Teoria dei Sistemi – Prova d’esame del 29 luglio 2014
Compito 9 CFU - Iscritti al secondo e terzo anno
Soluzione
1
Testo della prova scritta
1.1
Esercizio 1 (punti 15+3 extra)
Dato il seguente sistema a tempo continuo:
ẋ1
= x2
ẋ2
= x3
ẋ3
= 4x1 + 4x2 − x3 + u
y
= −αx1 + x2 ,
1. valutare la stabilità interna ed esterna, al variare del parametro α nell’insieme dei reali;
2. fissato α = −1, determinare, se possibile, un segnale di controllo in retroazione statica dallo stato che
dia luogo ad un P
sistema a ciclo chiuso caratterizzato da una riposta permanente, per segnali del tipo
∞
u(t) = δ−1 (t) + k=1 sin(100kt), in cui le componenti periodiche siano attenuate di un fattore almeno
pari a cento rispetto alla componente continua;
3. fissato α = 2, e considerando il sistema a ciclo aperto, valutare l’ampiezza a regime della risposta forzata
in uscita per ingresso u(t) = sin(0.1t);
4. (3 punti “extra”) fissato α = 2, e considerando il sistema a ciclo aperto, discutere l’esistenza della risposta
permanente in uscita e nello stato per ingresso u(t) = sin(t).
1.2
Esercizio 2 (punti 15)
Dato il seguente circuito elettrico, con Ro = 1/α, e tutti gli altri parametri di valore unitario,
RG
vIN
R1
L
C1
Ro
C2
1. Determinare il modello dinamico nello spazio di stato, parametricamente rispetto al reale α ed assumendo
come segnale di uscita la tensione vC2 ai capi del condensatore C2 ;
2. fissato α = 1, tracciare i diagrammi di Bode del sistema;
3. fissato α = 1, valutare con attenzione la risposta forzata in uscita, per ingresso u(t) = δ−1 (t), per valori
del tempo grandi rispetto all’istante iniziale di applicazione dell’ingresso stesso.
La commissione d’esame ricorda che:
• per lo svolgimento del compito sono a disposizione due ore;
• non sono ammessi appunti, dispense, tabelle, libri, calcolatrici, etc...
• ogni risposta deve essere motivata, pena la non valutazione della risposta stessa;
• q 3 + q 2 − 4q − 4 = (q + 1)(q + 2)(q − 2);
• q 3 + 3q 2 + 5q + 3 = (q + 1)(q 2 + 2q + 3) ≃ (q + 1)(q 2 + 2q + 1.72 ).
1
2
Soluzione Esercizio 1
Dato il seguente sistema a tempo continuo:
2.1
ẋ1
=
x2
ẋ2
=
x3
ẋ3
=
4x1 + 4x2 − x3 + u
y
=
−αx1 + x2 ,
Valutare la stabilità interna ed esterna, al variare del parametro α nell’insieme
dei reali.
Il sistema è in forma canonica di controllore, il suo polinomio caratteristico si calcola quindi in modo immediato trovando:
pA (λ) = λ3 + λ2 − 4λ − 4 = (λ + 1)(λ + 2)(λ − 2),
(1)
tenendo conto delle informazioni contenute in calce al testo del compito.
Il sistema ha quindi tre autovalori λ1 = −1, λ2 = −2, λ3 = 2, tutti semplici. L’autovalore λ3 = 2, positivo, implica
che il sistema è internamente instabile. Tale autovalore genera infatti un modo naturale divergente.
Per valurare la stabilità esterna si deve procedere al calcolo della funzione di tasferimento. Utilizzando ancora le
proprietà della forma canonica di controllore si trova:
W (s) =
s−α
(s + 1)(s + 2)(s − 2)
(2)
e quindi si hanno cancellazioni numeratore/denominatore per i valori del parametro α pari a −1, −2 e 2. Nei primi
due casi l’autovalore positivo è anche polo, e quindi il sistema è anche esternamente instabile. Nel terzo caso, α = 2, la
funzione di trasferimento diviene:
1
W (s) =
(3)
(s + 1)(s + 2)
e quindi il sistema ha due soli poli, p1 = −1 e p2 = −2, entrambi negativi, e quindi il sistema è esternamente stabile,
ossia stabile in senso BIBO.
Commento integrativo, non richiesto dal testo d’esame. Quanto valutato sopra implica che, per qualsiasi
segnale limitato applicato in ingresso, la corrispondente risposta forzata in uscita sarà ancora limitata. Si noti tuttavia
che, poiiché il sistema è raggiungbile e internamente instabile, vi sarà almeno una variabile di stato che, a fronte dello
stesso ingresso, avrà un comportamento divergente. L’analisi simulativa, riportata nelle figure 1 e 2 per il caso di ingresso
a gradino, rispettivamente per la risposta forzata in uscita e nello stato, mostra come tutte e tre le varibiali di stato
siano divergenti. Analogamente per le figure 3 e 4, relative al segnale di ingresso u(t) = sin(t).
Risposta indiciale in uscita (testo 29.07.2014 − E. n. 1)
0.5
0.45
0.4
Amplitude
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0
1
2
3
4
5
Time (seconds)
6
7
8
9
10
Figure 1: Risposta indiciale in uscita per il sistema astratto del testo di esame del 29.07.2014.
2
Risposta indiciale nello stato [testo 29.07.2014 − E. n. 1, u=sin(2t)]
7
To: Out(1)
3
2
1
0
To: Out(2)
Amplitude
6
7
x 10
4
2
0
10
To: Out(3)
x 10
7
x 10
5
0
0
1
2
3
4
5
Time (seconds)
6
7
8
9
10
Figure 2: Risposta indiciale nello stato per il sistema astratto del testo di esame del 29.07.2014.
Risposta sinusoidale in uscita [testo 29.07.2014 − E. n. 1, u=sin(2t)]
0.25
0.2
0.15
0.1
Uscita
0.05
0
−0.05
−0.1
−0.15
−0.2
0
2
4
6
8
10
12
14
Tempo (s)
Figure 3: Risposta sinusoidale in uscita per il sistema astratto del testo di esame del 29.07.2014.
8
15
x 10
x1
10
5
0
0
2
4
6
8
10
12
14
12
14
12
14
Tempo (s)
9
3
x 10
x2
2
1
0
0
2
9
6
x 10
4
6
8
10
Tempo (s)
Risposta sinusoidale nello stato (testo 29.07.2014 − E. n. 1)
x3
4
2
0
0
2
4
6
8
10
Tempo (s)
Figure 4: Risposta sinusoidale nello stato per il sistema astratto del testo di esame del 29.07.2014.
Fine del commento integrativo, non richiesto dal testo d’esame.
3
2.2
Fissato α = −1, determinare, se possibile, un segnale di controllo in retroazione
statica dallo stato che dia luogo ad un sistema a ciclo chiusoP
caratterizzato
da una riposta permanente, per segnali del tipo u(t) = δ−1 (t) + ∞
k=1 sin(100kt),
in cui le componenti periodiche siano attenuate di un fattore almeno pari a
cento rispetto alla componente continua.
Il comportamento richiesto corrispondente ad un sistema asintoticamente stabile (per garantire l’esistenza della risposta
permanente) e caratterizzato da un guadagno in continua maggiore di un fattore pari almeno a cento (e quindi 40 dB) al
valore del guadagno per pulsazioni maggiori di 100 rad/s (si noti che la somma indicata nel testo non converge, e quindi
tale segnale va interpretato come segnale con spettro distribuito su tutte le pulsazioni maggiori di 100 rad/s).
Tale comportamento si può ottenere, ad esempio, con una coppia di poli reali in −1. Tenendo conto del numeratore
della funzione di trasferimento (si ricordi che il numeratore è invariante rispetto a retroazioni dallo stato), una possibile
scelta del polinomio caratteristico da assegnare è: pd (λ) = (λ + 1)3 , cui corrisponde la funzione di trasferimento a ciclo
chiuso:
s+1
1
Wcc (s) =
=
,
(4)
(s + 1)3
(s + 1)2
il cui diagramma di Bode (che può essere omesso nella soluzione del compito di esame) è riportato nella figura 5.
Diagramma di Bode per la sintesi del sistema astratto [Testo di esame del 29.07.2014].
0
Magnitude (dB)
−20
−40
−60
−80
−100
−120
−140
0
Phase (deg)
−45
−90
−135
−180
−225
−270
−1
10
0
1
10
2
10
10
Frequency (rad/s)
Figure 5: Diagramma di Bode per la sintesi del sistema astratto [Testo di esame del 29.07.2014].
Poiché il sistema è in forma canonica di controllore, è sempre possibile allocare tutti gli autovalori con una reazione
statica dallo stato del tipo:
u = kx + v,
(5)
con k progettata come:
k=
(a0 − p0 )
(a1 − p1 )
(a2 − p2 )
,
(6)
ove i termini ai e pi , i = 1, 2, 3, indicano i coefficienti del polinomio caratteristico a ciclo aperto e di quello da allocare,
rispettivamente. Nel caso del polinomio pd (λ) = (λ + 1)3 , si ha p0 = 1, p1 = 3, p2 = 3. La matrice di guadagno k, nel
caso in esame, vale quindi:
k = −4 − 1 −4 − 3 1 − 3 = −5 −7 −2 .
(7)
2.3
Fissato α = 2, e considerando il sistema a ciclo aperto, valutare l’ampiezza a
regime della risposta forzata in uscita per ingresso u(t) = sin(0.1t).
L’ampiezza della riposta forzata in uscita, a regime (cioè per tempi grandi), è desumibile dal diagramma di Bode dei
moduli della funzione di trasferimento:
1
W (s) =
.
(8)
(s + 1)(s + 2)
Anche senza tracciare tale diagramma, poiché il sistema non ha zeri e i due poli sono almeno una decade più grandi
della pulsazione del segnale di ingresso, il modulo alla pulsazione dell’ingresso coincide con il guadagno in continua, e
quindi vale 1/2.
Per completezza, il diagramma di Bode, non richiesto, è riportato in figura 6.
Si legga con cura anche la risposta al seguente punto, facoltativo.
2.4
(3 punti “extra”) fissato α = 2, e considerando il sistema a ciclo aperto, discutere l’esistenza della risposta permanente in uscita e nello stato per ingresso
u(t) = sin(t).
La risposta forzata in uscita, a regime, coincide con la risposta permanente in uscita, se quest’ultima esiste. Pur tuttavia,
la risposta forzata in uscita, a regime, può risultare ben definita, cioè limitata, anche in situazioni nelle quali la risposta
4
Diagramma di Bode per il ciclo aperto del sistema astratto [Testo di esame del 29.07.2014].
0
Magnitude (dB)
−20
−40
−60
−80
−100
0
Phase (deg)
−45
−90
−135
−180
−2
10
−1
10
0
10
Frequency (rad/s)
1
10
2
10
Figure 6: Diagramma di Bode del sistema astratto a ciclo aperto [Testo di esame del 29.07.2014].
permanente non lo è. Più precisamente, la differenza tra la risposta forzata in uscita per tempi grandi (a regime) e la
risposta permanente in uscita (se tali funzioni sono diverse), è data dai modi naturali del sottosistema osservabile e non
raggiungbile, cioé dai modi naturali associati ad autovalori che non sono poli e nel contempo sono parte del sottosistema
osservabile.
Nel caso particolare in esame, la risposta permanente nello stato non esiste, mentre quella in uscita sı̀ , perché tutti
gli autovalori del sottosistema osservabile hanno parte reale negativa. Infatti il sistema è strutturalmente raggiungibile,
e le cancellazioni fanno quindi parte del sottosistema non osservabile.
In particolare, l’esistenza della risposta permanente in uscita deriva dal fatto che tutti gli autovalori del sottosistema
osservabile, cioé tutti gli autovalori i cui modi naturali possono essere presenti nella risposta libera in uscita, sono negativi.
Viceversa, l’esistenza di un autovalore positivo implica che il sistema non è internamente stabile, e quindi la riposta
permanente nello stato non esiste.
Volendo determinare l’ampiezza della risposta permanente in uscita (non richiesta dal testo), si può far ricorso al
diagramma di Bode in figura 6.
5
3
Soluzione Esercizio 2 (Circuito RLC280)
Dato il seguente circuito elettrico, con Ro = 1/α, e tutti gli altri parametri di valore unitario,
RG
R1
vIN
L
C1
Ro
3.1
C2
Determinare il modello dinamico nello spazio di stato, parametricamente
rispetto al reale α ed assumendo come segnale di uscita la tensione vC2 ai
capi del condensatore C2 .
Il sistema ha tre componenti con memoria, e quindi per la costruzione del modello dinamico servono tre variabili di stato,
da associare ai due condensatori e all’induttore, ed inoltre un segnale di ingresso per descrivere il generatore di tensione
x1
vC1
x = x2 := vC2 , u := vin .
(9)
x3
iL
Le equazioni di Kirchoff che descrivono la topologia del circuito sono:
u
=
vRG + vC1
vC1
=
vL + vR1 + vC2
iRG
=
iC1 + iL
iL
=
iRo + iC2
da cui, risolvendo rispetto a iC1 , iC2 e vL in funzione delle tre variabili di stato e dell’ingresso, e tenendo conto del valore
dei parametri, si ricava il modello differenziale:
x˙1
=
−x1 − x3 + u
x˙2
=
−αx2 + x3
x˙3
=
x1 − x2 − x3
y
=
x2 ,
e in forma matriciale:
ẋ
=
Ax + bu
y
=
cx
A
3.2
=
1
0
1
0
−α
−1
−1
1 ,
−1
1
b = 0 ,
0
c=
0
1
0
.
Fissato α = 1, tracciare i diagrammi di Bode del sistema.
Il tracciamento dei diagrammi di Bode presuppone il calcolo della funzione di trasferimento. Dalla struttura della matrice
A, e tenendo conto delle indicazioni fornite in calce al testo, per il polinomio caratteristico si trova:
λ+1
0
1
λ+1
−1
det(λI − A) = det 0
−1
1
λ+1
=
λ3 + 3λ2 + 5λ + 3 = (λ + 1)(λ2 + λq + 3) ≃ (λ + 1)(λ2 + 2λ + 1.72 ).
Tenendo conto anche della struttura delle matrici b e c, per la funzione di trasferimento si trova:
W (s) = c(sI − A)−1 b =
a2,1 (s)
c · adj(sI − A) · b
= 3
det(sI − A)
s + 3s2 + 5s + 3
(10)
dove a2,1 (s) indica l’elemento in posizione (2, 1) nella matrice aggiunta di (sI − A). Fissato α = 1, con un poco di algebra
si trova:
1
1
=
.
(11)
W (s) = 3
s + 3s2 + 5s + 3
(s + 1)(s2 + 2 · s + 1.72 )
6
Per il tracciamento dei diagramma di Bode, posta la funzione di trasferimento nella forma in costanti di tempo, o
forma di Bode, si ha:
1/3
.
(12)
W (s) =
2
(s + 1)( s3 + 23 s + 1)
Il tracciamento dei diagrammi quindi può essere condotto sommando i diagrammi di:
• un termine costante wg (s) = 1/3;
• un termine binomio a denominatore wb (s) = (s + 1);
2
• e infine un termine trinomio a denominatore wt (s) = ( s3 + 32 s + 1), con smorzamento pari a ζ = 1/1.7 = 0.59 e
pulsazione naturale pari a ωn = 1.7.
Il diagramma dei moduli quindi si ottiene per somma di un termine di guadagno pari a −20 log 10 (3) = −9.5dB, un
termine polo semplice con punto di rottura in ω = 1, un termine trinomio a denominatore, con risonanza, perché lo
smorzamento vale ζ = 0.59 < 0.707.
In modo analogo per le fasi, sommando i vari contributi.
Il diagramma complessivo è riportato in figura 7.
Poiché il sistema ha grado relativo pari a tre, per alti valori delle pulsazioni il diagramma dei moduli decresce con
una pendenza pari a −60dB per decade e la fase vale −270◦ .
Diagramma di Bode del circuito RLC280
0
Magnitude (dB)
−20
−40
−60
−80
−100
−120
0
Phase (deg)
−45
−90
−135
−180
−225
−270
−2
10
−1
10
0
10
Frequency (rad/s)
1
10
2
10
Figure 7: Diagramma di Bode del circuto RLC 280.
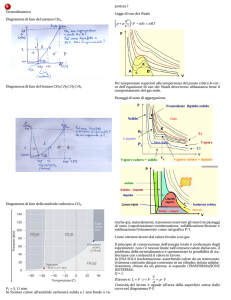
3.3
Fissato α = 1, valutare con attenzione la risposta forzata in uscita, per ingresso u(t) = δ−1 (t), per valori del tempo grandi rispetto all’istante iniziale di
applicazione dell’ingresso stesso.
Innanzitutto, la risposta permanente esiste perché tutti gli autovalori del sistema, e quindi tutti i poli, hanno parte
reale negativa. Esiste quindi, e coincide con la risposta permanente, la risposta forzata in uscita, per ingresso u(t) =
δ−1 (t), per valori del tempo grandi rispetto all’istante iniziale di applicazione dell’ingresso stesso, cioè quanto chiesto dal
quesito.
Tale risposta è un gradino, di ampiezza pari al guadagno in continua: W (0) = 1/3.
7