CENNI SULLE VARIABILI ALEATORIE ............................................................................................................................. 2
1 INTRODUZIONE ALLA TEORIA DELLE PROBABILITÀ ................................................................................................................... 2
2 APPROFONDIMENTO SULLA TEORIA DELLE PROBABILITÀ ......................................................................................................... 3
2.1 Teorema della probabilità dell’evento complementare ................................................................................................... 3
2.2 Teorema della probabilità totale ..................................................................................................................................... 3
2.3 Fenomeno aleatorio condizionato ................................................................................................................................... 3
2.4 Indipendenza Statistica.................................................................................................................................................... 4
2.5 Teorema di Bayes ............................................................................................................................................................ 4
3 DEFINIZIONE DI VARIABILE ALEATORIA .................................................................................................................................... 5
3.1 Funzione distribuzione..................................................................................................................................................... 5
3.2 Funzione densità di probabilità....................................................................................................................................... 6
4 APPROFONDIMENTI CON ESEMPI SULLE VARIABILI ALEATORIE ................................................................................................. 7
4.1 Variabili aleatorie discrete.............................................................................................................................................. 7
4.2 Variabili aleatorie continue.......................................................................................................................................... 10
1
Cenni sulle variabili aleatorie
1 Introduzione alla teoria delle probabilità
la teoria della probabilità si occupa dei valori medi di fenomeni di massa che avvengono simultaneamente
o successivamente nel tempo: emissioni di elettroni, chiamate telefoniche, rilevamenti radar, controllo
della qualità di un prodotto, guasti in un impianto, meccanica statistica, indici di natalità e di mortalità,
ereditarietà.
Alcuni esempi di fenomeni aleatori di interesse specifico nelle telecomunicazioni sono:
• Errori introdotti dal canale di comunicazione sul messaggio trasmesso,
• Numero e tipo di chiamate simultaneamente attive alla centrale di commutazione,
• Errori di misura negli strumenti di acquisizione.
E’ stato osservato che in questi e altri campi certi valori medi si approssimano a un valore costante,
allorché il numero delle osservazioni aumenta. Per di più, questo valore limite si mantiene invariato,
anche se le medie vengono valutate su una qualunque successione parziale, definita prima che
l’esperimento venga compiuto. Così, se ripetendo più volte il lancio di una moneta, la percentuale degli
esiti “testa” si avvicina al 50% (valore medio), questo stesso valore si otterrebbe se si considerasse, ad
esempio, un lancio ogni quattro.
Un fenomeno aleatorio può essere caratterizzato secondo gli elementi descritti in tabella
Esperimento
Prova
Determinazione
Evento
Descrizione delle modalità di attuazione di un fenomeno
aleatorio
Esecuzione di un esperimento
Valore che può essere assunto da una grandezza fisica a
seguito di una prova
L’evento si verifica se il risultato soddisfa certi requisiti.
La teoria si propone di descrivere e di predire tali valori medi e a questo proposito si associa a un certo
evento la sua probabilità.
Nell’osservazione dei fenomeni aleatori, all’aumentare del numero delle osservazioni alcune grandezze
tendono a valori costanti. Questo consente di definire la probabilità di un evento A tramite il rapporto fra
il numero nA di occorrenze dell’evento e il numero totale n degli esperimenti effettuati:
nA
n→∞ n
Pr ( A) = lim
Pr(A) è un numero reale positivo sempre compreso tra 0 e 1.
Gli eventi aleatori si definiscono in termini di insiemi e sono caratterizzati delle probabilità ad essi
associati. Ad ognuno dei risultati si associa con una corrispondenza biunivoca un punto nell’insieme
(spazio) dei risultati Ω. Dato un evento E ad esso corrisponde l’insieme E dei punti di Ω corrispondenti ai
risultati favorevoli all’evento E. All’evento certo, cui sono favorevoli tutti i risultati possibili, corrisponde
l’intero insieme Ω e quindi la probabilità 1. Agli eventi si applicano le classiche operazioni tra insiemi, di
cui alcuni esempi sono in tabella.
2
Operazione d’insieme
Complementazione
A = {ω ω ∈ Ω,ω ∉A}
Unione
A ∪ B = {ω ω ∈ Ω,
Operazione sugli eventi
Evento “non-A”, che si verifica quando
non si verifica A
Evento “A o B”, che si verifica quando si
verifica almeno uno dei due eventi A o B.
ω ∈ A "o " ω ∈ B}
Intersezione
A ∩ B = {ω ω ∈ Ω,
Evento “A e B”, che si verifica quando si
verificano ambedue gli eventi A e B.
ω ∈ A " e" ω ∈ B}
La probabilità Pr può essere definita come una funzione che fa corrispondere ad un dato insieme in Ω un
valore reale compreso tra 0 e 1:
Pr : F→ [0 , 1]
La probabilità gode delle seguenti proprietà (assiomi):
1) Pr(E) ≥ 0, ∀ E ⊂ Ω
2) Pr(∪n En) = ΣnPr(En) ∀ E1 , …, En ⊂ Ω, Ei ∩ Ej = ∅
3) Pr(Ω) = 1
2 Approfondimento sulla teoria delle probabilità
Questa sezione contiene una rassegna dei principali risultati sulla teoria della probabilità che possono
essere utili per uno studio approfondito sui fenomeni aleatori e sulle loro applicazioni nel campo delle
telecomunicazioni.
2.1 Teorema della probabilità dell’evento complementare
Dato un evento ammissibile E con Probabilità Pr(E), la probabilità dell’evento complementare Pr(non-E)
è pari a
Pr(non-E) = 1 – Pr(E)
2.2 Teorema della probabilità totale
Dati due eventi ammissibili A e B, non necessariamente mutuamente escludentisi (⇒ A∪B ≠∅), con
probabilità Pr(A), Pr(B), l’evento (A o B) è ammissibile, e la sua probabilità vale:
Pr(A ∪ B) = Pr(A)+ Pr(B) – Pr(A ∩ B)
2.3 Fenomeno aleatorio condizionato
Dato un fenomeno aleatorio descritto dallo spazio Ω ed un evento ammissibile Γ (cioè Pr(Γ)>0), si dice
fenomeno aleatorio condizionato all’evento Γ il fenomeno aleatorio ottenuto da quello di partenza
scartando i casi in cui l’evento Γ non si verifica. Rispetto al fenomeno aleatorio condizionato, il generico
evento E è rappresentato dall’insieme E ∩ Γ. Pertanto si definisce la probabilità condizionata di un evento
E rispetto a Γ il rapporto seguente:
3
Pr (E | Γ ) =
Pr (E ∩ Γ )
Pr (Γ )
2.4 Indipendenza Statistica
In generale, sapere che si è verificato l’evento Γ modifica la conoscenza circa il contemporaneo verificarsi
dell’evento E. Infatti:
Pr ( E Γ) ≠ Pr ( E )
Se la conoscenza che si sia verificato Γ non porta alcuna conoscenza riguardo ad E, i due eventi si dicono
statisticamente indipendenti. In particolare un evento E si dice statisticamente indipendente dall’evento Γ
se e solo se
Pr ( E Γ) = Pr ( E )
Se l’evento E è statisticamente indipendente dall’evento Γ risulta:
Pr ( E ∩ Γ ) = Pr (Γ ) Pr ( E )
2.5 Teorema di Bayes
Si consideri un fenomeno aleatorio complesso, cui siano associati due fenomeni aleatori semplici
interconnessi fra loro, di cui solo uno direttamente osservabile. Si consideri ad esempio un sistema di
trasmissione in cui il canale introduce un errore di trasmissione. Un primo fenomeno aleatorio è costituito
dall’emissione da parte della sorgente S di una sequenza di bit {ak = 0 o 1}. Il secondo fenomeno aleatorio
(interconnesso al primo) è costituito dalla ricezione da parte del destinatario D di una sequenza di simboli
{bk = 0 o 1} che, a causa degli errori introdotti dal canale, non coincide necessariamente con {ak}.
Le conoscenze a priori sulla sorgente si traducono sulla conoscenza delle probabilità con cui la sorgente
emette i simboli {ak}:
p0 = Pr(ak = 0)
p1 = Pr(ak = 1) = 1 - p0
Le conoscenze a priori sui meccanismi fisici di trasmissione nel canale si traducono sulla conoscenza
delle probabilità dei simboli ricevuti {bk} condizionate ai simboli emessi {ak}:
Pr(bk = 0 | ak = 0)
Pr(bk = 0 | ak = 1)
Pr(bk = 1 | ak = 0)
Pr(bk = 1 | ak = 1)
Il teorema di Bayes risponde alla domanda: se il simbolo ricevuto è bk = 1, qual è la probabilità che il
simbolo emesso sia stato ak = 1 ? ovvero, come si calcolano le seguenti probabilità a partire dalle Pr(ak) e
dalle Pr(bk | ak)
Pr(ak = 0 | bk = 0)
Pr(ak = 0 | bk = 1)
Pr(ak = 1 | bk = 0)
4
Pr(ak = 1 | bk = 1)
Enunciato del teorema di Bayes: Sia dato un processo aleatorio con spazio Ω, si consideri una partizione
completa {Γ1,...Γm} di Ω, (ovvero ∪j Γj = Ω con Γi ∩ Γj = ∅, i ≠ j), che corrisponde ad una serie completa
di eventi mutuamente escludentisi Γi ed un evento ammissibile E. Note le probabilità Pr(Γi), i = 1,…m, e
le probabilità condizionate Pr(E | Γi), i = 1,…m, la probabilità condizionata dell’evento Γh h = 1,…m
rispetto all’evento E, è data da:
Pr (Γh | E ) =
Pr (E | Γh )Pr (Γh )
∑ Pr (E | Γ )Pr (Γ )
m
j
j =1
j
3 Definizione di variabile aleatoria
Dato un esperimento aleatorio che è caratterizzato dallo spazio dei risultati Ω, abbiamo definito la
probabilità associata ad eventi e cioè sottoinsiemi di risultati che appartengono a Ω. La variabile aleatoria
mappa i singoli esiti del processo in valori reali. In particolare, vale la seguente definizione di variabile
aleatoria: dato uno spazio di probabilità caratterizzato dallo spazio dei risultati Ω e dalla probabilità P
associata ai suoi sottoinsiemi, si definisce variabile aleatoria X(ω) una qualsiasi funzione X : Ω→ R tale
che per ogni punto ξ di R l’insieme A corrispondente, A = {ω ∈ Ω, ω | − ∞ < X (ω ) ≤ ξ }, rappresenti un
evento ammissibile.
Una variabile aleatoria X(ω) si dice discreta se esiste un insieme S = {xi} finito o infinito numerabile tale
che ∑ P(ω | X (ω ) = xi ) = 1 (condizione di normalizzazione). Una variabile aleatoria si dice continua
xi ∈S
quando i valori che può assumere sono continui; in questo caso la precedente condizione di
normalizzazione vale in forma integrale.
3.1 Funzione distribuzione
La funzione distribuzione associata alla variabile aleatoria X, FX(x), è definita come la probabilità che la
variabile aleatoria X sia minore o uguale a x:
FX ( x ) =∆ Pr{X ≤ x}
Nella precedente notazione il simbolo maiuscolo (cioè X) indica la variabile aleatoria, mentre il
corrispondente simbolo minuscolo (cioè x) indica una “manifestazione” (e cioè un possibile valore) della
variabile aleatoria.
La funzione distribuzione FX(x) gode delle seguenti proprietà:
Non-negativa
Non-decrescente
FX ( x ) ≥ 0
FX ( x + ∆x ) ≥ FX ( x ), ∀ ∆x > 0
Continua da destra
5
lim FX ( x + ∆x ) = FX ( x ), ∆x > 0
∆x → 0
Tende a 0 al tendere a -∞ dell’argomento
lim FX ( x + ∆x ) = 0
∆x → −∞
Tende a 1 al tendere a +∞ dell’argomento
lim FX ( x + ∆x ) = 1
∆x → +∞
La probabilità di un evento ammissibile A, cui tramite la X corrisponde un insieme A(X) di R, può essere
calcolata tramite l’integrale:
Pr ( A) =
∫ dF (x )
A( X )
X
3.2 Funzione densità di probabilità
La funzione densità di probabilità della variabile aleatoria X, fX(x), è definita come la derivata della
funzione distribuzione rispetto a x:
f X (x ) =
dFX ( x )
dx
Due variabili aleatorie X1, X2 sono statisticamente indipendenti se e solo se è verificata la condizione
seguente per le funzioni densità:
f X 1 X 2 ( x1 , x2 ) = f X 1 ( x1 ) ⋅ f X 2 ( x2 )
o (equivalentemente) per le funzioni distribuzione:
FX 1 X 2 ( x1 , x2 ) = FX 1 ( x1 ) ⋅ FX 2 ( x2 )
Il valore medio di una variabile aleatoria X è definito dal seguente operatore:
E [x ] = ∫ xf X (x )dx
,
dove l’integrale viene fatto su tutto lo spazio di variabilità di X
X
Il valore quadratico medio è ottenuto applicando l’operatore E[.] alla variabile X2:
[ ]
E x 2 = ∫ x 2 f X ( x )dx
,
dove l’integrale viene fatto su tutto lo spazio di variabilità di X
X
La varianza della variabile aleatoria X, σ2, si ottiene come segue:
( )
σ 2 = E x 2 − [E ( x )] 2
6
4 Approfondimenti con esempi sulle variabili aleatorie
Questa sezione ha lo scopo di fornire una rassegna molto dettagliata delle caratteristiche delle variabili
aleatorie più comunemente usate nel campo delle comunicazioni.
Le variabili aleatorie possono essere di tipo continuo e discreto. La distinzione si fa in base all’insieme di
valori che la variabile può assumere. Se la variabile aleatoria può assumere solo un insieme finito di
valori si dice variabile aleatoria discreta. Pertanto mentre le variabili aleatorie sono contraddistinte dalle
relative funzioni densità (o le funzioni distribuzione di probabilità), le variabili aleatorie discrete sono
contraddistinte dai valori puntuali delle probabilità.
Di seguito sono dettagliate le caratteristiche dei tipi più comuni di variabili aleatorie. Alcune di queste
variabili possono essere particolarmente utili per caratterizzare, ad esempio, il canale di comunicazione e
le caratteristiche del traffico.
4.1 Variabili aleatorie discrete
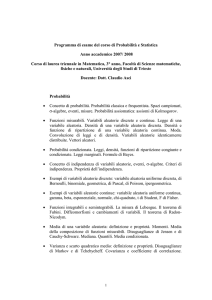
La distribuzione binomiale
Riferendoci ad un esperimento aleatorio, si ha dato evento A che ad ogni prova dell’esperimento si
verifica con probabilità p. Supponendo che l’esito dell’esperimento sia indipendente da prova a prova,
allora la probabilità che su N prove ripetute dell’esperimento, l’evento A sia stato soddisfatto X = k volte è
data dalla formula seguente (distribuzione di probabilità binomiale):
N
N −k
P rob {X = k } = p k (1 − p )
k
, k ∈ [0, 1, ..., N ]
N
N!
dove =
è il coefficiente binomiale.
k k!(N − k )!
Il valore medio di questa distribuzione è E[X] = np; la varianza vale Var[X] = np(1 - p).
Un esempio di distribuzione di probabilità binomiale è mostrato in Fig. 1.
7
0.25
Probabilità
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
x
12
14
16
18
20
Fig. 1: Distribuzione di probabilità binomiale per N = 20 e p = 0.2.
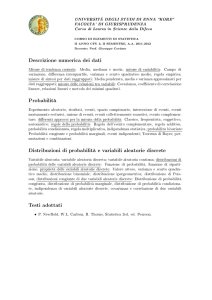
La distribuzione geometrica
Sia dato un esperimento aleatorio, in base al quale si definisce l’evento A che ad ogni prova si verifica con
probabilità p. Supponendo che l’esito dell’esperimento sia indipendente da prova a prova, il numero di
prove che occorre eseguire per aver verificato l’evento A è X = k secondo la seguente distribuzione di
probabilità geometrica:
P rob {X = k } = p (1 − p )
k −1
, k ∈ [1, 2, ...]
Il valore medio di questa distribuzione è E[X] = 1/p; la varianza vale Var[X] = (1 - p)/p2.
Un esempio di andamento della distribuzione geometrica è indicato nella Fig. 2.
8
0.2
0.18
0.16
Probabilità
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
5
10
15
20
25
x
Fig. 2: Distribuzione di probabilità geometrica per p = 0.2.
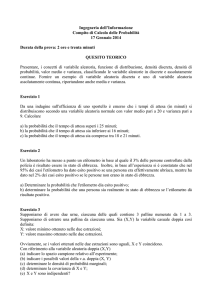
La distribuzione di Poisson
Una variabile aleatoria discreta X ha distribuzione di Poisson quando la probabilità che si verifichi
l’evento X = k per k = 0, 1, 2, … soddisfa la seguente formula:
ρ k −ρ
P rob {X = k } =
e
, k ∈ [0, 1, ...]
k!
dove ρ è un parametro (adimensionale) reale positivo; la distribuzione ha andamento decrescente con k,
ma al crescere di ρ divengono maggiormente significativi i valori con k più elevato.
Il valore medio di questa distribuzione è E[X] = ρ; la varianza vale Var[X] = ρ.
Un esempio che illustra l’andamento della distribuzione di Poisson è indicato in Fig. 3.
9
0.3
0.25
Probabilità
0.2
0.15
0.1
0.05
0
0
2
4
6
8
10
12
14
16
18
20
x
Fig. 3: Distribuzione di probabilità di Poisson per ρ = 2.
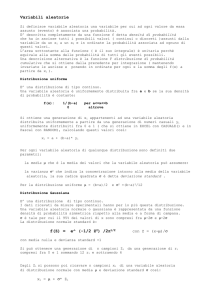
4.2 Variabili aleatorie continue
Distribuzione esponenziale
Una variabile aleatoria con distribuzione di esponenziale ha la seguente funzione densità:
f X (x ) =
1 − λx
e , x ∈ [0 , + ∞ )
λ
Il valore medio di questa distribuzione è E[X] = 1/λ (λ prende il nome di tasso e ha le dimensioni del
reciproco di x); la varianza vale Var[X] = 1/λ2.
5
4.5
4
Funzione densità
3.5
3
2.5
2
1.5
1
0.5
0
0
10
20
30
40
50
60
70
80
90
100
x
Fig. 4: Funzione densità di probabilità per un tasso λ = 0.2.
10
La distribuzione gaussiana
Una variabile aleatoria con distribuzione gaussiana con valore medio µ e varianza σ2 è caratterizzata dalla
seguente funzione densità:
f X (x ) =
1
2πσ
2
e
−
( x −µ )2
2 σ2
, x ∈ (− ∞ , + ∞ )
σ è la deviazione standard.
La funzione densità di una variabile aleatoria x gaussiana con valore medio µ = 0 e varianza σ2 = 1 è
rappresentata in Fig. 1.
0.4
0.35
Funzione densità
0.3
0.25
0.2
0.15
0.1
0.05
0
-10
-8
-6
-4
-2
0
2
4
6
8
10
x
Fig. 5: Funzione densità di probabilità per una variabile aleatoria gaussiana con valore medio nullo e
varianza unitaria.
La funzione distribuzione FX(x) associata alla densità gaussiana è ovviamente data dalla seguente
formula: FX (x ) =
x
∫ f (x ) dx . Tale integrale non può essere espresso in forma chiusa. Si introduce allora la
X
−∞
+∞
y2
2
x
1
x 1
= erfc
. Riferendoci ad una variabile aleatoria
1 − erf
2
2π x
2 2
2
gaussiana con valore medio nullo e varianza unitaria, allora la sua distribuzione FX(x) può essere ottenuta
come 1 – Q(x).
funzione Q( x ) =
1
∫e
−
dy =
La distribuzione gaussiana ha un’interessante proprietà che va sotto il nome di teorema del limite
centrale: la somma di n variabili aleatorie continue identicamente distribuite e statisticamente
11
indipendenti tende ad una variabile aleatoria gaussiana se n (questo vale qualsiasi sia la funzione densità
delle variabili aleatorie che si sommano).
La distribuzione lognormale
Una variabile aleatoria X è detta avere una distribuzione lognormale con parametri µ e σ, se ln(X) ha
distribuzione normale con valore medio µ e deviazione standard σ. Equivalentemente X = exp(Y), dove Y
ha distribuzione gaussiana con valore medio µ e deviazione standard σ.
E’ possibile dimostrare che questa variabile aleatoria ha la seguente funzione densità:
f X (x ) =
1
x 2πσ 2
e
−
(ln( x ) −µ )2
2σ2
, x ∈ (0 , + ∞ )
Il valore medio di questa distribuzione è E[X] = exp(µ + σ2/2); la varianza vale Var[X] = exp(2µ + 2σ2)exp(2µ + σ2). Un esempio di distribuzione lognormale è dato in Fig. 6 per µ = 0 e σ = 0.2.
10
Funzione densità
10
10
10
10
10
10
50
0
-50
-100
-150
-200
-250
0
10
20
30
40
50
60
70
80
90
100
x
Fig. 6: Funzione densità di probabilità per una variabile aleatoria lognormale con per µ = 0 e σ = 0.2.
La distribuzione lognormale serve per modellare la statistica del prodotto di un numero elevato di
variabili indipendenti ed indipendentemente distribuite (teorema del limite centrale per il prodotto).
Distribuzione di Rayleigh
Una variabile aleatoria X con distribuzione di Rayleigh ha la seguente funzione densità:
f X (x ) =
x
1 − 2σ2
e
, x ∈ [0 , + ∞ )
2σ 2
12
Il valore medio di questa distribuzione è E[X] =
la varianza vale Var[X] = (2 – π/2)σ2.
2 σ Γ(3 / 2 ) , dove Γ(x) indica la funzione Gamma di x;
Se X e Y sono due variabili aleatorie indipendenti con distribuzione gaussiana, valore medio nullo e
varianza σ2, allora la variabile Z = X2 + Y2 è distribuita secondo Rayleigh come indicato in precedenza.
Invece Z2 ha distribuzione chi-quadro centrale con due gradi di libertà.
Distribuzione di Rice
Una variabile aleatoria X con distribuzione di Rice ha la seguente funzione densità:
x −
f X (x ) = 2 e
σ
x2 +s2
σ2
xs
I 0 2 , x ∈ [0 , + ∞ )
σ
dove I0(x) rappresenta la funzione di Bessel modificata del primo tipo di ordine 0 e s è il parametro di
non-centralità.
Se X e Y sono due variabili aleatorie indipendenti con distribuzione gaussiana, valori medi µ1 e µ2
(rispettivamente) e stessa varianza σ2, allora la variabile Z = X2 + Y2 è distribuita secondo Rice come
indicato in precedenza, dove s2 = µ12 + µ22. Invece Z2 ha distribuzione chi-quadro non-centrale centrale
con parametro di non-centralità s.
13