Corso di Relatività: prima parte
Prof. L. Vanzo1
Dipartimento di Fisica, Università di Trento
9 maggio 2013
1 [email protected]
Sommario
Negli ultimi decenni dell’ottocento si pensava alle onde elettromagnetiche come a perturbazioni di un etere immobile, dotato anche di proprietà meccaniche. Questo pose per le
discipline fisiche quello che era, forse, il principale problema scientifico dell’epoca: dimostrare sperimentalmente l’esistenza dell’etere e determinarne le proprietà meccaniche ed
elettromagnetiche. Tuttavia, e in parte sorprendentemente1 , nessuno dei vari esperimenti
tentati riuscı́ mai in quell’intento. Oggi si può dire che quegli esperimenti misero in luce
essenzialmente i limiti dei concetti di spazio e tempo della fisica classica newtoniana, e la
necessità di una loro revisione2 .
Come tutti sanno, la forma definitiva di questa revisione è opera di A. Einstein e forma la base concettuale della teoria della relatività ristretta, o speciale. Questa teoria è
basata sull’osservazione che in mancanza di segnali che si propagano immediatamente,
non è possibile confrontare il tempo di eventi distanti se prima non si adotta una convenzione per sincronizzare (o regolare) gli orologi. Si vedrà che ciò ha condotto Einstein
a un nuovo concetto di tempo. Questo argomento e le sue conseguenze nei campi della
meccanica e dell’elettrodinamica formano il corpo principale del corso di relatività. La
meccanica dei fluidi, la statistica e la termodinamica relativistica saranno considerate solo
marginalmente.
L’estensione del principio di relatività ai sistemi di riferimento accelerati, considerata
da Einstein come epistemologicamente necessaria, condusse a una seconda, e più radicale, revisione dei concetti di spazio e tempo. L’osservazione (sempre di Einstein) che
una trasformazione arbitraria delle coordinate spazio-temporali è indistinguibile da un
cambiamento del campo gravitazionale è il fondamento della sua teoria relativistica della
gravitazione, la relatività generale che è alla base della recente, intensa attività di ricerche
nel campo cosmologico, e che sarà introdotta nella seconda parte di questo corso.
I seguenti appunti raccolgono una sintesi dei temi trattati a lezione, e non devono in alcun
modo essere considerati un sostituto dei testi. Per i necessari approfondimenti si rimanda
allo studio dei libri indicati nella bibliografia.
1
La necessità dell’etere era sostenuta da alcuni fra i migliori scienziati dell’epoca.
In appendice D sono citati i testi di W. Pauli, di C. Møller e di Panofski e Phillips, dove si trova una
introduzione storica dettagliata al periodo pre-relativistico.
2
Indice
1 Simmetrie non relativistiche
1.1 Considerazioni generali . . . . . . . . . . . . . . . . . . .
1.2 Sistemi di riferimento e coordinate . . . . . . . . . . . .
1.3 Il gruppo di Galilei . . . . . . . . . . . . . . . . . . . . .
1.3.1 Sistemi inerziali . . . . . . . . . . . . . . . . . . .
1.3.2 Trasformazioni di Galilei . . . . . . . . . . . . . .
1.3.3 Struttura di gruppo . . . . . . . . . . . . . . . . .
1.4 Relatività e meccanica . . . . . . . . . . . . . . . . . . .
1.4.1 L’addizione delle velocità . . . . . . . . . . . . . .
1.4.2 Equazioni del moto di Newton . . . . . . . . . . .
1.4.3 Sistemi continui: il fluido perfetto e la conduzione
1.4.4 L’equazione di Schrödinger . . . . . . . . . . . . .
1.4.5 Il principio di relatività galileiano . . . . . . . . .
1.5 Ottica non relativistica . . . . . . . . . . . . . . . . . . .
1.5.1 onde piane e velocità di fase . . . . . . . . . . . .
1.5.2 la velocità di gruppo . . . . . . . . . . . . . . . .
1.5.3 La velocità della luce nei dielettrici trasparenti . .
1.5.4 L’aberrazione e l’effetto Doppler . . . . . . . . . .
1.6 Esperienze di fine secolo XIX . . . . . . . . . . . . . . .
1.6.1 Hoek . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.2 Fizeau e Fresnel . . . . . . . . . . . . . . . . . . .
1.6.3 Michelson e Morley . . . . . . . . . . . . . . . . .
1.6.4 Interpretazioni . . . . . . . . . . . . . . . . . . .
1.7 Esperienze moderne . . . . . . . . . . . . . . . . . . . . .
. .
. .
. .
. .
. .
. .
. .
. .
. .
del
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
calore
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
5
5
6
7
8
8
9
10
12
14
14
15
16
17
19
20
21
22
22
23
25
2 Le basi della relatività speciale
2.1 Gli assiomi di Einstein . . . . . . . . . . . . . . . .
2.1.1 Osservazioni sui postulati . . . . . . . . . .
2.1.2 La definizione del tempo . . . . . . . . . . .
2.2 Le trasformazioni di Lorentz . . . . . . . . . . . . .
2.2.1 Condizioni sulle trasformazioni . . . . . . .
2.2.2 Trasformazioni di Lorentz speciali, o boosts
2.2.3 La più generale trasformazione di Lorentz .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
26
26
27
28
30
30
32
36
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2.3
2.4
2.5
Lunghezze e intervalli di tempo . . . . . . . . . . . . . .
L’addizione delle velocità . . . . . . . . . . . . . . . . . .
La luce nei dielettrici trasparenti . . . . . . . . . . . . .
2.5.1 Effetto Doppler e aberrazione secondo la relatività
2.5.2 Onde di materia . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
37
39
41
42
42
3 Formalismo quadridimensionale ed equazioni invarianti
3.1 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Gruppo di Lorentz . . . . . . . . . . . . . . . . . . . . . .
3.3 Tensori e campi di tensori . . . . . . . . . . . . . . . . . .
3.3.1 tensori algebrici . . . . . . . . . . . . . . . . . . . .
3.3.2 campi tensoriali . . . . . . . . . . . . . . . . . . . .
3.4 Equazioni invarianti . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Equazione di Klein-gordon . . . . . . . . . . . . . .
3.4.2 Equazione di Proca . . . . . . . . . . . . . . . . . .
3.5 Il tempo proprio . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Il cono luce e le relazioni causali . . . . . . . . . . . . . . .
3.7 Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
44
44
45
46
46
48
49
49
50
51
51
52
4 Meccanica relativistica
4.1 quantità di moto, energia e forza . . . . . .
4.2 formule di trasformazione . . . . . . . . . .
4.3 sistemi di particelle . . . . . . . . . . . . . .
4.4 Equazioni del moto . . . . . . . . . . . . . .
4.5 Moto uniformemente accelerato, o iperbolico
4.6 Il razzo relativistico . . . . . . . . . . . . . .
4.7 E = mc2 . . . . . . . . . . . . . . . . . . . .
4.8 Collisioni . . . . . . . . . . . . . . . . . . . .
4.8.1 L’effetto Compton . . . . . . . . . .
4.8.2 Energia di soglia . . . . . . . . . . .
4.8.3 Decadimento . . . . . . . . . . . . .
4.9 Moto dello spin e precessione di Thomas . .
4.10 Principio variazionale . . . . . . . . . . . . .
4.11 Momento angolare . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
54
54
55
56
57
58
59
62
64
64
66
68
69
71
73
5 Elettrodinamica covariante
5.1 Forma covariante delle equazioni . . .
5.2 Corrente elettrica . . . . . . . . . . .
5.3 Trasformazione dei campi . . . . . .
5.4 Elettrodinamica fenomenologica . . .
5.5 Campo di una carica in moto rapido
5.6 L’equazione di Lorentz-Dirac . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
74
74
75
78
79
81
85
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Principi variazionali
6.1 Equazioni di Eulero e Lagrange . . .
6.2 Azione per il campo elettromagnetico
6.3 Azione per le particelle . . . . . . . .
6.4 Il tensore energia-impulso . . . . . .
6.4.1 Caso generale . . . . . . . . .
6.4.2 Campo scalare . . . . . . . .
6.4.3 Campo elettromagnetico . . .
6.4.4 Fluido perfetto . . . . . . . .
6.4.5 Particelle libere . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
88
89
90
92
93
93
95
96
97
100
7 Teoria della gravitazione
7.1 Il principio di equivalenza . . . . . .
7.2 Metrica e gravitazione . . . . . . . .
7.2.1 Moto di una particella . . . .
7.2.2 Distanze spaziali e intervalli di
. . . .
. . . .
. . . .
tempo
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
102
102
105
107
110
8 Appendici
A
Invarianza della fase
B
La delta di Dirac . .
C
Testi di Riferimento .
D
Argomeni da studiare
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
113
113
113
116
117
. . . . . . .
. . . . . . .
. . . . . . .
per l’esame
.
.
.
.
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Capitolo 1
Simmetrie non relativistiche
Dal punto di vista di un fisico moderno una teoria relativistica (in assenza di gravitazione)
è innanzitutto una teoria in accordo con i postulati di Einstein e, dunque, una teoria invariante di Lorentz. Ma sarebbe errato pensare che il principio di relatività non esistesse
prima di Einstein; la meccanica classica di Galileo-Huygens-Newton e le sue numerose
ramificazioni soddisfa anch’essa a un principio di relatività, eccetto che il gruppo di simmetria è il gruppo di Galilei, diverso dal gruppo di Lorentz. Quest’ultimo ha la stessa
dimensione del gruppo di Galilei e quindi il suo ruolo, propriamente, non è introdurre il
principio di relatività, quanto ripristinare il principio già esistente in una forma che sia
valida anche per l’elettrodinamica di Maxwell-Lorentz.
In questo capitolo discuteremo brevemente le simmetrie non relativistiche soprattutto
nel campo della meccanica e dell’ottica, allo scopo di identificare quelle assunzioni ingiustificate la cui rimozione ha portato infine al punto di rottura creato dalla teoria di
Einstein.
1.1
Considerazioni generali
Due osservatori aventi posizione, orientamento e velocità diverse descrivono lo stato di
un sistema fisico in modo diverso. Per esempio, se si tratta di particelle gli assegnano
coordinate e velocità diverse oppure, se si tratta di un sistema quantistico, gli assegnano
vettori diversi del suo spazio di Hilbert.
Ma come si calcolano le nuove coordinate e velocità, o i nuovi vettori? Questa è una
materia delicata che riflette in larga misura le nostre opinioni sulla natura delle simmetrie
spazio-temporali. In generale, esiste un gruppo di trasformazioni, operanti sullo spazio
delle fasi o sullo spazio di Hilbert, le quali definiscono una legge di trasformazione degli
stati e delle variabili dinamiche; la struttura di gruppo tiene conto dell’idea naturale che
tali applicazioni si possano comporre e invertire. Per esempio, se si associa ad ogni rotazione nello spazio una matrice ortogonale 3 × 3, allora alla rotazione inversa sarà associata
l’inversa della matrice e a due rotazioni eseguite in successione è associata la matrice che
risulta dal prodotto delle due. L’insieme delle rotazioni, con questa corrispondenza, forma
un gruppo continuo isomorfo al gruppo ortogonale SO(3) delle matrici ortogonali 3 × 3.
4
Si noti che le applicazioni di cui stiamo parlando non sono la stessa cosa delle operazioni
fisiche con cui si cambiano effettivamente posizione, orientamento o velocità degli osservatori, tuttavia per comodità noi non faremo questa distinzione. Parleremo quindi di una
rotazione sia per indicare una rotazione fisica dell’osservatore (o dello stato), sia come di
un elemento del gruppo matematico delle matrici ortogonali 3 × 3.
C’è un’interpretazione passiva delle trasformazioni, secondo la quale il cambiamento dello
stato è attribuito al cambiamento dell’osservatore e allora si afferma, un pò vagamente, che
il gruppo “trasforma” un osservatore nell’altro. Ma si può anche dare un’interpretazione
attiva, secondo la quale l’osservatore resta lo stesso ma si ha un cambiamento reale dello
stato.
Ora, se le formule di trasformazione non hanno effetto sulle equazioni di una teoria nel
senso che ne mantengono inalterata la forma, allora le predizioni della teoria non dipenderanno, per esempio, dalla velocità del sistema di riferimento. Si parla allora di trasformazioni di simmetria, e del gruppo corrispondente come di un gruppo di simmetria; per
la precisione, poiché le trasformazioni connettono osservatori con diverso orientamento,
posizione e velocità, si parla di simmetrie spazio-temporali. In questo caso si ha quindi
un principio di relatività, cioè si afferma che le leggi della fisica sono le stesse per gli
osservatori le cui posizioni, velocità e orientamento relativi sono connesse da elementi del
gruppo di simmetria.
Ovviamente, il tratto caratteristico di una teoria relativistica è soprattutto la relatività
del moto, piuttosto che la relatività di orientamento o di posizione. La parola chiave è
dunque velocità relativa, ed è essenziale che il gruppo di simmetria contenga elementi che
corrispondono a osservatori in moto relativo, per parlare veramente di relatività. Se il
gruppo include le traslazioni temporali, allora le leggi sono anche le stesse ad ogni tempo.
Si noti che non si considerano osservatori accelerati, un problema che richiederebbe l’introduzione della relatività generale. D’altronde l’accelerazione ha effetti meccanici che si
possono rivelare anche stando all’interno di una cassa chiusa, e dunque una simmetria
che rendesse equivalenti due osservatori relativamente accelerati sembra, a prima vista,
del tutto impossibile.
Nel seguito studieremo i due principali esempi di simmetria spazio-temporale che si trovano in fisica e i corrispondenti principi di relatività: la simmetria galileiana che caratterizza
la meccanica di Galileo e Newton, brevemente, e la simmetria di Lorentz che caratterizza
la relatività ristretta, estensivamente. L’enfasi sarà posta evidentemente sulla relatività
del moto, il concetto in cui le due simmetrie si differenziano maggiormente.
1.2
Sistemi di riferimento e coordinate
Dato che i moti relativi sono i soli che si osservano, per una descrizione razionale del
moto e degli altri fenomeni fisici è essenziale introdurre quello che in fisica si chiama un
sistema di riferimento. Esso definisce uno standard convenzionale di quiete e le procedure
5
per la misura e la registrazione permanente delle coordinate di posizione e di tempo degli
eventi1 .
Si riconosce facilmente che i metodi usati allo scopo si basano tutti su due fatti fondamentali. Il primo è l’esistenza di corpi approssimativamente rigidi le cui proprietà sono
in ottimo accordo con gli assiomi e le proposizioni della geometria euclidea. L’immagine
scolastica del sistema di riferimento formato da tre piani rigidi ortogonali, poi idealizzato
nei tre assi ortogonali orientati, ha infatti la sua origine nella geometria euclidea e nei corpi rigidi. Le coordinate cartesiane hanno infatti il semplice significato fisico di lunghezze
misurate mediante regoli rigidi.
In secondo luogo l’esistenza dei campi elettromagnetici (campi EM), con la loro enorme
velocità di propagazione, è sufficientemente semplice e universale da rendere possibile il
loro impiego per la misura delle coordinate spazio-temporali (cioè di tempo e luogo, anche
qui localmente2 in accordo con gli assiomi e le proposizioni della geometria euclidea).
Per esempio, il global positioning system[1] (GPS) è una tecnologia sofisticata per la
determinazione delle coordinate che fa uso di satelliti e segnali EM di alta frequenza.
Le coordinate sono qui determinate non mediante l’uso di regoli rigidi, ma da misure
effettuate con segnali elettromagnetici e coinvolgono inevitabilmente la propagazione della
radiazione EM. In entrambi i casi, le coordinate spaziali sono misurabili e possiedono un
diretto significato fisico.
La coordinata temporale è invece determinata dal fatto che possiamo attribuire a certi
moti (la rotazione della terra o le oscillazioni di un pendolo), un carattere idealizzato e
privilegiato. Cioè si assume che il moto degli oggetti privilegiati , che chiameremo orologi,
non influenzi nè sia influenzato dagli oggetti che si vogliono indagare 3
Il carattere idealizzato degli orologi fornisce un concetto di tempo altrettanto idealizzato,
essenzialmente equivalente al tempo assoluto di Newton, del quale egli affermava “che
in sè e per sua natura, senza relazione ad alcunché di esterno, scorre uniformemente e
con altro nome è chiamato durata.” Newton era estremamente consapevole del fatto che
potrebbero non esistere moti rigorosamente uniformi con cui misurare il tempo, e forse
proprio per questo introdusse la sua definizione di tempo assoluto.
Il carattere idealizzato degli orologi è ancora più marcato nelle teorie quantistiche ma
non può essere mantenuto, per esempio, in relatività generale perché secondo quella teoria il ritmo degli orologi è influenzato dal campo gravitazionale, e dunque dalla presenza
delle masse astronomiche. Al contrario che del tempo, nelle teorie quantistiche non relativistiche le coordinate spaziali sono invece osservabili soggette a dispersione, e come
tali si riferiscono sia all’oggetto osservato che allo strumento che le misura. Questo fa sı́
che in tali teorie lo spazio e il tempo siano trattati in maniera completamente differente.
Nello svolgimento della relatività ristretta le problematiche legate alla teoria quantistica
saranno comunque completamente ignorate.
1
Come avverte B. Schutz nel suo ottimo libro, un sistema di riferimento non è semplicemente una
persona con il binoccolo, ma un sofisticato sistema di raccolta dati.
2
Sulle distanze cosmologiche le cose cambiano.
3
Ci sarebbe il problema importante di sapere in che misura queste ipotesi siano compatibili con le
leggi della fisica, ma di questo non ci occupiamo.
6
Vi sono altre idealizzazioni, meno importanti, di cui faremo spesso uso; per esempio, in
fisica classica si può generalmente parlare delle coordinate di un evento di emissione su
di una stella lontana anche se di solito non è possible misurarle veramente. Un altra
idealizzazione che useremo sarà riferirsi ai sistemi di riferimenti come se fossero sistemi di
coordinate.
1.3
1.3.1
Il gruppo di Galilei
Sistemi inerziali
Si sa per esperienza che esistono sistemi di riferimento nei quali una particella libera (cioè
non soggetta all’azione di forze esterne) si muove con velocità costante, un’affermazione
importante vecchia di alcuni secoli e nota come legge di inerzia 4 . Questi sono i sistemi
di riferimento inerziali (abbr. SRI), rispetto ai quali le equazioni del moto assumono la
forma semplice descritta da Newton nei Principia (la legge F = ma e le sue applicazioni
ai sistemi di particelle e ai corpi rigidi, al moto dei pianeti e delle comete e, più in
generale alla meccanica celeste, e ancora, alla fisica statistica classica, al moto dei fluidi,
all’aerodinamica, eccetera).
Ovviamente l’accelerazione può essere zero solo rispetto a un tempo opportuno, cioè
rispetto a un moto uniforme opportuno, e quindi la legge di inerzia implica una scelta
del tempo. Assumeremo quindi, come parte della definizione di un sistema di riferimento
inerziale, che sia possibile costruire e usare orologi idealizzati che siano consistenti con la
legge di inerzia. Lo chiameremo il tempo universale. Con buona approssimazione, e per gli
scopi pratici della vita quotidiana come ad esempio la definizione di un orario ferroviario,
un tale orologio è la sfera celeste delle stelle fisse, che segna il tempo siderale.
E1: Sia t il tempo universale e τ = f (t) una funzione monotona crescente di t. Si calcoli
l’accelerazione di una particella considerando τ come il nuovo tempo. Si deduca che la
legge di inerzia resta valida se e solo se τ = at + b, con a e b arbitrari ma a > 0.
È appena il caso di sottolineare che siccome l’assenza di forze si può accertare solo con
l’assenza di accelerazioni, un SRI non è esattamente definibile a meno che le sorgenti
di forza non siano tutte esattamente note. Ma per quanto riguarda la legge di inerzia è
altrettanto chiaro che ogni riferimento che si muove con moto traslatorio uniforme rispetto
a un sistema inerziale è esso stesso inerziale, e dunque che esiste un’infinità di tali sistemi.
Si pone il problema di trovare la formula di trasformazione delle coordinate associate a una
coppia arbitraria di sistemi inerziali. Per le coordinate useremo la notazione vettoriale,
con x = (x, y, z) e il significato usuale di x, y e z come di lunghezze misurate lungo i
rispettivi assi orientati (le coordinate cartesiane).
4
Per una discussione approfondita si veda E. Mach, “La meccanica nel suo sviluppo storico critico”,
Universale Scientifica Boringhieri, 1977.
7
1.3.2
Trasformazioni di Galilei
′
Se i sistemi inerziali F e F sono in moto relativo uniforme con velocità costante v, in
meccanica classica si considerano evidenti le seguenti formule di trasformazione
′
x = R · x + vt + a
(3.1)
′
t =t+τ
(3.2)
dove R è una matrice ortogonale (RRT = 1) che rappresenta una rotazione e la notazione
R · x denota, come al solito, il prodotto righe per colonne di R con x. Queste sono
le trasformazioni di Galilei. Una descrizione prosaica delle formule direbbe allora che
′
′
l’osservatore O in F osserva l’origine di F muoversi con velocità v e transitare per il
punto a nell’istante t′ = τ (o equivalentemente t = 0); osserva inoltre che i versori degli
′
assi orientati di F e F sono connessi dalla rotazione R
ej =
3
∑
′
Rij ei
(3.3)
i=1
e che l’orologio di O appare in ritardo di τ secondi rispetto al proprio (se τ > 0, altrimenti
′
è O che ritarda rispetto ad O). L’operazione corrispondente descrive una traslazione
temporale.
E2: Si mostri che una rotazione e una traslazione spaziale commutano se e solo se la
traslazione è diretta lungo l’asse di rotazione.
Le formule scritte sono convenienti per studiare la struttura di gruppo delle trasformazioni
′
galileiane. Talvolta è più conveniente immaginare che F sia il sistema mobile e F il
“sistema del laboratorio” considerato in quiete. Allora le coordinate dello stesso punto
nei rispettivi SRI sono connesse dalle formule equivalenti
′
x = R−1 · (x − vt − a)
(3.4)
Se v = 0 la formula descrive l’azione combinata di rotazioni (x → R · x) e traslazioni
(x → x − a), che però non hanno niente a che vedere con il moto relativo. Per scopi
pratici possiamo eliminare il ricorso alle rotazioni e alle traslazioni richiedendo che i sistemi
′
coincidano esattamente per t = t = 0. Allora si ha la trasformazione di Galilei speciale
′
x = x − vt (boost, in inglese) o, per esteso,
′
x
′
y
′
z
′
t
=
=
=
=
x − vx t
y − vy t
z − vz t
t
(3.5)
(3.6)
(3.7)
(3.8)
È importante rendersi conto che queste trasformazioni contengono, oltre al moto relativo,
anche certe assunzioni sulla natura dello spazio e del tempo, o meglio, sul comportamento
8
′
di regoli e orologi in movimento. Per esempio, adottando l’equazione t = t , si assume che
si possano costruire orologi il cui ritmo non dipende dalla loro velocità. L’altra assunzione
riguarda le distanze: le trasformazioni galileiane implicano immediatamente l’invarianza
della distanza spaziale
′
′
|x − y | = |R · (x − y)| = |x − y|
dove |x| = (x2 + y 2 + z 2 )1/2 . In altre parole, si assume che si possano costruire regoli
standard la cui lunghezza non dipende dallo stato di moto. Entrambe queste assunzioni
sono ingiustificate. Di fatto, il tempo assoluto è l’assunzione che non si può mantenere
in una teoria dove opera una velocità massima per la propagazione dei segnali, se le leggi
sono locali. Oggi sappiamo che la massima velocità in natura è raggiunta dalla radiazione
elettromagnetica nel vuoto (o dai fotoni), approssimativamente uguale a
c = 2, 99792 · 1010 cm · sec−1 ≃ 300.000 Km/sec.
e forse da qualche altra particella, come ad esempio certi tipi di neutrini. Per il resto, le
formule di trasformazione corrispondono evidentemente all’idea di uno spazio vettoriale
euclideo, dove le operazioni fondamentali sono quelle dell’algebra lineare o più generalmente dell’algebra affine (uno spazio vettoriale è uno spazio affine con la scelta di un’origine,
v. figura).
x
x’
vt
K’
K
x’=x−vt
′
Figura 1.1: x = x − vt
1.3.3
Struttura di gruppo
Le trasformazioni descritte dalle equazioni (3.1) e (3.2) formano un gruppo continuo a
dieci dimensioni, G, denominato gruppo di Galilei. Per indicare un elemento del gruppo
G usiamo la notazione
g = (R, v, a, τ )
(3.9)
9
e per indicare l’azione dell’elemento g sulle coordinate (x, t) scriviamo
( ) (
)
x
R · x + vt + a
g·
=
t
t+τ
(3.10)
Si noti che le coordinate definiscono formalmente un vettore in uno spazio cartesiano con
quattro dimensioni e che G opera (non linearmente) in questo spazio. Analogamente sia
′
′
′
′
′
g = (R , v , a , τ )
Allora iterando la formula di trasformazione (3.10) si ottiene facilmente la seguente
formula per il prodotto in G
′
′
′
′
′
′
′
′
g g = (R · R, R · v + v , R · a + v τ + a , τ + τ )
(3.11)
L’identità è l’elemento e = (1, 0, 0, 0), e si verifica facilmente che con queste operazioni
l’insieme delle g forma un gruppo. Quanto alla dimensione, si noti che occorrono tre
angoli per specificare R, tre numeri reali per v, tre per a e uno per τ , per un totale di
dieci numeri reali indipendenti. Questo è tutto ciò che si intende dicendo che il gruppo
ha dimensione dieci (anche se G non è uno spazio vettoriale).
E3: (i) Si provi a realizzare G e la formula del prodotto (3.11) mediante un gruppo di
trasformazioni lineari di uno spazio a 5 dimensioni (G è allora un gruppo di matrici 5 × 5
con l’usuale prodotto di matrici); (ii) dato g ∈ G si trovi il suo inverso, cioè l’elemento
g −1 tale gg −1 = g −1 g = e; (iii) si mostri che si può ottenere una traslazione spaziale
combinando un boost con una traslazione temporale.
1.4
Relatività e meccanica
Occupiamoci della relazione del gruppo di Galilei con le equazioni del moto. Nella descrizione classica del moto, per ogni particella si hanno tre variabili di posizione funzioni del
tempo, che è comune a tutte. Le leggi del moto eguagliano le forze per unità di massa con
le accelerazioni e sono dunque, tecnicamente parlando, sistemi di equazioni differenziali
ordinarie del secondo ordine. L’assegnazione delle forze e dei dati iniziali è allora tutto
ciò che serve per trattare matematicamente il problema del moto (cioè il calcolo della
traiettoria, per esempio le orbite dei pianeti). La teoria delle equazioni differenziali implica anche il determinismo della fisica classica, cioè il fatto che la traiettoria è localmente
univocamente determinata dalle condizioni iniziali.
1.4.1
L’addizione delle velocità
Due semplici conseguenze delle trasformazioni di Galilei sono la formula di addizione delle
velocità
′
u =u−v
(4.1)
10
′
che si ottiene differenziando l’espressione x = x − vt, e il carattere assoluto dell’accelerazione
′
du
du
a = ′ =
=a
dt
dt
′
′
′
Siano θ l’angolo tra u e v e θ quello tra u e v e poniamo anche u = |u|. Dal teorema di
addizione si hanno le formule (verificare)
′
′
′
′
tan θ =
′
′
u cos θ = u cos θ − v
u sin θ = u sin θ,
sin θ
cos θ − v/u
′
u = −v cos θ +
√
(4.2)
(4.3)
v 2 cos2 θ′ + u2 − v 2
(4.4)
Useremo questi risultati per verificare l’invarianza galileiana di alcune equazioni importanti che si incontrano nella fisica classica newtoniana.
E4: Un forte nuotatore, capace di una velocità di 5 m/s in acqua ferma, procede in un
fiume per 50 metri contro una corrente di 3 m/s e ritorna poi al punto di partenza con la
corrente a favore. Un secondo nuotatore di pari abilità attraversa il fiume ortogonalmente,
con andata e ritorno da riva a riva, distanti anche’esse 50 m. Chi termina per primo la
gara? Si deducano formule generali nel caso che velocità e distanze del problema siano
generiche; si denoti con c la velocità dei nuotatori e con v quella del fiume, la distanza sia
L.
1.4.2
Equazioni del moto di Newton
L’esempio paradigmatico di un sistema dinamico classico considera N punti materiali
soggetti a forze centrali, per cui
mi
d2 xi
= −∇i U (x1 , . . . , xN )
dt2
(4.5)
dove ∇i indica il gradiente rispetto alla variabile xi e l’energia potenziale U descrive
un’interazione a due particelle del tipo
∑
U (x1 , . . . , xN ) =
V (|xi − xj |) = V (r12 ) + V (r13 ) + · · · + V (r32 ) + · · · (4.6)
1≤i<j≤N
Qui rij = |xi − xj |. La terza legge del moto è allora automaticamente soddisfatta e l’invarianza per traslazioni spaziali e temporali è ovvia. Non vi è alcuna difficoltà di principio
a introdurre potenziali che coinvolgono tre o più particelle alla volta. Classici esempi di
interazione a due particelle sono l’interazione gravitazionale e l’interazione elettrostatica
coulombiana tra cariche puntiformi. Incidentalmente, le equazioni godono anche delle
simmetrie discrete (in opposizione a quelle continue) di riflessione: x → −x, t → −t,
11
che non si considerano parte del gruppo di Galilei ma che sono importanti per la teoria
quantistica e forse anche per la fisica statistica.
Nella dinamica newtoniana le masse sono assolute5 e dunque tali sono anche le forze. È
allora immediato constatare che le equazioni del moto (4.5) sono covarianti per trasfor′
mazioni di Galilei, vale a dire che le variabili trasformate x = R · x + vt + a obbediscono
anch’esse alle equazioni del moto (4.5).
Ovviamente se R, v e a dipendessero dal tempo o dal punto (come per le rotazioni)
questo non sarebbe più vero. Più in generale esistono infinite trasformazioni delle variabili dinamiche che non mantengono la forma delle equazioni del moto, un fatto che ha
impressionato Newton, pare, più della covarianza galileiana appena descritta.
E5: Verificare esplicitamente questo fatto, per esempio supponendo che v dipenda dal
tempo. Come cambia la (4.1)? Si verifichi anche la proprietà di covarianza delle (4.5).
Osservazione: Si potrebbe chiedersi quale sia il gruppo massimale di covarianza delle
equazioni del moto (4.5) e se questo abbia un significato fisico, però si scopre che questo
dipende essenzialmente dal tipo di forze applicate e dalla forma dell’energia potenziale.
Per esempio, se due particelle interagiscono solamente con forze centrali la simmetria extra include formalmente il gruppo delle rotazioni in quattro dimensioni (SO(4) anziché
SO(3)). Abbiamo anche visto che in generale sono presenti simmetrie discrete di riflessione. Per una particella libera il gruppo di covarianza è un’estensione del gruppo di
Galilei a un gruppo di dimensione dodici, detto gruppo di Schrödinger. Anche questo
gruppo cessa di rappresentare simmetrie non appena si introducono le interazioni. Queste
simmetrie sembrano dunque accidentali e non le prenderemo in esame. Tuttavia non è
mai opportuno dimenticarsene completamente. Se esistono buone ragioni per imporre
simmetrie extra, oltre a quelle già richieste dal principio di relatività, queste possono diventare strumenti potenti per generalizzare le teorie della fisica. Gran parte degli sviluppi
moderni nella fisica delle particelle elementari sono infatti derivati da argomenti di questo
tipo.
1.4.3
Sistemi continui: il fluido perfetto e la conduzione del
calore
Nella meccanica dei continui, un altro esempio di teoria covariante galileiana è fornito dal
moto isoentropico di un fluido perfetto. Le equazioni sono quelle di Eulero
1 ∂p
∂ui
+ u · ∇ui = −
∂t
ρ ∂xi
(4.7)
5
Il rapporto fra due accelerazioni, che è una grandezza assoluta, determina il rapporto inverso delle
masse. Scelto dunque una volta per tutte un corpo standard che fornisca un’unità di massa, le altre masse
possono essere determinate usando il principio di azione e reazione, per esempio mediante collisioni, e
saranno conseguentemente invarianti.
12
dove u(t, x) è il campo di velocità del fluido, p è la pressione e ρ la densità di massa,
vincolati a soddisfare l’equazione di continuità
∂ρ
+ div(ρu) = 0
∂t
(4.8)
Per chiudere il sistema di equazioni deve anche essere assegnata un’equazione di stato,
esprimente p in funzione di ρ, per esempio l’equazione barotropica p = (γ − 1)ρ. Le
trasformazioni di Galilei devono ora tenere conto del fatto che le variabili sono campi,
cioè grandezze che dipendono dalla posizione oltre che dal tempo. Tuttavia, le formule di
′
′
trasformazione sono abbastanza evidenti: per l’osservatore inerziale in F poniamo (t = t
è sottinteso, a = 0 e R = 1, in altri termini studiamo il boost)
′
′
′
′
′
u (t, x ) = u(t, x + vt) − v
′
ρ (t, x ) = ρ(t, x + vt),
(4.9)
′
′
′
p (t, x ) = p(t, x + vt)
(4.10)
Queste formule ci dicono semplicemente che la densità e la pressione in ogni punto del
fluido sono le stesse per entrambi gli osservatori, mentre i campi di velocità differiscono
′
solo per un moto collettivo di traslazione uniforme. Infatti, dato che x + vt = x, i secondi
membri di queste equazioni sono realmente valutati in x.
Con queste trasformazioni è facile mostrare che le equazioni del moto del fluido sono
covarianti galileiane.
E6: Provare l’affermazione appena fatta. Si usino le formule
′
∂u
∂u
=
+ v · ∇u,
∂t
∂t
′
∂ρ
∂ρ
=
+ v · ∇ρ
∂t
∂t
Quale trasformazione rende le equazioni di Eulero invarianti per inversione temporale?
Vale ancora per l’equazione di Navier-Stokes?
In presenza di viscosità si deve aggiungere al secondo membro della (4.7) il termine
η
∆u
ρ
dove η > 0 è il coefficiente di viscosità, e si hanno cosı́ le equazioni di Navier-Stokes. Il
nuovo termine è invariante galileiano, come si vede usando la (4.9).
La novità dei fluidi rispetto alle particelle puntiformi è stata la necessità di introdurre
una legge di trasformazione di tipo nuovo. Nel prossimo esempio, il calore, vedremo come
la richiesta di covarianza può anche suggerire la forma corretta di un’equazione fisica.
L’equazione della propagazione del calore in un corpo solido immobile diventa, nel caso
semplice di corpi omogenei e isotropi, la seguente equazione per la distribuzione della
temperatura T nel corpo
∂T
= χ∇2 T
∂t
(4.11)
13
dove χ è la conducibilità termica (funzione della temperatura e della pressione). Assumeremo che T sia uno scalare, cioè che
′
′
′
T (x , t) = T (x + vt, t)
(4.12)
Allora si vede subito che la (4.11) non è invariante, in quanto
′
∂T
∂T
=
+ v · ∇T
∂t
∂t
Il termine di trasporto, v · ∇T , può essere eliminato solo se nell’equazione originale vi
è un termine di trasporto analogo. Deduciamo dunque che l’equazione del calore per un
corpo in movimento con velocità u deve essere corretta con un termine analogo:
∂T
+ u · ∇T = χ∇2 T
∂t
(4.13)
′
Poiché u = u + v, l’equazione è ora covariante. Si può quasi dire, in questo caso, che il
principio di relatività definisce la fisica.
Dal punto di vista della teoria delle rappresentazioni del gruppo di Galilei, le grandezze
(Ṫ , ∇T ) si trasformano come una delle due possibili rappresentazioni quadri-vettoriali
del gruppo: detto (η, χ) un quadri-vettore generico6 si ha (per trasformazioni di Galilei
′
speciali: x = x − vt)
′
I : η = η + v · χ,
′
χ =χ
oppure in alternativa
′
II : η = η,
′
χ = χ + ηv
Infatti
T˙ ′ = Ṫ + v · ∇T,
′
′
∇ T = ∇T
Un esempio di grandezze che seguono la seconda formula di trasformazione è la coppia
densità di massa, corrente di massa: (ρ, ρu).
Il prossimo esempio mostrerà che non sempre la formula di trasformazione è evidente.
1.4.4
L’equazione di Schrödinger
Nel caso della particella libera, l’equazione di Schrödinger che sostituisce la legge classica
E = p2 /2m, o v̇ = 0, è (con ℏ = 1)
i
6
∂Ψ
1 2
=−
∇Ψ
∂t
2m
(4.14)
Si ricordi che il gruppo agisce in uno spazio a quattro dimensioni.
14
L’invarianza per traslazioni e rotazioni è evidente se si definisce la trasformazione attiva
della funzione d’onda nel seguente modo7
′
Ψ (x, t) = Ψ(R−1 · (x − a), t − τ )
(4.15)
′
Si noti che l’applicazione Ψ → Ψ è unitaria rispetto al prodotto scalare
∫
(Ψ, Φ) =
Ψ(x)Φ(x) d3 x
R3
′
Consideriamo il boost x = x + vt. Ora la formula di trasformazione è più complicata:
con qualche calcolo si verifica facilmente che la nuova funzione d’onda
(
)
mv 2
′
Ψ (x, t) = exp −i
t + imv · x Ψ(x − vt, t)
(4.16)
2
′
soddisfa ancora l’equazione di Schrödinger e che la trasformazione Ψ(x, t) → Ψ (x, t) ≡
[T (v)Ψ](x, t) è unitaria. La mappa T (v) è una rappresentazione: T (v1 +v2 ) = T (v1 )T (v2 ).
E7: Si scriva la trasformazione passiva che corrisponde alla trasformazione attiva (4.16).
Suggerimento: una trasformazione attiva seguita da una passiva (o viceversa) producono
l’identità.
E8: Si scriva l’equazione di Schrödinger per due particelle identiche interagenti con un
potenziale del tipo (4.6) adattato a due particelle, e si verifichi la covarianza dell’equazione
generalizzando opportunamente la (4.16) per Ψ(x1 , x2 , t).
E9: Si aggiunga al secondo membro della (4.14) un termine di potenziale U (r)Ψ, r = |x|.
L’equazione è ancora covariante galileiana? Qual’è il gruppo manifesto di simmetria?
La formula di trasformazione (4.16) introduce una fase che dipende dalla velocità relativa.
È quindi interessante osservare che se fosse possibile misurare la fase relativa di due
particelle con masse diverse allora, effettuando un boost, si potrebbe misurare la velocità
relativa dei due sistemi inerziali. Per salvare la simmetria galileiana, o equivalentemente
il principio di relatività, si impone allora la regola di superselezione secondo la quale non
sarebbe possibile preparare combinazioni lineari di stati descriventi particelle con masse
diverse.
Osservazioni. La formula di trasformazione (4.16) sembra scritta ad hoc per avere la
covarianza dell’equazione di Schrödinger. Naturalmente il fatto notevole è che una tale
formula esista, e possiamo chiederci allora se non vi sia un modo sistematico per trovare
le formule di trasformazione in casi più complicati. La materia che si occupa di questi
problemi è una teoria matematica nota come teoria della rappresentazione dei gruppi. Essa
fornisce la classificazione delle formule di trasformazione possibili e determina il carattere
delle grandezze che si trasformano o, come si suol dire, lo spazio della rappresentazione.
7
′
′
′
La versione passiva è Ψ (x , t) = Ψ(x, t), dove x = R · x + a.
15
Gli esempi discussi sopra definiscono alcune rappresentazioni del gruppo di Galilei: la
prima opera sullo spazio vettoriale dei vettori di posizione delle particelle, la seconda e
la terza su campi vettoriali e scalari che dipendono dal tempo e la quarta sullo spazio di
Hilbert di una particella libera.
1.4.5
Il principio di relatività galileiano
Il fatto che le equazioni del moto siano identiche in tutti i sistemi di riferimento inerziali,
se le formule di trasformazione sono quelle di Galilei, è la versione matematicamente
precisa dell’affermazione euristica nota come principio di relatività galileiano, secondo
il quale le leggi della meccanica sono a priori indipendenti dai sistemi di riferimento
inerziali ai quali sono riferite. In particolare, non sarà possibile determinare la velocità
di un laboratorio installato in un SRI compiendovi esperimenti meccanici su sistemi isolati
(cioè disaccoppiati dal mondo esterno) e dunque non sarà nemmeno possibile, in questo
senso, determinare la velocità assoluta della terra (la velocità riferita allo spazio assoluto).
Il termine “a priori” significa “prima di ogni processo di misura”. È chiaro che la misura
di qualche effetto fisico può essere usata per discriminare sistemi di riferimento diversi.
′
E10: Si supponga che F sia uniformemente accelerato rispetto a F : si dimostri che le
′
equazioni del moto in F sono identiche alle equazioni che si userebbero in F in presenza
di un campo gravitazionale uniforme. Si può usare questa proprietà come argomento per
estendere il principio di relatività ai sistemi uniformemente accelerati?
1.5
Ottica non relativistica
Nuove opportunità e nuovi problemi sorgono in relazione ai fenomeni connessi con la propagazione della luce. Infatti le equazioni di Maxwell non hanno la proprietà di covarianza
richiesta dal principio di relatività galileiano, cioè non sono invarianti per trasformazioni
di Galilei. Per capirlo basta notare che la velocità di un impulso elettromagnetico dipende
dal sistema di riferimento, se vale la (4.1), mentre le equazioni di Maxwell predicono che
sia indipendente dal moto della sorgente e uguale alla costante universale c che compare
nelle equazioni stesse.
Lo stesso Maxwell pensava che le sue equazioni valessero in una classe limitata di sistemi
di riferimento, quelli in quiete rispetto al cosiddetto etere, una sostanza imponderabile
ed elastica presente nell’universo che si credeva propagasse la luce e rendesse possibili i
fenomeni elettromagnetici, alla stessa maniera che un gas è necessario per la propagazione
del suono.
Ma se è cosı̀ allora dovrebbe essere possibile misurare la velocità assoluta della terra,
perché il suo moto attraverso l’etere causerebbe un “drift” in grado di alterare la velocità
della luce a seconda della sua direzione di propagazione.
Ma se non sappiamo quali sono le equazioni elettromagnetiche in un riferimento mobile,
come si possono trattare i fenomeni elettromagnetici in un riferimento terrestre, in mo-
16
vimento rispetto all’etere? La maniera più semplice e diretta è determinare l’effetto del
gruppo di Galilei sulle caratteristiche di un’onda elettromagnetica piana.
1.5.1
onde piane e velocità di fase
Si consideri un’onda piana che si propaga nel piano z = 0, cioè il versore di propagazione
sia nel piano (x, y). Nel sistema di riferimento assoluto, F , dove l’etere è immobile, la
fase dell’onda è
(
)
(
x cos α + y sin α
r)
F(t, x, y) = ν t −
=ν t−
(5.1)
c
c
c è la velocità di fase, uguale in F alla velocità della luce nel vuoto, ν è la frequenza e
n = (cos α, sin α) è il versore che indica la direzione di propagazione. Espressa in funzione
′
′
delle coordinate del sistema inerziale F in moto rispetto a F , che sono x = x − vt,
′
′
y = y, t = t, la fase diventa
)
(
′
′
′
(x + vt ) cos α + y sin α
′
F(t, x, y) = ν t −
c
oppure, riordinando i termini,
(
′
′
′
′)
x cos α + y sin α
′
′
F(t, x, y) = ν t −
c′
dove
(
)
(
v
v · n)
′
ν = ν 1 − cos α = ν 1 −
c
c
(5.3)
′
c = c − v cos α = c − v · n
′
ν
ν
′
cos α = ′ cos α
c
c
(5.2)
(5.4)
′
ν
ν
′
sin α = ′ sin α
c
c
(5.5)
Un semplice argomento mostra che la fase è invariante (v. appendice A) cosicché F(t, x, y)
′
′
′
′
nella (5.2) è anche la fase in F . Questo significa semplicemente che ν , c e α sono
′
rispettivamente la frequenza, la velocità di fase e la direzione dell’onda in F . Dalle (5.5)
′
si ottiene subito α = α , mentre per la lunghezza d’onda si ha (diversamente che dal caso
relativistico)
′
′
′
1/λ = ν /c = ν/c = 1/λ
(5.6)
Introducendo il numero d’onde, k = (2π/λ)n, le (5.5) si compendiano nell’equazione
′
vettoriale k = k. Apparentemente, dunque, la teoria non predice aberrazione per la luce.
Ritorneremo sulla questione in seguito.
17
′
La (5.4) determina la velocità di fase nel sistema F , mentre la (5.3) mostra come si
′
trasforma la frequenza; entrambe dipendono dalla velocità assoluta di F , che può quin′
di essere determinata, in linea di principio, compiendo esperimenti ottici in F . Una
precisazione necessaria è che la velocità dei segnali elettromagnetici misurata in questi
esperimenti non è la velocità di fase, che è inosservabile, ma la velocità di gruppo.
E11. La luce proveniente dalla galassia di Andromenda (M31) ha uno spostamento verso il
blu (parte alta dello spettro) di una parte su 1000, cioè ∆ν/ν ≃ 0, 001. Con quale velocità
radiale si sta muovendo Andromeda rispetto a noi? E si avvicina o si allontana? Un
“gamma ray burst” recentemente osservato, il GRB090423, ha uno spostamento relativo
verso il rosso pari a 8, cioè la frequenza ricevuta è 1/9 di quella emessa. Se interpretiamo
lo spostamento come effetto Doppler con che velocità si allontana?
1.5.2
la velocità di gruppo
La velocità di gruppo compare quando si ha a che fare con pacchetti d’onde, sovrapposizioni lineari di onde elettromagnetiche piane con vettori d’onda e frequenze leggermente
diversi da un certo vettore d’onda medio. Si può determinare la velocità di gruppo con la
nota formula8
u=
∂ω
∂k
ω = 2πν
dove k = 2πλ−1 n e le derivate sono calcolate nel vettore d’onda medio. Usando la (5.3)
′
e k = k, si ottiene subito il teorema di addizione
′
u =u−v
u = |u| = c
(5.7)
che è identico al teorema di addizione delle velocità per le particelle di materia. Ponendo
′
′ ′
u = u e , si ottiene il modulo in funzione della direzione
′
′
′
u = −v · e + {(v · e )2 + c2 − v 2 }1/2
′
(5.8)
′
Dalla (5.7) si ha u ∧ v = u ∧ v e u · v = u · v − v 2 , ovvero9
′
′
u sin θ = u sin θ,
′
′
u cos θ = u cos θ − v
(5.9)
da cui la formula
′
tan θ =
sin θ
cos θ − v/u
(5.10)
Vediamo dunque che la frequenza, la velocità di fase e la velocità di gruppo della radiazione
elettromagnetica dipendono dalla velocità degli osservatori rispetto al sistema assoluto.
8
9
Un’abbreviazione per ux = ∂ω/∂kx , etc.
Ricordarsi che |a ∧ b| = ab sin θ e a · b = ab cos θ.
18
La direzione di propagazione e la lunghezza d’onda, invece, rimangono invariate. Vale
inoltre per la luce lo stesso teorema di addizione delle velocità che vale per le particelle
di materia. In particolare le formule (5.10) e (4.3) sono identiche, con le opportune
identificazioni (i.e. u al posto di c).
E12: Si usi la formula (5.10) per determinare l’angolo di incidenza della pioggia vista dal
finestrino di un treno in corsa, con un’assunzione ragionevole sul valore di θ. Cosa sono
in questo caso v e u? Conviene assumere che v/u ≪ 1?
E13: Per la luce stellare osservata dalla terra è probabile che v/c ≪ 1; dalla (5.10) si
′
ottenga una formula per θ − θ, valida al primo ordine in v/c.
1.5.3
La velocità della luce nei dielettrici trasparenti
In un dielettrico trasparente fermo nel sistema assoluto, la velocità della luce è c/n, dove
n > 1 è l’indice di rifrazione. Se però il dielettrico si muove rispetto all’etere, la velocità
di fase e la velocità di gruppo sono in generale diverse da c/n, sia rispetto al dielettrico
che rispetto al sistema assoluto.
Questo pose un problema che provocò molto dibattito tra gli scienziati ottocenteschi, in
parte perché la risposta dipende in modo essenziale dalle assunzioni che si possono fare
sul comportamento dell’etere in un mezzo in movimento.
Una semplice ipotesi era che l’interazione fra etere e materia fosse estremamente debole, se
non nulla, e che l’etere passasse dunque indisturbato attraverso la materia. Un’altra, forse
più ragionevole, era che il trascinamento fosse solo parziale (teoria di Fresnel). Conviene
allora trattare tutti i casi simultaneamente e assumere che la velocità dell’etere rispetto
al sistema assoluto F a causa del trascinamento sia
0≤f ≤1
w = f v,
essendo v la velocità assoluta del mezzo, misurata in F . Il parametro f si chiama “il
coefficiente di trascinamento” di Fresnel, il quale ne dava l’espressione
f =1−
1
n2
espressione che egli derivò dalla sua teoria elastica dell’etere. Il caso f = 1 era quello
che preferiva Stokes. Si noti però che f dipende dalla frequenza della luce, cosicché il
trascinamento dell’etere dipenderebbe anche dal suo “colore”.
Nel sistema Ff che si muove con velocità f v rispetto a F , l’etere è immobile e la velocità
di fase è c/n. Per la velocità di fase in F avremo quindi (dall’eq. (5.4))
c
c0 = + f v · n
(5.11)
n
e per la velocità di gruppo (teorema di addizione)
c
u = uf + f v
|uf | =
(5.12)
n
19
dove uf è la velocità di gruppo in Ff . Da qui si ricava
{
}1/2
c2
2 2
2
u = f v · e + (f v · e) + 2 − f v
n
(5.13)
dove e denota il versore della direzione di propagazione della luce, misurato in F . La
′
′
velocità di F rispetto a Ff è (1 − f )v, e dunque la velocità di fase in F è
′
c =
c
c
v·n
− (1 − f )v · n = − 2
n
n
n
(5.14)
La seconda eguaglianza vale se f ha il valore di Fresnel. Per la velocità di gruppo avremo,
analogamente,
′
u = uf −
v
n2
(5.15)
Le equazioni (5.12) e (5.15) riconfermano il teorema di addizione
′
u=u +v
(5.16)
′
′
Detto e il versore di propagazione in F , dalla (5.15) si ricava infine
{
}1/2
1
c2
v2
′
′
′ 2
−4
u = − 2 v · e + n (v · e ) + 2 − 4
n
n
n
(5.17)
Le formule (5.11), (5.13), (5.14), (5.16) e (5.17) risolvono il problema posto. Applicazioni
agli esperimenti saranno discusse più avanti. Al primo ordine nel parametro piccolo v/c
si ottengono le formule utili
(
)
c
1
u= + 1− 2 v·e
(5.18)
n
n
c
v·e
u = − 2
n
n
′
′
(5.19)
E14: Un raggio di luce si propaga all’interno di un tubo di acqua corrente, nel verso della
medesima. La velocità della corrente rispetto al sistema assoluto sia v: quanto vale la
′
velocità della luce nel sistema assoluto? E nel sistema F dove l’acqua è in quiete? E se
il verso di propagazione è opposto alla corrente? Se è ortogonale?
20
1.5.4
L’aberrazione e l’effetto Doppler
La formula (5.10)
′
tan θ =
sin θ
cos θ − v/c
(5.20)
′
connette la direzione di un raggio di luce misurata in un laboratorio terrestre F , con la
sua direzione assoluta (che in generale non si conosce).
′
La formula (5.3) connette invece la frequenza in F con la frequenza assoluta (che pure,
in generale, non è nota). In entrambi i casi però, le formule predicono effetti osservabili
di grande rilevanza pratica e concettuale.
Aberrazione stellare
Se la luce proviene da una stella lontana e se ciò che interessa è l’effetto di aberrazione
al primo ordine in v/c, allora si può supporre che la stella sia in quiete rispetto all’etere.
La direzione assoluta della stella è allora ϑ = π − θ e la direzione relativa (o apparente)
′
′
è ϑ = π − θ . La (5.20) diventa la formula dell’aberrazione stellare, dove, espandendo in
serie al primo ordine in v/c, si ha
′
tan ϑ =
sin ϑ
v tan ϑ
≃ tan ϑ −
cos ϑ + v/c
c cos ϑ
(5.21)
′
Ponendo δϑ = ϑ − ϑ ≪ 1 radianti10 (angolo di aberrazione) si ottiene, con buona
approssimazione,
δϑ = −
v
′
sin ϑ
c
in accordo con le prime osservazioni di Bradley (1727), e successive. Ora la velocità
′
della terra varia nel corso dell’anno, cioè ϑ dipende dal tempo, e dunque l’aberrazione è
osservabile e si manifesta come un moto annuale apparente delle stelle lungo piccole ellissi
′
di estensione angolare ∼ v sin θ /c (per una stella allo zenit si tratta di circa 41′′ ), dovuto
alla rivoluzione della terra intorno al sole. Si noti che l’aberrazione stellare non dipende
dalla distanza delle stelle (a differenza della parallasse, che pure è dovuta alla rivoluzione
terrestre) e che lo spostamento angolare della stella è nella direzione del moto della terra,
come avviene per la direzione della pioggia vista attraverso il finestrino di un treno in
corsa.
L’importanza dell’aberrazione per la relatività è dovuta al fatto che l’angolo di aberrazione non cambia se il telescopio è riempito d’acqua (Airy, 1871-73), mentre nella teoria
dell’etere secondo Lorentz questo è vero solamente al primo ordine in v/c (a causa del
10
1 rad = 57, 29o = 206.265′′ ; 1 arcsec = 0, 48 × 10−5 rad.
21
drift). In effetti il percorso della luce fra due punti dati è determinato dal principio di
Fermat, secondo il quale l’integrale curvilineo sui cammini γ(p, q) da p a q
∫
T (p, q) =
γ(p,q)
dσ
,
u′
′
v·e
c
u = − 2
n
n
′
′
assume un valore minimo sul cammino effettivamente percorso dalla luce. La velocità u
è quella ricavata dalla (5.19), e si vede che dipende esplicitamente dalla direzione e dalla
′
velocità assoluta della terra. Dal punto di vista della teoria della relatività, u = c/n
e le osservazioni di Airy sono la semplice conseguenza del fatto che un raggio incidente
normalmente sulla superficie di separazione di due dielettrici diversi non subisce rifrazione.
l’effetto Doppler
L’equazione (5.3) dell’effetto Doppler
(
v · n)
′
ν =ν 1−
c
non può essere sperimentalmente verificata se non si conosce la frequenza assoluta ν; quello
che si può fare è allora calcolare il rapporto, νo /ν1 , della frequenza di una sorgente avente
velocità assoluta vo con la frequenza rivelata da un detector avente velocità assoluta v1 ,
cosı́ da eliminare la frequenza incognita ν. Si ottiene
νo
1 − vo · n/c
(v1 − vo ) · n (v1 · n)(v1 − vo ) · n
−1=
−1=
+
+ ···
ν1
1 − v1 · n/c
c
c2
(5.22)
Si vede che al primo ordine in v/c questo rapporto dipende solo dalla proiezione della
velocità relativa, vr = vo − v1 , lungo la linea di vista, in accordo con la teoria della
relatività e con le osservazioni. Ma i termini successivi dello sviluppo in serie dipendono
dalle velocità assolute, che sono quindi misurabili in linea di principio. Storicamente, le
prime osservazioni di precisione furono eseguite da Ives e Stilwell (nel 1938, ma ad angolo
zero) e non confermano la (5.22), bensı́ la formula fornita dalla teoria della relatività.
Ironicamente, sembra che il reale intento dei due fisici fosse quello di screditare la teoria
della relatività.
1.6
Esperienze di fine secolo XIX
In base alle formule trovate, è possibile misurare la velocità della terra rispetto all’etere
′
se si riesce a misurare u in un laboratorio terrestre. Dei vari esperimenti di interferenza
progettati discuteremo brevemente e schematicamente quelli storici di Hoek, Fizeau e di
Michelson e Morley (MM), nonché gli effetti di aberrazione e lo spostamento Doppler
delle frequenze. I primi due non avevano la sensibilità necessaria per misurare i termini
quadratici in v/c (che è di ordine 10−4 per un esperimento terrestre), per cui è sufficiente
22
approssimare le (5.13) e (5.17) al primo ordine in v/c. Si ottengono facilmente le formule
(5.18) e (5.19), che riscriviamo per comodità
(
)
c
1
u= + 1− 2 v·e
n
n
′
c
v·e
u = − 2
n
n
Come vedremo, nella teoria della relatività la prima si ricava dalla cinematica relativistica
senza bisogno di introdurre l’etere (come fu notato da M. von Laue), mentre la seconda
′
diventa semplicemente u = c/n.
′
1.6.1
Hoek
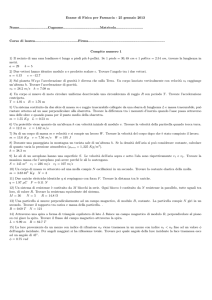
L’esperimento di interferenza di Hoek (1868) è schematicamente rappresentato in Fig. [1]:
Figura 1.2: Esperimento di Hoek
L
2
S
1
T
F è una sorgente, T è l’interferometro e il tratto di lunghezza L contiene un dielettrico
trasparente (per esempio acqua) con indice di rifrazione n. Il raggio di luce si divide
in due raggi che percorrono il rettangolo in direzioni opposte e interferiscono in T . Si
suppone che la velocità dell’apparato rispetto al sistema assoluto sia parallela al braccio
orizzontale dell’interferometro raffigurato. Usando la (5.19) per calcolare i tempi t1 e t2
richiesti ai raggi per completare il giro dell’apparato, è facile ottenere
t1 − t2 =
L
nL
nL
L
−
+
−
c − v c + v c + v/n c − v/n
Al primo ordine in v/c si ottiene t1 − t2 = 0, in buon accordo con le osservazioni di Hoek.
Se al posto del valore di f dato da Fresnel avessimo usato f = 0 oppure f = 1 (l’ipotesi
23
di Stokes), il risultato sarebbe stato non nullo. L’esperimento elimina dunque questi due
casi e nello stesso tempo verifica la teoria di Fresnel. L’esperimento è anche in accordo
con il punto di vista relativistico, perché se la velocità della luce è c in tutti i riferimenti
inerziali e in ogni direzione (o c/n se è presente un dielettrico) allora il risultato nullo di
Hoek diventa ovvio.
Si noti comunque che l’indice di rifrazione dipende dalla frequenza (per il fenomeno della
dispersione), un fatto che richiederebbe l’introduzione di un’etere per ogni colore della luce. Le misure di precisione degli effetti del secondo ordine in v/c hanno comunque confermato la teoria della relatività, e la teoria di Fresnel è stata definitivamente
abbandonata.
1.6.2
Fizeau e Fresnel
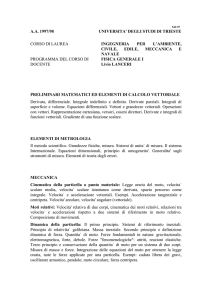
È interessante osservare che la formula di Fresnel fu confermata anche da un esperimento
indipendente dovuto a Hyppolite Fizeau (1851, 1853). Questo esperimento è schematicamente rappresentato nella Fig. [2]: come sopra, F è una sorgente, T è l’interferometro e
nel tratto di lunghezza L vi è una forte corrente d’acqua con velocità v. Il raggio di luce
si divide in due raggi che percorrono il rettangolo in direzioni opposte e interferiscono in
T . Si suppone che la velocità dell’apparato rispetto al sistema assoluto sia parallela al
braccio orrizontale dell’interferometro. Rispetto alla figura di interferenza ottenuta con
acqua immobile, si ottiene un marcato spostamento delle frange.
Dall’esperienza di Hoek sappiamo che il moto dell’apparato rispetto all’etere non dà effetti
osservabili al primo ordine in v/c, perciò possiamo supporre che l’apparato sia in quiete nel
sistema assoluto. Possiamo usare in tal caso la (5.13), in cui v è semplicemente la velocità
dell’acqua rispetto all’etere. Si ottiene, con le notazioni usate sopra, lo spostamento di
fase
δF = ν(t1 − t2 ) =
2νLv 2
(n − 1) ∼ 2 × 10−6 (n2 − 1)Lv radians
c2
in accordo con le osservazioni di Fizeau.
L’esperimento determina la velocità della luce in un dielettrico in movimento, in accordo
con la (5.18), e dunque conferma la teoria di Fresnel se, come sopra, si ignorano i fenomeni dispersivi. Si noti che l’esperimento, con questa interpretazione, può essere usato
per misurare la velocità assoluta dell’acqua, piuttosto che la velocità della terra rispetto
all’etere, ma in realtà esso misura soltanto la velocità dell’acqua rispetto al laboratorio.
1.6.3
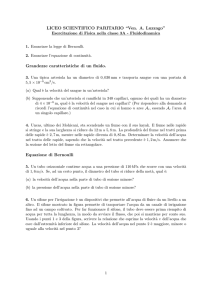
Michelson e Morley
Questo è il primo esperimento (1887) che misura effetti del secondo ordine in v/c. L’interferometro usato è schematizzato nella figura
Con la direzione indicata della velocità si ricava facilmente, usando la (5.8), il tempo
totale di andata e ritorno dei due raggi lungo i bracci dell’interferometro. Per i raggi uno
24
Figura 1.3: Esperimento di Fizeau
L
2
S
1
V
T
e due si ha, rispettivamente (si ricordi l’esercizio E4: qui i due nuotatori sono i raggi di
luce e la corrente è il drift dell’etere),
t∥ =
2Lv
,
− v2
c2
t⊥ = √
2L
− v2
c2
Da qui si deriva la differenza di fase
δF =
2Lν v 2
∼ 2 × 10−3 L rad = 0, 2 (L/1 m) rad
c c2
(6.1)
con precisione del secondo ordine in v/c. L’esperimento non ha rilevato spostamenti
significativi delle frange di interferenza in seguito alla rotatione dell’apparato, nonostante
Michelson e Morley fossero in grado di misurare spostamenti molto più piccoli di quello
previsto dall’Eq. (6.1). Più precisamente, la velocità della luce in due direzioni ortogonali
risultava identica entro un margine di ±5 Km/sec. In un esperimento del 1964 questo
margine è stato ridotto a ±1 Km/sec e, in tempi più recenti, praticamente a zero (ma
dipende dai punti di vista, v. più avanti).
1.6.4
Interpretazioni
(i) Per salvare la teoria dell’etere Lorentz e, indipendentemente, Fitzgerald proposero allora che il braccio dell’interferometro parallelo alla velocità
di traslazione della terra si
√
2
contraesse rispetto al braccio ortogonale del fattore 1 − v /c2 . Con questa ipotesi si
ha ovviamente t1 = t2 , e δF = 0. Non discutiamo qui i tentativi fatti, specialmente da
Lorentz, per derivare l’ipotesi della contrazione dalla teoria atomica della materia. La
formula della contrazione è infatti una semplice conseguenza cinematica delle trasformazioni di Lorentz, e in quanto tale non richiede ipotesi particolari sulla struttura della
25
Figura 1.4: Esperimento di Michelson-Morley
2
S
1
V
T
materia. Era opinione di Pauli, tuttavia, che non si dovesse rinunciare del tutto a una
tale spiegazione.
(ii) Un’altra interpretazione del risultato nullo di MM è supporre che la velocità della luce
sia uguale a c solo rispetto alla sorgente (come per i proiettili). Teorie di questo tipo,
dette emissive, sono però in difficoltà con il fenomeno dell’aberrazione stellare.
(iii) È anche interessante osservare come MM richieda la relatività del tempo. Si osservi
infatti l’esperimento da un sistema F rispetto al quale l’apparato si muove con velocità
v. Allora per i tempi di volo dei raggi si ottiene
ct1 =
2l1
,
1 − v 2 /c2
ct2 = √
2l2
1 − v 2 /c2
′
Se l0 è la lunghezza dei bracci nel√sistema di quiete F dell’apparato, per la contrazione
di Lorentz-Fitzgerald si ha l1 = l0 1 − v 2 /c2 , l2 = l0 ; dunque
2l2
ct1 = ct2 = √
1 − v 2 /c2
e si ha l’accordo con l’esperienza. Se si assume però che il tempo sia assoluto, che era il
punto di vista di Abraham11 , appare che un osservatore nel sistema di quiete misuri la
velocità della luce
√
′
c = c 1 − v 2 /c2
Secondo Einstein tuttavia, si deve ancora tenere conto della dilatazione del tempo, in base
′
′
alla quale per il tempo t in F si ha
√
′
t = t 1 − v 2 /c2
11
M. Abraham, Theorie der Elektrizität, Vol. 2, Leipzig 1908
26
′
′
cosicché infine ct1 = ct2 = 2l0 . Il punto di vista di Abraham è dunque in accordo con
l’esperienza di MM ma è in contrasto con il principio di relatività, a meno che non si
ammetta la dilatazione del tempo.
1.7
Esperienze moderne
A parte l’esperimento del ’64 (T. S. Jaseja et al., Phys. Rev. 133, A1221 (1964)), la
versione moderna dell’esperimento di MM usa frequenze di risonanza in cavità ottiche
criogeniche. Le frequenze di risonanza sono della forma νcav = nc/L, dove L è la lunghezza della cavità risonante e n = 1, 2, 3, . . . . Dunque una violazione dell’isotropia di
c, per esempio, può essere rivelata ruotando la cavità e misurando lo spostamento delle
frequenze. In questo modo si è stabilito il bound più preciso oggi noto12
∆cθ
< 10−15
c
dove
1
cθ /c = 1 + ( + δ − β)(v/c)2 sin2 θ + (β − α − 1)(v/c)2
2
parametrizza la dipendenza della velocità della luce dall’angolo tra la direzione di propagazione e la velocità dell’apparato rispetto al sistema assoluto (preferred ether frame),
nello schema di Mansouri-Sexl13 . In esperimenti recenti di Hills, Hall e Lipa et al.14 i
parametri α + 1/2, β − 1/2, δ risultano nulli a meno di una parte in 109 !
12
H. Müller, S. Herrmann, C. Braxmaier, S. Schiller and A. Peters, Phys. Rev. Lett. 91, 020401 (2003).
R. M. Mansouri and R. U. Sexl, Gen. Rel. Grav. 8, 515 (1977).
14
D. H. Hills and J. H. Hall, Phys. Rev. Lett. 64, 1697 (1990); J. A. Lipa, J. A. Nissen, S. Wang, D.
A. Stricker, and D. Avaloff, Phys. Rev. Lett. 90, 060403 (2003).
13
27
Capitolo 2
Le basi della relatività speciale
Il persistente fallimento dei tentativi di rilevare una qualsiasi influenza del moto della terra sulla propagazione della luce1 è ovviamente incompatibile con l’esistenza di un “etere
imponderabile” e conduce alla conclusione “altamente probabile, se non certa” (W. Pauli), che tutte le leggi della fisica, inclusa l’elettrodinamica, obbediscano al principio di
relatività.
2.1
Gli assiomi di Einstein
Fu A. Einstein che introdusse questo punto di vista relativistico moderno come il primo di
due assiomi, il secondo dei quali, “solo apparentemente incompatibile con il primo”, stabilisce inoltre che la velocità della luce sia la stessa in tutti i sistemi di riferimento inerziali.
A questo proposito, si può osservare che le equazioni di Maxwell predicono che la velocità
della radiazione elettromagnetica nel vuoto sia indipendente dal moto macroscopico della
sorgente, e l’esperimento di Michelson e Morley è compatibile con questo fatto con una
precisione del secondo ordine in v/c. L’astronomo de Sitter ha osservato che l’assenza di
immagini stellari multiple nei sistemi binari è un’elegante conferma di questo fatto.
Tuttavia essa potrebbe ancora dipendere da termini di ordine superiore in v/c, che sfuggono all’osservazione. È molto più semplice assumere, con Einstein, che la velocità della
luce nel vuoto sia del tutto indipendente dal moto della sorgente e dell’osservatore.
È interessante citare direttamente Einstein2
P1 Le leggi secondo le quali si modificano gli stati dei sistemi fisici sono
indipendenti dal fatto che questi cambiamenti di stato vengano riferiti all’uno
o all’altro di due sistemi di coordinate che si trovino in relativa reciproca
traslazione uniforme.
P2 ogni raggio di luce si muove nel sistema di coordinate “in quiete” con
la determinata velocità V , indipendente dal fatto che quel raggio di luce sia
1
Si ricordi che la precisione delle misure era del secondo ordine in v/c.
La traduzione è di P. Straneo, per il volume Cinquant’anni di Relatività, Ed. Giustine e Sansoni,
Firenze, 1955. Si veda anche la collezione di articoli in [2].
2
28
emesso da una sorgente in quiete, o da una sorgente in movimento (al giorno
d’oggi la V di Einstein si indica con c).
Da P1, nel sistema mobile in cui la sorgente è ferma la velocità è ancora c, cosicché si
potrebbe enunciare P2 nella versione equivalente
P3 la velocità della luce nel vuoto ha lo stesso valore in tutti i sistemi di
riferimento inerziali, in ogni direzione, tempo e luogo.
2.1.1
Osservazioni sui postulati
(i) Il principio di relatività P1 da solo non è sufficiente a determinare un gruppo univoco
di trasformazioni delle coordinate spazio-temporali. Infatti la meccanica newtoniana è
covariante rispetto al gruppo di Galilei, mentre la meccanica relativistica lo è rispetto al
gruppo di Lorentz.
Come ha mostrato Einstein però, gli assiomi P1 e P2 (o P3) sono sufficienti a determinare
il gruppo di simmetria senza bisogno di assumere valida in tutti i sistemi inerziali l’intera
teoria elettromagnetica di Maxwell, una semplificazione, questa, assai ragguardevole. Le
equazioni della meccanica invece, invarianti galileiane, dovranno essere riformulate in
modo tale da renderle compatibili con la nuova simmetria. La meccanica relativistica che
ne risulta differisce molto poco da quella newtoniana3 ma è indispensabile, per esempio,
a trattare le particelle veloci che viaggiano nei moderni acceleratori di particelle e alcuni
fenomeni di astrofisica relativistica, e ha collezionato numerose verifiche sperimentali.
(ii) Il carattere non ovvio del primo postulato, cioè del principio di relatività, si può
apprezzare considerando il fatto che, in base ad esso, il moto uniforme del centro di
massa dell’universo rispetto a un sistema qualunque non dovrebbe produrvi alcun effetto
osservabile. Evidentemente nessuno è in grado di verificare una simile asserzione e dunque,
se non vogliamo introdurre elementi metafisici nella meccanica, il principio di relatività
ha un preciso significato fisico solo per i sistemi isolati.
Il problema è quando si può dire che un sistema è isolato. L’esperienza mostra che per il
moto uniforme è sufficiente assumere che tutte le masse siano sufficientemente distanti, ma
che non può dirsi altrettanto per il moto accelerato. Nei sistemi accelerati appaiono infatti
campi di forza apparentemente privi di cause4 , e che per tale motivo Newton ricondusse
agli effetti dell’accelerazione assoluta, riferita cioè allo spazio assoluto. È assai probabile
che i campi inerziali dipendano invece dall’accelerazione rispetto “alla massa della terra
e degli altri corpi celesti” (espressione usata da Mach), la sola che ha significato fisico,
secondo Mach, e in ogni caso la sola che si può osservare.
(iii) Il ruolo principale dell’assioma P2, con il suo riferimento esplicito alla velocità della
luce, non è tanto quello di suggerire un ruolo speciale o privilegiato del campo EM in
natura, quanto quello di stabilire l’esistenza di una velocità limite insuperabile. Infatti dei
Le correzioni sono tutte di ordine v 2 /c2 , che è indubbiamente il motivo per cui non state scoperte
prima.
4
Quali, e dove, sarebbero le sorgenti?
3
29
due casi, che una velocità limite esista, o che non esista, solo il primo implica la simmetria
di Lorentz. Ma il valore della velocità limite, che proprio in virtù di tale proprietà deve
essere la stessa in tutti i sistemi di riferimento, non è fissato da questo argomento. Il
secondo postulato fissa precisamente questo valore, riconducendolo alla velocità della luce
nel vuoto.
Nel seguito ci proponiamo di determinare il gruppo di trasformazioni delle coordinate
spaziali e temporale che è in accordo con questo assioma, e di ripristinare cosı́ quel principio di relatività che nell’elettrodinamica di Maxwell-Lorentz sembrava perso. È un punto
centrale dell’analisi di Einstein che per fare questo è innanzitutto necessario definire in
maniera precisa come si determinano tali coordinate; si può infatti notare che le equazioni
della fisica, quali le equazioni del moto di Newton o le equazioni differenziali del campo
elettromagnetico, hanno un preciso significato fisico solo se le coordinate stesse sono precisamente definite. Ciò si ottiene dando alle coordinate spazio-temporali una definizione
di tipo operazionale, cioè data in termini di operazioni eseguibili in un laboratorio.
2.1.2
La definizione del tempo
Il problema spinoso è come confrontare il tempo di eventi che accadono in luoghi diversi.
Il problema sorge perché se le leggi fisiche sono locali e la velocità dei segnali è limitata, la
definizione del tempo comune a eventi in luoghi diversi necessita di una convenzione per
sincronizzare gli orologi. Ad esempio, per stabilire se due orologi identici separati da una
certa distanza indicano lo stesso tempo, si può inviare un raggio di luce dal primo verso
il secondo e regolare quest’ultimo in base al ritardo dovuto alla velocità di propagazione
finita del segnale. Ma questa procedura richiede ovviamente che si conosca il valore della
velocità della luce5 ; in altri termini, la velocità della luce deve essere nota se vogliamo
sincronizzare gli orologi, benché si richiedano orologi preventivamente sincronizzati per
determinare la velocità della luce. Anche il trasporto di un orologio da un punto all’altro
incontra la stessa difficoltà; per correggere i possibili effetti del trasporto, si deve disporre
di orologi preventivamente sincronizzati. I tempi degli eventi, pertanto, non possono
essere confrontati prima che si sia stabilita una procedura operativa per sincronizzare gli
orologi, ossia prima che si sia stabilito che cosa si intende per tempo comune a eventi
distanti.
Secondo il metodo di Einstein, il tempo comune di due eventi A e B può essere definito
quando si stabilisca, per definizione, che il tempo che la luce impiega per viaggiare da
A a B è uguale al tempo che impiega per tornare da B ad A. Quindi se il raggio parte
all’istante tA da A, giunge in B all’istante tB (misurato “vicino ” a B), e ritorna in A
′
all’istante tA (misurato vicino ad A), si avrà l’equazione6
′
tA − tB = tB − tA
(1.1)
5
Ricordiamo qui che la velocità della luce si può determinare con misure puramente elettromagnetiche.
′
′
un caso più generale si ha ponendo tA − tB = tB − tA , dove si assume che la partenza del segnale da
B non coincida necessariamente con il suo arrivo da A.
6
30
Diremo che i due orologi sono sincronizzati se questa relazione è valida. Con questo si è
innanzitutto definito un criterio per decidere quando due orologi distanti sono sı́ncroni, ma
non solo. Dall’uguaglianza dei tempi di andata e ritorno del segnale si deduce l’uguaglianza
della velocità della luce all’andata con la velocità della luce al ritorno, cioè, detta LAB la
distanza tra A e B, si ha
c=
LAB
LAB
= ′
tB − tA
tA − tB
(1.2)
Questo fatto non è dunque oggetto di verifica sperimentale. Con questo si assume però
che la velocità della luce sia la stessa per tutte le coppie di orologi sincronizzati, un dato
che non segue logicamente dalla definizione di Einstein. Si noti anche che la definizione
di Einstein non dipende dal valore numerico di c.
Segue anche dalla (1.2) che
c=
2LAB
tA − tA
(1.3)
′
anche se questa non è propriamente la definizione cinematica usuale della velocità. Tuttavia questa è la velocità della luce misurata in esperimenti a là Fizeau, e la (1.3) può
considerarsi un’acquisizione sperimentale. Dalla (1.2) si vede che se un segnale elettromagnetico parte da un orologio nel punto A al tempo tA , e arriva in B al tempo tB di un
orologio sincronizzato con A, si ha
tB = tA +
LAB
c
(1.4)
Volendo, si può usare questa relazione per regolare gli orologi, purché si conosca il valore
di c. Per questo la definizione originale di Einstein ci sembra quella logicamente più
semplice.
Se un raggio luminoso segue un percorso poligonale chiuso con lati li , si può misurare il
tempo di volo con un unico orologio; se
∑
li
c=
(1.5)
T
allora si può mostrare che un orologio in A è sincronizzato con orologi identici posti in B
e in C se e solo se questi sono sincronizzati tra loro. D’altronde la (1.5) può considerarsi
un’acquisizione sperimentale sin dai tempi di Fizeau, e il metodo di Einstein è quindi
libero da contraddizioni logiche.
Il tempo comune di eventi distanti è adesso definito da orologi sincronizzati posti nelle
immediate vicinanze degli eventi, trascurando l’inesattezza che deriva dal fatto che gli
orologi non coincidono esattamente con gli eventi; in particolare gli eventi A e B si
diranno simultanei (o contemporanei) se gli orologi suddetti indicano lo stesso tempo.
La procedura descritta deve essere applicata a tutti i sistemi di riferimento inerziali, con
gli orologi in quiete nei rispettivi sistemi. Ogni riferimento inerziale avrà quindi il suo
proprio tempo, definito da orologi sincronizzati che occupano posizioni fisse, e in tali
31
sistemi la velocità della luce risulterà per definizione costante, isotropa e numericamente
uguale a c. Non è detto, a priori, che questi tempi concordino per tutti gli osservatori
inerziali.
Osservazioni
Sin dall’inizio la procedura di sincronizzazione di Einstein è stata oggetto di analisi teoriche dettagliate, perché si riconosce in essa un certo grado di convenzionalità. Per gli
interessati, i lavori classici che analizzano questo grado di convenzionalità sono dovuti a
Robertson[10] e ai già citati Mansouri e Sexl[11]. L’aspetto più interessante dei lavori
di Robertson, Mansouri e Sexl è l’identificazione dei tre parametri delle trasformazioni
di coordinate che descrivono le varie convenzioni di sincronizzazione degli orologi. Si è
mostrato cosı̀ che esiste una sincronizzazione che mantiene il carattere assoluto della simultaneità, ma che tuttavia produce una teoria cinematicamente equivalente alla relatività
ristretta. Ovviamente si tratta di una definizione operativa differente della simultaneità.
In particolare, in quella teoria due raggi di luce emessi da eventi contemporanei secondo
la nuova definizione non si incontreranno nel punto di mezzo.
2.2
Le trasformazioni di Lorentz
Data la definizione del tempo in un sistema inerziale, passiamo ora a determinare il gruppo
di trasformazioni delle coordinate spazio-temporali che è in accordo con questa definizione
e con il principio di relatività.
2.2.1
Condizioni sulle trasformazioni
È conveniente introdurre la notazione xa , a ∈ {0, 1, 2, 3}, per indicare le coordinate, con
la corrispondenza x0 = ct, x1 = x, x2 = y, x3 = z. Le trasformazioni richieste devono
avere la proprietà di conservare i moti uniformi e dunque hanno la forma
′a
x =
3
∑
Lab xb + β a
(2.1)
a=0
La parte non omogenea descrive evidentemente le traslazioni di tempo e spazio, xa →
xa + β a , o anche,
′
t = t + β 0 /c,
′
x =x+β
che non cambiano la velocità relativa e sono anche simmetrie galileiane. Nel seguito considereremo solo le trasformazioni omogenee, corrispondenti fisicamente a trasformazioni
′
fra riferimenti con origini coincidenti al tempo comune t = t = 0.
L’assioma P 2 significa che l’equazione di un fronte d’onda sferico in F, cioè il cono di
equazione
−c2 (t − t0 )2 + (x − x0 )2 + (y − y0 )2 + (z − z0 )2 = 0
32
(2.2)
′
è la stessa che per il fronte d’onda in F ,
′
′
′
′
′
′
′
′
−c2 (t − t0 )2 + (x − x0 )2 + (y − y0 )2 + (z − z0 )2 = 0
(2.3)
e il problema è ora quello di trovare le trasformazioni di coordinate che hanno questa
proprietà. Ma con trasformazioni lineari, questo è possibile solo se (v. appendice)
′
′
′
′
′
′
′
′
−c2 (t − t0 )2 + (x − x0 )2 + (y − y0 )2 + (z − z0 )2
[
]
= λ2 −c2 (t − t0 )2 + (x − x0 )2 + (y − y0 )2 + (z − z0 )2
(2.4)
dove λ è in generale una funzione della matrice di trasformazione Lab . Applicando due
trasformazioni in successione, si ottiene anche7
′
′
λ(L)λ(L ) = λ(LL )
(2.5)
È conveniente scrivere la condizione di invarianza in forma concisa, nello spirito dell’Eq. (2.1). Introduciamo la matrice, detta metrica di Minkowski,
−1 0 0 0
0 1 0 0
(2.6)
ηab =
0 0 1 0
0 0 0 1
La (2.4) si può scrivere nella forma
3
∑
′
′
′
′
ηab (x − x0 ) (x − x0 ) = λ
a
b
2
3
∑
ηab (x − x0 )a (x − x0 )b
(2.7)
a,b=0
a,b=0
Chiameremo l’espressione
∆s2 =
3
∑
ηab (x − x0 )a (x − x0 )b
(2.8)
a,b=0
l’intervallo spazio-temporale tra i due punti x e x0 ; diremo anche che ciascuno di essi
definisce le coordinate spazio-temporali di un evento.
Si può vedere che di tutte le trasformazioni lineari che soddisfano la (2.7), le dilatazioni,
o trasformazioni di scala,
′
x a = λxa ,
λ > 0,
sono le uniche per cui λ(L) ̸= 1. Per cominciare, la validità della (2.4) per tutti i punti è
possibile solo se
∑
(2.9)
ηab Lac Lbd = λ2 ηcd
a,b
7
Dal punto di vista matematico questa condizione definisce una rappresentazione irriducibile
unidimensionale del gruppo di simmetria.
33
Allora la matrice Λab = λ−1 Lab soddisfa la condizione di invarianza stretta, quella cioè con
λ = 1. In definitiva:∑ogni trasformazione lineare delle coordinate che preserva la forma
quadratica (x, y) = ab ηab xa y b a meno di un fattore di scala moltiplicativo, è della forma
′
x a = λΛab xb + β a
(2.10)
Le matrici Λab formano un gruppo di trasformazioni detto il gruppo di Lorentz; la sua
caratteristica è di lasciare invariata la forma quadratica, e dunque in particolare il cono
luce.
′
Oltre alle traslazioni spazio-temporali, x b = xb + ab , semplici trasformazioni che lasciano
invariato il cono luce sono le trasformazioni ortogonali delle coordinate (le familiari rotazioni), definite dalla condizione che in almeno un sistema di riferimento esse assumano la
forma
′i
x =
3
∑
Ri j xj ,
′
ct = ct
j=1
e le già citate trasformazioni di scala (dette anche dilatazioni), che come le rotazioni sono
lineari e omogenee ma non cambiano la velocità relativa dei sistemi di riferimento. Le
simmetrie di rotazione e traslazione corrispondono all’isotropia e omogeneità dello spazio,
e sono associate a importanti leggi di conservazione, sperimentalmente verificate. Le
trasformazioni di scala, invece, non sono simmetrie esatte delle leggi naturali8 .
Se λ e Λ fossero indipendenti allora L’Eq. (2.10) descriverebbe una dilatazione seguita da
una trasformazione di Lorentz (o viceversa). Resta aperta la possibilità che λ = λ(Λ),
′
′
nel qual caso λ(Λ)λ(Λ ) = λ(ΛΛ ); se Λ = R è una rotazione, nel senso che R00 = 1,
Ri0 = R0i = 0 e Rji è una matrice ortogonale, allora richiediamo senz’altro che λ(R) = 1:
per esempio, nel caso di una rotazione di angolo ϕ attorno all’asse z, la funzione λ(ϕ)
dovrebbe soddisfare λ(ϕ1 + ϕ2 ) = λ(ϕ1 ) + λ(ϕ2 ). L’unica possibilità è λ(ϕ) = exp(cϕ),
che però non è periodica. In effetti l’unica funzione reale continua λ(R) sul gruppo delle
rotazioni tale che λ(R1 R2 ) = λ(R1 )λ(R2 ) è il determinante, ma per le rotazioni det[R] = 1.
Il caso più generale sarà discusso nella prossima sezione9 .
2.2.2
Trasformazioni di Lorentz speciali, o boosts
Consideriamo il caso semplice di due riferimenti in moto relativo uniforme lungo l’asse
′
comune x, e coincidenti nell’istante iniziale t = t = 0. Usando la seguente proprietà delle
funzioni iperboliche,
(cosh ψ)2 − (sinh ψ)2 = 1
8
Occorre precisare che le dilatazioni non modificano le masse o le costanti di accoppiamento delle
interazioni, e che quindi non corrispondono a cambiamenti nelle unità di misura. L’invarianza di scala
è quindi possibile solo se tutte le masse sono nulle o formano uno spettro continuo, e le costanti di
accoppiamento sono numeri puri.
9
Vale la pena ricordare che anche per il gruppo di Lorentz vale l’affermazione che l’unica rappresentazione reale unidimensionale è quella triviale: λ(Λ) = 1. Questo renderebbe superflua ogni altra
discussione.
34
si verifica subito che la condizione di invarianza stretta (2.7) è soddisfatta da una “rotazione iperbolica” del tipo
′
ct = ct cosh ψ − x sinh ψ
(2.11)
′
x = −ct sinh ψ + x cosh ψ
′
(2.12)
′
y =y
z =z
(2.13)
′
′
La (2.13) significa che un moto lungo x in F viene trasformato in un moto lungo x in F e,
viceversa, può essere derivata richiedendo tale proprietà. Per determinare ψ osserviamo
′
′
che il punto x = 0, cioè l’origine di F , deve muoversi di moto uniforme con velocità
v = (v, 0, 0); questo determina
tanh ψ =
v
c
(2.14)
Il parametro ψ denota propriamente la rapidità della trasformazione, dato che ψ → ∞
per v → c. Inoltre tanh ψ ≤ 1 implica necessariamente v ≤ c. Che debba essere v < c si
vedrà tra poco. Si noti anche l’analogia formale con le rotazioni. Siccome
cosh2 ψ =
1
1 − tanh2 ψ
si ha poi
cosh ψ = √
1
1−
v 2 /c2
sinh ψ = √
,
v
1 − v 2 /c2
A questo punto, le trasformazioni di Lorentz speciali prendono la forma
′
x =√
x − vt
(2.15)
1 − v 2 /c2
t − vx/c2
′
t =√
1 − v 2 /c2
′
y =y
(2.16)
′
z =z
(2.17)
Il “fattore gamma”
1
γ=√
1 − v 2 /c2
(2.18)
35
2n
z }| {
è onnipresente in relatività; una regola utile è che se v/c = 0, 99999...9 ... allora γ ≃ 10n .
La matrice corrispondente10 è
γ
−vγ 0 0
−vγ
γ
0 0
L(v) =
(2.19)
0
0
1 0
0
0
0 1
Ponendo momentaneamente γ ≡ γ(v) per indicare la dipendenza da v, è facile verificare
l’identità
(
′)
vv
′
γ(v)γ(v ) 1 + 2 = γ(w)
(2.20)
c
dove
′
v+v
w=
1 + vv ′ /c2
(2.21)
Questo significa che il prodotto di due trasformazioni di Lorentz collineari con velocità v
′
′
e v è una trasformazione di Lorentz con velocità w, cioè che L(v) · L(v ) = L(w).
′
Poniamo per semplicità di notazione λ(L(v)) = λ(v). Allora la (2.5) diventa, se anche v
è diretta secondo l’asse x,
′
λ(v)λ(v ) = λ(w)
e dato che λ(0) = 1, si deve avere λ(v)λ(−v) = 1. Sia Rπ una rotazione che inverte v:
Rπ v = −v. È facile vedere che L(−v) = Rπ L(v)Rπ (moltiplicate la matrice (2.19) per
quella che rappresenta Rπ ), e dunque che
λ(−v) = λ(Rπ )2 λ(v) = λ(v)
In conclusione si ha λ(v) = 1. Le formule inverse sono
′
′
x + vt
x= √
1 − v 2 /c2
y=y
′
′
z=z
(2.22)
′
(2.23)
′
t + vx /c2
t= √
1 − v 2 /c2
10
(2.24)
La numerazione di righe e colonne è nell’ordine 0, 1, 2, 3, ma certi autori usano invece 1, 2, 3, 0.
36
Figura 2.1: Sistemi in moto relativo uniforme
y
y’
v
x
x’
z
z’
Si noti che le trasformazioni di Lorentz si riducono a quelle di Galilei nel limite c → ∞.
Qui vediamo chiaramente la relatività della contemporaneità: in base a queste equazioni,
′
′
′
per due eventi simultanei (∆t = 0) ma separati spazialmente (∆x ̸= 0) in F , si ha
∆t =
v
∆x
c2
(2.25)
in F . Come anche nella simmetria galileiana, la coincidenza spaziale di eventi separati nel
tempo è relativa. Ma diversamente che dal caso galileiano, è relativa anche la coincidenza
temporale di eventi separati nello spazio. In relatività ristretta, solo alla coincidenza
spazio-temporale si può attribuire un carattere assoluto (cioè indipendente dal sistema di
coordinate).
Le trasformazioni di Lorentz speciali si possono scrivere in forma vettoriale
′
t = γ(t − v · x/c2 ),
′
x = x + (γ − 1)
1
γ=√
1 − v 2 /c2
x·v
v − γvt
v2
(2.26)
(2.27)
e valgono anche se la velocità relativa non è diretta lungo un asse cartesiano. Dato che
le formule dipendono solamente da v, si può pensare che definiscano una trasformazione
di Lorentz pura, senza rotazione. Si noti che vale ancora λ(v) = 1. Se i riferimenti F
′
e F sono∑
connessi da una rotazione R, come nella (3.3), allora nell’Eq. (2.27) occorre
′
′
sostituire 3j=1 Rij · xj al posto di xj .
37
2.2.3
La più generale trasformazione di Lorentz
Allo scopo di descrivere trasformazioni più generali, riprendiamo la metrica di Minkowski11
(2.6)
−1 0 0 0
0 1 0 0
ηab =
0 0 1 0
0 0 0 1
Come abbiamo visto, si può scrivere l’intervallo spazio-temporale nella forma
2
∆s =
3
∑
ηab ∆xa ∆xb ,
∆xa = xa − xa0
(2.28)
a=0
Possiamo pensare alle grandezze xa e xa0 come alle coordinate di punti in uno spazio
vettoriale quadri-dimensionale detto spazio-tempo di Minkowski12 , o più semplicemente
spazio-tempo, i cui punti rappresentano gli eventi. L’espressione (2.28) definisce l’intervallo spazio-temporale tra due eventi, invariante di Lorentz. La formula (2.28) definisce
anche un prodotto scalare con metrica ηab , cioè la forma quadratica
(x, y) =
3
∑
ηab xa y b
(2.29)
a=0
è evidentemente bilineare e non degenere13 . Ma si noti che non è definita positiva. La
condizione di invarianza dell’intervallo prende la forma
3
∑
Λac Λbd ηcd = ηab
(2.30)
c,d=0
e identifica le trasformazioni di Lorentz come il gruppo delle isometrie della metrica ηab . Si
noti che la (2.30) implica det[Λ] = ±1. Si osservi anche che dalla (2.30) segue l’invarianza
del prodotto scalare
(x, y) = −x0 y 0 + x1 y 1 + x2 y 2 + x3 y 3
(2.31)
per ogni coppia di punti x, y. Vogliamo ora mostrare che le trasformazioni speciali discusse sopra essenzialmente esauriscono le trasformazioni di Lorentz. Consideriamo una
trasformazione di Lorentz generica
′a
x =
3
∑
Λab xb
a=0
11
Quanto segue è un piccola anticipazione del formalismo quadri-dimensionale.
Hermann Minkowski (1864-1909), a cui si deve la formulazione quadri-dimensionale della teoria della
relatività.
13
(x, y) = 0 per ogni y se e solo se x = 0.
12
38
e applichiamola al vettore14 ζ a = (1, 0, 0, 0), tale che (ζ, ζ) = −1. Si otterrà un vettore
della forma
Λ · ζ = (x, x)
dove −x2 + |x|2 = −1 perché le trasformazioni di Lorentz preservano il prodotto scalare.
Sia R una rotazione che riporta il vettore ottenuto lungo l’asse x,
R · Λ · ζ = (x, |x|, 0, 0)
Siccome |x| < x, possiamo porre u = c|x|/x < c e applicare il boost L(u); si trova
L(u) · R · Λ · ζ = (1, 0, 0, 0) = ζ
Segue da questo che L(u) · R · Λ ≡ R̄ è una rotazione spaziale. Dunque, poiché L(u)−1 =
L(u), si ha
Λ = R−1 · L(−u) · R̄
(2.32)
Si noti che questa trasformazione ha determinante 1. Vediamo da qui che la più generale
trasformazione di Lorentz propria (det Λ = 1) e ortocrona (Λ00 ≥ 1) è il prodotto di due
rotazioni con una trasformazioni di Lorentz speciale.
Possiamo ora completare la dimostrazione del fatto accennato che λ(Λ) = 1 è l’unico
fattore di scala ammesso: sappiamo che λ(R) = 1 per le rotazioni, e abbiamo visto sopra
che λ(L(u)) = 1 anche per i boosts. Dunque
′
′
λ(Λ) = λ(R−1 · L(−u) · R ) = λ(R−1 )λ(L(−u))λ(R ) = 1
E15: Perché una trasformazione di Lorentz che preserva ζ deve essere una rotazione?
2.3
Lunghezze e intervalli di tempo
Dalle trasformazioni di Lorentz (2.15), ((2.17)), ((2.16)), si ricava che un regolo (asta rigida) in moto con velocità v in un riferimento F , avente lunghezza propria L0 (la lunghezza
′
nel riferimento F nel quale il regolo è in quiete), ha lunghezza
√
v2
L = L0 1 − 2
(3.1)
c
se misurata inF . Il risultato dipende dalle trasformazioni di Lorentz e dal fatto che la
misura di L richiede che le posizioni degli estremi del regolo siano determinate simultaneamente in F . Allora dalla prima delle (2.15) segue che per eventi simultanei in F (∆t = 0)
′
si ha L0 = ∆x = γ∆x = γL. Si può anche calcolare direttamente ∆x: in questo caso
′
′
∆x = γ(∆x − v∆t )
14
che rappresenta un secondo-luce trascorso nell’origine delle coordinate.
39
′
Ma eventi simultanei in F non lo sono in F , e infatti si ha
v
′
′
∆t = 2 ∆x
c
′
Eliminando ∆t si riottiene la (3.1). Vediamo che la formula della contrazione dipende solo
dalla simmetria di Lorentz e non richiede alcuna ipotesi sulla struttura della materia. Essa
si deve considerare come una proprietà elementare del gruppo di Lorentz non deducibile
da concetti più elementari.
Per le applicazioni è necessario estendere la formula della contrazione ai moti accelerati,
ma per questo serve la seguente assunzione addizionale: la lunghezza di un elemento dℓ
di lunghezza è connesso all’elemento di lunghezza proprio dℓ
√0 , misurato nel SI momentaneamente in quiete col regolo, dalla formula (3.1): dℓ = 1 − v 2 /c2 dℓ0 . Dunque, per
esempio, dal punto di vista dell’equipaggio di un’astronave che viaggia dalla terra verso
Vega (a 26 anni luce) in linea retta, con velocità v(x) misurata in anni-luce/anno, la
distanza percorsa sarà
∫ 26 √
L (anni − luce) =
1 − v(x)2 dx
0
Se il moto è iperbolico (v. più avanti) si ha
razione misurata15 in anni-luce/anni2
√
1 − v(x)2 = (1 + gx)−1 , dove g è l’accele-
E16: Si calcoli la distanza per raggiungere Vega se g è l’accelerazione di gravità terrestre,
circa 9, 8 m/s2 .
E17: Si mostri che la lunghezza di un regolo mobile posto “di traverso” alla direzione del
moto è data dalla formula
L= √
L0 γ −1
1 − β 2 sin2 θ
dove θ è l’angolo del regolo con la direzione del moto.
L’assunzione fatta poggia la ragione sul fatto che è sempre possibile, in linea di principio,
correggere gli effetti dell’accelerazione sui regoli, e nessun esperimento noto la contraddice. Naturalmente, accelerazioni troppo elevate non possono essere applicate a oggetti
macroscopici per ragioni strutturali.
Simili considerazioni si possono fare riguardo al comportamento di orologi in movimento.
In tal caso l’intervallo di tempo proprio τ (il tempo indicato dall’orologio nel suo sistema
di quiete) è connesso all’intervallo T misurato in F dalla formula
√
v2
τ =T 1− 2
(3.2)
c
dove v è la velocità dell’orologio in F . Infatti, dalla seconda delle (2.16), segue che per
′
eventi spazialmente coincidenti in F (le posizioni successive delle lancette dell’orologio
15
Per esempio, se g = 980 cm/sec2 è la gravità terrestre si ha g = 1, 028 anni − luce/anni2 .
40
′
′
fermo in F ), si ha T = γT ≡ τ . Si vede da qui che l’orologio in movimento ritarda
rispetto agli orologi in quiete.
Come per i regoli, anche per gli orologi faremo l’assunzione extra che gli effetti dell’accelerazione si possano correggere. Il tempo proprio di un orologio in movimento lungo una
curva arbitraria si calcola allora con l’integrale
∫ T√
τ=
1 − v(t)2 /c2 dt
(3.3)
0
I limiti di integrazione si possono ovviamente cambiare. Per esempio, nel moto iperbolico
si ha
gt
v(t) = √
1 + g 2 t2 /c2
E17: Si calcoli il τ per raggiungere Vega se g è l’accelerazione di gravità terrestre, circa
9, 8 m/s2 . Che valore si deve prendere per T ?
Nota- Non discutiamo qui le verifiche sperimentali della formula importante (3.2), in
quanto le innumerevoli verifiche sperimentali dell’invarianza di Lorentz oggi disponibili
sono anche una verifica della dilatazione temporale e della contrazione delle lunghezze (che,
peraltro, non è mai stata osservata direttamente, cioè mediante regoli in moto). Tuttavia
la (3.2) ha un’applicazione immediata alla vita media delle particelle elementari instabili:
la vita media di particelle veloci si allunga del fattore γ. Per questo i muoni prodotti
negli strati alti dell’atmosfera dall’urto con i raggi cosmici arrivano a terra nonostante la
breve vita media di circa 2, 2 µs. La formula relativistica è stata confermata osservando
il decadimento di muoni ultra-relativistici, aventi γ ≃ 30 (con che velocità si spostano i
muoni con tale γ?), negli anelli di accumulazione del CERN, con precisione di livello 10−3 .
2.4
L’addizione delle velocità
La traiettoria di una particella in moto è descritta in F dalla funzione vettoriale x(t), e
′
′
′
in F da x (t ). Dalle trasformazioni di Lorentz si ricava facilmente
√
√
2
v2
u y 1 − c2
uz 1 − vc2
ux − v
′
′
′
,
uy =
,
uz =
(4.1)
ux =
1 − ux v/c2
1 − ux v/c2
1 − ux v/c2
In forma vettoriale
′
u =
u + (γ − 1)(u · v)v/v 2 − γv
γ(1 − u · v/c2 )
′
(4.2)
′
u + (γ − 1)(u · v)v/v 2 + γv
u=
γ(1 + u′ · v/c2 )
(4.3)
41
′
Orientiamo l’asse z in modo tale che uz = 0. Allora anche uz = 0 e dalla (4.1) segue
√
sin θ 1 − v 2 /c2
′
tan θ =
(4.4)
cos θ − v/u
Dalla (4.2) si trova
(
)1/2 (
)−1
v
v2 v2
uv
2
u = u 1 − 2 cos θ + 2 − 2 sin θ
1 − 2 cos θ
u
u
c
c
′
dove θ è l’angolo fra u e v. Introducendo il versore e nella direzione di u, e risolvendo
rispetto ad u, si ottiene la formula
√
[
′
′
′
′ ]1/2 ′
v · e(1 − u 2 /c2 ) + 1 − v 2 /u 2 + (1 − u 2 /c2 )(v · e)2 /u 2
u 1 − v 2 /c2
u=
(4.5)
1 − v 2 /c2 + (1 − u′ 2 /c2 )(v · e/c)2
′
Si noti che u = c se e solo se u = c, indipendentemente dalla direzione del moto.
′
Presentano interesse le formule di trasformazione dell’accelerazione nel caso che F sia
un sistema momentaneamente in quiete con la particella; differenziando le (4.1) nelle
′
′
′
componenti della velocità e ponendo successivamente ux = uy = uz = 0 e v = u, si
ottengono facilmente le formule volute
′
ax = (1 − β 2 )3/2 ax ,
′
ay = (1 − β 2 )ay ,
′
′
′
az = (1 − β 2 )az
(4.6)
′
dove β = u/c, ax = dux /dt, ax = dux /dt , eccetera. In forma vettoriale
(√
) a′ · u
2
a = (1 − β )a + (1 − β )
1−β −1
u
u2
2
′
2
(4.7)
Si possono scrivere le (4.6) nella forma suggestiva
(
)
d
u
′
√
=a
dt
1 − u2 /c2
′
Nel sistema istantaneamente in quiete vale la meccanica newtoniana cosicché a = F/m,
dove F è la forza, e la formula suggerisce allora che la definizione appropriata della quantità
di moto in relatività sia
mu
p= √
1 − u2 /c2
dove m è la massa a riposo della particella; ritorneremo sulla questione in seguito.
42
2.5
La luce nei dielettrici trasparenti
Usando le formule di trasformazione di Lorentz e la costanza di c nella condizione di invarianza della fase di un onda elettromagnetica piana, si trovano le formule di trasformazione
delle caratteristiche dell’onda valide nella teoria della relatività
1 − v cos θ/c
cos θ − v/c
′
′
′
′
′
ν =ν √
,
ν cos θ = ν √
,
ν sin θ = ν sin θ
(5.1)
2
2
2
2
1 − v /c
1 − v /c
′
′
dove θ e θ danno la direzione della normale all’onda in F e F rispettivamente. Si vede
che
√
sin θ 1 − v 2 /c2
′
tan θ =
(5.2)
cos θ − v/c
Questa formula è identica alla (4.4), dove si ponga u = c; cioè la direzione dei raggi di
luce si trasforma nello stesso modo della normale ai fronti d’onda, diversamente che nella
teoria dell’etere.
Se si introduce il vettore numero d’onde, k = (2πν/c)n, e si pone k 0 = 2πν/c, le formule
scritte indicano che le quattro grandezze (k 0 , kx , ky , kz ) si trasformano come le componenti
del vettore posizione di un evento, (x0 , x, y, z), dove si è posto x0 = ct. Infatti si può
scrivere la fase dell’onda nella forma
F = −k 0 x0 + kx x + ky y + kz z
da cui discende subito che F sarà invariante precisamente se le componenti k 0 e k si
trasformano come le componenti del vettore posizione x0 , x.
La velocità di gruppo, u, segue dalle formule scritte se si rammenta che
u=
∂ω
∂k
ω = 2πν
Con un calcoletto un pò più lungo che nel caso non relativistico, si ottiene
√
√
uy 1 − v 2 /c2
uz 1 − v 2 /c2
ux − v
′
′
′
ux =
,
uy =
,
uz =
1 − ux v/c2
1 − ux v/c2
1 − ux v/c2
cioè la stessa legge di composizione delle velocità che è valida per le particelle di massa
′
finita. Per un mezzo trasparente in quiete in F con indice di rifrazione n, la velocità
′
della luce in F è data dalla formula (4.5) con u = c/n, cioè
√
1/2
v · e(1 − 1/n2 ) + 1 − v 2 /c2 [1 − n2 v 2 /c2 + (1 − 1/n2 )(v · e)2 n2 /c2 ] c/n
u=
1 − v 2 /c2 + (1 − 1/n2 )(v · e/c)2
Al primo ordine in v/c si ritrova la formula di Fresnel (5.18)
(
)
c
1
u= + 1− 2 v·e
n
n
qui ottenuta senza fare ricorso all’ipotesi dell’etere.
43
2.5.1
Effetto Doppler e aberrazione secondo la relatività
′
L’effetto Doppler è contenuto nella (5.1): se la sorgente è in F , allora θ è l’angolo tra
la direzione del moto della sorgente e la direzione della luce in F e v cos θ = −vr , dove
vr è considerata positiva se la sorgente si allontana dall’osservatore. Si ottiene allora la
formula relativistica
√
1 − v 2 /c2
′
ν=ν
(5.3)
1 + vr /c
Si noti che secondo questa formula c’è un effetto Doppler anche quando vr = 0, ossia per
un puro moto trasverso.
L’aberrazione è contenuta nella (5.2) ( o nella (4.4), con u = c), valida per ogni coppia
′
di riferimenti inerziali. In particolare, se F è il sistema di quiete della sorgente e F
rappresenta un laboratorio terrestre nel suo moto attorno al sole, la direzione del raggio
′
′
′
in F è ϑ = π − θ, in F è ϑ = π − θ e dalla (5.2) si ottiene (A. Einstein, 1905)
√
sin ϑ 1 − v 2 /c2
′
tan ϑ =
(5.4)
cos ϑ + v/c
′
Introducendo l’angolo di aberrazione δϑ = ϑ − ϑ, al primo ordine in v/c si ha
v
δϑ = − sin ϑ
c
La discussione dell’aberrazione in relatività si è rivelata una questione assai delicata,
nonostante l’apparente semplicità del fenomeno. Ad esempio, la formula (5.4) si può
applicare ad una coppia qualsiasi di sistemi inerziali; si può allora notare che l’aberrazione
′
dipende solo dalla velocità relativa di F ed F , ed è quindi indipendente dalla velocità
′
della sorgente in F o in F . In ogni caso, se si riserva la designazione di aberrazione
stellare allo spostamento angolare delle stelle osservato dalla terra (il fenomeno osservato
e quantificato per la prima volta da Bradley) allora l’effetto si può certamente attribuire
al moto della terra rispetto alle sorgenti. Da questo punto di vista si può osservare che
l’aberrazione fornisce una prova diretta del moto della terra attorno al sole.
L’aberrazione diventa ovviamente significativa per velocità prossime a quella della luce.
Per esempio, in una ipotetica nave spaziale che viaggiasse attraverso la galassia con velocità prossima a c, tutte le stelle apparirebbero concentrate attorno alla direzione del moto
dell’astronave, e il resto del cielo sarebbe buio; si avrebbe inoltre una grande intensità
luminosa ultravioletta proveniente dalla direzione del moto, a causa dello spostamento
verso il blu della radiazione.
2.5.2
Onde di materia
È interessante ottenere il comportamento di onde diverse da quelle elettromagnetiche,
come ad esempio le onde di materia della teoria quantistica. La fase si scrive
(
)
x cos α + y sin α
F (t, x, y) = ν t −
w
44
dove w è la nuova velocità di fase. Dall’invarianza della fase si ottengono le formule di
facile dimostrazione
1 − v cos α/w
′
ν =ν √
,
1 − v 2 /c2
′
ν
ν cos α − vw/c2
′
√
cos
α
=
,
w′
w
1 − v 2 /c2
′
′
ν
ν
′
sin α
′ sin α =
w
w
′
dove come al solito α e α danno la direzione della normale all’onda in F e F rispettivamente. Si vede che
√
sin α 1 − v 2 /c2
′
tan α =
(5.5)
cos α − vw/c2
(
)−1/2
v2
2vw
v 2 w2
2
w = 1 − 2 sin α − 2 cos α + 4
(w − v cos α)
c
c
c
′
(5.6)
In base alla (5.5) una tale onda ha la stessa aberrazione di una particella con velocità
u=
c2
w
(5.7)
Questo fatto fu notato da De Broglie che ne diede la seguente semplice interpretazione
fisica: se si vuole che E = ℏω e p = ℏk allora
w=
ω
E
c2
=
=
|k|
|p|
u
perché in relatività (come vedremo) E = γmc2 e p = γmu.
45
Capitolo 3
Formalismo quadridimensionale ed
equazioni invarianti
Come abbiamo anticipato, le quattro coordinate di un evento in un sistema di riferimento
′
inerziale identificano un punto dello spazio-tempo. Ad ogni sistema F , F ,. . . , è associato
′
il proprio sistema di coordinate {xa }, {x a }, . . . , per mezzo del quale si possono identificare gli eventi, e le trasformazioni di Lorentz sono allora interpretabili come applicazioni
lineari operanti sullo spazio di Minkowski. Si noti che i quattro numeri xa , a ∈ {0, 1, 2, 3},
definiscono ciò che in algebra si chiama un quadri-vettore, o più semplicemente un vettore. È tipico delle componenti dei vettori trasformarsi linearmente per effetto di una
“rotazione” dei vettori di base. Nel seguito, useremo alcune lettere della parte centrale
dell’alfabeto latino, quali i, k, j, l, m, n, . . . , per indicare le componenti spaziali dei vettori.
Le lettere a, b, c, d, . . . denotano indici quadri-dimensionali.
Sottolineiamo il fatto essenziale che le coordinate devono essere definite operativamente.
Ad esempio, il tempo di ogni evento è indicato da un orologio “vicino” all’evento e sincronizzato agli altri orologi dalla procedura indicata precedentemente, mediante l’invio di
segnali elettromagnetici. Non è affatto scontato che lo spazio-tempo, inteso come l’insieme di tutti gli eventi, abbia la struttura di spazio vettoriale caratteristica della relatività
speciale, nè questa struttura deriva logicamente dalla sua definizione euristica di “insieme
di tutti gli eventi”. Tuttavia questo è ciò che si osserva localmente.
3.1
Prodotto scalare
Abbiamo anche visto che le trasformazioni di Lorentz non cambiano il valore della forma
quadratica (x0 = ct) che rappresenta l’intervallo spazio-temporale tra due eventi
Ds = −(x − y ) +
2
0
0 2
3
∑
(xi − y i )2
(1.1)
i=1
46
Indicheremo il secondo membro di questa equazione con la notazione propria delle forme
bilineari, (x − y, x − y), dove
(x, y) = (y, x) = −x0 y 0 +
3
∑
xj y j
j=1
Si ha allora
(x − y, x − y) = (x, x) + (y, y) − 2(x, y)
Usando la metrica diagonale ηab = ηba , tale che η00 = −1, ηik = δik , si può scrivere
(x, y) =
3
∑
ηab xa y b
(1.2)
a,b=0
Questa forma quadratica bilineare definisce nello spazio di Minkowski un prodotto scalare
non degenere, che però non è definito positivo. Per analogia con il caso euclideo, ηab si
chiama il tensore metrico o, più semplicemente, la metrica di Minkowski. Si noti che
mentre l’indice di xa è (convenzionalmente) posto in alto, gli indici della metrica sono
in basso; la ratio è nel fatto che la forma (x, y) è invariante di Lorentz, e diverrà chiara
quando discuteremo gli invarianti. En passant, gli indici in alto si dicono “controvarianti”,
quelli in basso “covarianti”.
Nel seguito faremo uso della convenzione di Einstein degli indici ripetuti, secondo la
quale in un prodotto in cui figurano coppie di indici uguali, uno controvariante e l’altro
covariante, si sottintende che siano sommati sui loro valori 0, 1, 2, 3. Per esempio, la (1.2)
si scriverà più semplicemente nella forma
(x, y) = ηab xa xb
Infine useremo unità di misura in cui c = 1 e adimensionale, salvo avviso contrario. Per
esempio, la luce si sposta di 30 centimetri in un nanosecondo, quindi prendendo come
unità di tempo il nanosecondo (ns), e di spazio 30 cm (chiamiamolo nanospazio, o nsp),
si avrà che c = 1 nsp/ns, ma si noti che c non è adimensionale. Se invece stipuliamo che
1 sec = 2, 998 × 1010 cm si ha ancora c = 1, ma ora c è un numero puro.
3.2
Gruppo di Lorentz
Come abbiamo ricordato sopra, le trasformazioni di Lorentz lasciano invariato l’intervallo
spazio-temporale. Possiamo quindi definire queste trasformazioni come elementi del gruppo delle isometrie dello spazio di Minkowski, gruppo che indicheremo semplicemente con
il simbolo L. In altri termini, si tratta di trasformazioni di coordinate lineari e omogenee
′
xa → x a = Λab xb
(2.1)
47
che preservano il prodotto scalare
(Λx, Λy) = (x, y)
Essendo non degenere, questo è possibile se e solo se
ηab Λac Λbd = ηcd
(2.2)
Valgono le seguenti proprietà elementari:
• le trasformazioni di Lorentz formano un gruppo di dimensione sei: le (2.2) sono un
sistema di 10 equazioni per 16 variabili.
• det Λ = ±1 per ogni Λ ∈ L
• gli elementi con determinante uguale a uno formano il sottogruppo proprio, indicato
con L+ . Le inversioni, (x0 , x) → (x0 , −x), e (x0 , x) → (−x0 , x), non sono dunque
in L+ , ma l’inversione completa (x0 , x) → (−x0 , −x) si.
• la componente 00 della (2.2) implica |Λ00 | ≥ 1; le matrici con Λ00 ≥ 1 e det Λ = 1
formano il sottogruppo proprio ortocrono, indicato con L↑+ . Le trasformazioni con
Λ00 ≤ −1 invertono l’ordinamento temporale degli eventi, le trasformazioni proprie
ortocrone invece lo preservano1 . Quindi l’affermazione che un evento p è nel futuro
di un altro evento q è invariante per trasformazioni di Lorentz proprie ortocrone.
È questo un fatto molto importante, perché senza di esso non si potrebbe dare un
significato invariante alla causalità.
• (Λ−1 )ca ηbc = ηac Λcb , che è ovvia.
3.3
Tensori e campi di tensori
Dal punto di vista matematico, la metrica è un esempio di tensore covariante simmetrico
di rango due (per dire ha due indici posti in basso, o pedici), mentre le coordinate di un
evento sono un esempio di tensore controvariante di rango uno (un solo indice posto in
alto, o apice), detto più semplicemente quadrivettore.
3.3.1
tensori algebrici
Più in generale, dato un sistema di coordinate inerziali (F , xa ), possiamo definire un
tensore controvariante di rango n assegnando l’insieme delle sue 4n componenti K a1 ...an ,
ai ∈ {0, 1, 2, 3}, insieme con una “legge di trasformazione” che permetta di calcolare le
nuove componenti se si passa a nuove coordinate con una trasformazione di Lorentz. La
definizione è la seguente:
′
se x a = Λab xb
1
′
allora K a1 ...an = Λab11 · · · Λabnn K b1 ...bn
L’inversione dell’ordine temporale di eventi causalmente disgiunti è invece possibile.
48
(3.1)
′
Il significato fisico della trasformazione di K in K è evidente: la formula (3.1) permette di
′
calcolare le componenti del tensore nel sistema di riferimento inerziale F con le coordinate
′
x a = Λab xb se sono date le componenti dello stesso tensore in F . Nel contesto della
relatività ristretta tali oggetti si chiamano anche tensori di universo. Si vede che i tensori
si trasformano come il prodotto delle componenti di n vettori controvarianti. Per esempio,
dati due vettori x e y, l’oggetto K = x ⊗ y, definito dalle componenti K ab = xa y b + xb y a ,
è un tensore di rango due con la proprietà aggiuntiva di essere simmetrico: K ab = K ba .
In modo analogo si definiscono i tensori covarianti Ka1 ...am , caratterizzati dalle regole di
trasformazione
′
Ka1 ...am = (Λ−1 )ba11 · · · (Λ−1 )bamm Kb1 ...bm
(3.2)
e i tensori misti di tipo [n, m], aventi n indici posizionati in alto e m posizionati in basso.
Alcuni esempi sono: il tensore unità, con componenti δba uguali a uno se a = b e zero
altrimenti, il tensore η ab definito dalla relazione (ricordarsi che è sottintesa la sommatoria
sui valori dell’indice ripetuto b)
η ab ηbc = δca
e che si potrebbe chiamare la metrica inversa. Questi tensori hanno la proprietà speciale di
′
′
essere invarianti sotto l’azione del gruppo di Lorentz, cioè δba = δba e η ab = η ab . Un altro
tensore speciale è il tensore completamente antisimmetrico eabcd , uguale a +1 se {a, b, c, d}
è un permutazione pari di {1, 2, 3, 0}, e a −1 se è una permutazione dispari. Infatti
Λaα Λbβ Λcγ Λdδ eabcd = det Λ eαβγδ
mostra che eabcd è un tensore invariante rispetto alle trasformazioni di Lorentz proprie
(det Λ = 1).
Da un punto di vista matematico moderno, uno spazio di tensori è uno spazio vettoriale
che trasporta una rappresentazione lineare del gruppo di Lorentz.
La metrica inversa stabilisce un isomorfismo tra i tensori covarianti e controvarianti, mediante l’operazione di “innalzamento e abbassamento degli indici”; ad esempio, per un
quadrivettore si ha
v a = η ab vb
va = ηab v b
La (2.2) e l’invarianza di ηab implicano subito la consistenza di queste formule con la
definizione dei tensori covarianti e controvarianti. In particolare, è facile verificare che
η ab = η ac η bd ηcd
L’insieme dei tensori di un dato tipo (covariante, controvariante o misto) forma in modo
naturale uno spazio vettoriale. Esistono però altre due operazioni importanti che si possono fare con i tensori: la contrazione su due indici mappa un tensore di rango [n, m] in
uno di rango [n − 1, m − 1] mediante la formula
...ak ...an
...a...an
Kba11...b
→ Kba11...a...b
m
j ...bm
(3.3)
49
Per un tensore di rango due, la contrazione si chiama traccia
Kba → Kaa = η ab Kab = ηab K ab
e il risultato è un’invariante di Lorentz. L’altra operazione binaria è il prodotto tensoriale,
che converte due tensori di rango [k, l] e [n, m] nel tensore di rango [k + n, l + m] dato
dalla formula naturale
...ak c1 ...cn
...ak c1 ...cn
(K · T )ab11...b
= Kba11...b
Td1 ...dm
l d1 ...dm
l
(3.4)
Si noti che il prodotto è associativo ma non commutativo. È anche utile osservare che i
sottospazi dei tensori simmetrici con traccia zero, e dei tensori completamente antisimmetrici, sono invarianti per trasformazioni di Lorentz. Per i quadrivettori abbiamo anche
il prodotto scalare
(u, v) = ηab ua v b = ua v a = ua va
(3.5)
e il quadrato della norma u2 = ηab ua ub . Due quadrivettori u e v di diranno ortogonali se
(u, v) = 0; si deve però notare che questo non significa affatto che formino un angolo di
π/2, perché la metrica non è definita positiva.
3.3.2
campi tensoriali
Dato che le equazioni importanti della fisica sono equazioni differenziali, la trattazione
algebrica dei tensori offre solo limitate possibilità. Le funzioni differenziabili a valori
tensoriali
...an
xa → Kba11...b
(x)
m
si chiamano genericamente campi di tensori, o campi tensoriali. La formula di trasformazione deve ora tenere conto che si trasformano anche gli argomenti dei campi
′
′
ab...
nm...
Kcd...
(x ) = Λan Λbm · · · (Λ−1 )uc (Λ−1 )vd · · · Kuv...
(x),
′
x =Λ·x
(3.6)
′
Se x a = Λab xb si ha
( −1 )b ∂
∂
′a = Λ
a ∂xb
∂x
Questo mostra che le derivate parziali si trasformano come se fossero quadrivettori covarianti: perciò poniamo ∂/∂xa = ∂a . È dunque chiaro che differenziando k volte un campo
tensoriale di rango [n, m] si ottiene un campo tensoriale di rango [n, m + k]. Ad esempio,
se ϕ(x) è un campo scalare, cioè se
′
′
′
ϕ (x ) = ϕ(x) ←→ ϕ (x) = ϕ(Λ−1 x)
allora ϕa (x) = ∂a ϕ(x) è un campo vettoriale covariante.
50
3.4
Equazioni invarianti
La regola per formare equazioni invarianti di Lorentz è assai semplice: è sufficiente equagliare a zero qualunque espressione formata con campi tensoriali e con le loro derivate
parziali, che sia essa stessa un campo tensoriale per il gruppo di Lorentz. Naturalmente si deve avere l’accortezza di rispettare le regole per la moltiplicazione, la somma, la
contrazione e la differenziazione dei tensori che vi compaiono. Il fondamento di questa
prescrizione è il fatto ovvio che le espressioni tensoriali si trasformano linearmente. Il
tensore nullo in un sistema di coordinate è allora automaticamente nullo in tutti gli altri.
3.4.1
Equazione di Klein-gordon
Un famoso esempio di equazione invariante di Lorentz è l’equazione di Klein-Gordon per
un campo scalare (o l’equazione delle onde se m = 0)
η ab ∂a ∂b ϕ − m2 ϕ = 0
(4.1)
Si noti il fatto interessante: il parametro m è chiaramente l’inverso di una lunghezza, ma
se insistiamo che m rappresenti una massa allora il termine m2 ϕ andrebbe scritto nella
forma (m2 c2 /ℏ2 )ϕ, per ragioni dimensionali. Le più semplici soluzioni sono le onde piane
ϕk = a exp(ika xa ),
k 2 + m2 = 0
√
e allora la frequenza k 0 = ± k2 + m2 : si riconosce la somiglianza, non casuale, con
la relazione momento-energia di una particella relativistica. Un’applicazione di queste
soluzioni si ha nella riflessione da uno specchio mobile. Supponiamo che lo specchio sia
ortogonale all’asse x, lungo il quale si muove verso destra con velocità v. L’onda piana
incida sullo specchio nel piano [x, y] con angolo di incidenza α e ampiezza a = 1, e sia
m = 0: allora l’onda incidente è
ϕin (t, x, y) = e−iωt+iω(x cos α+y sin α)
e l’onda riflessa
′
′
′
′
ϕout (t, x, y) = Re−iω t−iω (x cos α −y sin α )
Si noti che, a priori, sia l’ampiezza che la frequenza che l’angolo di riflessione sono diversi
′
′
dai corrispondenti parametri dell’onda incidente. Se v = 0 allora α = α e ω = ω .
L’azione dello specchio è descritta dalla condizione al contorno di Dirichlet
ϕin (t, vt, y) + ϕout (t, vt, y) = 0
il cui significato è che il campo totale a sinistra dello specchio deve annullarsi sulla sua
superficie, il piano di equazione x = vt. Si trovano allora le condizioni necessarie
′
ω sin α = ω sin α
′
51
′
′
ω(1 − v cos α) = ω (1 + v cos α )
e R = −1.
′
′
E18: Si risolvano le equazioni precedenti per α e ω . Si dovrebbe trovare (ricordarsi che
c = 1)
′
cos α =
(1 + v 2 ) cos α − 2v
1 − 2v cos α + v 2
′
ω
1 − 2v cos α + v 2
=
ω
1 − v2
che è la formula di Einstein per l’effetto Doppler da uno specchio mobile.
E19: Si ripristini la velocità della luce nelle formule precedenti.
E20: Si provi a ricavare la formula di Einstein dello specchio mobile applicando direttamente le trasformazioni di Lorentz, tenendo presente che nel sistema di quiete dello
′
′
specchio α = α e ω = ω .
3.4.2
Equazione di Proca
Sia ϕa un campo vettoriale: il tensore ϕab = ∂a ϕb − ∂b ϕa è antisimmetrico. Il sistema di
equazioni
∂a ϕab + m2 ϕa = 0
è manifestamente covariante di Lorentz. Dalla definizione di ϕab seguono direttamente le
equazioni
eabcd ∂a ϕbc = 0
o anche
∂a ϕbc + ∂c ϕab + ∂b ϕca = 0
E21: Quante sono le equazioni scritte sopra? È il sistema determinato?
Le equazioni scritte sopra per un tensore antisimmetrico ϕab sono le più semplici equazioni
invarianti non banali2 . Come vedremo, con opportune identificazioni, e se m = 0, queste
sono identiche alle equazioni di Maxwell per il campo elettromagnetico nel vuoto, con ϕa
nel ruolo dei potenziali elettromagnetici. Si noti la conseguenza interessante
∂a ϕ a = 0
valida se m ̸= 0 (questione: perché?).
2
∂a ϕbc = 0 è per noi un esempio di equazione invariante banale.
52
3.5
Il tempo proprio
L’intervallo di tempo proprio fra due eventi con coordinate (x0 , xk ) e (x0 + dx0 , xk + dxk )
è definito dalla formula
dτ 2 = −ηab dxa dxb = (dx0 )2 − dx · dx
Se un orologio si muove lungo una curva x(x0 ), l’intervallo di tempo proprio (si assume
che l’orologio abbia una risoluzione elevata affiché dτ e dx0 possano essere infinitesimi) è
dτ = dx0 (1 − v2 /c2 )1/2
Dalla formula per la dilatazione del tempo si vede allora che dτ è il tempo indicato
dall’orologio in movimento. Si deve però assumere quanto segue: il tempo indicato da
un orologio in movimento non dipende dalla sua accelerazione, cosicché l’aumento di
tempo proprio dell’orologio in ogni istante è lo stesso che si avrebbe nel sistema di quiete
dell’orologio nel dato istante. Si noti che lungo una curva di tipo luce |v| = 1 e dτ = 0.
3.6
Il cono luce e le relazioni causali
La metrica divide i quadrivettori in tre classi distinte:
• se ηab V a V b < 0 si dice che V a è di tipo tempo, o time-like
• se ηab V a V b > 0 allora V a è di tipo spazio, o space-like
• se ηab V a V b = 0, V a è di tipo luce, o nullo, o causale, o light-like.
L’insieme dei vettori nulli determina un cono con vertice nell’origine O3 , detto il cono
luce e indicato con C. La falda superiore C+ , dove x0 > 0, è il cono luce degli eventi nel
futuro di O, quella inferiore C− (x0 < 0) è il cono luce degli eventi nel passato di O. Ogni
evento in C+ è caratterizzato da un vettore di tipo tempo con x0 > 0, ed è perciò nel
futuro causale dell’origine.
Se V a = xa − y a , essendo xa ed y a le coordinate di due eventi p e q, la classe di V a
determina le possibili relazioni causali tra p e q.
Se V 2 < 0 e V 0 > 0, si dirà che p è nel futuro cronologico di q, oppure che q è nel passato
cronologico di p. Queste definizioni sono invarianti di Lorentz.
Se V 2 > 0,si dirà che gli eventi p e q sono spazialmente separati. In questo caso non ci
può essere una relazione causale tra p e q perché nessun segnale ha il tempo necessario
per arrivare dall’uno all’altro, cioè “p accade” prima che il segnale da q lo raggiunga, o
viceversa. Inoltre, la successione temporale di p e q può essere invertita con una opportuna
trasformazione di Lorentz. Per finire, se V 2 = 0, un raggio di luce può connettere p e q,
che appartengono dunque allo stesso cono luce.
3
L’evento con coordinate xa = 0.
53
E22: Sia p = (x0 , x, 0, 0), con x > x0 > 0, un evento nel futuro dell’origine (l’evento
(0, 0, 0, 0)). Si trovi un’osservatore per il quale l’origine è nel futuro di p. Quanti ce ne
sono? Si determini la velocità di un osservatore per il quale i due eventi sono simultanei.
E23: Mostrare che la somma di due vettori timelike diretti nel futuro è un vettore timelike
diretto nel fututo.
Le relazioni causali si possono estendere ai sottoinsiemi dello spazio di Minkowski. Non
è detto che il futuro causale di una regione spaziale, anche infinita, comprenda tutto lo
spazio-tempo.
3.7
Curve
Data una curva differenziabile parametrizzata xa (λ), λ ∈ R1 , sia ua = ẋa (λ) il quadrivettore tangente alla curva: se u è di tipo tempo e u0 > 0 diremo che la curva è del tipo
temporale e diretta nel futuro. Una tale curva è sempre all’interno del cono luce futuro
uscente da un qualunque evento sulla curva, e per la velocità, v = dx/dx0 , si ha |v| < 1:
la curva è dunque la possibile linea di universo di una particella in moto, e si può scegliere
per λ il tempo proprio τ .
Se invece u è di tipo spazio diremo che la curva è di tipo spaziale. Nessuna particella
può percorrere una tale curva, perché in tal caso dovrebbe muoversi più velocemente della
luce.4 Infine può darsi che u2 = ηab ua ub = 0, nel qual caso la curva è detta di tipo luce, o
curva nulla. Vedremo che le curve nulle rappresentano le linee di universo delle particelle
con massa zero. Si noti che non possono essere parametrizzate con il tempo proprio, dato
che dτ = 0 per eventi con separazione nulla.
Usando il tempo proprio, le componenti della quadrivelocità sono
1
u0 = γ = √
,
1 − v2
uk = γv k ,
vk =
dxk
dt
(7.1)
Ricordiamo che abbiamo posto c = 1, e quindi x0 = t. Segue la formula
u2 ≡ ηab ua ub = ua ua = −1
Si definisce quadriaccelerazione il quadrivettore wa = u˙a . Le sue componenti sono
w0 = γ
dγ
= γ 4v · a
dt
(7.2)
w = γa + w0 v
(7.3)
dove a = dv/dt = v̇ è l’accelerazione ordinaria. Vediamo che
4
L’impossibilità di questo fatto è indicata dalle trasformazioni di Lorentz, che diventano complesse se
v > 1.
54
′
′
• wa = (0, a ) nel sistema F istantaneamente in quiete con la particella; da questo
segue che w è un quadrivettore di tipo spaziale, w2 > 0.
• derivando rispetto a τ la formula ηab ua ub = −1 si ottiene la condizione ηab ua wb = 0;
si esprime questo dicendo che u e w sono quadrivettori ortogonali. Questo segue
anche dal punto precedente, perché nel sistema di quiete si ha u = (1, 0) e w = (0, a).
′
• w2 ≡ ηab wa wb = |a |2
Possiamo adesso scrivere la condizione di simultaneità (2.25) in forma invariante
ua ∆xa = 0
(7.4)
Cioè un osservatore caratterizzato dalla velocità ua , giudica simultanei gli eventi che
appartengono all’iperpiano ortogonale a ua .
E24: Si consideri la famiglia di curve parametrizzate
x0 = a sinh(bλ),
x1 = cosh(bλ),
x2 = x3 = 0
Qual’è l’espressione del tempo proprio lungo la curva? si calcoli la quadri-velocità in
funzione del tempo. Stesso problema per la quadri-accelerazione. Sono le curve di tipo
tempo, spazio o luce?
55
Capitolo 4
Meccanica relativistica
[Ref.] L. D. Landau e E. M. Lifchitz, Teoria dei campi, Editori Riuniti (1976).
′
La meccanica relativistica parte con l’assunzione che in un sistema di coordinate F in
cui una particella è momentaneamente in quiete, valgono le equazioni del moto della
meccanica non relativistica
′
d2 r
′
m ′2 = f
dt
(0.1)
Il principio di relatività permette allora di dedurre senza ambiguità le equazioni del moto
in ogni altro sistema F , se solo si assoggetta la (0.1) a una trasformazione di Lorentz.
Con ciò non si ha però una definizione della forza in F .
4.1
quantità di moto, energia e forza
Sia m la massa propria della particella, la massa misurata nel sistema a riposo; definiamo
l’impulso relativistico pa = mua , e la forza relativistica
fa =
dpa
dua
=m
= mwa
dτ
dτ
(1.1)
Si hanno le relazioni importanti
p 2 + m2 = 0
e inoltre
p0 =
√
m
p 2 + m2 = √
,
1 − v2
(1.2)
mv
p = mγv = √
1 − v2
(1.3)
Dalla (1.1) segue fa ua = 0, da cui f 0 = f · v. L’Eq. (1.2)
√definisce un iperboloide con
0
due componenti connesse, corrispondenti ai valori p = ± p2 + m2 . Il foglio fisico è la
componente con p0 > 0.
56
Poiché
1
d
d
d
=√
=γ
2
dτ
dt
1 − v dt
si può scrivere la (1.1) nella forma
dp
= γ −1 f ,
dt
dp0
= γ −1 f · v
dt
(1.4)
Nel sistema di riferimento dove la particella è istantaneamente in quiete, f coincide con la
forza Newtoniana, che indichiamo con fN . Perciò identifichiamo p = γmv con la quantità
di moto e p0 = γm con l’energia della particella; le formule esplicite, reintroducendo c,
sono
mv
p= √
= mv + · · ·
1 − v 2 /c2
E = cp0 = √
mc2
1
= mc2 + mv 2 + · · ·
2
1 − v 2 /c2
Si ha anche
√
E = m2 c4 + c2 p2
una forma che si può applicare anche a particelle di massa zero, nel qual caso E = c|p|. Il
quadrimpulso di una tale particella è un vettore nullo, p2 = 0. Vediamo che l’impulso si
riduce all’espressione Newtoniana a meno di termini di ordine v 2 /c2 , mentre nell’energia è
presente la costante mc2 , detto energia propria, o di quiete, della particella. Il significato
di questo fatto sarà discusso fra poco.
4.2
formule di trasformazione
Dal carattere vettoriale delle grandezze meccaniche introdotte si ricavano subito le regole
di trasformazione della forza
′
f ·v
′
f = f + (γ − 1) 2 v + γf 0 v/c,
v
′
′
′
f 0 = γ(f 0 + f · v/c)
(2.1)
e del momento
′
p ·v
′
p = p + (γ − 1) 2 v + γp 0 v/c
v
′
′
(2.2)
′
p0 = c−1 E = γ(p 0 + v · p /c)
(2.3)
Come al solito, γ = (1 − v 2 /c2 )−1/2 .
57
4.3
sistemi di particelle
Per un sistema di particelle il quadrimpulso è additivo
∑
Pa =
pan ,
p2n = −Mn2
n
dove la somma è definita sopra un piano di simultaneità dell’osservatore, cioè gli impulsi
vanno sommati a un tempo dato del sistema inerziale rispetto al quale i momenti stessi
sono riferiti. Tuttavia in assenza di collisioni ogni singolo pa è conservato e ha dunque lo
stesso valore su ogni altro piano di simultaneità. Se un sottoinsieme di particelle collide,
conservata sarà la somma dei quadri-momenti del sottoinsieme, che avrà dunque lo stesso
valore su ogni altro piano di simultaneità. In entrambi i casi è indifferente su quale piano
di simultaneità si calcola la somma, che risulterà cosı̀ composta dallo stesso numero di
termini per tutti gli osservatori. È allora evidente che P a è un quadri-vettore.
La massa invariante, definita dalla P 2 = −M 2 , è maggiore della somma dei quadrati delle
masse
∑
∑
∑
M2 =
Mn2 − 2
(pn , pm ) >
Mn2
n
n>m
n
perché i prodotti scalari (pn , pm ) di vettori di tipo tempo aventi p0n > 0 è sempre definito negativo. Ma si può dire di più: dato che −(pn , pm ) > Mn Mm si ha di fatto la
diseguaglianza più forte
∑
M>
Mn
Questo mostra che l’energia interna (cinetica, ad esempio) del sistema contribuisce alla massa invariante, un aspetto della famosa equivalenza massa-energia. Le formule di
′
trasformazione (2.2), (2.3) mostrano che il sistema di riferimento nel quale P = 0 è
fisicamente realizzabile se P 2 < 0. Infatti, dalle formule scritte si ricava (ripristinando c)
V=
cP
E
e dunque |V| < c se E > c|P|. Tale riferimento si chiama il sistema del centro di massa, e
lo indichiamo con F0 . Dalle formule di trasformazione si ricava allora la quantità di moto
totale nel laboratorio F
E0 /c2 V
P= √
1 − V 2 /c2
(3.1)
dove E0 è l’energia totale in F0 . Da qui si vede che la massa invariante del sistema è
uguale a E0 /c2 .
In ogni riferimento F si può definire un punto detto centroide
∑
n En Xn
XC = ∑
n En
58
che è la generalizzazione relativistica del centro di massa. Si trova facilmente
c2 P
dXC
=
dt
E
Questo mostra che tutti i punti XC sono in quiete in F0 , ma non coincidono in generale
con XC0 . Infatti il centro di massa definito sopra dipende da F .
4.4
Equazioni del moto
Abbiamo notato sopra che la forza relativistica si riduce alla forza Newtonian a nel sistema
di quiete istantaneo della particella. Per trovare la forza nel sistema del laboratorio F ,
usiamo il fatto che f a è un quadrivettore; allora
f = fN + (γ − 1)
fN · v
v,
v2
f 0 = γfN · v
(4.1)
Essendo f a ua = 0, si ha anche f 0 = f · v. Vediamo che la definizione (1.1) fornisce un
sistema di quattro equazioni differenziali che possono essere usate per determinare il moto
della particella (se la forza Newtoniana fN è nota)
dp
= γ −1 f ≡ F,
dt
m
dγ
=F·v
dt
(4.2)
f si chiama la forza di Minkowski, mentre F è semplicemente la forza. Infatti, solo con
questa definizione la forza è la derivata di una quantità di moto, che si conserva per sistemi
chiusi. Dalla (4.2) si deduce facilmente (ripristinando c)
mγ
dv
F·v
=F− 2 v
dt
c
(4.3)
Si vede da qui che l’accelerazione non è proporzionale alla forza, un fatto che complica la
descrizione delle traiettorie relativistiche. Se fN è dovuta alla presenza di un campo di
forza, cioè se fN è una funzione del punto, è evidente che la forza va calcolata nel punto
occupato dalla particella; la formula di trasformazione dei tensori (vedi Eq. (3.6)) mostra
allora che gli argomenti di f e f 0 sono le coordinate xa della particella in moto. Ad esempio,
′
′
′
per una carica in un campo elettromagnetico si ha fN = eE (t , x ), quest’ultimo essendo
′
il campo elettrico nel sistema di quiete della particella all’istante t , con la particella nel
′
punto x ; allora
′
′
′
E (t , x ) · v
dp
′
′
′
= eE (t , x ) + e(γ − 1)
v
γ
dt
v2
Come vedremo, dalla formula di trasformazione dei campi elettromagnetici (v. la (3.4))
si ha
′
′
′
(
)
E (t , x ) · v
v
′
′
′
E (t , x ) + (γ − 1)
v
=
γ
E(t,
x)
+
×
B(t,
x)
v2
c
59
′
′
dove (t, x) e (t , x ) sono connessi dalle formule di trasformazione (2.26) e (2.27). Si ha
quindi l’equazione del moto relativistica
(
)
mv
v
d
√
= eE(t, x) + e × B(t, x)
(4.4)
2
2
dt
c
1 − v /c
in cui la forza di Lorentz viene ricavata dalla forza puramente elettrica come conseguenza
necessaria della simmetria di Lorentz.
Per riassumere, l’equazione del moto di una particella relativistica è la (4.3), o la (4.2) o
anche la (1.1), dove il vettore f a si calcola in funzione della forza Newtoniana usando la
formula di trasformazione dei quadrivettori (4.1).
4.5
Moto uniformemente accelerato, o iperbolico
Supponiamo che la forza Newtoniana fN abbia sempre la direzione della velocità e sia
costante, fN = mg; ciò equivale a dire che in ogni sistema in cui la particella è istantaneamente in quiete, l’accelerazione è costante e diretta come la velocità. Orientando
quest’ultima lungo l’asse x, dalla (4.1) si ottiene la quadriforza per questo caso
f a = (mgγv, mgγ, 0, 0) = mg(u1 , u0 , 0, 0) = m(du0 /dτ, du1 /dτ, 0, 0)
(5.1)
Dall’eq. (4.2) si ottiene
dγv
=g
dt
o, ripristinando c e scegliendo il dato iniziale v(0) = 0,
v=√
gt
1 + g 2 t2 /c2
Si noti v → c per t → ∞; nemmeno una forza che agisce per un tempo infinito riesce a
spingere la particella oltre la velocità limite. Integrando si ottiene (scegliendo x(0) = 0)
(√
)
x(t) = c2 g −1
1 + g 2 t2 /c2 − 1
Osserviamo che
(x + c2 /g)2 − c2 t2 = c4 g −2
la quale mostra che la linea di universo della particella è un ramo di iperbole. Dalla Fig. [5]
si vede che la traiettoria è sempre esterna al cono luce passante per il punto (0, −c2 /g)
(scelto come origine nella figura)
Gli eventi al di là del piano x0 − c2 x/g = 0 non possono influenzare la particella, quelli al
di là del piano x0 + c2 x/g = 0 non possono esserne influenzati.
60
Figura 4.1: Moto iperbolico
t
x
Cerchiamo la curva parametrizzata dal tempo proprio; dalla (5.1) si ha
du0
= u1 ,
dτ
du1
= u0
dτ
e dunque, con i dati iniziali usati sopra, u0 = cosh gτ , u1 = sinh gτ ; da qui seguono le
formule (ripristinando c)
x0 = c2 g −1 sinh(gτ /c)
(5.2)
x1 = c2 g −1 (cosh(gτ /c) − 1)
(5.3)
La (5.2) mostra drammaticamente gli effetti relativistici sul tempo. Il tempo a bordo di
un veicolo spaziale uniformemente accelerato varia logaritmicamente con il tempo T⊕ di
un osservatore terrestre. Infatti, se gT⊕ /c ≫ 1, dalla (5.2) si ottiene1
τ ≃ cg −1 ln (2gT⊕ /c)
Ad esempio, un viaggio di 100 anni terrestri con g = 9, 81 m · sec−2 (l’accelerazione di
gravità terrestre, per rendere confortevole il viaggio) si compie in soli 5, 3 anni secondo
l’equipaggio della nave spaziale, e la distanza percorsa sarebbe di circa 96 anni luce.
4.6
Il razzo relativistico
Come semplice modello di un razzo relativistico prendiamo un punto materiale che accelera non perché soggetto all’azione di una forza, ma perché emette parte della sua
1
Si ricordi che sinh−1 (x) = ln(x +
√
x2 + 1).
61
massa propria, il propellente, in direzione opposta al moto, secondo il principio dei motori a reazione. Le equazioni del moto relativistiche si possono dedurre dal principio di
conservazione del quadri-impulso.
Il “rate of change” del quadri-impulso sia proporzionale al “rate of change” della massa propria e alla velocità di emissione del propellente, cioè (con un piccolo cavillo che
discuteremo fra un momento)
dP a
dm a
=f
U
dτ
dτ
(6.1)
dove U a è la quadri-velocità del propellente ed f la “costante” di proporzionalità da
determinare. Se V a indica la quadri-velocità del razzo si ha
Ṗ a = ṁV a + mV̇ a
(6.2)
e naturalmente Va V̇ a = 0; pertanto
Ṗ a Va = −ṁc2
(6.3)
e dalla consistenza di questa relazione con la (6.1) otteniamo
f = c2 (−U · V )−1
(6.4)
In definitiva, le equazioni del moto del razzo relativistico assumono la forma
Ua
Ṗ = −ṁc
U ·V
a
2
(6.5)
o anche
)
c2 ṁ ( a
mV̇ = −
δ b + c−2 V a Vb U b
U ·V
a
(6.6)
Interpretazione fisica – L’invariante U · V ha un semplice significato: detta urel la velocità
relativa del propellente al razzo, si ha
−c−2 U · V = √
1
dτ
=
dτp
1 − u2rel /c2
(6.7)
dove gli elementi di tempo proprio si riferiscono rispettivamente al razzo (dτ ) e al propellente (dτp ). D’altronde nello scrivere la (6.1) è sottinteso che U b sia la derivata rispetto
a τp mentre le altre sono derivate rispetto a τ (era questo il piccolo cavillo). Dunque
il fattore c2 /(−U · V ) tiene conto del fatto che il propellente, muovendosi relativamente
al razzo, ha un diverso tempo proprio. In altri termini, corregge l’equazione del moto
tenendo conto della dilatazione relativistica del tempo esistente fra il propellente e il razzo. Potremmo dunque togliere il fattore U · V dall’equazione a patto di considerare U b
come la derivata rispetto a τ anziché a τp , da calcolarsi comunque usando la (6.7). In
pratica si risolve l’equazione del moto assumendo che urel sia una costante caratteristica
del sistema.
62
Esempio: Supponiamo che il moto sia lineare e prendiamo la componente temporale
della (6.6); si trova facilmente (c = 1 per semplicità)
√
(
)
mγ˙v = ṁ 1 − u2rel γu − γv (1 − u2rel )−1/2
dove γv e γu sono i soliti fattori relativistici di razzo e propellente, rispettivamente, con
le velocità indicate per distinguerli, e il punto denota la derivata nel tempo proprio. Ma
dalla trasformazione di Lorentz al sistema di quiete si ha
′
′
γu = γv (γu + vUx ) = γv (1 − u2rel )−1/2 (1 − vurel )
perché ovviamente
1
′
,
γu = √
1 − u2rel
′
′
Ux = −γu urel
Sostituendo nella prima equazione si trova infine
mγ˙v = −ṁγv vurel
oppure, notando che γ˙v = γv3 v v̇,
v̇
ṁ
= − urel
2
1−v
m
Assumendo urel costante (fissata dal progettista del motore) l’integrazione è elementare e
porta al risultato
(
)c/2urel
m(τ )
c−v
=
m0
c+v
A questo semplice livello non è possibile dire molto di più: o si fissa una funzione m(τ ),
proprietà del sistema di propulsione, e si ricava v(τ ), oppure si richiede una traiettoria e
si progetta m(τ ). Per esempio, si potrebbe chiedere per quale m(τ ) si può ottenere un
moto uniformemente accelerato con accelerazione propria g, usando come propellente la
radiazione (urel = c). In tal caso
v(τ ) = c tanh(gτ /c)
e quindi
m(τ )
=
m0
√
1 − tanh(gτ /c)
1 + tanh(gτ /c)
Per raggiungere Vega (a 26 anni luce) con la g terrestre ci vogliono circa 6, 66 anni di
tempo proprio2 , per cui secondo la formula la massa iniziale dell’astronave (m0 ) dovrebbe
essere circa 782 volte la massa del veicolo all’arrivo (m(τ = 6, 66 anni)), ovvero contenere
una quantità di propellente di gran lunga superiore alla massa del veicolo (il che impone
la necessità di acquisire il propellente strada facendo, come per le automobili).
2
3, 33 anni di accelerazione più altrettanti di decelerazione.
63
E = mc2
4.7
Abbiamo già notato che la massa invariante di un sistema arbitrario è uguale a E0 /c2
(l’energia nel sistema di quiete F0 ), se valgono le trasformazioni di Lorentz. Ma possiamo
andare oltre. Consideriamo un sistema fisico arbitrario coinvolto in un processo di emissione di due particelle identiche in direzioni opposte. Non si pensi alle particelle come
a punti materiali, bensı́ come a sistemi composti, quali due particelle alfa, o due nuclei
più complessi oppure due impulsi di onde elettromagnetiche. Consideriamo il processo
nel riferimento del centro di massa F0 , dove P = 0. In tale riferimento il sistema rimane
fermo se vale la legge di conservazione del momento, mentre la conservazione dell’energia
richiede
′
′
E0 − E1 = 2ϵ
′
′
E0 ed E1 sono le energie prima e dopo il processo di emissione e 2ϵ è l’energia dei due
frammenti. In un laboratorio rispetto al quale il sistema si muove con velocità V lungo
l’asse x, l’energia dei frammenti è
ε1 = γ(ε − V p cos α)
ε1 = γ(ε + V p cos α)
e dalla conservazione dell’energia
2ε
E0 − E1 = ε1 + ε2 = √
1 − V 2 /c2
o anche
(
′
′
(E0 − E0 ) − (E1 − E1 ) = 2ε
√
)
1
1 − V 2 /c2
−1
(7.1)
Il primo termine è la differenza fra l’energia del sistema quando la sua velocità è V e
′
l’energia quando è in quiete, e dunque per basse velocità E0 − E0 = M0 V 2 /2, dove M0
′
è la massa iniziale. Analogamente, se M1 è la massa finale si ha E1 − E1 = M1 V 2 /2, e
quindi la (7.1) diventa, al primo ordine in V 2 /c2 ,
∆M = M0 − M1 =
2ε
c2
(7.2)
Si vede da qui l’equivalenza tra massa ed energia: in seguito all’emissione il sistema
perde massa (e dunque inerzia) nella quantità indicata. Si può anche osservare che nel
riferimento del laboratorio il sistema perde la quantità di moto
2ε/c2
V
∆P = √
1 − V 2 /c2
come si ricava dalle formule di trasformazione (2.2). Siccome la velocità del sistema
non cambia nel processo di emissione, questo è possibile solo se si ha una perdita di
64
massa inerziale pari a 2ε/c2 . Un caso ancora più generale è stato considerato da Lorentz
(1911). Scriviamo il quadrimpulso di un sistema chiuso arbitrario Σ1 (che può consistere
di particelle, molle in tensione, raggi di luce, etc...) nella forma
P= √
m0 u
1−
u2 /c2
= mu,
P0 = √
m0 c
1 − u2 /c2
= mc
dove u è la velocità del sistema di riferimento del centro di massa F0 ; considerando per
semplicità una trasformazione di Lorentz lungo l’asse x, si ha (β = v/c)
Px − mv
′
,
Px = √
1 − β2
′
Py = Py ,
′
Pz = P z
Ora il sistema interagisca con un altro sistema Σ2 . Le leggi di conservazione danno
∆P1 + ∆P2 = 0,
′
′
∆P1 + ∆P2 = 0,
∆E1 + ∆E2 = 0
Quindi (γ = (1 − β 2 )−1/2 )
′
′
∆P1x + ∆P2x = γ(∆P1x + ∆P2x − v∆m − v∆E2 /c2 ) = γv(∆E1 /c2 − ∆m) = 0
da cui ∆m = c−2 ∆E1 . In entrambi i casi possiamo concludere che se l’energia e la
quantità di moto sono le componenti di un quadri-vettore P a che si conserva per tutti i
processi fisici nei sistemi isolati, allora ad ogni trasferimento di energia ∆E, corrisponde
un trasferimento di massa ∆m = ∆E/c2 . In generale l’interazione cambia sia la massa
che la velocità del sistema,
√ per cui con ∆m si deve intendere la variazione della massa
relativistica: m = m0 / 1 − u2 /c2 . La relazione massa/energia è osservata soprattutto
nelle reazioni nucleari. Ad esempio nel processo
3
7 Li
+ H → 24 He +24 He
dalla conservazione dell’energia si ha
(MLi + MH − 2MHe )c2 = 2KHe − KH
Il difetto di massa nel primo membro è misurato e vale circa 17, 31 Mev, mentre le misure
della variazione di energia cinetica nel secondo membro danno 17, 28 Mev. La notazione
KX denota l’energia cinetica della specie X
KX = √
M X c2
1−
v 2 /c2
− M X c2
La trasformazione di massa in energia nelle reazioni nucleari è la principale fonte di energia
nelle stelle.
Nota: dal punto di vista di un fisico moderno non è forse molto sorprendente questa
equivalenza di massa ed energia, almeno se si parla di energia elettromagnetica. La
radiazione è infatti composta da uno streaming continuo di fotoni, particelle elementari
65
del tutto simili a molte altre particelle note, ma con l’eccezione di avere massa propria
pari a zero, m = 0 (anche la carica elettrica è zero, ma questa è un’altra storia). Per il
resto collidono, si propagano, possiedono momento (nel senso relativistico del termine)
che può essere trasferito, possono essere emessi e assorbiti, e cosı̀ via. Dunque non sono
considerati fondamentalmente diversi da altre particelle subatomiche. Altre forme di
energia, come il calore, sono anch’esse associate al moto disordinato di grandi numeri di
particelle microscopiche, che possono collidere e trasferire momento ed energia. Ma nel
1905, ai temi di Einstein, energia e materia erano veramente considerate “sostanze” diverse
del mondo. La scoperta che l’energia trasferisce inerzia è dunque da considerarsi come un
risultato profondo e fondamentale della teoria di Einstein, senza il quale nemmeno la sua
teoria relativistica della gravitazione sarebbe stata possibile.
4.8
Collisioni
La legge di conservazione del momento relativistico ha importanti applicazioni alla teoria
delle collisioni di particelle altamente energetiche. Il soggetto diventa rapidamente complicato all’aumentare del numero di particelle coinvolte, ma per collisioni di due particelle o
per il decadimento di una singola particella la trattazione matematica è fondamentalmente
semplice e tuttavia molto significativa.
4.8.1
L’effetto Compton
Figura 4.2: Effetto Compton
χ’
χ
θ
Questo riguarda la collisione di un fotone, particella di massa propria uguale a zero, con
un elettrone o un positrone. Il fotone (linea tratteggiata) e l’elettrone convergono verso il
centro di collisione ad angolo χ e sono diffusi in altre direzioni. Sono riportati gli angoli
′
di diffusione del fotone (θ e χ ) rispettivamente rispetto al fotone o all’elettrone incidenti.
66
Indichiamo con P µ e k µ i momenti relativistici della carica e del fotone, rispettivamente.
Alla collisione elastica e± + γ → e± + γ corrisponde la legge di conservazione
P µ + kµ = P
′µ
′
+kµ
(8.1)
Se l’elettrone finale non si osserva, conviene scrivere
′
P µ + kµ − k µ = P
′µ
e prendere la norma di entrambi i membri, ricordando che P 2 = P
allora
′
′2
′
= −m2 e k 2 = k 2 = 0;
′
−m2 + 2P · (k − k ) − 2k · k = −m2
Si ha però
′
′
k · k = −h2 νν (1 − cos θ),
−P · k = hν(E − P cos χ),
′
′
′
−P · k = hν (E − P cos χ )
′
dove θ, χ, χ sono rispettivamente l’angolo di diffusione del fotone rispetto al fotone
incidente, l’angolo di incidenza tra il fotone e l’elettrone iniziali e l’angolo di diffusione
del fotone rispetto all’elettrone diffuso (vedi figura), E l’energia dell’elettrone e P la sua
quantità di moto. Si trova in definitiva
′
′
′
′
Eh(ν − ν) = P (ν cos χ − ν cos χ) − 2h2 ν ν sin2 θ/2
′
Distinguiamo i due casi (A): χ = 0, nel qual caso χ = θ, e (B): χ = π (collisione frontale)
nel qual caso χ = π − θ. Nel caso (A), introducendo la lunghezza d’onda λ = c/ν e
′
∆λ = λ − λ (si noti che abbiamo reintrodotto c), con un semplice conto si trova la
formula
∆λ = 2λ
(k + P )c
sin2 θ/2
E − Pc
(8.2)
dove k = h/λ è il momento del fotone. Nel caso (B) (detto anche della “diffusione
Compton inversa”)
∆λ = 2λ
(k − P )c
sin2 θ/2
E + Pc
(8.3)
Per P → 0 entrambe le formule si riducono alla classica formula di Compton
∆λ =
h
(1 − cos θ)
mc
(8.4)
Se si ignora il momento del fotone (nel limite classico h → 0) si ha, per esempio
∆λ = 2λ
Pc
sin2 θ/2
E − Pc
(8.5)
che coincide con la formula classica per la diffusione elastica da una carica in moto. La
formula esprime semplicemente il fatto che nel sistema a riposo della carica la radiazione
67
è diffusa con la stessa frequenza della radiazione incidente, per cui lo spostamento ∆λ è
interamente dovuto all’effetto Doppler della carica in moto.
′
E: Mostrare che la frequenza ν della radiazione di una carica in moto è legata alla
frequenza ν della radiazione incidente dalla formula
)
(
)
(
V
V
′
′
ν 1 − cos χ = ν 1 − cos χ
c
c
dove V è la velocità della carica.
Usando ora V = P/E e λ = c/ν, si vede subito che questa formula diventa esattamente
la (8.5) per il caso χ = 0. Se χ = π si ottiene il limite classico del caso (B).C.V.D.
Le formule (8.2), (8.3) e (8.4) sono in ottimo accordo con i risultati sperimentali. Esse
confermano simultaneamente la relatività, la meccanica quantistica e la natura corpuscolare della radiazione elettromagnetica (si ricordi che l’ipotesi dei fotoni è dovuta ad
Einstein).
4.8.2
Energia di soglia
Certi tipi di collisioni possono avvenire solo se l’energia delle particelle incidenti supera
una certa soglia. Si tratta di processi con produzione di nuove particelle, per i quali è
dunque richiesta una soglia di energia minima. Un esempio è la produzione di mesoni
neutri per urto di protoni
p+p→p+p+π
Sia M ≃ 938 Gev la massa a riposo del protone e mπ ≃ 135 Mev quella del mesone. Si
assuma un protone inizialmente in quiete; si ha allora
P µ + M δ0µ = PTµ + pµπ
dove PT è il momento totale dei protoni nello stato finale. Da qui
2EM = −PT2 + m2π − 2PT · pπ − 2M 2
Per trovare il minimo di questa espressione (l’energia di soglia, appunto) calcoliamo i due
invarianti nel sistema del centro di massa dei protoni, dove PT = 0. Si ottiene subito
l’espressione
(Ecm + mπ )2 − 2M 2
2M
L’energia nel centro di massa non può essere inferiore a 2M , e questo minimo valore può
essere raggiunto se i protoni sono entrambi fermi nel sistema del centro di massa. Questo
significa che la configurazione finale che realizza l’energia minima si ha con i protoni che
si muovono insieme con la stessa velocità, uguale a quella del centro di massa. Allora la
soglia richiesta è
E=
Emin =
(2M + mπ )2 − 2M 2
2M
(8.6)
68
e corrisponde al fattore relativistico di rapidità
γmin = 1 +
2mπ
m2
+ π2
M
2M
Si noti che la conservazione dell’energia da sola non fornisce la soglia corretta. Infatti si
avrebbe
E = ET + Eπ − M > M + mπ
che suggerisce la soglia Emin = M + mπ ; ma questa è raggiunta solo se le velocità di tutte
le particelle partecipanti sono nulle, il che è impossibile in una collisione.
Si può misurare l’efficienza del processo di produzione chiedendosi quale frazione dell’energia cinetica del protone incidente contribuisce alla massa del mesone. L’energia cinetica
del protone è (γ − 1)M , per cui il rapporto
η=
mπ
M (γmin − 1)
=
1
2(1 + mπ /4M )
Con i valori citati delle masse l’efficienza è circa del 48%. Un altro esempio è la produzione
del mesone J/Ψ(3096)
e− + e+ → J/ψ → hadrons
che è rivelato come risonanza nel canale e+ + e− in adroni. Assumendo e+ in quiete (non
come nell’esperimento!) si ha
µ
pµ + mδ0µ = PJ/ψ
e da qui
Emin
M 2 − 2m2
=
2m
Con la massa della particella J/Ψ pari a 3096 Mev e m = 0, 5 Mev, l’efficienza è quasi
zero
η=
M
m(γmin − 1)
≃
2m
1
≃
M
3100
e l’energia cinetica richiesta avrebbe il valore (astronomico per i tempi della scoperta,
novembre 1976) di 9 × 103 Gev. Se invece i fasci di e± collidono frontalmente (come
nell’esperimento reale) si ha più semplicemente
2E = 2mγ = EJ/ψ ≥ M
per cui
1
Emin = M ∼ 1548 Mev
2
69
E: Mostrare che l’annichilazione di un fotone in una coppia elettrone positrone è impossibile. Si mostri che in presenza di un nucleone N la reazione
γ + N → N + e+ + e−
diventa possibile. Si mostri che l’energia di soglia del fotone è
(
m)
2
hν = 2mc 1 +
M
Con M = 938 Mev e m = 0, 5 Mev si verifichi che l’efficienza alla soglia è praticamente
del 100%.
4.8.3
Decadimento
Una classe importante di problemi riguarda la disintegrazione di una particella in due o
più frammenti. Nel caso di due frammenti il problema è interamente determinato. Sia la
particella instabile inizialmente in quiete. La conservazione dell’impulso relativistico dà
M = E1 + E2 ,
P1 + P2 = 0
Allora
(M − E1 )2 − |P2 |2 = m22
oppure
E1 =
M 2 − m22 + m21
2M
Analogamente
E2 =
M 2 − m21 + m22
2M
Il problema inverso è la fusione di due particelle in una di massa M . L’energia richiesta, nel
caso che una delle due sia inizialmente in quiete, si calcola dalla conservazione dell’impulso
nella forma
pµ1 + m2 δ0µ = P µ
eguagliando la norma dei due membri. Dunque
m21 + m22 + 2m2 E1 = M 2
da cui segue facilmente E1 . Nel caso del decadimento di una particella in volo si può
scrivere, per esempio,
pµ2 = P µ − pµ1
70
Da qui la relazione
m22
2
=M +
m21
√
− 2EE1 + 2P E12 − m21 cos θ
(8.7)
o anche
(2EE1 − 2M E01 )2 = 4P 2 cos2 θ(E12 − m21 )
e infine usando V = P/E
√
2
(1 − V 2 cos2 θ)E12 − 2E01 1 − V 2 E1 + E01
(1 − V 2 ) + m21 V 2 cos2 θ = 0
(8.8)
Le due radici per un valore dato di θ corrispondono al caso v0 < V , dove v0 è la velocità
della particella 1 nel sistema c.m. (centro di massa) e V quella della particella instabile.
Se invece v0 > V la radice è unica mentre nel caso degenere corrispondente a v0 = V si ha
una radice doppia. La spiegazione grafica dell’esistenza di due radici è la seguente. Dalle
formule di trasformazione si ha l’impulso della prima particella (per la seconda le formule
sono analoghe) in funzione delle grandezze riferite al sistema c.m.
px = γ(p0 cos α + V E0 ),
py = p0y = p0 sin α
da cui si ottiene l’equazione di un’ellisse
(px − γV E0 )2 p2y
+ 2 =1
γ 2 p20
p0
Se il semiasse maggiore, a = γp0 , è minore della distanza del centro dell’ellisse dall’origine,
distanza che è γV E0 , ossia se v0 < V , allora per un dato θ il vettore (px , py ) interseca
l’ellisse i due punti, che corrispondono appunto ai due valori possibili dell’energia. In
questo caso esiste anche un valore massimo per θ (quando il vettore (px , py ) è tangente
all’ellisse) che si trova facilmente annullando il discriminante dell’equazione (8.8)
√
p0 1 − V 2
sin θmax =
m1 V
4.9
Moto dello spin e precessione di Thomas
Consideriamo una particella dotata di momento angolare intrinseco, descritto nel sistema
di quiete (momentaneo) della particella dal vettore J0 ; si può pensare a J0 come al valore
medio dell’operatore del momento angolare nel sistema a riposo, oppure come al momento
angolare orbitale di una trottola nel limite in cui il suo momento di inerzia tende a zero
e la velocità angolare tende all’infinito, restando costante il loro prodotto. In entrambi i
casi, ci riferiremo al vettore J0 semplicemente come allo “spin” della particella. Si noti che
le conclusioni della relatività sul moto dello spin sono comunque indipendenti dal modello
preciso che governa i suoi “gradi di libertà interni”.
71
Se nel sistema di quiete F0 il momento torcente si annulla, il vettore J0 non precede
(rispetto a F0 )
dJ0
=0
dt′
(9.1)
La descrizione relativistica dello spin introduce il quadri-vettore J a che in F0 si riduce a
J0a = (0, J0 ); dunque si ha sempre J 2 > 0 e Ja ua = 0, dove ua = (γ, γv) è la quadri-velocità
della particella.
Qual’è ora l’equazione relativistica (cioè invariante di Lorentz) che descrive il moto dello
′
spin? Osservando che in F0 si ha dt = dτ , si potrebbe pensare che la corretta equazione
relativistica sia l’equazione invariante dJ a /dτ = 0. Tuttavia si vede facilmente che non
può essere cosı̀: la condizione di ortogonalità J a ua = 0 implicherebbe infatti la nuova
condizione u̇b J b = 0, u̇b = dub /dτ , che in generale non è vera. Scriviamo allora l’equazione
più generale che si riduce alla (9.1) nel sistema di quiete
dJ a
= ηua
dτ
(9.2)
Contraendo con ua e usando l’ortogonalità J a ua = 0 si trova
η = ab J b
(9.3)
Le formule (9.2) e (9.3) risolvono il problema posto. Si noti che si può anche scrivere la
(9.2) nella forma
dJ a
= Ωab J b ,
dτ
Ωab = ua u̇b − ub u̇a
(9.4)
La legge di trasporto di un vettore secondo questa equazione è detta trasporto di FermiWalker. Dalle trasformazioni di Lorentz si deducono le formule
J = J0 +
(γ − 1)
(J0 · v) v,
v2
J 0 = J · v = γ (J0 · v)
(9.5)
precessione dello spin
La (9.5) mostra che la parte spaziale di J a non rappresenta lo spin della particella “visto”
nel sistema del laboratorio, che è invece descritto dal vettore J0 . Dall’equazione del moto
si ha
)
(
dJ0
d (γ − 1)
(γ − 1)
dJ
=
+
(J0 · v) v +
(J0 · v)v̇ = ab J b v
2
dt
dt
dt
v
v2
Si vede facilmente che ab J b = −a0 J 0 + a · J = γ 2 v̇ · J, se si usano le formule esplicite per
la quadri-accelerazione
a=γ
dγv
= γ 4 (v · v̇)v + γ 2 v̇,
dt
a0 = γ 4 (v · v̇)
72
Inoltre J0 · v = γ −1 J · v = γ −1 J 0 e
dJ 0
= ab J b = γ 2 v̇ · J
dt
Possiamo quindi scrivere
(
(
))
dJ0
d (γ − 1) 0
(γ − 1)
2
= γ (v̇ · J) −
J
v−
(J0 · v)v̇
2
dt
dt
γv
v2
Un calcoletto un pò lungo ma elementare porta al risultato semplice
(
)
d (γ − 1) 0
γ−1
2
γ (v̇ · J) −
J
=
(J0 · v̇)
dt
γv2
v2
Questo si ottiene usando: (a) la formula di trasformazione di J per eliminare J in favore
di J0 , (b) l’equazione del moto per J 0 e (c) la relazione
dγ
= γ 3 v · v̇
dt
In definitiva si ottiene l’equazione per la precessione dello spin
dJ0
(γ − 1)
=
((J0 · v̇)v − (J0 · v)v̇) = Ω ∧ J0
dt
v2
dove la velocità angolare di precessione è
Ω=−
4.10
(γ − 1)
v ∧ v̇
v2
(9.6)
(9.7)
Principio variazionale
Il moto della particella libera può essere ricavato da un principio variazionale cha ha un
suo interesse particolare. Infatti l’azione di un sistema libero è il punto di partenza per
l’introduzione delle interazioni. Si consideri la seguente azione per una particella di massa
m
∫
∫ f√
I = −m
dτ = −m
−dxa dxa
(10.1)
γ(i,f )
i
dove γ(a, b) è una curva differenziabile timelike che unisce gli eventi i ed f . Si noti che
l’azione è invariante di Lorentz. Variando le coordinate degli eventi si ottiene, al primo
ordine in δxa , la formula
∫ f √
∫ f
∫ f
dxa
dpa a
a
a f
2
δI = −m
δ −dx = m
dδx = pa δx |i −
δx
(10.2)
dτ
dτ
i
i
i
dove pa = mua = mẋa è il quadri-impulso della particella. Se le variazioni sono nulle negli
estremi della curva, allora la condizione estremale δI = 0 equivale all’equazione del moto
73
ṗa = 0. Le soluzioni si chiamano curve estremali dell’azione.
Considerando l’azione sull’estremale come una funzione delle coordinate del punto terminale dell’estremale, dalla formula appena scritta si ottiene
P a = ∂a I
(10.3)
La “mass-shell condition”, p2 + m2 = 0, si traduce allora nella versione relativistica
dell’equazione di Hamilton-Jacobi
∂a I∂ a I + m2 = 0
(10.4)
Per un sistema di particelle libere scriveremo
∑
In
I=
n
Lagrangiana
Usando il tempo t di un sistema di riferimento inerziale l’azione può scriversi nella forma
∫ t2 √
I = −m
1 − v 2 dt
(10.5)
t1
Di qui leggiamo la lagrangiana
√
1
L = −m 1 − v 2 = −m + mv 2 + · · ·
2
(10.6)
Vediamo che per basse velocità dà la corretta lagrangiana non relativistica. L’esistenza
della lagrangiana permette di riconfermare le espressioni ottenute per il momento lineare
e l’energia. Infatti
p=
∂L
mv
=√
,
∂v
1 − v2
m
E =p·v−L= √
1 − v2
(10.7)
come volevasi dimostrare.
Simmetrie
L’equazione (10.2) si presta ad una importante applicazione. Consideriamo una o più
trasformazioni infinitesime delle variabili dinamiche
xa → x̄a = xa + δϵ xa
con la proprietà di non cambiare l’azione
I[x] = I[x̄] = I[x + δϵ x]
(10.8)
74
Se questo è il caso diremo che abbiamo a che fare con trasformazioni di simmetria. Allora
δϵ I = 0 anche indipendentemente dalla validità dalle equazioni del moto, e usando la
(10.2) si avrà l’identità
∫ f
dpa
a f
δϵ I = pa δϵ x |i −
δϵ xa = 0
(10.9)
dτ
i
L’azione possiede certamente le simmetrie di Lorentz e di traslazione spazio-temporale, ma
possiede anche simmetrie meno evidenti e più complicate, come ad esempio la simmetria
di invarianza per riparametrizzazione della traiettoria. Ora se le equazioni del moto sono
soddisfatte, la (10.9) si riduce alla
pa δϵ xa |i = pa δϵ xa |f
(10.10)
che è una legge di conservazione: l’equazione stipula che le grandezze pa δϵ xa sono le stesse
per ogni coppia di eventi sulla linea di universo della particella. Facciamo due esempi.
Se δϵ xa = ϵa allora si ha una simmetria di traslazione e la grandezza che si conserva è la
componente di pa lungo ϵb , cioè pa ϵa . Dato che ϵ è arbitrario ciò equivale a dire che si
conserva il quadri-impulso, come segue per altro direttamente dalle equazioni del moto.
Se invece
δϵ xa = ϵab xb ,
ϵab + ϵba = 0
E 25 Si dimostri che questa variazione rappresenta una trasformazione di Lorentz infinitesima. Si dimostri che I è invariante, cioè che vale la (10.8).
La legge di conservazione dice allora che si conservano le grandezze
Lab = xa pb − xb pa
4.11
(10.11)
Momento angolare
75
Capitolo 5
Elettrodinamica covariante
È ben noto che i campi elettromagnetici obbediscono alle equazioni di Maxwell. La prima
coppia di queste equazioni
rot E = −
1 ∂B
,
c ∂t
1a coppia
div B = 0
(0.1)
è equivalente al fatto che i campi derivano dai potenziali A e ϕ, secondo le formule
standard
E = −∇ϕ −
1 ∂A
,
c ∂t
B = rot A
(0.2)
La seconda coppia introduce l’interazione con le sorgenti dei campi, che sono le cariche
elettriche e le correnti,
rot B =
1 ∂E 4π
+
J,
c ∂t
c
div E = 4πρ
2a coppia
(0.3)
ρ è la densità di carica, J la densità di corrente, e sono entrambe vincolate dall’equazione
di continuità
∂ρ
+ div J = 0
∂t
5.1
(0.4)
Forma covariante delle equazioni
Per studiare la covarianza di queste equazioni rispetto al gruppo di Lorentz, introduciamo
il potenziale
Aa = (−ϕ, A),
Aa = (ϕ, A)
e il campo antisimmetrico
Fab = ∂a Ab − ∂b Aa
(1.1)
76
Allora il confronto con la (0.2) dà le componenti
Fj0 = Ej ,
Fij = eijk Bk
o in forma più esplicita
0 −Ex −Ey −Ez
Ex
0
Bz −By
Fab =
Ey −Bz
0
Bx
Ez By −Bx
0
(1.2)
Da questo si verifica direttamente che le quattro equazioni
∂a Fbc + ∂b Fca + ∂c Fab = 0
(1.3)
sono esattamente identiche alla 1a coppia delle equazioni di Maxwell, e dunque che la
covarianza di queste equazioni è equivalente al fatto che Fab sia un tensore di universo
covariante (cioè un tensore nello spazio di Minkowski).
Per riscrivere la seconda coppia introduciamo formalmente la corrente quadri-dimensionale
di componenti
J a = (cρ, J)
(1.4)
L’equazione di continuità (0.4) assume la forma covariante
∂a J a = 0
(1.5)
e tale veramente sarà se J a è un quadri-vettore. Come vedremo, questo segue dall’invarianza di Lorentz della carica elettrica. L’Eq. (0.4) prende il nome di condizione di
conservazione della corrente.
Si verifica direttamente dalla (1.2) che le quattro equazioni
4π b
J ,
F ab = η ac η bd Fcd
(1.6)
c
sono esattamente identiche alla 2a coppia delle equazioni di Maxwell. Ad esempio, se
b = 0 si ha ∂k F k0 = −4πρ, perché F 00 = 0 e J 0 = cρ. Ma F k0 = −Ek , da cui si ottiene
appunto l’equazione div E = 4πρ. Si noti che che la covarianza delle (1.6) richiede che J a
sia un quadri-vettore. Mostriamo che questo fatto segue dall’invarianza di Lorentz della
carica elettrica.
∂a F ab = −
5.2
Corrente elettrica
Consideriamo una carica puntiforme di valore e, e sia z a (p) la sua linea di universo parametrizzata da p. Se la carica è invariante per trasformazioni di Lorentz allora l’integrale
esteso alla linea di universo
∫
a
J (x) = e δ (4) (x − z(p))dz a
(2.1)
77
definisce un campo di quadri-vettori che chiameremo la quadri-corrente elettrica. Si noti
che l’integrale non dipende dalla scelta del parametro p. Possiamo allora scegliere p = z 0 ,
cosı̀ che z 0 (p) = z 0 e l’integrale diventa
J a (x0 , x) = e δ (3) (x − z(x0 )) v a ,
va =
dz a
dx0
(2.2)
La definizione di J a come corrente elettrica è giustificata dalle seguenti proprietà
• vale l’equazione di continuità
∂a J a = 0
(2.3)
• J 0 rappresenta la densità di carica elettrica. Infatti
∫
J 0 dx = e
(2.4)
come segue immediatamente dalla (2.2).
L’invarianza di Lorentz della carica è resa necessaria dal principio di relatività, perché
la carica elettrica è la sorgente dei campi elettromagnetici e, dunque, misure dei campi
potrebbero rivelare la velocità del sistema di riferimento. Più concretamente, una dipendenza della carica dell’elettrone dalla velocità è sicuramente inamissibile perché altrimenti
non sarebbe possibile avere atomi elettricamente neutri. Inoltre gli spettri atomici sono
indipendenti dalla velocità degli elettroni negli atomi e dipendono dalla velocità di questi
ultimi solo attraverso l’effetto Doppler.
Il carattere vettoriale della corrente implica subito il carattere tensoriale di F ab , e con
esso la covarianza delle equazioni di Maxwell (1.3) e (1.6). Dato che la carica è additiva,
la corrente di un sistema di particelle sarà
∑ ∫
a
J (x) =
en δ (4) (x − zn (p)) dzna
(2.5)
n
oppure
J a (x0 , x) =
∑
en δ (3) (x − zn (x0 )) vna
(2.6)
n
La conservazione della corrente espressa dall’equazione ∂a J a = 0 ha una conseguenza
molto importante che ritroveremo anche nel caso di correnti conservate più generali di
J a . Si consideri la regione di spazio-tempo Ω racchiusa tra i due iperpiani x0 = ct1 e
x0 = ct2 > ct1 . Allora
∫
∫
∫
∫
∫
a 4
0 3
0 3
0
0=
∂a J d x =
J d x−
d3 x div J
(2.7)
J d x + dx
Ω
x0 =ct2
x0 =ct1
78
Se J tende a zero all’infinito in maniera sufficientemente rapida l’ultimo integrale si annulla
e si ha la legge di conservazione della carica elettrica
∫
dQ
= 0,
Q=
J 0 (t, x)d3 x
dt
Σ
dove Σ è l’iperpiano x0 = cte. Più in generale,
∫
Q = − J a Na (t, x)dV
Σ
dove Σ è l’iperpiano Na xa = cte e dV l’elemento di volume proprio sull’iperpiano, cioè,
per chi conosce le forme differenziali, dV = N a eabcd dxb dxc dxd /6.
′
′
Q è invariante di Lorentz: infatti, scegliendo l’iperpiano Σ definito da x 0 = cte, per la
′
conservazione della corrente Q non cambia e dV = d3 x . Ma allora
∫
∫
∫
′a
′
′
′
′
′
′
a
Q=−
J Na (t, x)dV = −
J Na (t, x )dV =
J 0 (t, x )d3 x = Q
Σ′
Σ′
Σ′
′
′
perché la normale a Σ per l’osservatore in moto che usa le coordinate x a è precisamente
′
Na = (−1, 0, 0, 0).
teorema di Gauss
Possiamo scrivere la (2.7) nella forma di un teorema di Gauss in quattro dimensioni. A
tale scopo indichiamo con ∂Ω il bordo orientato della regione Ω. Assumeremo che ∂Ω sia
l’unione disgiunta di certe ipersuperfici, alcune delle quali sono spaziali (il vettore normale
è di tipo tempo), altre temporali (il vettore normale è di tipo spazio), ma nessuna è nulla
(il vettore normale è di tipo nullo). Sia na il vettore normale al bordo, orientato verso
l’esterno di Ω sui tratti di ∂Ω che sono di tipo tempo, e verso l’interno sui tratti spaziali.
Infine sia K Aa un tensore, dove A indica gli altri indici possibilmente presenti. Allora si
ha
∫
∫
Aa 4
∂a K d x =
K Aa na dV
(2.8)
Ω
∂Ω
dove dV è l’elemento di volume sul bordo. La ricetta per dV è la seguente: scelte tre
coordinate (y 1 , y 2 , y 3 ) sul bordo, la distanza che vi è indotta dalla metrica di Minkowski
sarà
ds2 = ηab dxa dxb =
3
∑
hij (y)dy i dy j ,
hij (y) = ηab
i,j=1
∂xa ∂xb
∂y i ∂y j
perché se xa (y j ) sono le coordinate inerziali di un punto sul bordo, si ha evidentemente
a
dx =
3
∑
∂xa
j=1
∂y j
dy j
79
Se h = det(hij ), la formula per la misura è
√
dV = h d3 y
Si noti che dV , oltre a essere invariante per trasformazioni di Lorentz, lo è anche per
′
cambiamenti arbitrari di coordinate sul bordo, y i → y i (y). Si può interpretare dV come
l’elemento di volume proprio, misurato in un sistema di coordinate ripetto al quale l’elemento è in quiete. La sua invarianza spiega l’invarianza di Lorentz della carica Q o, più
in generale, del secondo membro della (2.8).
invarianza di gauge
La prescrizione Fab = ∂a Ab − ∂b Aa non determina i potenziali, perché la cosiddetta
trasformazione di gauge
′
Aa (x) = Aa (x) + ∂a f (x)
(2.9)
lascia invariati i campi elettromagnetici, e dunque anche le equazioni di Maxwell. È questa
la ben nota invarianza di gauge dell’elettrodinamica, che rende i potenziali non misurabili.
Questa stessa simmetria impedisce anche che le equazioni per i potenziali non possano
essere risolte univocamente. Tuttavia la seconda coppia diventa, sostituendovi la (1.1),
2Aa − ∂a ∂ b Ab = −
4π
Ja
c
(2.10)
Questo suggerisce di sfruttare l’invarianza di gauge per imporre la condizione di Lorenz
(non Lorentz)
∂a A a = 0
(2.11)
che ha il merito di semplificare grandemente le equazioni di campo e di essere invariante
di Lorentz (non Lorenz). Si osservi che la trasformazione di gauge Aa → Aa + ∂a Ψ, dove
2Ψ = 0, preserva la condizione di Lorenz e la (2.10).
5.3
Trasformazione dei campi
Consideriamo per prima una trasformazione di Lorentz speciale lungo x, con velocità v,
e poniamo Λba = (Λ−1 )ab ; si ha
γ γv 0 0
γv γ 0 0
(3.1)
Λb a =
0 0 1 0
0 0 0 1
Dalla formula di trasformazione
′
′
Fab (x ) = Λac Λbd Fcd (x)
80
si ricavano le formule
′
Ex = Ex ,
v
′
Ey = γ(Ey − Bz ),
c
v
′
Ez = γ(Ez + By )
c
(3.2)
v
v
′
′
By = γ(By + Ez ), Bz = γ(Bz − Ey )
(3.3)
c
c
Si noti come il carattere elettrico o magnetico dei campi diventi un aspetto relativo. In
forma vettoriale
(
)
E·v
1
′
E = (1 − γ) 2 v + γ E + v ∧ B
(3.4)
v
c
′
Bx = Bx ,
(
)
B·v
1
B = (1 − γ) 2 v + γ B − v ∧ E
v
c
′
(3.5)
Interessanti sono anche le regole di trasformazione delle correnti
′
ρ = γ(ρ − vJx /c2 ),
′
Jx = γ(Jx − vρ),
′
Jy = Jy ,
′
Jz = Jz
(3.6)
Ad esempio, un filo percorso da corrente appare elettricamente carico a un osservatore
in moto rispetto al filo. Ciò si accorda con il fatto che un tale osservatore osservebbe,
secondo le (3.2), un campo elettrico direttamente proporzionale al campo magnetico del
filo. Le formule (3.6) mostrano anche che la distinzione fra correnti di convezione (J = ρv)
e correnti di conduzione dipende dal sistema di riferimento (ovvero è relativa). Per una
semplice spiegazione microscopica della misteriosa apparizione di cariche nei conduttori
in movimento si veda W. Pauli, Theory of Relativity, Dover Ed. (1958) oppure E. Purcell,
Elettricità e magnetismo, Collana “La Fisica di Berkeley“, Zanichelli 1973.
5.4
Elettrodinamica fenomenologica
Diamo qui un breve cenno alla formulazione relativistica delle più importanti equazioni
costitutive dell’elettrodinamica macroscopica. Per un dielettrico omogeneo e isotropo
queste sono
D = εE,
B = µH
(4.1)
mentre per i conduttori percorsi da corrente continua, o alternata con frequenza sufficientemente bassa1 , si ha la legge di Ohm per la corrente di conduzione
Jc = σE
(4.2)
I campi macroscopici in queste equazioni sono campi medi all’interno dei materiali, ε è la
costante dielettrica, µ la permeabilità magnetica2 e σ la conducibilità. Tutte le equazioni
1
Si veda, per esempio, il trattato di L. Landau, L. P. Pitaevskii e E. Lifschitz, Electrodynamics of
Continuous Media, 2 edition (15 Oct 1984)
√
2
Cosicché n = εµ è l’indice di rifrazione.
81
si riferiscono naturalmente a dielettrici o conduttori immobili. Sorge dunque la questione
di generalizzarle ai corpi in moto, e in questo la relatività è di grande aiuto.
Innanzitutto postuliamo che la coppia (D, H) corrisponda al tensore Hab nello stesso modo
in cui (E, B) corrispondono al tensore Fab . È facile convincersi che le uniche equazioni
tensoriali lineari che si riducono alle (4.1) nel sistema di quiete sono, rispettivamente,
Hab U b = εFab U b
(4.3)
Fab Uc + Fca Ub + Fbc Ua = 0
(4.4)
dove U a è la quadri-velocità del dielettrico. Queste sono le equazioni costitutive di
Minkowski. Per quanto riguarda la legge di Ohm è chiaro che deve aversi
J a + U a U b Jb = σF ab Ub
(4.5)
in quanto il secondo membro è ortogonale a U . Dalle Eq. (4.3) si ottiene facilmente
D + v × H = ε(E + v × B)
Analogamente, dalle (4.4),
B − v × E = µ(H − v × D)
Eliminando B dalla prima e D dalla seconda si ottengono le formule seguenti di Minkowski
(1911)
D=
ε(1 − v 2 )E − ε(εµ − 1)(v · E)v + (εµ − 1)v × H
1 − εµv 2
µ(1 − v 2 )H − (εµ − 1)v × E − µ(εµ − 1)(v · H)v
1 − εµv 2
√
Si noti che con le nostre unità 1/ εµ è la velocità della luce nel dielettrico.
E25: Si ripristini la velocità della luce nelle formule precedenti. Si approssimino le formule tenendo conto solo dei termini di ordine zero e uno in v/c.
Per la legge di Ohm si trova facilmente la formula
B=
J = σγ(E − (v · E)v + v × B) + ρv
L’ultimo termine rappresenta la corrente di trasporto dovuta al fatto che il conduttore
mobile appare elettricamente carico e dunque J − ρv = Jc rappresenta la vera corrente di
conduzione, per la quale vale la formula
Jc = σγ(E − (v · E)v + v × B)
(4.6)
Trascurando termini quadratici in v si ha il risultato più intuitivo
Jc = σ(E + v × B)
(4.7)
82
Infatti il vettore in parentesi è la forza di Lorentz per unità di carica.
E26: Si ripristini la velocità della luce nella formula ottenuta. Si approssimi la formula
tenendo conto solo dei termini di ordine zero e uno in v/c.
E27: Si mostri che la carica acquisita dal conduttore in moto è
ρ=
1 v · Jc
c2 1 − v 2 /c2
L’effetto è dunque trascurabile.
5.5
Campo di una carica in moto rapido
Per risolvere alcuni semplici problemi di radiazione elettromagnetica useremo il metodo
delle funzioni di Green. Le soluzioni dell’equazione delle onde non omogenea
∂a ∂ a ϕ = −j(x)
si ottengono se si conosce una distribuzione G(x, y) tale che
∂ 2 G(x, y) = −δ(x − y)
(5.1)
Allora una soluzione particolare dell’equazione è
∫
ϕ(x) = G(x, y)j(y)d4 y
È facile determinare le possibili funzioni di Green; infatti la formula
∫ ik·(x−y)
e
−4
G(x, y) = (2π)
d4 k
k2
(5.2)
(5.3)
determina formalmente una soluzione della (5.1), se non fosse per le singolarità del denominatore nei vettori nulli, per cui k 2 = 0. Se consideriamo k 2 come una funzione di
k 0 , il denominatore ha poli semplici nei punti k 0 = ±|k|, e per dare senso all’integrazione
in k 0 bisogna dunque dare una regola di aggiramento dei poli. A ciascuna prescrizione
corrisponde una diversa funzione di Green. Consideriamo allora la seguente prescrizione:
si spostino i due poli leggermente al di sotto dell’asse reale nel piano complesso della
variabile k 0 , cioè si consideri l’integrale
∫
∫
eik·(x−y)
eik·(x−y) 4
−4
4
−4
G− (x, y) = (2π)
d
k
=
(2π)
dk
(5.4)
−(k 0 + iε)2 + |k|2
k 2 − 2iεk 0
dove il limite ε → 0 è sottinteso e l’integrazione in dk 0 è fatta per prima. Usando il
teorema di Cauchy si trova facilmente [esercizio]
′
G− (x, x ) =
1
′
′
′
′ 2
′ δ(t − t − |x − x |) = θ(t − t )δ((x − x ) )
4π|x − x |
83
(5.5)
dove l’ultima eguaglianza è conseguenza della nota formula
)
1 ( 0
δ(x − |x|) + δ(x0 + |x|)
2|x|
δ(x2 ) =
(5.6)
che si studia nel corso di metodi matematici per la fisica. Ci sono due aspetti notevoli
′
nella formula (5.5). Il primo è l’annullarsi di G− quando l’evento x precede x (nel tempo).
Per questo G− si chiama la funzione di Green ritardada. Il secondo è che il supporto della
distribuzione è interamente contenuto nel cono luce; cioè il campo in x è completamente
′
determinato dal valore della sorgente nei punti x del suo supporto che si trovano sul cono
luce passato uscente da x, in accordo con la richiesta di causalità e con la propagazione a
velocità finita (c in questo caso) delle onde. Esiste anche una funzione di Green avanzata
′
G+ (x, x ) =
1
′
′
′
′ 2
′ δ(t − t + |x − x |) = θ(t − t)δ((x − x ) )
4π|x − x |
(5.7)
che si ottiene spostando i poli leggermente al di sopra dell’asse reale nel piano complesso
della variabile k 0 , cioè operando la sostituzione k 2 − 2iεk 0 → k 2 + 2iεk 0 nell’integrale
(5.4).
campo di una carica veloce
Le equazioni di Maxwell per i potenziali nella gauge di Lorenz sono
2Aa = −4πJ a ,
∂ a Aa = 0
Per una sola carica la corrente è J a = eż a (t)δ (3) (x − z(t)) e dunque, in base alla (5.2), la
soluzione ritardata dell’equazione assume la forma
∫
(
) ′
1
′
′
a
a ′
A (x) = e
ż
(t
)δ
t
−
t
−
|x
−
z(t
)|
dt
|x − z(t′ )|
Il calcolo procede usando la formula (v. il punto (3) della lista in appendice A)
)−1
) (
(x − z(t− )) · ż(t− )
′
δ t − t − |x − z(t )| = 1 −
δ(t − t− )
|x − z(t− )|
(
′
′
dove t− è l’unica soluzione dell’equazione
t − t− − |x − z(t− )| = 0
Chiameremo t− il tempo ritardato; l’interpretazione fisica è ovvia: il campo al tempo
t in x dipende solamente dalla posizione della carica al tempo t− , tale che t − t− sia
esattamente il tempo richiesto alla radiazione elettromagnetica per percorrere la distanza
|x − z(t− )|. Dunque l’evento di coordinate (t− , z(t− )) sta sull’intersezione del cono luce
passato uscente da x = (t, x) (il cosiddetto punto campo) con la linea di universo della
carica, dal che si capisce la ragione della sua univoca determinazione.
84
′
Un’ultima integrazione in t fornisce il risultato finale
Aa (t, x) =
eva (t− )
,
|x − z(t− )| − (x − z(t− )) · ż(t− )
va =
dz a
dt
(5.8)
Questi sono noti come i potenziali di Lienard-Wiechert. Introducendo il quadrivettore
nullo Ra = xa − z a (t− ) = (t − t− , x − z(t− )), si può riscrivere la formula precedente nella
forma covariante
eU a
Aa (x) = −
(5.9)
Rb U b
dove U a è la quadri-velocità e si sottintende che tutto nel secondo membro va calcolato nel
tempo ritardato t− , o equivalentemente al corrispondente tempo proprio ritardato τ− . È
chiaro che τ− = τ− (x): le derivate parziali si calcolano differenziando l’identità Ra Ra = 0
0 = 2Ra ∂b Ra = 2Ra (δba − U a ∂b τ− )
da cui
∂b τ− =
Rb
Rc U c
(5.10)
Il calcolo del campo elettromagnetico procede usando la formula
Fab (x) = ∂a Ab − ∂b Aa
tenendo presente la dipendenza di τ− da x: dal risultato appena esposto, con un semplice
conto si ottiene
e
e
Fab (x) =
(Ra Ub − Rb Ua ) −
(Ra U̇b − Rb U̇a )
3
(R · U )
(R · U )2
e
+
(R · U̇ )(Ra Ub − Rb Ua )
(5.11)
(R · U )3
dove è sottinteso che tutti i termini scritti sono calcolati nel tempo ritardato τ− . Il primo
termine, decrescente come R−2 a grandi distanze è il campo Coulombiano irriducibilmente
associato ad ogni carica. La radiazione elettromagnetica propriamente detta è descritta
dai termini successivi. Si noti che decrescono con il tipico andamento Fab ∼ R−1 . Nel seguito reintrodurremo c in tutte le formule scritte nella versione tridimensionale, lasciando
c = 1 solo per le formule scritte in notazione quadri-dimensionale. Se il moto è uniforme
solo il campo di Coulomb sopravvive: dalla (5.11) si ricava facilmente
(
(1 − β 2 )
v )
EC = e
R
−
R ,
B = n × EC
(5.12)
c
(R − R · v/c)3
dove n = R/R. Si noti che il vettore R∗ = R − Rv/c connette la posizione della carica
al tempo t con il punto campo x = (ct, x), e che
√
R·v
R−
= R∗ 1 − β 2 sin2 θ
c
85
dove θ è l’angolo tra R∗ e v (si consiglia di fare un disegno dei vettori coinvolti). Dunque
si può scrivere
e(1 − β 2 )
R∗
(5.13)
2
2
3/2
(1 − β sin θ) R∗3
che è il risultato che si otterrebbe con le trasformazioni di Lorentz dal rest system. Nel
caso generale si ottiene la formula più complicata
]
[(
e
v )
E = EC + 2
R
×
v̇
(5.14)
R
×
R
−
c (R − R · v/c)3
c
EC =
B=n×E
(5.15)
dove n = R/R.
radiazione
Per discutere la radiazione emessa dalla carica omettiamo nel seguito il campo Coulombiano EC ; l’intensità emessa nell’angolo solido dΩ è, in accordo con le formule generali (si
veda l’Eq. (4.10) nella Sezione §6.4),
c 2 2
c 2 2
dI =
E R dΩ =
B R dΩ
(5.16)
4π
4π
Uno sguardo alla (5.14) mostra subito che la distribuzione angolare della radiazione deve
essere assai complicata. Nel caso in cui v e v̇ siano vettori paralleli la formula si semplifica:
si ha in tal caso (si consulti [6], §73)
e
v̇ × n
B= 2
(5.17)
c R (1 − v cos θ/c)6
e
e2
a2 sin2 θ
dI =
dΩ
(5.18)
4πc3 (1 − v cos θ/c)6
dove a = |v̇|. Il denominatore è la correzione relativistica, ma per il resto la formula
coincide con il risultato standard della radiazione dipolare. L’intensità totale è l’integrale
su θ con la misura 2π sin θdθ, e risulta essere
I=
5 + β2
Idipole
5(1 − β 2 )4
(5.19)
where
2e2 a2
3c3
è la radiazione dipolare. Se v e v̇ sono ortogonali si trova invece
[
]
e2 a2
1
(1 − β 2 ) sin2 θ cos2 ϕ
dI =
−
dΩ
4πc3 (1 − β cos θ)4
(1 − β cos θ)6
e
5 − 2β 2
I=
Idipole
5(1 − β 2 )3
Idipole =
86
(5.20)
(5.21)
(5.22)
5.6
L’equazione di Lorentz-Dirac
Si vuole considerare l’effetto delle forze di reazione sulla carica dovute all’emissione di
radiazione. Nel sistema di riferimento dove la velocità della carica è piccola, il lavoro
medio della forza per unità di tempo deve corrispondere alla potenza totale irradiata, cioè
f ·v =−
2e2 2
|v̇|
3c3
(6.1)
dove le quantità barrate sono medie temporali del tipo
∫
1 T
A = lim
f (t)dt
t→∞ T 0
Con una manipolazione “alla Landau-Lifschitz” scriviamo
2e2 d
2e2
f · v = − 3 (v · v̇) + 3 v · v̈
3c dt
3c
(6.2)
Dobbiamo considerare una situazione in cui la funzione v · v̇ sia limitata, cosicché la
media temporale della sua derivata si annulli. Resta allora il secondo termine, che è
consistente con la presenza di una forza istantanea di reazione che dipende dalla derivata
dell’accelerazione
f=
2e2
v̈
3c3
(6.3)
La derivazione data qui di questa espressione non può che considerarsi euristica. Infatti le
forze di reazione nascono dagli effetti della radiazione emessa all’ordine (v/c)3 , e dunque
bisognerebbe mostrare che i contributi ai campi di radiazione dei termini di ordine (v/c)n ,
con n > 3, tendono tutti a zero in prossimità della carica elettrica nel sistema istantaneo
di quiete. Poiché questo si verifica ( vedere [6], §75), l’espressione (6.3) per una singola
carica è esatta nel sistema di quiete.
Poniamo
t0 =
2e2
3mc3
In elettrodinamica classica si introduce il raggio classico dell’elettrone con l’espressione
r0 =
e2
≃ 10−13 cm
mc2
Dato che la massa propria elettromagnetica di una carica puntiforme è infinita, cioè l’integrale che dà l’energia del suo campo elettrostatico diverge, si ritiene che r0 definisca il
limite di applicabilità dell’elettrodinamica classica, in quanto l’energia propria osservata
di una particella puntiforme è mc2 , non infinito. Allora t0 ∼ 10−24 s è il tempo che impiega la luce ad attraversare il raggio classico dell’elettrone e, come per r0 , definisce la scala
temporale che limita l’applicabilità dell’elettrodinamica classica alle particelle elementari.
87
Si noti che per un protone queste scale sono duemila volte più piccole, ma va detto che
un protone non è propriamente un oggetto elementare puntiforme. Ora l’equazione del
moto di una carica libera a bassa velocità sarebbe
t0 v̈ − v̇ = 0
(6.4)
la quale, oltre alla soluzione standard v = costante, ammette anche la soluzione di fuga
v = bet/t0
descrivente una particella che si auto-accelera per emissione di radiazione. Si potrebbe
porre b = 0 arbitrariamente, ma questo non è possibile se la velocità iniziale è diversa da zero. Dunque una particella, dopo avere attraversato un campo, dovrebbe autoaccelerarsi indefinitamente. L’assurdità di questo risultato richiede ovviamente una discussione più approfondita, cui accenneremo più avanti. Qui notiamo solo che ancora una
volta si trova che l’elettrodinamica classica non sembra essere una teoria del tutto priva
di contraddizioni.
Per includere questa forza nelle equazioni del moto relativistiche di una carica in un campo
esterno si deve trovare l’espressione relativistica della forza di reazione. È facile vedere
che l’unico quadri-vettore che nel sistema di quiete si riduce all’eq. (6.3) ed è ortogonale
alla quadri-velocità (come tutte le forze relativistiche pure) è
fa =
)
2e2 ( a
δb + c−2 U a Ub Ü b
3
3c
(6.5)
Infatti nel rest system Ü b = (a2 , v̈). Si ha in questo modo l’equazione del moto di
Lorentz-Dirac
U̇ a =
e a b
2e2
F bU +
(δ a + U a Ub ) Ü b
mc
3mc3 b
(6.6)
Notiamo che per un elettrone il coefficiente del secondo termine è t0 ∼ 10−24 s, e dunque
che la forza di frenamento dovrebbe rappresentare una piccola perturbazione della forza
esterna. In realtà occorrono altre due condizioni [6]: la prima è che la lunghezza d’onda
del campo esterno sia λ ≫ r0 , la seconda che l’intensità dei campi sia piccola nel senso che
E, B ≪ m2 c4 /e3 [6]. Se questa è soddisfatta, è talvolta conveniente esprimere le derivate
Ü a in funzione dei campi esterni
e2 a b c
e
F F U
mÜ a = ∂c F ab U b U c +
c
mc2 b c
(6.7)
Sostituendo nella (6.6) si trova infine la formula
mU̇ a =
e a b
3
3
F b U + et0 (∂c F ab )U b U c + ct20 (F db F bc U c Ud )U a + ct20 F ab Fbc U c
c
2
2
(6.8)
dove si vede che la retro-azione del campo sulle cariche è quadratica nei campi, dunque trascurabile se le intensità dei campi sono sufficientemente piccole, come indicato
88
sopra. Con campi di ordine |Fab | ∼ m2 c4 /e3 l’elettrodinamica classica non è più applicabile. I campi limite sono d’altronde molto intensi, per un elettrone essendo dell’ordine di
1018 Volt/m! Notiamo che il secondo termine è trascurabile rispetto al primo se vt0 ≪ λ,
e sarà soddisfatto per particelle relativistiche se ct0 ∼ r0 ≪ λ, che è la condizione scritta
sopra.
caso non relativistico
Per comprendere alcune implicazioni dell’equazione di Lorentz-Dirac, consideriamola nel
caso non relativistico, dove per una forza esterna generica essa prende la forma
v̇ − t0 v̈ = m−1 Fext
(6.9)
Questa è l’equazione di Abraham-Lorentz. Con la condizione asintotica naturale,
lim a(t) = 0,
t→−∞
si ha l’accelerazione
]
[
∫ t
1
t/t0
−u/t0
a(t) = e
Fext (u)e
du
b−
mt0 −∞
(6.10)
Il primo termine è la “runaway solution” vista sopra, che si può solo eliminare con la
scelta ad hoc b = 0, in generale non permessa. Inoltre a(t) dipende dal valore della forza
nei tempi precedenti a t, il prezzo che si paga se si vuole eliminare ȧ dall’equazione del
moto. Infine, scritta com’è, la (6.10) non ammette il limite t0 → 0, nonostante t0 sia
estremamente piccolo. Vogliamo vedere se si può imporre la condizione che il limite esista
e fornisca la relazione newtoniana a(t) = Fext (t)/m: a tale scopo poniamo formalmente
∫ ∞
1
Fext (u)e−u/t0 du
b=
mt0 −∞
nell’eq. (6.10). Si ottiene il risultato interessante
∫
et/t0 ∞
a(t) =
Fext (u)e−u/t0 du
mt0 t
(6.11)
Per eliminare il termine singolare in 1/t0 conviene passare alla variabile t0 s = u − t: allora
∫ ∞
ma(t) =
Fext (t + t0 s)e−s ds
(6.12)
0
Il limite t0 → 0 ora esiste e fornisce la formula di Newton; dunque la (6.12) può considerarsi come una ragionevole riformulazione del problema del frenamento per emissione di
radiazione. Si noti però il carattere acausale dell’equazione: a(t) dipende dai valori della
forza in tempi posteriori a t!
89
Capitolo 6
Principi variazionali
L’elettrodinamica è un esempio concreto di teoria dei campi, ma non è il solo. Allo scopo
di costruire teorie invarianti di Lorentz, è estremamente conveniente usare un principio
variazionale di minima azione, in cui le equazioni del moto per i campi ϕ si deducono
dalla condizione di stazionarietà di un funzionale della forma
∫
I[ϕ] = L[ϕ, x]d4 x
(0.1)
Terminologia: i campi ϕ hanno in generale molte componenti che indichiamo con ϕA (x),
con la notazione ∂ϕ intendiamo il campo le cui componenti sono ∂a ϕA (x), I[ϕ] è l’azione
ed L[ϕ, x] è la densità (cioè una quantità che si può integrare) lagrangiana. Per i nostri
scopi la lagrangiana è una funzione dei campi e delle coordinate del tipo
L[ϕ, x] = L(ϕ(x), ∂ϕ(x), x)
′
che possiede la proprietà di invarianza relativistica seguente: se indichiamo con ϕA (x) il
campo che risulta da una trasformazione di Poincarè (Lorentz e traslazioni), si ha
( ′
)
(
)
′
L ϕA (x), ∂a ϕA (x), x = L ϕA (Λ−1 (x − a)), ∂a ϕA (Λ−1 (x − a)), Λ−1 (x − a)
(0.2)
Ovvero L[ϕ, x] è invariante per trasformazioni di Lorentz. La richiesta serve naturalmente
a garantire la covarianza delle equazioni del moto. Infatti dalla (0.2) discende subito che
l’azione è invariante
′
I[ϕ ] = I[ϕ]
in quanto la misura di integrazione d4 x è invariante di Lorentz. Nel seguito assumeremo
che le formule di trasformazione dei campi siano lineari
∑
′
B
[Λ]ϕB (Λ−1 x)
(0.3)
ϕA (x) =
DA
B
′
Per le traslazioni pure si ha Λ = 1 e ϕ (x) = ϕ(x − a), cosicché la (0.2) sarà soddisfatta se
L[ϕ, x] = L[ϕ], cioè se la lagrangiana non dipende dalle coordinate in maniera esplicita.
90
6.1
Equazioni di Eulero e Lagrange
Se una “piccola” variazione, δϕA (x), di una data configurazione ϕA (x), non cambia il
valore di I al primo ordine in δϕA (x), si dice che l’azione è stazionaria nel “punto” ϕA (x).
In questo caso si ha
∫
δI
δI =
δϕA (x) d4 x = 0
δϕA (x)
Se le variazioni δϕA (x) sono arbitrarie e tra loro indipendenti, si ottiene la condizione
δI
=0
(1.1)
δϕA (x)
Questa espressione si chiama la derivata variazionale di I. La derivata variazionale
δF/δϕ(x) di un funzionale F [ϕ] è, per definizione, il coefficiente di δϕ(x) nell’espressione
della variazione prima δF
∫
δF
δF =
δϕ(x) d4 x
δϕ(x)
Se F dipende dalle derivate di ϕ(x), come nel caso dell’azione, il calcolo della derivata
variazionale comporta in generale una o più integrazioni per parti. Per calcolare la derivata
variazionale di I[ϕ] si noti che
)
∫ (
∂L
∂L
δI =
δϕA +
∂a δϕA d4 x
(1.2)
∂ϕA
∂∂a ϕA
Possiamo scegliere variazioni arbitrarie a supporto compatto (cioè nulle al di fuori di un
insieme chiuso e limitato). In tal caso, integrando per parti il secondo termine e usando
il teorema di Gauss per eliminare il termine di bordo, si ottiene facilmente
)
∫ (
∂L
∂L
δI =
− ∂a
δϕA d4 x
(1.3)
∂ϕA
∂∂a ϕA
La condizione di stazionarietà (1.1) prende allora la forma
δI
∂L
∂L
≡
− ∂a
=0
(1.4)
δϕA (x)
∂ϕA (x)
∂∂a ϕA (x)
Queste sono le equazioni di Eulero e Lagrange per i campi. Si noti che dall’invarianza
dell’azione segue automaticamente la covarianza delle equazioni del moto, in quanto
∑
δI
δI
A
DB
[Λ] ′ =
δϕA
δϕB
B
La lagrangiana è determinata solo parzialmente dalle equazioni del moto di una teoria,
perché il passaggio da L[ϕ] a
L1 [ϕ] = L[ϕ] + ∂a F a (ϕ(x))
non modifica le equazioni del moto. Questo si può vedere direttamente sostituendo L1
nelle equazioni di Eulero-Lagrange, oppure notando che la divergenza non contribuisce alla
variazione dell’azione se si usa il teorema di Gauss per eliminarla dal principio variazionale.
91
campo scalare
Un semplice esempio del formalismo Lagrangiano è fornito dalla teoria del campo scalare.
Una Lagrangiana invariante è
1
1
1
L(x) = − ∂a Φ∂ a Φ − U (Φ) = Φ̇2 − |∇Φ|2 − U (Φ)
(1.5)
2
2
2
dove U (Φ) è una funzione potenziale. Nell’ultima espressione, il primo termine è l’analogo
dell’energia cinetica e il secondo è richiesto dalla covarianza relativistica (il primo termine
da solo non è invariante di Lorentz). Conviene isolare in U (Φ) il termine quadratico,
1
U (Φ) = m2 Φ2 + V (Φ)
2
La costante m è una massa nelle unità ℏ = c = 1; nelle unità comuni si dovrebbe fare la
sostituzione m → mc/ℏ. Le equazioni di Eulero-Lagrange sono
−∂a ∂ a Φ + m2 Φ = −
∂V (Φ)
∂Φ
e si riducono all’equazione di Klein-Gordon se manca il potenziale.
l’equazione ammette le onde piane
In questo caso
Φ = A exp(±ipa xa )
dove p2 + m2 = 0. Questa è la formula soddisfatta dal quadrimpulso di una particella,
ed è in accordo con la teoria quantistica, secondo la quale l’onda piana è associata alle
particelle con impulso ed energia determinati e che per tale motivo sono completamente
de-localizzate.
6.2
Azione per il campo elettromagnetico
Le equazioni di Maxwell sono del primo ordine nei campi elettromagnetici e del secondo
ordine nei potenziali Aa , e quindi considereremo le componenti del campo Aa (x) come
le variabili dinamiche della teoria (le sue coordinate generalizzate, come si direbbe nel
linguaggio Lagrangiano). È dunque essenziale che l’azione sia invariante di gauge, oltre
che invariante di Lorentz.
Esistono due invarianti quadratici che si possono costruire con il tensore Fab . Essi sono
F 2 ≡ Fab F ab = 2(B2 − E2 )
(2.1)
e
∗ ab
F Fab = 2E · B
(2.2)
dove
∗ ab
F
1
= eabcd Fcd
2
92
è il cosiddetto tensore duale. Questo invariante è però una divergenza quadridimensionale
(
)
∗ ab
F Fab = ∂a eabcd Fbc Ad
e può quindi essere omesso. Il primo ha i requisiti necessari per essere usato come una
Lagrangiana, e dunque scriviamo l’azione
∫
1
Iem = −
Fab F ab d4 x
(2.3)
16π
Il segno negativo si capisce guardando la (2.1), secondo la quale F 2 contiene le derivate
temporali di A (cioè l’energia cinetica del campo) con segno negativo. Il fattore di normalizzazione è dovuto alla nostra scelta di usare le unità Gaussiane non razionalizzate.
Dato che Iem non contiene le cariche elettriche, si può interpretare Iem come l’azione per
il campo elettromagnetico libero.
Dalle equazioni di Maxwell (1.6) segue che l’azione deve anche contenere il termine lineare
in Aa 1
∫
Iin = Aa J a d4 x
(2.4)
dove J a è la corrente elettrica, che assumeremo indipendente dal campo Aa (x). È Iin
invariante di gauge? La sostituzione Aa → Aa + ∂a ψ trasforma Iin in
∫
∫
a 4
Iin + ∂a ψJ d x = Iin − ψ∂a J a d4 x
come segue dal teorema di Gauss se ψ si annulla all’infinito. Vediamo che l’azione è invariante di gauge se e solo se la corrente è conservata: ∂a J a = 0. Si può quindi considerare
la conservazione della carica elettrica come una conseguenza dell’invarianza di gauge.
Sia infine Im l’azione che descrive la materia elettricamente carica, che assumeremo
indipendente dal campo Aa (x). L’azione completa è
∫
∫
1
ab 4
I=−
Fab F d x + Aa J a d4 x + Im
(2.5)
16π
È adesso facile vedere che le equazioni di Eulero-Lagrange per il potenziale Aa (x) riproducono la seconda coppia delle equazioni di Maxwell (si ricordi che la prima coppia
segue direttamente dalla definizione (1.1)). Forse, più semplicemente, si può verificare la
formula
)
∫ (
1
ab
b
δI =
∂a F + J δAb d4 x
4π
da cui seguono le equazioni, purché si considerino le variazioni δAb come arbitrarie e
indipendenti tra loro.
1
In certe teorie vi possono essere accoppiamenti quadratici nei potenziali, essenzialmente dovuti al
fenomeno del diamagnetismo.
93
6.3
Azione per le particelle
L’azione Im non è altrettanto univocamente determinata, perché ovviamente dipende
dal modello di materia che si vuole adottare, e anche dal sistema fisico concreto che si
vuole considerare. Ad esempio un fluido elettricamente carico, uno sciame di particelle
puntiformi o un campo scalare complesso hanno tutti la propria azione particolare. Per gli
scopi dell’elettrodinamica classica è giustificato considerare le particelle puntiformi come
un modello sufficientemente adeguato. Vale allora la formula (2.5), che sostituita in Iin
dà immediatamente
∑ ∫
Iin =
en Aa (zn )dzn
n
ciascun integrale essendo esteso alla linea di universo della carica corrispondente. Per
quanto riguarda l’azione libera (il termine Im della (2.5)), se le particelle hanno massa
non nulla si può adottare l’azione2
∫ √
∑
∑ ∫
∑ ∫ √
Im = −
mn
−żn2 dp = −
mn dτn = −
mn dt 1 − vn2
(3.1)
n
n
n
Si passa dalla prima forma alla seconda ponendo p =√τn , nel qual caso żn2 = −1, e dalla
seconda alla terza usando la nota espressione dτ = dt 1 − v 2 . Si noti che la Lagrangiana
per una particella
√
1
L = −m 1 − v 2 = −m + mv2 + · · ·
2
fornisce la quantità di moto
p=
mv
∂L
=√
∂v
1 − v2
e l’energia
E =v·
∂L
m
−L= √
∂v
1 − v2
in accordo con la definizione di queste grandezze adottata in meccanica relativistica.
Limitandosi ad una sola particella, la variazione di Im rispetto a z a si può scrivere nella
forma
∫ 2 a
dz
δza dτ
(3.2)
δIm = −m
dτ 2
e
∫
dz b
δIin = e F ab (z)
δza dτ
dτ
2
ż = dz/dp, ż 2 = ża ż a e mn sono le masse proprie.
94
Dal principio variazionale δI = 0, con il potenziale Aa tenuto fisso, si ottengono cosı̀ le
equazioni del moto della carica nel campo elettromagnetico
dpa
dz a
= eF ab (z)ub ,
ua =
(3.3)
dτ
dτ
dove, come al solito, pa = mua è il quadri-impulso della particella. Queste equazioni sono
manifestamente covarianti. Riscrivendole per esteso si ha
(
)
d
mv
√
= e(E + v ∧ B)
(3.4)
dt
1 − v2
d
dt
(
m
√
1 − v2
)
= eE · v
(3.5)
e ritroviamo le equazioni del moto (4.4). Vediamo che la trattazione relativistica conduce
necessariamente alla formula della forza di Lorentz, che nelle vecchie trattazioni era invece
semplicemente postulata.
6.4
Il tensore energia-impulso
L’indipendenza della Lagrangiana dalle coordinate ha una importante conseguenza di
principio, il teorema di conservazione del quadri-impulso.
6.4.1
Caso generale
Se L(x) non dipende esplicitamente3 da xa , si ha
(
)
(
)
∂L
∂L
∂L
∂L
∂L
∂a L =
∂a ϕ A +
∂b ∂a ϕ A =
− ∂b
∂a ϕ A + ∂b
∂a ϕA
∂ϕA
∂∂b ϕA
∂ϕA
∂∂b ϕA
∂∂b ϕA
Se le equazioni di Eulero-Lagrange risultano soddisfatte, questa equazione si riduce alle
quattro condizioni
∂a T ab = 0
(4.1)
in cui
T ab = δba L −
∂L
∂b ϕ A
∂∂a ϕA
(4.2)
T ab si chiama il tensore energia-impulso canonico, e l’Eq. (4.1) è la sua legge di conservazione. Dal teorema di Gauss (2.8) si ottengono le costanti del moto (ripristinando
c)
∫
dPa
1
Pa =
T 0a (x0 , x)d3 x,
=0
(4.3)
c
dx0
3
′
Cioè se vale la (0.2) con Λ = 1, tenendo conto che ϕ (x) = ϕ(x − a).
95
Queste rappresentano il quadrimpulso del campo sull’iperpiano a x0 fissato. Per esempio
−T 00 = ∂0 ϕA
∂L
−L
∂∂0 ϕA
(4.4)
è manifestamente la densità di energia4 , e dunque −cP0 è l’energia, in accordo con le
proprietà generali del quadrimpulso. È molto importante osservare che le grandezze Pa
sono non solo conservate, ma determinano anche le componenti di un quadrivettore (v.
appendice). Per finire, notiamo che in generale il tensore canonico non è simmetrico,
perciò definiamo
T ab = T ac η cb
ambiguità di Tab
La non univocità della Lagrangiana si riflette ovviamente sulla forma del tensore T ab .
Oltre a questo però, esiste anche un’ambiguità di carattere più profondo che vogliamo ora
descrivere. Si consideri il nuovo tensore energia-impulso
1
T ab = T ab + ∂c Fbac ,
Fbac = −Fbca
(4.5)
dove Fbac è una funzione tensoriale dei campi, antisimmetrica in a e c. Allora la legge
di conservazione (4.1) rimane valida. Dal teorema di Gauss segue che il quadrimpulso
totale non cambia se Fbac (x) si annulla in maniera talmente rapida da annullare il suo
flusso attraverso i bordi all’infinito. La possibilità di ridefinire il tensore energia-impulso
in questo modo non è un fatto deprecabile, perché può utilmente essere usata per renderlo
simmetrico: T ab = T ba , proprietà che assumeremo valida da ora in poi. In questo caso, il
tensore del “momento angolare”
M abc = T ab xc − T ac xb
risulta anch’esso conservato
∂a M abc = T cb − T bc = 0
(4.6)
Le costanti del moto
∫
ab
J = M 0ab (x0 , x)d3 x = −M ba
(4.7)
rappresentano la versione relativistica del momento angolare. Un altro caso dove la non
univocità del tensore energia-impulso risulta essenziale, si ha per il campo elettromagnetico, dove può essere impiegata per ripristinare l’invarianza di gauge, apparentemente
violata dal tensore canonico.
significato delle componenti di Tab
4
Si ricordi che L è una densità Lagrangiana, e che la formula per l’energia in una teoria con Lagrangiana
L è E = q̇∂L/∂ q̇ − L.
96
Abbiamo già notato che T 00 è la densità di energia e c−1 T 0k ≡ Gk la densità della quantità
di moto. Integrando la legge di conservazione
∂0 T 00 = −∂k T k0
su un volume spaziale V si ottiene (ripristinando c)
∫
∫
dEV
d
00
=
T dx = −c
T k0 nk da
dt
dt V
∂V
dove EV è l’energia nel volume V . Quindi le componenti cT k0 ≡ S k rappresentano il flusso
di energia nella direzione k (x, y oppure z). Analogamente, dalla legge di conservazione
della quantità di moto in un volume V
∫
∫
dPVk
d1
0k
=
T dx = −
T jk nj da
dt
dt c V
∂V
vediamo che le componenti T jk rappresentano il flusso della k-esima componente dell’impulso nella j-esima direzione. Le T jk sono a volte chiamate le componenti del tensore
degli sforzi, perché il flusso di impulso attraverso una superficie determina la forza agente
sulla medesima.
Come sopra, sia G il vettore (tridimensionale) di componenti c−1 T 0k e S quello di componenti cT k0 . Se il tensore energia-impulso è simmetrico si ha, dunque
1
G = 2S
(4.8)
c
un risultato noto come teorema di Planck : ad ogni corrente di energia è associato un trasporto di quantità di moto. La (4.8) è una versione generalizzata del teorema di equivalenza
massa-energia.
Consideriamo ora il tensore energia-impulso di alcuni sistemi fisici importanti.
6.4.2
Campo scalare
La Larangiana (1.5) e la (4.2) conducono subito alla formula
Tab = ∂a Φ∂b Φ + ηab L
Ad esempio, se il campo è spazialmente uniforme, cioè se Φ(x) = ϕ(t), il tensore degli
sforzi è isotropo (includiamo il termine di massa in V (ϕ))
)
1 ( 2
Tjk = δjk ϕ̇ − V (ϕ) = δjk p
2
Il coefficiente di δjk può essere interpretato come la pressione (v. sotto). Inoltre T0j = 0
e l’energia
1
T00 = ρ = ϕ̇2 + V (ϕ)
2
Si noti che il tensore è simmetrico, Tab = Tba . Nel caso generale la densità di impulso è
G = −Φ̇∇Φ
97
6.4.3
Campo elettromagnetico
La definizione (4.2) applicata alla Lagrangiana del campo elettromagnetico libero
L=−
1
Fab F ab
16π
determina il tensore canonico
(
)
1
1
a
ac
nm a
Tb=
F ∂b Ac − Fnm F δ b
4π
4
(4.9)
che, come si può vedere, non è invariante di gauge.
sommiamo la quadri-divergenza
−
Sfruttando l’arbitrarietà (4.5),
1
∂c (F ac Ab )
4π
Usando le equazioni del moto ∂c F ac = 0 si ottiene il tensore invariante di gauge
(
)
1
1
a
ac
nm a
Tb=
F Fbc − Fnm F δ b
4π
4
(4.10)
Esplicitandone le componenti troviamo la densità e il flusso di energia (anche uguale alla
densità di impulso G)
T 00 =
1
(E2 + B2 ),
8π
S=
1
(E ∧ B)
4π
(4.11)
e il tensore degli sforzi di Maxwell
(
)
1
1
1
2
2
Tik =
−Ei Ek + δik E − Bi Bk + δik B
4π
2
2
(4.12)
Osserviamo che il quadrimpulso elettromagnetico
∫
Pa = T 0a (x0 , x)dx
non può essere un vettore di tipo spaziale, perché in tal caso sarebbe possibile annullare P0
con una trasformazione di Lorentz. Ma questo comporta l’annullarsi dei campi. Dunque
P 2 ≤ 0, ossia
∫
E
1
|P| ≤ P0 = ,
E=
(E2 + B2 ) dx
c
8π
Valgono le formule di trasformazione
′
Px =
Px − (v/c2 )E
√
,
1 − β2
′
P y = Py ,
′
Pz = Pz ,
98
E − vPx
′
E =√
1 − β2
(4.13)
Se P 2 = 0 e se α è l’angolo, misurato in F , tra la direzione di propagazione del raggio di
′
luce e la velocità di F rispetto a F , otteniamo dalla (4.13) la formula di Einstein
1 − β cos α
′
E
E = √
1 − β2
Se invece P a è di tipo tempo, P 2 < 0, esiste sempre un sistema di coordinate F0 in cui
P0 = 0. Se E0 è il valore dell’energia totale in F0 , segue dalle (4.13) che in F
E=√
E0
1−
β2
,
P=
v
E
c2
dove v è la velocità di F0 rispetto ad F . Un esempio di questo caso è un’onda sferica di
spessore finito.
Se σ è la superficie di un dielettrico con normale esterna n, la forza esercitata dal campo
sull’elemento di superficie dσ è
dfi = −Tik nk dσ
Per questo a volte è il tensore σik = −Tik ad essere chiamato tensore degli sforzi elettromagnetici. Si dovrebbe anche osservare che la traccia si annulla
ηab T ab = 0
ma sul significato di questa equazione non ci addentriamo. Il tensore (4.10) soddisfa alla
legge di conservazione (4.1) (o, come si usa dire, è conservato), solo in assenza di correnti
e cariche. Calcolando la divergenza del tensore e usando le equazioni di Maxwell, si trova
infatti la formula importante
∂a T ab = −F bc J c
(4.14)
La componente temporale è l’equazione del bilancio energetico
∂T 00
+ div S = −E · J
∂t
dove S = E ∧ B/4π è il vettore di Poynting, cioè le componenti T k0 del tensore energiaimpulso. Le rimanenti equazioni esprimono la densità della forza di Lorentz attraverso la
divergenza di un tensore.
6.4.4
Fluido perfetto
L’idrodinamica relativistica presenta un interesse di principio, perché dovrebbe essere
applicata non solo quando è relativistica la velocità macroscopica del fluido, ma anche
quando è tale la velocità microscopica delle particelle nel fluido. Sia µ = mn0 la densità
di massa del fluido, dove n0 rappresenta il numero di particelle per unità di volume proprio
99
del fluido ed m è la massa propria delle particelle. Se epsilon è l’energia interna per unità
di massa e s l’entropia per unità di massa, la ben nota relazione termodinamica (valida
nel sistema di coordinate dove un elemento di volume del fluido è in quiete)
p
dϵ = T ds + 2 dµ
(4.15)
µ
mostra che se il moto del fluido è isoentropico, ds = 0, si possono considerare epsilon e p
come funzioni univoche di µ. L’energia interna e la pressione sono allora
ρ = µ + µϵ(µ),
p = µ2
dϵ
dµ
La condizione ds = 0 si può scrivere nella forma
(
)
ρ+p
1
T ds = d
− dp = 0
µ
µ
(4.16)
Faremo uso di questa relazione in seguito. Determiniamo ora il tensore energia-impulso
del fluido isoentropico (o perfetto). Nel sistema di coordinate dove un elemento di volume
del fluido è in quiete, la forza per unità di superficie che il fluido esercita sul bordo
dell’elemento vale pn, dove n è la normale esterna e p è la pressione idrostatica (legge di
Pascal). Inoltre T 0j = 0, perciò il tensore energia-impulso ha la forma
ρ 0 0 0
0 p 0 0
0
Tab =
(4.17)
0 0 p 0
0 0 0 p
L’unico tensore che nel sistema di quiete si riduce a 0 Tab e che dipende solamente dalla
velocità del fluido ma non dalle sue derivate (come nel caso di fluidi viscosi) è
Tab = (ρ + p)ua ub + pηab
(4.18)
dove ua è il campo di quadrivelocità del fluido. Per le componenti abbiamo (ripristinando
c)
T 00 =
ρ + pv 2 /c2
,
1 − v 2 /c2
T 0i =
(ρ + p)v i /c
,
1 − v 2 /c2
T ij =
ρ + p vivj
+ pδ ij
2
2
2
1 − v /c c
Si noti l’identità ua T ab = −ρub . La traccia è
T aa = 3p − ρ
(4.19)
Gli autovalori del tensore degli sforzi, cioè le pressioni principali, non sono necessariamente
positivi. Ad esempio, per un campo magnetico lungo x, By = Bz = 0, si ha
ρ 0 0 0
0 −ρ 0 0
Tab =
0 0 ρ 0
0 0 0 ρ
dove ρ = B 2 /8π è la densità di energia. Una pressione negativa (tensione) agisce lungo x.
100
(a) limite non relativistico
Nel trattare il limite non relativistico non è sufficiente ignorare i termini di ordine v/c
o superiori. Bisogna infatti notare che ρ contiene l’energia di quiete µc2 , dove µ = mno
è la densità di massa propria delle particelle del fluido, mentre la densità di massa non
relativistica si riferisce all’unità di volume in movimento con il fluido. Si deve dunque
porre
µ0
µ= √
1−
v2
c2
= µ0 +
µ0 v 2
+ ···
2c2
e poi passare al limite c → ∞, dove µ0 è la densità di massa non relativistica usuale. Inoltre
sia la pressione che l’energia interna epsilon(µ) sono trascurabili rispetto all’energia di
quiete µc2 . In questo modo si ottengono le formule
1
T 00 − µo c2 = µ0 v 2 + µ0 ϵ
2
c−1 T 0j = µ0 v j
T jk = µ0 v j v k + pδ jk
Il flusso di energia è cT j0 , e vale
)
(
v2
p
2
S − µ0 c v = µ0 ϵ +
+
v
µ0
2
Queste espressioni coincidono con i risultati della meccanica dei fluidi non relativistica
(v. Cap. [1] del testo di L. D. Landau e E. M. Lifshitz, Fluid Mechanics: Volume 6 (Course
of Theoretical Physics), Butterworth-Heinemann, Second Edition, (1987))
(b) equazioni del moto
L’equazione di conservazione
∂a T ab = 0
contiene le equazioni del moto relativistiche del fluido. Infatti, derivando il tensore si
ottiene
(ρ + p)ub
∂(ρ + p)ub
∂p
∂ua
+
u
=− a
a
b
b
∂x
∂x
∂x
(4.20)
Contraendo con ua si ottiene la formula
∂a ((ρ + p)ua )) = ua ∂a p
(4.21)
101
e quindi l’equazione del moto prende la forma
∂p
∂ua
=
−
− ua ub ∂b p
(4.22)
∂xb
∂xa
e nel limite non relativistico si riduce alle ben note equazioni di Eulero. Dobbiamo ancora
imporre la condizione che il moto sia isoentropico. Riscriviamo la (4.21) nella forma
(
)
ρ+p
ρ+p
1
a
u ∂a
− u a ∂a p +
∂a (µua ) = 0
(4.23)
µ
µ
µ2
(ρ + p)ub
Dalla (4.16) si vede che i primi due termini si elidono, e si ottiene l’equazione di continuità
∂(µua )
=0
∂xa
(4.24)
Se invece assumiamo l’equazione di continuità la (4.23) diventa
(
)
ρ+p
1
a
u ∂a
− u a ∂a p = 0
µ
µ
che è equivalente alla condizione T µua ∂a s = 0. Introducendo l’entropia per unità di
volume, σ = µs, e usando nuovamente la (4.24) si ottiene l’equazione di continuità per la
corrente di entropia
∂a σua
=0
∂xa
6.4.5
Particelle libere
√
0
1 − v 2 , e la quantità di moto è
L’energia di una particella
libera
è
p
=
mγ
=
m/
√
j
j
j
2
p = mγv = mv / 1 − v , quindi la densità di energia di un sistema di particelle è
∑ mn
∑∫
00
(3)
0
√
T (x) =
δ (x − zn (x )) =
δ (4) (x − zn (p)) p0n dzn0
(4.25)
2
1
−
v
n
n
n
e la densità della quantità di moto è
∑ mn v j
∑∫
n
0j
(3)
0
√
T =
δ (x − zn (x )) =
δ (4) (x − zn (p)) pjn dzn0
2
1 − vn
n
n
Come abbiamo spiegato, il flusso di energia è
∑ mn v j
∑∫
n
j0
(3)
0
√
T =
δ (x − zn (x )) =
δ (4) (x − zn (p)) p0n dznj
2
1
−
v
n
n
n
(4.26)
(4.27)
e siccome pjn dzn0 = p0n dznj , vediamo che T 0j = T j0 . Infine, dalla (4.26) segue la formula
per il flusso di quantità di moto
∑∫
∑ mn v j
n
(3)
0
k
kj
√
(4.28)
δ (4) (x − zn (p)) pjn dznk
δ (x − zn (x ))vn =
T =
2
1
−
v
n
n
n
102
Le formule scritte sono le componenti del tensore
∑
T ab (x0 , x) =
pan vnb δ (3) (x − zn (x0 ))
(4.29)
n
dove vna = dzna /dx0 . Come sopra possiamo usare un parametro invariante e scrivere
∑∫
dz b
ab
T (x) =
dp δ (4) (x − zn (p)) pan n
(4.30)
dp
n
dove pan è il quadrimpulso considerato come una funzione di p (e non mn dzna /dp). Per la
traccia si ottiene, usando per esempio la (4.29)
∑
√
T =−
mm 1 − vn2 δ (3) (x − zn (x0 ))
(4.31)
n
La media spaziale sull’unità di volume è negativa
∫
∑
√
T dx = −
mm 1 − vn2 < 0
n
Calcoliamo la divergenza del tensore energia-impulso nei due casi seguenti: (a) le particelle
si muovono sotto l’azione di un campo elettromagnetico, (b) le particelle sono libere
eccetto che per occasionali collisioni localizzate. Nel caso (a) si ha, usando per convenienza
la (4.30) con p = τn ,
∑∫
dpb
ab
∂a T (x) =
dτn δ (4) (x − zn (τn )) n =
dτn
n
∫
∑
=
en dτn δ (4) (x − zn (τn )) F bc (zn )ucn = F bc (x)J c (x)
(4.32)
n
Se Fab = 0 il tensore è conservato e il quadrimpulso pn è costante. Nel caso (b) supponiamo
che le particelle n e m abbiano una collisione a τn = τm = τc : allora
dpn
= ∆pn δ(τn − τc ),
dτn
dpm
= ∆pm δ(τm − τc )
dτm
dove ∆pn (∆pm ) è la variazione di quadrimpulso della particella n (m) nella collisione.
Allora
∑∫
dpb
ab
∂a T (x) =
dτn δ (4) (x − zn (τn )) n = δ (4) (x − z(τc ))∆(pbn + pbm )
dτn
n
dove z(τc ) = zn (τc ) = zm (τc ) è il punto dove avviene la collisione. Vediamo che la conservazione di T ab è equivalente alla legge di conservazione del quadrimpulso nelle collisioni.
Il caso con più collisioni si generalizza facilmente.
Le equazioni (4.14) e (4.32) danno le leggi di conservazione per un sistema chiuso di
cariche e campi
)
( ab
ab
=0
(4.33)
+ Tmat
∂a Tem
103
Capitolo 7
Teoria della gravitazione
La relatività ristretta è basata sull’assunzione della completa equivalenza di tutti i sistemi
di riferimento inerziali. È certamente insoddisfacente, anche da un punto di vista epistemologico, che solamente tali sistemi siano considerati equivalenti, o almeno che non sia
data una ragione logica per escludere tutti gli altri. Questo difetto è rimosso dalla teoria
della relatività generale, oggetto di questo corso. La relatività generale è la teoria di spazio, tempo e gravitazione formulata da Einstein nel 1915. Essa è largamente considerata
come una teoria matematica astrusa, e infatti solitamente si insegna solo all’università. Il
linguaggio matematico naturale della teoria è la geometria differenziale delle varietà lorentziane, varietà che ammettono una metrica con tre autovalori positivi e uno negativo,
e che non possiedono, in generale, la struttura di spazio vettoriale comunemente associata
allo spazio-tempo di Minkowski. La connessione di queste strutture matematiche con la
fisica è dovuta al genio di Einstein, e afferma che ogni varietà del tipo indicato rappresenta
il modello matematico di un possibile continuum spazio-temporale, con la metrica che ne
descrive allo stesso tempo la struttura causale, la misura delle grandezze geometriche e
il campo gravitazionale che, come sappiamo dai tempi di Newton, dipende dalla presenza
della materia.
Ne consegue che la geometria dello spazio-tempo non può essere assegnata a priori (come
avviene in relatività ristretta o nella fisica classica, dove la geometria è quella di Euclide
che si impara sui banchi di scuola), ma sarà determinata dalle sorgenti del campo. Insomma essa è dinamica, e si ricordi a questo proposito che il modello Euclideo dello spazio
invariabile ha descritto le nostre esperienze geometriche con successo per oltre venti secoli!
Il fondamento fisico di questa teoria è la proprietà fondamentale dei campi gravitazionali
che va sotto il nome di principio di equivalenza forte il quale, quando venga formulato
nella maniera appropriata scoperta da Einstein, si rivela per quello che veramente è, ossia
un potente principio di simmetria di gauge.
7.1
Il principio di equivalenza
Ref. [1] S. Weinberg, Gravitation and Cosmology: principles and applications of the general
theory of relativity, John Wiley & sons, Inc. (1972), Cap. [3].
104
Il principio di equivalenza coincide essenzialmente con l’osservazione che in una navicella
spaziale sufficientemente piccola e in caduta libera gli effetti del campo gravitazionale
sono trascurabili. Questo segue generalizzando ai campi arbitrari la scoperta di Galileo
secondo la quale, nel debole campo di gravità terrestre, tutti i pesi cadono con la stessa
accelerazione. Dalla seconda legge del moto si conclude allora che la forza gravitazionale
è proporzionale alla massa inerziale del peso, e dalla terza legge che è anche proporzionale
alla massa inerziale della sorgente (la terra, nel caso in esame). Non occorre dunque distinguere la massa gravitazionale passiva, che determina l’intensità della forza di gravità,
dalla massa inerziale che compare nella seconda legge del moto. Se indichiamo quest’ultima con mI , e con mG la massa gravitazionale passiva tale che F = mG g⊕ , le osservazioni
di Galileo comportano l’eguaglianza universale mG = mI . Se non fosse esattamente cosı̀,
l’accelerazione impartita dal campo gravitazionale
(
a=
mP
mI
)
g⊕ ≃ 9.81 cm · sec−2
g⊕ ,
non sarebbe la stessa per tutti i pesi. Esperimenti mediante pendoli fabbricati con materiali diversi furono eseguiti da Newton, Bessel e Potter, senza rivelare differenze significative.
Il primo esperimento di precisione è di Eötvös (1889, 1922), secondo il quale per molte
coppie di sostanze (A, B) si ha il limite
(
mI
mP
(
)
−
A
mI
mP
)
≤ 10−9
(1.1)
B
Misure più recenti di Dicke, Roll, Krotkov (1964) e Braginsky (1972), hanno portato
la precisione a 10−11 e un recente esperimento a Washington (1994, 1999) addirittura a
10−13 ! (si visiti il sito http://relativity.livingreviews.org/ per un aggiornamento
scritto da C. Will1 ).
All’uguaglianza mG = mI si può dare la seguente importante interpretazione, suggerita
′
dallo stesso Einstein. Sia K un sistema accelerato rispetto al sistema inerziale K, con
′
accelerazione g: in K è allora “presente” un campo gravitazionale uniforme con acce′
′
′
lerazione g = −g. Infatti l’osservatore in K osserva una forza inerziale mI g che è la
′
stessa per tutti gli oggetti materiali, e uguale alla “forza peso” mG g . Si può estendere
allora il principio di relatività almeno ai sistemi non relativistici uniformemente accelerati,
perché il moto delle particelle libere in tali sistemi non può essere usato per determinare
l’accelerazione del riferimento: si può tranquillamente attribuire il moto accelerato delle
particelle a un campo gravitazionale. Si può anche dire che il passaggio a un sistema di
riferimento accelerato genera un campo di forze inerziali che, dal punto di vista meccanico,
è del tutto indistinguibile da un campo gravitazionale2 . Più in generale,
1
Il più recente aggiornamento è in http://babbage.sissa.it al riferimento gr-qc/0510072
Quali siano le sorgenti di questo campo è un problema che ha grande importanza concettuale, ma
nel quale preferiamo non addentrarci.
2
105
A. la transizione da un sistema di coordinate a un altro, arbitrariamente accelerato rispetto al primo, non può essere fisicamente distinta da un cambiamento del campo gravitazionale. Non si dovrebbe quindi assumere l’esistenza
di sistemi di coordinate privilegiati.
Abbiamo appena visto che un campo uniforme può essere generato passando a un opportuno sistema di riferimento, ma ovviamente questo campo può essere nuovamente eliminato
semplicemente ritornando alle coordinate inerziali iniziali. Questa è anzi la proprietà
di tutti i campi cosı̀ generati, siano essi uniformi o no: la trasformazione di coordinate
inversa li elimina globalmente. È questa una proprietà del campo gravitazionale del nostro sole (per esempio) o della Terra? Certamente no. La scoperta di Galileo che tutti
i pesi cadono con la stessa accelerazione implica immediatamente che in un sistema di
riferimento sufficientemente piccolo e in caduta libera senza rotazione rispetto alla massa
media dell’universo, il campo gravitazionale non può essere rivelato perché l’osservatore, i
corpi di prova, gli strumenti e il sistema stesso accelerano tutti allo stesso modo. Essendo
il campo gravitazionale non omogeneo, questa cancellazione della gravitazione per mezzo
delle forze inerziali elimina il campo solo in una piccola regione spaziale e se non si aspetta
troppo a lungo: per esempio, visto che le linee di forza del campo terrestre convergono
verso il centro della terra, due palline in caduta libera avranno una piccola accelerazione
relativa trasversale alla direzione radiale di caduta libera.
Ma vale tutto ciò anche per gli altri fenomeni naturali? Per esempio, un’onda elettromagnetica che rimbalza fra due specchi in caduta libera si comporterà come in assenza
di gravitazione? Un atomo in caduta libera avrà le stesse frequenze di transizione di un
atomo in assenza di gravità? Cioè, in uno stato di caduta libera si potrà parlare veramente di “assenza di gravitazione”, o questo si potrà dire solo per le equazioni del moto?
Einstein riteneva che si potesse affermare la cancellazione degli effetti gravitazionali nei
sistemi locali in caduta libera da tutte le leggi della fisica, non solo dalle leggi del moto.
Per lo spazio-tempo di un campo gravitazionale arbitrario, dunque, si assume valido il il
principio di equivalenza forte 3 , secondo il quale:
B. In un intorno sufficientemente piccolo di ogni evento p, esiste un sistema di
coordinate X a , che chiameremo localmente inerziale in p, rispetto al quale le
leggi fisiche assumono la forma che hanno nella teoria della relatività ristretta
in assenza di gravitazione.
In particolare, in ogni punto è definito un intervallo spazio-temporale che nelle coordinate
X a assume con grande approssimazione (poiché in generale il campo non è uniforme nè
costante) la forma canonica della relatività ristretta
ds2 = ηab dX a dX b
(1.2)
dove ηab è la metrica di Minkowski. Le coordinate X a sono determinate a meno di trasformazioni di Lorentz, X a → Λab X b , perché queste formano il gruppo di simmetria della
3
Una formulazione maggiormente precisa sarà data più avanti.
106
metrica di Minkowski. Una teoria che si fonda su tale principio è dunque localmente
invariante di Lorentz. Si noti che l’uguaglianza delle masse inerziale e gravitazionale implica il principio di equivalenza solamente per le equazioni del moto, mentre in [B] se ne
afferma la validità per tutte le leggi naturali. Per questa ragione si distingue un principio
di equivalenza forte da un principio di equivalenza debole, quest’ultimo valido solo per le
leggi del moto. È facile capire che una teoria basata su questo principio deve abbandonare
la relatività ristretta: due osservatori distanti in caduta libera accelerano l’uno rispetto
all’altro, ciò nonostante osservano le stesse leggi.
7.2
Metrica e gravitazione
L’asserzione [B] contiene due idee notevoli:
• si afferma che lo spazio-tempo è localmente Euclideo, nel senso che ogni punto è in
un intorno che è in corrispondenza biunivoca e continua (in una parola, omeomorfo)
con un aperto di R4 (cioè ad ogni punto corrispondono quattro coordinate, e la
corrispondenza è continua e invertibile).
• Poi si dice che esiste una metrica Lorentziana4 , e che le coordinate in un intorno di
p si possono scegliere localmente inerziali: il prodotto scalare fra due vettori5 con
origine in p è (u, v) = ηab ua v b (ma solo in p), dove ua (v b ) sono le componenti di u
(v) rispetto alle coordinate localmente inerziali.
Il primo punto è uno degli assiomi che definiscono le varietà differenziabili, il secondo
punto è nella definizione di varietà Riemanniana, se la metrica è definita positiva, o semiRiemanniana nel caso contrario, e l’esistenza delle coordinate localmente inerziali è un
teorema di questa geometria (tranne che in un contesto matematico si chiamano coordinate
normali di Riemann). Vediamo dunque che il linguaggio matematico atto a incorporare
automaticamente il principio di equivalenza, è quello delle varietà differenziabili sulle quali
è definita una metrica di Lorentz, cioè un campo di tensori simmetrici di rango due con tre
autovalori positivi e un solo autovalore negativo (v. appendice [A]). Siccome la definizione
di varietà è leggermente elaborata, e dato che tale rigore non è strettamente richiesto in
una trattazione elementare della relatività generale, abbiamo posto la definizione di varietà
differenziabile in appendice [A]. Ora vogliamo discutere più in dettaglio come le varietà
metriche realizzano le idee di Einstein sul campo gravitazionale in modo naturale.
Consideriamo la relatività ristretta dal punto di vista di un sistema di coordinate locali
arbitrario, di cui sono funzione le coordinate cartesiane inerziali, X a = X a (xb ). Queste
funzioni sono in generali definite in intorno aperto dello spazio-tempo e sono differenziabili e invertibili con inverse differenziabili. Le matrici Jacobiane ∂X a /∂xb sono allora
invertibili, hanno per inverse le matrici ∂xa /∂X b , e determinano l’elemento di linea nella
forma
4
Chiamasi Lorentziana una metrica con tre (o n − 1 in dimensione n) autovalori positivi e un solo
autovalore negativo.
5
Il concetto di vettore tangente è definito in appendice.
107
ds2 = gab (x)dxa dxb
(2.1)
dove
gab (x) = ηcd
∂X c ∂X d
∂xa ∂xb
(2.2)
Ricordiamo qui che vale la convenzione di Einstein, secondo la quale si somma sugli indici
ripetuti. Si noti che det g < 0. La metrica inversa è
∂xa ∂xb
g (x) = η
∂X c ∂X d
ab
cd
(2.3)
′
Più in generale, passando alle coordinate x a si ha la formula di trasformazione
′
′
gab (x ) =
∂xc ∂xd
gcd (x)
∂x′ a ∂x′ b
(2.4)
come segue facilmente dalla (2.1). Non solo la metrica, ma anche i tensori si trasformano
in modo analogo. Ad esempio, per il vettore tangente a una curva si ha6
′
′
dx a
∂x a dxb
=
dτ
∂xb dτ
Per i vettori si hanno quindi le formule di trasformazione
′
ua =
′
∂x a a
u ,
∂xb
′
ua =
∂xb
ua
∂x′ a
(2.5)
dove ua = gab ub . Insomma, tutto procede come in relatività ristretta, eccetto che le
′
′
matrici ∂x a /∂xb e le loro inverse ∂xa /∂x b prendono il posto delle matrici di Lorentz Λab .
6
Si usi la formula di derivazione delle funzioni composte.
108
7.2.1
Moto di una particella
Come è noto dalla relatività ristretta, le equazioni del moto di una massa puntiforme
libera seguono dal principio variazionale
∫
δ
dτ = 0,
(
)1/2
dτ = −gab dxa dxb
in cui la massa è assente; si ha intanto
∫
δ
)
∫ (
1
a
b
a
c
b
gab ẋ dδx + ∂c gab ẋ δx dx
dτ = −
2
)
∫ (
1
d
a
b c
=
(gab ẋ ) − ∂a gbc ẋ ẋ δxa dτ = 0
dτ
2
(2.6)
dove
ẋa =
dxa
dτ
è il quadrivettore velocità, tangente alla curva e normalizzato: gab ẋa ẋb = −1. Dalla (2.6)
otteniamo le equazioni del moto
d
1
(gab ẋa ) − ∂a gbc ẋb ẋc = 0
dτ
2
Calcolando la derivata
1
gab ẍb + ∂c gab ẋc ẋb − ∂a gbc ẋb ẋc = 0
2
oppure, simmetrizzando il secondo termine e moltiplicando l’equazione per la metrica
inversa,
ẍa + Γabc (x)ẋb ẋc = 0
(2.7)
Qui abbiamo introdotto i coefficienti di connessione affine, o simboli di Christoffel del
secondo tipo,
1
Γabc (x) = g ad (∂b gdc + ∂c gbd − ∂d gbc )
(2.8)
2
Le eq. (2.7) esprimono semplicemente l’asserzione che rispetto alle coordinate inerziali il
moto libero è dato dalle equazioni Ẍ a = 0, le cui soluzioni, le rette, sono le geodetiche
dello spazio di Minkowski.
Secondo l’asserzione [A], il passaggio alle coordinate xa ha introdotto un campo gravitazionale, e infatti le (2.7) descrivono un movimento accelerato in cui le forze sono
determinate dai coefficienti Γabc . Le componenti della metrica gab (x) sono allora l’analogo dei potenziali. L’argomento che ha condotto alle (2.7) è valido anche in un campo
gravitazionale, solamente che in questo caso sono locali le coordinate inerziali stesse7 .
7
Cosicché non si potrà eliminare il campo con un’unica trasformazione di coordinate.
109
C. Perciò interpretiamo le (2.7) come le equazioni del moto di una particella
in un campo gravitazionale, e le componenti della metrica, le dieci funzioni
′
gab (x), come il campo gravitazionale stesso. Nel sistema x , esso sarà descritto
′
′
dalle funzioni gab (x ) date dall’equazione (2.4).
È importante ricordarsi che possiamo eliminare totalmente questo campo semplicemente
ritornando alle coordinate inerziali X a . Proprio perché rappresentano le “forze” gravitazionali, i coefficienti di connessione non possono trasformarsi come tensori. Passando alle
′
coordinate x a si ha8
′
′
′
Γ abc (x ) =
′
∂x a ∂xβ ∂xγ α
∂x a ∂ 2 xα
Γ
(x)
+
∂xα ∂x′ b ∂x′ c βγ
∂xα ∂x′ b ∂x′ c
(2.9)
′
Solo in questo modo, infatti, le equazioni del moto nelle coordinate x assumono la stessa
forma delle (2.7).
coordinate localmente inerziali
Usando la connessione è facile costruire in un intorno di ogni punto un sistema di coordinate locali in caduta libera. A tale scopo, sia p un evento e indichiamo con eaα la matrice
invertibile che diagonalizza la metrica in p,
eaα ebβ gab (xp ) = ηλβ ,
eaα ebβ η αβ (xp ) = gab
La trasformazione x → X data da
1
xa = xap + ebα X α − Γabc (xp )ebα ecβ X α X β + F a (X)
2
(2.10)
dove F è una funzione liscia che si annulla in p insieme con le derivate prime e seconde,
è localmente invertibile in un intorno aperto di p, perché
( a)
∂x
= eaα
∂X α |p
e dunque definisce una trasformazione di coordinate; se indichiamo con ḡαβ e Γ̄αβγ la
metrica e la connessione nelle nuove coordinate, in p (cioè per X α = 0) si ha
Γ̄αβγ = 0
ḡαβ = ηαβ ,
ossia
(
∂ḡλβ
∂X γ
)
=0
|p
8
Usando la (2.8) il conto è un pó tedioso, ma elementare. Un metodo più diretto è riscrivere le (2.7)
nelle nuove coordinate.
110
Le coordinate X α sono dunque inerziali in p, e nell’intorno dove la (2.10) è invertibile la
metrica è costante a meno di termini che contengono solo derivate seconde o di ordine
superiore della metrica. Come vedremo, queste sono connesse alla curvatura dello spaziotempo attraverso il tensore di Riemann. Una geodetica uscente da p con vettore tangente
uα e parametro affine s, nelle coordinate X α ha un’espansione del tipo
α
X α = uα s + Cβγδ
uβ uγ uδ s3 + · · ·
α
con coefficienti Cβγδ
calcolabili; in matematica le X α si chiamano coordinate localmente
geodetiche in p. I geometri mostrano che in un intorno di p (che si può prendere convesso),
è possibile scegliere le funzioni F α (X) tali che le geodetiche uscenti da p siano descritte
da funzioni lineari del parametro affine in tutto l’intorno; tali coordinate si chiamano
coordinate normali di Riemann.
metrica e gravitazione
Nel seguito useremo i termini “campo metrico” e “campo gravitazionale” come sinonimi,
e si noti che non si tratta solo di una questione terminologica. Studiare un campo gravitazionale o la geometria della metrica Lorentziana che lo rappresenta, sono veramente la
stessa cosa. Si può anche fare la seguente analogia: esplorando lo spazio con cariche elettriche ed aghi magnetici si determina il campo elettromagnetico, esplorandolo con regoli
graduati ed orologi si determina il campo metrico, che è anche il campo gravitazionale.
Ad esempio, provate a studiare la metrica
ds2 = −(1 + gx/c2 )2 c2 dt2 + dx2 + dy 2 + dz 2
dove g è una costante (se fosse g = 0 si avrebbe la metrica di Minkowski, ossia l’assenza
di campo). Ecco alcune questioni rilevanti:
1. qual’è il dominio di definizione delle coordinate? Quale di esse rappresenta il tempo?
e perché?
2. come si calcola la metrica inversa? e la connessione Γabc (x, y, z)?
3. quali sono le geodetiche nulle e temporali?
4. che proprietà hanno le curve coordinate x = x0 > 0, y = z = 0? sono geodetiche?
possiedono accelerazione?
5. quanto vale l’intervallo di tempo proprio fra due eventi delle curve?
6. esiste una trasformazione di coordinate che converte il campo nella metrica di
Minkowski: siete capaci di trovarla?
7. è la superficie x = −c2 /g una singolarità del campo? dello spazio-tempo? delle
coordinate?
111
8. quanto “tempo” impiega una particella a raggiungere la detta superficie da un punto
qualunque lungo una geodetica? e un raggio di luce?
9. un raggio di luce viaggia dal punto x = x0 , y = z = 0 al punto x = x1 , y = z = 0:
quanto tempo coordinato impiega?
10. una sorgente nell’origine, x = y = z = 0, emette un raggio di luce di frequenza
propria ν che viene rivelato nel punto x = x1 , y = z = 0: quanto vale la frequenza
propria osservata?
11. una particella è ferma rispetto alle coordinate (t, x, y, z); come si muove rispetto a
un osservatore inerziale? quanto vale l’accelerazione?
Si noti il “sapore” marcatamente geometrico delle domande, nonostante tutte corrispondano, più o meno direttamente, a problemi di fisica gravitazionale.
7.2.2
Distanze spaziali e intervalli di tempo
È interessante discutere certe restrizioni imposte al sistema di coordinate locali dal carattere Lorentziano della metrica. Fino ad ora non abbiamo specificato quale delle quattro
coordinate debba rappresentare il tempo, perché infatti è la metrica che determina le
relazioni causali, non le coordinate. Tuttavia è comodo fare la convenzione che x0 sia una
coordinata temporale, nel senso che le linee corrispondenti a valori fissi delle rimanenti
coordinate, xj = (x1 , x2 , x3 ), rappresentano curve temporali9 . I vettori tangenti a queste
curve sono di tipo tempo e normalizzati
gab ua ub = −1
e hanno componenti
ua = δ0a (−g00 )−1/2
Infatti, dal carattere temporale delle curve xj = xj0 , segue che g00 < 0. Sulla superficie
determinata localmente dalla condizione x0 costante, tutte le curve sono spaziali (perché
la metrica ha tre autovalori positivi) e quindi la metrica indotta, di componenti gij ,
deve essere una matrice definita positiva. Tuttavia questa non determina le distanze
spaziali perché gli eventi con lo stesso valore di x0 non sono, in generale, simultanei
per gli osservatori che seguono le linee temporali (cioè che hanno quadrivelocità ua ). In
relatività ristretta, la condizione che due eventi con separazione ∆X a siano simultanei per
un osservatore con quadrivelocità ua , è ua ∆X a = 0. Poiché differenze finite di coordinate
9
Il fatto che la metrica abbia un autovalore negativo implica che almeno una delle quattro linee
coordinate (una linea coordinata è una curva lungo la quale una sola coordinata varia) sia una curva
temporale (in inglese, timelike).
112
curvilinee non definiscono un quadrivettore, mentre differenze infinitesime10 sı̀, scriveremo
la condizione di simultaneità per eventi vicini
ua δxa = (−g00 )−1/2 ga0 δxa = 0
(2.11)
Da questa segue la differenza di tempo coordinato tra eventi simultanei
√
√
−g00 δx0 = γj δxj ,
γj = g0j / −g00
La distanza è il valore dell’intervallo ds2 tra eventi simultanei: sostituendo δx0 nella
metrica si ottiene la distanza spaziale
)
(
g0i g0j
2
i
j
δxi δxj
(2.12)
ds = (gij − γi γj )δx δx = gij +
g00
Questa metrica non è in generale Euclidea. Ad esempio, si consideri la trasformazione di
coordinate (T, R, θ, Z) → (t, r, ϑ, z), dove
ϑ = θ − ωT,
r = R,
z = Z,
t=T
e (T, R, θ, Z) sono coordinate cilindriche nello spazio di Minkowski. Un punto di coordinate (r, ϑ, z) si muove rispetto al riferimento inerziale di moto circolare uniforme, con
velocità angolare ω. La semplicità della trasformazione t = T è ingannevole; a causa della
dilatazione relativistica del tempo, gli orologi che segnano il tempo t devono marciare
tanto più rapidamente quanto più sono lontani dall’asse di rotazione. La variabile t è un
esempio di tempo coordinato. La metrica di Minkowski, ds2 = −c2 dT 2 +dR2 +R2 dθ2 +dZ 2 ,
si trasforma nella metrica di Langevin
ds2 = −(c2 − ω 2 r2 )dt2 + 2ωr2 dt dϑ + dr2 + r2 dϑ2 + dz 2
Questo è il campo gravitazionale che si manifesta rispetto al disco rotante situato nel
piano z = 0. Calcolando la metrica spaziale con la (2.12) si trova
r2 dϑ2
ds = dr +
+ dz 2
2
2
2
1 − ω r /c
2
2
Da qui vediamo che la circonferenza del cerchio di raggio r, misurata con regoli in quiete
sul disco, è
2πr
L= √
> 2πr
1 − ω 2 r2 /c2
un risultato che viola la geometria Euclidea! Dal punto di vista dell’osservatore inerziale
che vede il disco girare, il fenomeno si spiega osservando che i regoli disposti lungo la
circonferenza appaiono contratti rispetto a quelli disposti lungo un diametro, perché i
primi sono disposti nel senso della velocità, che vale ωr, mentre i secondi sono trasversali
al moto. L’osservatore sul disco la pensa diversamente però, dato che vede i regoli in
quiete. Tuttavia nota che esiste un campo gravitazionale, e potrà concludere che l’effetto
sia dovuto al comportamento dei regoli nel campo di gravità. Seguendo Einstein, possiamo
concludere:
10
′
δx a =
′
∂x a
δxb
∂xb
è la formula di trasformazione di un vettore.
113
D. la geometria fisica, o naturale, che si ottiene esplorando lo spazio-tempo
mediante misure con regoli graduati ed orologi11 , non è a priori conforme agli
enunciati della geometria Euclidea, nè di qualunque altro sistema assiomatico.
Non è quindi corretto assumere a priori la validità di un sistema geometrico assiomatico indipendentemente dalle proprietà della materia (inclusa la
radiazione).
Per quanto riguarda il tempo, osserviamo soltanto che l’intervallo di tempo proprio tra
eventi con identiche coordinate spaziali è, ovviamente,
√
dτ = −g00 (x) dx0
(2.13)
e dipende dal punto. Per esempio, sulla piattaforma rotante si ha
√
dτ = 1 − ω 2 r2 /c2 dt
la quale significa che un orologio standard (cosı̀ chiamato per distinguerlo dall’orologio
fittizio che indica il tempo coordinato) posto in r ritarda rispetto a un orologio identico
posto nel centro. Come prima, secondo l’osservatore inerziale il fenomeno è dovuto alla
dilatazione relativistica del tempo, visto che l’orologio posto in r viaggia con velocità ωr
rispetto al sistema inerziale. L’osservatore rotante, però, vede l’orologio in quiete e quindi
interpreta il ritardo come un effetto dovuto al campo gravitazionale della piattaforma12 . Si
può dunque avere un ritardo degli orologi anche indipendentemente dal loro moto relativo,
un effetto dovuto al campo metrico/gravitazionale che va sotto il nome di “spostamento
verso il rosso” (o effetto Einstein o anche red shift).
11
Naturalmente si usano anche particelle di prova e segnali elettromagnetici.
Si deve assumere che gli effetti di stress sui materiali dei regoli e degli orologi siano stati
preventivamente determinati e opportunamente corretti.
12
114
Capitolo 8
Appendici
A
Invarianza della fase
Denotiamo con C la cresta d’onda che è nell’origine al tempo t = 0. La fase in F è
(
)
(
x cos α + y sin α
r)
F(t, x, y) = ν t −
=ν t−
c
c
e si può interpretare come il numero di oscillazioni del campo che si osservano in X = (x, y)
durante l’intervallo di tempo che intercorre tra l’arrivo in X di C e l’istante t (intervallo
che ammonta a t − r/c secondi).
′
Sia F un sistema di riferimento in moto relativo uniforme rispetto al sistema assoluto F ,
′
con velocità v nella direzione dell’asse x, e coincidente con F nell’istante t = t = 0. Sia
′
′
′
′
′
X = (x , y ) il punto di F che coincide con X = (x, y) al tempo t = t: evidentemente il
′
numero di oscillazioni del campo in X , contate a partire dal passaggio di C fino al tempo
′
′
t = t, coincide con quello determinato in F e determina la fase dell’onda in F
(
′
′
′
′)
x cos α + y sin α
′
′
′
′
′
′
F (t , x , y ) = ν t −
c′
′
′
′
′
′
′
′
Dunque si ha F(t, x, y) = F (t , x , y ). Inoltre (x , y ) coincide con (x, y) al tempo t = t,
e quindi si ha la trasformazione di Galilei
′
x = x − vt
′
′
y =y
t =t
′
′
′
′
L’affermazione F(t, x, y) = F (t , x , y ) per ogni trasformazione di Galilei è precisamente
ciò che si intende quando si dice che F(t, x, y) è un invariante del gruppo di Galilei.
B
La delta di Dirac
Sia hn (x, x0 ) una successione di funzioni tali che
∫
hn (x, x0 )dx = 1
115
∫
lim
n→0
hn (x, x0 )f (x)dx = f (x0 )
(B.1)
dove gli integrali sono estesi alla retta reale. Esempio:
√
1 −(x−x0 )2 /n
hn (x, x0 ) =
e
πn
Si noti che limn→0 hn (x, x0 ) = 0 se x ̸= x0 , ma è infinito se x = x0 , e dunque non
definisce una funzione. Tuttavia il limite (B.1) esiste e definisce un funzionale lineare sullo
spazio delle funzioni f , chiamate in questo contesto funzioni di prova. Questi funzionali
si chiamano distribuzioni, o anche funzioni generalizzate. In accordo con l’uso che ne fanno
i fisici, noi scriveremo δ(x − x0 ) per indicare il funzionale definito dalla (B.1)
δ(x − x0 ) = lim hn (x, x0 )
(B.2)
n→0
e scriveremo anche
∫
δ(x − x0 )f (x)dx = f (x0 )
(B.3)
Però bisogna ricordarsi che δ(x − x0 ) non è una funzione e che il significato preciso della
(B.3) si trova nell’Eq. (B.1). La funzione generalizzata δ(x − x0 ) si chiama delta di Dirac.
Conviene prendere le funzioni f di classe C ∞ e con supporto compatto (cioè nulle nel
complementare di un insieme chiuso e limitato). Si può allora definire la derivata di
δ(x − x0 ) integrando per parti
∫
′
′
δ (x − x0 )f (x)dx = −f (x0 )
(B.4)
′
La definizione si può applicare a qualsiasi funzione generalizzata T (x): la derivata T (x)
è la funzione generalizzata tale che
∫
∫
′
′
T (x)f (x)dx = − T (x)f (x)dx
(B.5)
per ogni funzione di prova f (x). Esempio: sia θ(x) la funzione scalino di Heaviside,
θ(x) = 1 se x > 0 e θ(x) = 0 se x < 0. Si ha
∫
∫ ∞
θ(x)f (x)dx =
f (x)dx
0
e dunque per il teorema fondamentale del calcolo
∫
′
θ (x)f (x)dx = f (0)
′
Questo significa che θ (x) = δ(x), un fatto piuttosto intuitivo. Se x = (x1 , . . . , xn ) ∈ Rn
definiamo
δ (n) (x) = δ(x1 ) · · · δ(xn )
(B.6)
Nello spazio di Minkowski avremo δ (4) (x) = δ(x0 )δ(x1 )δ(x2 )δ(x3 ). Per i nostri scopi, le
principali proprietà della delta di Dirac sono
116
1. δ(x) = δ(−x)
2. δ(ax) = |a|−1 δ(x)
3. f (x) abbia N zeri semplici xn : allora
δ(f (x)) =
∑
1
δ(x − xn )
|f (xn )|
′
n
4. sia A una matrice non singolare: allora
δ (n) (Ax) = | det A|−1 δ (n) (x)
5. se Λ è nel gruppo di Lorentz proprio ortocrono
δ (4) (Λx) = δ (4) (x)
cioè δ (4) (x) è uno scalare, invariante per trasformazioni di Lorentz.
Le proprietà sono tutte conseguenze della formula di trasformazione delle variabili di
integrazione. Ad esempio
∫
∫
(n)
n
−1
δ (Ax)f (x)d x = | det A|
δ (n) (x)f (A−1 x)dn x = | det A|−1 f (0)
da cui segue la quarta proprietà. Un caso particolare della terza proprietà è la formula
δ(x2 − x20 ) =
1
(δ(x − x0 ) + δ(x + x0 ))
2|x0 |
(B.7)
Una importante rappresentazione integrale discende dalla trasformata di Fourier
∫
˜
f (k) = eikx f (x)dx
La formula di inversione
∫
1
f (x) =
f˜(k)e−ikx dk
2π
implica (lo scambio degli integrali non sarebbe ammesso, ma si può giustificare)
∫
∫
∫
∫
∫
−ikx
ikx
dx f (x) dk e
= dk e f (x)dx = dk f˜(k) = 2π f (0)
L’ultimo passaggio segue dalla formula di inversione. Dunque si ha
∫
∫
1
1
−ikx
δ(x) =
dk e
=
dk eikx
2π
2π
(B.8)
L’ultimo passaggio è evidente, oppure segue dalla parità della delta, secondo cui δ(x) =
δ(−x).
117
C
Testi di Riferimento
Abbreviazioni: RS e RG stanno per relatività speciale e generale, rispettivamente. I testi
di base sono tutti altamente raccomandabili, ma ovviamente ciascuno può studiare dove
gli pare e piace.
Le abbreviazioni dei testi sotto indicati, Wei, Sch, LL, Rin, Law, Wil, PP, Mø, Pau
e Ber, sperabilmente, si commentano da sole.
testi di base
* B. Schutz[3], A First Course in General Relativity. I Cap. [1,2,3,5,6,7,8] coprono
materiale simile al corso, con metodi elementari ma approfonditi (difficili sono i
concetti).
* S. Weinberg[4], Gravitation and Cosmology: Principles and Applications of the General Theory of Relativity. Il Cap. [2] offre una sintesi della RS. I Cap. [3,4,5,6,7]
offrono le basi della RG. Il libro è considerato un classico, ed è eccellente sotto tutti
gli aspetti.
* W. Rindler[5], Introduction to Special Relativity. Trattato elementare ma brillante.
* L. Landau e E. Lifsitz[6], The Classical Theory of Fields. Libro eccellente. I
Cap. [1,2,3,4] discutono la RS e l’elettrodinamica, non richiede conoscenze matematiche sofisticate.
testi complementari
* D. F. Lawden[7], Introduction to Tensor Calculus, Relativity and Cosmology.
* C. Will[8], Theory and Experiments in Gravitational Physics.
* W. Panofski & M. Phillips[9], Classical Electricity and Magnetism, Cap. [15,16,17,18].
Il testo di Will si occupa di relatività generale. Il PP include un capitolo sulle basi
sperimentali della relatività che vale la pena di leggere.
testi datati
Fra i testi datati, i più istruttivi mi sembrano i seguenti:
* C. Møller, The Theory of Relativity, Oxford, 1972.
* W. Pauli, Theory of Relativity, Dover New Ed., 1986.
* P. G. Bergmann, Introduction to the Theory of Relativity, Dover, 1976.
* M. Born, Einstein’s Theory of relativity, Dover New Ed., 1962.
118
Tutti offrono punti di vista alternativi e approfondimenti su varie questioni di principio
e dunque possono anche essere considerati come testi complementari. Il libro di Møller
ha una interessante introduzione al quadro storico entro cui si è sviluppata la teoria della
relatività. I due seguenti offrono esposizioni molto brillanti della teoria, ma Pauli è forse
troppo conciso per uno studente alle prime armi. Il libro di Max Born è indirizzato ai
non esperti, ma offre discussioni interessanti e approfondite dei concetti fondamentali.
D
Argomeni da studiare per l’esame
In linea di principio tutti gli argomenti discussi nel corso dovrebbero essere studiati. Ma
in pratica, allo scopo di facilitare la preparazione dell’esame, si richiederà molto meno,
come di seguito specificato.
1. Fisica pre-relativistica: il primo capitolo del libro di Møller offre una panoramica
dei problemi che hanno condotto alla relatività. Gli studenti dovrebbero avere
un’idea delle difficoltà poste alla teoria dell’etere dall’esperimento di Michelson e
Morley.
2. Relatività speciale: Schutz, Rindler e/o Landau-Lifschitz vanno tutti bene. Gli
studenti devono sapere la definizione del tempo secondo Einstein, i postulati della
relatività, la derivazione delle trasformazioni di Lorentz, la dilatazione del tempo e la
contrazione delle lunghezze, l’addizione delle velocità, l’effetto Doppler e la formula
dell’aberrazione. Ma anche la definizione del tempo proprio, del moto iperbolico,
dello spazio-tempo, la metrica di Minkowski e tutto l’apparato quadri-dimensionale,
il cono luce, i quadri-vettori, ecc. Integrate i vostri appunti sui libri consigliati.
3. Tensori: i tensori si possono studiare sul Schutz, gli studenti devono sapere cosa
sono i tensori e come si trasformano.
4. Dinamica Relativistica: le equazioni di Eulero-Lagrange per i sistemi continui
(campi) sono in LL, Cap.[4], ¶[32], il principio variazionale per le particelle in LL
Cap. [2-3]. Gli studenti devono sapere le equazioni di Eulero-Lagrange, le equazioni
del moto relativistiche per le particelle, le formule per la quantità di moto e l’energia, le loro formule di trasformazione e il teorema di equivalenza massa-energia.
La formulazione covariante delle equazioni di Maxwell, il campo elettromagnetico in relatività, le formule di trasformazione, la corrente elettrica, l’equazione di
continuità, la forza di Lorentz e l’equazione del moto per le cariche, la loro derivazione da un principio variazionale, il tutto anche in forma covariante. Le equazioni
fenomenologiche di Minkowski sono facoltative.
5. Tensore energia-impulso: su LL, Cap. [4], c’è tutto per l’elettrodinamica. Lo
studente deve sapere la definizione del tensore energia-impulso canonico, il significato fisico delle sue componenti, la legge di conservazione, il tensore per i fluidi perfetti
e le particelle e come trattare il caso elettromagnetico. Anche Wei, Cap. [2], offre
agganci con l’argomento.
119
6. Relatività Generale: Wei, i Cap. [3,4,5,6,7] coprono tutto quel che si è detto a
lezione (e molto di più), tranne la teoria di Nordstrøm, che non è richiesta per l’esame. Lo stesso dicasi di Sch. Quindi studiate. Le cose minime da sapere includono
il principio di equivalenza, l’uguaglianza della massa inerziale e gravitazionale, la
metrica dello spazio-tempo, le forze gravitazionali, cosa sono le geodetiche e il loro
significato fisico, il red-shift e la sua verifica sperimentale, il principio di covarianza
generale, qualche esempio di equazione covariante rispetto al gruppo generale di
trasformazioni, il limite newtoniano delle equazioni geodetiche, un’idea del tensore
di Riemann e delle equazioni di Einstein quale si può ottenere sul Sch. Se non
sapete o non capirete granché, ma ve la cavate bene con la RS, sarò soddisfatto.
Però provateci.
120
Bibliografia
[1] Neil Ashby, Relativity in the Global Positioning System, Living Rev. Relativity 6,
(2003), 1. URL (cited on ¡date¿): http://www.livingreviews.org/lrr-2003-1
[2] A. Einstein, The Principle of Relativity, Dover Publications (2000).
[3] B. Schutz, A First Course in General Relativity, Cambridge University Press, 1985.
[4] S. Weinberg, Gravitation and Cosmology: Principles and Applications of the General
Theory of Relativity, Wiley & Sons, 1972.
[5] W. Rindler, Introduction to Special Relativity, Oxford 1981.
[6] L. Landau e E. Lifsitz, The Classical Theory of Fields, IV Ed. 1987, oppure Teoria
dei campi, Editori Riuniti, 1976.
[7] D. F. Lawden, Introduction to Tensor Calculus, Relativity and Cosmology, Dover
Ed. s 1982.
[8] C. Will, Theory and Experiments in Gravitational Physics, Cambridge Revised
Ed. 1993.
[9] W. Panofski & M. Phillips, Classical Electricity and Magnetism, Dover 2nd Edition,
1962.
[10] H. P. Robertson, Rev. Mod. Phys. 21, 379 (1949).
[11] R. M. Mansouri and R. U. Sexl, Gen. Rel. Grav. 8, 497 (1977); Gen. Rel. Grav. 8,
515 (1977); Gen. Rel. Grav. 8, 809 (1977).
121