GEOMETRIE NON EUCLIDEE NELLA PRATICA QUOTIDIANA
Tesina di Didattica della Geometria
Di
Gianfranco Di Panfilo
Gaetano De Michele
SSIS IX Ciclo-Università di L’Aquila
Docente del corso
Prof.Biancofiore
Fino al 1800 lo spazio euclideo era considerato fondamentale e necessario e si credeva la
geometria euclidea fosse l' unica idealizzazione corretta dello spazio fisico.
Guardando il sole, la luna piena, il mare all’orizzonte, le prime forme regolari che si mostrarono
all'uomo furono la retta e il cerchio: con loro nacque la Geometria
Le testimonianze degli storici indicano i suoi albori in Egitto. I primi geometri dell'antichità furono,
infatti, gli agrimensori: tirando le funi, i geometri egizi potevano tracciare sul terreno rette e
cerchi, un'operazione di cui resta una traccia in molte lingue moderne, nell'espressioni “tirare una
retta”, “tirare una linea”.
La geometria euclidea è la geometria che si basa sui postulati di Euclide e in particolar modo sul
quinto,il cosiddetto postulato delle parallele.
Euclide opera ad Alessandria (d’Egitto). Intorno al 300 a.C. scrive gli Elementi, come summa del
sapere matematico dell’epoca.
Gli Elementi sono stati classificati come un sistema assiomatico materiale (in contrasto con i
sistemi assiomatici formali).
Sistemi assiomatici materiali
1) Si introducono i termini tecnici fondamentali del discorso e se ne chiarisce il significato (termini
primitivi)
2) Elenco di enunciati primari (detti assiomi o postulati) che riguardano i termini primitivi e che sono
ritenuti veri rispetto alle definizioni date in 1).
3) Tutti gli altri termini tecnici sono definiti sulla base dei termini già introdotti.
4) Tutti gli altri enunciati sono dedotti logicamente da enunciati già accettati o postulati e sono detti
teoremi.
Postulati (proprietà ritenute vere per le grandezze geometriche)
I. Risulti postulato: che si possa condurre una linea retta da un qualsiasi punto a ogni altro punto.
II. E che una retta terminata si possa prolungare continuamente in linea retta.
III. E che si possa descrivere un cerchio con qualsiasi centro e ogni distanza.
IV. E che tutti gli angoli retti siano uguali fra loro.
V. E che, se una retta venendo a cadere su due rette forma gli angoli interni e dalla stessa parte
minori di due retti, le due rette prolungate illimitatamente verranno a incontrarsi da quella parte in
cui sono gli angoli minori di due retti.
Dall' epoca di Euclide fino al 1800 i geometri tentarono di dare una risposta a questa domanda
cercando di sostituire il postulato delle parallele con un altro facilmente intuibile o di dimostrarlo in
base agli altri postulati o assiomi; se fosse stata possibile questa seconda ipotesi, esso sarebbe
diventato un teorema.
Dal 1500 in poi il tentativo più importante su questa strada è quello del padre gesuita Gerolamo
Saccheri (1667-1733), che, nell'opera "Euclides ab omni naevo vindicatus", tentò una
dimostrazione per assurdo negando il quinto postulato. Saccheri era convinto che l'enunciato fosse
vero e che potesse essere dedotto dai precedenti: in effetti nella sua dimostrazione trovò un
risultato che gli sembrava assurdo, ma che non era in contraddizione logica con le premesse bensì
era contrario all'intuizione connessa con l'ipotesi euclidea. Saccheri era convinto di aver dimostrato
il quinto postulato, ma in realtà aveva gettato le basi per due tipi di geometrie non euclidee.
L'opera del padre gesuita Girolamo Saccheri [Sanremo, 1667-1733] è quella che apre la strada e
fornisce materiali e spunti essenziali per la scoperta delle geometrie non euclidee. Nel suo
Euclides ab omni naevo vindicatus; sive geometricus quo stabiliuntur prima ipsa geometriae
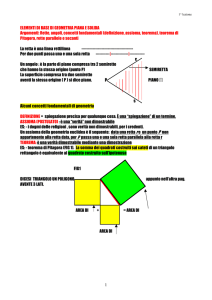
principia egli si propone di dimostrare il V postulato. Per fare questo egli costruisce una figura, il
quadrilatero birettangolo isoscele, detto anche quadrilatero di Saccheri. Il quadrilatero birettangolo
isoscele è un quadrilatero in cui gli angoli in A e in B sono retti e i lati AC e BD sono congruenti.
In geometria euclidea, usando il V postulato, si dimostra facilmente che tale quadrilatero è un
rettangolo.
Saccheri vuole dimostrare il V postulato ragionando per assurdo: egli intende sviluppare tutte le
ipotesi contrarie al V postulato e far vedere che “distruggono sé stesse”, cioè che conducono a
contraddizioni. Per far questo egli dimostra alcune proprietà che valgono indipendentemente dal V
postulato e quindi formula 3 ipotesi alternative.
Proprietà che valgono indipendentemente dal V postulato
• Le diagonali AC, BD sono congruenti.
Per provarlo si considerano i triangoli ABC, ABD. Poiché il lato AB è comune, il lato AC è
congruente a BD e gli angoli compresi sono entrambi retti, si ha che i triangoli sono congruenti. In
particolare, il lato BC è congruente al lato AD.
• L'angolo in C è congruente all'angolo in D.
Adesso si considerano i triangoli ACD, BDC; si vede subito che hanno tutti i lati congruenti: infatti
CD è comune, AD e BC sono congruenti per ipotesi e BD e AC sono congruenti per quanto visto in
precedenza. Quindi i triangoli ACD, BCD sono congruenti e in particolare lo sono gli angoli in C e
in D, che sono compresi fra lati a due a due congruenti.
Se non si fa uso del V postulato, 3 ipotesi sono possibili circa gli angoli in C e in D (che sono
congruenti fra loro).
1. • Ipotesi dell'angolo retto: gli angoli in C e in D sono entrambi retti. Questa ipotesi equivale
al V postulato e al fatto che la somma degli angoli interni di un triangolo sia 180° [geometria
euclidea].
2. • Ipotesi dell'angolo ottuso: gli angoli in C e in D sono entrambi ottusi. Questa ipotesi
equivale al fatto che la somma degli angoli interni di un triangolo sia maggiore di 180°
[geometria ellittica o sferica].
3. • Ipotesi dell'angolo acuto: gli angoli in C e in D sono entrambi acuti. Questa ipotesi
equivale al fatto che la somma degli angoli interni di un triangolo sia minore di 180°
[geometria iperbolica].
Saccheri si propone di provare che sia l'ipotesi dell'angolo ottuso, sia quella dell'angolo acuto sono
contraddittorie.
Nel caso dell'angolo ottuso riesce nell'intento: l'ipotesi dell'angolo ottuso è incompatibile con l'idea
che ogni retta sia infinita e porta quindi a contraddizioni. Nel caso dell'angolo acuto egli sviluppa
l'ipotesi in termini deduttivi, dimostra molti risultati di geometria iperbolica, fra cui il fatto che
esistono rette asintotiche, cioè rette che si avvicinano indefinitamente senza toccarsi mai. Questa
proprietà gli sembra contraddittoria, mentre invece è solo controintuitiva. Evidentemente il fatto di
cambiare un postulato cambia radicalmente la caratterizzazione degli enti geometrici, in particolare
delle rette. Quindi Saccheri crede di aver escluso l'ipotesi dell'angolo acuto: in realtà ne ha solo
mostrato la percorribilità, anche se al prezzo di un cambiamento della nostra intuizione di retta.
La geometria iperbolica si ottiene sostituendo al V postulato (o all’assioma delle parallele di Hilbert)
il seguente assioma, detto anche assioma di Lobacevskij: ‘Data una retta r e un punto P fuori di
essa, esistono almeno due rette passanti per P e tali da non intersecare la retta r in nessun punto.’
Da questo assioma si ricava immediatamente che le rette passanti per P che non intersecano r
sono in numero infinito: sicuramente tutte quelle comprese nell’angolo APB.
Gauss aveva definito l’idea di retta parallela iperbolica nel modo che segue:
‘La retta PA è parallela a r se non interseca r e se ogni retta compresa nell’angolo QPA interseca
r.’ In questo modo fra le infinite rette passanti per P e non secanti r ne vengono messe in evidenza
due (simmetriche rispetto alla retta PQ) che rapprersentano gli elementi di separazione fra la
classe delle rette secanti.
Fra le conseguenze dell’assioma di Lobacevskij sono degne di nota le seguenti proposizioni:
• La somma degli angoli interni di un triangolo non è costante ed è comunque inferiore a 180°.
• Nei quadrilateri di Saccheri vale l’ipotesi dell’angolo acuto.
• Se chiamiamo difetto angolare di un triangolo la differenza fra 180° e la somma degli angoli
interni, si ha che l’area del triangolo è direttamente proporzionale al difetto. In altre parole, al
crescere dell’area la somma degli angoli interni diminuisce fino a tendere a 0.
• Come conseguenza del punto precedente, esiste un numero che non può essere superato
dall’area di nessun triangolo.
Cenni sul modello di Poincaré
•
Cerchio euclideo C di raggio R in cui vive una popolazione di esseri bidimensionali.
•
Le dimensioni lineari di ogni oggetto (compresi i regoli) sono variabili, e diminuiscono se
l'oggetto si allontana dal centro di C. Un regolo di lunghezza 1 al centro del cerchio, se
spostato in modo che il suo punto medio disti r dal centro, ha (per un osservatore esterno)
lunghezza
•
Per gli abitanti di C le lunghezze degli oggetti sembrano invarianti rispetto alla posizione,
e il raggio di C sembra infinito.
•
In C i raggi di luce si propagano seguendo il cammino più breve tra due punti. Per gli
abitanti di C si tratta di segmenti, per noi si tratta di segmenti se e solo se i due punti sono
su uno stesso diametro, altrimenti sono archi di circonferenze ortogonali a C.
•
Per gli abitanti di C vale il postulato di Lobacevskij.
Il modello di Poincaré è un modello euclideo (perché costruito con ingredienti euclidei: punti, rette,
circonferenze, ...) della geometria iperbolica.
Quindi la non contraddittorietà della geometria iperbolica (come di quella sferica) si appoggia su
quella della geometria euclidea.
Per gli abitanti del cerchio di centro O l’arco AB (di una circonferenza ortogonale a quella di centro
O) è il cammino più breve tra A e B.
Parallelismo nel modello di Poincaré
Gli archi AB, AM, NB, ST, FG e il diametro ED sono rette nel modello di Poincaré, essendo archi di
circonferenze ortogonali alla circonferenza base. Il diametro è un caso limite perché è visto come
una circonferenza di raggio infinito.
Data la ‘retta’ AB e il punto P fuori di essa le ‘rette’ AM e NB sono le parallele di Gauss, in quanto
incontrano la ‘retta’ data sulla circonferenza base, che per gli abitanti del modello è all’infinito. La
‘retta’ FG è secante la retta data. ED, ST sono ‘rette’ non secanti la ‘retta’ data.
Sotto Riportiamo un Esempio di triangolo iperbolico (nel modello di Poincaré).
La somma angolare è inferiore a 180° e un Esempio d i triangolo nel modello sferico. Nel
modello sferico le rette sono circonferenze massime, cioè circonferenze il cui piano passa per il
centro. La somma angolare del triangolo è superiore a 180°. I lati sono archi di meridiani, e la base
è un arco di equatore.Inoltre la terza figura riporta il Quadrilatero di Saccheri nel modello sferico.
È verificata l’ipotesi dell’angolo ottuso. Le basi sono 1 arco di equatore e 1 arco di un’altra
circonferenza massima; i lati sono archi di meridiani.
Sulla sfera, quindi, si “realizza” l’ipotesi dell’angolo ottuso, essa è in contraddizione con uno o più
assiomi della geometria assoluta. Avendo presente il modello della sfera, non è difficile vedere
quali. Se guardiamo l’intera sfera balza evidente che le “rette” circonferenze massime, a differenza
delle rette euclidee, (a) sono linee chiuse e (b) per due punti estremi di un diametro della sfera
passano infinite “rette” (per due punti diametralmente opposti come i poli passano infiniti
meridiani).
Nella geometria ellittica si vuole conservare l’assioma euclideo secondo cui: «Per due punti distinti
passa una ed una sola retta». L’idea è la seguente: per due punti di una sfera passa una e un sola
circonferenza massima a meno che essi non siano diametralmente opposti. Riduciamo allora la
sfera a una semisfera (eliminando cosi i punti diametralmente opposti a quelli della semisfera).
Rimangono allora punti diametralmente opposti solo sulla circonferenza Γ che delimita la
semisfera. Imponiamo allora che i punti diametralmente opposti di tale circonferenza coincidano
in un unico punto, siano in sostanza “lo stesso punto” (figura)
Ci si convince facilmente che, dati due punti qualsiasi della semisfera, per essi passa una sola
“retta” (ossia una sola semicirconferenza massima), e lo stesso avviene sia se uno dei due punti è
una “coppia” di punti diametralmente opposti della circonferenza
che delimita la semisfera, sia
se entrambi sono “coppie” di tali punti (e in questo caso la “retta” è proprio la circonferenza ).
Come per la geometria sferica è soddisfatto l’assioma di Riemann e, inoltre, le “rette” sono linee
chiuse: se, ad esempio, si percorre la “retta” r da C a D e si prosegue fino a raggiungere Γ in A,
ci si trova nello stesso punto diametralmente opposto e si può continuare a percorrere r tornando
in C
D’altro lato, rimaneva pur sempre il problema del ruolo che potessero avere teorie assiomatiche
coerenti, ma in contrasto fra loro
Verso la fine dell’Ottocento,a seguito di un intreccio di vicende alquanto complesso, si è
lentamente affermata la visione moderna dell’assiomatica secondo la quale le teorie matematiche,
usando l’espressione esplicitamente citata nei programmi ministeriali, sono concepiti come sistemi
ipotetico-deduttivi. Ciò significa, in sintesi, che i concetti primitivi delle teorie matematiche non
hanno più (bisogno di) un preliminare riferimento ad enti esterni e, di conseguenza, gli assiomi non
sono più considerati né veri, né falsi: gli enti primitivi non vengono definiti e gli assiomi sono le
proposizioni che stabiliscono i legami tra gli enti primitivi che si assumono senza dimostrazione e
dai quali si può iniziare a dedurre logicamente i teoremi.
La geometria iperbolica si può però rappresentare anche con un modello diverso: un disco
all’interno del quale la velocità della luce sia in ogni punto uguale alla distanza fra la circonferenza
e il punto stesso, come dimostrò il matematico francese Jules Henri Poincaré (1854-1912).In
questo modello, i raggi di luce (le linee "rette") prendono la forma di archi di cerchio e sono sempre
perpendicolari al disco. Un’idea che affascinò l’artista olandese Maurits Cornelius Escher e che
ispirò alcune sue opere, come l’incisione "Limite del cerchio IV", nota anche come "Paradiso e
inferno". In essa è raffigurato un cerchio piastrellato con figure di angeli e diavoli che diventano
sempre più piccole quanto più ci si avvicina al bordo (esattamente come accade alla velocità della
luce nel modello di Poincaré)
Classicamente, si parla di due tipi di geometria non euclidea: la geometria ellittica (in cui le
parallele non esistono), e la geometria iperbolica (in cui per un punto passa più di una parallela a
una retta data).
Come già sapevano i geometri arabi, la geometria ellittica contraddice gli altri postulati di Euclide.
Ma questo non vuol dire che la geometria ellittica non esista, anzi: in un senso molto preciso, è
possibile realizzare la geometria ellittica all'interno della geometria euclidea. Infatti, basta prendere
una sfera e chiamare “rette” i cerchi massimi. In questo caso l'assioma delle parallele non vale
(due “rette” si intersecano sempre), ma non è neanche vero che per due punti passi una e una
sola “retta” (per due punti antipodali passano infinite “rette”). Per il seguito è importante notare che
i cerchi massimi sulla sfera, come le rette nel piano, sono le curve più brevi che congiungono due
punti. (geodetiche)
Se allarghiamo la visuale e consideriamo distanze di migliaia di chilometri sulla Terra, allora la
sfericità del pianeta comincia a farsi notare,
la geometria ellittica diventa importante.
I piloti degli aerei, per esempio, sanno benissimo che la rotta più breve fra due località si trova
sempre su un arco di cerchio massimo: è anche per questo che, per volare fra due aeroporti alla
stessa latitudine, gli aerei non seguono la linea immaginaria dei paralleli. Passare per il Polo Nord,
insomma, è spesso una scorciatoia.
Per trovare geometrie non euclidee basta guardarsi intorno. Possiamo recuperare le geometrie
ellittica e iperbolica come geometrie di due particolari superfici nello spazio euclideo; e anche la
geometria euclidea è la geometria di una particolare superficie nello spazio euclideo, il piano. Ma
perché limitarsi a queste tre superfici?
Uno scoiattolo che vuole arrivare in cima ad un albero deve trovare una traiettoria tale da
permettergli di salire col minimo sforzo (r5) e nel minor tempo possibile (r1)
In giro ce ne sono molte altre, altrettanto interessanti, e ognuna di queste fornisce una nuova
geometria non euclidea da studiare. E abbiamo anche gli strumenti adatti per studiare in maniera
unificata tutte queste nuove geometrie. Non gli strumenti della geometria classica, troppo legata a
rette e piani per riuscire a trattare efficacemente quasi qualunque oggetto anche solo un po' curvo,
ma i potenti mezzi forniti dal calcolo differenziale e integrale, dall'analisi matematica. Le geometrie
non euclidee non sono altro che un caso particolare di quel campo della geometria che ricade
sotto il nome di geometria differenziale, o, più precisamente, di geometria riemanniana.
Dall'intuizione di Riemann a oggi la geometria differenziale è diventata uno dei campi più fecondi
della geometria, con numerosissime applicazioni nel resto della matematica e anche al di fuori
della matematica. La fisica moderna, per esempio, sarebbe impensabile senza la geometria
differenziale; la relatività generale di Einstein dice esattamente che viviamo in uno spazio a quattro
dimensioni curvo proprio nel senso ipotizzato da Riemann
Il fenomeno cosmologico riportato in figura fu previsto da Einstein attraverso la teoria della
relatività, e fu osservato dagli astronomi durante l’eclissi totale di sole nel 1919
Cosa intendiamo per distanza:
•
•
“Intervallo di spazio che intercorre tra due cose, luoghi o persone”.
(mat.) - di due punti, “lunghezza del segmento che ha per estremi i due punti”.
•
Potremmo dire che matematica della distanza significa “disciplina che si avvale dei metodi
deduttivi per lo studio di insiemi dotati della struttura distanza, cioè studio degli spazi che
intercorrono tra gli elementi dell’insieme”.
La distanza di due punti P e Q, di coordinate rispettivamente (x1,y2,z3) ( x2, y2 ,z2)
• La distanza (euclidea) di due punti è:
• la radice quadrata della somma dei quadrati delle differenze delle coordinate omonime dei
punti
( x1 − x2 ) 2 + ( y1− y2 ) 2 + ( z1 − z 2 ) 2
Altri tipi di distanza: Il Tassista in una grande città come Manhattan
B
???
dT ( A, B) = dT (( x1 , y1 ), ( x2 , y2 ) ) =| x1 − x2 | + | y1 − y2 |
•
•
•
La curva di lunghezza minima non è necessariamente unica.
E’ unica nel caso della distanza euclidea.
Non è unica nel caso della distanza del tassista.
Se in uno spazio metrico X, qualunque siano i punti P e Q, esiste un’unica curva di lunghezza
minima che li congiunge, allora tale curva corrisponde al concetto di linea retta per lo spazio
metrico X. L’ignaro “abitante” dello spazio metrico X, che non vede nulla al di fuori di esso, quando
si muove lungo tale curva “pensa” di muoversi in linea retta. Anche se, vista da un altro ambiente,
tale curva è tutt’altro che diritta.
Quando noi camminiamo in linea retta (ad esempio lungo le rotaie della ferrovia), andiamo per
davvero in linea retta?
Sono molti i programmatori e gli artisti che hanno immaginato e progettato possibili "mappe della
rete".
Uno dei primi tentativi fu fatto dal programmatore e hacker Canadese Tim Bray, che nel 1995
raccolse, grazie ad un software particolare, informazioni sulle dimensioni e le connessioni di oltre
90.000 siti, per un totale di 11 milioni di pagine, e rappresentò poi queste informazioni in uno
spazio tridimensionale:
Nella mappa ideata da Bray, i siti hanno un po' la forma dei pedoni degli scacchi, in cui la base
indica il numero di pagine contenute, l'altezza è proporzionale al numero di link che portano al sito,
mentre la dimensione della "testa" rappresenta il numero di link che da questo portano ad altri siti.
Internet a partire dai i primi schizzi a mano tracciati negli anni '60, quando la rete era solo un
esperimento militare chiamato "Arpanet".
Per quanto affascinanti, le rappresentazioni del web in tre dimensioni sono limitate. Se volessimo,
infatti, illustrare l'intera struttura di un sito, dovremmo adottare una rappresentazione "a piramide",
con al vertice la homepage, e al di sotto le pagine sempre meno generali:
Tuttavia, come spiegano i ricercatori del Computer Graphics Lab di Stanford in un articolo che
affronta il problema, questo tipo di rappresentazione tridimensionale esaurirebbe presto lo spazio
disponibile, e non consentirebbe quindi di rappresentare i siti di maggiori dimensioni. Una possibile
soluzione al problema sarebbe quella di abbandonare lo spazio euclideo tradizionale, e di
"comprimere" l'immagine del web in una geometria iperbolica, ovvero non euclidea (v. spiegazione
sotto).
Uno spazio tridimensionale iperbolico utile a rappresentare la rete può essere raffigurato come
contenuto all'interno di una sfera (in un modello detto "proiettivo", o "di Klein") in cui gli oggetti
appaiono di proporzioni normali quando sono vicini al centro, e man mano che se ne allontanano
appaiono sempre più piccoli e più distorti. Vista dall'esterno, una mappa di Internet rappresentata
in spazio iperbolico ci apparirebbe così: