TEORIA dei CIRCUITI
Ingegneria dell’Informazione
- BIPOLI E TRASFORMATEStefano Pastore
Dipartimento di Ingegneria e Architettura
Corso di Teoria dei Circuiti (105IN)
a.a. 2016-17
Sorgenti ideali di tensione e corrente
•
Una sorgente ideale di tensione mantiene il
valore della tensione costante qualunque sia
la corrente
•
Una sorgente ideale di corrente mantiene il
valore della corrente costante qualunque sia
la tensione
2
Bipoli LRI
Rappresentazione implicita
del bipolo:
a v(t ) b i (t ) hs (t )
• Rappresentazione esplicita di Thevenin:
hs (t )
b
v(t ) - i (t )
( a 0)
a
a
v(t ) R i (t ) vs (t )
• Rappresentazione esplicita di Norton:
a
hs (t )
i (t ) - v(t ) - (b 0)
b
b
i (t ) G v(t ) - is (t )
3
Modelli di Thevenin e Norton
• Se esistono entrambi (a ≠ 0, b ≠ 0), sono due
rappresentazioni diverse dello stesso bipolo
• Modello di Thevenin: v(t) = Ri(t) + vs(t)
• Modello di Norton: i(t) = Gv(t) - is(t)
4
Analisi della potenza
• Supponiamo che esista la rappresentazione
esplicita di Thevenin (vs(t) = Vs > 0, R > 0):
p (t ) v(t ) i (t ) R i (t ) Vs i (t ) R i (t ) 2 Vs i (t )
• Max potenza erogabile (potenza disponibile):
- Vs2
pd
4R
5
Generatori reali
• Tengono conto delle perdite interne del
generatore
1) Di tensione: modello di Thevenin
2) Di corrente: modello di Norton
• Rendimento:
pot. sul carico Pu
pot. erogata
Pe
6
Generatori reali (2)
• Chiudendo un gen. tens. Su un carico Ru si
ottiene:
Ru i 2 Ru
Vs Ru
Ru
V
i
Vs i
Vs
Rs Ru Vs Rs Ru
0 V 1
• Se Rs << Ru, allora V ≈ 1 e il generatore è
detto di tensione
• Chiudendo un gen. corr. Su un carico Gu si
ottiene:
Gu
I
Gs Gu
0 I 1
• Se Gs << Gu, allora I ≈ 1 e il generatore è
detto di corrente
7
Condensatore
• Componente lineare dinamico
• Rappresentazione differenziale:
dv(t )
i (t ) C
dt
v(0) V0
• Rappresentazione integrale
1
v(t ) V0 i ( )d
C0
t
• Energia immagazzinata ponendo V0 = 0
V(v variabile di stato)
EC (t ) p( )d C
t
v (t )
0
0
1 2
vdv Cv (t )
2
8
Induttore
• Componente lineare dinamico
• Rappresentazione differenziale:
di(t )
v(t ) L
dt
i (0) I 0
• Rappresentazione integrale
1
i (t ) I 0 v( )d
L0
t
• Energia immagazzinata ponendo I0 = 0
A (i variabile di stato)
E L (t ) p ( )d L
t
i (t )
0
0
1 2
idi Li (t )
2
9
Trasformate e fasori
• I fasori sono definiti per le funzioni
sinusoidali come:
u (t ) U e jwt U e j w t U
U cosw t U
dove : U U e jU
C
• Il vettore U in campo complesso è
detto FASORE. (N.B. L’angolo U si
misura sempre in rad)
• w è la frequenza angolare (rad/s)
2
1
w
, w 2 f , T
T
f
10
Utilità delle trasformate
• Le trasformate sono strumenti che
permettono una analisi matematica
semplificata di un problema
u(t) = u1(t) + u2(t)
U = U1 + U2
• Dove u(t) = {Uejwt}
11
Trasformata di Steinmetz
• Consideriamo l’insieme delle funzioni
sinusoidali isofrequenziali (w)
u (t ) A cosw t
• Ogni u(t) è identificata da una
ampiezza A e da una fase .
• Possiamo allora associare a ogni u(t)
un fasore U e viceversa.
• Trasformata di Steinmetz:
u (t ) U : U A, U 2k
U u (t ) : u (t ) U e jw t
• NB: sin(x) = cos(x-/2), cos(x) = sin(x+/2)
(e -j/2 = - j)
12
Interpretazione geometrica
• La funzione sinusoidale u(t) è la
proiezione del vettore rotante sull’asse
delle ascisse. Il vettore rotante
rappresenta la funzione per t = 0
• (Ricordiamo che: |e jwt| = 1)
13
Proprietà di linearità
• Comporre linearmente due o più
sinusoidi nel tempo equivale a
comporre i fasori corrispondenti
u1, u2: sinusoidi isofrequenziali (U1 e U2)
l1, l2 R
u (t ) l1u1 (t ) l2u 2 (t )
l U l U e
U e
l1 U1e jw t l2 U 2 e jw t
1
1
2
2
jw t
jw t
dove : U l1U1 l2U 2
• Abbiamo trovato il fasore U di u(t),
come combinazione lineare dei singoli
fasori
14
Proprietà della derivata
• Derivare una sinusoide equivale a
moltiplicare il fasore corrispondente
per jw
• u: funzione sinusoidale (U)
d
y (t ) u (t )
dt
d
d jw t
jw t
Ue
U e
dt
dt
jwU e Y e
jw t
dove : Y jwU
jw t
• Abbiamo trovato il fasore Y di y(t)
moltiplicando il fasore U per jw
15
Proprietà dell’integrale
• Per l’integrazione si procede
analogamente, dividendo U per jw:
U
Y
jw
N.B. moltiplicare per j equivale a ruotare
un vettore di +/2, mentre dividere per
j equivale a ruotare il vettore di –/2,
mantenendo in entrambi i casi il
modulo costante.
(j = e j/2, 1/j = -j = e -j/2)
• Applicheremo le trasformate ai circuiti
LRI e LDI
16
Applicazione dei fasori
• Circuito a regime con sorgente: vs(t) = Vs cos(wt + s)
• variabili: 6 [i1(t), i2(t), i3(t), v1(t), v2(t), v3(t)]
• Equazioni: 6 [1 I K, 2 II K, 3 costitutive]
- i1 (t ) i2 (t ) i3 (t ) 0
v (t ) - v (t ) 0
3
1
v3 (t ) - v2 (t ) 0
v1 (t ) - R1i1 (t ) vs (t )
i (t ) C dv3 (t )
3
dt
v (t ) R i (t )
2 2
2
17
Applicazione dei fasori (2)
• Essendo il circuito lineare e tempo-invariante
e la sorgente sinusoidale, le correnti e tensioni
sono sinusoidali. Definiamo i fasori associati:
vs (t ) Vs cos(w t s ) Vs Vs e j s
i1 (t ) I1 cos(w t i1 ) I1 I1e ji1
i2 (t ) I 2 cos(w t i 2 ) I 2 I 2 e ji 2
i3 (t ) I 3 cos(w t i 3 ) I 3 I 3e ji 3
v1 (t ) V1 cos(w t v1 ) V1 V1e jv1
v2 (t ) V2 cos(w t v 2 ) V2 V2 e jv 2
v3 (t ) V3 cos(w t v 3 ) V3 V3e jv 3
• Le incognite sono le ampiezze e fasi delle
sinusoidi, ovvero i moduli e le fasi dei fasori
associati
18
Applicazione dei fasori (3)
• Per le proprietà viste, operiamo la
trasformazione delle equazioni con la
trasformata di Steinmetz, utilizzando i fasori
appena introdotti.
• Le equazioni diventano:
- I1 I 2 I 3 0
V1 - V3 0
V - V 0
3 2
V1 - R1 I1 Vs
I C j wV
3
3
V2 R2 I 2
• Sono 6 equazioni complesse in 6 variabili
complesse
• Corrispondono a 12 equazioni reali in 12
variabili reali
19
Applicazione dei fasori (4)
• I fasori delle tensioni risultano essere:
1
R1
V1 V2 V3
Vs
1
1
jw C
R1 R2
R2 Vs
R1 R2 jw C R1 R2
V1
R2 Vs
R1 R2 2 w 2 C 2 R12 R22
v1 s - atan
w C R1 R2
R1 R2
2k
• Nel dominio del tempo si ottiene:
20
Circuiti resistivi e fasori
• Un circuito LRI (sorgenti sinusoidali
isofrequenziali) può essere descritto con il
tableau
A i (t ) 0
T
v
(
t
)
A
e(t )
Mv (t ) Ni (t ) h (t )
s
• Per PSE tutte le variabili del circuito sono
sinusoidali. Applicando Steinmetz, per la
proprietà della linearità, si ottiene
A I 0
T
V
A
E
MV NI H
s
• Si risolve il sistema nelle variabili complesse
(fasori) e poi si anti-trasformano i risultati.
21
Circuiti dinamici e fasori
• Un circuito LDI (sorgenti sinusoidali
isofrequenziali) può essere descritto con il
tableau aggiungendo le derivate delle tensioni
sui condensatori e delle correnti nelle
induttanze. Supponiamo che le sorgenti siano
sinusoidali isofrequenziali
A i (t ) 0
v(t ) A T e(t )
Mv (t ) Ni(t ) h s (t )
dv p (t )
i p (t ) C p
dt
v (t ) L diq (t )
q
q
dt
• Per PSE e per la proprietà della derivata dei
fasori, tutte le variabili a regime del circuito
saranno sinusoidali
22
Circuiti dinamici e fasori (2)
• Applicando la trasformata di Steinmetz alle
variabili sinusoidali a regime (e(t), v(t), i(t))
del circuito si ottiene
A I 0
T
V
A
E
MV NI H s
I j wC V
p
p
Vq jwLI q
• Il sistema lineare va risolto nei fasori (E, V, I)
delle variabili del circuito. Si può procedere
infine alla operazione di anti-trasformazione
per trovare le funzioni sinusoidali a regime
nel dominio del tempo
23
Circuiti e Laplace
• Consideriamo un circuito LRI o LDI
con sorgenti qualunque, purché
trasformabili con Laplace.
Applichiamo quindi la trasformata di
Laplace (unilatera):
L[ f (t )] F ( s )
t 0-
f (t )e - st dt
– Proprietà di linearità
– Proprietà della derivata
df (t )
L
sF
(
s
)
f
(
0
)
dt
– Proprietà dell’integrale
L
F ( s)
f ( )d
s
24
Circuiti e Laplace (2)
• Consideriamo un circuito LDI e
utilizziamo la trasformata di Laplace
A I ( s ) 0
V ( s ) A T E ( s )
MV ( s ) NI( s ) H s ( s )
I ( s ) C sV ( s ) - v (0)
p
p
p
Vq ( s ) L sI q ( s ) - iq (0)
• Prima risolvo il sistema nelle
trasformate delle variabili e poi
procedo alla anti-trasformazione. Il
procedimento è più complicato rispetto
ai fasori, ma dà molte informazioni in
più (transitorio e soluzione a regime
qualsiasi).
25
Elementi dinamici e trasformate
con i fasori
• Trasformando le relazioni costitutive si
ottiene:
I jwCV
dv
i C
1
I
dt V
jwC
V jwLI
di
v L
1
V
dt I
jwL
26
Impedenze e ammettenze
con i fasori
•
Le impedenze (ammettenze) sono definite
come estensione del concetto di resistenza
(conduttanza), ovvero come rapporto delle
trasformate della tensione e della corrente di
un bipolo (viceversa). Con i fasori:
V
z R jX z e j
I
I 1
1 - j
j y
y G jB y e e
V z
z
• z: impedenza [W]
• R: resistenza
• X: reattanza
• y: ammettenza [S]
• G: conduttanza
• B: suscettanza
27
Bipoli elementari e impedenze
con i fasori
• Applicando le proprietà dei fasori alle
relazioni costitutive, si ha
R:
V RI
C : I j wC V
L : V jw L I
V
I
R
1
V
I
jw C
1
I
V
j wL
• Da cui si ricavano le relative impedenze e
ammettenze:
z R R,
1
yR G
R
1
zC
,
jwC
z L jwL,
yC jwC
yL
1
jwL
28
Impedenza e ammettenza
con i fasori
• Nel dominio dei fasori, la relazione tra
l’impedenza e l’ammettenza è
1
1
y
z
z
y
y -
R
G
2
2
1
R
X
y
-X
z
B 2
R X2
29
Fase dell’impedenza
• Bipolo resistivo: = 0 (z = R)
• Bipolo capacitivo: = -/2 (z = 1/jwC)
• Bipolo induttivo: = /2 (z = jwL)
• Bipolo resistivo-capacitivo: -/2 < < 0
• Bipolo resistivo-induttivo: 0 < < /2
(Nel semipiano sinistro il bipolo eroga potenza)
30
Fasori e impedenze
• Per una generica impedenza z:
V z I V z I , V I z
V
V
I I
, I V - z
z
z
31
Fasori e impedenze (2)
• Resistenza R:
V R I V R I , V I
• Condensatore C:
1
V
I V
I , V I jw C
wC
2
1
• Induttore L:
V jw L I V w L I , V I
2
32
Fasori e riferimento di fase
• Consideriamo un bipolo in regime sinusoidale e
eseguiamo un cambiamento della coordinata tempo
con un Dt a piacere (sinusoide da - a +
v(t ) V e jwt
i (t ) I e jwt
t t ' Dt
i (t ' ) I e
Ie e
v(t ' ) V e e
D w Dt
i (t ' ) I e e
v(t ' ) V ' e
V ' Ve
I ' Ie
i (t ' ) I ' e
v(t ' ) V e jw ( t ' Dt ) V e jwDt e jwt '
jw ( t ' Dt )
jwDt
jD
jD
jD
jD
jwt '
jwt '
jw t '
jwt '
jwt '
33
Fasori e riferimento di fase (2)
• I moduli dei fasori calcolati nei due
riferimenti sono uguali, mentre le fasi sono
traslate dello stesso angolo D
• Questa traslazione di fase si manifesta in tutti
i fasori del circuito.
V ' V e jD
I ' Ie
jD
V ' V , V ' V D
I ' I , I ' I D
V V'
z V - I V '-I ' z
I
I'
34
Impedenze e ammettenze
con Laplace
• Trasformando con Laplace le relazioni
costitutive dei bipoli elementari, si
ottiene:
V ( s) R I ( s)
v(t ) Ri(t )
I ( s) G V ( s)
I ( s) sCV ( s) - Cv - (0)
dv(t )
i(t ) C
1
v
(
0
)
dt
I ( s)
V ( s)
sC
s
V ( s) sLI ( s) - Li - (0)
di(t )
v(t ) L
1
i
(0)
dt
I ( s) V ( s)
sL
s
35
Bipoli elementari e impedenze
con Laplace
• Le impedenze e ammettenze con
Laplace sono definite con condizioni
iniziali nulle, per cui si ha:
V ( s)
z (s)
I (s)
I ( s)
1
y (s)
V ( s) z ( s )
z R ( s ) R,
yR ( s) G
z L ( s ) sL,
1
yL (s)
sL
1
zC ( s )
,
sC
yC ( s ) sC
36
Laplace e modelli completi del
condensatore e dell’induttore
• Se consideriamo anche le condizioni
iniziali, i modelli del condensatore e
dell’induttore sono:
37
Serie di bipoli
• Due bipoli sono connessi in serie quando
sono percorsi dalla stessa corrente (le loro
tensioni si sommano)
• v = v1 + v2 , i = i 1 = i 2
• v1 = R1 i1, v2 = R2 i2,
• v = R1 i + R2 i = (R1 + R2) i = Rs i
Rs = R1 + R2
• L’espressione sopra si estende a un numero n
di resistori (resistenze)
• Nel caso di due soli componenti
• 1/Gs = 1/G1 + 1/G2 = (G1 + G2)/G1G2
G1G2
Gs
G1 G2
• NB: R --- cc R, R --- ca ca
• NB: R --- R ---… --- R nR
38
Parallelo di bipoli
• Due bipoli sono connessi in parallelo quando
sono sottoposti alla stessa tensione (le loro
correnti si sommano)
• i = i 1 + i 2 , v = v1 = v2
• i1 = G1 v1, i2 = G2 v2,
• i = G1 v + G2 v = (G1 + G2) v = Gp v
Gp = G1 + G2
• L’espressione sopra si estende a un numero n
di resistori (conduttanze)
• Nel caso di due soli componenti
• 1/Rp = 1/R1 + 1/R2 = (R1 + R2)/R1R2
R1 R2
Rp
R1 R2
• N.B. la Rp sarà sempre più piccola delle
resistenze R1 e R2
• NB: R//cc cc, R//ca R
• NB: R//R//…//R R/n
39
Partitori di tensione
Si può applicare
quando ho due o più
(N) bipoli in serie
v v1 v2 , i i1 i2
v1 R1i, v2 R2i, v ( R1 R2 )i
R1
R2
v1
v , v2
v
R1 R2
R1 R2
Rk
vk
v
R1 R2 RN
40
Partitori di tensione (2)
• Se ho solo 2 bipoli in serie, posso usare
le ammettenze
1 / G1
G2
v1
v
v
1 / G1 1 / G2
G1 G2
G1
v2
v
G1 G2
• N.B. i componenti devono essere
percorsi dalla stessa corrente perché la
regola del partitore sia applicabile
41
Partitori di corrente
Si può applicare
quando ho due o più
(N) bipoli in parallelo
i i1 i2 , v v1 v2
i1 G1v, i2 G2 v, i (G1 G2 )v
G1
G2
i1
i, i2
i
G1 G2
G1 G2
Gk
ik
i
G1 G2 GN
42
Partitori di corrente (2)
• Con due bipoli in parallelo, posso usare
le resistenze
1 / R1
R2
i1
i
i
1 / R1 1 / R2
R1 R2
R1
i2
i
R1 R2
• N.B. Scorre più corrente nel ramo con
resistenza minore (vedi sistemi di terra)
43
Bipoli dinamici notevoli
• Consideriamo la serie di una resistenza e di
un condensatore (R, C > 0)
1
1
z R
R- j
j wC
wC
44
Bipoli dinamici notevoli (2)
• Consideriamo il parallelo di una resistenza e
di un condensatore (R, C > 0)
1
R
R
j wC
z
1
1 jwCR
R
j wC
R
- wCR 2
j
2 2 2
1w C R
1 w 2C 2 R 2
45
Bipoli dinamici notevoli (3)
• Consideriamo la serie di una resistenza e di
un induttore (R, L > 0)
z R j wL
46
Bipoli dinamici notevoli (4)
• Consideriamo il parallelo di una resistenza e
di un induttore (R, L > 0)
R jwL
z
R jw L
Rw 2 L2
wLR 2
2
j 2
2 2
R w L
R w 2 L2
47
Circuiti risonanti reali serie
• Consideriamo la serie di una resistenza, di un
induttore e di un condensatore (R, L, C > 0)
1
z R jw L
R
j wC
1
j wL
wC
• La reattanza si annulla in w0, frequenza di
risonanza
1
1
0 w0
wC
LC
X s 0 per w w0 (comportamento res - ind)
X s wL -
X s 0 per w w0 (comportamento res - cap)
48
Circuiti risonanti serie reali (2)
• In w0 abbiamo il minimo dell’impedenza (z =
R), il cui modulo tende all’infinito per w 0
e per w
• Se alimentiamo il circuito risonante con una
sorgente di tensione sinusoidale costante in
ampiezza, otteniamo il massimo della
corrente alla frequenza di risonanza
• È il più semplice filtro passa-banda
49
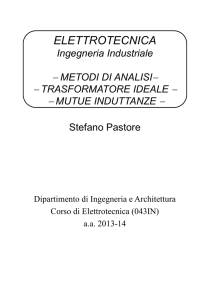
Circuiti risonanti serie reali (3)
• Rappresentazione grafica dei fasori relativi a un
circuito risonante serie reale, dove la corrente è: i(t) =
|I| cos(wt + i) A
• Conta lo sfasamento relativo tra tensione e corrente
(angolo ), non il valore assoluto della fase che
dipende dall’origine (arbitraria) dell’asse temporale
50
Circuiti risonanti parallelo reali
• Sono equivalenti a quelli serie. Invece della
impedenza, calcoleremo l’ammettenza (si
scambiano tra loro tensioni e correnti)
51
Teorema di Thevenin
• Consideriamo un bipolo LRI collegato al
resto del circuito tramite due terminali
v(t ) Req i (t ) veq (t )
52
Teorema di Thevenin (2)
• Ogni bipolo LRI ben posto e controllato in
corrente può essere sostituito con la serie di
un generatore ideale di tensione e di una
resistenza, calcolati opportunamente, senza
influenzare la soluzione di un qualsiasi
circuito esterno connesso al bipolo stesso.
• Req: si calcola spegnendo tutti i generatori
indipendenti (tensione: corto circuito,
corrente: circuito aperto)
• veq(t) tensione a vuoto ai morsetti con tutti i
generatori inseriti
53
Teorema di Thevenin (3)
• La caratteristica di un bipolo LRI è
• Se la caratteristica deve essere la stessa in
entrambi i casi, l’equazione diventa (Req ruota
la retta, veq la trasla)
v(t ) Req i (t ) veq (t )
v(t ) veq (t )
i (t )
Req
Req
54
Teorema di Norton
• Consideriamo un bipolo LRI collegato al
resto del circuito tramite due terminali
i (t ) Geq v(t ) - ieq (t )
55
Teorema di Norton (2)
• Ogni bipolo LRI ben posto e controllato in
tensione può essere sostituito con il parallelo
di un generatore ideale di corrente e di una
conduttanza, calcolati opportunamente, senza
influenzare la soluzione di un qualsiasi
circuito esterno connesso al bipolo stesso.
• Geq: si calcola spegnendo tutti i generatori
indipendenti (tensione: corto circuito,
corrente: circuito aperto)
• ieq : corrente di corto circuito ai morsetti con
tutti i generatori inseriti
56
Thevenin e Norton
• Tutti i bipoli LRI descritti da una
caratteristica obliqua hanno entrambi
gli equivalenti
• Fanno quindi eccezione i bipoli la cui
retta è verticale o orizzontale (sorgenti
ideali di tensione con in parallelo una
resistenza e sorgenti ideali di corrente
con i serie una resistenza)
• Per i bipoli LDI si ricorre ai fasori o
alla trasformata di Laplace; gli
equivalenti di Thevenin e di Norton si
trovano con le stesse regole
veq (t )
1
Geq
, ieq (t )
veq (t ) Geq
Req
Req
57
Sorgenti indipendenti ideali
• Fanno eccezione i bipoli la cui retta è
verticale o orizzontale (sorgenti ideali
di tensione con in parallelo una
resistenza e sorgenti ideali di corrente
con in serie una resistenza)
58
Thevenin, Norton e trasformate
• Per i bipoli LDI si ricorre ai fasori o a
Laplace; gli equivalenti di Thevenin e di
Norton si trovano con le stesse regole,
sostituendo le impedenze e le ammettenze alle
resistenze e alle conduttanze, rispettivamente,
e i fasori o le trasformate di Laplace alle
grandezze nel dominio del tempo. Con i
fasori, ad esempio:
V Z eq I Veq
I YeqV - I eq
1
Yeq
,
Z eq
I eq
Veq
Z eq
VeqYeq
59
Teorema di Millmann I
• È un’applicazione del teorema di Norton
vs1 vs 3
is 4
R1 R3
vu
1
1
1
R1 R2 R3
60
Teorema di Millmann II
• È un’applicazione del teorema di Thevenin
R1is1 vs 2
I
R1 R3
61