Franco Zappa
Elettronica
per la progettazione di circuiti con diodi, transistori MOSFET,
amplificatori operazionali, campionatori S&H, convertitori DAC e ADC,
integrati digitali CMOS, reti combinatorie e sequenziali
Franco Zappa
Elettronica
per la progettazione di circuiti con diodi, transistori MOSFET, amplificatori operazionali,
campionatori S&H, convertitori DAC e ADC, integrati digitali CMOS, reti combinatorie e
sequenziali
Copyright © 2014, EdiSES S.r.l. – Napoli
9 8 7 6 5 4 3 2 1
2017 2016 2015 2014
Le cifre sulla destra indicano il numero e l’anno dell’ultima ristampa effettuata
Prof. Franco Zappa
Dipartimento di Elettronica, Informazione e Bioingegneria
Politecnico di Milano
Fotocomposizione: EdiSES srl – Napoli
Stampato presso la: Print Sprint srl - Napoli
Per conto della:
EdiSES srl – Piazza Dante, 89 – 80135 Napoli
Tel. 081/7441706-07 Fax. 081/7441705
http://www.edises.it
ISBN 978 88 7959 8118
E-mail: [email protected]
F. Zappa
Elettronica
Indice
1
Segnali e Sistemi elettronici ........................................................................................ 1
1.1
1.2
1.3
1.4
2
Semiconduttori........................................................................................................... 11
2.1
2.2
2.3
2.4
2.5
2.6
2.7
3
Corrente Elettrica ........................................................................................................... 11
Semiconduttori Puri ....................................................................................................... 14
Semiconduttori Drogati .................................................................................................. 19
Correnti di Deriva e di Diffusione ................................................................................. 23
Giunzione P-N ............................................................................................................... 25
Polarizzazioni Inversa e Diretta ..................................................................................... 28
Esercizi .......................................................................................................................... 31
Diodo ........................................................................................................................... 33
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
4
Nascita dell’Elettronica .................................................................................................... 1
Segnali e Sistemi .............................................................................................................. 3
Circuiti Analogici e Digitali ............................................................................................. 5
Componenti...................................................................................................................... 8
Invenzione dei primi diodi ............................................................................................. 33
Caratteristica V-I dei diodi a giunzione ......................................................................... 34
Punto di lavoro del diodo ............................................................................................... 38
Modellizzazione del diodo ............................................................................................. 40
Analisi di piccolo segnale del diodo .............................................................................. 46
Linearizzazione della caratteristica ................................................................................ 50
Circuiti di taglio e vincolo ............................................................................................. 53
Circuiti con diodi e condensatori ................................................................................... 55
Trasformatori ed Alimentatori ....................................................................................... 63
Raddrizzamento a singola semionda .............................................................................. 66
Raddrizzamento a doppia semionda............................................................................... 72
Stabilizzazione con Zener .............................................................................................. 74
Esercizi .......................................................................................................................... 78
Transistore MOSFET ............................................................................................... 83
4.1
4.2
Struttura del Transistore MOS ....................................................................................... 83
Principio di Funzionamento ........................................................................................... 84
4.2.1
4.2.2
4.2.3
4.2.4
4.3
4.4
Processo di Fabbricazione.............................................................................................. 94
Analisi Linearizzata ....................................................................................................... 97
4.4.1
4.4.2
4.4.3
4.4.4
4.4.5
Transconduttanza................................................................................................................. 97
Resistenza di Drain ............................................................................................................ 100
Capacità parassite .............................................................................................................. 102
Comportamento sul Segnale.............................................................................................. 104
Frequenza di Transizione .................................................................................................. 106
4.5
Il Transistore come Amplificatore Lineare .................................................................. 106
4.6
4.7
Il Transistore come Interruttore ................................................................................... 118
Esercizi ........................................................................................................................ 124
4.5.1
5
Curve Caratteristiche ........................................................................................................... 89
Transistori NMOS e PMOS ................................................................................................ 90
Transistori ad arricchimento e svuotamento ....................................................................... 93
Simboli Circuitali ................................................................................................................ 94
Stadio Differenziale ........................................................................................................... 114
Analisi in frequenza ................................................................................................. 133
5.1
Transitori RC ............................................................................................................... 133
5.1.1
Tempo di acquisizione....................................................................................................... 135
Indice
5.2
5.3
Risposta in Frequenza .................................................................................................. 136
Trasformata di Laplace ................................................................................................ 137
5.3.1
5.3.2
5.3.3
5.3.4
5.3.5
5.3.6
5.3.7
5.4
Circuiti Elettronici ....................................................................................................... 141
5.5
Diagrammi di Bode ...................................................................................................... 148
5.4.1
5.5.1
5.5.2
5.5.3
5.5.4
5.5.5
5.5.6
5.5.7
5.6
5.7
5.8
5.9
Costante ............................................................................................................................. 150
Polo reale ........................................................................................................................... 150
Zero reale ........................................................................................................................... 151
Polo nell’origine ................................................................................................................ 153
Zero nell’origine ................................................................................................................ 153
Poli complessi coniugati .................................................................................................... 154
Zeri complessi coniugati .................................................................................................... 156
Metodo semplificato .......................................................................................................... 163
Filtro passa-banda. ............................................................................................................. 166
Da Bode a Laplace ....................................................................................................... 167
Amplificatori ........................................................................................................... 173
6.1
6.2
6.3
Stadi Amplificanti ........................................................................................................ 173
Amplificatori Differenziali .......................................................................................... 175
Retroazione .................................................................................................................. 177
6.3.1
6.3.2
6.4
6.5
6.6
6.7
Invenzione della Retroazione ............................................................................................ 177
Proprietà dei Circuiti Reazionati Ideali ............................................................................. 178
Reazioni Negativa e Positiva ....................................................................................... 179
Effetto della Reazione sulla Banda .............................................................................. 181
Amplificatore Operazionale (OpAmp) ......................................................................... 183
6.6.1
6.6.2
6.6.3
6.6.4
6.6.5
7
Condizioni Iniziali non nulle ............................................................................................. 148
Considerazioni Pratiche ............................................................................................... 156
Poli e Zeri di un Circuito.............................................................................................. 158
Metodo delle Costanti di Tempo .................................................................................. 161
5.8.1
5.8.2
6
Definizione......................................................................................................................... 137
Regione di convergenza..................................................................................................... 137
Inverso della trasformata di Laplace ................................................................................. 137
Trasformata di Laplace bilaterale ...................................................................................... 138
Applicazioni della trasformata di Laplace......................................................................... 138
Proprietà della Trasformata di Laplace ............................................................................. 139
Trasformata di Laplace di alcune funzioni comuni ........................................................... 140
Parametri dell’OpAmp ideale ............................................................................................ 184
Parametri dell’OpAmp Reale ............................................................................................ 185
Architettura Interna dell’OpAmp ...................................................................................... 186
Caratteristiche in Frequenza ad Anello Aperto dell’OpAmp ............................................ 188
Stabilità degli OpAmp non compensati e decompensati................................................... 192
Conclusioni .................................................................................................................. 192
Circuiti lineari con OpAmp ................................................................................... 193
7.1
Configurazioni di Base ................................................................................................ 193
7.1.1
7.1.2
7.1.3
7.1.4
7.1.5
7.2
Integratori e Derivatori................................................................................................. 198
7.2.1
7.2.2
7.2.3
7.2.4
7.3
Integratore ideale ............................................................................................................... 199
Integratore reale ................................................................................................................. 199
Derivatore ideale ................................................................................................................ 201
Derivatore reale.................................................................................................................. 201
Convertitori di Tensione e di Corrente ......................................................................... 203
7.3.1
7.3.2
7.4
7.5
Configurazioni invertente .................................................................................................. 193
Configurazioni non invertente ........................................................................................... 194
Sommatore Invertente........................................................................................................ 195
Sottrattore (amplificatore delle differenze) ....................................................................... 195
Amplificatore per Strumentazione .................................................................................... 197
Convertitore Corrente-Tensione ........................................................................................ 203
Convertitore Tensione-Corrente ........................................................................................ 203
Riferimenti di Tensione ............................................................................................... 206
Classificazione dei FILTRI .......................................................................................... 206
F. Zappa
7.6
Elettronica
Filtri Attivi del Primo Ordine....................................................................................... 208
7.6.1
7.6.2
7.6.3
7.6.4
7.6.5
7.7
Filtri Butterworth ......................................................................................................... 212
7.7.1
7.7.2
7.7.3
7.7.4
7.8
7.9
7.10
7.11
8
Filtri Chebyschev ......................................................................................................... 216
Filtri Bessel .................................................................................................................. 217
Filtri Ellittici (Cauer) ................................................................................................... 218
Esercizi ........................................................................................................................ 219
Raddrizzatori di Precisione .......................................................................................... 231
8.1.1
8.1.2
8.1.3
8.2
8.3
Trigger di Schmitt invertente ............................................................................................ 238
Trigger di Schmitt non invertente ..................................................................................... 240
Confronto tra Comparatore e Trigger ............................................................................... 240
Generatori di Forme d’Onda ........................................................................................ 241
8.4.1
8.4.2
8.4.3
8.4.4
8.4.5
8.4.6
8.4.7
8.5
Rivelatore di zero .............................................................................................................. 236
Rivelatore di livello ........................................................................................................... 237
Comparatore a finestra (window comparator) .................................................................. 238
Comparatore con isteresi (Trigger di Schmitt) ............................................................. 238
8.3.1
8.3.2
8.3.3
8.4
Diodo di precisione ........................................................................................................... 231
Raddrizzatori a semionda .................................................................................................. 232
Raddrizzatore ad onda intera ............................................................................................. 234
Comparatori ................................................................................................................. 235
8.2.1
8.2.2
8.2.3
Oscillatori sinusoidali ........................................................................................................ 241
Oscillatore a sfasamento.................................................................................................... 242
Oscillatore a ponte di Wien ............................................................................................... 244
Oscillatori a tre punti ......................................................................................................... 244
Generatore di onda rettangolare (multivibratore astabile) ................................................ 246
Generatore di impulsi rettangolari (multivibratore monostabile) ..................................... 247
Generatore di segnale triangolare...................................................................................... 249
Esercizi ........................................................................................................................ 250
Caratteristiche degli OpAmp ................................................................................. 257
9.1
Caratteristiche Elettriche .............................................................................................. 257
9.1.1
9.1.2
9.2
9.3
9.4
9.5
9.6
Compensazione della Corrente di Bias ............................................................................. 260
Compensazione dell’Offset di Tensione VOS .................................................................. 261
Alimentazioni .............................................................................................................. 261
Correnti di Uscita ......................................................................................................... 264
Risposta al “Grande Segnale” ...................................................................................... 265
Risposta al “Piccolo Segnale” ...................................................................................... 266
9.5.1
9.5.2
9.5.3
9.5.4
10
Filtro passa-basso Butterworth del primo ordine .............................................................. 212
Filtro passa-basso Butterworth del secondo ordine .......................................................... 213
Filtri passa basso Butterworth di ordine qualsiasi ............................................................ 214
Filtri di Butterworth passa alto, passa banda e notch........................................................ 215
Circuiti nonlineari con OpAmp.............................................................................. 231
8.1
9
Filtro passa-basso con guadagno infinito (Integratore invertente) ................................... 208
Filtro passa-basso con guadagno finito ............................................................................. 210
Filtro passa-alto con guadagno finito ................................................................................ 210
Filtro passa-banda.............................................................................................................. 211
Phase Shifter ...................................................................................................................... 211
Settling-Time ..................................................................................................................... 266
Risposta in Frequenza al Piccolo Segnale......................................................................... 267
Compensazione a Polo Dominante (Diretta ed alla Miller) .............................................. 267
Compensazione Polo-Zero ................................................................................................ 269
Esercizi ........................................................................................................................ 271
Stabilità e compensazione ....................................................................................... 281
10.1
10.2
Risposta in Frequenza .................................................................................................. 281
Compensazione “interna” degli OpAmp ...................................................................... 282
10.2.1
10.2.2
10.2.3
10.2.4
Compensazione a polo dominante (diretta e alla Miller) .................................................. 282
Compensazione Polo-Zero ................................................................................................ 286
Compensazione a due poli................................................................................................. 288
Compensazione Feedforward ............................................................................................ 289
Indice
10.3
Compensazione “Esterna” degli OpAmp ..................................................................... 290
10.3.1
10.3.2
10.3.3
10.3.4
10.4
Configurazione Non Invertente ......................................................................................... 290
Criteri di stabilità ............................................................................................................... 291
Condizione limite di MF=45° ............................................................................................ 292
Configurazione Invertente ................................................................................................. 294
Effetto della Capacità in Retroazione........................................................................... 297
10.4.1
10.4.2
10.4.3
10.4.4
Configurazione Non Invertente ......................................................................................... 297
Configurazione Invertente ................................................................................................. 300
Integratore .......................................................................................................................... 301
Derivatore .......................................................................................................................... 304
10.5
Effetto della Capacità in Ingresso ................................................................................ 305
10.6
10.7
10.8
10.9
Resistenza in Uscita e Capacità di Carico .................................................................... 314
Compensazione con Feedback Negativo...................................................................... 318
Compensazione con Feedback Positivo ....................................................................... 322
Compensazione con Anticipo di Reazione ................................................................... 324
10.5.1
Compensazione di un amplificatore per fotodiodo ........................................................... 311
11 Campionamento e S&H .......................................................................................... 325
11.1
11.2
Teorema del Campionamento ...................................................................................... 325
Accorgimenti nel Campionamento............................................................................... 329
11.2.1
11.2.2
11.3
11.4
Sample & Hold ............................................................................................................ 334
Non idealità dei S&H ................................................................................................... 336
11.4.1
11.4.2
11.4.3
11.4.4
11.4.5
11.4.6
11.4.7
11.5
11.6
Charge-injection induced error .......................................................................................... 337
Signal feed-through ........................................................................................................... 338
Droop ................................................................................................................................. 338
Buffer-induced non-linearity ............................................................................................. 338
Aperture delay time ........................................................................................................... 339
Aperture time jitter ............................................................................................................ 340
Acquisition time................................................................................................................. 341
Esempi di Simulazione................................................................................................. 342
Strutture Migliorate...................................................................................................... 344
11.6.1
11.6.2
11.7
11.8
11.9
Aliasing .............................................................................................................................. 331
Filtraggio antialiasing ........................................................................................................ 333
Compensazione dell’iniezione di carica ............................................................................ 344
Strutture Retroazionate ...................................................................................................... 345
Multiplexer Analogici .................................................................................................. 347
Filtri Attivi Universali.................................................................................................. 354
Esercizi ........................................................................................................................ 359
12 Convertitori DAC .................................................................................................... 379
12.1
12.2
12.3
Generalità ..................................................................................................................... 379
Fattori di qualità ........................................................................................................... 380
Architetture .................................................................................................................. 382
12.3.1
12.3.2
12.3.3
12.4
Errori Statici e non Linearità ........................................................................................ 384
12.4.1
12.4.2
12.4.3
12.4.4
12.4.5
12.5
Errori di Offset e di Gain ................................................................................................... 384
Non linearità Integrale INL e Differenziale DNL ............................................................. 385
Monotonicità ...................................................................................................................... 356
Drift termici ....................................................................................................................... 387
Impedenza di uscita ........................................................................................................... 387
Rapporto Segnale/Rumore ........................................................................................... 388
12.5.1
12.5.2
12.5.3
12.5.4
12.6
DAC a R pesate ................................................................................................................. 382
DAC voltage scaling .......................................................................................................... 383
DAC seriale........................................................................................................................ 384
Errore di quantizzazione .................................................................................................... 388
Rapporto Segnale/Rumore teorico, SNR........................................................................... 389
Rapporto Segnale/Rumore&Distorsione, SiNAD ............................................................. 389
Distorsione armonica ......................................................................................................... 391
Parametri Dinamici ...................................................................................................... 391
12.6.1
Tempo di assestamento ...................................................................................................... 391
F. Zappa
Elettronica
12.7
12.8
Esempio ....................................................................................................................... 393
Esercizi ........................................................................................................................ 396
12.6.2
Glitch ................................................................................................................................. 391
13 Convertitori ADC..................................................................................................... 397
13.1
13.2
Generalità..................................................................................................................... 397
Caratteristiche Statiche ................................................................................................ 397
13.2.1
13.2.2
13.2.3
13.2.4
13.3
13.4
Classificazione degli ADC ........................................................................................... 402
Architetture .................................................................................................................. 403
13.4.1
13.4.2
13.4.3
13.4.4
13.4.5
13.5
13.6
ADC Flash ......................................................................................................................... 403
ADC Tracking a gradinata ................................................................................................ 404
ADC Single-slope, a singola rampa .................................................................................. 405
ADC a doppia rampa ......................................................................................................... 406
ADC ad approssimazioni successive (SAR) ..................................................................... 408
Temporizzazioni .......................................................................................................... 409
Caratteristiche Dinamiche ............................................................................................ 411
13.6.1
13.6.2
13.6.3
13.6.4
13.6.5
13.6.6
13.7
13.8
13.9
Errore di quantizzazione.................................................................................................... 398
Quantizzazione non lineare ............................................................................................... 399
Errori di Offset e Gain ....................................................................................................... 399
Errori di non linearità ........................................................................................................ 401
Dinamica ............................................................................................................................ 412
Signal to Noise Ratio ......................................................................................................... 412
Bit efficaci ed ENOB ........................................................................................................ 413
Prestazioni spettrali ........................................................................................................... 414
SFDR e SiNAD ................................................................................................................. 415
THD e IMD ....................................................................................................................... 416
Requisiti di Pilotaggio degli ADC ............................................................................... 416
ADC Commerciali ....................................................................................................... 419
Esempi Applicativi ...................................................................................................... 422
13.9.1
13.9.2
13.9.3
13.9.4
Scelta A.............................................................................................................................. 422
Scelta B .............................................................................................................................. 423
Scelta C .............................................................................................................................. 423
Scelta D.............................................................................................................................. 424
13.10 Esercizi ........................................................................................................................ 424
14 Logica CMOS ........................................................................................................... 435
14.1
14.2
14.3
14.4
14.5
Classificazione in base alla Tecnologia ....................................................................... 435
Caratteristiche Statiche delle Porte .............................................................................. 437
Caratteristiche Dinamiche delle Porte .......................................................................... 439
Logiche CMOS ............................................................................................................ 441
Inverter CMOS ............................................................................................................ 442
14.5.1
14.5.2
14.6
Dissipazione di Potenza ............................................................................................... 446
14.6.1
14.6.2
14.6.3
14.7
Caratteristica di Trasferimento .......................................................................................... 443
Noise Margin ..................................................................................................................... 444
Potenza Dinamica .............................................................................................................. 446
Cross-conduzione .............................................................................................................. 446
Dissipazione totale di un sistema ...................................................................................... 447
Prestazioni Dinamiche ................................................................................................. 449
14.7.1
14.7.2
14.7.3
Tempi di propagazione ...................................................................................................... 449
Fan-in e Fan-out ................................................................................................................ 449
Prodotto ritardo-consumo .................................................................................................. 451
14.8
Confronto fra Famiglie CMOS e TTL ......................................................................... 451
14.9
High-Speed CMOS (HC) ............................................................................................. 453
14.8.1
14.9.1
14.9.2
14.9.3
14.9.4
Interfacciamento tra Famiglie CMOS e TTL .................................................................... 451
Caratteristiche di ingresso ................................................................................................. 454
Caratteristiche di uscita ..................................................................................................... 455
Calcolo del carico capacitivo ............................................................................................ 456
Consumo di potenza .......................................................................................................... 457
14.10 Esercizi ........................................................................................................................ 458
Indice
15
Reti digitali ............................................................................................................... 471
15.1
15.2
Sistemi di Numerazione Digitali .................................................................................. 471
Classificazioni .............................................................................................................. 472
15.2.1
15.2.2
15.2.3
15.3
Porte Logiche ............................................................................................................... 473
15.3.1
15.3.2
15.3.3
15.3.4
15.4
SoP ..................................................................................................................................... 478
PoS ..................................................................................................................................... 478
Minimizzazione mediante Mappe di Karnaugh ................................................................ 480
Realizzazione mediante Multiplexer e Decoder................................................................ 482
Reti Sequenziali .......................................................................................................... 483
15.5.1
15.5.2
Macchine di Mealy e di Moore ......................................................................................... 483
Macchine sincrone ed asincrone ........................................................................................ 484
15.6
Latch e Registri ............................................................................................................ 486
15.7
Esercizi ........................................................................................................................ 492
15.6.1
16
Gate Logici ........................................................................................................................ 473
Teorema di De Morgan...................................................................................................... 475
Implementazione circuitale in CMOS ............................................................................... 475
Porte di tipo tri-state .......................................................................................................... 477
Reti Combinatorie ........................................................................................................ 478
15.4.1
15.4.2
15.4.3
15.4.4
15.5
Famiglie Logiche Digitali .................................................................................................. 472
Scala di integrazione .......................................................................................................... 472
Sistemi Combinatori, Sequenziali e di Memoria .............................................................. 472
Latch .................................................................................................................................. 486
Componenti digitali................................................................................................. 509
16.1
Logiche ASIC .............................................................................................................. 509
16.1.1
16.1.2
16.1.3
16.2
16.3
LOGICHE FULL CUSTOM ............................................................................................. 509
LOGICHE SEMI CUSTOM ............................................................................................. 510
LOGICHE PROGRAMMABILI....................................................................................... 510
Nomenclatura dei Circuiti Integrati.............................................................................. 513
Componenti Combinatori ............................................................................................. 514
16.3.1
16.3.2
16.3.3
16.3.4
CODIFICATORI ............................................................................................................... 514
Data-Sheet: 4532B, 8-input priority-encoder .................................................................... 514
DECODIFICATORI .......................................................................................................... 518
Data-Sheet: 4543B, BCD-to-7-segment decoder/driver ................................................... 519
16.4
Comparatori ................................................................................................................. 521
16.5
Generatori e Rivelatori di Parità .................................................................................. 523
16.6
Sommatori.................................................................................................................... 524
16.7
ALU ............................................................................................................................. 525
16.8
Multiplexers e Demultiplexers ..................................................................................... 528
16.4.1
16.5.1
16.6.1
16.7.1
16.8.1
16.8.2
16.8.3
16.8.4
16.9
Data-Sheet: 4585B, 4-bit magnitude comparator .............................................................. 522
Data-Sheet: 4531B, 13-input parity checher/generator ..................................................... 524
Data-Sheet: 4008B, 4-bit binary full-adder ....................................................................... 525
Data-Sheet: MM54HC181, ALU ...................................................................................... 526
MULTIPLEXERS ............................................................................................................. 528
Data-Sheet: 4512B, 8-input MUX with tri-state output .................................................... 531
DEMULTIPLEXERS ........................................................................................................ 531
Data-Sheet: 4514B, 1-of-16 decoder/demux with latches ................................................ 533
Implementare Funzioni con Mux e Decoder ................................................................ 534
16.9.1
16.9.2
MEDIANTE MULTIPLEXER ......................................................................................... 534
MEDIANTE DECODIFICATORE................................................................................... 536
16.10 Componenti Sequenziali .............................................................................................. 536
16.10.1
16.10.2
16.10.3
16.10.4
16.10.5
16.10.6
Latch e Flip-Flop ............................................................................................................... 537
Data-Sheet: HEF4013B ..................................................................................................... 539
Shift Registers .................................................................................................................... 540
Data-Sheet: HEF40195B ................................................................................................... 547
CONTATORI .................................................................................................................... 547
Data-Sheet: HEF40192 ...................................................................................................... 551
16.11 Esercizi ........................................................................................................................ 552
F. Zappa
Elettronica
Fig. 5.14: Modellizzazione di un condensatore avente tensione iniziale non nulla (sinistra)
e di un induttore avente corrente iniziale non nulla.
5.4.1
CONDIZIONI INIZIALI NON NULLE
La trasformata di Laplace può essere usata per analizzare i circuiti elettronici se le
variabili elettriche della rete sono nulle per t<0 ovvero se tutti gli elementi reattivi
(condensatori e induttori) sono inizialmente scarichi. Per analizzare reti con elementi
reattivi inizialmente carichi, si può ricorrere ad uno stratagemma: si considerano scarichi
per t<0 e successivamente caricati istantaneamente nell’istante t=0 con dei generatori
forzanti degli impulsi a delta di Dirac, come mostrato in Fig. 5.14.
Condensatori: per modellizzare la carica iniziale, si mette in parallelo al condensatore
un generatore di corrente che inietta una delta di Dirac di area Q=C·V0, dove V0 è la
tensione a cui è inizialmente carico il condensatore.
Induttori: per modellizzare un induttore inizialmente carico a I0, si mette in serie
all’induttore un generatore di corrente che inietta una delta di Dirac di area L·I0, dove
I0 è la corrente a cui si vuole sia inizialmente carico l’induttore.
Una volta introdotti i generatori a delta di Dirac, la rete viene risolta utilizzando il
principio di sovrapposizione degli effetti, in modo da includere l’effetto dei generatori
deltiformi aggiunti e, in definitiva, considerare la condizione iniziale degli elementi reattivi.
5.5
DIAGRAMMI DI BODE
Per analizzare l’andamento in frequenza dei circuiti elettronici, si devono quindi
rappresentare i diagrammi di Bode del modulo e della fase. Una volta ricavata la funzione
di trasferimento H(s) del circuito è utile trovare un metodo per rappresentare i diagrammi di
Bode in modo immediato e più diretto, attraverso delle considerazioni semplici e non
utilizzando strumenti di calcolo numerico che risolvano H(s). Servono quindi delle regole
per disegnare “carta e penna” i diagrammi di Bode partendo da H(s).
Il primo passo è quello di riscrivere la funzione di trasferimento in modo che i poli e gli
zeri siano nella forma (1+s/Z0). La ragione sarà chiara in seguito, quando si analizzeranno
le regole per tracciare i diagrammi. Supponiamo di riscrivere la seguente funzione di
trasferimento (tutte le considerazioni possono essere generalizzate ad una qualunque
funzione di trasferimento):
s 1
.
( s 10)( s 100)
1 s /1
.
H ( s ) 0.1
(1 s /10)(1 s /100)
H ( s ) 100
Si ha quindi
148
Analisi di frequenza
Vediamo ora come disegnare facilmente il modulo e la fase di questa funzione per s=jZ.
Notiamo che questa espressione è composta da quattro termini: una costante (0.1), uno zero
(in s=-1) e due poli (in s=-10 e s=-100). Possiamo riscrivere la funzione (con s=jZ) come
quattro fasori:
1 jZ /1
H ( jZ ) 0.1
(1 jZ /10)(1 jZ /100)
ª¬ 1 jZ /1 (1 jZ /1) ¼º
ª¬ 1 jZ /10 (1 jZ /10) ¼º ¬ª 1 jZ /100 (1 jZ /100) ¼º
da cui si ricava che il modulo di H(jZ) vale:
[ 0.1 (0.1)]
H ( jZ )
0.1
1 jZ /1
1 jZ /10 1 jZ /100
mentre la fase è:
( H ( jZ )) (0.1) (1 jZ /1) (1 jZ /10) (1 jZ /100)
Si noti che |H(jZ)| è il rapporto tra le lunghezze dei vettori del piano complesso che
uniscono le singolarità con il punto dell’asse immaginario corrispondente alla frequenza
Ȧ0in cui si valuta il modulo, mentre la fase è composta dagli angoli rispettivamente formati
da ciascun vettore con l’asse positivo delle ascisse. Si veda al riguardo la Fig. 5.15. Si
osservi inoltre come il modulo si ricavi dal prodotto dei moduli dei quattro componenti.
Passando ad una rappresentazione bi-logaritmica, ovvero usando i dB, si ottiene:
§
·
1 jZ /1
H ( jZ ) dB 20 log H ( jZ ) 20 log ¨ 0.1
¸
¨
1 jZ /10 1 jZ /100 ¸¹
©
20 log 0.1 20 log 1 jZ /1 20 log 1 jZ /10 20 log 1 jZ /100
Ragionando in dB (in pratica con l’operazione logaritmica) si trasformano le
moltiplicazioni in somme e si semplifica molto il processo di costruzione del diagramma di
Bode del modulo: è sufficiente sommare i singoli contributi. Inoltre tutti i termini sono o
costanti o termini nella forma 20·log(|1+jZ/Z0|). Nel caso di termini del tipo (|1+jZ/Z0|)n,
per i decibel si avrebbero termini del tipo n·20·log(|1+jZ/Z0|), mentre per le fasi i termini
sarebbero del tipo n (1 jZ / Z0 ) . Quindi si giunge a disegnare i singoli termini
20·log(|1+jZ/Z0|) per il modulo e (1 jZ / Z0 ) per le fasi, per poi sommarli tra loro.
Im(s)=jZ
Z
Re(s)=D
Fig. 5.15: Metodo grafico per calcolare modulo e fase di una funzione di trasferimento.
149
F. Zappa
5.5.1
Elettronica
COSTANTE
Un termine costante H(jZ)=K dà un contributo pari a |H(jZ)|=K per il modulo (linea
costante nel grafico). Per la fase il contributo vale H ( jZ ) 0 (linea costante a 0 nel
grafico) se K>0, H ( jZ ) S (linea costante a -ʌ nel grafico) se K<0. Per la ciclicità
delle fasi, si ricorda che in generale a tutte le fasi si può sommare 2ʌ.
5.5.2
POLO REALE
Consideriamo un polo reale:
H ( jZ )
1
1 s / Z0
Modulo: Il modulo in dB vale:
H ( s)
1 jZ / Z0
1
Eq. 5.20
§Z ·
Eq. 5.21
H ( jZ ) dB 20 log
20 log 1 ¨ ¸
1 jZ / Z0
© Z0 ¹
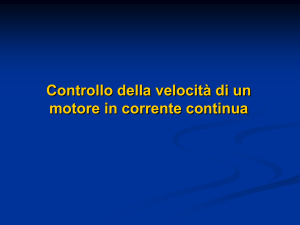
Distinguiamo tre regioni distinte, come chiaramente visibile in Fig. 5.16:
1. Z<<Z0 (bassa frequenza): |H(jZ)|dB tende a 0dB, quindi una retta orizzontale a 0dB.
2
1
2. Z>>Z0 (alta frequenza): si ha
H ( jZ ) dB
2
§Z ·
§Z ·
20 log 1 ¨ ¸ o 20 log ¨ ¸
© Z0 ¹
© Z0 ¹
2
2
.
Può quindi essere approssimato da una retta con pendenza di -20 dB/decade che parte da
0dB in corrispondenza della frequenza Ȧ0: per ogni incremento di un fattore 10 della
frequenza, l’ampiezza diminuisce di 20dB.
3. Z=Z0: a questa frequenza H ( jZ )
20 log 2 | 3dB .
dB
Usando le approssimazioni per bassa ed alta frequenza si può disegnare il diagramma di
Bode asintotico: il diagramma di Bode reale si discosta da quello asintotico maggiormente
proprio in Z=Z0, essendo la differenza pari a 3dB. La regola per disegnare un diagramma
asintotico nel caso di un polo reale può essere così scritta: per un polo reale
l’approssimazione asintotica del diagramma del modulo di Bode è 0dB fino alla frequenza
Z=Z0 e quindi diminuisce con pendenza di -20dB/decade.
Fase: La fase di un polo reale è data da:
( H ( jZ ))
§
Z·
¨1 j ¸
Z0 ¹
©
§Z ·
arctan ¨ ¸
© Z0 ¹
Eq. 5.22
Consideriamo anche in questo caso tre zone sull’asse delle frequenze, visibili in Fig. 5.17:
1. Z<<Z0 (bassa frequenza): in questo caso H ( jZ ) tende a 0 e quindi può essere
approssimata da una retta a 0°.
2. Z>>Z0 (alta frequenza): si approssima H ( jZ ) | arctan f S rad e quindi può
2
essere considerato uno sfasamento costante di –ʌ/2rad ossia -90°.
3. Z=Z0: a questa frequenza H ( jZ ) arctan(1) S rad ossia -45°.
4
Per tracciare un diagramma asintotico, si ricorre alla seguente approssimazione: seguire
l’asintoto a bassa frequenza fino alla frequenza corrispondente a un decimo di Z0 (0.1Z0),
quindi scendere linearmente fino ad incontrare l’asintoto ad alta frequenza alla frequenza
pari a dieci volte Z0 (10·Z0). Il contributo complessivo di un polo è quindi –90°.
150
Analisi di frequenza
|H(jZ)|dB
Asintoto
ad alta frequenza
Z
·Z Z
Z
Approssimazione
asintotica
3dB
Asintoto
a bassa frequenza
Funzione
esatta
-2
0d
B/
de
ca
de
Fig. 5.16: Effetto di un polo sul diagramma di Bode del modulo.
H(jZ)
0
Z0/10
Asintoto
a bassa frequenza
Z0
Z
10·Z0
Funzione
esatta
-S/4
Approssimazione
a spezzata
Asintoto
ad alta frequenza
-S/2
Fig. 5.17: Effetto di un polo sul diagramma di Bode della fase.
L’approssimazione proposta non introduce errori in Z=Z0, mentre l’errore in 0.1·Z0
(una decade prima Z0) e 10·Z0 (una decade dopo Z0) vale circa 5.7°.
Si noti che nei circuiti elettronici non è possibile anche avere poli con parte reale
positiva, che farebbe modificare l’andamento del diagramma delle fasi.
5.5.3
ZERO REALE
Consideriamo uno zero reale:
H ( s ) 1 s / Z0
H ( jZ ) 1 jZ / Z0
Eq. 5.23
Gli andamenti sono molto simili a quelli di un polo reale.
Modulo: Il modulo in dB vale:
H ( jZ ) dB
20 log 1 jZ / Z0
§Z ·
20 log 1 ¨ ¸
© Z0 ¹
2
2
Eq. 5.24
Consideriamo tre casi:
1. Z<<Z0 (bassa frequenza): in questo caso |H(jZ)|dB tende a 0dB e quindi può essere
approssimato da una retta a 0dB.
2. Z>>Z0 (alta frequenza): in questo caso si approssima
151
F. Zappa
Elettronica
|H(jZ)|dB
Funzione
esatta
Asintoto
a bassa frequenza
3dB
Z
Z
0
+2
e
ad
ec
d
/
dB
Approssimazione
asintotica
·Z
Z
Asintoto
ad alta frequenza
Fig. 5.18: Effetto di uno zero sul diagramma di Bode del modulo.
S/2
S/4
H(jZ)
Asintoto
ad alta frequenza
Approssimazione
a spezzata
Z0
Z0/10
Funzione
esatta
10·Z0
Z
Asintoto
a bassa frequenza
Fig. 5.19: Effetto di uno zero sul diagramma di Bode della fase.
§Z·
§Z ·
H ( jZ ) dB 20 log 1 ¨ ¸ o 20 log ¨ ¸
© Z0 ¹
© Z0 ¹
e quindi il modulo può essere approssimato da una retta con pendenza di +20dB/dec che
parte da 0dB in corrispondenza della frequenza Ȧ0: per ogni incremento di un fattore 10
della frequenza, l’ampiezza aumenta di 20dB.
3. Z=Z0: a questa frequenza H ( jZ )
20 log 2 | 3dB .
2
2
dB
Usando le approssimazioni per bassa e alta frequenza si può disegnare il diagramma di
Bode asintotico: il diagramma di Bode reale si discosta maggiormente da quello asintotico
proprio in Z=Z0, essendo la differenza pari a 3dB.
La regola per disegnare un diagramma asintotico per uno zero reale può essere così
scritta: per uno zero reale l’approssimazione asintotica del diagramma del modulo di Bode
è 0dB fino alla frequenza Z=Z0 e quindi aumenta con pendenza di +20dB/decade.
Fase: La fase di uno zero reale è data da:
§
§Z ·
Z·
( H ( jZ )) ¨ 1 j ¸ arctan ¨ ¸
Eq. 5.25
Z0 ¹
©
© Z0 ¹
152
Analisi di frequenza
Consideriamo tre casi:
1. Z<<Z0 (bassa frequenza): in questo caso H ( jZ ) tende a 0 e quindi può essere
approssimata da una retta a 0 rad.
2. Z>>Z0 (alta frequenza): in questo caso si ha H ( jZ ) | arctan f S rad e quindi
2
può essere approssimata da uno sfasamento costante di ʌ/2rad ossia +90°.
3. Z=Z0: a questa frequenza H ( jZ ) arctan(1) S rad ossia +45°.
4
Per tracciare un diagramma asintotico, si ricorre alla seguente approssimazione: seguire
l’asintoto a bassa frequenza fino alla frequenza corrispondente a un decimo di Z0 (0.1·Z0),
quindi salire linearmente fino ad incontrare l’asintoto ad alta frequenza alla frequenza pari a
dieci volte Z0 (10·Z0). Il contributo complessivo di uno zero è quindi ʌ/2 rad.
L’approssimazione proposta non introduce errori in Z=Z0, mentre l’errore in 0.1·Z0
(una decade prima Z0) e 10·Z0 (una decade dopo Z0) vale circa 5.7°.
Si noti che è possibile anche avere zeri con parte reale positiva. In questo caso il
contributo al diagramma di Bode del modulo non cambia (incremento di +20dB/decade)
mentre il contributo nel diagramma di Bode della fase ha segno opposto ovvero –ʌ/2 (e
quindi per le fasi si comporta come se fosse un polo a parte reale negativa). Si vedano
anche gli esempi più avanti.
5.5.4
POLO NELL’ORIGINE
Consideriamo un polo nell’origine:
H ( jZ )
1
s
H (s)
1
jZ
Eq. 5.26
Modulo: E’ dato dalla seguente espressione:
H ( jZ )
Eq. 5.27
Z
Ossia una linea retta con pendenza di -20dB/dec che passa per 0dB in Ȧ=1rad/s.
Fase: E’ data da:
§ 1 ·
1·
S
§
( H ( jZ )) ¨
Eq. 5.28
¸ ¨ j ¸ 2
© Z¹
© jZ ¹
Quindi un polo nell’origine introduce uno sfasamento di –ʌ/2rad=-90° costante,
partendo dall’origine delle frequenze, ossia dalla continua.
5.5.5
1
ZERO NELL’ORIGINE
Consideriamo uno zero nell’origine:
H (s)
s
H ( jZ )
Modulo: E’ dato dalla seguente espressione:
H ( jZ )
Z
jZ
Eq. 5.29
Eq. 5.30
E’ una linea retta con pendenza di 20dB/decade che passa per 0dB in Ȧ=1 rad/s.
Fase: E’ data da:
( H ( jZ )) jZ S
2
Eq. 5.31
Quindi uno zero nell’origine introduce uno sfasamento di +ʌ/2rad=+90° costante,
partendo dall’origine delle frequenze, ossia dalla continua.
153
F. Zappa
5.5.6
Elettronica
POLI COMPLESSI CONIUGATI
Z02
s 2 2[Z0 s Z02
Consideriamo la seguente funzione di trasferimento con 0<ȟ<1.:
H ( s)
§
¨
20 log ¨
¨
©
Modulo: Dall’Eq. 5.32 si ricava:
H jZ dB
1
§ s ·
§ s ·
¨ ¸ 2[ ¨ ¸ 1
© Z0 ¹
© Z0 ¹
2
Eq. 5.32
2 ·
§ § Z ·2 · §
Z· ¸
¨1 ¨ ¸ ¸ ¨ 2[
¨ © Z0 ¹ ¸ © Z0 ¸¹ ¸¸
©
¹
¹
2
Eq. 5.33
Consideriamo tre casi:
1. Z<<Z0 (bassa frequenza): in questo caso |H(jZ)|dB tende a 0dB e quindi può essere
approssimato da una retta a 0dB.
2. Z>>Z0 (alta frequenza): in questo caso si ha:
§ §
2 2
2 ·
§Z ·
Z· ¸
¨ ¨ § Z · ·¸ §
H ( jZ ) dB 20 log ¨ 1 ¨ ¸ ¨ 2[
o 40 log ¨ ¸
¸
¸
© Z0 ¹
¨ ¨© © Z0 ¹ ¸¹ © Z0 ¹ ¸
©
¹
e quindi il modulo può essere approssimato da una retta con pendenza di -40dB/dec che
tende a 0dB in corrispondenza della frequenza Ȧ0: per ogni incremento di un fattore 10
della frequenza, l’ampiezza diminuisce di 40dB.
3. Z Z0: si può dimostrare che si verifica un picco nel modulo vicino alla frequenza Z0.
La posizione esatta (solitamente non importante quando si disegna a mano) e l’ampiezza
possono essere calcolate analiticamente ponendo la derivata della funzione di
trasferimento uguale a zero. Risulta che il picco si trova in Zr Z0 1 2[ 2 (detta
pulsazione di risonanza) e che l’ampiezza del picco vale H ( jZr )
20 log 2[ 1 [ 2 .
Il picco esiste solo per 0 [ 1/ 2 0.707 (solo per le ȟ per cui Ȧr è reale). Inoltre,
l’ampiezza per Z Z0 vale H ( jZ0 ) 20 log 2[ . Attenzione a distinguere Ȧr da Ȧ0.
Si osserva che [
Re(Z0 )
cos ) ed è definito come fattore di forma della coppia di poli
Z0
complessi coniugati ed è pari al coseno dell’angolo che sottende il polo all’origine. Quindi
se ȟ = 1, i poli diventano reali e coincidenti e H ( jZ0 ) 20 log 2[ | 6dB .
Possiamo allora affermare quanto segue: se 0 [ 1/ 2 0.707 , la funzione |H(jZ)|dB
presenta un andamento reale diverso (anche notevolmente, se ȟè molto piccolo) da quello
asintotico, quindi quest’ultimo va corretto, utilizzando il picco e la pulsazione di risonanza.
Se invece risulta [ ! 1/ 2 , allora la funzione |H(jZ)|dB non presenta un massimo e il
diagramma asintotico è accettabile (in quanto |H(jZ)|dB presenta un andamento monotono
decrescente), con un errore compreso tra 3 e 6 dB.
Spesso, nel trattare i filtri, per indicare quanto stretto è il picco si introduce la quantità
Q=1/(2ȟ) detta fattore di qualità: più Q è alta, più il picco è stretto e più il filtro è selettivo.
154
Analisi di frequenza
|H(jZ)|dB
Asintoto
ad alta frequenza
Picco di
risonanza
Z
Z
·Z Z
Funzione
esatta
-4
Asintoto
0
a bassa frequenza Approssimazione dB/d
ec
ad
asintotica
e
Fig. 5.20: Effetto di una coppia di poli, complessi e coniugati sul diagramma di Bode del
modulo.
H(jZ)
Z0/10
0
Z0
Asintoto
a bassa frequenza
10·Z0
Z
Funzione
esatta
-S/2
Approssimazione
a spezzata
Asintoto
ad alta frequenza
-S
Fig. 5.21: Effetto di una coppia di poli, complessi e coniugati sul diagramma di Bode della
fase.
La regola per disegnare un diagramma asintotico per una coppia di poli complessi
coniugati può essere così riassunta: per una coppia di poli complessi coniugati
l’approssimazione asintotica del diagramma del modulo di Bode è 0 dB fino alla frequenza
Z=Z0 e quindi diminuisce con pendenza di -40dB/dec. In Zr
ampiezza H ( jZr )
20 log 2[ 1 [ 2 se 0 [ 1/ 2
Z0 1 2[ 2 c’è un picco di
0.707 .
§
·
¨ 2[ Z ¸
Z0 ¸
¨
arctan ¨
2 ¸
§
·
Z
¨ 1
¸
¨ ¨Z ¸ ¸
© © 0¹ ¹
Fase: La fase di una coppia di poli complessi coniugati è data da:
H ( jZ ) Consideriamo tre casi:
155
Eq. 5.34
F. Zappa
Elettronica
1. Z<<Z0 (bassa frequenza): in questo caso ( H ( jZ )) | arctan(0) 0rad e quindi può
essere approssimato con uno sfasamento costante di 0rad=0°.
2. Z>>Z0 (alta frequenza): in questo caso ( H ( jZ )) | S rad e quindi può essere
approssimato con uno sfasamento costante di –ʌrad ossia -180°.
3. Z Z0: a questa frequenza H ( jZ0 ) S rad ossia -90°
2
Per disegnare il diagramma asintotico, è importante considerare ȟ: più ȟ è piccolo, più la
transizione da 0 rad a –ʌrad è verticale. Una regola di massima per tracciare i diagrammi
della fase di una coppia di poli complessi coniugati è quella di tracciare una retta che unisca
i due punti alle frequenze Ȧ0/2·log(2/ȟ) e 2Ȧ0/log(2/ȟ).
5.5.7
ZERI COMPLESSI CONIUGATI
Per tracciare l’andamento degli zeri complessi coniugati si devono fare delle
considerazioni molto simili a quelle fatte per i poli complessi coniugati. Le uniche
differenze sono nei segni:
per il modulo, l’asintoto ad alta frequenza sale con +40dB/dec e il picco in Ȧr è
negativo;
per la fase, ad alta frequenza l’asintoto è a +ʌrad=+180°.
5.6
CONSIDERAZIONI PRATICHE
Sia dato il diagramma di Bode del modulo mostrato in Fig. 5.22. Per tracciarne
correttamente le linee e per calcolare le ampiezze e le frequenze dei punti di intersezione,
spesso sono utili alcune considerazioni sui legami tra ampiezze e frequenze imposti dalle
curve con pendenze multiple di 20dB/dec.
In generale, lungo le curve con pendenza “–nÂ20dB/dec”, con n intero positivo o
negativo si ha che:
­20 log( A1 ) n 20dB 20 log( A2 )
®
f 2 10 f1
¯
A
dB
A1
- 20 dB/dec
+ 20 dB/dec
A2
- 40 dB/dec
+ 40 dB/dec
f1
f2
f
Fig. 5.22: Esempio di diagramma di Bode del modulo di una funzione di trasferimento.
156
Analisi di frequenza
|...|
-20
dB
/de
ca
de
f
d
d
de
ca
de
B/
0d
-4
Fig. 5.23: Tracciamento di una curva a -40dB/dec, partendo da una di pendenza 20dB/dec, mediante semplici considerazioni geometriche.
da cui
f1 A1 n
1
f 2 A2 n
1
anche per n < 0.
Eq. 5.35
Vediamo alcuni casi particolari, utili per calcolare un’incognita conoscendo le altre tre
grandezze (ad esempio per calcolare l’ampiezza A2 note A1, f1 e f2).
x Pendenza -20dB/dec:
f1ÂA1=f2ÂA2
ovvero il prodotto GuadagnoÂBanda è costante.
Si noti che 20dB/dec vuol dire pendenza della curva a 45° (in un grafico bilogaritmico), ossia aumentando la frequenza di un fattore x, l’ampiezza diminuisce di un
identico fattore x. Inoltre in ambito musicale, la pendenza di 20dB/dec è descritta anche
come 6dB/ottava, dove un ottava corrisponde al raddoppio della frequenza.
f1
f2
x Pendenza +20dB/dec:
A1
A2
Se la frequenza aumenta di un fattore x anche l’ampiezza cresce di un fattore x.
x Pendenza -40dB/dec:
A1 f 1
A2 f 2
Se la frequenza aumenta di un fattore x allora l’ampiezza diminuisce di un fattore (x)2.
x Pendenza +40dB/dec:
f1
f2
A1
A2
Se la frequenza aumenta di un fattore x, l’ampiezza aumenta di un fattore (x)2.
Sempre nel tracciare le curve a -40dB/dec (o +40dB/dec), è utile notare che su un
grafico bi-logaritmico, quale i diagrammi di Bode, la retta con pendenza -40dB/dec (o
+40dB/dec) ha pendenza esattamente doppia di una retta con pendenza -20dB/dec (o
+20dB/dec). Questo può essere utile per tracciare la curva a -40dB/dec (ovvero +40dB/dec)
dopo un polo (o uno zero) intervenuto su una curva a -20dB/dec (o +20dB/dec). Si veda per
esempio la Fig. 5.23.
157
F. Zappa
Elettronica
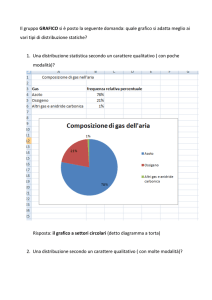
Fig. 5.24: Diagrammi di Bode del modulo e della fase in cui gli zeri possono essere
ricavati facilmente sfruttando le pendenze delle curve.
Es.5.1:
Ricavare graficamente la frequenza di poli e zeri
Dato il diagramma di Bode riportato in Fig. 5.24, in cui si
conoscono i guadagni a bassa, media ed alta frequenza ed i poli, si
ricavino graficamente gli zeri.
Per trovare la posizione degli zeri mancanti (in corrispondenza dei
“?” nella figura), sono utili le relazioni tra frequenze e ampiezze
lungo le curve a pendenza costante. Dal primo zero al polo in 0.4Hz
c’è una curva a +20dB/decade che quindi impone f1/A1=f2/A2, cioè
fZ/38.3 = 0.4/76.7, da cui lo zero in fZ=0.2Hz. Dal polo a 100kHz al
secondo zero c’è una curva a -20dB/decade e quindi f1A1=f2A2, da cui
100kHzǜ76.7=0.755ǜfZ e quindi fZ=10.6MHz.
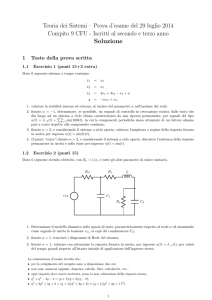
Req
C
Rete vista
ai terminali
di C
Fig. 5.25: Modellizzazione per calcolare il polo introdotto da un condensatore, tramite il
calcolo della resistenza equivalente vista da esso.
5.7
POLI E ZERI DI UN CIRCUITO
Spesso nell’analisi dei circuiti elettronici non si ricava analiticamente la funzione di
trasferimento completa H(s), ma si cerca di disegnarne l’andamento (usando i diagrammi di
Bode) attraverso considerazioni pratiche derivate dall’ispezione del circuito. Alcune di
queste considerazioni sono riportate qui di seguito, per i condensatori.
x La costante di tempo associata ad un condensatore è IJC=ReqC, dove Req è la resistenza
equivalente vista ai terminali del condensatore, come mostrato in Fig. 5.25.
158