PROCESSI CASUALI
1
PROCESSI CASUALI
Segnali deterministici e casuali
Un segnale x(t) si dice DETERMINISTICO se è una funzione nota di t, cioè se, fissato
un qualunque istante di tempo to, il valore x(to) assunto dal segnale è noto con
esattezza a priori.
Tutti i segnali visti sino ad ora sono deterministici. Ad esempio i valori assunti dal
segnale x(t)=cos(2πt) sono noti con certezza per ogni valore di t
t
x(t)
…
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
…
… -0.809 -0.309 0.309 0.809 1 0.809 0.309 -0.309 -0.809 ...
Spesso il segnale non è rappresentabile (se non in forma approssimata) con una
semplice e comoda funzione matematica quale il coseno, ma se il suo valore è noto
in modo univoco ad ogni istante di tempo è comunque un segnale deterministico.
Un segnale x(t) si dice PROCESSO CASUALE se, fissato un qualunque istante di
tempo to, il valore x(to) assunto dal segnale è caratterizzabile solo in senso statistico,
cioè è una variabile casuale descritta dalla sua densità di probabilità.
Un esempio di processo casuale è il rumore presente in ogni dispositivo elettronico.
Questo tipo di segnale non è prevedibile a priori, il suo valore è noto con certezza
solo una volta che sia stato misurato.
2
PROCESSI CASUALI
Introduzione ai processi casuali (1)
Il rumore termico
Un classico e importante esempio utile a introdurre il concetto di processo casuale
è rappresentato dalla debole tensione elettrica v1(t) esistente ai capi di un resistore.
Questa tensione, variabile nel tempo, è causata dal movimento caotico degli
elettroni dovuto ad una temperatura del materiale superiore allo zero assoluto.
Se si registra la tensione v1(t) si ottiene (dopo aver effettuato la misura!) un segnale
che può essere considerato deterministico.
v1(t)
t
3
PROCESSI CASUALI
Introduzione ai processi casuali (2)
Se però si prende un secondo resistore identico al primo, posto alla stessa temperatura,
e si esegue la misura della tensione elettrica ai suoi capi, si ottiene un nuovo segnale
v2(t), con caratteristiche simili ma diverso dal precedente poiché gli elettroni si
muovono in modo diverso, ed indipendentemente, nei due resistori.
v2(t)
t
v1(t)
t
4
PROCESSI CASUALI
Introduzione ai processi casuali (3)
Se lo scopo è determinare l’effetto del rumore termico prodotto dal resistore su
un’apparecchiatura elettronica o un sistema di trasmissione, non è di alcuna utilità
aver visto l’andamento delle tensioni v1(t) o v2(t) ai capi dei due resistori se il
resistore effettivamente montato nell’apparecchiatura è un altro (o anche il primo, ma
in un tempo successivo: il rumore termico non si ripete in modo prevedibile!).
E’ utile invece riuscire a descrivere le caratteristiche della tensione di rumore comuni
a tutti i resistori dello stesso tipo e a quella temperatura.
In questo modo, qualsiasi sia il resistore (di quel valore e a quella temperatura)
montata nell’apparecchiatura, potremo dire, per esempio, con quale probabilità si
presenteranno certi valori di tensione o quale sarà la potenza di rumore.
Si abbandona dunque il concetto di certezza (proprio dei segnali deterministici) per
passare a quello dell’incertezza, descritto dalla teoria delle probabilità, proprio dei
processi casuali.
I valori del processo in generici istanti di tempo sono considerati variabili casuali, e
descritti come tali (attraverso le relative densità di probabilità).
5
PROCESSI CASUALI
Dimensione temporale e di insieme
Le tensioni elettriche esistenti ai capi di tutti i resistori dello stesso tipo e temperatura
costituiscono le realizzazioni del processo casuale rumore termico.
Dimensione
d’insieme
tempo
realizzazioni
Dimensione
temporale
x1 (t )
6
x2 (t )
....
xi (t )
....
xN (t )
PROCESSI CASUALI
Descrizione dei processi casuali
Di un processo casuale è utile conoscere le caratteristiche comuni a tutte le realizzazioni
Un processo casuale è descritto completamente dalle densità di probabilità congiunte di
tutti gli ordini e per tutti gli istanti di tempo. Tuttavia in molti casi questa informazione
completa non è disponibile. In pratica per descrivere il processo casuale x(t) si utilizzano
soprattutto:
la densità di probabilità delle ampiezze del processo px(a)
che descrive con quale probabilità una realizzazione del processo casuale x(t) assume un
valore uguale ad a. In generale px(a) dipende anche dal tempo. Tuttavia noi ci
occuperemo di una classe di processi casuali detti stazionari le cui caratteristiche
statistiche non dipendono dal tempo t .
la funzione di autocorrelazione del processo Rx(τ )
che descrive quantitativamente il legame tra il valore assunto da una realizzazione del
processo casuale al tempo t +τ e quello assunto dalla stessa realizzazione al tempo t .
Anche in questo caso, limitando l’analisi ai processi casuali stazionari, Rx(τ ) non dipende
dal tempo t ma solo dal ritardo τ tra le due misure.
7
PROCESSI CASUALI
Densità di probabilità del processo casuale (1)
Per un prefissato tempo t, il processo x(t) è una variabile casuale con densità di
probabilità px(a) (chiamata d.d.p. del processo casuale):
P(a < x(t ) ≤ a + da )
da →0
da
p x (a ) = lim
che ci dice con quale probabilità una qualsiasi realizzazione del processo assume valori in
un intorno infinitesimo di a. A partire dalla d.d.p. si possono definire:
+∞
µ x = E[ x(t )] = ∫ ap x (a )da
• Valore medio:
• Valore quadratico medio:
• Varianza:
[
[
2
∫
a p x (a )da
2
−∞
σ = E x(t ) − µ x
2
x
]
E x(t ) =
−∞
+∞
]= ∫ a − µ
+∞
2
2
x
[
]
p x (a )da = E x(t ) − µ x2
2
−∞
• La probabilità che una qualsiasi realizzazione assuma valori in un dato intervallo:
P[a1 < x(t ) ≤ a2 ] =
8
a2
∫ p (a )da
x
a1
PROCESSI CASUALI
Densità di probabilità del processo casuale (2)
I parametri che caratterizzano il processo casuale x(t) possono essere calcolati in modo
approssimato attraverso medie aritmetiche su un numero molto elevato di realizzazioni:
• Valore medio:
1
µx ≈
N
• Valore quadratico medio:
[
E x(t )
2
]
N
∑ x (t )
1
≈
N
• Varianza:
σ x2 ≈
1
N
i
i =1
N
N
∑ x (t )
i =1
N
2
∑ x j (t )
j =1
∑ x (t ) − N
1
i
i =1
2
i
L’indice i della sommatoria si riferisce a diverse realizzazioni
9
PROCESSI CASUALI
Densità di probabilità di un processo gaussiano
p (a )
1
p(a) =
⎛ (a − µ x )
exp⎜⎜ −
2σ x2
2πσ x2
⎝
2
1
2πσ x2
⎞
⎟
⎟
⎠
0 .606
2πσ x2
0 .135
2πσ
P (µ x − σ x < x ≤ µ x + σ x ) =
∫
µ x + 2σ x
∫
µ x − 2σ x
µ x + 3σ x
∫
µ x −3σ x
10
2σ X
µX
1
m x −σ x
P (µ x − 3σ x < x ≤ µ x + 3σ x ) =
2σ X
⎛ (a − µ x )2 ⎞
⎟ da ≈ 0.683
exp⎜⎜ −
2
⎟
σ
2
2π σ x2
x
⎝
⎠
m x +σ x
P (µ x − 2σ x < x ≤ µ x + 2σ x ) =
2
x
σX σX
⎛ (a − µ x )2 ⎞
⎟ da ≈ 0.954
exp⎜⎜ −
2
⎟
2
σ
2
2π σ x
x
⎝
⎠
1
⎛ (a − µ x )2 ⎞
⎟ da ≈ 0.997
exp⎜⎜ −
2
⎟
2
2
σ
2π σ x
x
⎝
⎠
1
PROCESSI CASUALI
a
Funzione Q e funzione errore complementare (erfc)
B = P(x > µ x + β )
p (a )
∞
2πσ
2
x
µx +β
σx σx
⎛ β ⎞
⎛β ⎞ 1
⎟
= Q⎜⎜ ⎟⎟ = erfc⎜⎜
⎟
σ
2
2
σ
⎝ x⎠
x ⎠
⎝
B
C=B
µX
β
t
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,45
0,50
0,60
∫
=
0 .606
Q(t)
5,000E-01
4,801E-01
4,602E-01
4,404E-01
4,207E-01
4,013E-01
3,821E-01
3,622E-01
3,446E-01
3,264E-01
3,085E-01
2,743E-01
t
0,8
1,0
1,2
1,4
1,6
1,8
2,0
2,4
2,8
3,2
3,6
4,0
⎛ (a − µ x )2 ⎞
⎟ da
exp⎜⎜ −
2
⎟
2
2
σ
2πσ x
x
⎝
⎠
1
β
a
Q(t)
2,119E-01
1,587E-01
1,151E-01
8,080E-02
3,806E-01
3,590E-02
2,280E-02
8,200E-03
2,600E-03
6,871E-04
1,591E-04
3,167E-05
s
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
1,0
1,2
1,4
erfc(s)
1,000E+00
8,875E-01
7,730E-01
6,714E-01
5,716E-01
4,795E-01
3,961E-01
3,222E-01
2,579E-01
1,573E-01
9,700E-02
4,770E-02
s
1,6
1,8
2,0
2,2
2,4
2,6
2,8
3,0
3,3
3,7
4,0
5,0
erfc(s)
2,370E-02
1,090E-02
4,700E-03
1,900E-03
6,885E-04
2,360E-04
7,502E-05
2,209E-05
3,057E-06
1,671E-07
1,542E-08
1,537E-12
per t > 3 Q(t ) ≈
(
exp − t 2 / 2
2π t
( )
exp − s 2
per s > 2 erfc( s ) ≈
πs
11
PROCESSI CASUALI
Processi casuali stazionari con valor medio non nullo
Un processo casuale con valor medio diverso da zero può essere rappresentato come
la somma di un processo a valor medio nullo e di una costante (segnale
deterministico) uguale al valor medio.
Una realizzazione di
x(t) ed y(t)
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
-0.8
-40
yi(t)
xi(t)
-20
0
tempo
12
Le d.d.p delle ampiezze di
x(t) ed y(t)
y(t) = x(t) + 0.5
20
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
40 -0.8
d.d.p.
0
)
0.05
0.1PROCESSI0.15
0.2
CASUALI
Autocorrelazione dei processi casuali stazionari (1)
L’autocorrelazione del processo x(t) è definita come valor medio di x*(t)x(t+τ).
Se il processo è stazionario l’autocorrelazione non dipende da t, ma solo da τ.
[
Rx (τ ) = E x * (t ) x (t + τ )
]
Per τ =0 si ottiene
Rx (0) = E[| x (t ) |2 ]
L’autocorrelazione è interpretabile come media aritmetica, su un gran numero
di realizzazioni, dei prodotti dei valori del processo agli istanti t e t+τ.
1
Rx (τ ) ≈
N
N
∑ x (t ) x (t + τ )
i =1
*
i
i
L’indice i della sommatoria si riferisce a diverse realizzazioni
13
PROCESSI CASUALI
Autocorrelazione dei processi casuali stazionari (2)
Consideriamo per esempio due processi casuali stazionari a valor medio nullo, ma con
caratteristiche differenti. Il primo ha realizzazioni che variano lentamente nel tempo (ad
es. il rumore di un motore di un’auto al minimo), mentre il secondo ha realizzazioni che
variano con grande rapidità (ad es. Il fruscio di fondo di un disco rovinato) ...
[
Rx (τ ) = E x * (t ) x (t + τ )
µx = 0
]
[
]
Rx (0 ) = E | x (t ) |2 = σ x2
τ
x(t)
x(t+τ)
x(t)
2
2
1
1
0
0
-1
-1
-2
-2
0
14
τ
50
100
150
200
0
50
100
150
x(t+τ)
200
PROCESSI CASUALI
Autocorrelazione dei processi casuali stazionari (3)
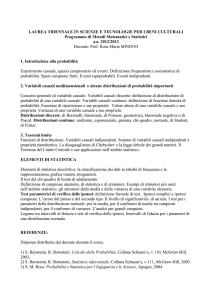
Alcune realizzazioni di un
processo che varia lentamente
Se x(t) varia lentamente nel
tempo, x(t+τ ) è solitamente
poco diverso da x(t): il
prodotto xi(t)xi(t+τ ) ha segno
positivo per quasi tutte le
realizzazioni.
Per τ=0 l’autocorrelazione Rx(0)
è la varianza del processo; per
τ>0 l’autocorrelazione Rx(τ) è
sempre minore di Rx(0).
Rx (τ ) ≈
1
N
N
∑ x (t )x (t + τ ) > 0
i =1
i
i
2
0
-2
0
50
100
150
200
0
50
100
150
200
0
50
100
150
200
0
50
100
150
200
0
50
100
150
200
2
0
-2
2
0
-2
2
0
-2
2
0
-2
valore elevato!
x(t)
15
τ
x(t+τ )
PROCESSI CASUALI
L’autocorrelazione dei processi casuali stazionari (4)
Alcune realizzazioni di un
processo che varia rapidamente
Se x(t) varia rapidamente nel
tempo , x(t+τ ) è spesso molto
diverso da x(t): il prodotto
xi(t)xi(t+τ ) ha segno casuale
nelle varie realizzazioni e
quindi l’autocorrelazione ha un
valore prossimo a zero.
1
Rx (τ ) ≈
N
16
N
∑ x (t )x (t + τ ) ≈ 0
i =1
i
i
2
0
-2
0
50
100
150
200
0
50
100
150
200
0
50
100
150
200
0
50
100
150
200
0
50
100
2
0
-2
2
0
-2
2
0
-2
2
0
-2
τ
x(t)
x(t+τ )
150
PROCESSI CASUALI
200
Esempio di valutazione dell’autocorrelazione (1)
xi* (t ) xi (t + τ )
0.5
0.5
0.5
0
0
0
-0.5
τ =0
-0.5
i =1
τ =0.2
-0.5
i =100
0.5
0.5
0.5
0
0
0
-0.5
τ =0.6
-0.5
τ =0.8
-0.5
0.5
0.5
0.5
0
0
0
-0.5
τ =0.4
τ =1.2
-0.5
τ =1.4
-0.5
17
τ =1
τ =1.6
PROCESSI CASUALI
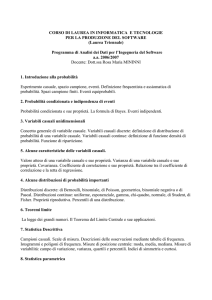
Esempio di valutazione dell’autocorrelazione(2)
Rx (τ ) = E[ x* (t ) x (t + τ )]
1
Risultato del calcolo
0.8
0.6
0.4
0.2
0
τ
-0.2
-0.4
-4
18
-2
0
2
Nota: è evidente, dalla
definizione di
autocorrelazione, che per
qualsiasi processo casuale
stazionario Rx(τ) è una
funzione pari, cioè
Rx(-τ)=Rx(τ)
4
PROCESSI CASUALI
Proprietà dell’autocorrelazione
1. L’autocorrelazione in τ=0 coincide con la potenza media del processo casuale.
[
]
Rx (0 ) = E x (t ) = E [Px ] = P ≈
2
1
N
N
∑ x (t )
i =1
2
i
2. Rx(0 ) è il massimo valore che può assumere l’autocorrelazione.
Rx (τ ) ≤ Rx (0)
3. Rx(τ) è inoltre una funzione pari
Rx (τ ) = Rx (−τ )
4. Dato un processo y(t) con media µy possiamo scrivere y(t)=x(t)-µy, ove x(t) è un
processo a media 0. Vale la seguente relazione
R y (τ ) = Rx (τ ) + µ y2
19
PROCESSI CASUALI
Autocovarianza dei processi casuali stazionari
[
C x (τ ) = E ( x (t ) - µ x )
*
(x(t + τ ) - µx ) ] = Rx (τ ) − µ x 2
Per un processo a valor medio nullo, l’autocovarianza coincide con
l’autocorrelazione
[
]
C x (0 ) = E | x (t ) - µ x |2 = Rx (0 ) − µ x = σ x2
20
2
PROCESSI CASUALI
Il coefficiente di correlazione (1)
Dato un processo casuale, si definisce coefficiente di correlazione del
processo, l’autocovarianza normalizzata:
[
]
C (τ ) E (x(t) −µx ) (x(t +τ) −µx ) Cx(τ )
= 2
ρx (τ) = x =
2
Cx(0)
E | x(t) −µx |
σx
ρ x (τ ) =
*
[
C x (τ )
≤1
C x (0)
]
ρ x (0) = 1
21
PROCESSI CASUALI
Il coefficiente di correlazione (2)
Il coefficiente di correlazione del processo è una funzione i cui valori sono
limitati tra -1 e +1. Ovviamente il suo valore in τ=0 è unitario e, salvo casi
molto particolari, è l’unico massimo.
Il valore del coefficiente di correlazione in funzione di τ è una misura della
predicibilità di una realizzazione del processo all’istante t+τ noto il valore
della realizzazione all’istante t.
••Se
(τ)=±1:x(t)
x(t)eex(t+
x(t+ττ))sisidicono
diconocompletamente
completamentecorrelati,
correlati,c’è
c’èun
unlegame
legame
Seρρxx(τ)=±1:
deterministico
fra
i
due
campioni
e
quindi
è
possibile
predire
deterministico fra i due campioni e quindi è possibile predire
perfettamente
perfettamenteililvalore
valoredell’uno
dell’unonoto
notoililvalore
valoredell’altro.
dell’altro.
••Se
ρ
(τ)=0
[cioè
se
C
(τ)=0]:
x(t)
e
x(t+
τ
)
sono
Se ρxx(τ)=0 [cioè se Cxx(τ)=0]: x(t) e x(t+τ) sono incorrelati,
incorrelati, non
non èè possibile
possibile
predire
il
valore
dell’uno
noto
il
valore
dell’altro.
predire il valore dell’uno noto il valore dell’altro.
22
PROCESSI CASUALI
Una semplice dimostrazione del legame
correlazione/predicibilità
Consideriamo il processo casuale stazionario a valor medio nullo x(t). Indichiamo per
brevità con x1 e x2 le due variabili casuali x(t1) e x(t2) e per semplicità assumiamo x1 e x2
reali. Dimostreremo che:
1 - quanto più due variabili casuali x1 e x2 (a valor medio nullo) sono correlate, tanto
meglio possiamo stimare dall’una il valore dell’altra.
2 - la stima sarà la migliore possibile, se l’errore di stima è incorrelato con i dati.
Dire che la variabile casuale x2 è correlata con la variabile casuale x1 equivale a dire
che il valore assunto da x2 è in parte proporzionale a quello assunto da x1 più una
variabile casuale indipendente da x1 e quindi non predicibile. In breve:
x2 = rx1 + n
dove n è una variabile casuale indipendente da x1, a valore medio nullo e varianza
σ n2 = E[n 2 ]
23
PROCESSI CASUALI
La stazionarietà del processo ci dice che la varianza σ2 delle due variabili casuali x1 e x2 è
la medesima, imponendo un legame tra la varianza di n e il coefficiente r.
In formule abbiamo:
[ ] [ ]
⇒ E [x ] = E [(rx + n ) ] = σ
r E [x ]+ E [n ]+ 2r E [x n] = σ
⇒ r σ + E [n ] = σ
123
E x12 = E x22 = σ 2
2
2
1
2
2
2
2
2
1
2
2
2
2
2
1
=0
da cui:
perchè indipendenti
σ n2 = (1 − r 2 )σ 2
Piu’ |r| è prossimo a 1, piu’ σn2 è piccolo e tanto meno x1 si discosta da x2.
Si può dimostrare che il coefficiente di correlazione fra x1 e x2 è uguale a r:
ρ x (τ ) = E [x1 x2 ] / E [x12 ] = r
Infatti:
[ ]
E [x1 x2 ] = E [x1 (rx1 + n )] = rE x12
Piu’ il coefficiente di correlazione è in modulo prossimo a 1, piu’ x2 è predicibile da x1.
24
PROCESSI CASUALI
Stima lineare di x2 da x1 (predire il futuro)
Conoscendo il valore assunto da x1, cerchiamo di predire al meglio (stimare) il
valore che assumerà x2 cercando il coefficiente di proporzionalità a
xˆ 2 = ax1
Il valore ottimo di a si ha se la differenza (in media quadratica) tra il valore
stimato e il valore effettivamente assunto da x2 è minima, cioè se è minimo
[
]
[
)
E ( x2 − x2 ) 2 = E ( x2 − ax1 ) 2
]
Derivando rispetto ad a e uguagliando a zero si ottiene il valore ottimo di a
[ ]
a = E [x1 x2 ] / E x12 = r
Il valore ottimo di a coincide, ovviamente, con il coefficiente r, infatti:
[ ]
E [x1 x2 ] = E [x1 (rx1 + n )] = rE x12
25
PROCESSI CASUALI
Come si fa a predire il futuro?
IlIlvalore
valoreottimo
ottimodidiaacoincide
coincidecon
conrrche
cheèèililcoefficiente
coefficientedidicorrelazione
correlazionedelle
delle
e
x
variabili
casuali
x
variabili casuali x1 e x2
1
2
[ ]
a = E [x1 x2 ] / E x12 = ρ x (τ )
Questa considerazione ci consente di definire una procedura per stimare al
meglio il valore che assumerà x2 una volta noto il valore assunto da x1
1a fase: apprendimento - Analizzando N (numero grande) realizzazioni del
processo casuale, si calcola il coefficiente di correlazione (ricordare che µx=0)
E [x (t ) x (t + τ )] N
ρ x (τ ) =
≈ ∑ xi (t )xi (t + τ )
E[ x 2 (t )]
i =1
N
∑ x (t )
i =1
2
i
2a fase: predizione - Si stima x(t+τ ) da x(t)
xˆ (t + τ ) = ρ x (τ ) x (t )
26
PROCESSI CASUALI
L’errore di stima
Si nota che l’errore di stima, essendo causato solo dalla variabile casuale n, ha
valore quadratico medio pari a quello di n
[
]
[
]
)
E ( x2 − x2 ) 2 = E ( x2 − ax1 ) 2 = σ x2 (1 − r 2 )
Da questa espressione si capisce subito che:
1 - l’errore di stima è nullo se le variabili casuali sono totalmente correlate (|r|=1)
2 - l’errore di stima è massimo se le variabili casuali sono incorrelate (|r|=0)
Infine, è importante notare che l’errore di stima è incorrelato con il dato (x1),
infatti:
[
]
= E [x x ] − aE [x ] = rE [x ] − rE [x ] = 0
E [x1 ( x2 − ax1 )] = E x1 x2 − ax12 =
1 2
2
1
2
1
2
1
27
PROCESSI CASUALI
Valor medio e autocorrelazione temporale
Si abbia un processo casuale stazionario x(t) di cui si conosce una sua realizzazione
limitata nel tempo da –T/2 a T/2 che indichiamo con xT(t)
Valor medio temporale
1
η x = lim
T →∞ T
T /2
∫x
T
( t ) dt
−T / 2
Autocorrelazione temporale
1
ℜ x (τ ) = lim
T →∞ T
T /2
∫x
*
T
( t ) x T ( t + τ ) dt
−T / 2
1
ℜ x ( 0 ) = lim
T →∞ T
T /2
∫| x
T
( t ) |2 dt = Px
−T / 2
Per un processo stazionario
E [η x ] = µ x
E [ℜ x (τ )] = R x (τ )
E [ℜ x ( 0 )] = E [ Px ] = R x ( 0 ) = P = potenza del processo
28
PROCESSI CASUALI
Processi casuali ergodici
Tra i processi casuali stazionari esistono alcuni processi per i quali si possono ricavare
la densità di probabilità e la funzione di autocorrelazione da una sola realizzazione.
Questi processi sono detti ERGODICI.
Nota importante:
Per un processo
ergodico tutte le
realizzazioni hanno
la medesima
potenza.
tempo
realizzazioni
Osservare tutte le realizzazioni ad un istante di tempo (o per una coppia di istanti)
permette di ricavare le stesse informazioni statistiche ottenibili dall’osservazione
prolungata nel tempo di una singola realizzazione.
Un esempio di processo ERGODICO è rappresentato dal rumore termico.
29
PROCESSI CASUALI
Processi casuali ergodici (d.d.p. ampiezze)
La
Ladensità
densitàdidiprobabilità
probabilitàdei
deivalori
valoriassunti
assuntida
daun
unprocesso
processocasuale
casualeergodico
ergodicopuò
può
essere
esserevalutata,
valutata,oltre
oltreche
chedall’insieme
dall’insiemedelle
dellerealizzazioni
realizzazioni(ad
(adun
unsolo
soloistante
istantediditempo,
tempo,
arbitrario,
anche
da
una
sola
realizzazione,
come
percentuale
del
tempo
in
cui
il
arbitrario, anche da una sola realizzazione, come percentuale del tempo in cui il
processo
processoassume
assumeampiezze
ampiezzefra
fraaaeea+da
a+dadiviso
divisoper
perl’ampiezza
l’ampiezzadell’intervallo
dell’intervalloda.
da.
Realizzazione del processo casuale
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
-0.8
-40
30
-20
0 tempo 20
40
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
-0.8
0
0.05
0.1
PROCESSI CASUALI
0.15
Processi casuali ergodici
Il valor medio temporale coincide col valor medio di insieme (processo ergodico per la
media).
L’autocorrelazione temporale coincide con l’autocorrelazione di insieme (processo
ergodico per l’autocorrelazione).
T /2
1
η x = lim
T →∞ T
1
ℜ x (τ ) = lim
T →∞ T
∫x
( t ) dt = µ x
−T / 2
T /2
∫x
T
*
T
( t ) x T ( t + τ ) dt = R x (τ )
−T / 2
31
PROCESSI CASUALI
Densità spettrale di potenza (1)
La densità spettrale di potenza di un processo casuale stazionario x(t) è definita
come la trasformata di Fourier dell’autocorrelazione Rx(τ )
∞
Sx ( f ) =
∫ R (τ ) exp{− j 2πfτ }dτ
Rx (τ ) =
x
−∞
∞
∫ S ( f ) exp{ j 2πfτ }df
x
−∞
Perchè la Sx(f) è una densità spettrale di potenza?
1 - Come si è visto l’autocorrelazione in τ=0, per un processo stazionario,
rappresenta la potenza del processo stesso
Rx (0) = E[ℜ x (0)] = E[ Px ] = P
2 - L’autocorrelazione in τ=0 è uguale all’integrale della sua TDF (th. valore origine):
∞
R x ( 0) =
∫ S ( f ) df
x
=P
−∞
La densità spettrale di potenza per un processo casuale x(t) rappresenta quindi
come è distribuita, statisticamente, la potenza alle varie frequenze.
32
PROCESSI CASUALI
Densità spettrale di potenza (2)
Dato un processo y(t) con media µy possiamo scrivere:
y (t ) = x (t ) − µ y
Ove x(t) è un processo a media 0.
Valgono le seguenti relazioni
R y (τ ) = Rx (τ ) + µ y
2
S y (τ ) = S x (τ ) + µ y δ ( f )
2
Un processo stazionario, con media diversa da 0, ha una densità spettrale di potenza
con un impulso nell’origine di area pari al quadrato della media.
Viceversa un processo con media 0 ha una densità spettrale di potenza senza impulsi
per f=0.
33
PROCESSI CASUALI
Densità spettrale di potenza (significato fisico)
Si supponga che il processo casuale y(t) sia ottenuto da x(t) attraverso un filtro ideale
passa banda centrato sulla frequenza f0 (e, simmetricamente, -f0) con piccola banda ∆f. Si
può ben dire che y(t) contiene le sole frequenze di x(t) nella banda del filtro, cioè in un
intorno di ±fo. Se ∆f è sufficientemente piccolo si ha
Sy ( f ) = Sx ( f0 )
per
f0 − ∆f / 2 < f < f0 + ∆f / 2
e simmetricamente intorno a -f0. La potenza di y(t), cioè la potenza di x(t) nelle bande ∆f ,
è data da
+∞
P=
∫S
y
( f ) df = 2S x ( f 0 ) ∆ f
−∞
Dunque Sx(f0) ha effettivamente il significato di potenza per unità di banda in un intorno di
f0, cioè di densità spettrale di potenza. Nota: l’aggettivo “spettrale” viene usato per
indicare tutto ciò che si riferisce al “dominio” delle frequenze. Si noti che metà della
potenza è attribuita alle frequenze negative! Poiché ciò ha poco senso fisico, spesso si
preferisce definire una densità spettrale unilatera (doppia della “bilatera”; è ovvio che poi
nei calcoli si considerano le sole frequenze positive!)
IMPORTANTE: la densità spettrale di potenza non può essere negativa (a nessuna
frequenza, filtrando, si otterrebbe un processo y(t) con potenza negativa!!)
34
PROCESSI CASUALI
Processi casuali attraverso sistemi LTI (1)
Se un processo casuale x(t) stazionario passa attraverso un sistema lineare tempoinvariante con risposta all’impulso h(t) e risposta in frequenza H(f), il processo casuale in
uscita y(t) è stazionario ed ha le seguenti caratteristiche:
1. In generale la densità di probabilità del processo in uscita y(t) è diversa da quella di
x(t). Solo la densità di probabilità Gaussiana rimane tale nel passaggio del processo
casuale attraverso il sistema LTI: cambiano solo valor medio e varianza.
2. Il valor medio del processo in uscita è legato a quello d’ingresso dalla seguente
relazione:
µ y = µ x ⋅ H ( 0)
3. L’autocorrelazione del processo d’uscita è legata a quella d’ingresso dalla seguente
relazione:
R y (τ ) = Rx (τ ) ∗ h (τ ) ∗ h (− τ )
4. La densità spettrale di potenza del processo in uscita è legata a quella d’ingresso dalla
seguente relazione:
S y ( f ) = Sx ( f ) ⋅ H ( f )
2
35
PROCESSI CASUALI
Processi casuali attraverso sistemi LTI (2)
5. La potenza del processo in uscita dipende dalla densità spettrale di potenza del
processo d’ingresso e dalla risposta in frequenza del sistema LTI secondo la relazione
∞
Py = ∫ S y ( f )df =
−∞
∞
∫ S x ( f ) ⋅ H ( f ) df
2
−∞
6. La varianza del processo in uscita dipende dalla densità spettrale di potenza e dal valor
medio del processo d’ingresso e dalla risposta in frequenza del sistema LTI:
∞
∞
σ = Py − µ y = ∫ S y ( f )df − µ y = ∫ S x ( f ) ⋅ H ( f ) df − µ x H (0 )
2
y
2
−∞
36
2
2
2
−∞
PROCESSI CASUALI
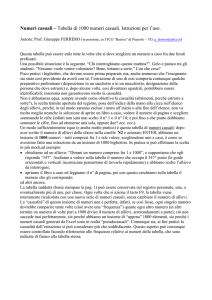
2
Processi casuali bianchi (1)
Si definisce bianco (a valor medio nullo) un processo casuale stazionario con densità
spettrale di potenza costante.
Quindi un processo casuale bianco (a valor medio nullo) ha autocorrelazione
impulsiva.
ATTENZIONE: questa caratteristica è indipendente dalla densità di probabilità delle
ampiezze che può essere di tipo qualsiasi (ad es. Gaussiana, uniforme …)
Si tratta, evidentemente, di una idealizzazione (anche la luce che diciamo “bianca”, da cui
deriva il nome, ha spettro che non si estende all’infinito). Notiamo che un processo
veramente bianco avrebbe potenza infinita!
Nel mondo reale osserviamo solo processi filtrati (con banda più o meno larga). Se la
banda del processo in ingresso è più larga di quella del filtro, possiamo assegnare valori
arbitrari alla densità spettrale fuori banda (senza che cambino i risultati del calcolo). Un
valore costante è il più comodo dal punto di vista matematico.
37
PROCESSI CASUALI
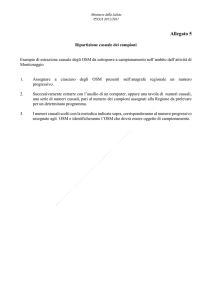
Processi casuali bianchi (2)
x(t)
2
Rx(τ)
0
Sx(f)
N0/2
-2
0
100
τ
px(a)
-5
0
N0/2
f
5
Nota: autocorrelazione impulsiva significa che il valore x(t+τ) del processo bianco al
tempo t+τ è assolutamente impredicibile dal valore x(t) all’istante t : il processo varia in
modo infinitamente rapido!
Se il processo bianco ha valor medio µx diverso da zero, si ha Sx(f)=(N0/2)+|µx|2 δ(f) e
Rx(τ)= (N0/2)δ(τ)+|µx|2
38
PROCESSI CASUALI
Processi casuali bianchi (3)
Solitamente la densità spettrale (bilatera) di un processo casuale x(t) bianco viene indicata
con Sx(f)=N0/2 e quindi la funzione di autocorrelazione con Rx(τ)= N0/2 δ(τ)
Nota: si indica quindi con N0 la densità spettrale di potenza unilatera.
E’ importante saper calcolare la potenza di un processo y(t) ottenuto da un processo bianco
x(t) attraverso un filtro con risposta all’impulso h(t) e risposta in frequenza H(f). Si ha
+∞
+∞
σ = ∫ S y ( f )df = ∫ Sx ( f ) H ( f ) df =
2
2
y
−∞
−∞
+∞
+∞
N
N
2
= 0 ∫ Sx ( f ) H ( f ) df = 0 ∫ h2 (t )dt
2 −∞
2 −∞
39
PROCESSI CASUALI
Correlazione tra uscita e ingresso di un sistema LTI
La correlazione tra due processi casuali ergodici y(t) e x(t) è definita nel modo seguente:
ℜ
yx
1
(τ ) = Tlim
→∞ T
T /2
∫
y * ( t ) x ( t + τ )dt = R yx (τ
)
−T / 2
Se i due processi casuali y(t) e x(t) sono rispettivamente l’uscita e l’ingresso di un sistema
LTI la loro correlazione è uguale alla convoluzione tra l’autocorrelazione dell’ingresso e la
risposta all’impulso del sistema LTI:
R yx (τ ) = R x (τ ) ∗ h (τ
)
Si nota che se il processo d’ingresso è bianco (autocorrelazione impulsiva), la correlazione
tra uscita e ingresso coincide con la risposta all’impulso del sistema.
R yx (τ ) = δ (τ ) ∗ h (τ ) = h (τ
)
Questa proprietà è spesso utilizzata nei sistemi di telecomunicazione per stimare la
risposta impulsiva del canale di trasmissione che è ignoto a priori.
40
PROCESSI CASUALI
Correlazione tra uscita e ingresso bianco
x(t)
Processo bianco
y(t)
?
h(t)
Processo correlato
h(τ)
ℜ
yx
1
(τ ) = Tlim
→∞ T
T /2
∫
y * ( t ) x ( t + τ )dt
=
−T / 2
41
se Sx(f)=1 e
quindi Rx(τ)=δ(τ)
PROCESSI CASUALI
Un esempio importante di processo bianco (1)
Si consideri il processo x(t) le cui realizzazioni sono costituite da treni di impulsi equispaziati
a passo T, con ritardo iniziale τ casuale e area a casuale indipendente da impulso a impulso
con valor medio nullo e varianza σ 2.
x(t ) =
∞
∑ a δ (t − nT − τ )
n = −∞
n
x1(t)
T
τ
t
x2(t)
T
42
τ
t
PROCESSI CASUALI
Un esempio importante di processo bianco (2)
Si può dimostrare che il processo casuale x(t) è STAZIONARIO ed ERGODICO,
con le seguenti proprietà
1. Il valor medio è nullo: µx = 0
2. La varianza è: σ 2 / T
3. L’autocorrelazione è impulsiva (processo bianco): Rx (τ ) = (σ 2 / T ) δ (τ )
4. La densità spettrale di potenza è costante (processo bianco): Sx (τ ) = (σ 2 / T )
43
PROCESSI CASUALI
Se il processo casuale x(t) passa attraverso un sistema LTI con risposta in frequenza
H(f) e risposta all’impulso h(t), in uscita si ottiene un processo y(t) con:
Densità spettrale di potenza: Sy (f ) = (σ 2 / T) |H(f)|2
h(t)
y1(t)
T
H(f)
Sx (f)
f
44
τ
t
Sy (f)
f
f
PROCESSI CASUALI
Il processo casuale y(t) costruito nel modo indicato precedentemente può essere
usato per rappresentare (nel tempo) una sequenza casuale di bit. Ciascuno di essi
sarà codificato, ad esempio, con un impulso rettangolare, di base T, ed ampiezza:
+A (“1”) o -A (“0”):
A
y1(t)
h(t)
+1
+1
T
-1
+1
+1
-1
τ
-1
t
T
1/T
Sx (f)
f
Sx ( f ) = 1 / T
45
|H(f)|2
(AT)2
A2T
Sy (f)
f
h(t ) = A ⋅ rect (t / T )
H ( f ) = AT ⋅ sinc(Tf )
f
S y ( f ) = A2T ⋅ sinc2 (Tf )
PROCESSI CASUALI