ELETTROTECNICA
Ingegneria Industriale
- BIPOLI E TRASFORMATEStefano Pastore
Dipartimento di Ingegneria e Architettura
Corso di Elettrotecnica (043IN)
a.a. 2016-17
Classificazione dei componenti
•
Dipende dalle equazioni costitutive del
modello del componente, se è lineare o no,
dinamico (con derivata) o algebrico, con
parametri costanti o variabili nel tempo
o Lineari
o Non-lineari
o Resistivi
o Dinamici
o Tempo-invarianti (T-I)
o Tempo-varianti (T-V)
•
Le scelte non sono mutuamente esclusive,
ma vanno applicate una alla volta a ogni
componente
2
Classificazione: esempi
• v(t) = R i(t) (resistenza) bipolo,
lineare, resistivo, T-I
• i(t) = I0 (e v(t)/v - 1) (diodo) bipolo,
nonlineare, resistivo, T-I
T
• v(t) = R(t) i(t) (p.e. interruttore)
bipolo, lineare, resistivo, T-V
• i(t) = C dv(t)/dt (condensatore)
bipolo lineare (Q = C V), dinamico, T-I
• I circuiti si classificano in base ai
componenti
3
Sorgenti ideali di tensione e corrente
•
Una sorgente ideale di tensione mantiene il
valore della tensione costante qualunque sia
la corrente erogata
•
Una sorgente ideale di corrente mantiene il
valore della corrente costante qualunque sia
la tensione
4
Legge di Ohm
• Le resistenze sono componenti a due
terminali che dissipano l’energia
elettrica. L’equazione costitutiva è
chiamata “legge di Ohm”, dove il
coefficiente R è detto resistenza
v(t) = R i(t)
• L’inverso della resistenza è chiamata
conduttanza (G = 1/R)
i(t) = G v(t)
5
Legge di Ohm (2)
• Il coefficiente di proporzionalità R è
chiamato “resistenza” e si misura in
[W]. Per un conduttore cilindrico, vale
la relazione
l
Rr
S
• Dove r è la resistività del materiale, l
la lunghezza e S la sezione
• La conduttanza G si misura in [W-1] o
in [S]
• La potenza dissipata vale
p = vi = Ri2 = Gv2
6
Metodo del Tableau
• Abbiamo scritto le equazioni
topologiche (IK e IIK) di un circuito:
2 b incognite
b equazioni di Kirchhoff
• Mancano ancora b equazioni per
completare il sistema, ovvero le
equazioni costitutive dei componenti
• Il sistema complessivo che si ottiene si
chiama Tableau. Se i componenti sono
lineari e resistivi, il Tableau è descritto
da una matrice
7
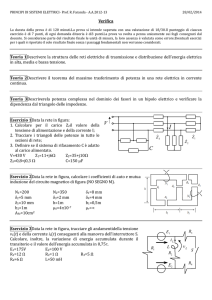
Tableau: esempio
• Circuito lineare resistivo T-I
• 3 nodi, 4 rami (4 c, 4 ddp) 8 incognite
• 2 IK, 2 IIK, 4 costitutive 8 equazioni
is i1 0
- i1 i2 i3 0
v - v - v 0
1
2
s
v2 - v3 0
v V
s
s
v1 - R1 i1 0
v2 - R2 i2 0
v - R i 0
3 3
3
8
Tableau: matrice
• Il sistema lineare in forma matriciale
(matrice T) è
1
0
0
0 0
0
0 is 0
1
0 - 1
i 0
1
1
0
0
0
0
1
0
0
0
0
1 - 1 - 1 0 i2 0
0
0
0
0
0
0
1
1
i3 0
0
0
0
0
1 0
0
0 vs Vs
0
R
0
0
0
1
0
0
v1 0
1
0
0
- R2
0
0 0
1
0 v2 0
0
0
-R 0 0
0
1 v3 0
0
3
T
• Il circuito è ben posto se si ha
det T ≠ 0
9
Sistemi Tableau
• Se aggiungo un componente nonlineare
come il diodo, il sistema tableau
diventa nonlineare, non più esprimibile
quindi con una matrice
• Se aggiungo un condensatore o un
induttore, devo aggiungere alle
variabili le derivate delle tensioni o
delle correnti, o entrambe, e le relative
condizioni iniziali. Il sistema sarà
dinamico
• Se aggiungo un interruttore ottengo un
sistema T-V
• Ci occuperemo di sistemi lineari,
resistivi o dinamici, T-I (LRI, LDI)
10
Proprietà della matrice tableau
• Per circuiti LRI:
• T: [2b×2b]
i 0
T
h
(t)
v
s
• Consideriamo det(T) per determinare il
numero di soluzioni
• det(T) ≠ 0: circuito ben posto, una soluzione
• det(T) = 0:
– Infinite soluzioni (modello insufficiente)
– Nessuna soluzione (modello errato)
11
Principio di sovrapposizione
degli effetti (PSE)
• E’ il principio fondamentale dei circuiti
lineari
Sia N un circuito LRI con un’unica
soluzione, alimentato da N sorgenti
indipendenti di tensione e M sorgenti
indipendenti di corrente.
Allora ogni potenziale di nodo, tensione o
corrente di ramo può essere espressa
come combinazione lineare delle sorgenti
indipendenti, con coefficienti costanti
che dipendono dai parametri omogenei
del circuito, ma non dipendono dai valori
delle sorgenti stesse.
12
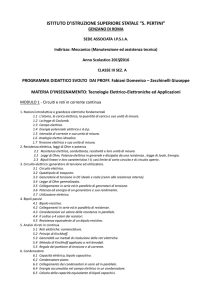
PSE: esempio 1
• Circuito LRI con 2 sorgenti di tensione
indipendenti
• Applicando PSE alla tensione v3(t) si
ottiene
v3(t) = a1 vs1(t) + a2 vs2(t) =
= v3’(t) + v3” (t)
13
PSE: esempio 1 (2)
• Dove
v3(t) = v3’(t) = a1 vs1(t) se vs2(t) = 0 V
v3(t) = v3”(t) = a2 vs2(t) se vs1(t) = 0 V
• Sorgente di tensione nulla corto circuito
• Sorgente di corrente nulla circuito aperto
• Quindi (coefficienti ak sono numeri puri)
v3 (t )
R2 // R3
a1
vs1 (t ) v (t )0 R1 R2 // R3
s2
R1 // R3
a v3 (t )
2
vs 2 (t ) v (t )0 R2 R1 // R3
s1
14
PSE: esempio 2
• Circuito LRI con 1 sorgente di tensione
e 1 di corrente indipendenti
• Applicando PSE alla tensione v3(t) si
ottiene
v3(t) = a1 vs1(t) + r2 is2(t) =
= v3’(t) + v3” (t)
• Il coefficiente r2 ha le dimensioni di
una resistenza
15
Bipoli LRI
Rappresentazione implicita
del bipolo:
a v(t ) b i (t ) hs (t )
• Rappresentazione esplicita di Thevenin:
hs (t )
b
v(t ) - i (t )
( a 0)
a
a
v(t ) R i (t ) vs (t )
• Rappresentazione esplicita di Norton:
hs (t )
a
i (t ) - v(t )
(b 0)
b
b
i (t ) G v(t ) is (t )
16
Modelli di Thevenin e Norton
• Se esistono entrambi (a ≠ 0, b ≠ 0), sono due
rappresentazioni diverse dello stesso bipolo
• Modello di Thevenin: v(t) = Ri(t) + vs(t)
• Modello di Norton: i(t) = Gv(t) - is(t)
17
Analisi della potenza
• Supponiamo che esista la rappresentazione
esplicita di Thevenin (vs(t) = Vs > 0, R > 0):
p (t ) v(t ) i (t ) R i (t ) Vs i (t ) R i (t ) 2 Vs i (t )
• Max potenza erogabile (potenza disponibile):
- Vs2
pd
4R
18
Generatori reali
• Tengono conto delle perdite interne del
generatore
1) Di tensione: modello di Thevenin
2) Di corrente: modello di Norton
• Rendimento:
pot. sul carico Pu
pot. erogata
Pe
19
Generatori reali (2)
• Chiudendo un gen. tens. Su un carico Ru si
ottiene:
Ru i 2 Ru
Vs Ru
Ru
V
i
Vs i
Vs
Rs Ru Vs Rs Ru
0 V 1
• Se Rs << Ru, allora V ≈ 1 e il generatore è
detto di tensione
• Chiudendo un gen. corr. Su un carico Gu si
ottiene:
Gu
I
Gs Gu
0 I 1
• Se Gs << Gu, allora I ≈ 1 e il generatore è
detto di corrente
20
Condensatore
• Componente lineare dinamico
• Rappresentazione differenziale:
dv(t )
i (t ) C
dt
v(0) V0
• Rappresentazione integrale
1
v(t ) V0 i ( )d
C0
t
• Energia immagazzinata (V0 = 0 V)
EC (t )
p( )d
t
0
C
v (t )
0
1 2
vdv Cv
2
21
Induttore
• Componente lineare dinamico
• Rappresentazione differenziale:
di(t )
v(t ) L
dt
i (0) I 0
• Rappresentazione integrale
1
i (t ) I 0 v( )d
L0
t
• Energia immagazzinata (I0 = 0 A)
E L (t )
t
0
1 2
p ( )d L idi Li
2
0
i (t )
22
Trasformate e fasori
• I fasori sono definiti per le funzioni
sinusoidali come:
u (t ) U e jwt U e j w t U
U cosw t U
dove : U U e jU
C
• Il vettore U in campo complesso è
detto FASORE. (N.B. L’angolo U si
misura sempre in rad)
• w è la frequenza angolare (rad/s)
2
1
w
, w 2 f , T
T
f
23
Utilità delle trasformate
• Le trasformate sono strumenti che
permettono una analisi matematica
semplificata di un problema
u(t) = u1(t) + u2(t)
U = U1 + U2
• Dove u(t) = {Uejwt}
24
Trasformata di Steinmetz
• Consideriamo l’insieme delle funzioni
sinusoidali isofrequenziali (w)
u (t ) A cosw t
• Ogni u(t) è identificata da una
ampiezza A e da una fase
• Possiamo allora associare a ogni u(t)
un fasore U e viceversa
• Trasformata di Steinmetz:
u (t ) U : U A, U 2k
U u (t ) : u (t ) U e jw t
• NB: sin(x) = cos(x-/2), cos(x) = sin(x+/2)
(e -j/2 = - j)
25
Interpretazione geometrica
• La funzione sinusoidale u(t) è la
proiezione del vettore rotante sull’asse
delle ascisse. Il fasore U rappresenta il
vettore per t = 0
• (Ricordiamo che: |e jwt| = 1)
26
Proprietà di linearità
• Comporre linearmente due o più
sinusoidi nel tempo equivale a
comporre i fasori corrispondenti
u1, u2: sinusoidi isofrequenziali (U1 e U2)
l1, l2 R
u (t ) l1u1 (t ) l2u 2 (t )
l U l U e
U e
l1 U1e jw t l2 U 2 e jw t
1
1
2
2
jw t
jw t
dove : U l1U1 l2U 2
• Abbiamo trovato il fasore U di u(t)
come combinazione lineare dei singoli
fasori
27
Proprietà della derivata
• Derivare una sinusoide equivale a
moltiplicare il fasore corrispondente
per jw
• u: funzione sinusoidale (U)
d
y (t ) u (t )
dt
d
d jw t
jw t
Ue
U e
dt
dt
jwU e jw t Y e jw t
dove : Y jwU
• Abbiamo trovato il fasore Y di y(t)
moltiplicando il fasore U per jw
28
Proprietà dell’integrale
• Per l’integrazione si procede
analogamente, dividendo U per jw:
U
Y
jw
N.B. moltiplicare per j equivale a ruotare
un vettore di +/2, mentre dividere per
j equivale a ruotare il vettore di –/2,
mantenendo in entrambi i casi il
modulo costante.
(j = e j/2, 1/j = -j = e -j/2)
• Applicheremo le trasformate ai circuiti
LRI e LDI
29
Applicazione dei fasori
• Circuito a regime con sorgente: vs(t) = Vs cos(wt + s)
• variabili: 6 [i1(t), i2(t), i3(t), v1(t), v2(t), v3(t)]
• Equazioni: 6 [1 I K, 2 II K, 3 costitutive]
- i1 (t ) i2 (t ) i3 (t ) 0
v (t ) - v (t ) 0
3
1
v3 (t ) - v2 (t ) 0
v1 (t ) - R1i1 (t ) vs (t )
i (t ) C dv3 (t )
3
dt
v (t ) R i (t )
2 2
2
30
Applicazione dei fasori (2)
• Essendo il circuito lineare e tempo-invariante
e la sorgente sinusoidale, le correnti e tensioni
sono sinusoidali. Definiamo i fasori associati:
vs (t ) Vs cos(w t s ) Vs Vs e j s
i1 (t ) I1 cos(w t i1 ) I1 I1e ji1
i2 (t ) I 2 cos(w t i 2 ) I 2 I 2 e ji 2
i3 (t ) I 3 cos(w t i 3 ) I 3 I 3e ji 3
v1 (t ) V1 cos(w t v1 ) V1 V1e jv1
v2 (t ) V2 cos(w t v 2 ) V2 V2 e jv 2
v3 (t ) V3 cos(w t v 3 ) V3 V3e jv 3
• Le incognite sono le ampiezze e fasi delle
sinusoidi, ovvero i moduli e le fasi dei fasori
associati
31
Applicazione dei fasori (3)
• Per le proprietà viste, operiamo la
trasformazione delle equazioni con la
trasformata di Steinmetz, utilizzando i fasori
appena introdotti.
• Le equazioni diventano:
- I1 I 2 I 3 0
V1 - V3 0
V - V 0
3 2
V1 - R1 I1 Vs
I C j wV
3
3
V2 R2 I 2
• Sono 6 equazioni complesse in 6 variabili
complesse
• Corrispondono a 12 equazioni reali in 12
variabili reali
32
Applicazione dei fasori (4)
• I fasori delle tensioni risultano essere:
1
R1
V1 V2 V3
Vs
1
1
jw C
R1 R2
R2 Vs
R1 R2 jw C R1 R2
V1
R2 Vs
R1 R2 2 w 2 C 2 R12 R22
v1 s - atan
w C R1 R2
R1 R2
2k
• Nel dominio del tempo si ottiene:
v1 (t )
R2 Vs
R1 R2 w
2
2
C R R
2
2
1
2
2
cos(w t s - atan
w C R1 R2
R1 R2
)
33
Circuiti resistivi e fasori
• Un circuito LRI a regime (sorgenti sinusoidali
isofrequenziali) può essere descritto con il tableau
Ai (t ) 0
Bv (t ) 0
Mv (t ) Ni (t ) h (t )
s
• Per PSE tutte le variabili del circuito sono sinusoidali.
Applicando Steinmetz, per la proprietà della linearità,
si ottiene
A I 0
BV 0
MV NI H
s
• Si risolve il sistema nelle variabili complesse (fasori) e
poi si anti-trasformano i risultati.
34
Circuiti dinamici e fasori
• Un circuito LDI a regime (sorgenti sinusoidali
isofrequenziali) può essere descritto con il
tableau aggiungendo le derivate delle tensioni
sui condensatori e delle correnti nelle
induttanze:
Ai(t ) 0
Bv (t ) 0
Mv (t ) Ni(t ) h s (t )
dv p (t )
i p (t ) C p
dt
v (t ) L diq (t )
q
q
dt
• Per PSE e per la proprietà della derivata dei
fasori, tutte le variabili a regime del circuito
saranno sinusoidali
35
Circuiti dinamici e fasori (2)
• Applicando la trasformata di Steinmetz
alle variabili sinusoidali (i(t), v(t)) del
circuito si ottiene
AI 0
BV 0
MV NI H s
I j wC V
p
p
Vq jwLI q
• Il sistema lineare va risolto nei fasori
(I, V) delle variabili del circuito. Si
può procedere infine alla operazione di
anti-trasformazione per trovare le
funzioni sinusoidali nel dominio del
tempo
36
Elementi dinamici e trasformate
con i fasori
• Trasformando le relazioni costitutive si
ottiene:
I jwCV
dv
i C
1
I
dt V
jwC
V jwLI
di
v L
1
V
dt I
jwL
37
Impedenze e ammettenze
•
Le impedenze (ammettenze) sono definite
come estensione del concetto di resistenza
(conduttanza), ovvero come rapporto dei
fasori della tensione e della corrente di un
bipolo e viceversa
V
z R jX z e j
I
I 1
1 - j
j y
y G jB y e e
V z
z
• z: impedenza
R: resistenza
X: reattanza
• y: ammettenza G: conduttanza
B: suscettanza
38
Bipoli elementari e impedenze
• Con i fasori, applicando le proprietà viste
precedentemente, si ha
R:
V RI
C : I j wC V
L : V jw L I
V
I
R
1
V
I
jw C
1
I
V
j wL
• Da cui si ricavano le relative impedenze e
ammettenze:
z R R,
1
yR G
R
1
zC
,
jwC
z L jwL,
yC jwC
yL
1
jwL
39
Impedenza e ammettenza
con i fasori
• Nel dominio dei fasori, la relazione tra
l’impedenza e l’ammettenza è
1
1
y
z
z
y
y -
R
G
2
2
1
R
X
y
-X
z
B 2
R X2
40
Fase dell’impedenza
• Bipolo resistivo: = 0 (z = R)
• Bipolo capacitivo: = -/2 (z = 1/jwC)
• Bipolo induttivo: = /2 (z = jwL)
• Bipolo resistivo-capacitivo: -/2 < < 0
• Bipolo resistivo-induttivo: 0 < < /2
(Nel semipiano sinistro il bipolo eroga potenza)
41
Fasori e impedenze
• Per una generica impedenza z:
V z I V z I , V I z
V
V
I I
, I V - z
z
z
42
Fasori e impedenze (2)
• Resistenza R:
V R I V R I , V I
• Condensatore C:
1
V
I V
I , V I jw C
wC
2
1
• Induttore L:
V jw L I V w L I , V I
2
43
Fasori e riferimento di fase
• Consideriamo un bipolo in regime sinusoidale e
eseguiamo un cambiamento della coordinata tempo
con un Dt a piacere (sinusoide da - a +
v(t ) V e jwt
i (t ) I e jwt
t t ' Dt
i (t ' ) I e
Ie e
v(t ' ) V e e
D w Dt
i (t ' ) I e e
v(t ' ) V ' e
V ' Ve
I ' Ie
i (t ' ) I ' e
v(t ' ) V e jw ( t ' Dt ) V e jwDt e jwt '
jw ( t ' Dt )
jwDt
jD
jD
jD
jD
jwt '
jwt '
jw t '
jwt '
jwt '
44
Fasori e riferimento di fase (2)
• I moduli dei fasori calcolati nei due
riferimenti sono uguali, mentre le fasi sono
traslate dello stesso angolo D
• Questa traslazione di fase si manifesta in tutti
i fasori del circuito.
V ' V e jD
I ' Ie
jD
V ' V , V ' V D
I ' I , I ' I D
V V'
z V - I V '-I ' z
I
I'
45
Serie di bipoli
• Due bipoli sono connessi in serie quando
sono percorsi dalla stessa corrente (le loro
tensioni si sommano)
• v = v1 + v2 , i = i 1 = i 2
• v1 = R1 i1, v2 = R2 i2,
• v = R1 i + R2 i = (R1 + R2) i = Rs i
Rs = R1 + R2
• L’espressione sopra si estende a un numero n
di resistori (resistenze)
• Nel caso di due soli componenti
• 1/Gs = 1/G1 + 1/G2 = (G1 + G2)/G1G2
G1G2
Gs
G1 G2
• NB: R --- cc R, R --- ca ca
• NB: R --- R ---… --- R nR
46
Parallelo di bipoli
• Due bipoli sono connessi in parallelo quando
sono sottoposti alla stessa tensione (le loro
correnti si sommano)
• i = i 1 + i 2 , v = v1 = v2
• i1 = G1 v1, i2 = G2 v2,
• i = G1 v + G2 v = (G1 + G2) v = Gp v
Gp = G1 + G2
• L’espressione sopra si estende a un numero n
di resistori (conduttanze)
• Nel caso di due soli componenti
• 1/Rp = 1/R1 + 1/R2 = (R1 + R2)/R1R2
R1 R2
Rp
R1 R2
• NB: la Rp sarà sempre più piccola delle
resistenze R1 e R2
• NB: R//cc cc, R//ca R
• NB: R//R//…//R R/n
47
Partitori di tensione
Si può applicare
quando ho due o più
(N) bipoli in serie
v v1 v2 , i i1 i2
v1 R1i, v2 R2i, v ( R1 R2 )i
R1
R2
v1
v , v2
v
R1 R2
R1 R2
Rk
vk
v
R1 R2 RN
48
Partitori di tensione (2)
• Se ho solo 2 bipoli in serie, posso usare
le ammettenze
1 / G1
G2
v1
v
v
1 / G1 1 / G2
G1 G2
G1
v2
v
G1 G2
• N.B. i componenti devono essere
percorsi dalla stessa corrente perché la
regola del partitore sia applicabile
49
Partitori di corrente
Si può applicare
quando ho due o più
(N) bipoli in parallelo
i i1 i2 , v v1 v2
i1 G1v, i2 G2 v, i (G1 G2 )v
G1
G2
i1
i, i2
i
G1 G2
G1 G2
Gk
ik
i
G1 G2 GN
50
Partitori di corrente (2)
• Con due bipoli in parallelo, posso usare
le resistenze
1 / R1
R2
i1
i
i
1 / R1 1 / R2
R1 R2
R1
i2
i
R1 R2
• N.B. Scorre più corrente nel ramo con
resistenza minore (vedi sistemi di terra)
51
Bipoli dinamici notevoli
• Consideriamo la serie di una resistenza e di
un condensatore (R, C > 0)
1
1
z R
R- j
j wC
wC
52
Bipoli dinamici notevoli (2)
• Consideriamo il parallelo di una resistenza e
di un condensatore (R, C > 0)
1
R
R
j wC
z
1
1 jwCR
R
j wC
R
- wCR 2
j
2 2 2
1w C R
1 w 2C 2 R 2
53
Bipoli dinamici notevoli (3)
• Consideriamo la serie di una resistenza e di
un induttore (R, L > 0)
z R j wL
54
Bipoli dinamici notevoli (4)
• Consideriamo il parallelo di una resistenza e
di un induttore (R, L > 0)
R jwL
z
R jw L
Rw 2 L2
wLR 2
2
j 2
2 2
R w L
R w 2 L2
55
Circuiti risonanti reali serie
• Consideriamo la serie di una resistenza, di un
induttore e di un condensatore (R, L, C > 0)
1
1
z R j wL
R j wL
j wC
wC
• La reattanza si annulla in w0, frequenza di
risonanza
1
1
0 w0
wC
LC
X s 0 per w w0 (comportamento res - ind)
X s wL -
X s 0 per w w0 (comportamento res - cap)
56
Circuiti risonanti serie reali (2)
• In w0 abbiamo il minimo dell’impedenza (z =
R), il cui modulo tende all’infinito per w 0
e per w
• Se alimentiamo il circuito risonante con una
sorgente di tensione sinusoidale costante in
ampiezza, otteniamo il massimo della
corrente alla frequenza di risonanza
• È il più semplice filtro passa-banda
57
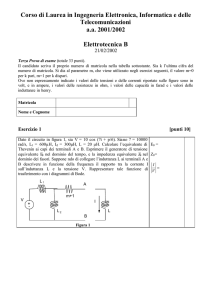
Circuiti risonanti serie reali (3)
• Rappresentazione grafica dei fasori relativi a un
circuito risonante serie reale, dove la corrente è:
i(t) = |I| cos(wt + i) A
• Conta lo sfasamento relativo tra tensione e corrente
(angolo ), non il valore assoluto della fase che
dipende dall’origine (arbitraria) dell’asse temporale
58
Circuiti risonanti serie reali (4)
• Alimentiamo il bipolo con una sorgente di tensione
sinusoidale con fasore Vs e calcoliamo la ddp sulla
resistenza in rapporto alla tensione di alimentazione
VR
R
VS
R j wL
1
1
j wC
1
1
j
1
w
L
R
wC
j L
1
1
w LC
R C
w LC
1
H ( jw )
w w0
1 jQ
w
w0
w0 L
1
L
1
con : w0
,Q
R
w0CR
LC
R C
• w0: frequenza di risonanza
• Q: fattore di qualità
59
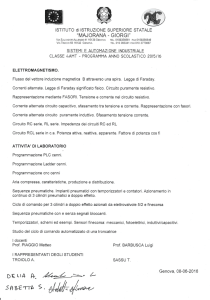
Circuiti risonanti serie reali (5)
• Disegniamo i diagrammi del modulo e della
fase
60
Circuiti risonanti parallelo reali
• Sono equivalenti a quelli serie. Invece della
impedenza, calcoleremo l’ammettenza (si
scambiano tra loro tensioni e correnti)
61