Capitolo 1 – Numeri Reali
L’Analisi Matematica studia il comportamento delle funzioni con particolare attenzione ai numeri
reali. Infatti, discuteremo di continuità, derivazione e integrazione per funzioni reali di variabile
reale. In questi primi paragrafi, quindi, introdurremo il concetto di numero reale, partendo
dall’introduzione di altri insiemi (sottoinsiemi di ) quali , e .
Numeri naturali, interi e razionali
L’insieme dei numeri naturali, che indicheremo con , è il primo insieme infinito che viene
insegnato fin dalle scuole elementari. Ma sotto questo insieme, all’apparenza semplice, si
nascondono molte definizioni e relazioni complicate.
Per esempio, cominciamo a definire il concetto di cardinalità di un insieme:
Def: Dato un insieme A, si definisce cardinalità di A
e si indica con cardA o |A|
il numero degli elementi di A.
La cardinalità di un insieme può essere finita (e si parla quindi di insiemi finiti) o infinita (e si parla
di insiemi infiniti).
In particolare, l’insieme dei numeri naturali costituisce il più piccolo insieme infinito pensabile e
tutti gli insiemi che hanno la stessa cardinalità di , si dicono numerabili. Il significato di questo
termine è semplice:
Def: Un insieme A è infinito se non è finito, se può essere messo in relazione biunivoca con un suo
sottoinsieme proprio o se esiste una funzione iniettiva, ma non suriettiva da A a valori in A.
In particolare, un insieme infinito A ha la cardinalità del numerabile, se può essere messo in
relazione biunivoca con , cioè se si possono “elencare” i suoi elementi, da qui il termine
“numerabile”.
Quindi la nozione di cardinalità per gli insiemi infiniti non è così semplice come lo è per gli insiemi
finiti. Nella fattispecie, se volessimo chiederci quale insieme ha più elementi, tra e , saremmo
costretti a concludere che questi due insiemi hanno la stessa cardinalità. Questo può sembrare
assurdo se pensiamo a come i due insiemi sono definiti:
: 0,1,2,...
: 0,1,1,2,2,...
Sembrerebbe, infatti, poiché è un insieme interamente contenuto in , che quest’ultimo contenga
più numeri del primo, ma non è così. Questo perché, per definizione, e hanno la stessa
cardinalità. Infatti, è possibile elencare gli elementi di :
00
11
2 -1
32
4 -2
…
Lo stesso vale per : infatti è possibile elencare anche gli elementi di questo insieme (le frazioni).
1
Possiamo allora enunciare il seguente teorema:
Teorema: L’insieme dei numeri naturali, l’insieme dei numeri interi relativi e l’insieme dei numeri
razionali hanno la cardinalità del numerabile, cioè sono insiemi infiniti equipotenti (che hanno la
stessa cardinalità) ad .
Per dimostrare questo teorema è sufficiente trovare un modo logico per elencare gli elementi di
La prima parte del teorema, quindi, è stata già dimostrata nella pagina precedente.
.
In particolare, è interessante comprendere quali numeri si trovano in . Abbiamo già detto che in
questo insieme sono contenute tutte le frazioni (e quindi anche e sono contenuti in ):
a
: : a Z , b N
b
a
c
e
sono uguali tra loro se ad bc . Per esempio,
b d
1 2
poiché 1 4 2 2 .
2 4
Ma la cosa più interessante è che ad ogni frazione è associato un numero decimale. Per esempio,
alla frazione ½ è associato 0,5. Ed è interessante il fatto che in sono presenti solo numeri
decimali periodici (che sono tutti e soli i numeri decimali che possono essere scritti come frazioni).
Per esempio, 2 non è un numero razionale, poiché non esistono due interi a e b, primi tra loro,tali
che il loro rapporto abbia come risultato 2 , come afferma il seguente teorema:
Inoltre, diciamo che due numeri
Teorema:
2 non è un numero razionale.
Dimostrazione: Se
e b tali che:
2 fosse un numero razionale, allora esisterebbero due numeri interi coprimi a
a
con a, b primi tra loro e b 0 .
b
Dimostriamo allora che se esistessero questi due numeri succederebbe qualcosa di strano. Cioè
operiamo una dimostrazione “per assurdo”.
a
Se 2 allora 2b a 2b 2 a 2 cioè a 2 è un numero pari.
b
Ma se a 2 è un numero pari allora anche a è pari (infatti, i numeri pari al quadrato sono pari e i
numeri dispari al quadrato sono dispari).
Se a è pari allora esiste un numero c tale che io possa scrivere a come 2 volte c: a 2c .
2
Allora
2b a 2b 2 a 2 2b 2 (2c) 2 4c 2 b 2 2c 2 .
Per lo stesso motivo di prima, anche b è un numero pari. Ma questo è assurdo, perché per ipotesi a e
b devono essere primi tra loro. Invece, ho dimostrato che a e b, se esistono, devono necessariamente
essere entrambi divisibili per 2. Quindi non esistono due numeri interi il cui rapporto rende 2 .
Cvd
2
Inoltre, vale il seguente teorema, di cui non diamo la dimostrazione, ma solo un accenno al suo
senso:
1
1
consideriamo la seguente frazione: . Noi sappiamo che al numero corrisponde un numero
3
3
decimale periodico, che si ottiene dividendo 1 per 3:
1
1 : 3 0, 3 .
3
1
Ma noi sappiamo anche che 3 1 e questo significa che 0, 3 3 1 . Ma operando una
3
moltiplicazione banale, otteniamo che 0, 3 3 0, 9 . Questo di porta ad affermare che:
Teorema: 0, 9 1
Il significato di questo teorema è fondamentale, perché ci porta a dire che “non esistono” numeri
decimali di periodo 9. Cioè, che ogni numero decimale di periodo 9 non è altro che il numero
decimale che ha come ultima cifra prima del 9 la sua cifra successiva.
Per esempio,
0, 9 1
3,49 3,5
12,00129 12,0013
In termini tecnici si dice che 0, 9 “converge” a 1.
Il problema dei numeri razionali
I numeri razionali, sembrano essere, all’apparenza, l’insieme numerico più grande in assoluto.
Tuttavia, già nel paragrafo precedente abbiamo constatato che esistono numeri, quali 2 , che non
appartengono a questo insieme. Poniamo adesso un ulteriore problema:
Def.: Sia A un insieme infinito e B un suo sottoinsieme qualunque superiormente limitato (risp.
inferiormente limitato). A si dice completo se l’insieme dei maggioranti di B (risp. minoranti)
ammette minimo (risp. massimo).
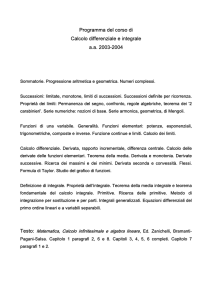
Chiaramente, allora non è completo. Infatti, prendiamo questo sottoinsieme di
B : x Q : x 2 2 . Disegniamo B:
:
Chiaramente, 2 non è razionale e B coincide con l’insieme dei numeri compresi tra 2 e 2 .
Quindi B è superiormente (e anche inferiormente) limitato. Tuttavia, l’insieme dei maggioranti di B
(cioè tutti i numeri razionali più grandi di 2 ) non ammette minimo. Infatti non esiste un numero
razionale più grande di 2 e più piccolo di ogni altro numero che si trova oltre 2 . In pratica,
tra i numeri che si trovano oltre 2 (la parte verde della retta) non c’è un numero razionale più
piccolo degli altri (cioè il minimo tra i numeri che si trovano nell’area evidenziata in verde).
3
Tutto ciò, solo perché
non è un insieme completo e perché
2 Q .
Un’altra questione che non risolve, è l’esistenza di numeri non periodici. Banalmente, sempre
riguardo a 2 , quando Pitagora si mise in testa di calcolare la diagonale di un quadrato in funzione
del lato, scoprì che era necessario ricorrere a dei numeri che non erano razionali. Questa scoperta
avrebbe rovinato la scuola dei Pitagorici e, pertanto, venne tenuta segreta e chiunque ne avesse
accennato sarebbe finito ucciso in un modo o nell’altro.
Come è noto, detto L il lato di un quadrato, la diagonale si calcola come D 2 L ed è
conseguenza del Teorema di Pitagora.
Ma non è solo la diagonale di un quadrato a mettere in crisi un intero sistema di numeri. Anche la
misura della circonferenza, per esempio, ricorre all’utilizzo di un numero irrazionale (che non può
essere scritto come rapporto di interi), ovvero , un numero che non è solo irrazionale, ma
addirittura trascendente (ovvero non può essere risultato di equazioni a coefficienti razionali).
Tanto per intenderci:
x 2 3x 1 0
3 5
x1
2
Ammette soluzioni irrazionali:
, pur avendo coefficienti interi (e quindi razionali).
x 3 5
2
2
Invece, non esistono equazioni a coefficienti razionali tali che le soluzioni siano numeri
trascendenti.
In particolare, è definito come il rapporto tra ogni circonferenza e il proprio diametro:
circonferenza circonferenza
ove R è il raggio della circonferenza. Da questa relazione si
diametro
2R
ricava la ben nota formula: 2R circonferenza .
Tuttavia, diciamo che è denso in . Cioè tra due numeri reali esiste sempre almeno un numero
razionale.
L’introduzione del campo reale
Abbiamo visto come ogni insieme studiato fin’ora rappresenta una miglioria apportata al
precedente. Per esempio, i numeri interi sono un’estensione dei numeri naturali e le frazioni sono
una generalizzazione dei numeri interi. I numeri reali rappresentano un’ulteriore “ingrandimento”
dell’insieme dei razionali. Ma l’importante nell’introduzione di questi numeri sta nel fatto che è
un insieme completo, nel senso precisato dalla definizione del paragrafo precedente.
Rimanendo sull’esempio dell’insieme B : x Q : x 2 2 , in vale la definizione di
completezza, come si può dimostrare, e quindi l’insieme dei maggioranti di B ammette minimo (che
è proprio 2 ), in quanto 2 è un numero reale e quindi possiamo considerarlo come il più piccolo
numero che non è contenuto in B (considerazioni analoghe per 2 e l’insieme dei minoranti di
B).
Teorema di completezza di
Inoltre in
campo:
4
:
è completo.
possiamo definire delle operazioni che conferiscono ad esso la struttura algebrica di
Def: Sia A un insieme, sia * un’operazione compatibile con A. A, munito di *, cioè (A,*) è una
struttura algebrica.
Inoltre, definiamo:
Def: Sia A un insieme, siano + e * due operazioni compatibili con gli elementi di A,
la struttura algebrica (A,+,*) si dice campo se:
L’operazione + è associativa e commutativa;
Esiste un elemento neutro rispetto a +;
Ogni elemento di A ammette un elemento inverso rispetto a +;
L’operazione * è associativa e commutativa;
Esiste un elemento neutro rispetto a *;
Ogni elemento di A ammette un elemento inverso rispetto a *;
Vale la proprietà distributiva, cioè detti a,b e c tre qualunque elementi di A, si ha:
a*(b+c)=a*b+b*c.
In sono definite due operazione che sono compatibili con la struttura di campo: la somma e il
prodotto. Infatti:
Teorema: ( , +, ·) è un campo, poiché:
L’operazione + è associativa e commutativa;
0 è l’elemento neutro rispetto a +;
Ogni numero reale ammette un opposto;
L’operazione · è associativa e commutativa;
1 è l’elemento neutro rispetto a ·;
Ogni elemento di ammette un elemento inverso rispetto a ·;
Vale la proprietà distributiva del prodotto rispetto alla somma, cioè detti a,b e c tre
qualunque numeri reali, si ha: a(b+c)=ab+bc.
Il fatto che , dotato di somma e prodotto, sia un campo, conferisce all’insieme dei reali numerose
proprietà fondamentali. In particolare, anche ( , +, ·) è un campo (in particolare un sottocampo di
), ma a differenza di non è un campo completo. Inoltre, ma questo vale anche per gli altri
insiemi che abbiamo studiato, il campo reale è totalmente ordinato, cioè presi due qualunque numeri
reali a e b, vale a<b, oppure a>b, oppure a=b.
Lo studio di come campo è molto vasto. In particolare, le operazioni che abbiamo sopra citato
dovrebbero essere definite sulla base delle operazioni definite in e negli insiemi precedenti.
Tuttavia, solo a titolo accademico, citerò unicamente la definizione di somma tra due numeri reali.
Siano e due numeri reali, si ha:
: sup ( n ) ( n )
n
Ove (n ) e (n ) sono le troncature n-esime di e rispettivamente. Ovvero, è definito
come l’estremo superiore di un insieme che contiene tutte le somme tra tutte le troncature n-esime
di e . In questo modo si è definita la somma tra numeri reali come la somma tra due numeri
razionali (le troncature n-esime, infatti, sono numeri decimali finiti non periodici, e quindi sono
razionali).
Nonostante tutte queste proprietà, il campo dei reali non è un campo “algebricamente chiuso”, cioè
5
un’equazione di grado n non è detto che abbia n soluzioni. Una generalizzazione del campo reale, o
meglio, il campo algebricamente chiuso più piccolo che contiene il campo reale è il campo
complesso ( ,+,·).
6
Capitolo 2 – Le funzioni
L’analisi matematica è senz’altro la branca della matematica più studiata a livello accademico.
Infatti, la maggior parte delle discipline scientifiche presentano i primi corsi di analisi matematica.
Noi ci occuperemo di quello che, a livello universitario, prende il nome di Analisi Matematica 1.
L’analisi si occupa dello studio di oggetti matematici “densi”, quali le funzioni.
Non entreremo del dettaglio, cioè non specificheremo cos’è una relazione, ma il senso pratico della
definizione di relazione è immediato nel senso che una relazione tra due oggetti matematici è una
legge che lega tali entità.
Definiamo allora una funzione nel modo seguente:
Def.: Definiamo funzione f : A B una relazione che associa ad ogni elemento di un insieme A
(detto Dominio di f ) uno e un solo elemento dell’insieme B (detto Codominio di f ).
Tre esempi di funzioni sono:
Infatti, ad OGNI elementi di A è associato uno e un solo elemento di B (non è richiesto il fatto che
tutti gli elementi di B vengano “raggiunti” o che ad elementi diversi di B siano associati elementi
diversi di A).
Mentre non è una funzione:
In quanto d 1 e d 5. Cioè esistono degli elementi di A a cui sono associati più elementi di B.
Anche:
Non è una funzione, poiché all’elemento e di A non è associato alcun elemento di B.
In particolare, la def. di funzione stabilisce le condizioni sul dominio necessarie affinché f sia una
funzione. Le seguenti definizioni, invece stabiliscono alcune importanti condizioni sul codominio di
f, ma non è necessario che una funzione rispetti queste condizioni per essere tale.
7
Def.: Sia
f
f
f
f : A B una funzione, allora:
si dice iniettiva se a, b A accade che f ( a) f (b) a b .
si dice suriettiva se b B esiste almeno un a A tale che f ( a) b .
si dice biiettiva se è iniettiva e suriettiva.
Cioè, f è iniettiva se ogni elemento di A viene mandato in un differente elemento di B ed f è
suriettiva se tutti gli elementi di B vengono raggiunti (non importa da quanti elementi diversi di A).
Per esempio, la funzione:
È iniettiva, poiché ad elementi diversi di A sono associati elementi diversi di B, ma non è suriettiva,
infatti l’elemento 5 non viene mai raggiunto.
La funzione:
invece, è suriettiva, poiché ogni elemento di B ha una controimmagine (un elemento che lo
raggiunge) in A, ma non è iniettiva, poiché l’elemento 3 ha due controimmagini diverse (c e d), cioè
sia c che d vengono mandate nello stesso elemento (cioè in 3).
La funzione:
Non è né iniettiva né suriettiva. Non è iniettiva, poiché sia la lettera a che la lettera d hanno come
immagine 4, mentre non è suriettiva perché l’elemento 5 non ha controimmagini.
Infine, la funzione:
È sia iniettiva che suriettiva, cioè è biiettiva.
Quando A e B sono insiemi finiti, è facile distinguere quali funzioni sono iniettive e quali suriettive.
In particolare, vale il seguente teorema:
8
Teorema: Sia f : A B una funzione definita su due insiemi finiti. Allora:
1. Se cardA > cardB, allora f non può essere iniettiva;
2. Se cardA < cardB, allora f non può essere suriettiva.
Questo teorema è esemplificato dagli esempi precedenti, che riportiamo qua sotto:
1.
2.
Noi ci occuperemo, in particolari, di funzioni reali di variabile reale, cioè di funzioni f :
definite attraverso una legge y f (x) . Per queste funzioni sarà più semplice stabilire l’iniettività e
la suriettività. Ci basterà, infatti, andare a studiare il loro grafico. Per esempio, la funzione
y f ( x) x (tratteggiata) è biiettiva, come il suo grafico ci suggerisce, mentre la funzione
y g ( x) x 2 (linea continua) non è né iniettiva né suriettiva:
È facile, anche facendo i calcoli, convincerci che g(x) non è né iniettiva né suriettiva: si prenda il
valore g(x) = 9. Esistono due valori di x tali che g(x) = 9, ovvero x = 3 e x = -3.
Mentre, se consideriamo f(x) = 9, otteniamo solo x = 9 come soluzione.
Portiamo altri esempi riguardante le funzioni reali di variabile reale:
La funzione f : definita dalla legge
y = sen(x) non è né iniettiva né suriettiva.
Infatti, sen(x) = 5 non ha soluzioni reali ed
inoltre, la funzione è periodica e quindi
senx sen( x 2 ) per ogni x reale,
nonostante x x 2 .
9
La funzione y = artgx è una funzione non iniettiva,
ma suriettiva, mentre se consideriamo la funzione
ricavata dall’arcotangente, con una restrizione del
dominio a ; otteniamo una funzione
2 2
biiettiva.
Per le funzioni reali di variabile reale vale il seguente teorema:
Teorema: Sia f :
.
f invertibile f biiettiva
Cioè una funzione reale di variabile reale è invertibile se e solo se essa è iniettiva e suriettiva.
In tal caso, l’inversa si indica con: f -1 : .
Esempio: La funzione seno non è invertibile se considerata in tutto il suo dominio, così come il
coseno e come la tangente. Tuttavia, sono invertibili le loro restrizioni (come è già noto).
Esempio: La funzione f : , definita da y x 2 non è biiettiva su tutto , ma è iniettiva
nell’intervallo 0,) e suriettiva sullo stesso, pertanto, la sua restrizione a tale intervallo, cioè la
funzione f : 0,) 0,) è invertibile e la sua inversa è la funzione f -1 : 0,) 0,)
definita da y x .
Esempio: La funzione g :
La sua inversa è la funzione g -1 :
Esempio: La funzione h :
, definita da y x 3 è biiettiva su tutto
e quindi è invertibile.
definita da y 3 x .
, definita da y e x , non è suriettiva, ma è iniettiva. Quindi, la
sua restrizione alla funzione h : (0,+∞) , è invertibile e la sua inversa è la funzione
h -1 : (0,+∞) definita da y ln x .
Alcune di queste funzioni sono definite da a valori in , nonostante il loro codominio sia
differente. Per esempio, la funzione seno, è una funzione senx : , nonostante il suo
codominio sia [-1;1]. In effetti, le funzioni si definiscono indicando come codominio il campo su
cui si sta lavorando. Quindi la funzione senx : [-1;1], sebbene sia identica alla funzione
precedente, è una funzione diversa. Se volessimo tracciare i loro grafici, otterremmo:
Cioè cambia solo la “lunghezza” dell’asse y.
10
Cardinalità dei sottoinsiemi di
Con le funzioni reali di variabile reale succedono delle cose un po’ strane dovute al fatto che è un
insieme infinito.
Il seguente teorema è fondamentale per l’Analisi Matematica, nel senso che permette di lavorare su
un sottoinsieme di , piuttosto che su tutto l’asse reale.
Teorema: L’intervallo (0,1), sottoinsieme di
cardinalità.
e l’insieme dei numeri reali hanno la stessa
Dimostrazione: (0,1) e hanno la stessa cardinalità de esiste una funzione biiettiva f : (0,1) .
Quindi, consideriamo la funzione f : (0,1) definita dalla legge y cot g (x ) . Questa funzione
è iniettiva in (0,1) ed è anche suriettiva. Quindi è biiezione tra (0,1) e . Quindi (0,1) e hanno la
stessa cardinalità.
Cvd
Questo teorema, si diceva, è importante, perché permette di dimostrare dei risultati solo per
l’intervallo (0,1) per poi estenderli a tutto .
A scopo accademico, dimostriamo il seguente teorema:
Teorema di Cantor: card
> card .
Dimostrazione: Alla luce dei risultati precedenti, sappiamo che card = card . Quindi, poiché
è un insieme infinito e numerabile, ci basterà dimostrare che elencando i numeri reali, vengono
inevitabilmente “saltati” dei numeri. Quindi, dimostriamo per assurdo l’asserto.
Per il teorema precedente, inoltre, card(0,1) = card , quindi il teorema è completamente
dimostrato se al posto di dimostrare che card > card dimostrassimo che card(0,1) > card .
Per assurdo, immaginiamo che card(0,1) card .
Poiché card(0,1) = card e , non può essere card(0,1) < card . Quindi, in fin dei conti,
dobbiamo solo dimostrare che affermare che card(0,1) = card porterebbe ad un assurdo.
Quindi, per assurdo, sia card(0,1) = card . Allora, (0,1) è un sottoinsieme numerabile di e quindi
posso elencare tutti i suoi elementi.
Sia allora questo l’elenco dei numeri compresi tra 0 e 1 scritti come allineamento di cifre decimali:
1. 0,c11c12c13...c1n…
2. 0,c21c22c23...c2n…
3. 0,c31c32c33...c3n…
…
n. 0,cn1cn2cn3...cnn…
…
Allora questi, poiché vale l’ipotesi dell’assurdo, sono tutti e soli i numeri compresi tra 0 e 1.
Ma allora, consideriamo il numero ottenuto nel modo seguente:
0,c1c2c3...cn…
c kk 0
c k 0
Ove
se
c kk 0
c k 1
Questo numero è sicuramente più grande di 0 e più piccolo di 1, cioè appartiene all’insieme (0,1),
ma non è tra i numeri elencati, in quanto è, per costruzione, un numero differente da tutti quelli
elencati precedentemente. Ma questo è assurdo, poiché nell’elenco dovrebbero esserci tutti i numeri
compresi tra 0 e 1. Quindi è stato assurdo ipotizzare che fosse possibile elencare tutti i numeri in
11
(0,1) e quindi card(0,1) > card . Da cui l’asserto.
Cvd
Curve che non sono funzioni
Concludiamo il capitolo con degli esempi di curve che non sono funzioni. Cominciamo con le
generiche parabole con asse parallelo all’asse x, come per esempio : [0,) definita da
x = y2:
Questa curva non risponde alla definizione di funzione.
Infatti per x = 4, per esempio, corrispondono due y:
y1= 2
y 2 = -2
Mentre è una funzione la “restrizione” di alla funzione
f : [0,) [0,) , che già conosciamo, ovvero la
funzione y x .
Esempio: La curva : x 2 y 2 1 , cioè la circonferenza centrata in O e avente raggio 1:
Per lo stesso motivo della parabola precedente, questa
non è una funzione.
Tuttavia, in questo esempio si vede bene come sia
l’”unione” dei grafici di due funzioni:
y 1 x 2
y0
:
se
y0
y 1 x 2
Prese separatamente, queste sono funzioni. Se messe
insieme, diventano una curva.
Allo stesso modo, i luoghi geometrici come le ellissi, le iperboli con asse trasverso non orizzontale,
le parabole con asse di simmetria non verticale non sono funzioni, ma sono unioni di funzioni.
Dominio di una funzione
In questo paragrafo ci occuperemo del calcolo dei domini delle funzioni reali di variabile reale.
Sia f : D , una funzione reale di variabile reale definita su un sottoinsieme D di .
Distinguiamo i seguenti casi:
Se f è una funzione razionale fratta
g ( x)
Cioè se f è del tipo: f ( x)
, allora, occorre imporre che il denominatore sia diverso da 0.
h( x )
Infatti, f non può essere definita nei punti che azzerano il denominatore. Il perché è molto semplice.
a
Infatti, le scritture del tipo , con a 0 , non hanno senso matematicamente. Infatti, se a 0 e
0
12
a
b allora, per definizione, a b 0 0 , ma a 0 , quindi è impossibile. Il caso a 0 , invece,
0
lo studieremo quando studieremo la continuità delle funzioni.
Se f è irrazionale
Cioè se è del tipo f ( x) 2 k g ( x ) , cioè se f è funzione di una radice di ordine pari, allora occorre
imporre che il radicando (g(x)) sia maggiore o uguale a 0. Infatti, non esistono, in , radici pari di
numeri negativi.
Se f è una funzione circolare
Le funzioni seno, coseno e arcotangente hanno come dominio .
La funzione f ( x ) tg ( g ( x)) ha dominio g ( x) k .
2
La funzione f ( x ) cot g ( g ( x)) ha dominio g ( x) k .
La funzione f ( x) arsen( g ( x)) e la funzione f ( x) ar cos( g ( x)) hanno dominio 1 g ( x) 1 .
Se f è una funzione logaritmica
g ( x) 0
Se f ( x) log g ( x ) h( x) allora occorre imporre: g ( x) 1 .
h ( x ) 0
Se f è una funzione esponenziale
g ( x) 0
Se f ( x) g ( x) h ( x ) occorre imporre
.
g ( x) 1
Se f è una funzione potenza ad esponente irrazionale
Se f ( x) g ( x) con R \ Q , allora anche in questo caso occorre imporre g ( x) 0 .
Chiaramente, di fronte ad una funzione composta, otteniamo il seguente risultato:
Teorema:Sia f : R R una funzione reale di variabile reale tale che f ( x) g (h( x)) . Siano D f ,
Dh e D g i domini di f, g e h. Allora, D f D g Dh .
Esempio: Ci proponiamo di calcolare il dominio D f della funzione f ( x)
possiamo immaginare il dominio di questa funzione come il dominio di
di
x 2 . Pertanto:
x intersecato al dominio
D f : x R : x 0, x 2 0
Possiamo calcolare questo dominio di f come il sistema tra le due condizioni:
x 0
x 0
x 0
Df :
x4
x
4
x
2
0
x
2
Quindi il dominio della funzione nell’esempio è D f [4, ) .
13
x 2:
Capitolo 3 – Successioni
In questo capitolo ci proponiamo di studiare particolari funzioni a valori in un insieme generico di
variabile naturale. Studiando queste funzioni, dette successioni, arriveremo al concetto di limite.
Def: Sia X un insieme generico non vuoto. Sia f :
X.
X. Allora f è detta successione a valori in
Una successione si indica con il simbolo x n , che indica anche l’insieme contenente i valori della
successione. Invece, l’immagine f(n) dell’intero n viene solitamente indicata semplicemente con x n .
Questo prende il nome di termine generale della successione.
In particolare, noi studieremo le successioni a valori reali, cioè le successioni che hanno come
codominio.
Un esempio di successione a valori reali è la seguente:
1
Esempio: x n . Chiaramente, poiché n varia in , il dominio di questa successione è (0,) . In
n
1 1 1
questo caso, l’insieme x n è l’insieme 1, , , ,... ed è un insieme infinito.
2 3 4
Definiamo adesso un termine che matematicamente è molto usato:
Def.: Si dice che una successione x n possiede definitivamente una proprietà P se esiste un n0
tale che per ogni n > n0 , il termine generale x n possiede la proprietà P.
2
Esempio: La successione x n n 4 è definitivamente positiva. Poiché esiste un n0 = 2, tale che
per ogni n > 2, n 2 4 0 .
Se x n gode della proprietà P1 per ogni n > n0 e gode di P2 per n > n1, allora x n gode di entrambe
le proprietà definitivamente per n > max n0 , n1 .
Convergenza e divergenza
1
. Ci rendiamo conto che all’aumentare di n, xn diminuisce e si
n
1
1
1
1
1
0,01;... .
avvicina a 0. Infatti: x n 1; 0,5; 0, 3, 0,25;... 0,1;...
3
4
10
100
2
1
1
1
Quindi, la successione x n è definitivamente minore di
, definitivamente minore di
,
n
100
1000
eccetera. In questo caso, significa che x n è definitivamente prossima allo 0.
La successione x n n , invece, aumenta all’aumentare di n in , quindi non si avvicina a nessun
valore particolare, anzi, continua ad aumentare.
Infine, la successione x n sen(n) continua ad oscillare.
Quello che ci chiediamo in questo paragrafo è: al crescere di n, come si comporta la successione?
1
La risposta è la seguente: alcune successioni, come x n , “tendono” ad un numero finito, altre,
n
Consideriamo la successione x n
14
come x n n “tendono all’infinito” e altre ancora non tendono a niente (sono oscillanti).
Definiamo allora:
Def.: Sia x n una successione a valori reali. Si dice che xn converge a x0 R se:
0, n0 : n n0 , x n x 0
xn x0 .
In tal caso si scrive: nlim
Def.: Sia x n una successione a valori reali. Si dice che xn diverge a (o ) se:
M 0, n0 : n n0 , x n M , (risp. M 0, n0 : n n0 , x n M )
In tal caso si scrive: lim x n (risp. lim x n )
n
n
Def.: Sia x n una successione a valori reali. Se xn converge o diverge allora si dice che xn è
regolare. Se xn non è regolare, allora si dice che xn è irregolare, od oscillante.
In tal caso si dice che non esiste limite.
In pratica, una successione converge a x0 R se xn appartiene definitivamente ad un intorno di x0 .
xn diverge, invece, se xn appartiene definitivamente ad un intorno di .
Possiamo anche definire la convergenza da destra o da sinistra. Per esempio, in base a queste
1
xn 0 .
definizioni, x n tende a 0 per n che tende a , quindi nlim
n
La domanda che sorge spontanea è: il limite, se esiste, è unico? Il seguente teorema risponde alla
domanda:
Teorema di unicità del limite: Sia x n una successione regolare a valori reali. Se x n tende a x0 e a
x1 per n che tende a , allora x0 x1 .
Dimostrazione: Per assurdo, non valga il teorema. Quindi, sia x0 x1 .
Se x0 x1 , allora esiste un piccolo intorno di x0 che non contiene x1 e viceversa. Quindi, esiste un
raggio R > 0 tale che: U ( x0 , R ) U ( x1 , R ) (proprietà di Haudorff).
Ma x n tende a x0 e quindi definitivamente x n sta in un intorno di x0 .
Allo stesso modo, x n tende a x1 , e quindi, definitivamente x n sta in un intorno di x1 .
Quindi, definitivamente, U ( x 0 , R ) U ( x1 , R ) x n . Cioè, definitivamente, x n appartiene ad
entrambi gli intorni. Ma questo è assurdo, perché U ( x0 , R ) U ( x1 , R ) . Quindi non può essere
x0 x1 . Quindi il teorema è vero.
Cvd
Definiamo adesso il concetto di punto di accumulazione.
Def.: Sia A un sottoinsieme di un insieme X non vuoto. Un punto x0 X si dice di accumulazione
per A se:
0 x x 0 : x U ( x 0 , ) A
Ovvero, se in ogni intorno di x0 esiste almeno un punto di A diverso da x0 .
Definiamo allora una successione limitata:
15
Def.: Una successione x n è limitata, se è limitato l’insieme x n nell’insieme di arrivo.
1
è limitata, perché x n (0,1] e quindi è un insieme limitato.
n
Chiaramente, si può dimostrare che ogni successione convergente è anche limitata.
Esempio: La successione x n
Vale il seguente risultato, che riguarda i punti di accumulazione:
Teorema: Sia x n una successione a valori in X e sia A un suo sottoinsieme. Se x0 A è un
punto di accumulazione per A, allora esiste una successione di punti x n A , x n x0 , convergente
a x0 .
Questo teorema ha un’importante implicazione nelle successioni reali. Questo poiché ogni punto di
è di accumulazione per . Quindi otteniamo che per ogni punto di esiste una successione
convergente a tal punto.
Sottosuccessioni
Andiamo adesso ad analizzare le sottosuccessioni di una successione e tutte le proprietà di
convergenza ad esse legate.
Def.: Sia x n una successione a valori in un insieme X. Sia
n1 n 2 ... nk ...
Una qualsiasi successione crescente di numeri naturali. Si chiama sottosuccessione di x n la
successione
x n1 , x n 2 ,..., x nk ,...
In pratica, si considerano solo alcuni elementi di una successione. Una sottosuccessione è, quindi,
una relazione biunivoca di un qualunque sottoinsieme di numeri naturali con un insieme X.
Naturalmente si hanno i seguenti risultati, legati alla convergenza:
Sia x n una successione a valori in X.
Teorema 1: se x n converge a x0 X , allora ogni sua sottosuccessione converge allo stesso
limite.
Teorema 2: se x0 X è punto di accumulazione per x n , allora esiste una sottosuccessione di
xn convergente a x0 .
Per quanto riguarda le successioni reali, se una successione diverge, allora anche ogni sua
sottosuccessione diverge allo stesso infinito.
Convergenza da destra o da sinistra per successioni a valori reali
Nella pagina precedente abbiamo definito cosa significa che una sottosuccessione converge o
diverge ad un dato limite. Possiamo altresì raffinare la definizione aggiungendo dei dettagli
1
importanti. Per esempio, la successione solita x n converge sì a 0, ma converge a 0 passando
n
16
per numeri più grandi di 0. Quindi si dice che x n 0 per n .
Def.: Sia x n una successione a valori reali. Si dice che xn converge a x0 R per eccesso se:
0, n0 : n n0 , x 0 x n x0
xn x0 .
In tal caso si scrive: nlim
Def.: Sia x n una successione a valori reali. Si dice che xn converge a x0 R per difetto se:
0, n0 : n n0 , x 0 x n x0
xn x0 .
In tal caso si scrive: nlim
In soldoni, x n converge a x0 per eccesso se xn appartiene definitivamente ad un intorno destro di
x0 . x n , invece, converge a x0 per difetto se xn appartiene definitivamente ad un intorno sinistro
di x0 .
Teorema di permanenza del segno
Questo teorema, che adesso enunceremo, è fondamentale per dimostrare parecchi teoremi, per
generalizzare dei risultati e permetterci di considerare positive le funzioni in intervalli, anche
infinitesimi, quando saremo a conoscenza del loro segno in un determinato punto.
Teorema di permanenza del segno: Sia x n una successione a valori reali convergente a x0 .
Se x0 > 0, allora x n è definitivamente positiva;
Se x0 < 0, allora x n è definitivamente negativa;
Se x n è definitivamente positiva, allora x0 0 ;
Se x n è definitivamente negativa, allora x0 0 .
Notiamo come i primi due punti garantiscono la permanenza di una disuguaglianza stretta, mentre il
viceversa del teorema (cioè gli ultimi due punti) “indebolisce” il segno di disuguaglianza,
trasformando una disuguaglianza stretta in una disuguaglianza debole.
1
Infatti, consideriamo ancora la successione reale x n . x n 0 chiaramente per ogni n. Ma non
n
tende ad un valore strettamente positivo.
Teorema del confronto per le successioni
Un altro risultato, che questa volta ci permetterà di studiare la convergenza di alcune successioni, è
il teorema del confronto. Grazie ad esso, saremo in grado di stabilire, attraverso alla ricorrenza a
successioni che maggiorano e minorano una data successione, quando essa è convergente,
divergente e, più nel dettaglio, a che limite tende.
17
Criterio del confronto per le successioni (convergenza): Siano x n , y n e z n tre successioni
reali. Sia . Se valgono le seguenti ipotesi:
x n e z n per n ;
xn yn z n definitivamente.
Allora anche yn .
Esempio: La convergenza della successione:
xn
Vale la seguente disuguaglianza:
sen(n)
n
1 sen(n) 1
Da cui, dividendo per n, si ottiene:
1 sen( n) 1
n
n
n
Passando al limite:
1
sen(n)
1
lim
lim
n n
n
n n
n
sen(n)
0 lim
0
n
n
sen(n)
0.
Quindi, per il criterio del confronto, segue la convergenza lim
n
n
Le successioni che minorano e maggiorano la successione studiata, ricordano due carabinieri che
conducono in cella un prigioniero. Per questo, il criterio del confronto, è spesso chiamato Teorema
dei carabinieri.
lim
Criterio del confronto per le successioni (divergenza): Siano x n e y n due successioni reali.
Se valgono le seguenti ipotesi:
x n per n ;
x n y n definitivamente.
Allora anche y n .
Se:
y n per n ;
x n y n definitivamente.
Allora anche x n .
La dimostrazione di questi teoremi è una conseguenza della definizione di convergenza e
divergenza di una successione.
2
Esempio: Dimostriamo la divergenza di un caso banalmente divergente: x n n .
2
2
Poiché y n n x n n definitivamente e y n n per n , allora anche x n n tende
allo stesso limite.
18
Il numero e
Uno dei numeri più famosi nel mondo della matematica fu studiato da Euler e Napier e prende il
nome di numero di Nepero (lat. Napier). Come , anche e è un numero trascendente (quindi non
può essere risultato di un’equazione a coefficienti razionali) ed è definito come il limite di una
successione:
n
1
Def.: Sia x n la successione x n 1 . Allora si definisce e come:
n
n
1
lim x n lim 1 e
n
n
n
Questo limite si presenta in una forma di indeterminazione del tipo 1 ed è quindi necessario
ricorrere ad altri metodi per calcolarlo. Occorre, in primis, dimostrare che la successione
n
1
x n 1 è convergente, poi che converge ad e.
n
1
Quello che conta, tutto sommato, è sapere che i limiti nella forma lim 1
n
xn
Ordine di infiniti
xn
e.
Diamo ora alcune definizioni:
Def.: Sia x n una successione a valori reali. x n è un infinito se:
lim x n .
n
Siano x n e y n due infiniti. Se
lim
n
xn
yn
Allora si dice che x n è un infinito di ordine superiore rispetto a y n (o analogamente y n è
infinito di ordine inferiore rispetto a x n .
n
Esempio: successioni x n n , x n e , x n n! n(n 1)...2 1 sono tutti infiniti. E, per esempio,
x n n è un infinito di ordine inferiore rispetto a y n n 2 , infatti:
lim
n
xn
n2
lim
lim n .
y n n n n
Esiste un ordine tra infiniti ed è il seguente (con il simbolo << si indica che la successione alla
sinistra di << è un infinito di ordine inferiore rispetto alla successione che si trova a destra):
log a n n a n n! n n
Questa “catena di disuguaglianze” si può dimostrare, ma occorrono strumenti di cui non
disponiamo. Quando studieremo il teorema di de L’Hopital daremo una pseudo-dimostrazione.
Quindi, per esempio, ci proponiamo di calcolare il valore limite della successione:
19
3n 4
n 5 ln 10 n
lim
Da notare come la successione al numeratore è elevata ad un esponente minore della successione al
denominatore. Ciò non influisce, in ogni caso, sul fatto che una qualunque successione potenza è un
infinito di ordine superiore rispetto ad una successione logaritmica generica. Questo ci porta a
concludere che, per definizione di infinito, la successione esaminata è un infinito.
Concludiamo dicendo che due successioni infinite sono due infiniti dello stesso ordine se esiste un
numero reale positivo tale che:
x
lim n
n y
n
Ordine di infinitesimi
Così come abbiamo definito un ordine tra successioni infinite, definiamo le successioni
infinitesime:
Def.: Sia x n una successione a valori reali. x n è un infinitesimo se:
lim x n 0 .
Siano x n e y n due infinitesimi. Se
n
lim
n
xn
0
yn
Allora si dice che x n è un infinitesimo di ordine superiore rispetto a y n (o analogamente
y n è infinitesimo di ordine inferiore rispetto a xn .
Chiaramente, anche in questo caso, è possibile stabilire una relazione tra infinitesimi. Inoltre,
diciamo che una successione infinitesima x n 0 è un infinitesimo di ordine rispetto a y n 0
se:
xn
lim
n
yn
Con reale positivo.
o – piccolo
Definiamo ora il concetto di o – piccolo, un concetto che ci permette di introdurre una “scrittura
fuori dal limite” di cui tratteremo successivamente.
Def.: Siano x n e y n due successioni reali e sia y n 0 . Se
x
lim n 0
n y
n
Allora si dice che x n è un o – piccolo di y n e si scrive:
x n o( y n )
20
Usando la nozione di ordine tra infiniti possiamo esemplificare questo concetto:
n
Il limite: lim n 0 poiché il denominatore tende a infinito più rapidamente del numeratore.
n e
Non solo, ma come è stato anticipato, possiamo usare il concetto di o – piccolo per indicare
qualcosa che tende a 0 con una certa rapidità.
Valgono, per gli o – piccoli, le seguenti proprietà.
o( x n )
lim
0
n
xn
C 0 C o( x n ) o( x n )
y n o( x n ) o( x n y n )
o ( x n )o ( y n ) o ( x n y n )
o(o( x n )) o( x n )
Infine, se y n o( x n ) e z n o(t n ) allora y n z n o( x n ) o(t n )
Successioni asintotiche
Def.: Siano x n e y n due successioni reali e sia y n 0 . Se
x
lim n 1
n y
n
Allora si dice che x n è asintotica a y n e si scrive:
xn yn
Il concetto di asintotico è molto importante, perché ci permette, attraverso alcuni teoremi di
garantire la convergenza di successioni complicate, ricorrendo a successioni a loro asintotiche,
magari molto più semplici.
Esempio: Come dimostreremo più avanti, nel caso delle funzioni, vale il seguente limite:
1
sen
n 1
lim
n
1
n
Possiamo riscrivere questo limite nel modo seguente:
1 1
sen
n n
In altre parole, se x n y n allora all’infinito, si comportano allo stesso modo.
Per le successioni asintotiche, infine, valgono le seguenti proprietà degli o – piccoli:
se xn yn allora o( x n ) o( y n )
se xn yn allora x n y n o( y n )
21
Scrittura fuori dal limite
Mettendo insieme le nozioni di o – piccolo e di asintotico, ricorrendo all’ultima proprietà illustrata
nel precedente paragrafo, possiamo introdurre la scrittura fuori dal limite:
Def.: Siano x n e y n due successioni reali e sia y n 0 . Se
x
lim n con
n y
n
Allora vale la seguente scrittura:
x n y n o( y n )
Infatti, se vale nlim
xn
con , allora vale anche che:
yn
x
1
lim n 1
n y n
ma allora:
xn
1 xn
lim
1
n
y n n y n
lim
Quindi vale che
xn
yn
Ma dall’ultima proprietà del precedente paragrafo, ricaviamo che:
xn y n x n y n o( y n ) e per le proprietà degli o – piccoli:
y n o( y n ) y n o( y n )
1
Esempio: dalla relazione sen
n
1
ricaviamo che
n
1 1
1
sen o
n n
n
1 1
Cosa rappresenta l’o – piccolo allora? Ebbene, affermare che sen
significa dire che
n n
1
1
1 1
1
sen è “circa uguale” a
definitivamente. Ma allora la scrittura sen o viene letta
n
n
n n
n
1
1
come “all’infinito posso approssimare la successione sen con la successione , perché le due
n
n
successioni sono molto simili per n molto grande (sono infatti asintotiche). Ma approssimando la
1
1
1
successione sen con commetto un errore che tende a 0 più rapidamente di ”.
n
n
n
In altre parole l’o – piccolo è l’errore che si commette approssimando una successione con una
successione asintotica.
22
Capitolo 4 – Serie numeriche
In questo capitolo studiamo ciò che accade quando si vuole sommare gli infiniti termini di una
successione qualsiasi. Per descrivere il concetto di “somme infinite”, occorreranno delle premesse
che solitamente vengono insegnate nel corso degli anni antecedenti al quinto, che in ogni caso
riprenderò a seguire, e in concetto di limite di successioni, esposto nel capitolo precedente.
Progressioni aritmetiche
Consideriamo un numero reale a qualsiasi e un numero reale d. Ci proponiamo di studiare la
progressione che ha come primo termine a 1 e come ragione d, ovvero, andremo a considerare
tutti i valori nella forma: a 1 + bd.
La sequenza finita dei termini a 1 , a 1 + d, a 1 + 2d, a 1 + 3d, …, a 1 + nd è detta
progressione aritmerica di ragione d e primo termine a 1 .
Esempio: i seguenti sono i primi quattro termini della progressione aritmetica di primo termine
√ 2 e ragione 3:
a 1= √ 2
a 2= √ 2+3
a 3=√ 2+6
a 4= √ 2+9
La ragione in una progressione aritmetica si indica con la lettera d poiché è l'iniziale della parola
“differenza”, ovvero d è la costante che si ottiene eseguendo la sottrazione a n−a n−1 .
E' chiaro che possiamo calcolare il termine n – esimo di una progressione aritmetica, conoscendo un
termine qualunque e la ragione:
a 2=a1+d
a 3=a 2+d =a1 +2d
a 4=a 3+d =a 2+2d =a 1+3d
a n=a n−1+d =a k +(n−k ) d (∀ k )
Data una progressione aritmetica di primo termine a e ragione d, possiamo sommarne i primi n
termini. Quello che si ottiene è il seguente teorema:
Teorema: Siano a 1 , ... , a n i primi n termini di una progressione aritmetica di ragione d. La
somma dei suddetti termini vale:
(a 1+a n) n
n( n−1)
S n=a 1+...+an = ∑ ai = na 1+
d =
2
2
i=1,... ,n
n(n−1)
d per induzione su n: per n = 1 la formula è
2
vera. Infatti: S 1=1a 1+0d=a 1 . Supponiamola vera per n – 1 e dimostriamola per n.
Se la formula vale per n – 1 allora deve essere vera:
Dim: Dimostriamo la formula S n=na 1+
S n−1=(n−1) a 1+
23
(n−1)(n−2)
d
2
A questo punto sappiamo che S n=S n−1+a n , ovvero:
S n=( n−1) a1 +
(n−1)(n−2)
d +a n
2
Scriviamo a n=a 1+(n−1) d e otteniamo:
(n−1)(n−2)
S n=(n−1)a1 +
d +a 1+(n−1) d
2
Facendo i calcoli:
( n−1)(n−2)
n−2
a 1+(n−1)a 1+
d +(n−1) d = a 1 (n−1+1)+(n−1)d (
+1)
2
2
n
na 1+( n−1) d
2
Cioè la tesi.
Cvd
Definiamo infine la media aritmetica tra due elementi di una progressione aritmetica come la loro
semisomma:
a +a j
M (a k , a j )= k
2
Progressioni geometriche
Sia a 0 un numero reale. Si chiama progressione geometrica di primo termine a 0 e di ragione
q, la sequenza finita:
a 0 , a 0 q , a 0 q 2 , a 0 q3 , …, a 0 q n
ove è costante il rapporto, ovvero il quoziente, tra un termine e il suo precedente. La costante vale
proprio q e per questo viene chiamata così (la parola ragione deriva dal latino ratio, che significa
rapporto e q è l'iniziale della parola “quoziente”).
In pratica, si sceglie un primo termine a 0 e i successivi termini si ottengono moltiplicando il
precedente per q, sicché:
a 1=a 0 q
2
a2 =a 1 q=a 0 q
2
3
a 3=a2 q=a1 q =a 0 q
a n=a n−1 q=a j qn− j
Ancora una volta siamo in grado di calcolare la somma dei primi n termini di una progressione
geometrica di ragione q e vale il seguente teorema:
Teorema: Siano a 0 , ... , a n−1 i primi n termini di una progressione aritmetica di ragione d. La
loro somma vale:
1−qn
S n=a 0
1−q
Dimostrazione: Consideriamo a 0 , ... , a n−1 i primi n – 1 termini della progressione geometrica in
questione, la loro somma vale:
S n=a 0+...+a n−1=a0 +a 0 q+a 0 q2+...+a 0 q n−1
Moltiplicando ambo i membri per q si ottiene:
2
3
n
S n q=a 0 q+a 0 q +a 0 q +...+a 0 q
24
Sottraendo la prima equazione alla seconda, si ottiene:
2
n−1
2
3
n−1
n
S n−S n q=a 0+a0 q+a0 q +...+a 0 q −a 0 q−a 0 q −a 0 q −...−a 0 q −a 0 q
Quasi tutti i termini si semplificano, ciò che resta è:
S n−S n q=a 0−a 0 q n
Da cui la tesi:
1−qn
n
S n (1−q)=a 0 (1−q )→ S n=a 0
1−q
Cvd
Definiamo infine media geometrica tra due termini di una progressione, la quantità:
√ ak a j
.
Dalle somme finite alle somme infinite
Con le progressioni ci siamo posti il problema (e lo abbiamo risolto) di determinare la somma dei
primi n termini. Consideriamo ora una qualunque successione reale {x n } . Definiamo somma
parziale la somma dei primi k termini di tale successione:
S 1= x1
S 2 =x 1+x 2
S 3= x 1+x 2+ x3
k
S k =x 1+x 2+...+x k =∑ xi
i=1
Al variare di k si forma una successione delle somme parziali.E chiaramente, all'aumentare di k si
ha che aumentano i termini sommati.
Tuttavia, abbiamo sempre parlato di somme di una quantità finita di addendi. Ci serve allora uno
strumento in grado di permetterci di estendere la definizione di somma anche ad un'infinità di
addendi. Da questo punto di vista, tale strumento già lo conosciamo: i limiti di successioni.
Possiamo allora dare significato alla scrittura:
+∞
k
i=1
i=1
∑ x i :=klim
∑ xi
→+∞
Ovvero, definiamo una serie numerica come il valore di tendenza della successione delle somme
parziali.
Così come per le successioni, diciamo che:
k
Def.: Una serie numerica si dice convergente se esiste finito il limite
lim
∑ xi
k →+∞ i=1
e si dice
divergente se esiste infinito lo stesso. Una serie numerica si dice oscillante se non esiste il
suddetto limite.
+∞
Esempio: La serie
∑ (−1)n
n=0
+∞
è una serie oscillante. La serie
∑n
è ovviamente divergente,
n=1
poiché la somma di tutti i numeri naturali tende all'infinito man mano che aggiungo addendi.
Ci servono, tuttavia, alcuni esempi di serie convergenti. All'inizio può sembrare strano che una serie
possa convergere, ma non è così scontato.
Esempio: La serie
+∞
∑
n=0
25
n
( )
1
10
è convergente; si pensi alle somme parziali:
S 0=1
S 1=1+0,1=1,1
S 3=1+0,1+0,01=1,11
...
S 10=1,1111111111
e così via... appare chiaro che la serie converge al valore 1, ̄1 =
10
.
9
Ci occorrono quindi criteri atti a determinare la regolarità di una serie, cioè per stabilire quando una
serie converge o diverge.
Serie geometriche
Sulla base della definizione di progressione geometrica e di somma dei primi n termini di una
progressione geometrica, ci proponiamo ora di sommare, quando possibile, gli infiniti termini di
una “progressione” geometrica di ragione q e primo termine a 0 .
Sappiamo già che per sommare i primi n termini di una progressione geometrica di ragione q e
primo termine a 0 basta applicare la formula:
n
1−q
S n=a 0
1−q
Allora non ci resta che applicare la definizione di serie:
+∞
1−q n
S n= lim a 0
∑ a 0 q n= nlim
1−q
→+∞
n →+∞
n=0
n
1−q
Notiamo che lim a 0
converge se e solo se converge la successione q n . D'altronde
1−q
n →+∞
sappiamo che un'esponenziale di questo tipo può tendere a 0 o divergere, dipendentemente dal
valore della base q. Si ha allora il seguente risultato:
+∞
Teorema di convergenza della serie geometrica: La serie
∑ a0qn
ha il seguente carattere:
n=0
•
•
•
Converge se ∣q∣<1
Diverge se q⩾1
Oscilla se q⩽−1
Dimostrazione: Segue dal fatto che le esponenziali convergono se la loro base è compresa tra 0 e 1,
divergono se è maggiore di 1 e oscillano altrimenti.
Cvd
n
+∞
1
L'esempio ∑
rende esattamente l'idea di una serie geometrica convergente.
10
n=0
( )
26
Condizioni necessarie e sufficienti per la convergenza di una serie
Una condizione necessaria, ma purtroppo non sufficiente, per la convergenza di una serie, è che il
termine generale della successione che la genera tenda a 0. In caso contrario, la successione delle
somme parziali non può convergere ad alcun numero, poiché sarebbe come sommare infinite volte
un numero relativamente grande. Sostanzialmente, è la stessa cosa che succede con le “serie
aritmetiche”: sommando in continuazione termini molto grandi si ottiene un infinito.
+∞
Teorema: Sia
∑ xi
xi → 0
una serie. Se essa converge, allora
i=1
per i →+∞ .
+∞
Un esempio di serie che diverge nonostante il termine generale tenda a 0 è la seguente:
1
∑i
nota
i=1
come serie armonica.
Inoltre, si ha una condizione solo sufficiente per la convergenza di una serie, ovvero la sua
convergenza assoluta, ovvero:
+∞
Teorema: Sia
∑ xi
i=1
+∞
∑ xi
+∞
una serie. Se la serie
∑∣xi ∣
è convergente, allora converge anche
i=1
.
i=1
(−1)i
∑ i converge, ma diverge
i=1
+∞
Anche questa volta non vale il viceversa. Infatti, la serie
assolutamente come visto nell'esempio precedente.
Serie a termini positivi e criteri di convergenza per esse
+∞
Una serie
∑ xi
i=1
tale che
x i⩾0 per ogni i è detta serie a termini positivi. In questo caso, le
somme parziali costituiscono una successione monotona non descrescente. Infatti, essendo ogni
termine generale positivo, si ha che la differenza tra due termini della successione delle somme
parziali è:
S k +1−S k =x k+1⩾0
Pertanto, una serie a termini positivi può solo convergere o divergere. Cioè può solo essere regolare.
Quindi, una serie a termini positivi converge se la successione delle somme parziali è superiormente
limitata, diverge altrimenti.
Per le serie a termini positivi valgono dei comodi criteri che permettono di stabilirne la
convergenza. Il primo di questi criteri è simile ad un criterio già incontrato per le successioni:
+∞
Criterio del confronto per serie: Siano
∑ xi
i=1
27
+∞
e
∑ yi
i=1
due serie a termini positivi tali che
per ogni i si abbia:
Se:
x i⩽ yi
+∞
•
+∞
∑ yi
converge, allora converge anche
∑ xi
diverge, allora diverge anche
i=1
+∞
•
+∞
i=1
∑ xi
;
i=1
∑ yi
.
i=1
Per le serie vale anche una variante del criterio del confronto, nota come:
+∞
Criterio del confronto asintotico: Siano
∑ xi
i=1
+∞
e
∑ yi
due serie a termini positivi tali che
i=1
x i sia asintotica a y i .
Le due serie hanno lo stesso carattere.
+∞
Esempio: la serie
( )
∑ ln 1+
i=1
1
i
( )
diverge, in quanto ln 1+
1
i
è asintotica a
1
i
+∞
e
1
∑i
i=1
diverge.
Altri criteri per la convergenza di serie a termini positivi sono:
+∞
Criterio della radice: Sia
∑ xi
una serie a termini positivi ed esista
i=1
n
xn
√
n →+∞
α= lim
.
Se:
•
0⩽α<1 allora
+∞
∑ xi
converge;
i=1
•
Se 1<α⩽+∞ allora essa diverge.
E
+∞
Criterio del rapporto: Sia
∑ xi
una serie a termini positivi ed esista
i=1
α= lim
n →+∞
x n+1
.
xn
Se:
•
0⩽α<1 allora
+∞
∑ xi
converge;
i=1
•
Se 1<α⩽+∞ allora essa diverge.
Si badi che i teoremi non garantiscono né la convergenza né la divergenza per il caso a = 1.
Il seguente criterio, invece, è utile per determinare la convergenza di serie a termini positivi il cui
termine generale sia decrescente:
28
+∞
Criterio di condensazione: Sia
una serie a termini positivi e sia
N=1
+∞
+∞
∑ xN
Allora le due serie
∑ xN
e
N=1
∑ 2N x2
N
x n+1⩾x n ∀ n⩾1 .
.
N=0
Ed infine, possiamo fornire delle funzioni campione per la convergenza delle serie:
+∞
La serie
1
∑ n p ln n q
ha il seguente carattere:
n=1
•
•
•
Converge sempre a patto che p sia maggiore strettamente di 1.
Se p = 1 allora entra in gioco il ruolo di q e la serie converse solo se q è strettamente
maggiore di 1.
In tutti gli altri casi diverge.
+∞
Esempio: La serie di Mengoli:
1
∑ n (n+1)
converge poiché l'esponente di n è 2. Infatti,
n=1
k
k
1
1
1
=∑ −
, da cui:
n−1
n=1 n(n+1)
n=1 n
k
1
1
1 1 1 1 1
1
1
1
S k =∑ −
=1− + − + − +...+ −
=1−
n−1
2 2 3 3 4
k k −1
k−1
n=1 n
Questa è una serie a termini positivi e la successione delle somme parziali tende a 1 per n
tendendente all'infinito.
possiamo scrivere le somme parziali come: S k =∑
Operazioni con le serie e cenni sulle serie a segni alterni
Concludiamo il capitolo con un accenno alla somma, al prodotto di serie e alle proprietà di cui
godono.
+∞
Banalmente, la somma tra due serie
∑ xi
i=1
+∞
e
∑ yi
+∞
è definita come la serie
i=1
∑ xi + yi
le cui
i=1
somme parziali non sono altro che la somma tra le somme parziali delle due serie addendi. Se non si
presenta il caso di indecisione ∞−∞ la somma di serie regolari è regolare.
Il prodotto di serie è molto più complicato e pertanto lo salteremo, mentre, se una serie numerica
converge assolutamente, allora anche ogni permutazione di tale serie converge alla stessa somma.
+∞
La proprietà dissociativa NON è valida per le serie. Infatti, la serie
∑ 0=0+0+0+...+0+...
i=1
banalmente convergente a 0 risulterebbe oscillante applicando la proprietà dissociativa e scivendo
ogni 0 come 1 – 1:
+∞
0+0+...+0+...=(1−1)+(1−1)+...+(1−1)+...=∑ (−1)
i
i=0
La proprietà associativa vale per le serie regolari. Per le serie oscillanti no. Infatti, se così non fosse,
1−1+1−1+...+1−1+...=1+1+1+1+1+1+...+1−1−1−1−1−...−1−... → ∞−∞
Per le serie a segni alterni esiste un criterio di convergenza noto come criterio di Leibniz, che
afferma che data una serie a segni alterni del tipo ∑ (−1)i x i , se x i è a termini positivi, è
decrescente e dende a 0, allora la serie a segni alterni converge.
29
Capitolo 5 – Limiti di funzioni
Nel precedente capitolo abbiamo introdotto le successioni come particolari funzioni di variabile
naturale e abbiamo prestato particolare attenzione alle successioni a valori reali e alla loro
regolarità. Ora ci occupiamo invece di limiti, ma questa volta applicheremo il concetto alla totalità
delle funzioni reali di variabile reale.
Per esempio, lavorando con le successioni gli unici limiti su cui aveva senso indagare erano i limiti
per n . Ora, invece, come mostrano i seguenti esempi, ci preoccuperemo dei limiti in un caso
più generale:
Esempio: la funzione f ( x) x 2 . Ci chiediamo cosa succede a f per x 1 . Attenzione, chiedersi
cosa succede a f per x 1 non significa chiedersi cosa vale f in x 1 , ma bensì a che valore
tende f ( x) x 2 per x 1 (come poi vedremo quando definiremo il concetto di limite di funzioni),
cioè:
lim x 2 1
x 1
Chiaramente, poiché f (1) 12 1 la funzione tende a 1 per x 1 , ma solo perché, come vedremo
nel capitolo successivo, f è continua in x 1 .
Allora è lecito porsi la domanda “cosa succede se f (1) 1 . Cioè, andiamo a considerare la
x 1
x 2
funzione f ( x) per
. Questa funzione è identica alla precedente, ma f (1) 3 1 .
x 1
3
È spontaneo allora affermare che:
lim x 2 3
x 1
Ma ciò è falso! È ovvio che f (1) 3 , ma quando svolgiamo un limite, non siamo interessati al
valore che la funzione assume in 1, ma a quale valore la funzione si AVVICINA quando x 1 . E
anche se f (1) 3 , la funzione si avvicina a 12=1, come mostra il grafico:
30
Sulla base di questo esempio definiamo allora il concetto di limite di una funzione ad un valore
finito per x che tende ad un valore finito:
Def.: Sia f : D (D è il dominio di f ). Sia x0 D (cioè x0 è di accumulazione per D) e
sia L .
Diremo che f tende a L per x che tende ad x0 , e si scrive:
lim f ( x ) L
x x0
Se 0 0 tale che x D tale che 0 x x0 f ( x) L
O analogamente:
Se U (L) U ( x0 ) tale che x U ( x0 ) D con x x 0 f ( x) U ( L) .
Come si nota facilmente, nella definizione è esplicitato che x x0 . Cioè, non è importante come la
funzione si comporti effettivamente x0 . Questo spiega l’esempio precedente.
Altri esempi sono:
1 1
sen( x ) 0 , lim tg ( x) 0
x 2 , lim
, lim
x 0
x 0
x4 x
4 x2
1
Analogamente, la funzione per x 0 . In tal caso occorre dare una definizione di limite di
x
una funzione ad un valore infinito per x tendente ad un valore finito:
notiamo che la seconda formulazione del concetto di limite, sebbene è equivalente alla precedente, è
più “generale”: “ U (L) U ( x0 ) tale che x U ( x0 ) D con x x 0 f ( x) U ( L) ”.
Possiamo allora definire questi nuovi limiti sulla base di questa definizione:
Def.: Sia f : . E sia L .
Diremo che f tende a L per x che tende a + infinito, e si scrive:
lim f ( x) L
lim
x
Se U (L) U () tale che x U () con x x 0 f ( x) U ( L) .
Analogamente è possibile esplicitare gli intorni e ottenere:
0 M 0 tale che x tale che x M , x x 0 f ( x) L .
In modo analogo si definisce la tendenza a – infinito: diremo che f tende a L per x tendente
a – infinito e si scrive:
lim f ( x) L
x
Se U (L) U () tale che x U () con x x 0 f ( x) U ( L) .
Analogamente è possibile esplicitare gli intorni e ottenere:
0 M 0 tale che x tale che x M , x x0 f ( x) L .
In generale diremo che f tende a L per x tendente all’infinito e si scrive:
lim f ( x) L
x
Se U (L) U () tale che x U () con x x 0 f ( x) U ( L) .
Analogamente è possibile esplicitare gli intorni e ottenere:
0 M 0 tale che x tale che x M , x x 0 f ( x ) L .
31
Esempio:
lim
x
1
1
lim
0
lim
artg
(
x
)
lim
artg
(
x
)
,
,
,
0
2
x 4 x
x
2 x
2
ex
Ora, definiamo invece il limite di una funzione ad un valore infinito per x che tende ad un
valore infinito:
Def.: Sia f : .
Diremo che f tende a + infinito per x che tende a + infinito, e si scrive:
lim f ( x)
x
Se U () U () tale che x U () f ( x) U () .
Analogamente è possibile esplicitare gli intorni e ottenere:
N 0 M 0 tale che x tale che x M f ( x) N .
Diremo che f tende a – infinito per x tendente a + infinito e si scrive:
lim f ( x)
x
Se U () U () tale che x U () f ( x) U () .
Esplicitando gli intorni:
N 0 M 0 tale che x tale che x M f ( x) N .
In maniera identica potete definire i limiti per x tendente a – infinito.
In generale diremo che f tende all’infinito per x tendente all’infinito e si scrive:
lim f ( x)
x
Se U () U () tale che x U () f ( x ) U () .
Analogamente è possibile esplicitare gli intorni e ottenere:
N 0 M 0 tale che x tale che x M f ( x) N .
Esempio:
1
1
in quanto non possiamo specificare a quale infinito tende
(infatti tende ad un infinito
x x
x
negativo per x tendente ad un infinito negativo e ad un infinito positivo per x tendente ad un infinito
positivo.
È chiaro, comunque, che, per essere più precisi, si può scrivere:
lim
x
1
per
x x
x
lim
Ma così come possiamo esplicitare la tendenza all’infinito alla tendenza a + o a – infinito, possiamo
analogamente esplicitare la tendenza per x che tende ad un valore finito dalla destra o dalla sinistra
ad un valore finito dall’alto o dal basso. Cioè possiamo definire i seguenti limiti:
lim f ( x) L , lim f ( x) L , lim f ( x) L e lim f ( x) L . Queste definizioni sono lasciate
x x0
x x0
x x0
x x0
per esercizio. Osserviamo che occorre semplicemente modificare la definizione generale: U (L)
32
U ( x0 ) tale che x U ( x0 ) D con x x 0 f ( x) U ( L) …
Funzioni limitate ed estremanti
Andiamo ad introdurre alcuni concetti che ci porteremo dietro per tutto il resto del corso di Analisi
Matematica.
Def.: Sia f : D . f si dice limitata (risp. limitata superiormente, inferiormente) in D se
l’insieme immagine f(D) è limitato (risp. limitato superiormente, inferiormente).
Si dice che è l’estremo superiore (risp. è l’estremo inferiore) di f (x) su D se
(risp. ) è l’estremo superiore (risp. l’estremo inferiore) dell'insieme f(D).
Si dice, allora, che f (x) ha massimo in D (che f (x) ha minimo in D) se f (D) ha massimo (risp.
minimo).
Chiamiamo M e m rispettivamente il massimo e il minimo di una funzione in D e vengono anche
chiamati massimo assoluto e minimo assoluto di f in D.
Ogni punto x0 D tale che f ( x 0 ) M (risp. f ( x 0 ) m ) si chiama punto di massimo assoluto
(risp. minimo assoluto) di f in D. In generale, i punti di massimo e di minimo sono detti
estremanti.
Chiaramente, valgono le relazioni:
Se x0 D è massimo assoluto, allora x D si ha f ( x) f ( x 0 ) .
Se x0 D è minimo assoluto, allora x D si ha f ( x) f ( x0 ) .
Esempio: La funzione f ( x ) sen( x) è limitata (sia superiormente che inferiormente), poiché
1 f ( x ) 1 . Si dice allora che l’estremo superiore di f in è 1 e l’estremo inferiore di f in
-1. Cioè:
sup f(x) = 1 = max f(x)
inf f(x) = -1 = min f(x)
è
Analogamente, su tutto , i punti in cui la funzione seno assume il valore 1 (cioè tutti i punti del
tipo x 2k ) sono punti di massimo assoluti e i punti in cui la funzione seno assume il valore
2
-1 (cioè tutti i punti del tipo x 2k ) sono punti di minimo assoluto per f in .
2
Invece, per la funzione f ( x)
sen( x)
, come dimostreremo poi, vale il seguente limite:
x
sen( x)
1 e chiaramente è il massimo valore che la funzione in questione può raggiungere.
x
Tuttavia, in questo caso, poiché 0 non si trova nel dominio della funzione, per nessun valore di x si
sen( x)
1 , quindi, è vero che:
ha
x
lim
x 0
33
sup
sen( x)
1
x
sen( x)
, allora, 1 non è massimo per questo insieme. Difatti, non esiste alcun
ma poiché 1 f
x
punto di massimo per f , poiché se esistesse, questo dovrebbe coincidere con 0 (che però non sta nel
dominio…).
sen( x)
x0
Invece, se “prolungo per continuità f ”, cioè se pongo f ( x) x
per
, allora risulta,
x0
1
come potremo verificare, che f è “continua” su tutto l’asse reale e risulta anche:
sen( x )
lim
1 f (0)
x 0
x
Pertanto, in questo caso, vale che
sen( x)
sen( x )
max
sup
x
x
Nell’immagine qui sotto, il grafico della funzione in questione:
Teorema del confronto per i limiti di funzione
Come abbiamo già visto per i limiti di successioni, vale il criterio del confronto (o teorema dei
carabinieri) anche per le funzioni. Naturalmente, occorrerà fare dei piccoli accorgimenti sulle
ipotesi del teorema, per renderlo compatibile con il concetto di funzione e quello di limite.
Teorema del confronto, limite finito: Siano f, g, h : D
seguenti ipotesi:
1. lim f ( x) lim h( x ) L
x x0
. Sia x0 D . Valgano le
x x0
2. esiste un intorno circolare di x0 tale che per ogni x U ( x 0 ) D , con x x 0 , valga
f ( x ) g ( x ) h( x ) .
Allora possiamo concludere che anche lim g ( x) L .
x x0
Dimostrazione: La dimostrazione è una semplice conseguenza della definizione di limite.
34
f ( x) lim h( x ) L ove L è un numero reale, allora possiamo dire che
Se xlim
x0
x x0
1. 0 0 tale che x D tale che 0 x x0 L f ( x) L
2. 0 0 tale che x D tale che 0 x x0 L h( x) L
Allora se si fissa un certo 0 chiamiamo f e h rispettivamente i relativi alla convergenza
di f e h.
Allora, basti prendere g min( f , h ) . Per questo valore valgono contemporaneamente:
1. x D tale che 0 x x0 g L f ( x ) L
2. x D tale che 0 x x0 g L h( x) L
E quindi, poiché f ( x ) g ( x) h( x) , otteniamo:
3. x D tale che 0 x x0 g L f ( x ) g ( x) h( x) L , da cui segue
immediatamente: L g ( x) L , cioè l’appartenenza di g ad un intorno di L.
Cvd
Teorema del confronto, limite infinito: Siano f, g : D . Sia x0 D . Se vale la
seguente ipotesi:
esiste un intorno circolare di x0 tale che per ogni x U ( x 0 ) D , con x x 0 , valga
f ( x ) g ( x) .
Allora possiamo concludere che:
1. Se lim f ( x) allora anche lim g ( x) .
x x0
x x0
g ( x) allora anche lim f ( x)
2. Se xlim
x0
x x0
Grazie a questi due teoremi potremo calcolare più facilmente molti limiti, tra cui i limiti notevoli,
che calcoleremo nel successivo paragrafo.
Limiti notevoli
I seguenti limiti presentano forme di indeterminazione e, pertanto, necessitano di un metodo
secondario per essere risolti:
Limite notevole del seno: Vale il seguente limite
sen( x)
lim
1
x 0
x
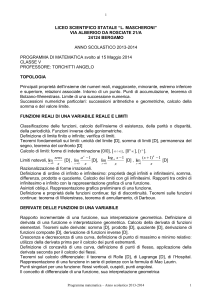
Dimostrazione: Dimostriamo il teorema per x 0, , la disparità della funzione seno garantisce
2
la validità del teorema per ogni x reale.
35
Consideriamo la circonferenza goniometrica e un
angolo x al centro. La misura del segmento DE
è il seno dell’angolo x , mentre il segmento CF
rappresenta la tangente di x . L’arco di
circonferenza DF , invece, per definizione di
angolo in radianti, misura proprio x .
Evidentemente, vale la seguente disuguaglianza:
sen( x) x tg ( x)
Esplicitiamo la tangente:
sen( x )
sen( x) x
cos( x)
Ci stiamo interessando a cose succede quando x 0 . Intorno a quei valori, il seno non misura 0,
poiché, per definizione di limite, deve essere x 0 ed è quindi sen( x) 0 . Possiamo, allora,
dividere tutto per il sen(x):
x
1
1
sen( x) cos( x )
Poiché ci troviamo nel primo quadrante, seno, angoli e coseno sono positivi. Ci troviamo allora di
fronte ad una disuguaglianza tra quantità positive. Allora, quando passiamo ai reciproci, cambiamo
il verso della disequazione:
sen( x)
1
cos( x)
x
Passiamo al limite:
sen( x )
lim1 lim
lim cos( x)
x 0
x 0
x 0
x
Cioè:
sen( x)
1 lim
1
x 0
x
La tesi segue dal criterio del confronto. In realtà, si dimostra che il limite tende a 1-.
Cvd
Corollario – Limite notevole del coseno: Vale il seguente limite
1 cos( x ) 1
lim
x 0
x2
2
Dimostrazione: Questo limite presenta una forma di indeterminazione
0
, ma è facile risolverlo
0
utilizzando il teorema precedente sul Limite notevole del seno.
1 cos( x)
1 cos( x ) 1 cos( x)
1 cos 2 ( x)
sen 2 ( x )
lim
lim
lim
lim
x 0
x 0
1 cos( x) x 0 x 2 (1 cos( x)) x 0 x 2 (1 cos( x ))
x2
x2
2
2
1
1
1 1
sen( x)
sen( x)
lim
lim
lim
12
x 0
2 2
x 1 cos( x ) x 0 x x 0 1 cos( x )
Cvd
36
Limite notevole di e #1: Vale il seguente limite
x
1
lim 1 e
x
x
Limite notevole del logaritmo: Vale il seguente limite
log a (1 x)
lim
log a e
x 0
x
Dimostrazione: Dimostriamo solo il secondo limite.
1
log a (1 x)
ln(1 x)
ln(1 x)
lim
lim
log a e lim
log a e lim ln 1 x x
x 0
x 0
x 0
x 0
x
x ln e
x
1
Notiamo che se x tende a 0,
tende all’infinito:
x
1
ln(1 x)
log a e lim
log a e lim ln 1 x x
x 0
1 / x 0
x
1
Ponendo t evidenziamo il limite di e:
x
t
1
1
log a e lim ln1 x x log a e lim ln1 log a e lim ln e log a e
1 / x 0
t 0
t 0
t
Cvd
In questa dimostrazione abbiamo dimostrato “a tavolino”:
Limite notevole di e #2: Vale il seguente limite
1
lim1 x x e
x 0
Infine:
Limite notevole di un’esponenziale: Vale il seguente limite
a x 1
lim
ln a con a>0
x 0
x
0
.
0
Poniamo t a x 1 . Se t a x 1 allora ricaviamo x log a (t 1) .
Inoltre, se x 0 allora anche t 0 e otteniamo:
1
a x 1
t
log a (1 t )
1
lim
lim
lim
log a e ln a
x 0
t 0 log (1 t )
t 0
x
t
a
Dimostrazione: Il limite presenta una forma di indecisione
Cvd
Riassumiamo quanto dimostrato, aggiungendo degli utili casi particolari (conseguenze) e il caso
generale:
37
Limite notevole
sen( x)
lim
1
x 0
x
1 cos( x ) 1
lim
x 0
x2
2
x
Limite generale
senf ( x)
lim
1
f ( x ) 0
f ( x)
1 cos f ( x) 1
lim
f ( x ) 0
2
f ( x) 2
f ( x)
1
lim 1 e
x
x
log a (1 x)
lim
log a e
x 0
x
1
lim 1
e
f ( x )
f ( x)
log a (1 f ( x ))
lim
log a e
f ( x ) 0
f ( x)
a x 1
ln a
x 0
x
a f ( x) 1
ln a
f ( x )0
f ( x)
lim
lim
Conseguenza
tgf ( x )
lim
1
f ( x ) 0 f ( x )
1 cos( x)
lim
0
x 0
x
1
lim1 a x x e a
x 0
ln(1 x)
1
x 0
x
lim
ex 1
1
x 0
x
lim
Funzioni infinite e funzioni infinitesime
In modo naturale possiamo estendere la nozione di “infinito” e “infinitesimo” anche al caso delle
funzioni.
Def.: Sia f : D e sia x0 D . Se
lim f ( x ) allora si dice che f è un infinito per x x0 ;
x x0
lim f ( x ) 0 allora si dice che f è un infinitesimo per x x0 .
Siano f , g : D due funzioni reali di variabile reale definite in un dominio D, intervallo
reale. Siano f e g infinite e sia x0 D .
f ( x)
0 allora si dice che f(x) è un infinito di ordine inferiore rispetto a g(x) per
Se xlim
x0 g ( x )
x x0 e si scrive: f ( x) g ( x )
Se invece il limite è infinito, allora si dice che f(x) è un infinito di ordine superiore rispetto a g(x)
per x x0 .
Siano f , g : D due funzioni reali di variabile reale definite in un dominio D, intervallo
reale. Siano f e g infinitesime e sia x0 D .
f ( x)
0 allora si dice che f(x) è un infinitesimo di ordine superiore rispetto a
Se xlim
x0 g ( x )
g(x) per x x0 .
Se invece il limite è infinito, allora si dice che f(x) è un infinitesimo di ordine inferiore rispetto a
g(x) per x x0 .
x x0
Esempio: La funzione logaritmica è un infinitesimo per x 1 , mentre la stessa funzione è un
infinito per x . Le funzioni esponenziali la cui base è maggiore di 1, sono infiniti per
x , mentre le esponenziali con base compresa tra 0 e 1 sono infinitesime per x .
Analogamente al caso delle successioni, definiamo un ordine tra infiniti che ci sarà utile nella
risoluzione dei limiti: tutte le seguenti funzioni sono infiniti per x .
log a x , x per 1 , a x per 1 , x! e x x
Con le condizioni sopra elencate, vale il seguente risultato che esplicita l’ordine di infinito.
38
o – piccolo e asintotico
In egual modo possiamo estendere la nozione di o – piccolo anche per le funzioni reali di variabile
reale. Idem per la nozione di asintotico.
Def.: Siano f , g : D due funzioni reali di variabile reale definite in un dominio D,
intervallo reale. Sia g ( x) 0 e sia x0 D .
f ( x)
0 allora si dice che f(x) è un o – piccolo di g(x) per x x0 e si scrive:
Se xlim
x0 g ( x )
f ( x) o( g ( x)) per x x0
Le proprietà degli o – piccoli valenti sono le stesse che valgono per gli o – piccoli nel caso delle
successioni.
Analogamente:
Def.: Siano f , g : D due funzioni reali di variabile reale definite in un dominio D,
intervallo reale. Siano f ( x) 0 e g ( x) 0 , in modo tale da non avere una forma di indecisione e
sia x0 D .
f ( x)
1 allora si dice che f(x) è asintotica a g(x) per x x0 e si scrive:
Se xlim
x0 g ( x )
f (x) g(x) per x x0
Da notare la presenza della clausola “ x x0 ” in ognuna di queste definizioni. Essa era banalmente
assente nelle definizioni analoghe date per le successioni perché era sottinteso che, in quel caso,
n , poiché quello era l’unico limite che ci interessava studiare nel caso delle successioni.
Mettendo insieme la nozione di o – piccolo con quella di asintotico si arriva, come nel caso delle
successioni, alla nozione di scrittura fuori dal limite.
Scrittura fuori dal limite per le funzioni
Il fatto che due funzioni siano asintotiche per x x0 significa che per x x0 le due funzioni
“sono molto simili” o “si confondono” l’una con l’altra (i termini tra virgolette non sono termini
matematicamente corretti). Quindi, se due funzioni sono asintotiche, significa che è possibile
approssimare l’una usando l’altra (in un intorno di x0 ) commettendo un errore che esprimeremo
usando gli o – piccoli. Questo concetto è simile alla scrittura fuori dal limite per le successioni:
Prendiamo allora due funzioni reali di variabile reale asintotiche f (x)
f ( x)
1.
Allora vale, per definizione, il limite xlim
x0 g ( x )
g(x) per x x0 .
f ( x)
e y 1 “si
g ( x)
confondono”, cioè sono prossime l’una all’altra. L’errore che commettiamo approssimando
Ciò significa che in un intorno sufficientemente piccolo di x0 , le funzioni y
39
f ( x)
con la retta orizzontale y 1 per x x0 è un o – piccolo di 1, scriveremo cioè:
g ( x)
f ( x)
1 o(1) per x x0
g ( x)
Da cui ricaviamo:
f ( x ) g ( x) o( g ( x)) per x x0 .
y
In generale, diciamo che se: xlim
x
0
f ( x)
con , allora vale:
g ( x)
1
f ( x)
f ( x)
lim
1 lim
1
x x0 g ( x )
x x0 g ( x)
Usando quanto detto sopra, le funzioni f (x) e g (x) sono asintotiche per x x0 , da cui:
f ( x ) g ( x) o( g ( x)) per x x0 .
Grazie alla scrittura fuori dal limite possiamo riscrivere la tabella dei limiti notevoli nel modo
seguente:
Limite notevole
sen( x)
lim
1
x 0
x
1 cos( x ) 1
lim
x 0
x2
2
log a (1 x)
log a e
x 0
x
a x 1
lim
ln a
x 0
x
lim
Scrittura asintotica
x
sen(x)
per x 0
x2
cos(x ) 1
per x 0
2
log a (1 x ) x log a e
per x 0
x
1 x ln a
a
per x 0
Scrittura fuori dal limite
sen( x) x o( x)
per x 0
x2
cos( x ) 1
o( x 2 )
2
per x 0
log a (1 x) x log a e o( x)
per x 0
x
a 1 x ln a o( x)
per x 0
ln(1 x)
ln(1 x)
1 allora possiamo dire che
1 o(1) per x 0 da
x
x
cui ricaviamo: ln(1 x) x o( x) per x 0 . Questo è un caso speciale del terzo limite notevole in
tabella.
Esempio: Poiché vale lim
x 0
x2 4
Esempio: lim
5 che diventa x 2 4 5 x 2 o( x 2 ) per x 1 .
2
x 1
x
Conclusioni
La nozione di limite per x x0 , come abbiamo visto, non coinvolge il valore che la funzione di cui
si studia il limite assume in x x 0 .
Ora ci chiediamo cosa succede se, effettivamente, lim f ( x) f ( x0 ) , cioè introdurremo la nozione
x x0
di continuità.
40
sen( x)
non è definita in x 0 , tuttavia, vale il limite
x
notevole del seno. Questo significa che la funzione seno è discontinua nello 0 (ivi non è definita) e
presenta, come vedremo nel prossimo capitolo, una discontinuità di 3° specie.
Esempio: Come è noto, la funzione y
41
Capitolo 6 – Continuità
La definizione di continuità, in realtà, è una “generalizzazione” del concetto di limite. Dopo averla
enunciata vedremo il perché:
Def.: Sia f : D
e sia x0 D . f si dice continua in x0 se:
0 0 tale che x D tale che x x 0 f ( x) f ( x0 )
O analogamente:
U
(
f
(
x
))
U
(
x
)
se
tale che x U ( x0 ) D f ( x) U ( f ( x 0 )) .
0
0
se U ( f ( x 0 )) U ( x0 ) tale che f (U ( x 0 ) D) U ( f ( x0 ))
Questa definizione è identica alla definizione di limite. L’unica differenza è la mancanza della
clausola x x0 che nella definizione di limite era presente.
Una conseguenza della definizione di limite è questa riformulazione della definizione stessa:
Def.: Sia f : D
e sia x0 D . f si dice continua in x0 se:
lim f ( x) f ( x0 )
x x0
Tutte le funzioni elementari dell’analisi matematica sono continue puntualmente, per ogni punto del
loro dominio. Inoltre, vale il seguente teorema:
Teorema: Sia f : D C e sia x0 D . Sia g: C B . Se f è continua in x0 e
g è continua in f ( x 0 ) , allora la funzione composta ( g ° f )( x) f ( g ( x)) è continua in x0 .
Il concetto di continuità può anche essere esteso alla continuità su un intervallo:
Def.: Sia f : D e sia x0 D . f si dice continua globalmente in D se è continua in ogni
punto di D.
Cioè, f è continua in D se
lim f ( x) f ( x0 ) x0 D
x x0
Per esempio, la funzione f ( x) x è continua su tutto l’asse reale poiché è continua in ogni punto
di . Esiste un teorema che permette di caratterizzare (cioè di fornire un metodo “infallibile” per
riconosce) la funzioni globalmente continue.
42
Teorema di caratterizzazione delle funzioni globalmente continue: Sia f : D .
La funzione f è continua su D se e solo se la controimmagine di ogni intervallo aperto è un
intervallo aperto. Cioè, se:
A (a, b) f 1 ( A) è un intervallo aperto in D.
Analogamente:
La funzione f è continua su D se e solo se la controimmagine di ogni intervallo chiuso è un
intervallo chiuso. Cioè, se:
A a, b f 1 ( A) è un intervallo chiuso in D.
Possiamo anche estendere la nozione di continuità alle funzioni ottenute applicando delle operazioni
tra loro, cioè, vale il seguente risultato:
Teorema: Siano f , g : D . Se Sia f e g sono continue in x0 D allora sono continue in
x0 tutte le seguenti funzioni:
f g
fg
f
se g ( x0 ) 0
g
g
f se f ( x 0 ) 0
log f g se f ( x 0 ) 0 , g ( x0 ) 0 e g ( x0 ) 1
Il teorema di Weierstrass
Enunciamo ora una serie di importanti risultati, quali il Teorema di Weierstrass, che è in realtà un
corollario di un teorema più generale di cui non tratteremo:
Teorema di Weierstrass: Sia f : D .
se D è un intervallo chiuso e limitato
se f è continua in D
Allora f ha un punto di massimo e di minimo assoluti in D.
Se cade una delle due ipotesi, allora cade completamente il senso del teorema. La funzione
f ( x) x 3 , per esempio, definita su tutto l’asse reale è continua su tutto , ma non ha massimi e
minimi su , in quanto il dominio della cubica non è chiuso e limitato. Invece, la funzione
g ( x) x 3 definita solo su [0,1] è ivi continua e ammette massimo in x 1 e minimo in x 0 .
Se invece consideriamo h( x) x 3 , ma questa volta definita su (0,1), allora, ancora una volta cade il
teorema: infatti, i massimi e i minimi di questa funzione sarebbero in x 1 e x 0 , ma 0 e 1 non
stanno nel dominio di h e quindi non sono massimi e minimi.
x [ 3,0)
x 1
La funzione i ( x)
per
invece, non è continua sul suo dominio, poiché non lo è in
x [0,1)
x
x 0 . Il teorema, quindi, non vale per questa funzione, che non presenta punti di massimo e
nemmeno un punto di minimo assoluto nel suo dominio.
43
Il teorema di Bolzano – Darboux
Il teorema che enunceremo adesso è la conseguenza di un altro teorema, parallelo a quello da cui
discende il teorema di Weierstrass, di cui non tratteremo. Da questo teorema e dai suoi due corollari,
discende il termine “continuità”, come risulterà presto evidente.
Teorema di Bolzano – Darboux: Sia f : D continua e non costante su D. Allora f(D) è
un intervallo.
Se D è un intervallo chiuso e limitato, allora f ( D) [m, M ] ove m ed M sono rispettivamente il
minimo e il massimo assunti da f in D.
Il teorema seguente è un corollario del precedente ed è fondamentale per lo studio di funzioni, nel
senso che stabilisce una proprietà importante che possiedono le funzioni continue:
Teorema dei valori intermedi: Sia f : [a, b] continua. Sia f ( a) f (b) (risp.
f (a) f (b) ) . Allora per ogni y 0 ( f (a ), f (b)) (risp. y 0 ( f (b), f (a)) ), esiste un x0 ( a, b)
tale che f ( x 0 ) y 0 .
Dimostrazione: Per esempio poniamo f ( a) f (b) . Allora si ha, per ipotesi:
y 0 ( f ( a), f (b)) [m, M ] f ([a, b])
Quindi, poiché y 0 f ([a, b]) , cioè y 0 appartiene all’immagine di f , deve esistere un punto
x0 ( a, b) in corrispondenza del quale valga f ( x 0 ) y 0 per continuità.
Cvd
Questo teorema è talvolta noto con il termine di Proprietà di Darboux (per la continuità) e
afferma, in sostanza, che ogni funzione continua, definita su un intervallo chiuso e limitato, assume
almeno una volta tutti i valori compresi tra le immagini degli estremi dell’intervallo. Visivamente,
per disegnare tale funzione è obbligatorio non distaccare la penna dal foglio, da qui il termine
“continuità”.
Illustriamo adesso una seconda conseguenza del teorema di Bolzano – Darboux, un corollario della
Proprietà di Darboux per la continuità, di fondamentale importanza, soprattutto per l’analisi
numerica.
Teorema degli zeri: Sia f : [a, b] . Se:
f continua su [a, b] ;
f (a) f (b) 0 (cioè se la funzione passa da sopra a sotto – o viceversa – l’asse x);
Allora esiste almeno un punto x0 (a, b) tale che f ( x 0 ) 0 .
Dimostrazione: Dal teorema precedente, poiché f (a) f (b) 0 allora, per esempio, è f ( a) 0 e
f (b) 0 . Quindi, 0 ( f (a ), f (b)) , per la proprietà di Darboux, poiché f è continua, deve esistere
almeno un punto x0 ( a, b) tale che f ( x 0 ) 0 .
Cvd
Come anticipato, questo teorema è di indiscussa importanza in analisi numerica, cioè nella ricerca
44
approssimata di soluzioni ad equazioni complicate come ln x 3 x , che normalmente non è
possibile risolvere altrimenti.
Discontinuità
Fin’ora abbiamo parlato di continuità di una funzione in un punto del suo dominio o su tutto il suo
dominio. Chiaramente, se il dominio di una funzione non è un intervallo, ma è un unione di
intervalli, allora la funzione suddetta non può essere globalmente continua. Può esserlo, invece,
separatamente su gli intervalli separati.
Presentiamo adesso la casistica delle possibili discontinuità.
Discontinuità di 1° specie:
Questo tipo di discontinuità è noto come discontinuità di tipo salto, poiché, come suggerisce il
termine, la funzione presenta un “salto” finito.
x0
x 1
Esempio: La funzione f ( x )
per
definita in \ 0 , presenta una discontinuità di
x0
x 1
tipo salto in x0 0 . Infatti, la funzione “salta” da -1 fino a 1.
Def.: Sia f : ( a, x 0 ) ( x 0 , b) una funzione reale di variabile reale. Si dice che x0 è un
punto di discontinuità di 1° specie (o di tipo salto) se:
lim f ( x) lim f ( x)
x xo
x xo
ma sono entrambi limiti finiti.
Esempio: un altro caso di questo tipo di discontinuità è la funzione y artg
1
:
x
Nell’origine questa funzione presenta una
discontinuità di tipo salto, in quanto:
1
1
lim artg lim artg
2 x 0
x x 0
x
2
Come è facile constatare, i due limiti sono finiti e
diversi. La funzione in questione compie, in
corrispondenza del valore x 0 un salto di .
45
Discontinuità di 2° specie:
Le discontinuità di seconda specie sono quelle legate alla presenza di limiti infiniti o inesistenti in
prossimità di un dato valore di x:
Def.: Sia f : ( a, x 0 ) ( x 0 , b) una funzione reale di variabile reale. Si dice che x0 è un
punto di discontinuità di 2° specie se almeno uno dei due limiti:
lim f ( x) e lim f ( x )
x xo
x xo
è infinito o non esiste.
Portiamo due esempi:
1
:
x
essa presenta una discontinuità di seconda specie in x 0 , cioè compie un salto infinito nell’origine
e in questo caso, inoltre entrambi i limiti sono infiniti:
1
1
lim e lim .
x xo x
x xo x
il primo esempio è la – ormai oltremisura – famosa iperbole y
1
Consideriamo infine la funzione y sen il cui grafico è il seguente:
x
La funzione oscilla sempre di più tanto
più si avvicina all’origine. Pertanto non
esistono i limiti per x tendente a 0.
Quindi, y presenta una discontinuità di
seconda specie in O.
46
Discontinuità di 3° specie:
Altrimenti note come discontinuità eliminabili, perché, come ben presto ci si accorgerà, è possibile
ignorarle e rendere una funzione continua in un punto che presenta una discontinuità eliminabile.
Sia f : ( a, x 0 ) ( x 0 , b) una funzione reale di variabile reale. Si dice che x0 è un punto di
discontinuità di 3° specie (o di tipo eliminabile) se almeno uno dei due limiti:
lim f ( x) f ( x 0 ) (se è definita in x0 )
x x
0
Ma è finito.
f ( x) l finito, ma f non è definita in x0 .
Oppure xlim
x0
Esempio: La famosa funzione y
sen( x)
, presenta una discontinuità eliminabile nell’origine:
x
sen( x )
1 , ma essa non è definita in 0. Quindi, f presenta una discontinuità di
x
terza specie nell’origine:
infatti, il limite lim
x 0
In presenza di questo tipo di discontinuità, è sempre possibile eliminare la discontinuità assegnando
lim f ( x) in x0 . Questo procedimento è noto come prolungamento per
a f (x) il valore di x
x
0
continuità. Per esempio, è possibile rendere continua la funzione y
sen( x)
trasformandola nel
x
sen( x)
x0
modo seguente: y x
per
. Questa è una funzione continua, poiché il suo unico punto
x0
1
sen( x)
1 f (0) si ha la continuità di
di discontinuità, se esiste, sarebbe in x 0 , ma poiché lim
x 0
x
sen( x)
in 0.
x
47
Conclusioni
Il concetto di continuità di una funzione in x0 è un concetto puntuale. E riscrivendo la definizione
di funzione continua in un punto possiamo concepire il significato geometrico della continuità.
Scriviamo la scrittura fuori dal limite di lim f ( x) f ( x0 ) :
x x0
f ( x ) f ( x 0 ) o(1) per x x0
Questo, come abbiamo visto, significa che la funzione f può essere approssimata in x x 0 dalla
retta orizzontale y f ( x 0 ) . Ma, come possiamo notare, c’è un o(1) in questione, che è l’errore che
si ottiene approssimando f in questo modo. Come sappiamo o(1) è qualcosa che tende a 0 come 1,
cioè molto lentamente rispetto ad altri o – piccoli come o(x) .
Quindi, la continuità, approssima la funzione analizzata in un intorno di x0 attraverso la retta
orizzontale di equazione y f ( x 0 ) (cioè una funzione polinomiale di grado 0).
Ci chiediamo, allora, se è possibile approssimare una funzione in un intorno di un punto x0 del suo
dominio con errori più piccoli di o(1). La risposta è affermativa e un’approssimazione di molto
migliore rispetto alla continuità è la derivabilità, in cui gli o – piccoli in gioco sono o(x).
Come vedremo nel prossimo capitolo, la derivabilità consiste nell’approssimazione di una funzione
in un intorno di un punto del suo dominio con la retta tangente ad essa nel punto considerato (cioè
con il polinomio di grado 1 centrato nel punto studiato).
48
Capitolo 7 – Calcolo differenziale
Consideriamo ora una generica funzione f : ( a, b) . Consideriamo un punto x0 nel
dominio di questa funzione. Siamo interessati alla ricerca dell’equazione della retta tangente ad f
in ( x 0 , f ( x 0 )) . Sappiamo calcolare l’equazione del fascio proprio di rette passanti per questo punto
(cioè l’equazione generica di una retta passante per ( x 0 , f ( x 0 )) ):
y f ( x 0 ) m( x x 0 ) y f ( x 0 ) m( x x 0 )
Questa equazione dipende dal parametro reale m e rappresenta, infatti, infinite rette, tutte passanti
per il punto ( x 0 , f ( x 0 )) . Pertanto, la ricerca della retta tangente di cui parlavamo pocanzi si riduce
al calcolo del coefficiente angolare m della retta in questione: una volta noto m, basterà sostituirlo in
y f ( x0 ) m( x x0 ) per ricavare l’equazione per esteso della retta.
Rapporto incrementale
Un preludio alla definizione di derivabilità, è il concetto di rapporto incrementale.
Consideriamo ancora una generica funzione f : (a, b) e un punto x0 nel suo dominio.
Consideriamo ora un altro punto distante h da x0 , questo punto lo chiameremo banalmente e
fantasiosamente x0 h .
Definiamo la retta passante per i punti ( x 0 , f ( x 0 )) e
( x 0 h, f ( x 0 h)) con il nome di retta secante al
grafico. Il coefficiente angolare di questa retta è dato
f ( x 0 h) f ( x 0 )
dal rapporto:
(banalmente il
h
rapporto tra y e x ).
Chiamiamo questo rapporto con il nome di rapporto
incrementale della funzione f centrato in x0 :
f ( x 0 h) f ( x 0 )
R1
h
Esso esprime il coefficiente angolare della secante al variare di h, mentre x0 è fissato. Un altro
modo per scrivere il rapporto incrementale è attraverso la sostituzione x x 0 h (cioè x x 0 h ).
f ( x) f ( x0 )
Chiaramente si ha R2
.
x x0
La retta passante per ( x 0 , f ( x 0 )) e ( x 0 h, f ( x 0 h)) ha equazione:
y f ( x 0 ) R1 ( x x 0 )
Usando la seconda formulazione del rapporto incrementale abbiamo che la secante al grafico di f e
passante per ( x 0 , f ( x 0 )) e ( x, f ( x )) ha equazione:
y f ( x 0 ) R2 ( x x 0 )
Al variare di h (di x), la retta secante al grafico di f ruota intorno al punto x0 . Cosa succede per
49
h 0 (per x x0 )?
Derivabilità di una funzione in un punto x0
Quello che accade per h 0 (per x x0 ) è che la retta secante ruota attorno ad x0 fino ad
assumere una posizione limite corrispondente al coefficiente angolare della retta passante per x0 “e
x0 ”, cioè la tangente in ( x 0 , f ( x 0 )) . Definiamo allora:
Def.: Sia f : ( a, b)
e sia x0 un punto del dominio di f.
f ( x 0 h) f ( x 0 )
il rapporto incrementale di f centrato in x0 nella prima formulazione.
h
R1 allora f si dice derivabile in x0 . Analogamente: con
Se esiste finito il limite lim
h 0
Sia R1
f ( x) f ( x0 )
, il rapporto incrementale di f centrato in x0 nella seconda formulazione, se
x x0
esiste finito il limite lim R2 , f si dice derivabile in x0 .
R2
x x0
Se f è derivabile in x0 allora si indica con il simbolo f ' ( x 0 ) il valore dei suddetti limiti e f ' ( x 0 )
è detta derivata di f in x0 .
Chiaramente, se f è derivabile in x0 , allora il valore di f ' ( x 0 ) rappresenta il coefficiente angolare
della retta tangente al grafico di f in ( x 0, f ( x0 )) e l’equazione di tale tangente diventa:
y f ( x 0 ) f ' ( x0 )( x x0 )
Altri simboli con cui indicare la derivata viene indicata sono:
df
dy
Df ( x0 ) e
( x0 ) , o c’è chi preferisce
( x0 )
dx
dx
Esempio: Calcoliamo il rapporto incrementale e poi la derivata della parabola y x 2 .
Dimostreremo un risultato che dovrebbe essere già noto dagli anni precedenti, cioè arriveremo a
2
dimostrare che il coefficiente angolare della tangente in ( x 0, f ( x0 ) x0 ) di y x 2 è f ' ( x 0 ) 2 x 0 .
Consideriamo il rapporto incrementale nella sua seconda formulazione:
2
f ( x) f ( x0 ) x 2 x 0
( x x 0 )( x x 0 )
R2
x x0
x x0
x x0
x x0
Volendo, possiamo calcolare il rapporto incrementale anche usando la prima formulazione del
rapporto incrementale, così da notare le differenze:
2
f ( x 0 h) f ( x 0 ) ( x 0 h) 2 x 0
2x h h 2
R1
0
2 x0 h
h
h
h
Questo risultato era evidentemente ovvio se conoscevamo il primo, poiché vale la relazione
x x 0 h . Infatti è R1 x x0 ( x 0 h) x0 2 x 0 h R2 .
Per calcolare la derivata, allora, basta scegliere una delle due scritture e passare al limite:
lim 2 x 0 h 2 x 0 (analogamente lim x x 0 2 x 0 ), cioè il risultato atteso.
h 0
50
x x0
In generale, come studiato gli anni precedenti, vale che la tangente al grafico di una generica
parabola f ( x) ax 2 bx c in un punto di ascissa x0 è m 2ax0 b . Usando la definizione di
derivata è un attimo dimostrare che 2ax0 b f ' ( x0 ) .
Ricordo che la derivata di una funzione in un punto è il coefficiente angolare della retta tangente
alla funzione in un punto ed è quindi un valore numerico! Infatti, nella definizione di derivata, si
ricorda che il limite deve esistere FINITO.
Notiamo anche che la derivata rappresenta quindi la pendenza di una funzione in un punto e che la
derivata di una funzione polinomiale di primo grado (di una retta) è il coefficiente angolare della
retta stessa (per ogni x reale).
Derivate destre e derivate sinistre
Analogamente alla definizione di derivata, definiamo altri due concetti legati alla derivabilità in un
punto:
Def.: Sia f : ( a, b) e sia x0 un punto del dominio di f.
f ( x 0 h) f ( x 0 )
R1 allora f si dice
il rapporto incrementale. Se esiste finito il limite hlim
0
h
derivabile dalla destra di x0 (similmente per R2…) e si indica con f ' ( x 0 ) .
In modo del tutto analogo, se esiste finito il limite lim R1 allora f si dice derivabile dalla sinistra
Sia R1
h 0
di x0 (similmente per R2…) e si indica con f ' ( x 0 ) .
Il significato geometrico di questi concetti è il seguente: consideriamo la funzione y x .
Nell’origine la derivata “non è unica” nel
senso che seguendo la definizione di
derivata, si ottiene:
x 0
x
lim
lim
1 f ' (0)
x 0 x 0
x 0
x
x 0
x
lim
lim 1 f ' (0)
x 0 x 0
x 0 x
Sorge spontanea la domanda: qual è la
derivata in 0 della funzione valore
assoluto? La risposta è nessuna: diciamo
che una funzione è derivabile in un punto
x0 del suo dominio se e
solo se f ' ( x 0 ) f ' ( x0 ) f ' ( x 0 ) ( che ovviamente devono essere tutti valori finiti).
Come vedremo tra poco, se ciò non accade, si dice che x0 è un punto di non derivabilità di f.
Diciamo allora che la retta y f ( x 0 ) f ' ( x0 )( x x 0 ) è la tangente destra al grafico di f in x0 e
che y f ( x 0 ) f ' ( x0 )( x x0 ) è la tangente sinistra al grafico di f in x0 .
Abbiamo definito la derivabilità come una nozione puntuale. Estendiamo ora il concetto di
derivabilità ad un intervallo:
51
Def.: Sia f : ( a, b) . Diciamo che f è derivabile in (a, b) se è derivabile in ogni x di
(a, b) . Sia f : [a, b] . Diciamo che f è derivabile in [a, b] se è derivabile in ogni x di
(a, b) ed esistono finiti f ' (a ) e f ' (b) .
È possibile allora definire una funzione f’ che associa ad un punto del dominio della funzione f la
sua derivata. Questa è nota come funzione derivata associata ad f.
Nell’esempio precedente, f ( x) x 2 e la funzione derivata associata è f ' ( x) 2 x .
Teorema da derivabile a continua
La nozione di continuità è imparentata alla derivabilità. Infatti, sono entrambe geometricamente
rappresentabili come rette passanti per un punto di una funzione.
Ma la nozione di derivabilità è più forte rispetto alla semplice continuità, come afferma il seguente
teorema:
Teorema da derivabile a continua: Sia f : [a, b]
x0 , allora f è continua in x0 .
e sia x0 [a, b] . Se f è derivabile in
Dimostrazione:
f è derivabile in x0 per ipotesi , quindi esiste finito il limite:
f ( x) f ( x0 )
lim
f ' ( x0 )
x x0
x x0
Scriviamo la scrittura fuori dal limite:
f ( x) f ( x0 )
f ' ( x0 ) o(1) per x x0
x x0
f ( x) f ( x 0 ) f ' ( x0 )( x x 0 ) o( x x0 ) per x x0
Da cui:
Portando per f ( x0 ) dall’altra parte dell’uguaglianza:
f ( x) f ( x 0 ) f ' ( x0 )( x x 0 ) o( x x 0 ) per x x0
Passando al limite:
lim f ( x) lim f ( x0 ) f ' ( x 0 )( x x0 ) o( x x 0 ) f ( x0 ) 0 0
x x0
x x0
f ( x) f ( x0 ) , ovvero la continuità di f in x0 .
Cioè: xlim
x0
Cvd
Differenziale
Sebbene i due argomenti si confondono spesso nel campo delle funzioni ad una variabile, quando si
parla di funzioni a due variabili, l’argomento della derivabilità di una funzione in un punto e la
differenziabilità di una funzione sono due argomenti diversi.
Nella dimostrazione del teorema precedente siamo arrivati alla definizione equivalente di
derivabilità in un punto: f è derivabile in x0 se:
f ( x) f ( x 0 ) f ' ( x0 )( x x 0 ) o( x x 0 ) per x x0
Questa è nota come prima formula dell’incremento finito. Quello che esprime è
l’approssimazione della funzione f mediante la retta y f ( x 0 ) f ' ( x 0 )( x x0 ) . Infatti, la prima
formula dell’incremento finito garantisce che, in un intorno di x0 , la funzione f si confonde con la
52
retta tangente in x0 e effettuando tale approssimazione si commette un errore dell’ordine di
o( x x 0 ) (un errore molto più piccolo rispetto all’o(1) della continuità. Questo è il motivo per cui
la derivata è un’approssimazione migliore della funzione in un intorno di x0 . Vedremo che esistono
approssimazioni ancora più precise).
La quantità f ' ( x0 )( x x0 ) è nota come
differenziale di f in x0 (relativo
all'incremento h). A cosa corrisponde
graficamente? f ' ( x 0 )( x x 0 ) DF , cioè
corrisponde all’incremento di f misurato
sulla tangente. Infatti, se C è il punto
( x 0, f ( x0 )) e D è il punto ( x, f ( x)) :
DF ( x x0 )tg FCD ( x x0 ) f ' ( x0 ) .
Al tendere di x a x0 , il termine x x 0 tende
a 0, cioè, il termine x x 0 diventa
infinitesimo. Leibniz indicò questo
incremento infinitesimo dell’asse x con il
termine dx . Anche DF tende a 0 per x x0 e poiché DF è l’incremento della variabile y e al
tendere di x a 0 esso diventa infinitesimo, si dice che DF diventa un df . Otteniamo allora:
df ( x 0)= f ' ( x 0)( x− x 0) , da cui l’uso del simbolo
f ' ( x 0)=
df
(x )
dx 0
Punti di non derivabilità
Come abbiamo anticipato, una funzione derivabile in un punto x0 del suo dominio è ivi continua.
Non vale il viceversa. Abbiamo già dato un controesempio: la funzione f ( x ) x è continua su
tutto l’asse reale, ma non è derivabile nell’origine. Basti considerare il fatto che f ' ( x)
x
e il
x
dominio della derivata è D': \ 0 . Questo indica che in un intorno di x 0 f è definita ed è
quindi continua in un intorno di 0, mentre la derivata ammette una discontinuità di terza specie,
sempre in x 0 . La derivata non esiste, quindi, in x 0 (infatti come avevamo già notato
f ' (0) f ' (0) …).
Punti angolosi:
Definiamo allora cos’è un punto angoloso:
Def.: Sia f : ( a, b) e sia x0 (a, b) . Si dice che x0 è per f un punto angoloso se si
verifica uno dei seguenti casi:
Esistono, le derivate destra e sinistra in x0 , ma f ' ( x 0 ) f ' ( x0 ) ;
f è continua in x0 , esiste f ' ( x 0 ) (risp. f ' ( x 0 ) ) e il rapporto incrementale sinistro (risp.
destro) tende all’infinito.
53
1
x0
x artg
x per
Esempio: La funzione f ( x )
è continua in 0, ma non è ivi derivabile. Infatti:
x0
0
calcoliamo il limite del rapporto incrementale destro e sinistro:
1
x artg 0
x
lim
f ' (0)
x 0
x0
2
1
x artg 0
x
lim
f ' (0)
x 0
x0
2
I limiti sono differenti quindi non esiste la derivata in 0 e poiché entrambe le derivate sono finite,
allora siamo in presenza di un punto angoloso.
Punti a tangente verticale:
I punti a tangente verticale sono punti in cui la funzione è definita, ma la derivata è infinita:
Def.: Sia f : ( a, b) e sia f continua in x0 (a, b) . Si dice che x0 è per f un punto a
tangente verticale se accade uno dei seguenti casi:
f ( x) f ( x0 )
xlim
x0
x x0
f ( x) f ( x 0 )
xlim
x0
x x0
Cioè le derivate destra e sinistre tendono entrambe allo stesso infinito per x x0 .
Esempio: Una funzione che presenta una tangente verticale è la funzione f ( x) 3 x . Calcoliamo il
limite del rapporto incrementale per x 0 :
x 0
1
lim
3
x
0
x0
x2
Quindi f ha in 0 un punto a tangente verticale:
3
lim
x 0
La retta x = 0 è la tangente al grafico di f in x = 0.
In generale, la retta x x 0 , se x0 è punto a tangente verticale, è la tangente al grafico di f in
54
x x0 .
Punti di cuspide:
L’ultimo tipo di punti di non derivabilità sono i punti di cuspide:
Def.: Sia f : ( a, b) e sia x0 (a, b) . Si dice che x0 è per f un punto di cuspide verticale
se accade uno dei seguenti casi:
f ( x) f ( x 0 )
f ( x) f ( x 0 )
e lim
xlim
x0
x x0
x x0
x x0
f ( x) f ( x 0 )
f ( x) f ( x0 )
e lim
xlim
x0
x x0
x x0
x x0
Cioè le derivate destra e sinistre tendono a due infiniti diversi per x x0 .
Graficamente questa è la situazione che si presenta quando si ha a che fare con una cuspide.
Questo significa che le funzioni che presentano una cuspide in un loro punto x0 hanno derivata
destra e sinistra in x0 infinite, ma con infiniti diversi.
Esempio: La funzione f ( x )
x ha in x0 0 un punto di cuspide. Calcoliamo la derivata di f
in 0:
x
xlim
0 x
lim
x 0 x
lim x
x0 x
x
Cioè, f ha una cuspide in 0.
Regole di derivazione
Cominciamo a studiare alcune regole di derivazione legate alla combinazione lineare, al prodotto e
al quoziente di funzioni:
Teorema di derivazione della combinazione lineare tra funzioni:
Siano f , g : [a, b] e derivabili in x0 [a, b] e sia c . Sono derivabili in x0 anche le
seguenti funzioni: c f e f g . E valgono:
(c f )' ( x0 ) c f ' ( x 0 )
( f g )' ( x0 ) f ' ( x 0 ) g ' ( x 0 )
Lo stesso teorema si può formula ricorrendo alla combinazione lineare: siano c1 , c 2 , vale:
(c1 f c 2 g )' ( x 0 ) c1 f ' ( x 0 ) c 2 g ' ( x0 )
55
Esempio: Calcoliamo il limite del rapporto incrementale della funzione f ( x) x 2 7 x :
lim
x x0
2
x 2 7 x x0 7 x 0
x x0
lim x x 0 7 lim
x x0
x x0
lim x
2
2
x x0
x x0
x x0
x x0
x 0 7 x 7 x0
x x0
x
lim
x x0
2 x0 7 lim
x x0
1
x x0
x0
x x0
2
2
7
2 x0 7
x x0
x x0
1
2 x0
Chiaramente il teorema è vero, infatti, basti guardare l’esempio per capire che la linearità della
derivata è dovuta alla linearità del limite.
Ci chiediamo allora come calcolare la derivata di un prodotto di funzioni. Vale il seguente risultato:
Teorema di derivazione del prodotto di funzioni:
Siano f , g : [a, b] e derivabili in x0 [a, b] . Allora è derivabile in x0 anche la funzione
f g e, più precisamente:
( f g )' ( x 0 ) f ' ( x0 ) g ( x0 ) f ( x 0 ) g ' ( x 0 )
Dimostrazione:
Calcoliamo il limite del rapporto incrementale del prodotto:
f ( x ) g ( x ) f ( x0 ) g ( x 0 )
( f g )' ( x 0 ) lim
x x0
x x0
Aggiungiamo e sottraiamo f ( x 0 ) g ( x) al numeratore:
f ( x) g ( x ) f ( x 0 ) g ( x0 )
f ( x) g ( x ) f ( x0 ) g ( x0 ) f ( x 0 ) g ( x ) f ( x0 ) g ( x)
lim
lim
x x0
x x0
x x0
x x0
Operiamo un raccoglimento:
f ( x) g ( x) f ( x 0 ) g ( x) f ( x 0 ) g ( x) f ( x0 ) g ( x 0 )
lim
x x0
x x0
lim
f ( x) g ( x) f ( x 0 ) g ( x)
f ( x 0 ) g ( x) f ( x0 ) g ( x0 )
lim
x x0
x x0
x x0
lim
f ( x) f ( x 0 )
g ( x) g ( x0 )
g ( x) lim
f ( x0 )
x x0
x x0
x x0
x x0
x x0
Esplicitiamo quello che abbiamo ottenuto come:
f ' ( x0 ) lim g ( x) g ' ( x 0 ) lim f ( x 0 ) f ' ( x 0 ) g ( x0 ) g ' ( x0 ) f ( x0 )
x x0
x x0
Cvd
Con questa stessa regola possiamo dimostrare il seguente corollario:
56
Teorema di derivazione del rapporto di funzioni:
Siano f , g : [a, b] e derivabili in x0 [a, b] . Allora è derivabile in x0 anche la funzione
f
e, più precisamente:
g
'
f ' ( x0 ) g ( x 0 ) f ( x0 ) g ' ( x 0 )
f
( x 0 )
g 2 ( x0 )
g
Dimostrazione: Conseguenza del teorema precedente, ponendo
f
1
f .
g
g
Cvd
Ma le operazioni elementari non sono le uniche operazioni tra funzioni di cui è possibile calcolare
la derivata mediante semplici formule. Mostriamo ora le formule di derivazione della funzione
inversa e della funzione composta:
Teorema di derivazione della funzione inversa:
Sia f : I J , I e J intervalli reali, derivabile in x0 I . Sia f continua in I e ivi
biunivoca. Sia y 0 f ( x0 ) . Se f ' ( x 0 ) 0 , la funzione inversa f 1 è derivabile in y 0 e vale:
1
( f 1 ) ' ( y 0 )
f ' ( x0 )
Dimostrazione: Per ogni y J , con y y 0 esiste una x I tale che f ( x) y .
Calcoliamo allora il rapporto incrementale della funzione inversa:
f 1 ( y ) f 1 ( y 0 )
y y0
1
Ma per ipotesi y 0 f ( x0 ) e quindi x0 f ( y 0 ) .
Inoltre, f ( x) y e quindi f 1 ( y ) x .
Mettendo insieme le condizioni ricaviamo:
f 1 ( y ) f 1 ( y 0 )
x x0
y y0
f ( x) f ( x 0 )
Chiaramente, il membro a destra è il reciproco del rapporto incrementale della funzione f . Con un
passaggio al limite, ricaviamo:
f 1 ( y ) f 1 ( y 0 )
x x0
lim
lim
y y0
x x0 f ( x ) f ( x )
y y0
0
1
1
Infatti, se y y 0 abbiamo che f ( x) f ( x 0 ) cioè x x0 .
Proseguiamo:
x x0
1
1
lim
lim
x x0 f ( x ) f ( x )
x x0 f ( x ) f ( x )
f ( x) f ( x0 )
0
0
lim
x x0
x x0
x x0
E poiché, per ipotesi, f è derivabile in x0 :
57
f 1 ( y 0 )
1
1
f ( x) f ( x0 )
f ' ( x0 )
lim
x x0
x x0
Cvd
Esempio: Consideriamo la funzione y f ( x) x 3 nel punto P (2,8) . Calcoliamo la derivata in 2
come limite del rapporto incrementale:
x3 8
( x 2)( x 2 2 x 4)
lim
lim
lim x 2 2 x 4 12
x2 x 2
x2
x2
x2
f, definita su tutto l’asse reale è invertibile e la sua inversa è y 1 f 1 ( x) 3 x .
La funzione inversa ha derivata in 8 (cioè in f (2) ) pari a:
1
1
( f 1 )' (8)
f ' (2) 12
Se volessimo calcolare la derivata normalmente:
3
3
x 2
x 2 3 x 2 23 x 4
x 8
1
1
1
lim
lim
lim
lim
2
2
2
3
x 8 x 8
x 8 x 8
x 8 x 8 3
x 8 3
3
3
3
x 2 x 4
x 2 x 4
x 2 x 4 12
Dimostriamo ora l’ultimo teorema per il calcolo delle derivate di funzioni ottenute a partire da altre
funzioni, indagando sulla derivata della funzione composta:
Teorema di derivazione della funzione composta:
Siano I e J intervalli reali, sia f : I J , derivabile in x0 I . Sia g : J
y 0 f ( x0 ) . Allora si ha che g ° f è derivabile in x0 ed è:
( g ° f )' ( x 0 ) g ' ( f ( x0 )) f ' ( x 0 )
derivabile in
Omettiamo la dimostrazione che è semplice in sé. Basti scrivere la derivata g ' ( y 0 ) , ove y 0 f ( x0 )
, come limite del rapporto incrementale, con la scrittura fuori dal limite. Poi, si divide tutto per
x x 0 . La tesi segue dopo poche considerazioni sulla tendenza dei limiti.
Esempio: Calcoliamo la derivata della funzione y f ( x) e x in x0 4 .
Grazie a questo teorema sappiamo che per calcolare questa derivata occorre derivare “a modi
scatola”, cioè derivando prima –x e moltiplicando questa derivata per la derivata della funzione
esponenziale come se all’esponente avesse x (la derivata dell’esponenziale è identica a sé stessa):
(e x )' (4) ( x)' (4) (e x )(4) 4e 4
Esempio: Questo teorema ci garantisce che se f è una funzione pari, allora la funzione derivata ad
essa associata è dispari, e viceversa.
Corollario: Sia f una funzione pari definita su un suo dominio a valori reali. Se essa è una
funzione pari, allora la funzione derivata f’ è una funzione dispari, e viceversa.
Dimostrazione:
Se f è pari significa che x D , con D dominio di f , è f ( x ) f ( x) (per esempio la funzione
coseno…).
58
Questo significa che f ' ( x) Df ( x) f ' ( x) . Pertanto, f ' ( x) f ' ( x) , cioè la derivata è
dispari.
Un’analoga dimostrazione vale per le funzioni dispari.
Cvd
Calcolo delle derivate di funzioni elementari
Ci proponiamo ora di calcolare le funzioni derivate delle funzioni elementari.
Derivata di una costante:
Le funzioni costanti sono molto semplici da derivare, questo perché il rapporto incrementale è
nullo, essendo f ( x1 ) f ( x 2 ) C per ogni x1 , x 2 D .
Pertanto se f ( x) C , con C costante, su tutto il suo dominio vale: f ' ( x) 0 .
In effetti è quello che ci si aspetta, in quanto le funzioni costanti sono rette orizzontali e la derivata
di una retta (in questo caso orizzontale) è la sua pendenza (in questo caso 0).
Derivata di una potenza:
Le funzioni potenza sono tra le più facili da derivare: applicando la definizione di derivata
attraverso la prima formula del rapporto incrementale si arriva a scrivere (sia f ( x) x una
funzione potenza con reale e x 0 ):
h
h
1 1
1
x 1 x x
( x h) x
x
1
lim
lim
lim x
lim x
h 0
h 0
h 0
h 0
h
h
h
x
h
1
x
h
x
h
1 1
x
1
lim x
x 1
h 0
h
x
Questa regola vale per ogni reale.
Derivata di un’esponenziale:
Consideriamo la funzione f ( x ) a x con a 0 e a 1 .
Allora vale che
f ' ( x) a x ln a
In particolare, per f ( x) e x , come avevamo anticipato, f ' ( x) e x .
Derivata di una funzione logaritmica
Consideriamo ora la funzione f ( x ) log a x . Ci proponiamo di calcolare la derivata di questa
funzione. Possiamo usare la regola della derivata della funzione inversa. Per ora, non considereremo
il dominio delle funzioni quando calcoleremo l’inversa, ma sarebbe opportuno farlo.
Se f ( x) y log a x allora l’inversa è x a y . E sappiamo che, per il teorema di derivabilità di
59
un’inversa:
f ' ( x) D log a x
1
1
1
1
y
y log a e log a e
x
( f )' ( y ) a ln a a
1
Derivata di una funzione circolare:
Calcoliamo la derivata della funzione f ( x) sen( x) :
sen( x h) sen( x)
sen( x) cos(h) sen(h) cos( x) sen( x)
f ' ( x) lim
lim
h 0
h 0
h
h
sen( x)cos(h) 1 sen(h) cos( x)
sen( x )cos(h) 1 sen(h) cos( x)
lim
lim
h 0
h 0
h
h
h
sen( x)cos(h) 1 sen(h) cos( x)
sen( x )1 cos(h) sen(h) cos( x)
lim
lim
h 0
h
0
h
h
h
h
0 cos( x )
Ecco quindi dimostrato che per f ( x) sen( x) la funzione derivata è f ' ( x) cos( x ) .
Analogamente si dimostra che per f ( x) cos( x) è f ' ( x) sen( x ) .
Cerchiamo invece di calcolare la derivata della funzione tangente (come derivata di un rapporto):
sen( x )
Dalla relazione f ( x ) tg ( x )
deriviamo e otteniamo:
cos( x )
sen( x) ( Dsenx) cos x D(cos x) senx cos 2 x sen 2 x
1
D
2
2
cos( x)
cos x
cos x
cos 2 x
1
1 tg 2 x .
Quindi: D(tgx)
2
cos x
Analogamente si dimostra che D(cot gx)
1
1 . cot g 2 x .
2
sen x
Derivata delle funzioni circolari inverse:
Calcoliamo ora la derivata della funzione f ( x) arsen( x) usando il teorema per la derivata della
funzione inversa:
Se y arsen(x) allora la sua inversa è x sen( y ) .
1
1
1
Allora vale Darsen( x)
. Cerchiamo quindi il coseno dell’angolo
Dsen( y ) cos y cos(arsen( x ))
il cui seno è x. Se il seno è x, poiché vale la relazione fondamentale della goniometria, è
sen 2 x cos 2 x 1 e quindi: x 2 cos 2 x 1 cos x 1 x 2 .
1
Quindi: Darsen( x)
. Ma il seno è invertibile solo per angoli il cui coseno è positivo.
1 x2
1
Quindi l’unica soluzione accettabile è Darsen( x)
.
1 x2
60
Analogamente si dimostra che Dar cos( x)
1
1 x2
(dimostrare per esercizio).
E analogamente, ancora, si può dimostrare che Dartg ( x)
1
(dimostrare per esercizio).
1 x2
Derivata del valore assoluto:
Calcoliamo ora la derivata di f ( x ) x semplicemente ragionando in questo modo:
x0
x0
x
1
f ( x) x
per
. Quindi la derivata è: f ' ( x) per
(ricordiamo che il valore
x0
x0
x
1
assoluto non è derivabile in 0).
x
Possiamo mettere insieme le due scritture della derivata e otteniamo la funzione f ' ( x)
(che è
x
esattamente quella scritta sopra).
Derivata per il caso in cui ci sia una funzione elevata ad una funzione:
Siano f e g due funzioni e sia f g la funzione ottenuta elevando f all’esponente g .
Possiamo calcolarne la derivata ricorrendo a questo trucco:
g ( x)
Df ( x) g ( x ) De g ( x ) ln f ( x ) f ( x ) g ( x ) g ' ( x) ln f ( x)
f ( x)
Difatti si pone la funzione come argomento del logaritmo e poi si pone il tutto come esponente di e.
Quindi, si applicano le proprietà dei logaritmi e si porta g(x) davanti al logaritmo e si deriva con la
regola della derivata di una funzione composta.
Teorema di Fermat per le derivate
Fermat fu un matematico eccezionale, uno dei più grandi mai esistiti, e, come tale, non poteva non
aver messo il naso anche nell’ambito dell’analisi matematica, ove troviamo un importante teorema
che porta il suo nome, fondamentale per lo studio di funzioni (ultimo argomento di cui tratteremo).
Teorema di Fermat: Sia f : ( a, b) , sia x0 ( a, b) . Se x0 è un estremante relativo
all’intervallo (a, b) e se f è ivi derivabile, allora è f ' ( x 0 ) 0 .
Dimostrazione:
Sia x0 (a, b) , per esempio, punto di minimo relativo in (a, b) . Allora, per ogni altra x di (a, b) è
f ( x) f ( x 0 ) . Calcoliamo il rapporto incrementale destro e sinistro in x0 :
f ( x) f ( x0 )
lim
è una quantità positiva, poiché è il rapporto tra un numeratore positivo (infatti
x x0
x x0
f ( x) f ( x 0 ) e poiché ci troviamo in un intorno destro di x0 , anche il denominatore è positivo).
Quindi
61
f ' ( x 0 ) lim
f ( x) f ( x 0 )
0
x x0
f ' ( x 0 ) lim
f ( x) f ( x0 )
0
x x0
x x0
Analogamente:
x x0
Poiché ci troviamo in un intorno sinistro di x0 .
Ma f è derivabile in x0 per ipotesi. Quindi f ' ( x 0 ) f ' ( x0 ) f ' ( x 0 ) . Quindi l’unica possibilità
è che la derivata sia nulla.
Cvd
Esempio: La parabola f ( x) 3 x 2 x 1 è rivolta verso l’alto. Il vertice di questa parabola è
banalmente il punto di minimo assoluto della funzione f . Determiniamo l’ascissa del vertice
usando la ben nota formula:
b
1
xV
. Dimostriamo che anche derivando si arriva allo stesso risultato:
2a
6
f ' ( x) 6 x 1 .
Se f ammette un punto di minimo o di massimo, in quel punto la derivata è nulla. Poniamo allora
1
f ' ( x) 6 x 1 0 x . In questo caso è vero che questo è il punto di minimo della funzione
6
f , ma non sempre vale il viceversa.
Infatti, esistono funzioni che presentano punti in cui la derivata è nulla, ma che non sono né
massimi né minimi.
Banalmente, la funzione cubica f ( x) x 3 , definita su tutto l’asse reale, passa per l’origine O(0,0),
ha derivata nulla nell’origine, ma non x = 0 non è estremante:
f ' ( x) 3 x 2 0 x 0
Dimostriamo che (0,0) non è un estremante.
Basti considerare i punti x 1 :
f (1) 1 0 f (0) . Quindi 0 non può essere un massimo (esiste, infatti, un valore di x in cui la
funzione è più grande di 0).
f ( 1) 1 0 f (0) . Quindi 0 non può essere nemmeno un minimo (esiste, difatti, un valore di x
per cui la funzione è più piccola di 0).
Questo significa che l’origine non è un estremante relativo a tutto il dominio della cubica (lo è se
restringiamo la cubica ad un intorno destro o sinistro di 0…).
Teorema di Rolle
Al buon vecchio Michel Rolle dobbiamo un altro teorema fondamentale per il calcolo infinitesimale
e per lo studio di funzioni. Grazie a questo teorema, che è un’immediata conseguenza del teorema
di Weierstrass e del teorema di Fermat, potremo dimostrare altri risultati ancora più generali e
ancora più importanti che ci permetteranno uno studio di funzioni e un ampliamento della teoria
degli argomenti successivi.
62
Teorema di Rolle: Sia f : [a, b] , se f soddisfa le seguenti ipotesi:
f continua su [a, b] ;
f derivabile su (a, b) ;
f (a) f (b)
Allora esiste almeno un punto x0 (a, b) tale che f ' ( x 0 ) 0 .
Dimostrazione:
Se f è costante su [a, b] , allora il teorema è banalmente vero per ogni x si tale intervallo grazie alla
terza ipotesi (la derivata di una costante è nulla).
Se f non è costante, però è continua su [a, b] e f ( a) f (b) . E allora, per il teorema di
Weierstrass, esistono un punto di massimo e/o uno di minimo assoluti in (a, b) . Sia, per esempio,
esso il punto x0 (a, b) , per il teorema di Fermat vale che f ' ( x 0 ) 0 .
Cvd
Se cade la terza ipotesi, il teorema perde di validità. Infatti, la funzione f : [3,4] , definita da
f ( x) x 2 soddisfa le prime due ipotesi, ma non la terza (infatti f (3) 9 16 f (4) ) e infatti la
derivata non si annulla mai in quell’intervallo. Anche se le altre due ipotesi cadono, il teorema perde
validità. A voi il compito di trovare dei controesempi al teorema relativi alla perdita di validità nel
caso manchi una delle prime due ipotesi.
Si noti che non è richiesto che il punto x0 nella tesi del teorema sia un estremante. Può non esserlo.
Basta che sia un punto stazionario (o critico), cioè un punto con derivata nulla.
Teorema di Cauchy:
In realtà questo teorema è poco usato dal punto di vista dell’analisi. Viene usato solo per dimostrare
altri teoremi, ma non ha un’applicazione pratica davvero evidente. Per esempio, lo useremo per
dimostrare il teorema di de l’Hopital e il teorema di Lagrange. La dimostrazione di quest’ultimo,
sebbene si possa fare anche senza ricorrere al teorema di Cauchy, è identica a quella di questo
teorema, quindi, per non ripeterla, la facciamo una volta sola, qui:
Teorema di Cauchy: Siano F , G : [a, b] , tali che:
F e G sono continue su [a, b] ;
F e G sono derivabili su (a, b) ;
Allora esiste almeno un punto x0 (a, b) tale che:
F (b) F (a)G' ( x0 ) G (b) G (a)F ' ( x0 )
Dimostrazione:
Consideriamo la funzione ausiliaria ottenuta nel modo seguente:
H ( x) F (b) F (a )G ( x) G (b) G (a)F ( x)
Poiché valgono le due ipotesi sulla continuità e sulla derivabilità di F e G in [a, b] e (a, b) , allora a
maggior ragione H è ivi continua e derivabile. Inoltre:
H (a ) F (b) F (a )G (a ) G (b) G (a )F (a ) F (b)G (a ) F (a )G (a ) F (a)G (b) G (a ) F (a )
F (b)G (a ) F (a )G (b)
H (b) F (b) F ( a)G (b) G (b) G (a )F (b) F (b)G (b) F (a )G (b) F (b)G (b) G (a) F (b)
F (b)G (a ) F (a )G (b)
63
Quindi, per H vale H (a ) H (b) .
Sono quindi soddisfatte le tre ipotesi del teorema di Rolle e lo posso applicare alla funzione H:
Per il teorema di Rolle esiste quindi un punto x0 (a, b) tale che H ' ( x0 ) 0 .
H ' ( x) F (b) F (a )G ' ( x) G (b) G (a)F ' ( x)
E quindi in x0 vale:
H ' ( x0 ) 0 F (b) F (a )G ' ( x0 ) G (b) G (a )F ' ( x 0 )
Da cui:
F (b) F (a)G' ( x0 ) G (b) G (a)F ' ( x0 ) 0 F (b) F (a)G ' ( x0 ) G (b) G (a)F ' ( x0 )
Cvd
Alcune volte, la tesi di questa teorema è comodo scriverla come: “Allora esiste almeno un punto
x0 ( a, b) tale che:
F (b) F (a ) F ' ( x 0 )
.
G (b) G (a ) G ' ( x 0 )
Teorema di Lagrange
Questo teorema generalizza il teorema di Rolle per funzioni definite su un intervallo in cui cade la
terza ipotesi, quindi in cui f ( a) f (b) , ma vedremo che il teorema di Rolle rappresenta comunque
un caso speciale del teorema di Lagrange.
Teorema di Lagrange: Sia f : [a, b]
f continua su [a, b] ;
f derivabile su (a, b) ;
, se f soddisfa le seguenti ipotesi:
Allora esiste almeno un punto x0 (a, b) tale che f ' ( x 0 )
f (b) f (a ) f (a) f (b)
.
ba
ab
Dimostrazione: Questo teorema può essere visto come un corollario del teorema di Cauchy, in cui
f (b) f (a)
x (che in pratica
G(x) = x, oppure si consideri la funzione ausiliaria H ( x) f ( x)
ba
ruota f finché le ordinate in a e in b non diventano uguali), basterà allora notare che H è continua e
derivabile rispettivamente su [a, b] e su (a, b) e infine che H(a) = H(b). La tesi seguirà
immediatamente dal teorema di Rolle.
Cvd
Questo teorema generalizza il teorema di Rolle. Infatti, se f ( a) f (b) allora dovrà esistere un
f (b) f (a )
0
0.
punto x0 (a, b) tale che f ' ( x 0 )
ba
ba
Sostanzialmente, queste due figure dovrebbero facilitare la comprensione del senso di questi due
teoremi:
64
La funzione f : 0,3 in figura è la parabola
f ( x) x 2 3 x 1 e soddisfa le ipotesi del
teorema di Rolle, infatti è continua e derivabile
negli intervalli 0,3 e (0,3) e
f (0) 1 f (3) . Pertanto, esiste un punto di
(0,3) in cui la derivata si annulla: questo punto è
3
x0 .
2
Per questa seconda funzione il teorema di Rolle non è valido, ma vale quello di Lagrange, come
mostra la figura, esiste un punto all’interno dell’intervallo (1,4) in cui la tangente ha la stessa
pendenza della secante passante i punti relativi alle ascisse 1 e 4.
Il teorema di Lagrange assume anche il nome di Teorema del Valor Medio e ha due importanti
conseguenze. La prima conseguenza è questa. Consideriamo il rapporto incrementale centrato in un
punto x0 di una funzione che soddisfa le ipotesi del teorema di Lagrange: sia f questa funzione.
f ( x) f ( x0 )
x x0
Per il teorema di Lagrange esiste un altro punto x1 ( x 0 , x) (supponendo x x 0 ) tale che
f ( x) f ( x 0 )
f ' ( x1 )
x x0
Otteniamo: f ' ( x1 )( x x0 ) f ( x) f ( x 0 ) f ( x) f ( x0 ) f ' ( x1 )( x x0 )
Poiché x1 ( x 0 , x) , possiamo scriverlo in questo modo: x1 x0 ( x x 0 ) , cioè una scrittura che
esprima x1 al variare di un parametro (0,1) . Allora otteniamo la seconda formula
dell’incremento finito:
f ( x ) f ( x 0 ) f ' ( x0 ( x x 0 ))( x x0 )
Rispetto alla prima formula, questa è più precisa (notare l’assenza dell’errore rappresentato dall’o –
piccolo), ma ha lo svantaggio di contenere al suo interno la derivata di un punto non ben definito
(nel senso che il punto x1 non lo conosciamo a priori).
65
Andamento di una funzione
Come anticipato, grazie alle derivate è possibile studiare l’andamento di una funzione derivabile su
un certo intervallo. Possiamo, cioè, calcolare la pendenza della funzione in ogni punto in cui essa
risulta derivabile. Infatti, vale il seguente teorema, di cui non forniremo una dimostrazione:
Teorema: Sia f : I , con I un qualunque intervallo. Sia f ivi derivabile. Allora:
Condizione necessaria e sufficiente affinché f sia monotona non decrescente su I è che
f ' ( x) 0 x I ;
Condizione necessaria e sufficiente affinché f sia monotona non crescente su I è che
f ' ( x) 0 x I
Questo teorema è la seconda conseguenza del teorema di Lagrange e fornisce un utilissimo
strumento per studiare i grafici delle funzioni a partire dal loro andamento.
Invece, il seguente teorema, anch’esso di importanza notevole, fornisce una caratterizzazione delle
funzioni costanti con una ricorsione alle derivate e deriva dal teorema precedente:
Teorema di Caratterizzazione delle funzioni costanti: Sia f : I
intervallo. Sia f ivi derivabile. Allora:
f è costante su I f ' ( x) 0 x I .
, con I un qualunque
Dimostrazione:
La prima implicazione è ovvia. Infatti, se f è costante su I f ' ( x) 0 x I (si calcoli il
rapporto incrementale…). Dimostriamo la seconda implicazione.
Sia f ' ( x) 0 x I , allora allo stesso tempo f è monotona non decrescente e monotona non
crescente. Quindi è costante.
Cvd
Per questo teorema è fondamentale l’ipotesi della derivabilità (quindi la continuità) di f su UN solo
x
intervallo I. Infatti, la funzione f ( x )
ha derivata nulla in ogni suo punto, ma non è costante.
x
Questo perché questa funzione non è continua in un intorno di 0 (e quindi in tutto il suo dominio). Il
teorema resta vero se consideriamo f su un intervallo destro e uno sinistro di O.
Derivate di ordine superiore
Abbiamo definito la derivata come limite del rapporto incrementale e abbiamo studiato i casi in cui
la funzione non è derivabile in un punto. Ci chiediamo ora cosa succede se deriviamo la derivata
ulteriormente.
Si inizia allora a parlare di derivate successive e, attraverso il Teorema di Taylor, che accenneremo,
vedremo come ricorrendo ad esse sarà possibile studiare le funzioni molto più semplicemente.
Def.: Sia f : I , con I un qualunque intervallo. Sia f derivabile una volta in un intorno di
un punto x0 I e f’ derivabile in x0 , allora definiamo la derivata seconda di f in x0 e la
indichiamo con uno dei seguenti simboli:
d2 f
2
f ' ' ( x0 ) ,
( x0 ) , D f ( x 0 )
2
dx
x
La derivata della derivata prima in 0 .
66
Analogamente possiamo definire induttivamente la derivata terza, la derivata quarta e così via.
Definiamo allora:
Def.: Sia f : I , con I un qualunque intervallo. Sia f derivabile n – 1 volte in un intorno
di un punto x0 I e f(n-1) derivabile in x0 , allora definiamo la derivata n – esima di f in x0 e la
indichiamo con uno dei seguenti simboli:
dn f
n
f ( n ) ( x0 ) ,
( x0 ) , D f ( x 0 )
n
dx
x
La derivata della derivata n – 1 – esima in 0 .
Spontaneamente nasce la definizione di funzione derivata n – esima , che associa ad ogni funzione
la sua derivata n – esima.
Esempio: La funzione seno è derivabile infinite volte in ogni intorno di ogni suo punto e vale:
Dsen( x) cos( x )
D 2 sen( x) D cos( x) sen( x)
D 3 senx( x) D 2 cos( x) D( sen( x)) cos( x)
D 4 sen( x) D 3 cos( x) D 2 ( sen( x)) D( cos( x)) sen( x)
...
Dopo la derivata quarta, tutte le derivate della funzione seno cominciano a ripetersi (si dice che le
derivate del seno sono congrue modulo 4).
Anche la funzione e x è derivabile infinite volte nel suo dominio e le derivate sono tutte uguali a e x
.
La funzione y x 3 è derivabile infinite volte su tutto l’asse reale e vale:
Dx 3 3 x 2
D 2 x 3 D3 x 2 6 x
D 3 x 3 D 2 3x 2 D6 x 6
D 4 x 3 D 3 3x 2 D 2 6 x D6 0
D 5 x 3 D 4 3x 2 D 3 6 x D 2 6 D0 0
....
Cioè tutte le derivate sono nulle a partire dalla quarta in poi. Ma sottolineiamo il fatto che se da un
certo punto in poi tutte le derivate di una funzione sono nulle non significa che essa non sia
derivabile infinite volte, ma semplicemente che le due derivate sono definitivamente funzioni
nulle.
Teorema di de l’Hopital
0
o .
0
L’uso di questo teorema, tuttavia, è altamente scoraggiato dai docenti universitari di analisi
(secondo me perché vogliono che gli studenti fatichino e non vogliono che arrivino alla soluzione
facilmente…) perché ritengono che non sempre sia possibile arrivare ad una soluzione apprezzabile
con questo teorema (vedremo un esempio).
Enunciamo ora un teorema che facilita il calcolo dei limiti nella forma di indecisione
67
Teorema di de l’Hopital: Siano f , g : (a, b) , due funzioni derivabili in (a, b) ove
a b . Siano g ( x) 0 e g ' ( x) 0 in (a, b) . Siano verificate entrambe le ipotesi:
f ( x)
0
Il rapporto
presenta il caso di indecisione
o
per x a o per x b ;
g ( x)
0
f ' ( x)
Esista il limite per x a o per x b del rapporto
;
g ' ( x)
Allora vale:
f ( x)
f ' ( x)
f ( x)
f ' ( x)
lim
lim
lim
oppure xlim
x a g ( x)
xa g ' ( x)
b g ( x )
x b g ' ( x )
La dimostrazione di questo teorema è noiosa e ricorre al teorema di Cauchy (almeno per il caso di
0
indecisione ). Noi ci limiteremo a studiare le conseguenze di questo teorema.
0
Ora possiamo dimostrare gli ordini tra infiniti ricorrendo a questo teorema: ricordiamo che
log x x e x x! x x
Quindi:
log x
lim
. Per il teorema di de l’Hopital possiamo derivare il numeratore e il denominatore e
x
x
il risultato del limite non cambia (ATTENZIONE: derivare numeratore e denominatore
separatamente, non come derivata di un rapporto!): consideriamo il caso
1
log 1 x
1
log x
x lim log x
lim
lim
x
x
x
x
x 1
x
Possiamo ancora applicare de l’Hopital. Vi accorgerete che applicando nuovamente il teorema
arriveremo ancora ad una forma di indecisione, che però preserva il grado del denominatore, mentre
abbassa quello del denominatore ogni volta. Quindi, derivando volte arriveremo a scrivere:
!
lim 0
x x
Quindi il logaritmo è sempre un infinito di ordine inferiore rispetto alla potenza. Se non
cambia un gran ché…
x
0 cioè che l’esponenziale è un infinito di ordine superiore rispetto
x e x
Ora dimostriamo che lim
alla potenza:
x
applichiamo allora de l’Hopital:
lim x
x e
x
x 1
lim x lim
x e
x e x
Ma riapplicando ancora de l’Hopital
volte arriviamo a scrivere:
x
!
lim x lim x 0
x e
x e
La derivata di x! non è esprimibile in termini di fattori finiti. Per dimostrare gli altri due infiniti
68
occorre ricorrere ad altri metodi.
Il teorema di de l’Hopital non dà sempre esito positivo. Per esempio, se viene a mancare la seconda
ipotesi, il teorema perde di validità. Consideriamo il limite:
1
x 2 sen
x 0 poiché le funzioni sono derivabili, la prima ipotesi del teorema di de l’Hopital è
lim
x
x 0
0
e 1
soddisfatta. Deriviamo allora:
1
1
1
x 2 sen
2 xsen cos
x lim
x
x ?
lim
x
x
x 0
x
0
e 1
e
La funzione al numeratore non ammette limite per x 0 , ma il limite esiste. Infatti, ricorrendo ai
limiti notevoli (portiamo una x del numeratore al denominatore e abbiamo al denominatore un
limite notevole che tende a 1, mentre il numeratore tende a 0):
1
xsen
x
1
x 2 sen
x
x
e −1
0
lim
=lim
= =0
x
x
1
x →0
x →0
e −1
In questo caso è saltata la seconda ipotesi del teorema (infatti, il rapporto delle derivate deve
esistere, mentre in questo caso non esiste).
()
()
Il teorema di Taylor con resto di Peano
Fino ad ora abbiamo usato le nozioni di matematica e di analisi apprese per approssimare le
funzioni in un intorno di un loro punto mediante polinomi, prima di grado 0 (continuità), poi di
grado 1 (derivabilità), riducendo di volta in volta l’errore (espresso mediante o – piccoli).
Per esempio, una generica funzione y f (x) , in un intorno di x x 0 Dominio, può essere scritta
come:
Continuità y f ( x 0 ) o(1) per x x0
Derivabilità y f ( x 0 ) f ' ( x 0 )( x x0 ) o( x x 0 ) per x x0 .
Introduciamo ora il teorema di Taylor con resto di Peano, che ci permette di approssimare la
funzione y f (x) in un intorno di x0 con funzioni polinomiali di grado sempre maggiore.
Ricordiamo, che approssimare una funzione con un polinomio è un vantaggio, poiché le funzioni
polinomiali sono più semplici da trattare.
Teorema di Taylor con resto secondo Peano: Sia f : [a, b] , derivabile n – 1 volte in
x0 [a, b] . Se esiste in x0 la derivata n – esima, allora vale il seguente limite:
lim
x x0
f ( x)
f
(k )
( x0 )
( x x0 ) k
k!
k 0
0
( x x0 ) n
n
Cioè vale:
f ( k ) ( x0 )
( x x0 ) k o ( x x0 ) n per x x0
k!
k 0
( 0)
Dove con f ( x 0 ) indichiamo f ( x 0 ) .
n
f ( x)
(*)
La formula (*) è detta polinomio di Taylor con resto secondo Peano centrata in x0 e arrestata al
grado n.
69
Se x0 0 si parla di sviluppo di Taylor con resto di Peano centrato nell’origine e arrestato al
grado n, o più semplicemente sviluppo di MacLaurin arrestato al grado n.
Il resto secondo Peano non è altro che l’errore che si commette approssimando f con il polinomio
n
f ( k ) ( x0 )
( x x 0 ) k ed è qualcosa che va a 0 più velocemente di ( x x 0 ) n .
di Taylor
k
!
k 0
Esempio: Il limite notevole della funzione seno:
sen( x) x o( x) per x 0
non è altro che il polinomio di Taylor centrato nell’origine arrestato al grado 1. Infatti:
sen( x)
sen(0)
sen' (0)
0
cos(0)
( x 0) 0
( x 0)1 o( x 0)1 1
x o( x ) x o( x) per x 0
0!
1!
1
1
Se avessimo voluto proseguire derivando ulteriormente il seno, avremmo trovato che
D 2 sen(0) sen(0) 0 e quindi:
sen( x) x
sen(0)
( x 0) 2 o( x 0) 2 x o( x 2 ) per x 0
2!
Questo dimostra che, in realtà, l’errore commesso approssimando il seno con un polinomio di primo
grado è ancora più piccolo di quanto ci aspettavamo! Ma se avessimo voluto proseguire ancora,
avremmo dovuto calcolare la derivata terza della funzione seno in 0: D 3 sen(0) cos(0) 1 da
cui:
sen(0)
cos(0)
x3
2
3
3
sen( x) x
( x 0)
( x 0) o( x 0) x
o( x 3 ) per x 0
2!
3!
6
Grazie allo sviluppo di MacLaurin abbiamo approssimato il seno con un polinomio di terzo grado
centrato nell’origine.
Proseguendo a derivare avremmo scritto qualcosa di simile:
sen( x) x
x3 x5 x7
o( x 7 ) per x 0 e così via…
3! 5! 7!
Graficamente ecco quello che succede aumentando il grado del polinomio di Taylor:
La funzione seno è tratteggiata. Notate come aumentando il grado del polinomio, esso diventa
sempre più simile al seno in un intorno di 0.
70
Come vedete, aumentando il grado del polinomio, aumenta la precisione dell’approssimazione in un
intorno dell’origine (i polinomi pari non esistono semplicemente perché le derivate di ordine pari
del seno coinvolgono la funzione seno stessa, che valutata in 0 ha come risultato 0… si guardino i
calcoli svolti sopra e si consideri che le derivate del seno hanno periodicità 4…).
Un analogo discorso vale per la funzione coseno: la funzione coseno, in un intorno di 0, può essere
approssimata dapprima con un polinomio di grado 0:
GRADO 0 cos( x ) 1 o(1) per x 0
Aumentando il grado del polinomio:
GRADO 1 cos( x ) 1 o( x) per x 0
x2
GRADO 2 cos( x ) 1
o( x 2 ) per x 0
2
71
x2
o( x 3 ) per x 0
2
x2 x4
GRADO 4 cox( x) 1
o( x 4 ) per x 0
2
4!
E così via…
Semplicemente, notiamo come il polinomio di Taylor con resto di Peano arrestato all’ordine 1 sia
proprio la prima formula dell’incremento finito:
1
f ( k ) ( x0 )
( x x 0 ) k o( x x0 ) f ( x 0 ) f ' ( x0 )( x x0 ) o( x x 0 ) per x x0
k!
k 0
La dimostrazione di questo teorema è per induzione sul grado del polinomio di Taylor (cioè sul
numero di volte in cui la funzione è derivabile. Occorrerà dimostrare il limite nell’enunciato del
teorema ricorrendo al Teorema di de l’Hopital. Chi ha voglia di provarci…
GRADO 3 cox( x) 1
A scopi puramente didattici vi rendo partecipi del fatto che esistono altri metodi per esprimere il
resto (l’errore) rimanente da un’approssimazione mediante polinomio di Taylor, non solo il resto
mediante gli o – piccoli. Tuttavia, gli altri teoremi di Taylor hanno differenti ipotesi e quindi si
utilizzano in ambiti diversi. Citiamo per esempio il Teorema di Taylor con resto secondo Lagrange
(che si rifà al teorema di Lagrange) e con resto integrale (che si riconduce al calcolo integrale).
Lo sviluppo di Taylor, inoltre, se esiste è unico.
Significato geometrico della derivata seconda – concavità e convessità
Una figura è convessa quando presi due punti qualunque al suo interno, esiste sempre un segmento
che li collega senza fuoriuscire dal perimetro della figura stessa. Viceversa, una figura si dica
concava. I due disegni sotto mostrano un esempio:
Per le funzioni questo non vale. Infatti, valgono le seguenti definizioni:
Def.: Sia f una funzione reale di variabile reale definita su un certo intervallo I . Si dice che f è
convessa in I se per ogni x, x1 , x 2 I tali che x1 x x 2 :
f ( x 2 ) f ( x1 )
f ( x)
( x x1 ) f ( x1 )
x 2 x1
Analogamente, f si dice concava in I se per ogni x, x1 , x 2 I tali che x1 x x 2 :
f ( x 2 ) f ( x1 )
f ( x)
( x x1 ) f ( x1 )
x 2 x1
Graficamente, una funzione si dice concava se presi a caso due punti ( x1 , f ( x1 )) e ( x 2 , f ( x 2 )) su di
essa, tutti i punti che si trovano tra di loro stanno al di sotto della retta passante per ( x1 , f ( x1 )) e
72
( x 2 , f ( x 2 )) . Se invece tutti i punti che si trovano tra quei due stanno al di sopra della secante
passante per ( x1 , f ( x1 )) e ( x 2 , f ( x 2 )) , la funzione è concava:
Fortunatamente per noi, grazie alla derivata seconda, siamo sempre in grado di definire quando una
funzione è concava e quando è convessa in un suo punto, cioè quando esiste almeno un suo intorno
in cui la funzione è convessa o concava, poiché, si può dimostrare, vale il seguente teorema:
Teorema: Sia f una funzione reale di variabile reale definita su un certo intervallo I, derivabile
due volte in punto x0 I . Allora:
f è convessa in x0 se e solo se f ' ' ( x 0 ) 0 ;
f è concava in x0 se e solo se f ' ' ( x 0 ) 0 .
Quindi la derivata seconda ci permette di stabilire qualora f sia concava o convessa in un
determinato punto (cioè se quel punto si trova in una regione del grafico della funzione ove f è
convessa o concava…). Lo stesso ragionamento vale su un intervallo:
Teorema: Sia f una funzione reale di variabile reale definita su un certo intervallo I, derivabile
due volte in I . Allora:
f è convessa in I se e solo se f ' ' ( x) 0 per ogni x di I ;
f è concava in I se e solo se f ' ' ( x) 0 per ogni x di I .
Analogamente, le definizioni stesse di convessità e quella di concavità, rigirate, ci permettono di
avere un altro significato geometrico di convessità e concavità, ricorrendo alla derivata prima.
Infatti, vale il seguente teorema:
Teorema: Sia f una funzione reale di variabile reale definita su un certo intervallo I, derivabile
due volte in I . Allora:
f è convessa in I se e solo se x, x0 I f ( x) f ( x 0 ) f ' ( x0 )( x x0 )
f è concava in I se e solo se x, x0 I f ( x) f ( x 0 ) f ' ( x0 )( x x 0 )
Graficamente, significa che tracciando la tangente in un punto x0 del grafico della funzione f, la
funzione rimane sempre al di sopra della tangente se è convessa, al di sotto se è concava:
73
Punti di flesso
Abbiamo visto che negli estremanti, per il teorema di Fermat, la derivata è nulla, ma abbiamo detto,
portando l’esempio della funzione f ( x) x 3 , che non sempre vale il viceversa. Infatti, per questa
funzione, la derivata prima è nulla nell’origine, ma 0 non è un punto di massimo e nemmeno uno di
minimo. Che tipo di punto è, allora?
Def.: Sia f : ( x 0 ; x 0 ) derivabile una volta in x0 . Si dice che x0 è un punto di flesso
x ( x 0 , x0 )
f ( x ) f ( x0 ) f ' ( x0 )( x x0 )
ascendente se
per
;
x ( x0 , x 0 )
f ( x ) f ( x0 ) f ' ( x0 )( x x0 )
Si dice che x0 è un punto di flesso discendente se
x ( x 0 , x0 )
f ( x ) f ( x0 ) f ' ( x0 )( x x 0 )
per
.
x ( x0 , x 0 )
f ( x ) f ( x0 ) f ' ( x0 )( x x 0 )
In un punto di flesso non richiede che la derivata prima può non essere nulla. Graficamente, un
flesso, è un punto in cui la concavità della funzione cambia. Sempre graficamente, un flesso si dice
ascendente se in quel punto la funzione passa da concava a convessa (cioè passa da sotto a sopra il
grafico della tangente nel punto di flesso), mentre un flesso è discendente se in quel punto la
funzione passa da convessa a concava (cioè passa da sopra a sotto il grafico della tangente in quel
punto).
Le figure nella pagina accanto mostrano degli esempi di flessi ascendenti e discendenti.
Specifichiamo, però, che la distinzione tra i due tipi di flessi non è necessariamente importante.
Spesso, un punto, se è un flesso, si dice semplicemente che è un punto di flesso, senza specificare di
che tipo.
74
Nel caso di prima, f ( x) x 3 presenta un flesso ascendente nell’origine: infatti, in O la derivata
prima è nulla, ma la funzione passa da sotto a sopra il grafico della retta tangente nell’origine.
In particolare, la retta tangente al grafico di questa
funzione, nel suo punto di flesso è orizzontale. Ecco
perché si dice che l’origine, per f , è un punto di
flesso a tangente orizzontale (in questo caso è
anche ascendente).
Analogamente, la sua funzione inversa, g ( x) 3 x cambia concavità nell’origine. Ma questa volta,
g non è derivabile nell’origine. In ogni caso, si estende la definizione anche a questo tipo di flessi,
che vengono chiamati flessi a tangente verticale (poiché il punto di flesso è un punto di non
derivabilità a tangente verticale). Ecco il grafico di g ( x) 3 x , osservare il flesso.
Chiaramente, essendo la tangente al grafico di
questo tipo di funzioni verticale, non è possibile
applicare le definizioni di flesso ascendente e
discendente (infatti, anche se la funzione
dell’esempio passa dall’origine cambiando da
convessa a concava, passa da destra a sinistra il
grafico della retta, e non da sopra a sotto, come
invece è richiesto dalla definizione). Pertanto, i
punti di flesso a tangente verticale non possono
essere distinti in flessi ascendenti e discendenti.
Come distinguiamo i punti di flesso? Ancora una volta ci appare in soccorso la derivata seconda,
come suggerisce il seguente teorema:
75
Teorema: Sia f una funzione reale di variabile reale definita su I, intervallo. Sia x0 I un flesso,
allora f ' ' ( x 0 ) 0 .
Ovvero, i punti di flesso hanno derivata seconda nulla. Purtroppo, anche in questo caso, così come
per il teorema di caratterizzazione delle funzioni costanti, il viceversa non è valido, come
mostreremo nell’ultimo paragrafo di questo capitolo.
Asintoti
Studiando le iperboli siamo entrati in contatto per la prima volta con la nozione di retta asintotica.
Una retta asintotica per una funzione f è semplicemente una retta che definitivamente è vicina ad f
senza mai raggiungerla del tutto.
Esistono tre tipi di asintoti:
Def.: Sia f una funzione reale di variabile reale definita su I, intervallo. Sia x0 . Si dice che la
retta x x 0 è asintoto verticale per f in x0 se:
lim f ( x ) .
x x0
Si dice che la retta y L è asintoto orizzontale per f se:
lim f ( x) L .
x
Infine, si dice che la retta y mx q è asintoto obliquo per f se:
lim f ( x) mx q 0 .
x
Esempi di funzioni con asintoti sono:
1
h( x )
che ha un asintoto verticale in x0 0 e un asintoto orizzontale, corrispondente all’asse
x
x. Come riconoscere un asintoto verticale? Basta cercare gli zeri del denominatore e
successivamente verificare che la definizione di asintoto verticale è rispettata, cioè che almeno uno
dei due limiti – destro e/o sinistro – della funzione per x x0 vada all’infinito.
Non è così facile, invece, riconoscere un asintoto orizzontale.
Per quanto riguarda gli asintoti obliqui, il discorso è ancora più fine, ma possiamo introdurre questo
teorema di caratterizzazione degli asintoti obliqui:
Teorema: Sia f una funzione reale di variabile reale definita su I, intervallo. La retta y mx q è
asintoto obliquo per f se e solo se esistono finiti i seguenti limiti:
f ( x)
m;
lim
x
x
lim f ( x) mx q .
x
Dimostrazione: Assumiamo per ipotesi che y mx q sia asintoto obliquo di f. Allora, per
definizione:
lim f ( x) mx q 0
x
76
Dividiamo tutto per x:
f ( x) mx q
f ( x ) mx q
f ( x)
q
f ( x)
lim
lim
lim
m lim
m0
x
x
x
x
x
x x x
x x x
f ( x)
m.
Da cui: lim
x
x
Quindi, torniamo a lim f ( x) mx q 0 , ricaviamo lim f ( x) mx q .
x
x
Ora, dobbiamo ipotizzare che valgono i due limiti e dimostrare che la retta y mx q è asintoto
obliquo per f.
Se valgono i due limiti, in particolare vale il secondo, e si ha lim f ( x) mx q da cui
x
lim f ( x) mx q 0 , quindi la retta considerata è, per definizione, un asintoto obliquo.
x
Cvd
Se m = 0 notiamo che, se q è un valore finito, siamo in presenza di un asintoto orizzontale y = q.
Teorema unificatore della teoria degli estremanti e dei flessi
Concludiamo il capitolo esponendo un teorema che ci permette di stabilire (specialmente ricorrendo
agli sviluppi di Taylor, o più in generale alle derivate) se un punto x0 nel dominio di una funzione è
un estremante, un flesso e di che tipo:
Teorema: Sia f : ( a, b)
derivabile almeno due volte in un punto x0 . Valga:
( n 1)
f ' ( x 0 ) f ' ' ( x0 ) ... f
( x0 ) 0 (cioè siano tutte le derivate in x0 fino alla derivata n –
(n)
esima) e sia f ( x0 ) 0 :
(n)
Se n è pari, x0 è un estremante. Con esattezza, se f ( x0 ) 0 allora è un punto di minimo,
(n)
se f ( x0 ) 0 allora è un massimo.
(n)
Se n è dispari, x0 è un flesso. Con esattezza, se f ( x0 ) 0 allora è un flesso ascendente a
(n)
tangente orizzontale, se f ( x0 ) 0 allora è un flesso discendente a tangente orizzontale.
Questo teorema stabilisce un’importante collegamento tra i punti estremanti, flessi e derivate.
Infatti, ci dice che possiamo stabilire la natura di un punto in cui la derivata prima è nulla
continuando a derivare in quel punto finché non troviamo una derivata non nulla.
Se cade l’ipotesi in cui la derivata prima è nulla, questo teorema continua a valere, nel senso che se
la derivata prima non è nulla, chiaramente il punto non è un estremante, ma può ancora essere un
flesso. Possiamo riadattare il precedente teorema, allora, in questo modo:
Teorema: Sia f : ( a, b)
derivabile almeno due volte in un punto x0 . Valga: f ' ( x 0 ) 0 ,
( n 1)
f ' ' ( x 0 ) ... f
( x 0 ) 0 (cioè siano tutte le derivate in x0 dalla seconda fino alla derivata n –
(n)
esima) e sia f ( x0 ) 0 :
Se n è pari, x0 non è un flesso.
77
(n)
Se n è dispari, x0 è un flesso. Con esattezza, se f ( x0 ) 0 allora è un flesso ascendente,
(n)
se f ( x0 ) 0 allora è un flesso discendente.
Conclusioni
Con questo capitolo si conclude tutto il discorso sull’approssimazione delle funzioni mediante
polinomi. Abbiamo visto come la derivazione può portarci ad un completo studio di funzioni e
risolve il problema di stabilire la natura dei punti e l’andamento di una funzione.
Nel prossimo capitolo andremo a studiare, invece, il procedimento opposto a quello di derivazione,
cioè l’antiderivazione (dall’inglese antiderivate, termine tradotto con primitiva) o ricerca delle
primitive di una funzione.
Abbiamo visto come la derivazione, se vogliamo, è un concetto puntuale, che permette di passare da
una funzione definita globalmente su un intervallo allo studio di questa in un intorno di un suo
singolo punto mediante approssimazione che ricorre all’uso di funzioni polinomiali. La derivazione
è quindi un passaggio dal globale al particolare e abbiamo stabilito un’infinità di formule e regole
che ci permettono, bene o male, di derivare qualunque funzione esprimibile in termini finiti, cioè
come composizione di una quantità finita di funzioni elementari (si usa anche il termine scrivibile
in forma analitica). E abbiamo anche visto come la derivata sia unica per ogni funzione.
Per esempio, non siamo in grado di determinare la derivata di x!. Non perché tale funzione non sia
derivabile, ma perché la sua derivata non si può scrivere in forma analitica.
Abbiamo visto anche come graficamente la derivata rappresenti la retta tangente alla curva in un
suo punto. Ma allora, se al posto di derivare una funzione cercassi la funzione che ha per derivata
una funzione data (cioè se cercassi la primitiva), cosa otterrei graficamente?
Arriveremo al sorprendente risultato che il calcolo integrale (cioè il calcolo delle primitive)
coincide con il calcolo delle aree sottese dai grafici delle funzioni.
È altresì importante ricordare che alcuni risultati, come il Teorema di caratterizzazione delle
funzioni costanti sono definiti per funzioni definite a loro volta su un unico intervallo e abbiamo
notato come questi teoremi perdano di validità se le funzioni vengono definite su un’unione di
intervalli. Per la maggior parte del prossimo capitolo tratteremo unicamente di funzioni definite su
un solo intervallo.
Concludiamo il capitolo, definitivamente con questo teorema, grazie al quale possiamo dire che
alcune funzioni non sono derivata di alcuna funzione:
Teorema: Sia f : [ x0 , x 0 ]
continua nel suo insieme di definzione e derivabile in
( x 0 , x 0 ) . Se x0 è un punto di discontinuità per f ' ( x) , allora è obbligatoriamente di
seconda specie.
1
2
x0
x cos
x per
Esempio: La funzione così definita: f ( x)
.
x0
0
1
1
Questa è una funzione continua su tutto l’asse reale e la sua derivata è f ' ( x) 2 x cos sen , che
x
x
ha una discontinuità di seconda specie nell’origine. Infatti, usando questa funzione non si può
calcolare f ' (0) . Ma la derivata in 0 esiste: basti calcolare il rapporto incrementale e passare al
limite per scoprire che f ' (0) 0 . Questo perché la derivata f’ si comporta in un intorno di 0 come
una funzione che oscilla infinite volte.
78
Capitolo 8 – Primitive
Cominciamo adesso a trattare l’argomento opposto rispetto alla derivazione: il passaggio da una
derivata alla funzione che l’ha “generata”.
Se da una parte la derivazione rappresenta un’approssimazione di una funzione in un intorno di un
suo punto come una retta tangente in quel punto, l’antiderivazione (un inglesismo che significa
“ricerca delle primitive”) è completamente il contrario e se la derivazione comporta il passaggio dal
generale al particolare (vedi conclusioni capitolo 6), l’antiderivazione coinvolge il passaggio
contrario ed è, pertanto, qualcosa di molto più complicato e, dato il famoso masochismo dei
matematici, più interessante.
D’altra parte, per il calcolo delle derivate esistono tantissime formule e regole che rendono possibile
calcolare la derivata di una qualunque funzione ci salti in mente. Purtroppo questa “proprietà” non è
più valida per le antiderivate. Tanto per cominciare, per l’ultimo teorema del capitolo precedente,
molte funzioni che sono derivabili non ammettono una funzione che le abbia come derivate a loro
sen( x)
x cos( x ) sen( x)
volta. Per esempio, la funzione f ( x)
ha come derivata f ' ( x)
, mentre
x
x2
sen( x)
sen( x)
non esiste una funzione F tale che F ' ( x)
. Questo perché
ha una discontinuità di
x
x
sen( x)
terza specie in 0. Quindi, in forza del teorema sulla discontinuità della derivata,
non può
x
essere la derivata di qualsivoglia funzione.
Definiamo allora:
Def.: Sia f : I , I intervallo. Si dice che una funzione F è una primitiva di f se:
F è derivabile in I (quindi è anche continua in I);
F ' ( x) f ( x) per ogni x di I.
Le condizioni devono valere entrambe perché una funzione possa essere considerata una primitiva.
Vedremo esempi, specialmente per funzioni definite a tratti, in cui la primitiva non è facile da
determinare appunto per questa parte della definizione.
Esempio: Considerando la funzione f ( x) 2 x . Ci proponiamo di cercare una primitiva per questa
funzione. Noi sappiamo che F ( x) x 2 ha come derivata proprio f (x) . Allora ci chiediamo se è
vero che F ( x) x 2 è l’antiderivata di f. Cioè:
F ( x) x 2
Derivando Antiderivando ?
f ( x) 2 x
La risposta è semi – affermativa, nel senso che F ( x) x 2 non è l’unica primitiva di f: infatti,
1
2
consideriamo le funzioni G ( x) x 2 20000000 e H ( x) x
. Anche le loro derivate
100000
sono pari a f. Sembrerebbe, quindi, che se la primitiva esiste, non è unica. Questo particolare è
dovuto al fatto che derivando una costante additiva si ottiene 0 e che quindi antiderivare una
79
funzione y f (x) significa trovare una primitiva per y f ( x) 0 .
Le primitive per una funzione, allora, sembrano essere infinite, ognuna delle quali differisce
dall’altra per una costante additiva. Grazie al seguente teorema possiamo, dunque, asserire che una
volta trovata una primitiva, le abbiamo trovate tutte. Infatti:
Teorema di “unicità” della primitiva: Sia f : I , I intervallo. Siano F e G due primitive di f,
allora G ( x) F ( x) C con C costante reale. E inoltre tutte e sole le primitive di f sono in questa
forma (differiscono, cioè, tra loro per una costante additiva).
Dimostrazione: Siano F e G due primitive di f.
Consideriamo la funzione H ( x) G ( x) F ( x ) . La derivata di questa funzione sappiamo calcolarla
ed è:
H ' ( x) G ' ( x ) F ' ( x) f ( x) f ( x ) 0
Fondamentale è l’ipotesi per la quale f è definita su un intervallo I . Questo perché, a questo
punto, per il teorema di caratterizzazione delle funzioni costanti, una funzione che ha derivata nulla
è una funzione costante e quindi: H ( x ) C con C costante reale.
Ma allora
H ( x) G ( x) F ( x ) C G ( x) F ( x) C
Per la generalità con cui sono state scelte F e G, concludiamo che tutte e sole le primitive di f
differiscono per una costante.
Cvd
Indichiamo con il simbolo
f ( x)dx l’insieme di tutte le primitive della funzione
f ( x)dx : F F ' ( x) f ( x) , F continua in I
f:
Quel dx è il differenziale della funzione f anche se per il momento è da intendere come un simbolo
e nulla più. La funzione f è detta funzione integranda e x è detta variabile di integrazione.
Il simbolo f ( x )dx è detto integrale indefinito di f(x). Nel prossimo capitolo chiariremo il perché
si usi questo termine.
Chiaramente f ' ( x )dx f ( x) C .
Con un terribile abuso di notazione, scriviamo anche che D f ( x) dx f ( x ) . È un abuso di
notazione perché f ( x )dx è definito come un insieme di funzioni e non si può fare la derivata di
un insieme. Ma la notazione ha senso logico e quindi la si usa.
Integrale di funzioni elementari
Cominciamo dicendo che
x dx
Per 1 abbiamo:
x 1
C per ogni 1 ovviamente.
1
1
x dx
La funzione integranda, in questo caso, non è definita su un unico intervallo, ma sull’unione degli
intervalli: (,0) (0,) . Pertanto, il teorema di “unicità” della primitiva non è più valido. Su
questi due intervalli differenti, la funzione ha primitive diverse:
80
ln x C1
x0
x0
2
Ove le due costanti sono diverse. Quindi, sui due intervalli separati, la funzione f ha primitive
diverse. Ma se consideriamo solo la funzione f su uno dei due intervalli, il teorema vale ancora.
1
Infatti, su (,0) tutte e sole le primitive di
sono nella forma ln( x) C 2 (idem per l’altro
x
intervallo). Ma dato che le costanti possiamo prenderle come vogliamo, possiamo presumere di
x0
ln x C
1
prendere la stessa costante per entrambi gli intervalli: dx
per
. Questa
x0
x
ln( x) C
1
primitiva si può riassumere così: dx ln x C .
x
1
x dx ln( x) C
x
x
Calcoliamo ora e dx e C ovviamente.
Per quanto riguarda le funzioni goniometriche:
sen( x)dx cos( x) C
cos( x)dx sen( x) C
1
cos
2
dx (1 tg 2 x )dx tg ( x ) C
x
1
1 x 2 dx artg ( x) C
1
1 x2
1
per
dx arsen( x) C ar cos( x) C
dx ar cos( x ) C arsen( x) C
1 x2
1
2
sen 2 x dx (1 cot g x)dx cot g ( x) C
Proprietà delle primitive
Così come lo erano le derivate, anche il calcolo delle primitive si avvale di una legge lineare:
Sempre con un abuso di notazione scriviamo che:
f ( x) g ( x)dx f ( x)dx g ( x)dx
additività dell’integrale
Infatti non si può fare la somma tra due insiemi. Tuttavia, questa somma è da intendere come la
“somma tra le funzioni primitive”.
Per esempio:
2
2
3
3x 6 dx 3x dx 6dx x 6 x C
Sempre con un “pessimo” abuso di notazione diremo che:
k f ( x)dx k f ( x)dx omogeneità dell’integrale
Esempio:
9
dx
x dx 9 x 9 ln x C
Queste regole derivano, come già detto, banalmente dalla linearità dell’operatore derivata.
Integrali immediati
Presentiamo ora un caso speciale della ricerca delle primitive attraverso il metodo per sostituzione,
di cui parleremo nei prossimi paragrafi. Questo tipo di antiderivazione permette di riconoscere
81
velocemente e calcolare primitive che presentano una funzione integranda formata dal prodotto di
una funzione qualunque per la derivata del suo argomento. Portiamo alcuni esempi e poi il caso
generale:
8x 7
dx . Notiamo che la funzione al numeratore è la derivata della
Calcoliamo la primitiva 2
4x 7x 1
funzione al denominatore. Allora, possiamo affermare che:
8x 7
1
2
4 x 2 7 x 1 dx 4 x 2 7 x 1 (8x 7)dx ln 4 x 7 x 1 C
Cioè, abbiamo calcolato la primitiva della funzione al denominatore come funzione logaritmica. Ma
nessuno ha mai detto (perché è falso) che la primitiva di una funzione che ha al denominatore un
1
dx artg ( x ) C .
polinomio di secondo grado è una funzione logaritmica. Banalmente
1 x2
1
Tuttavia, in questo caso, poiché la funzione
è moltiplicata per la sua derivata,
2
4x 7x 1
possiamo trattarla come fosse la derivata di una funzione logaritmica (questa regola discende, come
vedremo nel caso generale, dalla regola di derivazione della funzione composta).
Esempio: La primitiva cos( x 1)dx è il seno della funzione stessa. Questo perché nell’integrale è
tacitamente presente la derivata di x + 1, che è 1:
cos( x 1)dx 1 cos( x 1)dx sen( x 1) C
Ma se, invece, avessimo avuto cos(3 x 1)dx , la derivata non è più presente nella funzione
integranda. Poco male, però, perché possiamo aggiungerla noi moltiplicando all’interno del
logaritmo per 1:
3
cos(3x 1)dx 1 cos(3x 1)dx 3 cos(3x 1)dx
Applichiamo l’omogeneità dell’integrale e otteniamo:
3
1
3 cos(3x 1)dx 3 3 cos(3x 1)dx
Ora, nell’integrale è presente la derivata di 3x + 1, e quindi la primitiva di 3cos(3x + 1) non è altro
1
1
che: 3 cos(3 x 1)dx sen(3 x 1) C .
3
3
Questa “nuova proprietà delle primitive”, vale in generale. Si può, cioè, moltiplicare la funzione
integranda per una costante non nulla a patto di moltiplicare tutto l’integrale per il reciproco della
costante:
1
f ( x)dx k kf ( x)dx con k 0
6x6 1
dx .
( x 6 ln x)
x
Nella sua bruttezza, questo integrale nasconde una terribile facilità. Infatti, la derivata di x 6 ln x è
1
6x6 1
6 x 5 , cioè, facendo il denominatore comune,
. Quindi, possiamo vedere questo integrale
x
x
6x6 1
2
6
dx tg ( x 6 ln x) C .
come la primitiva di una tangente: 1 tg ( x ln x )
x
Infine, portiamo questi esempi:
1 tg
82
2
L’ultimo integrale è banale:
ln
1
x dx ln x x dx . In questo caso abbiamo una funzione moltiplicata
per la sua derivata. Allora possiamo trattare questo caso come se fosse la primitiva di x in dx:
ln
1
ln 2 x
x dx ln x x dx 2 C
Trattiamo allora il caso generale. Consideriamo una funzione composta f(g(x)) e la derivata
dell’argomento di questa funzione g’(x). Allora l’integrale di questa funzione si ottiene dalla
derivata della funzione composta:
Df ( g ( x)) f ' ( g ( x)) g ' ( x) Df ( g ( x))dx f ' ( g ( x )) g ' ( x )dx f ( g ( x)) C f ' ( g ( x)) g ' ( x)dx
Cambiando nome alla funzione f, in modo da esplicitare la primitiva otteniamo:
f ( g ( x )) C f ' ( g ( x)) g ' ( x )dx
f ( g ( x)) g ' ( x) dx F ( g ( x)) C
Da cui ricaviamo questi sottocasi notevoli:
f ( x)
f ' ( x)dx
f ( x) 1
C con 1
1
f ' ( x)
dx ln f ( x) C
f ( x)
senf ( x) f ' ( x)dx cos f ( x) C
cos f ( x) f ' ( x)dx senf ( x) C
e f ' ( x)dx e C
f ( x)
f ( x)
Primitive per parti
Questo nuovo metodo di antiderivazione deriva dalla regola di derivazione del prodotto. È un
metodo, tuttavia, che non permette di risolvere un integrale, ma di renderlo più semplice da trattare.
Ci viene in soccorso quando dobbiamo cercare la primitiva del prodotto di due funzioni, di cui
dobbiamo conoscere, almeno per una delle due, la primitiva:
Regola di integrazione per parti:
Consideriamo l’integrale f ( x) g ( x)dx . Sia F(x) la primitiva di una delle due funzioni (per
esempio di f ) e sia g’(x) la derivata dell’altra. Allora vale la seguente uguaglianza:
f ( x) g ( x)dx F ( x) g ( x) F ( x) g ' ( x)dx
Dimostrazione:
Deriviamo il prodotto f ( x) g ( x) e otteniamo:
Df ( x) g ( x) f ' ( x) g ( x) f ( x) g ' ( x)
Integriamo da entrambe le parti:
83
Df ( x) g ( x)dx f ' ( x) g ( x) f ( x) g ' ( x)dx
f ( x ) g ( x)
f ' ( x) g ( x)dx f ( x) g ' ( x)dx
Portando uno dei due integrali a sinistra dell’uguale e cambiando il nome delle funzioni si ha
l’asserto.
Cvd
Esempio: Cerchiamo la primitiva x cos( x)dx . Riconosciamo che la derivata di x è 1 e che la
primitiva del coseno è il seno. Quindi, condiseriamo:
x cos( x)dx g ( x) f ( x)dx
Ove
f ( x ) cos( x) F ( x) sen( x)
g ( x) x g ' ( x) 1
Quindi:
x cos( x)dx g ( x) f ( x)dx F ( x) g ( x) F ( x) g ' ( x)dx xsen( x) sen( x)dx
xsen( x) cos( x) C
Notiamo che la nuova primitiva è più semplice da calcolare dal punto di vista computazionale, ma
la regola di integrazione per parti non ci ha permesso di rimuovere del tutto l’integrale, l’ha solo
trasformato in qualcosa di più semplice da integrare.
Integrazione per parti mediante la legge di trasformazione dei differenziali
Nel capitolo precedente abbiamo ricavato, parlando del differenziale, la formula
df ( x) f ' ( x )dx .
Questa formula è nota come legge di trasformazione dei differenziali e permette di calcolare
l’incremento della variabile dipendente dopo uno spostamento infinitesimo da x a x dx .
In realtà, la sua utilità, almeno per noi, è legata al calcolo delle primitive. Infatti, il significato di
questa legge può essere riassunto nel modo seguente (in questi due enunciati ho modificato il nome
delle funzioni solo per far capire bene il concetto):
Legge di trasformazione dei differenziali:
Poiché vale: df ( x) f ' ( x )dx , posso leggere l’uguaglianza da destra a sinistra o da sinistra a destra
indifferentemente. Quindi:
Posso portare una funzione dentro il dx se la integro: f ( x) dx dF ( x) .
Posso portare una funzione fuori dal dx se la derivo: df ( x) f ' ( x )dx (nella d rimane la
variabile rispetto alla quale sto integrando, quindi, nel nostro caso, la x).
Pertanto possiamo riscrivere la regola di integrazione per parti nel modo seguente:
f ( x) g ( x)dx g ( x)dF ( x) F ( x) g ( x) F ( x)dg ( x)
Che abbrevieremo omettendo le x: gdf fg fdg . Dal punto di vista computazionale è molto
più veloce, voi capite, infatti, basta portare una delle due funzioni nella d integrandola, poi
moltiplico tra di loro le funzioni ottenute e sottraggo l’integrale in cui scambio il ruolo delle
funzioni.
x
Esempio: xe dx . Quando abbiamo un integrale in cui una delle due funzioni è x, dobbiamo, a
meno di casi migliori, utilizzare la regola di integrazione per parti e integrare l’altra funzione. Il
motivo è che nel nuovo integrale ottenuto, avremo che la x finisce dopo la d. Ma chiaramente,
84
quindi non resterà altro che dx, cioè l’integrale solito che sappiamo calcolare. Questo esempio
chiarisce le idee:
x
x
x
x
x
x
xe dx xde xe e dx xe e C
Il vantaggio di questo metodo è che non occorre utilizzare quella noiosa tabellina che ci siamo
dovuti costruire nella “normale” integrazione per parti.
Primitive per sostituzione
Quest’altra regola di antiderivazione deriva dal calcolo della derivata di una funzione composta, ed
è una generalizzazione del caso degli integrali immediati:
Regola di integrazione per sostituzione:
Consideriamo l’integrale f ( g ( x)) g ' ( x )dx . Allora possiamo porre g ( x) t e otteniamo:
f ( g ( x)) g ' ( x)dx f (t )dt
La dimostrazione è banale, basti scrivere la regola di derivazione della funzione composta,
modificare il nome delle funzioni ed infine integrare.
Letta da sinistra a destra, è una rilettura della regola di derivazione degli integrali immediati. Infatti,
per esempio, calcoliamo:
2x
2
1 x 2 dx x t x t .
Quindi:
2x
2
1 x 2 dx x t x t
2x
1
2
1 x 2 dx 1 t dt ln 1 t C ln 1 x C
Ma se, per esempio, volessimo risolvere questo tipo di integrali:
sen x dx
In cui, cioè, non è presente la derivata della funzione che sta nell’argomento (in questo caso) del
seno, allora dobbiamo ricorrere ad una sostituzione:
2
sen x dx x t x t
In questo caso dobbiamo per forza utilizzare la legge di trasformazione dei differenziali. Infatti,
otteniamo, in seguito alla sostituzione:
2
sen x dx x t x t
2
sen x dx sen(t )d (t ) 2t sen(t )dt
A questo punto si integra per parti:
2t sen(t )dt 2 t sen(t )dt 2 t d ( cos(t )) 2 t cos(t ) cos(t )dt
2t cos(t ) 2 cos(t )dt 2t cos(t ) 2sen(t ) C 2 x cos x 2 sen x C
85
Integrazione di funzioni razionali fratte
Una funzione razionale fratta è una frazione il cui numeratore e il cui denominatore sono polinomi:
P( x)
f ( x)
Q( x)
Ove con deg P ( x) e deg Q( x) sono indicati i gradi dei polinomi in questione.
Per ora, consideriamo deg P ( x) e deg Q( x) al massimo uguali a 2.
Distinguiamo i vari casi:
Caso 1: deg P ( x) deg Q( x) 1
ax b
dx . In questo caso ci basta risolvere
In questo caso abbiamo a che fare con la primitiva
cx d
l’integrale in questo modo:
ax b
ax
b
cx d dx cx d dx cx d dx
Ora risolviamo con i metodi che già conosciamo:
ax
b
x
1
a cx 0
b
c
cx d dx cx d dx a cx d dx b cx d dx c cx d dx c cx d dx
a cx d d
b
a cx d
a
d
b
dx ln cx d C
dx
dx ln cx d C
c
cx d
c
c cx d
c cx d
c
a
ad
c
b
a
ad
b
1 dx 2
dx ln cx d C x 2 ln cx d ln cx d C
c
c
c
c
c cx d
c
a
cb ad
x
ln cx d C
2
c
c
Altrimenti, basta dividere ax + b con cx + d. Il risultato è analogo.
Caso 2: deg P ( x) 2 , deg Q(x) = 1
ax 2 bx c
dx . Possiamo qui spezzare l’integrale in due parti:
Per risolvere una primitiva del tipo
mx q
ax 2 bx c
ax 2
bx c
dx
mx q
mx q dx mx q dx
Risolviamo separatamente i due integrali e poi uniamo le soluzioni:
ax 2
x2
a m2 x2 q2 q2
a m2 x2 q2
a
q2
dx
a
dx
dx
dx
dx
mx q
mx q
mx q
m2
m 2 mx q
m 2 mx q
a
m2
(mx q )(mx q )
aq 2
dx
mx q
m2
1
a
aq 2
dx
(
mx
q
)
dx
ln mx q C1
mx q
m2
m3
aq 2
a x2
3 ln mx q C1
m
qx
m 2 2
m
Il secondo, ricorrendo alla formula ricavata nel caso precedente:
bx c
a
mc bq
mx q dx m x m 2 ln mx q C 2
Da cui:
aq 2 mc bq
ax 2 bx c
a mx 2
ax
mx q dx m 2 2 qx m 3 m 2 ln mx q m C
86
Chiaramente non sono le formule a dover essere imparate, ma il procedimento.
Caso 3: deg P ( x) 1 , deg Q(x) = 2
Impariamo a risolvere integrali del tipo:
ax
mx q
dx .
bx c
2
Questo tipo di integrali si risolve ricorrendo in modo del tutto naturale alla scomposizione del
polinomio al denominatore in polinomi di grado minore qualora sia possibile.
Noi sappiamo che un polinomio di secondo grado è scomponibile come:
ax 2 bx c a ( x x1 )( x x 2 )
Ove x1 e x 2 sono le due soluzioni dell’equazione ax 2 bx c 0 .
Sappiamo che il numero di soluzioni di questa equazione dipende dal . Quindi dobbiamo
distinguere tre diversi casi, a seconda del numero di soluzioni dell’equazione omogenea associata al
denominatore.
Sottocaso 3.1: 0
Se 0 allora l’equazione ax 2 bx c 0 ha due soluzioni reali che si calcolano con la solita
formula. In presenza di due soluzioni reali possiamo scomporre il denominatore come:
ax 2 bx c a ( x x1 )( x x 2 )
mx q
1
mx q
mx q
dx
dx .
dx diventa
In tal caso, l’integrale 2
a ( x x1 )( x x 2 )
a ( x x1 )( x x 2 )
ax bx c
mx q
Per risolvere questo tipo di integrali occorre spezzare la frazione
come somma di
( x x1 )( x x2 )
due frazioni, risolvendo l’identità (ovviamente x1 e x1 non sono entrambe nulle):
A( x x 2 ) B ( x x1 ) x( A B ) Ax 2 Bx1
mx q
A
B
( x x1 )( x x 2 ) x x1 x x 2
( x x1 )( x x 2 )
( x x1 )( x x 2 )
Ovviamente, questa identità è vera se il coefficiente davanti alle x del numeratore è lo stesso da
entrambe le parti e lo stesso deve valere per il termine noto. Ricaviamo A e B, cioè, dal seguente
sistema:
q mx 2
Am
x1 x 2
A B m
… facendo i calcoli…
(se x 2 x1 )
Ax 2 Bx1 q
B q mx 2
x1 x 2
m
q
A 2 2x
1
(se x 2 x1 )
B m q
2 2 x1
Sostituendo i valori di A e B nell’integrale si ha un facile asserto.
Sottocaso 3.2: 0
Quando il denominatore ha 0 vi è un unico zero all’equazione ax 2 bx c 0 . Sia esso x0 ,
2
possiamo scomporre il denominatore come a ( x x 0 )
87
mx q
mx q
dx .
dx assume allora la forma
a( x x0 ) 2
bx c
1 mx q
m
x
q
dx 2
dx ( x x 0 ) 2 dx .
Spezziamo l’integrale per linearità:
2
2
a ( x x0 )
a x 2 xx0 x 0
a
Il secondo integrale è immediato, mentre nel primo dobbiamo ricondurci ad avere al numeratore la
derivata del denominatore:
L’integrale
ax
2
(2 x 2 x0 )
xm
m (2 x 2 x0 ) 2 x0
2q
1
m
1
2q
1
dx
dx 0
dx
2
2
2
2
2
2a x 2 xx0 x0
a x x0 2a x 2 xx0 x 0
a ( x x0 )
a x x0
m
1
2 x m 2q
ln( x x 0 ) 2 0
C
2a
a x x0
a
2
Quindi quando il delta è nullo, ci si riconduce all’integrale del tipo ( x x0 ) dx 2
1
C .
x x0
Sottocaso 3.3: 0
Se 0 non si può scomporre il denominatore, in quanto non ha soluzioni reali. Il modo più
veloce per risolvere questo integrale è ricondursi ad avere al denominatore un quadrato perfetto:
facciamo un esempio:
2x 1
dx . Se scompongo il 10 come 9 + 1 ottengo al denominatore un quadrato
Calcoliamo 2
x 6 x 10
perfetto:
2x 1
2x 1
2x 1
2x
1
x 2 6 x 10dx x 2 6 x 9 1 dx ( x 3) 2 1 dx ( x 3) 2 1 dx ( x 3) 2 1 dx
Cercherò allora di ricondurmi ad avere, nel primo integrale, la derivata del denominatore a
numeratore:
(2 x 6) 6
1
2x 6
1
1
( x 3) 2 1 dx ( x 3) 2 1 dx x 2 6 x 10 dx 6 ( x 3) 2 1 dx ( x 3) 2 1 dx
2x 6
1
2
dx 5
dx
x 6x 9
( x 3) 2 1
Il secondo integrale lo vedo ora come l’integrale dell’arcotangente. Il primo, invece, è un semplice
logaritmo:
2x 6
1
2
x 2 6 x 10 dx 5 ( x 3) 2 1 dx ln( x 6 x 10) 5artg ( x 3) C
Esistono formule che permettono di calcolare l’integrale di funzioni razionali fratte di grado più
alto, che però non tratteremo.
Sostituzioni notevoli
Ci sono funzioni che è difficile integrare senza ricorrere a sostituzioni particolari. Citiamo tre casi
con altrettanti esempi:
Ci proponiamo di calcolare l’integrale
dx
sen(x) . In questo caso sono comode le formule
parametriche, che vale la pena di ricordare:
88
2t
2t
x
1 t2
t tg
,
, tg ( x)
cos(
x
)
2
2 con
2
2
1 t
1 t
1 t
L’integrale, perciò, diventa:
2
dx
1 t
1 t2
1
1
dx
sen( x) 2t d (2artg (t )) 2t 2 1 t 2 dt t dt ln t C sen( x) ln sen( x) C
sen( x)
1
dx . In questo caso operiamo una buona sostituzione ponendo 6 x t ,
x 3 x
ponendo, cioè, t M x , ove M è il minimo comune multiplo tra gli indici di radice (cioè tra 3 e 6).
1
1
t5
t4
t 4 11
t 4 1
1
6
dx
dt
6
dt
6
dt
6
dt
6
6 x 3 x
t t2
t (1 t )
1 t
t 1
t 1 dt 6 1 t dt
Calcoliamo ora
6
(t 1)(t 1)(t 2 1)
1
dt 6
dt 6 (t 3 t 2 t 1)dt ln 1 t
t 1
1 t
3
t 4 2t 3 3t 2 6t ln 1 t C
2
36 4
3
x 2 x 3 x 66 x ln 6 x C
2
In questo esercizio l’importante è la sostituzione. Per il resto sono conti, che probabilmente sono
anche sbagliati, ma l’importante, ripeto, è la sostituzione iniziale, che ci permette di ricondurre
l’integrale ad una razionale fratta molto semplice.
6
Ultimo caso, risolviamo l’integrale
1 x 2 dx . Questo esercizio viene bene se si applica la
sostituzione x cos(t ) o indifferentemente x sen(t ) . Questo perché la radice, grazie al teorema
fondamentale della goniometria verrà trasformata in una funzione goniometrica:
x cos(t )
2
1
x
dx
1 cos 2 (t ) d cos(t ) sen(t ) sen(t )dt
t ar cos( x)
Poiché l’arcocoseno è invertibile sono per angoli il cui seno è positivo, allota posso ragionare
togliendo il valore assoluto:
sen(t ) sen(t )dt sen 2 (t )dt
2 cos 2 (t ) 1
cos(
2
t
)
Ricordando che
indifferentemente, possiamo ricavare che
1 2 sen 2 (t )
1 cos( 2t )
sen 2 (t )
, che è una relazione importante che ci permette di scrivere:
2
cos(2t ) 1
1
1
1
1
1
1
sen 2 (t )dt
dt cos(2t ) dt t 2 cos(2t )dt t sen(2t ) t C
2
2
2
4
2
4
2
Risostituendo:
1
ar cos( x)
1
ar cos( x )
sen(2ar cos( x))
C sen( ar cos( x)) cos(ar cos( x ))
C
4
2
2
2
1
ar cos( x)
x 1 x2
C
2
2
89
Conclusioni
Per il momento abbiamo appurato che la ricerca delle primitive non è così semplice come derivare
una funzione. Abbiamo definito l’”integrale” di una funzione come l’insieme delle primitive ad essa
associate e abbiamo mostrato che questo insieme è costituito da una classe di funzioni che
differiscono per una costante additiva. Ma da dove deriva il termine “integrale”? come si applica la
ricerca delle primitive? Scopriremo che il simbolo di integrale è dovuto ad un altro grande problema
dell’analisi matematica e studieremo il teorema che lega le primitive alle derivate e grazie al quale
saremo autorizzati a “mischiare” i due termini.
90
Capitolo 8 – Aree e volumi: R–integrabilità
Cenni storici
La ricerca delle aree ha tenuto impegnati alcuni tra i più grandi matematici del mondo. Tra questi
citiamo Archimede di Siracusa, che riuscì a determinare l’area del cerchio con il suo “metodo di
esaustione”, che consiste nel considerare l’area del cerchio come l’area di un poligono regolare di
infiniti lati. Ora come ora non sembrerebbe, ma questo metodo fu innovativo nel 300 a.C., quando
ancora non si conosceva il concetto di limite.
Archimede calcolò l’area del cerchio inscrivendo in una circonferenza un poligono regolare di 3
lati, poi di 4, poi di 5, e così via. Mano a mano che il numero n dei lati aumentava, l’area del
poligono in funzione del raggio R della circonferenza, che oggi scriveremmo come
n
2
An R 2 sen
, tendeva ad assumere il valore A R 2 .
2
n
n 2 2
per
Un risultato che noi sapremmo calcolare come il limite della successione An R sen
2
n
n , ricorrendo al più semplice dei limiti notevoli:
2
2
R 2 sen
sen
n 2 2
n
n
2
Acerchio lim An lim R sen
R lim
R2
nlim
n
n 2
n
2
2
n
n
n
Un discorso analogo vale per i poligoni circoscritti (metodo di compressione).
Tuttavia, ben si può comprendere che cercare l’area di una curva come limite di una poligonale ad
essa inscritta (o circoscritta) è un procedimento lungo e non sempre facile da risolvere.
Ecco il problema a cui cercheremo di dare una risposta: come possiamo calcolare l’area sottesa da
una funzione e l’asse x?
La risposta più banale di tutte, a cui penserebbe anche un bambino è questa: consideriamo una
funzione f limitata e positiva.e costruiamo quella che si chiama una partizione P dell’intervallo
[a,b], cioè una suddivisione dell’intervallo di definizione in n sottointervalli. Poiché f è limitata, lo
è su ogni singolo sottointervallo, e di conseguenza, ammette massimo e minimo in ogni
sottointervallo. L’area del plurirettangolo inscritto nel grafico di f è data dalla somma delle aree
di tutti i rettangoli inscritti. Assumiamo f continua.
91
Senza ledere alla generalità del discorso, possiamo supporre i sottointervalli equispaziati tra loro.
ba
x , ove n è il numero di sottointervalli della
Ovvero, ogni sottointervallo ha ampiezza
n
partizione. A questo punto si avrà:
n
ba
f ( x) . Per la limitatezza di f , e per la sua
m :
min
APluriret tan golo mi
ove i x[ x , x ]
i
1
i
n
i 1
continuità, esiste un xi in ogni sottointervallo [ xi 1 , xi ] per i = 1, … , n, tale che f ( xi ) mi che non
necessariamente coincide con uno degli estremi dell’intervallo.
n
n
i 1
i 1
A questo punto riscriviamo: APluriret tan golo mi x f ( xi )x , che risulta essere
un’approssimazione dell’area della regione di piano delimitata da f , dall’asse x e dalle due rette
x = a e x = b.
Def.: Definiamo somme inferiori di f relative alla partizione P, la quantità:
n
f ( x)
m :
min
mi x ove i x[ x , x ]
i
1
i
i 1
L’idea è quella di aggiungere sempre più punti alla partizione (di fare cioè un raffinamento della
partizione P), in modo tale da aumentare il numero di sottointervalli, cioè aumentare n. Poiché il
numero di rettangoli che si formano in questo modo coincide con n, all’aumentare di n aumenta il
numero di rettangoli inscritti e quindi aumenta la precisione dell’approssimazione che stiamo
facendo.
Inoltre, possiamo creare l’insieme contenente le somme inferiori relative ad ogni n numero di
rettangoli inscritti.
Quando arriverò ad avere infiniti sottointervalli, cioè per n , l’area del plurirettangolo tende
all’area della suddetta regione di piano, che d’ora in poi chiameremo trapezoide di f relativo
all’intervallo [a,b] (T). L’insieme delle somme inferiori è quindi superiormente limitato e
b
chiamiamo integrale inferiore (lo indichiamo con
f ) il valore numerico di tendenza della
a
successione delle somme inferiori (per n ),
Analogamente si possono definire le somme superiori:
Def.: Definiamo somme superiori di f relative alla partizione P, la quantità:
n
M i x ove
M i= max { f ( x)}
x∈[ x i−1 , xi ]
i 1
Ovvero, coincidono con l’area del plurirettangolo circoscritto al trapezoide T , approssimiamo, cioè,
l’area di T per eccesso usando dei rettangoli. Analoghe considerazioni ci portano a dire che se il
numero di sottointervalli aumenta, aumenta anche il numero di rettangoli, che però si restringono
sempre di più, diminuendo di dimensioni.
Pertanto, è ancora vero che se n il plurirettangolo approssima l’area di T , ma la successione
delle somme superiori costituisce un insieme inferiormente limitato da un valore di tendenza che a
b
priori è diverso da
a
92
f che chiameremo integrale superiore e indicheremo con
b
f.
a
b
Non è sempre detto che
a
x Q [0,1]
1
f f . La funzione f (x) per
, nota come funzione di
x [0,1] \ Q
0
a
b
Dirichlet definita in [0,1], per le proprietà di densità di in , si ha che per ogni sottointervallo
che si crea esiste sempre almeno un numero razionale e uno reale. Quindi per ogni sottointervallo
n
mi 0 mi x 0 per ogni i, mentre M i 1 per ogni i e quindi
i 1
n
M x 1 . Quindi .
i
i 1
0=∫ f ≠∫ f =1
Integrale di Riemann – funzioni R – integrabili
Def.: Una funzione f definita su un intervallo a valori reali, limitata, si dice Riemann integrabile
(R – integrabile) se
b
a
b
In tal caso il valore comune di
a
f e
b
f f
a
b
b
f
viene indicato con
f ( x)dx
e prende il nome di
a
a
integrale definito di f relativo all’intervallo [a,b].
b
Il simbolo
f ( x)dx
assume ora un senso logico, seppur ancora disconnesso con il concetto di
a
primitiva. Il simbolo di integrale è la S della parola latina summa. Si tratta allora di un simbolo
che ci ricorda che stiamo sommando le aree degli infiniti rettangoli che si trovano nell’intervallo
ba
f ( x) f ( x)dx . Il senso pratico di questa scrittura lo
[a,b]. Aree che si calcolano come lim
n
n
abbiamo visto con il calcolo degli integrali per parti e sostituzione, anche se, ripeto, per ora sono
argomenti sconnessi.
Si può dimostrare che tutte le funzioni continue sono R – integrabili, così come tutte le funzioni
monotone. Anche se f presenta un numero finito di discontinuità di prima o terza specie, ed è
continua in ogni altro suo punto, è R – integrabile.
Ma ancora, nonostante queste considerazioni, non abbiamo ancora un metodo veloce per calcolare
le aree dei trapezoidi relativi ad ogni funzione. Inoltre, il parallelismo tra l’integrale di Riemann e le
aree lo abbiamo fatto solo nell’ipotesi che f fosse positiva. Cosa succederebbe se f fosse anche
n
per un certo intervallo del suo dominio? In tal caso i valori M i x e
i 1
n
m x sarebbero negativi
i 1
i
(poiché sarebbero negativi M i e mi ). Significa che le aree sotto l’asse x sono negative? Inoltre
anche x , per come è definito, può essere negativo (se prendiamo b<a). Come risolvere questi
problemi?
93
Aree con segno
Il primo problema lo risolviamo dicendo che le aree che calcoliamo integrando con Riemann non
sono aree in senso geometrico, ma aree con segno: consideriamo cioè negative le aree delle regioni
di piano situate al di sotto dell’asse delle ascisse. Positive quelle sopra. L’integrale di Riemann, se
in [a,b] f è sia positiva che negativa, assume il significato di una somma algebrica tra aree, ove le
aree al di sotto dell’asse x danno un contributo positivo e le altre negativo. Ipotizziamo che l’area
identificata con + sia uguale a 2 e quella identificata con il simbolo – sia uguale a 1:
L’area totale in [a,b] è 2 – 1 = 1.
Proprietà dell’integrale definito
Le proprietà che attribuiamo all’integrale definito sono del tutto analoghe a quelle che abbiamo
visto per gli integrali indefiniti. In questo caso, però, molte di esse avranno anche un senso
geometrico / analitico:
Proprietà: Siano f , g definite su [a,b] a valori reali, limitate, R – integrabili nel loro dominio. Sia
c un punto interno ad [a,b]. Allora:
b
a
c
b
a
c
f ( x )dx f ( x)dx f ( x )dx (additività secondo intervalli) Geometricamente, l’area di
un trapezoide può essere “spezzata” nell’area di più trapezoidi.
b
b
b
a
a
a
f ( x) g ( x)dx f ( x)dx g ( x)dx
b
b
a
a
k f ( x)dx k f ( x)dx
(additività)
(omogeneità)
a
f ( x)dx 0 (o, se vogliamo, l’area di un segmento è nulla…)
a
b
a
a
b
f ( x)dx f ( x)dx (orientazione dell’intervallo)
[a,b] prende il nome di intervallo di integrazione.
Grazie all’ultima proprietà dell’integrale di Riemann abbiamo risolto il problema del x negativo,
attribuendo un senso alle aree anche dal punto di vista dell’orientazione dell’intervallo.
94
Ma nonostante queste proprietà ancora non abbiamo colto il nesso tra integrali e primitive.
In realtà, il nesso logico c’è e si chiama:
Teorema fondamentale del calcolo integrale
Il teorema che unisce il concetto di aree al concetto di antiderivata afferma, in sostanza, che l’area
sottesa dal grafico di una funzione, dall’asse x e dalle rette relative agli estremi dell’intervallo di
integrazione si calcola antiderivando la funzione integranda. Un nesso abbastanza inverosimile
apparentemente. Come può l’area di un trapezoide essere calcolabile mediante una primitiva? In
realtà ci sono alcuni esempi che ci farebbero pensare il contrario:
Es. Area del rettangolo
Consideriamo la funzione costante f ( x ) 3 . Essa è
R – integrabile (com’è facile constatare, dato che il
sup e l’inf della funzione è sempre 3 in ogni
sottointervallo…) e ci proponiamo di calcolare l’area
del suo trapezoide relativo ad un intervallo del tipo
[0, t ] , con t variabile tra [0, b] .
Ci accorgiamo che l’area in questione è quella di un
t
banale rettangolo: 3dx 3t . Ma non è forse 3t una
0
primitiva valutata in t di 3…?
Es. Area del triangolo
L’area del trapezoide in questione relativa
all’intervallo [0, t ] è l’area del triangolo in figura.
x
Quindi, se g ( x) , abbiamo:
2
t
2
x
1 t t
0 2 dx 2 t 2 4 , cioè una primitiva di g
valutata in t.
Ancora non vi siete convinti? Provate a calcolare l’area del cerchio usando l’ultimo esempio sul
capitolo delle primitive per determinare l’area del cerchio.
In effetti, vale il seguente teorema:
Teorema fondamentale del calcolo integrale (o teorema di Torricelli):
Sia f : [a, b] , sia f limitata e con un numero finito di discontinuità di prima o terza specie (f è
allora R – integrabile…). Sia inoltre f derivabile. Allora:
La funzione integrale relativa ad f è continua;
L’area del trapezoide relativo a f in [a, b] è una primitiva F della funzione f ;
b
f ( x)dx F (b) F (a) .
a
95
Dimostrazione: (Non dimostriamo la continuità)
Se escludiamo i casi patologici, non lediamo la generalità al discorso se al posto di considerare una
funzione qualunque considerassimo una funzione crescente e continua nell’intervallo [a, b] (se la
funzione non avesse queste proprietà, basterebbe ripartire [a, b] in modo tale da suddividerlo in
intervalli più piccoli in ognuno dei quali la funzione risulterà sempre continua, crescente o
descrescente…). Sia allora f una funzione sempre crescente nell’intervallo [a, b] :
Sia a un estremo fissato e, a piacere, scegliamo
un estremo t variabile.
Ipotizziamo di sapere che esiste una funzione
A(t) che definiamo attraverso l’integrale di
Riemann come:
t
A(t ) f ( x)dx
a
(questa funzione è detta funzione integrale).
A(t ) è una funzione che quindi restituisce il
valore dell’area del trapezoide relativo a f in
[a, t ] . Al variare di t, ovvero, la funzione in
questione ci darebbe il valore esatto dell’area
sottesa dal grafico di f e relativa
all’intervallo [a, t ] .
Dato che t può variare, spostiamolo di un certo h . Consideriamo, cioè, il punto t h :
Studiamo quindi la variazione della funzione
A in seguito allo spostamento di t. Per come è
definita A, ciò è equivalente a domandarsi
quanta area è stata aggiunta in seguito allo
slittamento di t fino alla posizione t h (cioè
cosa vale l’area grigia T della figura).
Chiaramente non siamo in grado di dare un
valore numerico a tale area, anche se usando
la funzione A siamo in grado di esprimere la
sua variazione come:
A(t h) A(t )
Ove, ovviamente, A(t h) è l’area del
trapezoide del grafico di f in [a, t h] .
A questo punto, possiamo studiare la funzione A andando a studiarne la variazione al variare di t.
In particolare, possiamo approssimare, usando il metodo di Riemann, con l’area del rettangolo
inscritto in T. Poiché f è crescente, f (t ) f (t h) e l’area del rettangolo inscritto sarà data da:
Arett .inscritto Base Altezza h f (t )
Quest’area è sicuramente minore dell’area di T, mentre analogamente possiamo ragionare sul
rettangolo circoscritto e giungere alla conclusione che l’area
Arett .cir cos critto Base Altezza h f (t h)
è più grande dell’area di T.
Allora, mettendo insieme le due cose:
Arett .inscritto AT Arett .cir cos critto
96
Ovvero:
f (t )h A(t h) A(t ) f (t h)h
Dividendo tutto per h otteniamo:
f (t )
A(t h) A(t )
f (t h)
h
A(t h) A(t )
è il rapporto incrementale della funzione A relativo al punto t.
h
Poiché f è continua per ipotesi, possiamo passare al limite per t 0 da tutte le parti:
A(t h) A(t )
lim f (t ) lim
lim f (t h)
t 0
t 0
t 0
h
La quantità in mezzo, questa volta, è il limite per t 0 del rapporto incrementale nella sua prima
forma: se quel numero esiste finito, allora si può parlare di derivata prima di A in t.
Ma quel numero esiste finito. Infatti:
A(t h) A(t )
f (t ) lim f (t ) lim
lim f (t h) f (t )
t 0
t 0
t 0
h
Cioè:
A(t h) A(t )
f (t ) lim
f (t )
t 0
h
Per il teorema del confronto, deve essere:
A(t h) A(t )
lim
f (t )
t 0
h
Ed essendo f limitata, f (t ) esiste finito, e quindi, il limite del rapporto incrementale di A in t è la
derivata A’ di A in t:
A(t h) A(t )
lim
f (t ) A' (t ) f (t )
t 0
h
Quindi, per la generalità con cui è stato scelto t all’interno di [a, b] , f risulta derivabile in tutti i
punti t di [a, b] . In particolare, se la derivata di A in t è uguale a f (t ) allora A deve essere una
primitiva di f:
A' (t ) f (t ) A(t ) F (t ) C
Questa è la dimostrazione del primo punto del teorema.
Per dimostrare il secondo punto, basta porre t a e t b :
Se t a , allora abbiamo che, per quanto appena detto:
A(a ) F (a ) C
Il termine
a
Ma A(a ) è banalmente l’area “da a fino ad a”, cioè A(a ) f ( x)dx 0 . Quindi:
a
A(a ) F ( a) C 0 C F (a ) .
Quindi:
t
A(t ) f ( x )dx F (t ) C F (t ) F (a)
a
b
Se vogliamo
f ( x)dx
ci basta porre t b :
a
b
A(b) f ( x)dx F (b) F (a )
a
Quest’ultima relazione è nota come formula fondamentale del calcolo integrale.
97
Cvd
b
La scrittura f ( x )dx F (b) F ( a) viene talvolta abbreviata – ma è puro formalismo – in questo
a
modo:
b
f ( x)dx F ( x)
b
a
a
b
f ( x)dx F ( x)
b
a
a
dove F(x) è una primitiva della funzione f . Letteralmente, queste scritture significano “calcolo F(x)
e la valuto in b, in a, e poi ne faccio la differenza.
Per esempio, calcoliamo l’area sottesa dal grafico di f ( x ) 1 x 2 , cioè l’area della
semicirconferenza:
.
2
L’area in questione, per il teorema precedente, è data dall’integrale:
Chiaramente ci aspettiamo che il risultato sia: A
1
1
f ( x)dx
1
1 x 2 dx
1
Per calcolare questo integrale definito, allora, occorre calcolare prima una primitiva di f (la
costante, per il momento, non è più importante). La primitiva di f è stata calcolata come ultimo
esempio del capitolo precedente ed è:
1
ar cos( x)
F ( x) 1 x 2 dx x 1 x 2
C
2
2
Ora dobbiamo calcolare la differenza F (b) F (a ) F (1) F (1) :
1
ar cos( x)
ar cos(1) 1
ar cos(1)
1
1
F (1) F ( 1) x 1 x 2
1 1 12
(1) 1 (1) 2
2
2
2
2
1 2
2
0 0 0
2 2
98
Teorema della media integrale
Il teorema che enunceremo ora riguarda l’esistenza di un valore relativo alla funzione integranda
rispetto al quale la sua ordinata è proprio il valore dell’integrale definito da calcolare.
Implicitamente, questo teorema l’abbiamo citato nella dimostrazione del Teorema Fondamentale del
Calcolo.
Teorema della media integrale: Sia f : [a, b] , sia f limitata e R – integrabile.
Allora, esiste un valore [m, M ] , massimo e minimo di f in [a, b] tale che:
b
f ( x)dx (b. a)
a
Dimostrazione: Geometricamente il significato di questo teorema è evidente: esiste un altezza
compresa tra il minimo e il massimo della funzione in [a, b] tale che il rettangolo di base [a, b] e
b
altezza abbia area uguale all’area espressa dall’integrale
f ( x)dx .
a
b
Possiamo approssimare
f ( x)dx
con il rettangolo inscritto e circoscritto:
a
b
b
(b a )m f ( x)dx (b a ) M m
a
f ( x)dx
a
ba
M
b
Quindi esiste un [m, M ] tale che
f ( x)dx .
a
ba
Cvd
è detto valore medio di f in [a, b] .
Se aggiungiamo un’ipotesi in più al teorema precedente, otteniamo un ottimo risultato:
Corollario del teorema della media integrale:
Sia f : [a, b] , sia f limitata e R – integrabile. Sia f continua in [a, b] .
Allora, esiste un valore x0 [a, b] , tale che:
b
f ( x)dx (b. a) f ( x
0
)
a
b
Dimostrazione: Per il teorema precedente, esiste un [m, M ] tale che
f ( x)dx .
a
ba
Poiché f è continua, vale il teorema del valore intermedio. Quindi, tutti i valori compresi tra m e M
vengono assunti da f almeno una volta in [a, b] . In particolare, lo stesso vale per e quindi esiste
un x0 [a, b] tale che f ( x 0 ) , da cui la tesi.
Cvd
99
Integrali impropri (o generalizzati)
Generalizziamo ora il concetto di integrale di Riemann estendendolo ad intervalli infiniti o a regioni
del piano in cui la funzione integranda non è definita.
Def.: Sia f : [a,)
continua. L’integrale
f ( x)dx
a
È detto integrale improprio di 1° specie e assume significato di limite, nel senso che:
f ( x)dx :
a
K
lim
K
f ( x)dx
a
Se il limite esiste ed è finito, allora l’integrale si dice convergente. Viceversa, divergente.
Esempio: Consideriamo l’integrale
1
x
2
dx :
1
K
K
x 2 1
1
1
1
2
dx
lim
dx
lim
x
dx
lim
lim
lim (1) 1
2
1 x 2
K
K
K 2 1
1 K K K
1 x
1
Questo integrale, quindi converge.
K
Def.: Sia f : ( ,b]
continua. L’integrale
b
f ( x)dx
E’ detto integrale improprio di 2° specie e assume significato di limite, nel senso che:
b
b
f ( x)dx : lim
K
f ( x)dx
K
Se il limite esiste ed è finito, allora l’integrale si dice convergente. Viceversa, divergente.
Infine:
Def.: Sia f : [a, b] \ x 0
continua. L’integrale
b
f ( x)dx
a
E’ detto integrale improprio di 3° specie e assume significato di limite, nel senso che:
b
a
f ( x) dx : lim
0
x0
a
b
f ( x)dx lim
0
f ( x)dx
x0
Se il limite esiste ed è finito, allora l’integrale si dice convergente. Viceversa, divergente.
In ques’ultimo caso, la funzione va’ all’infinito o non esiste nel punto di ascissa x0 .
Questo tipo di integrali danno senso all’esistenza di regioni di piano infinite, ma con area finita.
L’area, in particolare, sarà finita quando la funzione tende, per esempio, a 0 molto rapidamente per
x , eccetera.
100
Integrali per il calcolo di volumi di solidi di rotazione
Consideriamo un trapezoide T. Immaginiamo di ruotare questo trapezoide intorno all’asse x. Esso
descriverà ruotando un solido di rotazione il cui volume è calcolabile mediante un integrale:
Formula del calcolo del volume di un solido di rotazione (asse x):
Sia f : I continua. Il volume del solido di rotazione ottenuto ruotando il trapezoide relativo a
f in un sottoinsieme [a, b] del suo dominio con una rotazione completa attorno all’esse x è dato
dall’integrale definito:
b
V x f 2 ( x )dx
a
Dimostrazione: Consideriamo il solito trapezoide T e un punto x qualunque all’interno di [a, b] :
Consideriamo il segmento tratteggiato della
figura e immaginiamo di farlo ruotare con
una rotazione di 360° attorno all’asse x.
Ruotando, esso descrive una circonferenza
di area f 2 ( x) .
Ora, se diamo uno spessore infinitesimo a
quest’area, otteniamo il volume di un
cilindro di altezza infinitesima dx: f 2 ( x )dx
. Al variare di x in [a,b], ottengo infiniti
cilindri di spessore infinitesimo che
ricoprono l’intero volume del solido. Cioè:
b
b
a
a
V x f 2 ( x )dx f 2 ( x )dx
Cvd
Se, invece, ruotassimo il trapezoide attorno all’asse y:
Formula del calcolo del volume di un solido di rotazione (asse y):
Sia f : I continua. Il volume del solido di rotazione ottenuto ruotando il trapezoide relativo a
f in un sottoinsieme [a, b] del suo dominio con una rotazione completa attorno all’esse y è dato
dall’integrale definito:
b
V y 2 xf ( x)dx
a
Dimostrazione: Analoga alla precedente. Questa volta, ruotando il segmento delimitato dall’altezza
del punto della curva relativo al valore x0 generiamo l’area laterale di un cilindro di raggio di base
x: 2xf ( x ) . Diamole uno spessore infinitesimo: otterremo il volume di un cilindro cavo di spessore
101
infinitesimo 2xf ( x)dx . Facciamo lo stesso per ogni x in [a, b] e sommiamo tutti i volumi
b
b
a
a
infinitesimi (integriamo): V y 2xf ( x )dx 2 xf ( x )dx .
Cvd
Cenni sugli integrali curvilinei e sugli integrali di superficie
Così come per il calcolo dei volumi di solidi di rotazione, gli integrali sono un valido strumento per
il calcolo della lunghezza di un arco di curva. Infatti, sia data una funzione f definita su [a,b] a
valori reali, se questa funzione è limitata e derivabile è anche rettificabile, cioè è possibile misurare
la sua lunghezza, e vale la formula seguente:
b
L 1 f ' ( x) dx
2
a
Ove f’ è la derivata di f in [a,b].
Se poi si fa ruotare una curva attorno all’asse x, le si fa descrivere l’area laterale di un solido di
rotazione che è possibile calcolare attraverso l’integrale:
b
S 2 f ( x) 1 f ' ( x) dx
2
a
Tuttavia, questi integrali sono spesso difficili da risolvere e sono molto laboriosi.
Conclusioni
Il calcolo integrale può essere quindi volto al calcolo di una somma di infinite quantità infinitesime
che possono dare un risultato finito – quindi convergere – o dare un risultato finito – quindi
divergere. Il calcolo integrale e le serie numeriche sono argomenti collegati. D'altronde esiste un
criterio, noto come criterio integrale per le serie numeriche:
Criterio integrale di convergenza per le serie numeriche: Sia
f :[0,1]→
+∞
negativa e monotona non crescente. La serie
∑ f ( n)
n=1
carattere.
102
e l'integrale
+∞
una funzione non
∫ f (x ) dx
1
hanno lo stesso