Spazi affini ed euclidei
12 novembre 2009
1
Spazi affini
Richiamiamo alcune nozioni sulla nozione di spazio affine
Definizione 1. Si dice spazio affine di dimensione n su di un campo K una
terna AG(n, K) = (A, V, α) ove:
1. A è un insieme,
2. V è uno spazio vettoriale di dimensione n sul campo K e
3. α : A × A → V una applicazione tale che:
(a) per ogni P ∈ A e v ∈ V esiste un unico elemento Q ∈ A tale che
α(P, Q) = v;
(b) assegnati P, Q, R ∈ A si ha
α(P, Q) + α(Q, R) = α(P, R).
In generale, con leggero abuso di notazione, scriveremo P ∈ AG(n, K) per
indicare un punto P ∈ A.
Teorema 2. Osserviamo che, per ogni P ∈ A fissato l’applicazione α induce
una biiezione αP = α(P, ·) : A → V.
Dimostrazione. Sia v ∈ V. Per definizione di spazio affine esiste un punto
X ∈ A tale che α(P, X) = αP (X) = v; pertanto X è una preimmagine di v e
l’applicazione αP : A → V è suriettiva. D’altro canto, se esistessero X, Y ∈ A
tali che αP (X) = αP (Y) = v, allora avremmo
α(P, X) = αp (X) = v = αP (Y) = α(P, Y),
da cui X = Y, per definizione di α. Pertanto αP è anche iniettiva.
1
Teorema 3. Per ogni coppia di punti P, Q ∈ A si ha
α(P, Q) = −α(Q, P),
α(P, P) = 0.
Dimostrazione. Osserviamo innanzi tutto che
α(P, P) = α(P, P) + α(P, P).
Pertanto α(P, P) = 0. D’altro canto
α(P, Q) + α(Q, P) = α(P, P),
da cui segue α(P, Q) = −α(Q, P).
Definizione 4. Sia P ∈ A un punto e t ∈ V. L’unico punto Q ∈ A tale che
α(P, Q) = t
è detto traslato di P secondo il vettore t e si scrive come
Q = P + t.
(1)
Si noti che la funzione sopra definita è una applicazione + : A × V → A e
non è una operazione in A. Osserviamo che, in termini di vettori la (1) può
riscriversi per ogni fissato O ∈ A come
α(O, Q) = α(O, P) + α(P, Q) = α(O, P) + t,
(2)
e in questo caso la somma è effettivamente quella dello spazio vettoriale V.
Definizione 5. Si dice punto medio fra due punti P, Q ogni punto R tale che
α(P, R) = α(R, Q).
Teorema 6. Il punto medio di due punti, se esiste, è unico.
Dimostrazione. Osserviamo che se esiste almeno un punto R con le proprietà
richieste, da α(P, R) + α(R, Q) = α(P, Q) si deduce 2α(P, R) = α(P, Q). Pertanto,
1
R = P + α(P, Q),
2
e, chiaramente, tale punto è unico.
2
Osserviamo che se la nostra geometria è definita su di un campo di
caratteristica 2, ovvero un campo K in cui per ogni x ∈ K,
x + x = 0,
allora il punto medio di P e Q non esiste. In tutti gli altri casi la costruzione
è applicabile.
Definizione 7. Si dice sottospazio affine di (A, V, α) ogni insieme B tale che
l’immagine di α ristretta a B × B sia un sottospazio vettoriale W di V. In
particolare, W sarà detto giacitura di B, mentre la dimensione di B è definita
come
dim B = dim W.
Il seguente teorema è conseguenza immediata della definizione fornita.
Teorema 8. Sia (A, V, α) uno spazio affine, e B un suo sottospazio. Allora
(B, W, α 0 ) ove α 0 è la restrizione di α a B × B e W è l’immagine di α 0 è anche
esso uno spazio affine.
Definizione 9. Uno sottospazio affine di (A, V, α) di dimensione
1. 1 è detto retta;
2. 2 è detto piano;
3. 3 è detto solido;
4. dim A − 1 è detto iperpiano.
Teorema 10. Sia P ∈ A e W ≤ V. Allora, esiste un unico sottospazio affine B
passante per P e avente giacitura W. Tale spazio è detto spazio per P parallelo
a W.
Dimostrazione. Consideriamo l’insieme
B = {Q ∈ A : α(P, Q) ∈ W}.
(3)
Poiché 0 ∈ W, si ha P ∈ B. D’altro canto Q, R ∈ B implica
α(Q, R) = α(Q, P) + α(P, R) = α(P, R) − α(P, Q),
per cui la restrizione di α a B × B è un sottospazio di W. Dall’esistenza, ∀w ∈
W di Q ∈ A tale che α(P, Q) = w segue che la giacitura di B è effettivamente
tutto W. L’esistenza del sottospazio richiesto dal teorema segue.
3
Se vi fossero due sottospazi B e B 0 per P con B 6= B 0 , potremmo supporre
senza perdere in generalità che B 6⊆ B 0 . Pertanto, vi sarebbe almeno un
punto Q ∈ B \ B 0 . Poiché Q ∈ B, v = α(P, Q) ∈ W; d’altro canto, per ogni
vettore assegnato v ∈ W esiste esattamente un punto Q 0 in V tale che
α(P, Q 0 ) = v.
Dal fatto che la giacitura di B 0 è W segue che Q 0 ∈ W, contro l’ipotesi. Ne
deduciamo B = B 0 .
Osserviamo che l’applicazione α che compare nella (3) è quella definita
su tutto lo spazio AG(n, K); essa non è quella che dota B uno spazio affine,
in quanto αP per P ∈ B non è in generale una biiezione B → V. In effetti, si
dimostra che l’immagine di α 0 = α|B×B è proprio W.
Teorema 11. Per due punti distinti P, Q di uno spazio affine A passa una ed
una sola retta.
Dimostrazione. Sia B una retta passante per P e per Q e indichiamo con W
la sua giacitura. Osserviamo che α(P, Q) ∈ W, per definizione di sottospazio
affine. Inoltre α(P, Q) 6= 0. Poiché W ha dimensione 1, ne segue che α(P, Q) è
un generatore di W. L’unicità della retta segue dal teorema 10.
Definizione 12. Siano B, C due sottospazi affini di A di giaciture rispettivamente B e C. Si dice che B è parallelo a C (in simboli B k C) se
B ⊆ C oppure C ⊆ B
Conseguenza immediata della definizione e del Teorema 10 è il seguente
risultato.
Teorema 13. Sia r una retta di (A, V, α). Per ogni P ∈ A esiste un’unica retta
s tale che P ∈ s e r k s.
Lemma 14. Siano B e C due sottospazi affini di giaciture rispettivamente X e
Y e supponiamo B ∩ C 6= ∅. Se X ⊆ Y, allora B ⊆ C.
Dimostrazione. Fissiamo P ∈ B ∩ C. Allora,
B = {Q : α(P, Q) ∈ X} ⊆ {Q : α(P, Q) ∈ Y} = C.
La tesi segue.
Definizione 15. Sia P ⊆ A. Si dice chiusura affine P dell’insieme P il più
piccolo sottospazio affine contenente P.
4
Teorema 16. Sia P = {P0 , P1 , . . . , Pt } ⊆ A e poniamo per 1 ≤ i ≤ t
pi = α(P0 , Pi ).
Allora, per ogni 0 ≤ j ≤ t,
P = {Q : α(Pj , Q) ∈ hp1 , p2 , . . . , pt i} .
^ = hp1 , p2 , . . . , pt i. Sia
Dimostrazione. Sia W la giacitura di P. Poniamo W
^ Poiché pi ∈ W,
^
ora D lo spazio affine passante per P0 e avente giacitura W.
abbiamo Pi ∈ D per ogni i. Conseguentemente,
P ⊆ D.
Osserviamo che, poiché fatto Pi ∈ P segue
pi = α(P0 , Pi ) ∈ W.
^ ⊆ W. Dal fatto che P0 ∈ D ∩ P e dal Lemma 14 si deduce
Pertanto W
D ⊆ P.
Incidentalmente, osserviamo che P coincide con lo spazio passante per un
^ pertanto la tesi discende dal
qualsiasi suo punto e avente giacitura W;
Teorema 10.
Definizione 17. Un insieme P = {P0 , P1 , . . . , Pt } ⊆ A è detto indipendente
se dim P = t. Alternativamente, si dice che in questo caso i punti sono in
posizione generale (rispetto i sottospazi affini).
È facile dimostrare il seguente teorema, che caratterizza la nozione di
dimensione affine.
Teorema 18. Un sottospazio affine B ha dimensione t se, e solamente se, esso
contiene sottoinsiemi di t + 1 punti indipendenti ma nessun sottoinsieme di
t + 2 punti indipendenti. In particolare, B è generato da ogni suo sottoinsieme
di t + 1 punti indipendenti.
2
Riferimenti affini
Definizione 19. Si dice riferimento affine per lo spazio affine (A, V, α) una
coppia ordinata Γ = (O, B) ove O ∈ A e B = {b1 , . . . , bn } è una base ordinata
di V.
5
Siano (A, V, α) uno spazio affine e Γ = (O, B) un suo riferimento.
Definizione 20. Sia P ∈ A. Si dicono coordinata affine di P rispetto Γ la
n–upla
(p1 , p2 , . . . , pn )
delle componenti del vettore α(O, P) rispetto la base B.
Osserviamo che, in generale, α(O, P) = −α(P, O); pertanto, da
α(O, P) =
n
X
p i bi ,
α(O, Q) =
i=1
segue
n
X
q i bi
i=1
n
X
α(P, Q) = α(P, O) + α(O, Q) =
(qi − pi )bi .
i=1
Consideriamo ora un sottospazio W < V e un punto P ∈ A. Sia
W = {w1 , w2 , . . . , wt }
una base di W. Consideriamo il sottospazio affine W passante per P e avente
giacitura W. Per ogni punto Q ∈ W si ha
α(P, Q) = α(P, O) + α(O, Q) ∈ W.
Pertanto, per ogni Q esiste t ∈ W tale che
α(O, Q) = α(O, P) + t.
con t ∈ W, ovvero
α(O, Q) = α(O, P) +
t
X
αi wi
i=1
con αi ∈ K. Pertanto i punti in W sono tutti traslati di P secondo vettori in
W; viceversa, osserviamo che per ogni t ∈ W esiste un unico punto Q tale che
α(P, Q) = α(P, O) + α(O, Q) = t.
Poiché la giacitura di W è W, ne segue che Q ∈ W. Abbiamo dunque
dimostrato il seguente teorema.
Teorema 21. Lo spazio affine passante per P e parallelo a W è l’insieme di
tutti i traslati di P secondo i vettori di W.
6
Nel seguito denoteremo il vettore α(P, Q) con il simbolo Q − P. Osserviamo
che
α(P, Q) + α(Q, R) = (Q − P) + (R − Q) = (R − P) = α(P, R).
Indicheremo inoltre l’unico punto Q tale che α(P, Q) = v come
Q = P + v.
Supponiamo ora che
wi =
n
X
wij bj
j=1
e che P abbia coordinate (p1 , p2 , . . . , pn ). Allora, il generico punto Q ∈ W è del
tipo
t
X
1
2
n
1
2
n
(q , q , . . . , q ) = (p , p , . . . , p ) +
αj (w1j , w2j , . . . , wnj ),
j=1
ovvero
q1 = p1 + α1 w11 + . . . + αt w1t
q2 = p2 + α1 w21 + . . . + αt w2t
..
.
qn = p n + α w + . . . + α w
1
n1
t
(4)
nt
con αi ∈ K. Osserviamo che dati dei punti P0 , P1 , . . . , Pt , le equazioni del
sottospazio affine che essi generano si ottengono come base dell’insieme delle
soluzioni del sistema lineare omogeneo in αi e β
α1 p00 + α2 p10 + . . . + αn pn0 + α0 = 0
α1 p0 + α2 p1 + . . . + αn pn + α0 = 0
1
1
1
.
..
.
α p0 + α p1 + . . . + α pn + α = 0
1 t
2 t
n t
0
In particolare, i punti P0 , P1 , . . . , Pt sono indipendenti se, e solamente se, tale
spazio vettoriale ha dimensione n − t. In altre parole, i t + 1 assegnati
corrispondono a t + 1 condizioni lineari omogenee sullo spazio vettoriale di
dimensione n + 1 di tutte le equazioni in n + 1 incognite αi sul campo K. I
punti sono indipendenti se, e solamente se, tali condizioni sono linearmente
indipendenti.
Esempio 22. Consideriamo lo spazio affine AG(4, R) e supponiamo che si
vogliano determinare le equazioni del sottospazio B passante per i punti
P0 =(2, 2, 0, 0)T
P2 =(1, 0, 1, 0)T
P1 =(0, −2, 2, 0)T
P3 =(2, 1, −1, 1)T .
7
Per quanto visto prima, dobbiamo studiare il sistema
(5)
Aξ = 0
ove
2 2
0
0 −2 2
A=
1 0
1
2 1 −1
0
0
0
1
1
1
,
1
1
α1
α2
ξ=
α3 .
α4
α0
Svolgendo i calcoli, si ottiene che una base per lo spazio delle soluzioni di (5)
è data dall’insieme
{(−1, 1, 1, 2, 0), (−3, 1, −1, 0, 4)}.
Tale insieme corrisponde ad un insieme di generatori per l’annullatore dell’insieme {P0 , P1 , P2 , P3 }. Questo significa che le equazioni del sottospazio B
saranno
−x + y + z + t = 0
−3x + y − z = −4
Osserviamo che i 4 punti assegnati non sono indipendenti, in quanto dim B =
4 − 2 = 2. Avremmo potuto notare quest’ultimo fatto anche scrivendo B in
forma parametrica come nella (4). Infatti il punto generico di B ha coordinate
x
y
= P0 + β1 (P1 − P0 ) + β2 (P2 − P0 ) + β3 (P3 − P0 ) =
z
t
2
2
2
0
2
1
2
0 2
1 2
2
−2 2
+ β1 − + β2 − + β3 − =
1 0
−1 0
0
2 0
0
0
0
1
0
0
0
−2
−1
0
2
−1
0
2
2
−4
−2
−1 2
−2
−1
+β1 +β2 +β3 = +(2β1 +β2 ) +β3 =
0
2
1
−1 0
1
−1
0
0
0
1
0
0
1
0
−1
2
−2
−1
2
=
0 + µ 1 + β3 −1 .
1
0
0
Pertanto, i punti di B dipendono da solamente 2 parametri indipendenti e,
conseguentemente, la dimensione della giacitura risulta essere proprio 2.
8
Osserviamo che, nel caso affine, non vi è simmetria fra lo spazio delle
condizioni lineari (che ha dimensione n + 1) e lo spazio vettoriale soggiacente
AG(n, K) (che ha dimensione n). Vedremo in seguito come ovviare a questo
inconveniente.
Prima di concludere il presente paragrafo, osserviamo che se le equazioni
di un sottospazio affine B sono quelle del sistema lineare (matriciale)
AX = B,
(6)
allora i vettori w nella giacitura W di B sono tutti e soli quelli che soddisfano
il sistema lineare omogeneo associato
AX = 0.
(7)
Infatti, se P, Q sono due punti di B (in coordinate), allora AP = B e AQ = B;
pertanto, posto P − Q = α(P, Q), si ha A(P − Q) = 0. Viceversa, se P è un
punto di B e v un vettore tale che Av = 0, si ottiene
A(P + v) = AP + Av = AP = B,
da cui P + v ∈ B. Osserviamo comunque che vi è una differenza fondamentale
fra l’equazione (6) e l’equazione (7): la prima, infatti, lega fra loro le coordinate di punti di B; la seconda consente di determinare le componenti di vettori
di W, ove W è la giacitura di B stesso.
3
Cambiamenti di riferimento affine
Siano Γ = (O, B) e Γ 0 = (O 0 , B 0 ) due riferimenti affini per il medesimo
^ il vettore colonna delle
spazio AG(n, K). Sia P ∈ AG(n, K). Indichiamo con P
coordinate di P rispetto Γ e con P̃ il vettore colonna delle coordinate di P
rispetto Γ 0 . Osserviamo innanzi tutto che per ogni P ∈ AG(n, K) si ha
α(O 0 , P) = α(O 0 , O) + α(O, P) = α(O, P) − α(O, O 0 ).
Pertanto, chiamata T la matrice di cambiamento di base che ha per colonne i
vettori della base B 0 scritti come colonne rispetto la base B si ha
^ − T −1 O
^0
P̃ = T −1 (α(O 0 , P)) = T −1 (α(O, P) − α(O, O 0 )) = T −1 P
^ 0 si sono indicate le coordinate di O 0 rispetto il riferimento Γ .
Ove con O
In pratica, ogni cambiamento di riferimento affine ha la forma
^+B
P̃ = AP
ove A ∈ GLn (K) è la matrice di cambiamento di base da B a B 0 e B è
un vettore colonna di Kn , contenente le coordinate della vecchia origine O
rispetto il nuovo riferimento Γ 0 .
9
4
Affinità
Definizione 23. Sia (A, V, α) uno spazio affine Ogni trasformazione φ : A →
A tale che
^
Q))
α(φ(P), φ(Q)) = φ(α(P,
^ è una trasformazione lineare V → V è detta affinità di (A, V, α).
ove φ
In generale, l’immagine di una affinità φ è un sottospazio B di A. Chiara^ è invertibile, allora φ è una biezione.
mente, se φ
Teorema 24. Sia φ : A → A un’affinità e supponiamo che
B = {P + w : w ∈ W}
sia un sottospazio affine di AG(n, K). Allora
^
φ(B) = {φ(P) + w 0 : w 0 ∈ φ(W)}.
Dimostrazione. Sia Q ∈ B; chiaramente φ(Q) ∈ φ(B). Poiché φ(P) ∈ φ(B),
abbiamo che
^
α(φ(P), φ(Q)) = φ(α(P,
Q))
appartiene alla giacitura di φ(B); pertanto φ(W) ⊆ W 0 , ove W 0 è la giacitura
di φ(B). Sia ora w 0 ∈ W 0 . Allora il punto
Q 0 = φ(P) + w 0
appartiene a φ(B) e, conseguentemente, esiste un Q ∈ B tale che φ(Q) = Q 0 .
Pertanto,
^
w = α(φ(P), φ(Q)) = φ(α(P,
Q)),
da cui si deduce W 0 ⊆ φ(W). In particolare φ(B) è lo spazio passante per
φ(P) e parallelo a φ(W). La tesi discende ora dal Teorema 10.
Teorema 25. Sia φ una affinità di (A, V, α) e supponiamo che sia assegnato
un riferimento affine Γ . Allora, posto X = (x1 , x2 , . . . , xn )T si ha in coordinate
φ(X) = AX + B
ove B = (b1 , b2 , . . . , bn )T è un vettore che dipende solamente da φ.
^ e siano X, Y ∈ A. Allora
Dimostrazione. Sia A la matrice di φ
^ − X) = AY − AX
φ(Y) − φ(X) = φ(Y
10
da cui
φ(X) = AX − AY + φ(Y).
Posto Y = O e B = φ(O)
φ(X) = AX + B.
Osserviamo che una affinità invertibile si scrive in componenti rispetto un
fissato riferimento esattamente come un cambiamento di riferimento affine. I
due concetti però devono essere tenuti distinti:
1. un cambiamento di riferimento non altera le proprietà geometriche, ma
semplicemente il modo in cui le coordinate di un punto sono calcolate;
in particolare, un cambiamento di riferimento è una trasformazione
Kn → Kn (esso non agisce nemmeno sullo spazio vettoriale V sottostante
la geometria affine in considerazione).
2. una affinità è una trasformazione A → A che modifica i punti; incidentalmente, le coordinate risultano alterate.
Teorema 26. Una affinità φ di AG(n, K) è univocamente determinata dalle
immagini di n + 1 punti P0 , P1 , . . . , Pn in posizione generale.
Dimostrazione. Poiché i punti P0 , . . . , Pn sono in posizione generale, i vettori
bi = α(P0 , Pi )
con 1 ≤ i ≤ n formano una base B del sottospazio vettoriale V giacitura di
AG(n, K). Supponiamo esistano due affinità φ, ψ tali che
Qi = φ(Pi ) = ψ(Pi ).
Allora, in particolare
^ i ) = ψ(b
^ i ),
φ(b
^ = ψ.
^ Sia ora R ∈ AG(n, K) e poniamo r = α(P0 , R). Osserviamo
e dunque φ
che
^
α(Q0 , φ(R)) = α(φ(P0 ), φ(R)) = φ(r)
=
^
= ψ(r)
= α(ψ(P0 ), ψ(R)) = α(Q0 , ψ(R));
pertanto, ψ(R) = φ(R) per ogni R ∈ AG(n, K) e, conseguentemente, φ =
ψ.
11
5
Spazi euclidei
Definizione 27. Uno spazio affine (A, V, α) è detto spazio metrico se esiste
una funzione d : A × A → R tale che, per ogni P, Q ∈ A:
1. d(P, Q) = d(Q, P);
2. d(P, Q) ≥ 0 e d(P, Q) = 0 se, e solamente se, P = Q;
3. d(P, Q) ≤ d(P, R) + d(R, Q).
Esempio 28. Sia (A, V, α) uno spazio affine e supponiamo che Γ sia un suo
fissato riferimento. La funzione d : A × A → R data da
d(P, Q) = |{i : pi 6= qi }|
è una distanza. Essa è detta distanza di Hamming.
Definizione 29. Si dice spazio euclideo ogni spazio affine (A, V, α) ove V è
uno spazio vettoriale euclideo (i.e. dotato di prodotto interno).
Indicheremo in generale lo spazio euclideo di dimensione n sul campo K
con il simbolo EG(n, K). Ci limiteremo in queste note a considerare i casi
1. K = R e il prodotto interno è un prodotto scalare;
2. K = C e il prodotto interno è un prodotto Hermitiano.
In generale, ogni punto di EG(n, R) si può vedere come punto di EG(n, C);
inoltre il prodotto Hermitiano di EG(n, C), ristretto a EG(n, R) è un prodotto
scalare. Si dice pertanto che EG(n, R) è una sottogeometria di EG(n, C); viceversa, si dice che EG(n, C) è la complessificazione di EG(n, R). Osserviamo
comunque che EG(n, R) non è un sottospazio affine di EG(n, C).
Il significato della nozione sopra introdotta è che assegnato un ente in
EG(n, R) può aver senso vedere come tale oggetto si comporti nel momento in
cui lo si consideri nel più grande ambiente fornito da EG(n, C). Ad esempio,
la curva reale di equazione
x2 + y2 = −1
non ha punti in EG(2, R), ma è studiabile in EG(2, C).
Definizione 30. Sia (A, V, α) uno spazio euclideo, e siano P, Q ∈ A. Si dice
distanza euclidea di P da Q il numero reale positivo
p
d(P, Q) = hα(P, Q), α(P, Q)i = ||α(P, Q)||2 .
12
Per le proprietà della norma, la distanza euclidea soddisfa la Definizione
27. Pertanto, ogni spazio euclideo è effettivamente uno spazio metrico.
Osserviamo che sottospazi affini di uno spazio euclideo sono automaticamente spazi euclidei rispetto la struttura indotta.
Definizione 31. Sia B un sottospazio affine avente giacitura B e consideriamo P ∈ A. Si dice proiezione ortogonale di P su B il punto T ∈ B tale
che
α(P, T ) ∈ B⊥ .
Teorema 32. La proiezione ortogonale di P su B è unica.
Dimostrazione. Supponiamo che esistano due punti T, T 0 ∈ B tali che t =
α(P, T ) e t 0 = α(P, T 0 ) siano entrambi in B⊥ . Allora
α(T, T 0 ) = t 0 − t.
Poiché T, T 0 ∈ B, si ha α(T, T 0 ) ∈ B. D’altro canto t, t 0 ∈ B⊥ , da cui α(T, T 0 ) ∈ B⊥ .
Segue α(T, T 0 ) = 0, da cui T = T 0 .
In generale, scriveremo la proiezione di P su B con il simbolo T = ΠB (P).
Teorema 33 (Teorema di approssimazione). Sia P ∈ A. Allora, per ogni
B ∈ B si ha
d(P, ΠB (P)) ≤ d(P, B).
Dimostrazione. La dimostrazione è analoga a quella del teorema di approssimazione per la proiezione di vettori su spazi vettoriali.
Lemma 34. Siano b e t due vettori di V. Allora, la proiezione ortogonale di t
in direzione b è il vettore
ht, bi
Πb (t) =
b.
hb, bi
Dimostrazione. Abbiamo
ht, bi
ht, bi
t−
b, b = ht, bi − ||b||22
= 0.
hb, bi
||b||22
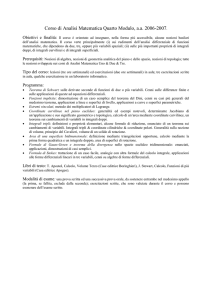
Sia A uno spazio euclideo e Γ = (O, B) un riferimento affine. Per ogni
punto P ∈ B è possibile introdurre due diverse coordinate: possiamo infatti
calcolare i coefficienti pi tali che
X
α(O, P) =
pi bi
i
13
p2
b
p2
P
b2
b1
p1 p1
Figura 1: Coordinate covarianti e controvarianti
esattamente come nel caso puramente affine, oppure possiamo determinare i
valori
hα(O, P), bi i
hΠbi (α(O, P)), bi i
pi =
=
hbi , bi i
||bi ||22
I valori pi sono detti coordinate controvarianti del punto, mentre i pi sono
detti coordinate covarianti.
Teorema 35. Siano P, Q ∈ EG(n, K) e supponiamo che per ogni i si abbia
pi = qi . Allora, P = Q.
Dimostrazione. Per ipotesi,
0 = pi − qi = hα(O, P), bi i − hα(O, Q), bi i = hα(O, P) − α(O, Q), bi i .
Poniamo α(O, P) − α(O, Q) = h. Osserviamo che per ogni r ∈ V si ha
hh, ri =
n
X
ri hh, bi i = 0
i=1
Da ciò si deduce h = 0, cioè α(O, P) = α(O, Q). Conseguentemente, P =
Q.
Definizione 36. Sia (A, V, α) uno spazio euclideo. Un riferimento affine
Γ = (O, E) è detto riferimento euclideo se E è una base ortonormale di V.
Teorema 37. Sia Γ un fissato riferimento euclideo. Allora, per ogni punto P e
per ogni indice 1 ≤ i ≤ n si ha
pi = pi .
14
Dimostrazione. Sia E = {e1 , . . . , en } una base ortonormale di V. Allora, per
ogni vettore t = α(O, P) si ha
t=
n
X
ht, ei i ei =
n
X
i=1
pi ei .
i=1
Segue pi = pi .
Definizione 38. Si dice coseno dell’angolo ϑ fra due vettori reali t, u il
numero
ht, ui
cos ϑ =
.
||t||2 ||u2 ||
Osserviamo che, per la disuguaglianza di Schwartz,
| cos ϑ| ≤ 1,
per ogni ϑ.
6
Distanza fra sottoinsiemi
Dati un punto P e un sottospazio affine B ≤ A è possibile definire la distanza
di P da B come
d(P, B) := d(P, ΠB (P)).
(8)
Tale quantità è ben definita grazie al Teorema 32, che garantisce l’esistenza
e unicità della proiezione ortogonale di P su B. Notiamo che d(P, B) = 0
se, e solamente se, P ∈ B. Per il Teorema 33 di approssimazione la (8) può
riscriversi come
d(P, B) = min d(P, Q).
(9)
Q∈B
A partire dalla (9), possiamo introdurre la più generale nozione di distanza
fra due sottoinsiemi B, C ⊆ A come il numero reale positivo
d(B, C) := min d(B, C).
B∈B
C∈C
Si noti che tale minimo esiste sempre, anche se non è detto che vi sia un’unica
coppia di punti B ∈ B e C ∈ C che lo realizza. In ogni caso abbiamo d(B, C) = 0
se, e solamente se, B ∩ C 6= ∅.
15
6.1
Distanza punto–iperpiano
Sia B un iperpiano di EG(n, R) Premettiamo una definizione.
Definizione 39. Sia ω un iperpiano di EG(n, K) e supponiamo che W sia
la sua giacitura. Si dice direzione normale a ω il sottospazio vettoriale
1–dimensionale W ⊥ .
Fissiamo un riferimento ortonormale Γ = (O, B) e supponiamo che l’equazione di B rispetto a Γ sia
B : f(x) = α1 x1 + α2 x2 + · · · + αn xn − α0 = 0.
(10)
Chiaramente il vettore n = (α1 , α2 , . . . , αn ) è non nullo; inoltre esso risulta perpendicolare a tutti i vettori della giacitura di B. Infatti, se w =
(w1 , . . . , wn ) = α(R, Q) = Q − R con R, Q ∈ B, allora
X
hw, ni =
αi (qi − ri ) = (f(Q) + α0 ) − (f(R) + α0 ) = 0.
i
Pertanto n identifica una direzione normale a B.
Consideriamo ora un punto P avente coordinate P = (p1 , p2 , . . . , pn ) rispetto Γ . Vogliamo calcolare d(P, B); a tal fine determiniamo il vettore
v = α(P, ΠB (P)). Innanzi tutto, osserviamo che v deve essere parallelo a
n. Consideriamo dunque la retta ` per P avente direzione n e calcoliamone
l’intersezione Q con B; tale punto sarà proprio la proiezione ortogonale di P
sul sottospazio. L’equazione parametrica di ` è
x1 = p1 + tα1
x2 = p2 + tα2
(11)
..
..
.
.
x = p + tα .
n
n
n
Mettendo a sistema con f(X) = 0 si ottiene che il punto ΠB (P) deve avere
coordinate corrispondenti alla soluzione in t di
α1 (p1 + α1 t) + α2 (p2 + α2 t) + · · · + αn (pn + αn t) − α0 = 0.
In particolare dalla (12) si deduce
X
(αi pi + α2i t) − α0 = f(p) + t||n||22 = 0,
i=1n
16
(12)
(13)
da cui
t=−
f(P)
.
||n||22
(14)
Sostituendo la (14) nella (11) si ottengono come coordinate per v = α(P, ΠB (P))
rispetto a Γ
f(P)
vi = −
αi .
||n||22
Tenuto conto dell’ortonormalità di B, la norma di v è data da
v
s
s
u n
2 X
uX
f(P)
f(P)2
2
v2i =
=
||v||2 = t
α
.
i
4
2
||n||
||n||
2
2
i=1
i
Pertanto, si ottiene come misura della distanza
d(P, B) =
6.2
|f(P)|
.
||n||2
(15)
Distanza fra 2 rette e retta di minima distanza
Siano ora ` e m due rette di EG(3, R). Supponiamo che le rispettive equazioni
parametriche siano date da
x = p 1 − v1 t
x = q1 + w1 u
` : y = p 2 − v2 t
m : y = q2 + w 2 u
z = p 3 − v3 t
z = q3 + w3 u.
Osserviamo che in componenti il vettore che congiunge un punto U di ` con
un punto V di m è
V − U = Q − P + wu + vt.
Dobbiamo minimizzare ψ(u, t) = ||V − U||22 . Un calcolo diretto mostra
ψ(u, t) = ||Q−P||22 +2u hQ − P, wi+2t hQ − P, vi+u2 ||w||22 +t2 ||v||22 +2tu hv, wi .
Calcolando il gradiente e sostituendo la definizione di V − U si ottiene
∇ψ = 2 (hV − U, wi , hV − U, vi) .
(16)
Pertanto, la distanza minima si realizza quando V − U è ortogonale contemporaneamente a ` e ad m. Distinguiamo ora due casi:
17
1. le rette ` e m sono parallele; allora, il sistema dato dalla (16) ha rango 1
e si trovano ∞1 possibili soluzioni; geometricamente, si ha che per ogni
punto P ∈ ` passa un piano π ortogonale sia ad ` che ad m; l’intersezione
di π con m è la proiezione di P su m e realizza la distanza minima;
2. le rette ` e m hanno direzione diversa; allora il sistema descritto dalla
(16) ha rango 2 e si trova un’unica soluzione in t ed u; geometricamente
questo corrisponde ad osservare che vi è un’unica retta, diciamo n
ortogonale sia ad ` che ad m e che le interseca entrambe; tale retta è
detta retta di minima distanza.
7
Prodotto vettoriale
Sia ora V uno spazio euclideo 3–dimensionale dotato di prodotto scalare e
B = (i, j, k) una sua base ortonormale orientata.
Definizione 40. Data una coppia di vettori v = (v1 , v2 , v3 ), w = (w1 , w2 , w3 )
diciamo prodotto vettoriale di v e w il vettore ottenuto calcolando il seguente
determinante formale
i
j
k
v × w = v1 v2 v3 .
w 1 w2 w3 Teorema 41. Valgono le seguenti proprietà:
1. v × w = −w × v;
2. v × w = 0 se, e solamente se, v e w sono linearmente indipendenti;
3. v × w è ortogonale sia a w che a w;
4. √
||v × w||2 = ||v||2 ||w||2 | sin ϑ|, ove ϑ è l’angolo fra v e w mentre | sin ϑ| =
1 − cos2 ϑ.
Dimostrazione. Le prime due proprietà sono una diretta conseguenza delle
proprietà dei determinanti.
Per quanto riguarda la terza, osserviamo che per ogni c = c1 i + c2 j + c3 k ∈
V,
v2 v3 v1 v3 v1 v2 −c2 j, j hc, v × wi = c1 i, i w1 w3 +c3 k, k w1 w2 =
w2 w3 c1 c2 c3 v
v
v
v3 v3 v2 c1 2
− c2 1
+ c3 1
= v1 v2 v3 .
w2 w 3
w1 w3
w 1 w2
w1 w 2 w3 18
Come caso particolare c = v oppure c = w si ha la terza proprietà. Per
quanto concerne la quarta proprietà, osserviamo che
X
X
X
||v||22 ||w||22 − hv, wi2 = (
v2i )(
wi )2 − (
vi w i ) 2 =
Xi X i
X i
X
v2i
w2j − (
vi wi )(
vj w j ) =
i
X
i,j
X
j
2 2
vi w j
v2i w2j +
i<j
−
X
i<j
X
−
v2i w2j
X
i,j
X
X
i
j
vi vj w i w j =
v2i w2i +
i
X
v2i w2j
i>j
vi w i vj w j +
i<jX
+
v2j w2i
X
−2
i<j
(v2i w2j − 2vi wi vj wj +
v2i w2i +
i
X
X
!
vi wi vj wj
=
i>j
vi w i vj w j =
i<j
v2j w2i )
=
i<j
X
(vi wj − vj wi )2 = ||v × w||22 .
i<j
Da questo segue la tesi.
In generale, il prodotto vettoriale non è invariante rispetto trasformazioni
ortogonali. In effetti, vale il seguente teorema.
Teorema 42. Sia A una qualsiasi trasformazione lineare di V; allora,
(Av) × (Aw) = (det A)(AT )−1 (v × w).
Dimostrazione. Sia u ∈ V un generico vettore. Innanzi tutto, osserviamo che
hAv × Aw, Aui = AT (Av × Aw), u .
(17)
D’altro canto, per ogni u ∈ V, si ha anche
hAv × Aw, Aui =
Au
u
u
det Av = det A v
= det A det v = h(det A)(v × w), ui . (18)
Aw
w
w
Siccome u è un vettore generico, deduciamo dalla (17) e dalla (18),
AT (Av × Aw) = det A(v × w)
da cui, poiché A è invertibile, segue la tesi.
19
(19)
8
Isometrie
Definizione 43. Sia EG(n, K) uno spazio euclideo. Si dice isometria ogni
trasformazione affine ξ : EG(n, K) → EG(n, K) tale che per ogni P, Q ∈
EG(n, K) si abbia
d(P, Q) = d(ξ(P), ξ(Q)).
È immediato vedere che ogni isometria ξ deve essere una trasformazione
invertibile; infatti, se ξ non fosse iniettiva, avremmo due punti P, Q con P 6= Q
e ξ(P) = ξ(Q). Questo comporterebbe
0 = d(ξ(P), ξ(Q)) = d(P, Q) 6= 0,
una contraddizione. In effetti possiamo dimostrare qualche cosa di più.
Teorema 44. Fissato un riferimento euclideo Γ , ogni isometria ξ di EG(n, K)
si scrive come
ξ(X) = QX + B
ove Q è una matrice unitaria.
Dimostrazione. Per il Teorema (25), ogni affinità (e quindi anche ogni isometria) si rappresenta in coordinate nella forma
ξ(X) = AX + B,
ove A è una matrice n × n. Osserviamo che per definizione di distanza
euclidea
hX − Y, X − Yi = ||X − Y||22 =
||ξ(X) − ξ(Y)||22 = hAX − AY, AX − AYi = hA? A(X − Y), X − Yi .
Pertanto,
hA? A(X − Y), X − Yi − hX − Y, X − Yi = h(A? A − I)(X − Y), X − Yi = 0
per ogni vettore X − Y ∈ V (ove V è la giacitura di EG(n, K)). Se ne deduce
A? A − I = 0, ovvero che A è una matrice unitaria.
Teorema 45. Siano t, u due vettori reali e γ una isometria. Allora il coseno
dell’angolo θ individuato da t e u coincide col cosendo dell’angolo individuato
da γ
^ (t) e γ
^ (u). In particolare t e u sono ortogonali se, e solamente se, γ(t) e
γ(u) lo sono.
20
Dimostrazione. Osserviamo che esiste una matrice unitaria A che descrive
l’azione di γ
^ sullo spazio vettoriale V; pertanto
h^
γ(b), γ
^ (u)i = hAb, Aui = hA? Ab, ui = hb, ui .
La tesi segue ora dalla definizione di isometria.
Definizione 46. Tutte le isometrie della forma ξ(X) = AX+B in cui det A = 1
sono dette dirette; quelle per cui det A = −1 sono chiamate inverse.
8.1
Isometrie del piano
Si vogliono caratterizzare tutte le isometrie di EG(2, R). Utilizziamo il Teorema 44 e osserviamo che una matrice reale è unitaria se, e solamente se,
essa è ortogonale. In particolare l’insieme di tutte le matrici ortogonali 2 × 2
è dato da quelle matrici
a11 a12
A=
a21 a22
tali che
a212 + a222 = 1,
a211 + a221 = 1,
(20)
e
(21)
a11 a12 + a21 a22 = 0.
Dalla (20), vediamo che possiamo sempre trovare ϑ, ϕ ∈] − π, π] tali che
a11 = cos ϑ,
a12 = sin ϕ,
a21 = sin ϑ,
q22 = cos ϕ
Pertanto, dalla (21) abbiamo
cos ϑ sin ϕ + sin ϑ cos ϕ = 0,
ovvero
sin(ϑ + ϕ) = 0.
Da quest’ultima relazione si deduce ϕ = −ϑ oppure ϕ = π − ϑ. Tenuto conto
che
sin(π − ϑ) = sin ϑ,
sin(−ϑ) = − sin ϑ
e
cos(π − ϑ) = − cos ϑ,
cos(−ϑ) = cos ϑ
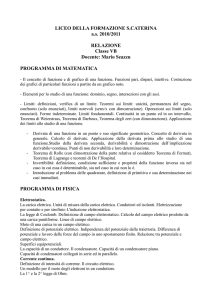
Si ottiene che la matrice A ha la forma
cos ϑ − sin ϑ
Rϑ =
sin ϑ cos ϑ
21
oppure
Mϑ =
Osserviamo che
cos ϑ sin ϑ
.
sin ϑ − cos ϑ
1 0
M ϑ = Rϑ
.
0 −1
− sin ϑ
cos ϑ
cos ϑ
sin ϑ
ϑ
Figura 2: Azione della matrice Rϑ
Forniamo ora una prima descrizione di alcune isometrie del piano:
1. una isometria del tipo τB (X) = X + B è detta traslazione di vettore B; tale
trasformazione lascia inalterata la giacitura di qualsiasi sottospazio
affine di EG(2, R) e, per B 6= 0, è priva di punti fissi;
2. una isometria del tipo ρθ (X) = A1 (θ)X è detta rotazione attorno l’origine
del riferimento. Essa per θ 6= 0 fissa solamente il punto O di coordinate
(0, 0, . . . , 0). Osserviamo che, in generale,
A1 (ϑ)A1 (µ) = A1 (ϑ + µ).
In particolare, tutte le rotazioni attorno l’origine del riferimento (equivalentemente, tutte le matrici ortogonali 2 × 2 a coefficienti reali con determinante +1) sono un gruppo, il gruppo speciale ortogonale SO(2, R).
1 0
3. l’isometria σ(X) =
X è detta riflessione di asse x2 = 0. Essa
0 −1
fissa tutti e soli i punti di coordinate (x1 , 0).
22
cos ϑ
sin ϑ
ϑ
− cos ϑ
sin ϑ
Figura 3: Azione della matrice Mϑ
Traslazioni e rotazioni sono isometrie di tipo diretto. Possiamo dimostrare ora
che la generica isometria del piano si può sempre scrivere come composizione
di un numero finito di traslazioni, rotazioni attorno l’origine e riflessioni
rispetto l’asse x2 = 0. Infatti, consideriamo la generica isometria
ξ(X) = QX + B
Distinguiamo due casi:
1. se det Q = 1, allora esiste un ϑ tale che Q = A1 (ϑ); pertanto possiamo
scrivere
ξ(X) = (τB σϑ )(X).
1 0
2. se det Q = −1, allora esiste un ϑ tale che Q = A1 (ϑ)
; pertanto,
0 −1
ξ(X) = (τb · σϑ · µ)(X).
23
Definizione 47. Due isometrie β e γ sono dette coniugate se esiste un’isometria δ tale che
β = δ−1 γδ.
Usando la precedente definizione possiamo introdurre le nozioni di rotazione
e riflessione arbitrarie.
Definizione 48. Si dice
1. rotazione ogni isometria coniugata ad una isometria della forma
ρθ = Rθ X,
con Rθ ∈ SOn (R);
2. riflessione ogni isometria coniugata a
1 0
σ(X) =
X.
0 −1
In particolare, una rotazione di un angolo θ attorno il punto P si scrive
come
(τP ρθ τ−P )(X) = A(X − P) + P = AX + (I − A)P.
Teorema 49. Sia µ una riflessione. Allora, esiste una retta r tale che ∀P ∈ r,
µ(P) = P.
Tale retta è detta asse di µ.
Dimostrazione. Per definizione di riflessione, esiste una isometria γ tale che
µ = γσγ−1 . Poiché γ è una affinità invertibile, l’immagine della retta di
equazione t : y = 0 secondo γ è a sua volta una retta, diciamo r. Per ogni
P ∈ r abbiamo Q = γ−1 (P) ∈ t; d’altro canto σ agisce come l’identità su t, per
cui
γσγ−1 (P) = γσ(Q) = γ(Q) = P.
La tesi segue.
Vale il seguente teorema.
Teorema 50. Sia µ una riflessione di asse r e sia P ∈ EG(2, R). Indichiamo
con Q la proiezione ortogonale di P su r. Allora,
α(P, Q) = α(Q, µ(P)).
In particolare, ogni riflessione è univocamente individuata dal suo asse.
24
Dimostrazione. Innanzi tutto, osserviamo che Q ∈ r implica µ(Q) = Q. Scriviamo ora µ = γσγ−1 . Siano P 0 = γ−1 (P), Q 0 = γ−1 (Q). Per il Teorema 45,
ogni isometria preserva l’ortogonalità. Pertanto il vettore α(P 0 , Q 0 ) = (p10 , p20 )
è ortogonale al vettore e1 = (1, 0). Questo significa p10 = 0 e
σ
^ (α(P 0 , Q 0 )) = (0, −p20 ) = −α(P 0 , Q 0 ) = α(Q 0 , P 0 ).
Dunque
α(µ(P), Q) =
µ
^ (α(P, Q)) = γ
^σ
^ γ^−1 (α(P, Q)) = γ
^ (α(Q 0 , P 0 )) = α(γ(Q 0 ), γ(P 0 )) = α(Q, P).
La tesi segue.
8.2
Isometrie dello spazio 3–dimensionale
Consideriamo ora il caso 3–dimensionale. Adatteremo le definizioni precedentemente viste.
Definizione 51. Una isometria della forma
ϕ(X) = A(X − B) + B
con A ∈ SO(3, R) è detta rotazione di centro il punto di coordinate B.
Teorema 52. Ogni matrice A ∈ SO(3, R) ammette 1 come autovalore. Inoltre,
se A 6= I, la molteplicità di 1 come autovalore è 1.
Dimostrazione. La matrice A è reale ortogonale e di ordine dispari; pertanto
essa ammette sempre almeno un autovettore reale con autovalore ±1. D’altro
canto, A, vista come matrice complessa risulta diagonalizzabile; ne segue che
essa o:
1. ha tre autovalori reali di modulo 1 e il cui prodotto è 1; pertanto almeno
uno di essi deve essere +1; se tutti e tre gli autovalori sono positivi,
allora A è la matrice identica; se due sono −1, allora la molteplicità
geometrica di 1 è 1.
2. ha un autovalore reale e due autovalori complessi coniugati della forma
eiϑ e e−iϑ . Il prodotto di tali autovalori complessi è pari ad 1; pertanto il restante autovalore reale deve essere 1; chiaramente esso ha
molteplicità 1.
La tesi segue.
25
Conseguenza del teorema precedente è che esiste sempre uno uno spazio
vettoriale V1 fissato da A.
Definizione 53. Sia ϕ una rotazione non identica di centro B associata alla
matrice A ∈ SO(3, R). Si dice asse di ϕ la retta passante per B e parallela a
V1 .
Teorema 54. Sia ϕ una rotazione, r il suo asse e P ∈ r. Allora ϕ(P) = P.
Dimostrazione. Poiché P appartiene all’asse di ϕ si ha
P = B + v,
con v ∈ V1 . Ne segue,
ϕ(P) = A(P − B) + B = A(B + v − B) + B = v + B = P.
In generale si può dimostrare che ogni matrice di A ∈ SO(3, R) si può
sempre scrivere come prodotto A = BCD di tre matrici della forma
cos φ sin φ 0
1
0
0
B = − sin φ cos φ 0 ,
C = 0 cos θ sin θ ,
0
0
1
0 − sin θ cos θ
cos ψ sin ψ 0
D = − sin ψ cos ψ 0 .
0
0
1
I tre angoli (φ, θ, ψ) sono detti angoli di Eulero della rotazione. In particolare
si ottiene
cos φ cos ψ − sin φ sin ψ cos θ sin φ cos ψ cos θ + cos φ sin ψ sin φ sin θ
A = − cos φ sin ψ cos θ − sin φ cos ψ cos φ cos ψ cos θ − sin φ sin ψ cos φ sin θ .
sin ψ sin θ
− cos ψ sin θ
cos θ
Euristicamente, la decomposizione A = BCD si dimostra facendo vedere che
1. ogni rotazione è univocamente individuata dal suo asse e da un angolo
φ;
2. una direzione può descriversi mediante due angoli ψ e θ.
Le traslazioni sono definite nel caso 3–dimensionale esattamente come
nel caso piano. Per quanto concerne le riflessioni, mostriamo direttamente
cosa accade in dimensione n.
26
Definizione 55. Sia EG(n, C) uno spazio euclideo e supponiamo che π sia
un iperpiano fissato. Si dice riflessione di asse π la trasformazione affine
µ che associa ad ogni P ∈ EG(n, C) il punto P 0 determinato dalla seguente
equazione
α(P, Ππ (P)) = α(Ππ (P), P 0 )
ove con Ππ (P) si è indicata la proiezione ortogonale di P su π.
Teorema 56. Ogni riflessione è una isometria.
Dimostrazione. Sia W = {w1 , w2 , . . . , wn−1 } una base ortonormale della giacitura W di π e consideriamo il riferimento affine Γ = (O, B) ottenuto completando W a base della giacitura di tutto lo spazio euclideo EG(n, K) mediante un versore in wn ∈ W ⊥ . Chiaramente, µ fissa tutti i punti di π. Sia
ora P = (p1 , p2 , . . . , pn−1 , pn )T ∈ EG(n, K) scritto in componenti rispetto il
riferimento fissato. Allora,
Ππ (P) = (p1 , p2 , . . . , pn−1 , 0)T .
Pertanto,
α(P, Ππ (P)) = (0, 0, . . . , 0, pn )T
e dunque
P 0 = Ππ (P) − α(P, Ππ (P)) = (p1 , p2 , . . . , pn−1 , −pn )T .
Mostriamo ora che per ogni P, Q ∈ EG(n, K) si ha d(P, Q) = d(µ(P), µ(Q)).
Infatti, passando in coordinate
2
d(P, Q) =
||α(P, Q)||22
= ||Q −
P||22
=
n
X
|qi − pi |2 =
i=1
n−1
X
|qi − pi |2 + |pi − qi |2 = ||µ(Q) − µ(P)||22 = d(µ(P), µ(Q))2 .
i=1
La tesi è pertanto verificata.
9
Normali e assi
Teorema 57. Siano P, Q due punti fissati con P 6= Q. Allora, l’insieme di
tutti i punti X ∈ EG(n, R) tali che d(P, X) = d(Q, X) è un iperpiano ω. Inoltre,
il punto medio M di P e Q appartiene ad ω e il vettore α(P, Q) identifica la
direzione normale ad ω.
27
Dimostrazione. Fissiamo un riferimento euclideo. Poiché
||α(P, X)||22 = ||α(Q, X)||22 ,
passando in coordinate, e tenuto conto della bilinearità del prodotto interno
di Rn si ottiene
n
n
X
X
2
(pi − xi ) =
(qi − xi )2 ,
i=1
i=1
da cui si deduce
n
X
((pi − xi ) + (qi − xi )) ((pi − xi ) − (qi − xi )) =
i=1
n
X
((pi + qi − 2xi )(pi − qi )) = 0.
i=1
In particolare, si vede che i punti di ω sono tutti e soli quelli che soddisfano
l’equazione lineare
n
X
i=1
1X 2
xi (pi − qi ) =
(pi − q2i );
2 i
n
ω è dunque un iperpiano. Se M è il punto medio fra P e Q, si ha
α(P, M) = α(M, Q),
da cui
d(P, M)2 = ||α(P, M)||22 = ||α(M, Q)||22 = d(Q, M)2 ,
cioè M ∈ ω.
Sia ora W la giacitura di ω. Poniamo v = α(P, Q) = (q1 − p1 , . . . , qn − pn )T
e consideriamo due punti X, Y ∈ ω. Sia w = α(X, Y) = (y1 −x1 , y2 −x2 , . . . , yn −
xn )T ∈ W. Abbiamo
n
X
hw, vi =
(yi − xi )(qi − pi ) =
i=1
n
X
i=1
yi (qi − pi ) −
n
X
i=1
1
1
xi (qi − pi ) = (p2i − q2i ) − (p2i − q2i ) = 0.
2
2
Pertanto, α(P, Q) 6= 0 è un generatore di W ⊥ .
28
Definizione 58. Si dice iperpiano assiale individuato da due punti P, Q ∈
EG(n, K) l’insieme di tutti i punti R ∈ EG(n, K) appartenenti all’iperpiano
passante per il punto medio fra P e Q e avente direzione normale generata
da α(P, Q).
Osserviamo che se K = R, per il Teorema 57, l’iperpiano assiale coincide
con il luogo di tutti i punti equidistanti da P e da Q; quando K = C ciò però
non è più vero.
In generale, comunque assegnato un iperpiano ω di EG(n, K) avente
equazione
n
X
βi xi = β0
(22)
i=1
è sempre possibile trovare un vettore
b = (β1 , β2 , . . . , βn )
tale che la giacitura di ω sia proprio lo spazio vettoriale
W = {x ∈ V : hx, bi = 0}.
In effetti, possiamo scrivere anche le coordinate dei punti dell’iperpiano
mediante prodotti interni, infatti l’equazione (22) si può sempre scrivere
anche come
(x1 , x2 , . . . , xn , 1), (β1 , . . . , βn , −β0 ) = 0.
10
Coniche
In questo paragrafo introdurremo la nozione di coniche come luoghi di punti
in un piano euclideo EG(2, R).
Definizione 59. Siano
1. F un punto di EG(2, R), detto fuoco
2. ` una retta di EG(2, R) con F 6∈ `, detta direttrice;
3. e ≥ 0 un numero reale, detto eccentricità.
Una conica è l’insieme dei punti P ∈ EG(2, R) tali che
d(P, F)
= e.
d(P, `)
29
(23)
Definizione 60. Una conica è detta:
1. ellisse se 0 ≤ e < 1;
2. parabola se e = 1;
3. iperbole se e > 1.
Fissiamo ora un riferimento euclideo opportuno; possiamo supporre senza
perdere in generalità che
1. la direttrice ` sia la retta x = 0;
2. il fuoco F abbia coordinate (k, 0);
3. il punto P abbia coordinate generiche (x, y).
Allora, la condizione diviene
d(P, F)
=
e=
d(P, `)
p
(x − k)2 + y2
.
|x|
Elevando al quadrato si vede che tale condizione è equivalente a
(1 − e2 )x2 − 2kx + y2 + k2 = 0.
30
(24)