Ciclo di seminari in STATISTICA e APPLICAZIONI per le Scuole di
Dottorato in Ingegneria Civile, Ingegneria Industriale, Ingegneria
dell’Informazione
Coordinatori: Prof.ri Pasquale Erto e Roberta Siciliano
Novembre 2013– Gennaio 2014
Metodi di Stima e Test Statistici
Antonio D’Ambrosio, Ph.D.
Assistant Professor,
Dept. Of Industrial Engineering, Naples University Federico II
STAD Research Group
http://www.stad.unina.it
Outline
• Statistiche campionarie e distribuzioni campionarie
– Statistica, stimatore, statistica-test
– Proprietà degli stimatori
• Metodi di stima
–
–
–
–
–
Metodo dei Momenti
Metodo dei Minimi Quadrati
Metodo della Massima Verosimiglianza
Stima puntuale per intervalli
Inferenza computazionale (moderna)
• Bootstrap
• Jacknife
• Cross-validation
• Ensemble Methods
• Test delle ipotesi statistiche
– Logica e caratteristiche fondamentali dei test
– Test Parametrici e non parametrici
Sono già noti i concetti di…
• Statistica descrittiva;
• Probabilità;
• Variabili casuali.
Premessa
Un’industria che produce pompe idrauliche utilizza guarnizioni in materiale
plastico che vengono usate nel raccordo degli elementi meccanici. Le
guarnizioni vengono fornite da un’industria chimica con un contratto di
forniture periodiche di 5000 guarnizioni alla volta.
L’industria acquirente ha l’esigenza di valutare la qualità dei pezzi forniti per
ogni fornitura.
Il tempo (e il costo) di collaudo delle guarnizioni rende inverosimile
procedere all’esame di tutti i pezzi forniti, visto che le guarnizioni devono
essere fatte funzionare sotto pressione elevata e per un certo periodo di
tempo.
Si procede, così, all’esame di un numero limitato di guarnizioni, ad esempio
50, e dall’esame di soli questi pezzi si vuol valutare la frazione di pezzi
difettosi dell’intera partita ed eventualmente respingere la fornitura.
Premessa (Cont’d…)
Si può considerare la partita di 5000 guarnizioni come la popolazione
oggetto di indagine in cui ogni pezzo rappresenta un «soggetto» (o unità
statistica) del quale siamo interessati alla sua conformità o meno alle
specifiche tecniche.
Le 50 guarnizioni che vengono effettivamente controllate sono il campione,
attraverso l’analisi del quale si vuole valutare la frazione di elementi
conformi nell’intera popolazione.
Ovviamente le rilevazioni sugli elementi del campione sono di interesse
nella misura in cui esse forniscono informazione sulle caratteristiche della
popolazione.
Per poter estendere le caratteristiche del campione alla popolazione, è
necessario che questo debba riprodurre, per quanto possibile, le
caratteristiche della popolazione, cioè deve essere rappresentativo della
stessa.
Premessa (Cont’d…)
Affinché un campione sia rappresentativo bisogna scegliere gli elementi che
lo compongono in modo tale che l’inclusione sia indipendente dalle
caratteristiche che si vogliono esaminare.
Un modo che assicura l’indipendenza richiesta è quello di scegliere gli
elementi del campione in modo casuale, quindi per definizione in modo
indipendente dalla caratteristica oggetto di studio.
Si può pensare di istituire un esperimento casuale ausiliario per selezionare
i soggetti da includere nel campione, idealizzandolo (ad esempio) nella
estrazione di tante palline da un’urna che contiene tanti elementi quanti
sono gli elementi della popolazione.
L’estrazione può avvenire con ripetizione o senza ripetizione.
La probabilità di estrazione potrebbe non essere uguale per tutti se, ad
esempio, si assegnano probabilità di estrazione diverse a palline diverse,
oppure se si predispongono più urne…
Premessa (Cont’d…)
L’esempio dell’industria può essere comparato ad una situazione in cui in
un’urna ci sono 5000 palline (la popolazione di guarnizioni) di cui una
proporzione incognita è rappresentata da palline nere (i pezzi difettosi).
Supponiamo che l’estrazione delle 50 palline dia luogo al risultato che 4 di
esse siano nere.
La proporzione 4/50 è un criterio ragionevole per dare un valore a , ma ad
esempio, se si fossero estratte 100 palline di cui 8 difettose, la proporzione
sarebbe rimasta immutata. Le domande a cui cerchiamo di dare una risposta
sono:
• Cosa sarebbe cambiato se avessimo scelto di estrarre 100 palline?
• Ci sono altri metodi di scegliere ragionevolmente ?
• Quanto è accurata la valutazione del risultato?
• Che informazione abbiamo su altri plausibili valori di ?
Premessa (Cont’d…)
L’esperimento in questione ci consente di individuare la v.c. che ha generato
il fenomeno nella popolazione
50
=4 =
1−
4
Nel grafico si è lasciata
variare l’incognita nel
range dei possibili valori
che nella realtà può
assumere.
Il massimo valore che la
figura assume si trova in
corrispondenza di
= 4/50.
Se avessimo optato per
un valore alternativo di
pari a 6/50, quale tra
le alternative sarebbe
stata più verosimile?
Premessa (Cont’d…)
Nel grafico si è assunto di avere estratto un campione di numerosità 100. Si è poi diviso il
risultato di ogni valore di ottenuto per il suo massimo, al fine di rendere sovrapponibili le
due figure. Il massimo valore che la figura assume si trova in corrispondenza di = 4/50.
Quale delle due situazioni fornisce maggiore informazione?
Premessa (Cont’d…)
Si può individuare un intervallo di valori sufficientemente plausibili per che tenga conto del
fatto che vi è comunque un grado di imprecisione intrinseco nel risultato dell’estrazione
campionaria?
Campione Casuale
Indichiamo con X la popolazione, la quale è caratterizzata dalla v.c. X. La
conoscenza della popolazione X coincide strettamente con la funzione di
ripartizione
; della v.c. X.
Dalla popolazione X viene estratto un sottoinsieme di n unità statistiche. La
procedura di selezione (assimilabile ad una prova nel senso del calcolo delle
probabilità) genera una n-pla di v.c. ( , , … , )la cui determinazione
numerica specifica una n-pla di numeri reali ( , , … , ) detto campione
osservato. Di conseguenza, ogni è la realizzazione della v.c. che prende
il nome di v.c. della i-ma estrazione. E’ da notare, inoltre, che ogni
proviene dalla stessa v.c. ∼ ( ; ).
Le v.c. sono quindi componenti della v.c. n-pla
indipendenti e identicamente distribuite.
=(
,
,…,
)
Campione Casuale e Campione Osservato
Una successione di v.c. ( , , … , ) ottenute con una procedura di
estrazione da ∼ ( ; ) è detta campione casuale se le v.c. , = 1, … ,
sono indipendenti e identicamente distribuite.
Il campione osservato è la n-pla di numeri reali ( ,
costituiscono le realizzazioni del campione casuale.
,…,
) che
La distribuzione congiunta del campione casuale è, pertanto,
( ; ) = ( ; ) ( ; )… (
; )=
!
( ; )
Statistica, Stimatore, Statistica-test
Si definisce statistica (campionaria) " = "( , , … , ) qualunque funzione nota
e a valori reali del campione casuale indipendente da quantità incognite. Essendo
funzione di variabili casuali, la statistica stessa è una variabile casuale.
Il valore della statistica " calcolata sul campione casuale # = "( , … ,
il nome di statistica calcolata.
), prende
Nell’ambito della teoria della stima, la statistica è chiamata stimatore mentre la
statistica calcolata è detta stima;
Nell’ambito della teoria della prova delle ipotesi, la statistica viene detta statisticatest.
La distribuzione di probabilità della statistica prende il nome di distribuzione
campionaria della statistica (stimatore) " .
Distribuzioni campionarie (intro)
Per semplicità, consideriamo lo schema di campionamento casuale semplice,
che corrisponde allo schema di estrazione con reinserimento.
Indichiamo con N la numerosità della popolazione, mentre indichiamo con n
la numerosità campionaria.
L’universo campionario (cioè l’insieme di tutti i possibili campioni di ampiezza
n che possono essere estratti da una popolazione di cardinalità N) è pari a
$ =%
Per curiosità, nel caso di caso di campionamento senza reimmissione, esso è
pari a
$ =
%
%!
=
! (% − )!
Distribuzioni campionarie (esempio)
Supponiamo di avere una popolazione di 4 macchinari (A, B, C, D) preposti
alla misurazione del tempo di reazione di una cellula fotoelettrica allo
spostamento d’aria. Supponiamo che, nel corso di una giornata, commettono
errori di misurazione rispettivamente pari a 1, 2, 3 e 4 millisecondi.
La media degli errori di tali macchinari è pari a 2,5, mentre la varianza è pari
a 1,25.
Supponiamo di essere interessati alla stima della media degli errori dei
macchinari.
Supponendo di estrarre un campione di n=2 macchinari, è possibile estrarre
un massimo di 4 = 16 possibili campioni differenti.
Distribuzioni campionarie (esempio)
Si ottengono i seguenti risultati:
n.b.
= 2,5;
)*+ = 0,625;
,-
=
, .
= 0,625
Distribuzioni campionarie (esempio)
Immaginiamo di estrarre tutti i campioni di numerosità 3
Si ottengono i seguenti risultati:
n.b.
= 2,5;
)*+ = 0,4167;
,0
=
, .
0
= 0,4167
Distribuzioni campionarie
Per qualsiasi v.c. che possiede varianza finita, la statistica media campionaria
ha valor medio pari al valor medio della popolazione e varianza pari alla
varianza della popolazione diviso per la numerosità campionaria.
Se X è una v.c. Normale, allora anche la v.c. media campionaria è una v.c.
Normale.
Distribuzioni campionarie notevoli:
differenza tra medie
Sia ( , , … , ) un campione casuale proveniente da
43
allora ∼ %(1, 5 ).
Sia ( , , … , 6 ) un campione casuale proveniente da
3 ∼ %(17 , 48).
9
∼ %(1, 2 ),
∼ %(17 , 27 ), allora
Se i due campioni sono indipendenti, allora è noto che per qualunque
443
3
combinazione lineare (* + ; ) ∼ %((*1 + ;17 ), (*
+ ; 8)).
5
9
La v.c. differenza tra medie campionarie 3 − 3 sarà anch’essa normale, con
la conseguenza che la corrispondente v.c. standardizzata si distribuisce come
una v.c. normale standardizzata:
3− 3
∼ %(0,1)
< =
,-
+
,86
Distribuzioni campionarie notevoli:
varianza campionaria
Sia ( , , … , ) un campione casuale proveniente da ∼ %(1, 2 ),
(?@ AB)supponiamo che allora 1 sia nota. Sia V = ∑ !
la varianza.
C
=D
2
!
?@ AB
,
=D
!
?@ ABE?3A?3
,
=D
!
?@ A?3
,
G con n gdl.
Poiché
F
,-
+
?3AB
,
G con 1 gdl, poiché
?3AB
,
=
?3AB
,/
si decompone nella somma di 2 v.c. di cui una è una v.c. G
teorema di Fisher e Cochran segue che ∑ !
J
H@ IH
4
∼G
A
Se Q, Q1 2 Q2 sono forme quadratiche tali che Q=Q1+Q2, e se K ∼ G L e
K1 ∼ G L , allora K2 ∼ G L0 con g3=g1-g2 con q1 e q2 indipendenti.
, per il
Distribuzioni campionarie notevoli
Questo significa che ( − 1)4M- ∼ G
-
A
A fini inferenziali (per i test statistici) dai risultati precedenti risulta che:
3−1
<
"=
=
∼# A
N /
G A
−1
3− 3
6( E6A )
∼ # E6A
"=
E6
( − 1)N + O − 1 S7
2? G A /( − 1)
N?
=
∼
=
N7 27 G 6A /(O − 1)
A ,6A
Proprietà degli stimatori: introduzione
La conoscenza della distribuzione campionaria dello stimatore è necessaria sia
per valutare la bontà di una particolare procedura di stima, sia per
confrontare tra loro stimatori alternativi.
- Quali sono i criteri per stabilire se uno stimatore è un «buon» stimatore?
- Proprietà per «piccoli campioni»
- Proprietà per «grandi» campioni
- Quali sono i metodi di costruzione degli stimatori?
- Metodi «classici» (parametrici)
- Metodi «moderni» (computazionali)
Proprietà degli stimatori: Correttezza
Uno stimatore T si dice corretto per
se
Q " =
Evidentemente, se Q " ≠ lo stimatore si dice distorto, e la distorsione è
definita dalla grandezza ; " = Q " − .
La v.c. media campionaria è uno stimatore corretto poiché Q 3 = 1.
La v.c. varianza campionaria è uno stimatore distorto poiché
Q N = 2 (1 − )
Poiché la distorsione è nota, è agevole provvedere alla correzione della
statistica calcolando la varianza campionaria corretta in questo modo
1
D
−1
!
− ̅
Proprietà degli stimatori: Efficienza
L’Errore Quadratico Medio di uno stimatore T si definisce come
TNQ = Q " −
E si decompone nella somma della varianza dello stimatore e del quadrato
della sua distorsione:
TNQ = Q " − Q "
=Q "−Q "
Varianza
+ Q " −
+ Q " −
=
Distorsione
Se uno stimatore è corretto, l’errore quadratico medio coincide con la
varianza.
Proprietà degli stimatori: Efficienza
Per confrontare due stimatori T1 e T2 per si può misurare l’efficienza relativa di T1
rispetto a T2 rapportando i rispettivi Errori Quadratici Medi.
U
TNQV
"1, "2 =
TNQV
Se eff(T1,T2)<1, allora lo stimatore T1 è efficiente relativamente a T2
Supponiamo che uno stimatore T sia corretto: esiste un limite inferiore alla sua
varianza?
Si può dimostrare (Disuguaglianza di Cramér & Rao) che
C*+ " ≥ X
A
Dove X A è l’informazione di Fisher (vedi oltre)
Se esiste uno stimatore corretto per che raggiunge il limite di Cramér e Rao, allora
esso è unico.
Proprietà asintotiche degli stimatori
Uno stimatore T si dice asintoticamente corretto se
lim Q(") =
→]
Uno stimatore T si dice coerente (o consistente) in media quadratica se
lim TNQ(") = 0
→]
La coerenza in media quadratica implica la correttezza asintotica.
Uno stimatore T si dice coerente (o consistente) in probabilità se, ∀_ > 0
lim
→]
"−
<_ =1
La coerenza in media quadratica implica la coerenza in probabilità (ma non è
vero il contrario).
Proprietà asintotiche degli stimatori
Uno stimatore T si dice coerente (o consistente) quasi certamente se
( lim " − ) = 1
→]
Uno stimatore T si dice asintoticamente efficiente se
lim C*+ " = X
→]
A
Uno stimatore T si dice asintoticamente normale se lim
→]
" − Q(")
C*+(")
≤ # = Φ(#)
Metodi di costruzione degli stimatori:
Metodo dei momenti
I momenti di ordine r si definiscono come i valori medi delle potenze resime della v.c. X
1d = Q
d
=
e
]
A]
]
D
d
!
d
g
f
Metodi di costruzione degli stimatori:
Metodo dei momenti
Sia ∼
; un v.c. che possieda momenti Q d = 1d , + = 1,2, … , O
Se si indicano con Td i momenti campionari generati dal campione casuale
, ,…,
, il metodo dei momenti consiste nel risolvere rispetto a il
sistema delle prime m equazioni
1d
= Td , + = 1,2, … , O
Il metodo dei momenti fornisce stimatori che godono di proprietà
asintotiche (sono coerenti, asintoticamente corretti e asintoticamente
normali).
Non sempre fornisce stimatori efficienti.
Metodi di costruzione degli stimatori:
Metodo dei minimi quadrati
Sia
, ,…,
un campione casuale proveniente da ∼
; . Se
ognuna delle v.c. componenti il campione casuale può essere interpretata
come la somma di una componente deterministica e di una quantità stocastica
+_
=h
Allora si può utilizzare il metodo di stima dei minimi quadrati.
La parte deterministica h
è formata da funzioni note e a valori reali del
parametro , mentre le v.c. _ hanno valore atteso nullo, varianza costante e
sono incorrelate tra loro.
Il metodo dei minimi quadrati deriva la stima del parametro (o del vettore
vettore di parametri) in modo tale che
i
=D
!
−h
=O Metodi di costruzione degli stimatori:
Metodo dei minimi quadrati
La soluzione di minimo si ottiene derivando iN
l’equazione ij
=0
D
!
(
−h
rispetto a
e risolvendo
kh
)
=0
k( )
Al variare dei campioni, tale soluzione genera una funzione delle v.c.
campionarie che definisce lo stimatore dei minimi quadrati per .
Nell’ambito di stimatori lineari (vedi seminario sulla regressione lineare), si
può dimostrare che detti stimatori sono BLUE (Best Linear Unbiased
Estimators).
Gli stimatori dei minimi quadrati sono asintoticamente normali e coerenti. Per
l’applicazione di tale metodo non è necessario conoscere la distribuzione di
probabilità della v.c. che genera il campione.
Metodi di costruzione degli stimatori:
Metodo della massima verosimiglianza
Sia
, ,…,
un campione casuale proveniente da ∼
; .
Abbiamo già visto che ( ; ) = ( ; ) ( ; ) … ( ; ) = ∏ ! ( ; )
è la funzione di densità congiunta del campione casuale. Essa, prima di
estrarre il campione, e il parametro (o il vettore di parametri) fisso, esprime
la probabilità di estrarre proprio quel campione casuale
Supponendo che il campione sia stato estratto, supponendo che sia
incognito, la quantità ℒ( ; ) = ( ; ) ( ; ) … ( ; ) = ∏ ! ( ; )
prende il nome di funzione di verosimiglianza, ed è funzione del solo
parametro .
Essa esprime la plausibilità di ottenere quel campione casuale le cui
determinazioni numeriche si sono effettivamente realizzate. Se ℒ( ; ) >
ℒ( ; ), allora è maggiormente verosimile che il parametro caratterizzante la
v.c. nella popolazione sia e non .
Metodi di costruzione degli stimatori:
Metodo della massima verosimiglianza
Spesso si preferisce lavorare con il logaritmo della funzione di verosimiglianza,
C = nohℒ( ; ) = D
!
noh ( ; )
Si definisce la funzione score la derivata della funzione di verosimiglianza
rispetto al parametro
knohℒ( ; )
j
C =
k
Se valgono alcune condizioni di regolarità sulla funzione di verosimiglianza
(esistenza per ogni x delle derivate fino al terzo ordine, valore atteso del
quadrato della funzione score finito), allora si ha che
Q C j = 0; C*+ C j = Q C j
= −Q C jj = X( )
Metodi di costruzione degli stimatori:
Metodo della massima verosimiglianza
La grandezzaX( ) prende il nome di informazione (attesa) di Fisher. Questa
grandezza può essere interpretata come un indice della rapidità di caduta
della funzione di (log)verosimiglianza intorno al suo punto di massimo, e di
conseguenza del grado relativo di preferenza che la verosimiglianza assegna al
valore di corrispondente al suo massimo rispetto a valori alternativi.
Il metodo di stima della massima verosimiglianza propone come stima per
il valore #( , , … , ) per il quale la funzione di verosimiglianza è massima.
La soluzione della funzione score corrisponde quindi alla stima di massima
verosimiglianza. Al variare del campione essa descrive una v.c. che
rappresenta lo stimatore di massima verosimiglianza.
Metodo della massima
verosimiglianza: proprietà
Sotto le condizioni di regolarità, gli stimatori di massima verosimiglianza
possiedono tutte le proprietà considerate ottimali.
- Invarianza: se T è lo stimatore di massima verosimiglianza per e se
p=f
è una funzione biunivoca di , allora f " è lo stimatore di
massima verosimiglianza per f
- Coerenza: gli stimatori di massima verosimiglianza sono coerenti e
asintoticamente corretti
- BAN: per gli stimatori di massima verosimiglianza vale che
q
" → %( , X A ). Quindi sono stimatori BAN (Best Asintotically Normal)
- Se esiste uno stimatore T non distorto e efficiente per , e se T* è la
soluzione di massima verosimiglianza di C′( ), allora " ≡ " ∗
- Se esiste uno stimatore efficiente per , allora lo stimatore di massima
verosimiglianza coincide con esso ed è quindi efficiente per ogni n finito. Se
non esiste uno stimatore efficiente per , allora lo stimatore di massima
verosimiglianza è comunque asintoticamente efficiente.
Stima per intervalli
Per quanto accurata sia la stima e per quanto sia affidabile lo stimatore, a volte
è preferibile accompagnare il risultato numerico derivato dal campione con una
misura di affidabilità circa la sua collocazione più probabile.
Sia
, ,…,
un campione casuale proveniente da ∼
; . Si
definisce variabile casuale pivot una v.c. )( ; ) che è funzione sia del
campione che del parametro incognito (quindi, non è una statistica), ma la cui
distribuzione di probabilità è indipendente da parametri incogniti.
Se esiste una v.c. pivot per , e se la funzione che definisce la stessa è
invertibile, allora si può scrivere che
)u ≤ ) ; ≤ Cv = () A )u ,
≤ ≤ ) A )v , ) = 1 − w
Si può definire allora un intervallo casuale con coefficiente di confidenza 1 − w,
i cui limiti sono ) A )u , e ) A )v ,
Sia
,
Stima per intervalli: v.c. pivot
,…,
un campione casuale proveniente da
∼ % 1; 2 .
HIy
Poiché sappiamo che Z = 4/
∼z({, ), allora Z è una v.c. pivot perché la sua
5
distribuzione di probabilità non dipende da 1.
J
HIy
∼~ 5I• . Allora T è una v.c. pivot
Se 2 è incognita, sappiamo che T = }/
5
perché la sua distribuzione di probabilità non dipende da 1.
J
E così è vero per tutte le distribuzioni notevoli che abbiamo incontrato prima.
In genere,
Se esiste uno stimatore di massima verosimiglianza T per un parametro di
posizione (come la media), allora la v.c. T- è una v.c. pivot. Se è un
parametro di scala (come la varianza), allora la v.c. T/ è una v.c. pivot.
Sia
,
Stima per intervalli: v.c. pivot
,…,
Poiché < =
?3A€
,/
un campione casuale proveniente da
∼ %(0,1) allora si può dire che
3−
2/
Da cui Xƒ
< •(‚/
A‚
)
=1−w
= 3 ∓ •(‚/ ) 2/
∼%
;2 .
Stima per intervalli
Prima dell’estrazione del campione, si potrebbe parlare di probabilità che il
parametro incognito nella popolazione sia incluso tra i limiti inferiore e
superiore dell’intervallo casuale;
Dopo che il campione è stato estratto, la probabilità che il parametro incognito
ricada all’interno dei limiti inferiore e superiore vale 1 se l’affermazione è vera
e 0 altrimenti.
Si parla quindi di intervalli di confidenza, con grado di confidenza pari a 1 − w,
perché ripetendo l’esperimento un numero elevato di volte i limiti
dell’intervallo casuale conterranno il parametro incognito in una frazione pari a
1 − w %.
Stima per intervalli
Da una popolazione generata da una normale con media pari a 120.92 e varianza
pari a 49 si sono estratti 100 campioni casuali di ampiezza 40. Si riportano 100
intervalli di confidenza al 95%
Stima per intervalli
Da una popolazione generata da una normale con media pari a 120.92 e varianza
pari a 49 si sono estratti 100 campioni casuali di ampiezza 40. Si riportano 100
intervalli di confidenza al 99%
Stima per intervalli
Da una popolazione generata da una normale con media pari a 120.92 e varianza
pari a 49 si sono estratti 100 campioni casuali di ampiezza 40. Si riportano 100
intervalli di confidenza al 90%
Stima per intervalli
La stima per intervalli in questo modo è possibile se si suppone che la v.c. che
governa il fenomeno oggetto di studio nella popolazione sia Normale.
Se ciò non dovesse essere verificato, e si ha conoscenza del momento
secondo, si può ricorrere alla disuguaglianza di Tchebycheff
3−1 ≤ _ ≥ 1−
2 /
_
Alternativamente si può ricorrere ad intervalli di confidenza non parametrici,
(ad es. Bootstrap, vedi oltre).
Metodi di stima computazionali
Ai metodi di stima «moderni» si può far ricorso in situazioni diverse:
- Le condizioni di regolarità possono non essere soddisfatte, o la condizione di
massimo può essere raggiunta solo per via numerica. In questo caso si
utilizzano metodi di ottimizzazione numerica, quali ad esempio:
- Il metodo Newton_Raphson (molto utilizzato per problemi di stima dei parametri nei
modelli lineari generalizzati);
- Il metodo Tri-section (metodo molto semplice, ma anche poco efficiente);
- Il metodo dello scoring (simile al metodo Newton-Raphson, ma che sfrutta le proprietà
statistiche della funzione di verosimiglianza);
- Algoritmi di «Majorizing», come l’algoritmo SMACOF (metodo iterativo per la
minimizzazione di funzioni di perdita –come nel caso dei minimi quadrati- molto
utilizzato in statistica multivariata per problemi di multidimensional scaling);
- Algoritmi di Alternating Least Squares (metodi iterativi per la minimizzazione di funzioni
di perdita, molto utilizzati per problemi di regressione non lineare).
- ….
Metodi di stima computazionali
Ai metodi di stima «moderni» si può far ricorso in situazioni diverse:
- Si può avere una conoscenza solo approssimata o addirittura inesistente
della v.c. che ha generato il campione.
-
Si può avere l’esigenza di rendere maggiormente «robuste» le stime che
ottengono.
- Si può avere l’esigenza di pervenire a stime intervallari senza avere alcuna
idea della distribuzione di probabilità nella popolazione
- Bootstrap
- Jacknife
- Cross-validation
- Ensemble methods (Bagging, Boosting, Random Forest,…)
Bootstrap
Tecnica che fa parte della famiglia dei metodi di ricampionamento.
Dal campione osservato si estraggono B campioni casuali con ripetizione della
stessa numerosità del campione osservato.
Per ciascuno di tali campioni si calcolano le grandezze (stime) di interesse,
ottenendone così una successione.
Il bootstrap viene maggiormente utilizzato per:
• Stimare la distorsione;
• Stimare la varianza;
• Generare intervalli di confidenza, generalmente con il metodo del
percentile.
Bootstrap: toy example 1
Si è generato un «campione casuale» da una v.c. normale di dimensione 100.
Immaginiamo che esso sia la nostra popolazione e valutiamo la distorsione con
il metodo bootstrap.
Abbiamo (nella popolazione) 1 = 9,9439 e 2 = 8,3158.
Generiamo 10000 campioni bootstrap e valutiamo la correttezza degli stimatori
media e varianza campionaria (esempio eseguito con MatLab).
Abbiamo che Q 3‰ − 1 = −0,00001, Q N‰ − 2 = −0,0831588
Lo stimatore media campionaria (come è noto) è corretto, mentre lo
stimatore media campionaria è (come altrettanto noto) distorto.
Sappiamo anche che la distorsione è pari a −
,-
Dai dati della nostra «popolazione» abbiamo che
.
—,0 .—
{{
= 0,083158
Bootstrap: toy example 2
Dal dataset «auto-mpg» (UCI machine learning repository) stimiamo la retta dei
minimi quadrati (vedi seminario su regressione lineare). Si vuole spiegare il
consumo delle automobili espresso in miglia per galloni a partire da una serie
di caratteristiche delle auto. Si riportano sia gli intervalli di confidenza (95%) sui
coefficienti sia gli stessi calcolati con 10000 ripetizioni boostrap (percentile CI)
Beta CI_lower CI_upper
intercept
-17,955 -27,150 -8,759
cylinders
-0,490 -1,121
0,142
displacement 0,024
0,009
0,039
horsepower -0,018 -0,045
0,009
weight
-0,007 -0,008 -0,005
acceleration
0,079 -0,114
0,272
model year
0,777
0,675
0,879
origin_EU
2,630
1,516
3,744
origin_JAP
2,853
1,766
3,940
Boot_CI Boot_CI
Boot_Beta lower upper
intercept
-17,746 -27,583 -7,859
cylinders
-0,492 -1,079 0,130
displacement
0,024 0,007 0,041
horsepower
-0,018 -0,047 0,009
weight
-0,007 -0,008 -0,005
acceleration
0,075 -0,170 0,319
model year
0,776 0,672 0,881
origin_EU
2,631 1,338 3,906
origin_JAP
2,858 1,812 3,926
Jackknife
Tecnica che fa parte della famiglia dei metodi di ricampionamento.
Dal campione osservato di numerosità n si estraggono tutti i possibili n
campioni di numerosità n-1 ottenuti eliminando a turno dal campione la i-ma
unità.
Si procede in maniera analoga al metodo bootstrap.
Il metodo jackknife viene maggiormente utilizzato per la costruzione di
intervalli di confidenza.
Metodi Ensemble
Tecniche che fanno parte della famiglia dei metodi di ricampionamento,
principalmente per modelli di regressione (parametrica e non parametrica) e di
classificazione supervisionata (vedi seminari su regressione non parametrica e
sullo statistical learning).
Un ensemble è una aggregazione di classificatori con lo scopo di combinare in
qualche modo le decisioni individuali di ciascuno di questi per classificare
nuove osservazioni.
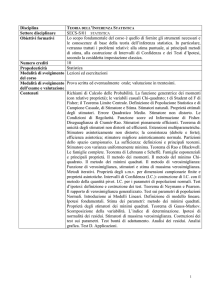
La particolarità del BAGGING (Bootstrap Aggregating) consiste nell’utilizzare il
Bootstrap come metodo di ricampionamento; questo significa che la
probabilità di essere estratto, per ciascun individuo, è costante in ogni prova e
uguale per tutti. La stima finale è quindi l’aggregazione della risposta dei
modelli di regressione o di classificazione attraverso la media o utilizzando
«majority rules».
Metodi Ensemble
0.2
test error single tree
test error Bagging
0.18
0.16
0.14
test error
0.12
0.1
0.08
0.06
0.04
0.02
0
0
5
10
15
20
25
30
Bootstrap replications
35
40
45
50
Metodi Ensemble
BOOSTING
L’IDEA:
Addestrare l’algoritmo di apprendimento (weak learner) su un data set e
costringerlo ad imparare dai propri errori a classificare in modo corretto.
Weak learner:
Classificatore almeno moderatamente accurato (le sue previsioni devono
essere almeno leggermente migliori rispetto ad una scelta totalmente casuale).
Si ricampiona dal set di dati in modo che le osservazioni malclassificate (o con
valori maggiori della funzione di perdita) hanno maggiore probabilità di essere
estratte, forzando il weak learner ad addestrarsi sugli errori commessi per
poterli correggere.
La stima finale è l’aggregazione della risposta ponderata dei modelli di
regressione o di classificazione attraverso medie ponderate o a utilizzando
«majority rules».
Metodi Ensemble
Cross-Validation
CROSS-VALIDATION
Molto simile concettualmente al Jackknife nella sua forma più estrema (leaveone-out cross-validation).
L’idea:
Dividere il set di dati di numerosità n in V sottocampioni di numerosità n/ V (in
genere si pone V=10).
Si procede effettuando V analisi (escludendo di volta in volta il subset di dati
corrispondente alla frazione n/ V), testando il modello solo sulla parte restante
del modello.
Metodo molto utilizzato nei metodi di regressione e classificazione non
parametrici (alberi di classificazione e regressione, criterio di scelta dei
parametri di penalizzazione nelle p-splines) e anche nei metodi di regressione
parametrica (ridge regression, procedure di optimal scaling)
Cross-Validation
Albero di classificazione validato via cross-validation. Funzione di goodness:
˜? rank correlaztion coefficient.
Cross-Validation
Cross-validation applicata al criterio di selezione della penalità per l’utilizzo delle psplines
Test delle ipotesi statistiche
Si può derivare un test delle ipotesi supponendo nota la distribuzione
di probabilità di una v.c. X, quindi l’inferenza si riferisce ai soli parametri
che la specificano (Test Parametrici)
Si può derivare un test senza fare assunzioni stringenti sulla forma
analistca della distribuzione di probabilità della v.c. X (ma qualche
assunzione minimale va fatta: unimodale? continua? simmetrica?
Possiede momento r-mo finito?). L’inferenza riguarda quindi sia la
forma che i parametri (Test non parametrici, o distribution free).
Test delle ipotesi statistiche
Un test è una regola istituita sullo spazio campionario mediante la
quale, in funzione del campione osservato, si decide se rifiutare o meno
una ipotesi ™{ riferita alla popolazione.
Un’ipotesi statistica è una affermazione che specifica completamente
(ipotesi semplice) o parzialmente (ipotesi composita) la distribuzione
di probabilità di una v.c. X.
∼ % 10,9 ; ∼ o 0,5 ; ∼ šf 1,6 ; … ipotesi semplici. Quando sono vere la
conoscenza di X è completa
∼ % 5, 2 ; ∼ o ; ∼ šf 1, % ; … ipotesi composite. Quando sono vere non
consentono di pervenire alla conoscenza di un’unica v.c. ben definita.
Test delle ipotesi statistiche
Si intende per ipotesi nulla (™{ ) l’ipotesi preesistente rispetto
all’esperimento campionario. E’ l’ipotesi che sussiste fino a prova
contraria.
L’ipotesi alternativa (™ ) è l’ipotesi complementare rispetto a ™{ .
E’ importante precisare subito che, qualora non fosse vera ™{ , non è
detto che sia vera ™ .
™{ e ™ sono esaustive e disgiunte: vale l’una o vale l’altra.
Test delle ipotesi statistiche
Il test è una regola basata sullo spazio campionario che si concretizza in
una funzione definita sull’insieme di tutti i possibili campioni generati
da X. Per alcuni valori
, ,…,
∈ œ{ per cui ∉ ž{ , (ž{ ⊂ Ω )
la regola imporrà di rigettare ™{ ,mentre per altri valori
, ,…,
∉ œ{ per cui ∈ ž{ la regola imporrà di non rigettare
™{ .
œ{ è detta regione critica (RC) per ™{ . La regione complementare è
detta regione di accettazione.
Poiché se l’ipotesi riguarda il parametro le informazioni riguardo ad
esso possono essere sintetizzate senza danno attraverso gli stimatori, la
regola decisionale definita tramite il campione casuale su œ{ si traduce
in una nuova regola fondata sullo stimatore (o statistica) " sulla base
di ƒ{
, ,…,
∈ œ{ ⇔ " ∈ ƒ{
Struttura probabilistica di un test
In teoria, prima di prendere una decisione, sono possibili le seguenti 4
situazioni
¦§ è vera
¦§ è falsa
Si rigetta ™{
Errore 1 (di prima specie)
Si rigetta ™{
Decisione Giusta 2
Non si rigetta ™{
Non si rigetta ™{
Decisione Giusta 1
Errore 2 (di seconda specie)
Dopo aver deciso se rigettare o meno ™{ , si può solo aver preso la
decisione giusta o aver commesso un errore.
w = E1 = Pr(rigettare ™{ |™{ è vera) = Pr(" ∈ ƒ{ |™{ )
¤ = E2 = Pr(non rigettare ™{ |™{ è falsa) = Pr(" ∉ ƒ{ |™ )
¥ = 1 − ¤ = Pr(rigettare ™{ |™{ è falsa) = Pr " ∈ ƒ{ ™
(decisione giusta 2, nota come POTENZA DEL TEST)
1 − w = Pr(non rigettare ™{ |™{ è vera) = Pr(" ∉ ƒ{ |™{ )(decisione giusta 1)
Struttura probabilistica di un test
Sarebbe auspicabile richiedere che la RC sia tale che sia w che ¤ siano
ragionevolmente piccole.
A parità di numerosità campionaria, non è possibile far tendere a zero
entrambe le probabilità di errore.
¤
1
1
w
Si potrebbe fissare w e scegliere la RC che minimizza ¤;
Si potrebbe fissare ¤ e scegliere la RC che minimizza w;
Si opta per la prima soluzione, poiché si ritiene più grave commettere
l’errore di prima specie (è più rischioso modificare a torto la realtà piuttosto che
persistere nella medesima situazione laddove non fosse più vera)
Struttura probabilistica di un test
Si definisce regione critica ottimale di ampiezza ¨ (RCO(w)) una RC per
™{ tale che Pr " ∈ ƒ{ ™{ = w e che, per qualsiasi altra RC ©j§ di
eguale ampiezza risulti:
¤ ƒ{ = Pr " ∉ ƒ{ ™ < Pr " ∉ ƒ{j ™ = ¤ ƒ{j .
E’ quindi ottimale la regione critica che, a parità di tutte quelle di
ampiezza w, possiede la più elevata potenza del test
¥ ª{ > ¥(ƒ{j )
Un buon test è quello con la potenza più elevata a parità di probabilità
di commettere l’errore di prima specie. Come si costruiscono le RCO(w)?
Lemma di Neyman Pearson
Sia X = ( , , … , ) un campione casuale generato da ∼ ( ; ).
Si vuole verificare ™{ : = { contro ™ : = . Sia i( ; ) la funzione
di verosimiglianza di X. La œƒ-(w) per ™{ contro ™ è quella regione ƒ{
che soddisfa:
dove i = i
i
*) ≥ ª; ;)Pr(X ∈ ƒ{ ™{ = w
i{
;
ei{ = i
{;
.
a) Implica che ƒ{ viene costruita in modo tale che l’ipotesi alternativa
deve risultare c volte più verosimile
b) Implica che la costante c è determinata in modo che la probabilità di
commettere l’errore di prima specie sia pari a w
Test di significatività
Si utilizza solo ™{ e ci si chiede se i dati sostengono tale affermazione.
L’ipotesi alternativa non è mai specificata.
Ci si basa sul p-value: g = Pr(" > #|™{ ), definito cioè come probabilità
che, se è vera ™{ , lo stimatore " assuma un valore almeno estremo
come la stima # osservata.
Non è possibile calcolare la potenza del test
Test uniformemente più potente
La potenza del test è definita come ¥ = Pr(" ∈ ƒ{ | = ). Se si
prende in considerazione qualsiasi valore di ∈ Ω( ), si definisce
funzione potenza
¥
= Pr " ∈ ƒ{
, ∀ ∈ Ω ,
w = sup ¥( )
€∈¯°
Sia ƒ{ una RC di ampiezza w. Un test si dice uniformemente più potente
šT ‚ se
≥ ¥ ∗ ∀ ∉ ž{
¥
dove ¥ ∗
è la funzione potenza di qualsiasi altro test di eguale
ampiezza.
Test LRT
Il test del rapporto di verosimiglianza (LRT) si basa sul rapporto tra la
verosimiglianza massimizzata sotto ™{ e la verosimiglianza massimizzata
senza alcun vincolo.
Sia X =
, ,…,
un campione casuale generato da ∼ ( ; ).
Si vuole verificare ™{ : ∈ ž{ contro ™ : ∉ ž{ . Si costruisce il
rapporto
max i( ; )
€∈¯°
=
±
max i( ; )
€∈³(€)
La RC è costruita in modo che sia
Pr ±
≤ ª‚ ™{ = w.
ƒ{ = { : ±
≤ ª‚ } è una RC costruita con il metodo LRT
Test LRT
Se è applicabile il Lemma di Neyman-Pearson, il LRT produce œƒ-(w)
coincidenti.
Sotto opportune condizioni di regolarità, se è vera ™{ allora
−2 log ±
q
→ G(L)
dove g è il numero di dimensioni dello spazio parametrico sotto ™{
(teorema di Wilks)
Test asintotici: Score test
Sia X =
, ,…,
un campione casuale generato da ∼ ( ; ·).
Si vuole verificare ™{ : · ∈ ·§ contro ™ : · ∉ ·§ . Sia C j (·) il vettore
degli score rispetto ai parametri:
k log i ·;
j
C · =
k
Si può dimostrare che
N
=
Cj
·§
k log i ·;
,
k
V
X ·§
A
k log i ·;
,…,
k 6
Cj
V
q
·§ → G(6)
Lo score test, rispetto al LRT, necessita solo del calcolo delle derivate
della funzione di verosimiglianza per · = ·§
Asintoticamente LRT e score test sono equivalenti
Test asintotici: test di Wald
Sia X =
, ,…,
un campione casuale generato da ∼ ( ; ·).
Si vuole verificare ™{ : · ∈ ·§ contro ™ : · ∉ ·§ . Si può dimostrare che
¸
= ¹º − ·§
VX
q
¹º ¹º − ·§ → G(6)
Asintoticamente LRT e score test e test di Wald sono equivalenti
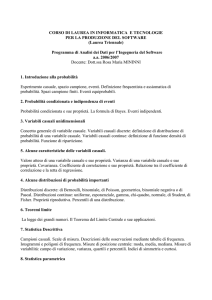
LRT, Score test e test di Wald
When → ∞ the
three test statistics
have equivalent
properties.
For small the
Likelihood ratio
statistic is more
reliable than the
Wald statistic.
71
Principali test parametrici:
Test sul valore medio, varianza nota:
™ : 1 > 1{ œƒ- w 3 ≥ 1{ + •‚ 2/√
™ : 1 < 1{ œƒ- w 3 ≤ 1{ − •‚ 2/√
™{ : 1 = 1{ 3 ≥ 1{ + •‚/ 2/√
™ : 1 ≠ 1{ œƒ- w ½
3 ≤ 1{ − •‚/ 2/√
Test sul valore medio, varianza ignota:
™ : 1 > 1{ œƒ- w 3 ≥ 1{ + #(‚,L) ¾/√
™ : 1 < 1{ œƒ- w 3 ≤ 1{ − #(‚,L) ¾/√
™{ : 1 = 1{ 3 ≥ 1{ + #(‚/ ,L) ¾/√
™ : 1 ≠ 1{ œƒ- w ½
3 ≤ 1{ − #(‚/ ,L) ¾/√
Principali test parametrici:
Test sulla varianza, media ignota:
™{ : 2 = 2{
™ : 2 > 2{ œƒ- w N ≥ G(‚,L) 2{ /( − 1)
™ : 2 < 2{ œƒ- w N ≤ G(
A‚,L) 2{ /(
N ≥ G(‚/
™ : 2 ≠ 2{ œƒ- w ½
N ≤ G(
,L) 2{ /(
A‚/ ,L) 2{ /(
− 1)
− 1)
− 1)
Test sulla differenza tra medie, varianze ignote (note), campioni
indipendenti…
Test sulla differenza tra medie, varianze ignote (note), campioni
dipendenti (appaiati)…
Test sul rapporto tra varianze…
…and so on
Principali test non parametrici:
Test dei segni
Test di Wicoxon
Test di Mann e Whitney
Goodness of fit tests (test chi quadrato, test di Kolmogorov-Smirnov,
test di Jarque-Bera,…)
And so on
Letture consigliate
• Azzalini, A. Inferenza statistica, Springer, 2008
• Casella, G., Berger, R. Statistical inference, Brooks/Cole Pub. Co., 1990
• Erto, P. Probabilità e statistica per le scienze e l'ingegneria, McGraw-Hill,
2008
• Hastie, T., Tibshirani, R., Friedman, J.H. The elements of statistical learning,
Springer, 2009
• Landenna, G., Marasini, D., Ferrari, P. Teoria della Stima, Il Mulino 1997
• Landenna, G., Marasini, D., Ferrari, P. La verifica di ipotesi statistiche, Il
Mulino 1998
• Lindgren B., W. Statistical theory, Chapman & Hall, 1993
• Piccolo, D. Statistica, Il Mulino, 1998.
• Rice, J. Mathematical Statistics and Data Analysis, Duxbury, 2007
• …