranno presenti simultaneamente. Limitandoci a un breve
elenco, possiamo ricordare:
Il carico su cui la linea e chiusa non e indipendente dalla frequenza. Quindi i vari
echi multipli hanno forma diversa gli uni dagli altri e dal segnale incidente. Un
esempio tipico e quello di una linea che alimenta una porta logica, caratterizzata da
una capacita di ingresso, come illustrato in Fig.8.17.
La resistenza in parallelo a C e Req = (RLZ1) = (RL + Z1), quindi la costante di
tempo del gruppo e CReq . In generale si puo dire che gli echi hanno fronti di salita
e discesa piu arrotondati di quelli del segnale incidente, poiche il carico si comporta
sostanzialmente come un ltro passabasso.
La non idealita della linea di trasmissione si manifesta nel fatto che sia il segnale
incidente sul carico, sia gli echi si distorcano nel corso della propagazione.
Spesso, come ad esempio nel caso dei circuiti stampati, vi sono molte linee su
una stessa piastra. Queste linee si possono considerare indipendenti solo in prima approssimazione. Un modello piu accurato le tratta come linee di trasmissione
multiconduttore in cui si manifestano eetti di diafonia (cross-talk).
Inne molto spesso i carichi connessi alle linee di trasmissione sono non lineari.
Questo crea distorsioni ancora piu violente, che si possono studiare solo con tecniche
numeriche molto sosticate.