- 133 -
9 CAPITOLO IX
9.1 Elementi di ottica di Fourier
Abbiamo già introdotto nel Capitolo VI alcuni concetti sulle trasformate di Fourier e sul loro
utilizzo in ottica. Vogliamo ora cercare di vedere come l’analisi di Fourier permette di trattare i
processi ottici in termini di frequenze spaziali. La motivazione principale è quella di cercare di
capire come i sistemi ottici processano la luce per formare le immagini, e sapere l’ampiezza e
la fase del fronte d’onda che le formano.
Per prima cosa ricordiamo che una funzione generica f(x) può essere espressa come
combinazione lineare di un numero infinito di armoniche:
f ( x) =
1
A(k ) cos k xd k + B(k ) sin k xd k
0
(9.1)
0
I fattori che determinano l’importanza dei contributi delle diverse frequenze spaziali k, sono
A(k) e B(k), che sono dati dalla:
A(k ) =
B (k ) =
+
f ( x ') cos k x ' dx '
(9.2)
+
f ( x ') sin k x ' dx '
Passando alla notazione complessa esponenziale si può arrivare a scrivere (lo studente provi a
fare i vari passaggi o li cerchi nei libri citati in bibliografia):
f ( x) =
1
2
+
F (k )e
ik x
dk
(9.3)
se si ha che:
F (k ) =
+
f ( x)eik x dx
(9.4)
La funzione F(k) è la trasformata di Fourier della f(x), che simbolicamente si scrive:
F (k ) = F{ f ( x)}
(9.5)
In letteratura si trovano diversi modi di definire la trasformata di Fourier, per cui bisogna stare
attenti alla notazione utilizzata.
Si noti che A(k) e B(k) sono rispettivamente la parte reale e la parte immaginaria della
F(k), cioè:
F (k ) = A(k ) + iB(k )
(9.6)
La F(k) essendo una quantità complessa può essere scritta in termini di un’ampiezza reale
F (k ) , detta spettro di ampiezza, e di un termine reale di fase (k), detto spettro di fase:
- 134 F ( k ) = F ( k ) ei
(k )
(9.7)
La f(x) è detta trasformata inversa di F(k), o simbolicamente:
f ( x) = F -1{F (k )} = F -1{F{ f ( x)}}
(9.8)
Ovviamente se f fosse una funzione del tempo t anziché dello spazio x, sarebbe sufficiente
sostituire t ad x, e (frequenza angolare temporale) a k (frequenza angolare spaziale).
9.1.1 Trasformata di una funzione gaussiana
Come esempio del metodo esaminiamo la funzione di Gauss:
f ( x) = Ce
dove C
a/
(9.9)
e a è una costante. La sua trasformata di Fourier si ottiene dalla:
F (k ) =
L’esponente
ax 2
+
(Ce
ax 2 + ik x si può riscrivere come
x a ik / 2 a =
ax 2
)eik x dx
(9.10)
( x a ik / 2 a )2 k 2 / 4a , e assumendo
si ha:
F (k ) =
L’integrale definito è uguale a
C
e
a
k 2 / 4a
+
e
2
dx
(9.11)
, per cui è
F (k ) = e
k 2 / 4a
(9.12)
che è ancora una gaussiana, questa volta con k come variabile. Le deviazioni standard sono nei
due casi x = 1/ 2a e k = 1/ 2a per cui è x k = 1 .
9.1.2 La trasformata bidimensionale
L’ottica coinvolge generalmente segnali bidimensionali, come ad esempio il campo
elettromagnetico attraverso un’apertura o la distribuzione della densità di flusso sul piano delle
immagini. Per questo motivo dobbiamo generalizzare la trasformata di Fourier al caso
bidimensionale. Questa si esprime attraverso la seguente equazione:
f ( x, y ) =
+ +
1
(2 )
2
F (k x , k y )e
i (k x x +k y y )
d kxd k y
(9.13)
e
F (k x , k y ) =
+ +
f ( x, y )e
i (k x x +k y y )
dxdy
(9.14)
- 135 Le quantità kx e ky sono le frequenze angolari spaziali lungo i due assi. L’estensione al caso
tridimensionale è quindi evidente. In generale una perturbazione può essere sintetizzata da una
combinazione lineare di onde piane aventi diverso numero di propagazione e diverse direzioni
[ i ( k x + k y + k z )]
di propagazione. Infatti nel caso 3D le funzioni elementari sono del tipo e x y z , cioè
e ik r che sono onde piane. Pertanto anche in 2D le funzioni elementari sono “orientate” in
direzioni diverse. Questo significa che per un dato insieme di valori di kx e ky , gli esponenti o
la fase delle funzioni elementari saranno costanti lungo delle linee:
k x x + k y y = costante = A
L’orientazione delle linee di fase costante è quindi
= tan
ky
1
kx
= tan
1
x
y
dove k x = 2 / x (e analoga per ky). La lunghezza d’onda, o periodo spaziale
lungo k è data dalla
1
=
2
x
+
e quindi
2
, misurata
k = k x2 + k y2
y
Tutto questo significa che per costruire una funzione 2D oltre ai termini armonici kx e ky, si
dovranno includere termini che sono orientati in direzioni diverse dalle direzioni x e y. Un
modo per visualizzare la cosa, ad esempio il fronte emergente da una fenditura, è quello di
pensare al nuovo fronte come ad una sovrapposizione di onde piane che emergono dalla
fenditura in tutte le direzioni. Queste sono le componenti di Fourier che vanno in tutte le
direzioni con specifici valori della frequenza angolare. Il termine con frequenza angolare nulla
corrisponde all’onda non deviata, mentre le frequenze angolari più alte formano un angolo
maggiore con l’asse ottico.
9.1.3 Proprietà della Delta di Dirac
Molti fenomeni fisici sono di tipo impulsivo (sia spaziale che temporale), ed è utile sapere
come risponde un sistema a questo tipo di stimolo. L’idealizzazione matematica di questo tipo
di stimolo si realizza tramite l’uso della funzione (x) di Dirac. Essa è definita dalla:
( x) =
0 x 0
x=0
e dalla:
+
( x)dx = 1
Le applicazioni più importanti per l’uso della (x) di Dirac derivano dalla seguente proprietà,
detta proprietà di “sifting” (letteralmente setacciatura); l’integrale di una funzione generica f(x)
moltiplicata per la (x), dato dalla:
- 136 +
( x) f ( x)dx = f (0)
(9.15)
è uguale al valore della funzione f nel punto x=0. Allo stesso modo definendo una (x-x0)
tramite la:
( x x0 ) =
0 x x0
x = x0
si può vedere che
+
( x x0 ) f ( x)dx = f ( x0 )
estrae proprio il valore della f per x=x0. Ricordando la (9.3) una generica funzione f(x) può
scriversi:
f ( x) =
+
1
2
+
e
ik ( x x ')
+
d k f ( x ')dx ' =
( x x ') f ( x ')dx '
da cui:
( x x ') =
1
2
+
e
ik ( x x ')
dk
(9.16)
Evidentemente per x’=0
( x) =
1
2
+
e
ik x
dk =
1
2
+
e ik x d k
Questo implica che la funzione (x) di Dirac può essere vista come la trasformata di Fourier
inversa di 1, cioè ( x) = F 1{1} e quindi F { ( x)} = 1 . Possiamo immaginare un impulso
quadrato che via via diviene più stretto ed alto; per una larghezza infinitesima la sua
trasformata sarà di estensione infinita, o in altre parole, una costante. Se l’impulso si trova in
una posizione x=x0, la sua trasformata cambia fase ma non ampiezza, e si ha:
F { ( x x0 )} = eik x
0
(9.17)
In generale si può dimostrare che la trasformata di Fourier di una funzione che viene spostata
nello spazio (o nel tempo) è la trasformata della funzione non spostata per un termine
esponenziale che è lineare nella fase. Questa proprietà è particolarmente utile quando andiamo
a prendere in considerazione l’immagine di diverse sorgenti puntiformi identiche ma separate.
Vediamo ad esempio una f(x) data dalla somma di tanti impulsi separati:
f ( x) =
(x x j )
j
la sua trasformata sarà data da:
- 137 -
F { f ( x)} =
e
ik x j
j
In particolare se ci sono solo due funzioni , una a x0=d/2 e l’altra a x0=−d/2, si ottiene:
f ( x) = [ x (+ d / 2)] + [ x ( d / 2)]
e quindi
F { f ( x)} = eik d / 2 + e
ik d / 2
= 2 cos(k d / 2)
che mostra come la trasformata di due funzioni sia una funzione coseno e viceversa. Questo
dovrebbe far ricordare l’esperimento di Young, e in particolare la (7.22). Se la fase di una delle
due funzioni è spostata si ha invece:
F { f ( x)} = eik d / 2 + e
ik d / 2
= 2i sin(k d / 2)
Si ricordi che ci sono due modi alternativi per considerare la trasformata complessa, sia come
somma di parte reale e immaginaria (eq. 9.6), sia come prodotto di un termine di ampiezza e
uno di fase (eq. 9.7). Si capisce dal risultato precedentemente ottenuto che le funzioni coseno e
seno sono funzioni speciali: il primo è associato ai contributi puramente reali, il secondo a
quelli puramente immaginari. Molte funzioni, anche armoniche, sono la combinazione di parte
reale e immaginaria. Per esempio, una funzione coseno spostata in ascissa, non è più né pari né
dispari, e ha quindi una parte reale e immaginaria. Si noti che quando la funzione coseno è
spostata di /4 (quindi in una funzione seno), la differenza di fase tra le due funzioni è
radianti.
9.1.4 I sistemi lineari
Un concetto importante nell’ottica di Fourier è quello di sistema lineare. Supponiamo che un
segnale in ingresso in un sistema sia rappresentato da una funzione f(y,z), e in uscita sia dato da
una funzione g(Y,Z). Il sistema è lineare se:
1. moltiplicando la f(y,z) per una costante a si ha un output ag(Y,Z);
2. quando l’input è del tipo af1+bf2 l’output è ag1+bg2.
Inoltre il sistema lineare sarà invariante spazialmente se è stazionario, cioè cambiando la
posizione dell’input cambia la posizione dell’output, ma non muta la sua forma.
L’idea dietro a queste considerazioni è che l’output prodotto da un sistema ottico può essere
trattato come la sovrapposizione lineare degli output di ogni singolo punto dell’oggetto.
Simbolicamente possiamo scrivere:
g (Y , Z ) = L{ f ( y, z )}
e, usando la proprietà di “sifting”,
g (Y , Z ) = L
+ +
f ( y ', z ') ( y ' y ) ( z ' z )dy ' dz '
Ne segue che per la seconda condizione di linearità può anche scriversi:
(9.18)
- 138 -
g (Y , Z ) =
+ +
f ( y ', z ')L{ ( y ' y ) ( z ' z )}dy ' dz '
(9.19)
La quantità L{ ( y ' y ) ( z ' z )} è la risposta del sistema ad una funzione localizzata nel
punto (y’,z’) nello spazio oggetto, ed è detta risposta all’impulso.
Apparentemente, se la risposta all’impulso di un sistema è nota, l’output può essere calcolato
direttamente dalla (9.19). Se le sorgenti elementari sono coerenti, i segnali di input e di output
saranno campi elettrici, se incoerenti saranno densità di flusso.
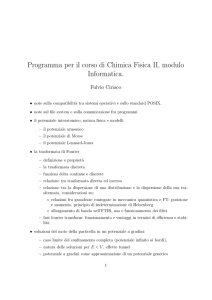
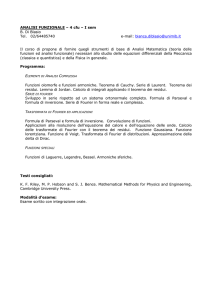
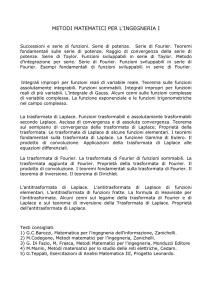
Si consideri ad esempio la Fig. 9.1.
Y
y
piano oggetto
Z
piano immagine
Fig. 9.1 Una lente forma un’immagine.
Una sorgente luminosa incoerente nel piano oggetto (y,z) può essere pensata come la somma di
un numero enorme di sorgenti infinitesime (il quadratino nero in figura). Ognuna di esse
produce uno spot luminoso sul piano focale della lente. Assumiamo che l’ingrandimento sia
unitario. Si noti che se l’ingrandimento fosse maggiore di 1, l’immagine apparirebbe più
grande dell’oggetto e di conseguenza tutti i dettagli spaziali sarebbero più grandi, e le
frequenze che compongono l’immagine meno elevate.
Se I0(y,z) è la densità di flusso sul piano oggetto di un elemento dydz localizzato in (y,z),
esso emetterà un flusso I0(y,z) dydz. A causa della diffrazione (e delle aberrazioni) la luce è
sbrodolata su di uno spot luminoso, piuttosto che focalizzata in un punto. La densità di flusso
che arriva nell’elemento i-esimo (Y,Z) sarà:
dI i (Y , Z ) = S ( y, z; Y , Z ) I 0 ( y, z )dydz
La funzione S prende il nome di Point Spread Function (PSF). A causa dell’incoerenza della
sorgente il contributo di ogni sorgente infinitesima sarà additivo e quindi
- 139 -
I i (Y , Z ) =
+
+
I 0 ( y, z ) S ( y, z; Y , Z )dydz
(9.20)
Se la lente fosse perfetta, cioè non avesse aberrazioni, e fossimo limitati solo dalla diffrazione,
la funzione S corrisponderebbe alla figura di diffrazione di un punto localizzato in (y,z).
Evidentemente se diciamo che l’input è una funzione centrata in un punto (y0, z0), allora
I 0 ( y, z ) = A ( y y0 ) ( z z0 ) , dove A è una costante che porta con se le unità di misura.
Pertanto si ha:
I i (Y , Z ) = A
+
+
(y
y0 ) ( z z0 ) S ( y, z; Y , Z )dydz
(9.21)
e per la proprietà di “sifting”
I i (Y , Z ) = AS ( y0 , z0 ; Y , Z )
la PSF ha una forma funzionale identica a quella di un’immagine generata da un impulso . In
un sistema corretto dalle aberrazioni, la PSF coincide con il disco di Airy. Se il sistema è
invariante spazialmente il punto oggetto in input può essere mosso a piacere senza alcuna
variazione nella sua immagine, se non nella posizione. Si può dire anche che la PSF è la stessa
per ogni punto (y,z). In pratica questo non accade mai completamente e la PSF varia anche se
di poco.
Se abbiamo a che fare con luce coerente, invece che incoerente, dobbiamo di nuovo
considerare un insieme di impulsi , ma questa volta ognuno di essi rappresenta l’ampiezza del
campo elettrico. Di nuovo il sistema sarà descritto da una PSF, sebbene questa volta sia una
PSF d’ampiezza. Per un’apertura circolare limitata dalla diffrazione, la PSF sarà la figura di
diffrazione medesima. Infine occorre considerare l’interferenza che si ha sul piano immagine
tra le varie sorgenti coerenti che interagiscono. Al contrario per sorgenti incoerenti, l’unico
processo che avviene sul piano immagine è la somma dei vari contributi di flusso.
9.1.5 L’integrale di convoluzione
L’integrale 2D dell’eq. (9.21) è un integrale che va sotto il nome di convoluzione. In una
dimensione la convoluzione di una generica funzione f con una funzione di impulso h, si
scrive:
g(X ) =
+
f ( x ) h( X
x)dx
Non trattiamo qui l’aspetto matematico di questa operazione, ma citiamo solo alcune proprietà
utili per la nostra trattazione. Lo studente che vuole approfondire consulti i libri citati nella
bibliografia.
Supponiamo di avere due funzioni f(x) e h(x) le cui trasformate di Fourier siano
rispettivamente F (k ) = F{ f ( x)} e H (k ) = F{h( x)} . Per il teorema di convoluzione si ha:
F {g} = F { f
h} = F { f } F (h}
o anche
G (k ) = F (k ) H ( k )
dove G (k ) = F{g} .
(9.22)
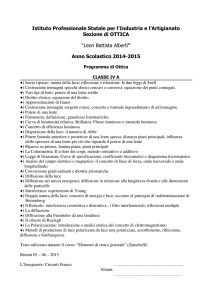
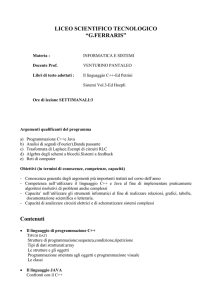
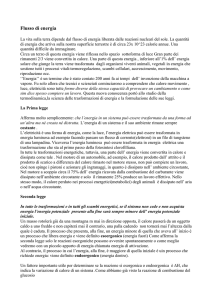
- 140 Come esempio consideriamo la convoluzione di due impulsi rettangolari il cui risultato è un
impulso triangolare (vedi Fig. 9.2). Si vede che il semplice prodotto delle trasformate è la
trasformata della funzione g.
Nello spazio k l’analoga della (9.22) è il teorema di convoluzione in frequenza, dato dalla:
1
F { f } F {h}
2
cioè la trasformata del prodotto è la convoluzione delle trasformate.
F { f h} =
x
f
1
h
1
1
d
d
d sinc(u)
(9.23)
g
2d
d sinc(u)
d2 sinc2(u)
×
Fig. 9.2 Esempio di uso del teorema di convoluzione. u = (kd/2)
Consideriamo ora la trasformazione di un pacchetto d’onda gaussiano. In generale, essendo
un’onda armonica mono-dimensionale del tipo:
E% ( x, t ) = E0e
i ( k0 x
t)
è sufficiente modulare in qualche modo l’ampiezza per ottenere l’impulso che si desidera.
Assumendo ad esempio un profilo d’onda indipendente dal tempo,
E% ( x, 0) = f ( x)e
il problema è quello di determinare la F { f ( x)e
+
ik0 x
f ( x )e
ik0 x
} . A tale scopo calcoliamo l’integrale
ik0 x ikx
e dx
(9.24)
Ponendo k ' = k k0 si ha:
F (k ') =
+
f ( x)eik ' x dx = F (k k0 )
In altre parole, se F (k ) = F { f ( x)} allora F (k k0 ) = F { f ( x)e
inviluppo gaussiano del tipo f ( x) = a / e
ax 2
si ha quindi:
ik0 x
(9.25)
} . Per il caso specifico di un
- 141 E% ( x, 0) = a / e
ax 2
e
ik0 x
e dalla discussione precedente e dalla (9.12) si ha quindi:
F {E% ( x, 0)} = e
( k k0 ) 2 / 4 a
(9.26)
Il risultato è quindi ancora una gaussiana centrata in k0.
9.2 Le lenti realizzano le trasformate di Fourier
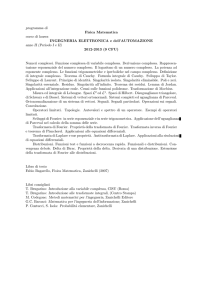
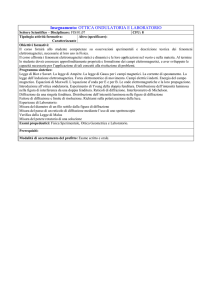
La Fig. 9.3 mostra un fronte d’onda piano parallelo che incide su di una fenditura, e una lente
localizzata a distanza f da essa, che produce un fascio parallelo di raggi che a due a due
convergono nel piano focale della lente medesima, per poi proseguire e formare l’immagine
dell’oggetto nel piano coniugato a 0. Il piano t è detto piano delle trasformate, ed in esso
vediamo la figura di diffrazione (alla Fraunhofer) prodotta dalla fenditura. In altre parole si
dice che la funzione di apertura, cioè la distribuzione del campo elettrico sul piano della
fenditura (che in questo caso coincide con il piano focale oggetto della lente), è trasformata
dalla lente nella figura di diffrazione. In realtà questo è vero solo in parte, poiché la lente non
forma l’immagine su di un piano (si ricordino le aberrazioni).
E’importante notare che il campo di diffrazione di Fraunhofer corrisponde esattamente alla
trasformata della funzione di apertura. Nel caso esaminato la fenditura è nel piano focale
oggetto della lente e tutti i raggi diffratti mantengono la stessa fase durante il percorso
(cammino ottico) fino al piano delle trasformate. Questo non accade quando l’oggetto non è nel
piano focale oggetto della lente. Ci sarà allora una deviazione di fase, ma con nessuna
conseguenza, perché noi andiamo ad osservare la densità di flusso, in cui l’informazione sulla
fase è mediata, e le distorsioni di fase sono quindi inosservabili.
Nelle nostre esperienze di laboratorio andremo a vedere tramite nell’esperienza di “Abbe”
come si comportano le lenti come trasformatori di Fourier per vari tipi di oggetto.
t
0
i
f
f
Fig. 9.3 La luce diffratta da una fenditura nel piano focale oggetto 0 di una lente converge a formare la figura di
diffrazione nel piano focale t della lente (o paino delle trasformate), per poi proseguire e formare l’immagine
dell’oggetto nel piano i.
- 142 Nella Fig. 9.3 i è il piano dell’immagine, cioè il piano coniugato al piano oggetto. Si vede che
l’immagine è capovolta e ingrandita.
La lente forma quindi due configurazioni di interesse: la prima è la trasformata di Fourier sul
piano focale della lente, l’altra è l’immagine dell’oggetto sul piano coniugato al piano oggetto.
Possiamo pensare al piano focale della lente come ad un insieme di sorgenti secondarie,
secondo il principio di Huygens-Fresnel. Si capisce quindi come l’immagine della fenditura sia
il risultato di un doppio processo di diffrazione; la prima produce la ben nota configurazione di
diffrazione, mentre la seconda ricostruisce l’immagine. Se non ci fosse la lente non si potrebbe
vedere l’immagine della fenditura, e si vedrebbe solo la configurazione di diffrazione. Questo
modo di vedere il processo di formazione dell’immagine è stato per la prima volta proposto da
Abbe nel 1873. Naturalmente al posto della fenditura singola si può usare un reticolo. Si
osservi inoltre che se la lente non è grande abbastanza da prendere tutta la luce diffratta dalla
fenditura, l’immagine che si forma non è più corrispondente perfettamente all’originale. Poiché
sono le alte frequenze ad essere lontane dall’asse ottico, la perdita di queste provoca una
mancanza di definizione e di risoluzione dell’immagine. Si può dire che, a meno che la lente
non abbia un’apertura infinita, essa si comporta come un filtro che lascia passare
preferibilmente le basse frequenze.
Se si usa un reticolo, nel piano t si vedrà la trasformata di Fourier del reticolo, ed essendo
di dimensioni finite e quindi non periodico, la trasformata sarà dominata da alcune componenti
discrete (le armoniche principali), mentre le armoniche secondarie saranno via via più deboli.
La trasformata avrà quindi una ben precisa configurazione. Se invece l’oggetto è più
complicato, al limite continuo, occorreranno infinite armoniche per riprodurlo, e quindi
l’immagine della trasformata sarà molto più complessa.
Si consideri allora la costruzione di Fig. 9.4. Un piano oggetto 0 è posto ora ad una distanza
qualsiasi da una lente Lt, e una seconda lente Li è posta ad una distanza opportuna in modo da
produrre sul piano i l’immagine dell’oggetto.
0
Lt
t
Li
i
Fig. 9.4 Le lenti e i piani oggetto, trasformata ed immagine.
Il piano t è il piano della trasformata della prima lente. Si vede come la lente Li posta con t
alla distanza focale f, produca l’immagine, cioè esegua l’anti-trasformata di Fourier. Muovendo
0 si cambia la distribuzione di fase e di ampiezza, ma non cambia sostanzialmente il
fenomeno.
- 143 Se una mascherina o un filtro è posto nel piano t, oscurando alcune frequenze spaziali, si
impedisce loro di raggiungere il piano immagine, realizzando quindi un filtraggio spaziale. In
generale si vede che le frequenze spaziali elevate contribuiscono a definire i bordi netti delle
immagini, dove si passa rapidamente da una zona illuminata al buio. Rimovendo queste
frequenze, ad esempio con un filtraggio, la nuova immagine risulta più arrotondata e perde di
definizione e di risoluzione.
9.3 La diffrazione di Fraunhofer
La teoria delle trasformate di Fourier porta ad una interessante interpretazione del fenomeno
della diffrazione alla Fraunhofer. Nel capitolo precedente abbiamo visto che per effetto della
diffrazione da un’apertura generica, su cui incide un’onda piana monocromatica, il campo nel
piano immagine (Y,Z) è dato da una eq. del tipo:
E (Y , Z ) =
A
ei ( t
R
kR )
eik (Yy
Zz ) / R
dydz
(9.27)
apertura
dove la quantità R è la distanza dal centro dell’apertura al punto (Y,Z) ed A è la forza
dell’oscillatore per unità di area. Il termine esponenziale che include il tempo t è invece legato
alla fase della perturbazione nel punto (Y,Z). Si vede che l’ampiezza varia con l’inverso della
distanza. Il termine di fase non ha molta importanza in questo contesto poiché noi siamo
interessati alla distribuzione relativa di ampiezza. Pertanto se ci limitiamo ad una piccola
porzione di spazio in cui R è praticamente costante, il termine davanti all’integrale può essere
pensato in prima approssimazione come una costante. L’unico termine che non è corretto dire
sia una costante è A, se ad esempio l’apertura non è perfetta ma vi si posano sopra granelli di
polvere o altre imperfezioni, il campo che si emana da ogni singolo elemento d’area può essere
diverso in ampiezza e fase. Le variazioni di A possono essere conglobate in un unico termine
del tipo:
A( y, z ) = A0 ( y, z )ei
( y,z )
(9.28)
che chiamiamo funzione di apertura. Con questa variazione la (9.27) può scriversi:
E (Y , Z ) =
+
+
A( y, z )eik (Yy + Zz ) / R dydz
(9.29)
I limiti di integrazione possono essere estesi all’infinito perché la funzione di apertura è zero al
di fuori dell’apertura.
Può essere utile a questo punto pensare al contributo infinitesimo dE(Y,Z) nel punto P
come ad un’onda piana che si propaga nella direzione k, ed avente ampiezza A( y, z )dydz . Per
rafforzare ora la somiglianza tra la (9.14) e la (9.29), definiamo le frequenze spaziali:
kY
kZ
kY / R = k sin = k cos
kZ / R = k sin = k cos
(9.30)
Per ogni punto nel piano immagine c’è quindi una corrispondente frequenza spaziale. Il campo
di diffrazione può quindi essere scritto:
- 144 E (kY , k Z ) =
+
+
A( y, z )ei ( kY y + k Z z ) dydz
(9.31)
siamo quindi al punto cruciale: la distribuzione del campo nella diffrazione di Fraunhofer è la
trasformata di Fourier della funzione di apertura, simbolicamente scriveremo:
E (kY , k Z ) = F { A( y, z )}
(9.32)
La distribuzione del campo elettrico nel piano immagine è lo spettro di frequenze spaziali della
funzione di apertura. La trasformata inversa è quindi la funzione di apertura medesima, cioè:
A( y, z ) =
1
2
+
+
E ( kY , k Z ) e
i ( kY y + k Z z )
d kY d k Z
(9.33)
o simbolicamente:
A( y, z ) = F -1 {E (kY , k Z )}
(9.34)
Come abbiamo già detto più è localizzato il segnale, più è distribuito su di un’area vasta la sua
trasformata. Più piccola è l’apertura più larga è la figura di diffrazione.
9.4 Le funzioni di trasferimento
Fino a tempi recenti il modo tradizionale di determinare la qualità di un sistema ottico è stato
quello di valutare i suoi limiti di risoluzione. Migliore la risoluzione, migliore si pensava fosse
il sistema nel suo complesso. Supponiamo allora di osservare con un sistema ottico un insieme
di linee di spessore via via decrescente. Come abbiamo visto prima, anche per un sistema ottico
perfetto, vi è un limite imposto dalla diffrazione, oltre il quale non sarà più possibile
distinguere una linea. Possiamo pensare a questo limite come ad un taglio nel campo delle
frequenze che producono l’immagine. Un analogia che mette in risalto il limite di questo
approccio al problema, è per esempio quello di pensare di valutare l’alta fedeltà di un sistema
sonoro sulla base di un suo limite nel campo delle frequenze. La limitazione di questo schema
diviene evidente quando si introduce un detector dopo il sistema ottico (o sonoro). Avendo
questi in generale una loro sensibilità e risoluzione, sembra ragionevole pensare che il sistema
ottico da associare ad esso non debba avere necessariamente avere prestazioni eccezionali, se
poi il detector che usiamo non è in grado di rilevarle. Il nostro orecchio ad esempio è sensibile
in un certo intervallo di frequenze, per cui non è necessario possedere un impianto sonoro in
grado di emettere onde di altissima frequenza, dato che noi non le sentiremmo.
Fino ad ora abbiamo già rappresentato un oggetto come un insieme di punti sorgente,
ognuno dei quali è trasformato dal sistema ottico in una PSF, e quindi per convoluzione
nell’immagine completa. Adesso affrontiamo il problema dell’analisi dell’immagine da un
punto di vista diverso. Consideriamo l’oggetto come la sorgente di un impulso luminoso che è
esso stesso fatto di onde piane, che viaggiano lungo le direzioni date dalla (9.30), e quindi
corrispondenti a determinate frequenze spaziali. La domanda che ci si pone è quindi: come il
sistema modifica l’ampiezza e la fase di ogni onda piana nell’attraversamento del sistema
dall’oggetto all’immagine?
Un parametro utile a questo proposito è il contrasto o modulazione, definito dalla:
Modulazione
I max I min
I max + I min
(9.35)
- 145 Definiamo quindi il rapporto tra il contrasto dell’oggetto e il contrasto dell’immagine a tutte le
frequenze spaziali come “Modulation Transfer Function” (MTF).
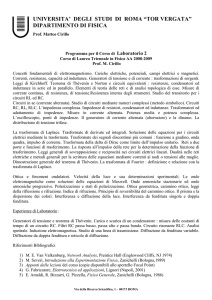
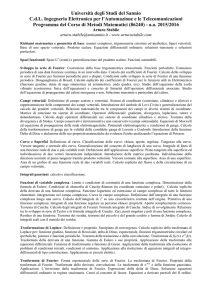
In Fig. 9.5 sono graficate le MTF di due ipotetiche lenti in funzione della frequenza spaziale di
un ipotetico detector. Entrambe valgono 1 in corrispondenza di una frequenza nulla e diventano
nulle ad una data frequenza, ove non sono più in grado di risolvere l’oggetto. Se fossimo
limitati solo dalla diffrazione queste frequenze di taglio dipenderebbero solo dall’apertura delle
lenti. Supponiamo ora di dover accoppiare una delle due lenti ad un detector che non è in grado
di percepire frequenze oltre una certa soglia (linea tratteggiata in figura).
MTF
2
limite del detector
1
frequenza spaziale
Fig. 9.5 Il contrasto di due lenti in ordinata e la frequenza di un ipotetico detector in ascissa.
A dispetto del fatto che la lente N. 1 ha una frequenza di taglio maggiore della N. 2 si vede che
la lente N. 2 è in grado di fornire migliori prestazioni della N. 1, fino al limite di frequenza del
detector.
Se l’input di un sistema è fatto ad esempio da una rete, cioè da una serie di impulsi
quadrati, il contrasto nell’immagine è dovuto alla sovrapposizione del contrasto delle singole
componenti di Fourier che compongono l’oggetto. Un punto importante da sottolineare è che
gli elementi di un sistema ottico funzionano come operatori lineari che trasformano i vari
impulsi sinusoidali in input in altrettanti impulsi sinusoidali in output. Tuttavia la distribuzione
della densità di flusso non sarà identica in input e in output. Ad esempio l’ingrandimento altera
le frequenze spaziali di output, la diffrazione e le aberrazioni riducono l’ampiezza delle
sinusoidi (contrasto), e infine, le aberrazioni fuori asse ed il non perfetto centraggio delle
ottiche, producono uno spostamento (shift) nella posizione della sinusoide di output
corrispondente all’introduzione di una variazione di fase. Indipendentemente dalla simmetria
della PSF se l’oggetto è armonico l’immagine è armonica. Pertanto se pensiamo ad un oggetto
come composto da una serie di armoniche di Fourier, ognuna di esse è trasformata dal sistema
ottico in un output armonico, e l’immagine è data dalla serie di queste armoniche, che come
abbiamo detto cambiano rispetto all’input in ampiezza e fase. La funzione che descrive come la
singola armonica cambia nell’attraversare il sistema si chiama “Optical Transfer Function”
(OTF). Essa è una quantità complessa dipendente dalla frequenza spaziale il cui modulo è la
MTF e la cui fase è la “Phase Transfer Function” (PTF). La prima è una misura della riduzione
in contrasto tra l’oggetto e l’immagine su tutto lo spettro, la seconda rappresenta la fase
relativa. Differenze di fase nei sistemi ottici si hanno però solo fuori asse, e quindi la PTF è
spesso meno importante della MTF. Tuttavia ci sono casi in cui la PTF ha un ruolo cruciale.
In generale possiamo dire che la MTF è oggi molto usata per specificare le proprietà di tutti
i tipi di sistemi ottici (e non), dalle lenti, ai nastri magnetici, alle pellicole, ai telescopi,
- 146 all’atmosfera, all’occhio, e così via. Essa ha il vantaggio che se tutte le singole MTF delle
componenti di un sistema sono note, la MTF del sistema nel suo complesso è semplicemente il
prodotto di tutte le singole MTF. Le lenti però fanno eccezione, poiché le aberrazioni di una
lente possono essere corrette da quelle di un altra, esse non sono indipendenti, e non si può
applicare quanto detto prima.
9.4.1 OTF non normalizzata e normalizzata
Abbiamo visto che un’immagine, nelle condizioni di invarianza spaziale ed incoerenza, può
essere espressa come la convoluzione della densità di flusso dell’oggetto e della PSF del
sistema, cioè dalla relazione:
I i (Y , Z ) = I 0 ( y, z )
(9.36)
S ( y, z )
Nel dominio delle frequenze questa relazione si traduce nella:
F {I i (Y , Z )} = F {I 0 ( y, z )} F {S ( y, z )}
(9.37)
dove si è fatto uso del teorema di convoluzione. Si vede che è l’operazione di moltiplicazione
che produce l’alterazione delle frequenze dell’oggetto e le converte in quelle dell’immagine. In
altre parole è la F{S(y,z)} che trasforma lo spettro dell’oggetto in quello dell’immagine. Questo
è proprio ciò che abbiamo definito essere il ruolo dell’OTF, e pertanto chiamiamo OTF non
normalizzata la funzione:
I (kY , k Z ) F {S ( y, z )}
Verifichiamo ora quanto detto precedentemente riguardo al fatto che un impulso armonico si
conserva tale dopo la trasformazione. A questo proposito supponiamo di avere un’onda mono
dimensionale con
I 0 ( z ) = 1 + a cos(k Z z + ! )
con questa scelta l’integrale di convoluzione si esprime:
Ii (Z ) =
+
{1 + a cos[k Z ( Z
z ) + ! ]}S ( z )dz
(9.38)
espandendo il coseno abbiamo:
Ii (Z ) =
+
S ( z )dz + a cos(k Z Z + ! )
+
cos k Z zS ( z )dz + a sin(k Z Z + ! )
+
sin k Z zS ( z )dz
il secondo e terzo integrale sono rispettivamente le componenti in coseno e seno della
trasformata della S(z), cioè Fc {S ( z )} e F s {S ( z )} . Quindi,
Ii (Z ) =
+
S ( z )dz + Fc {S ( z )}a cos(k Z Z + ! ) + F s {S ( z )}a sin(k Z Z + ! )
Ricordando la definizione di trasformata complessa,
- 147 -
F { f ( z )} = F c { f ( z )} + F s { f ( z )}
o
F (k Z ) = A(k Z ) + iB(k Z )
e le seguenti relazioni:
F { f ( z )} = F (k Z ) ei" ( k ) = F (k Z ) [cos " + i sin " ]
Z
dove
F ( k Z ) = A 2 (k Z ) + B 2 (k Z )
" (k ) = tan
1/ 2
B (k Z )
A(k Z )
1
Possiamo quindi scrivere
F { f ( z )} I (k Z ) = M (k Z )ei
(kZ )
(9.39)
dove M (k Z ) e (k Z ) sono rispettivamente la MTF non normalizzata e la PTF rispettivamente.
La (9.38) può quindi riscriversi
Ii (Z ) =
+
S ( z )dz + aM (k Z ) cos[k Z Z + !
(k Z )]
(9.40)
Si noti che questa è una funzione della stessa forma della funzione di ingresso. Se la PSF è
simmetrica (cioè pari) F s {S ( z )} = 0, M (k Z ) = F c {S ( z )} e (k Z ) = 0 ; non c’è quindi variazione
di fase, come visto prima.
E’ uso comune definire una funzione di trasferimento normalizzata dividendo la I (k Z ) per
il valore che assume a frequenza zero, cioè I (0) =
+
S ( z )dz . La PSF normalizzata diviene
quindi:
S ( z)
Sn ( z ) =
+
(9.41)
S ( z )dz
e la OTF normalizzata,
T (k Z )
F {S ( z )}
+
= F {Sn ( z )}
(9.42)
S ( z )dz
o in due dimensioni
T (kY , k Z ) = M (kY , k Z )ei
( kY , k Z )
(9.43)
dove M (kY , k Z ) M (kY , k Z ) / I (0, 0) è la MTF normalizzata. In questo modo la (9.40) si
riscrive:
- 148 I i ( Z ) = 1 + aM (k Z ) cos[k Z Z + !
(k Z )]
dove la modulazione dell’immagine è aM (k Z ) , la modulazione dell’oggetto è a, e il loro
rapporto è la MTF normalizzata M(kZ).
Questa è solo una discussione introduttiva a questo modo di trattare i problemi dell’ottica,
per cui chi volesse approfondire consulti i libri citati nella bibliografia.