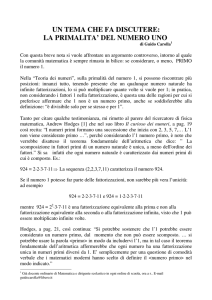
Fattorizzazione di Matrici Tridiagonali
a1
b
2
A = ..
c1
a2
..
c2
..
bN −1
..
a N −1
bN
.. = L U =
c N −1
a N
1
β
2
..
0
1
..
0
..
β N −1
..
1
βN
..
0
1
α 1 c1
0 α
2
.. ..
c2
..
0
..
α N −1
0
..
c N −1
α N
Dove, se la fattorizzazione è possibile:
α1 = a1,
βi = bi / αi-1 , αi = ai- βi ci-1 , i = 2, 3, …, N
N.B. In caso non fosse necessario conservare i valori delle diagonali a e b è
possibile eseguire la fattorizzazione sovrapponendo i valori di α e β a quelli di a e b
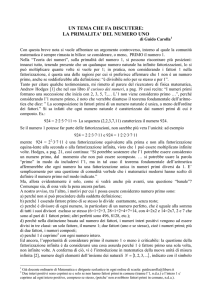
Risoluzione di un sistema lineare con matrice tridiagonale
Ly = f
Ux = y
Ax=f →
L y = f sostituzione in avanti
y1 = f1
yi = fi - βi yi-1 , i = 2, 3, …, N
Ux = y sostituzione all’indietro
xN = yN / αN
xi = (yi – ci yi+1 ) / αi , i = N-1, N-2, …, 1
N.B. In fase implementativa non è necessario creare il vettore y