Lezione mecc n.17
pag
Argomenti di questa lezione:
• Dinamica rotazionale di una particella singola
• Dinamica rotazionale rispetto a poli mobili (dettaglio
utile per fare alcuni esercizi, p.es. sul rotolamento)
• Dinamica rotazionale per sistemi di particelle
• Seconda equazione cardinale
• Specializzazione al caso di corpi rigidi
• Corpi rigidi vincolati a ruotare intorno ad un asse
fissato
1
Lezione mecc n.17
pag
Dinamica del corpo rigido.
Abbiamo definito il momento d’inerzia I di un CR poiché
era una quantità che compariva nell’espressione
dell’energia cinetica.
Poi, abbiamo notato un’analogia fra le espressioni
(1/2) Mv2
(1/2) Iω2
(energia di una particella di massa M a velocità v)
(energia di un C.R. di mom.d’in. I e vel. ang. ω)
Troveremo ulteriori analogie andando a studiare la
dinamica rotazionale dei sistemi e specializzandola al CR.
Lista delle cose da fare
Breve richiamo al prodotto vettoriale
Dinamica rotazionale di un punto materiale
di sistemi di punti materiali (estensione)
di corpi rigidi (particolarizzazione)
Definizione di una nuova quantità: momento angolare
Elementi di statica del CR
2a equazione cardinale e conservazione del mom. angolare
Un’altra particolarità delle forze centrali, ⇒ cenni al moto
sotto forze centrali e, in particolare, sotto la forza
gravitazionale di un singolo centro attrattore (es. Terra
intorno al Sole)
2
Lezione mecc n.17
pag
3
Prodotto vettoriale (richiamo)
Dati due vettori A e B si definisce prodotto vettoriale fra A
∧B, che ha le seguenti caratteristiche:
e B la quantità A∧
1) è un vettore
2) è perpendicolare sia ad A che a B
3) ha modulo ABsenθ, dove A e B sono i moduli di A e
B e θ è un angolo misurato sul piano contenente A e B
a partire da A e andando verso B per la via più breve
Da questa definizione segue che, per i versori degli assi di
un sistema cartesiano ortonormale sinistrorso, valgono le
seguenti relazioni
xˆ ∧ xˆ = 0
yˆ ∧ xˆ = − zˆ
zˆ ∧ xˆ = yˆ
xˆ ∧ yˆ = zˆ
yˆ ∧ yˆ = 0
zˆ ∧ yˆ = − xˆ
xˆ ∧ zˆ = − yˆ
yˆ ∧ zˆ = xˆ
zˆ ∧ zˆ = 0
Abbiamo anche mostrato che, grazie a queste uguaglianze, si ha
che il prodotto vettoriale fra due vettori assegnati per componenti
può essere calcolato simbolicamente come un determinante:
xˆ
r r
A ∧ B = det Ax
B
x
yˆ
Ay
By
zˆ
Az
Bz
Lezione mecc n.17
pag
4
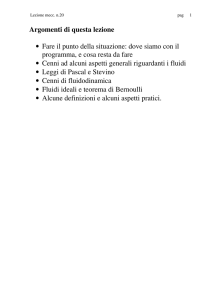
Dinamica rotazionale di una particella
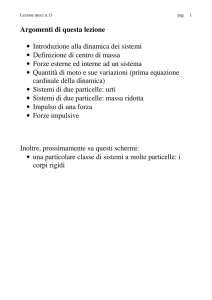
Supponiamo che una particella di massa M e velocità v
(quindi p=mv) si muova su una traiettoria rettilinea distante
sul piano, una quantità b da un punto di riferimento O.
M
v
b
r
O
∧p dove r è la
Consideriamo la quantità vettoriale L=r∧
posizione di M rispetto a O. (Notiamo che L=bp)
Definizione:
Chiamiamo L momento angolare della particella.
Ci chiediamo se L cambia e cosa serve per modificare L.
dL/dt=d(r∧
∧p)/dt=dr/dt∧
∧p+r∧
∧dp/dt
notiamo due fatti:
1) poiché p e v sono paralleli (e v=dr/dt) il primo
prodotto vettoriale è nullo
2) dalla prima eq. cardinale, il secondo prodotto eguaglia
r∧
∧F, dove F è la forza applicata alla massa M.
Se definiamo
τ= r∧
∧F
allora
Relazione che somiglia molto a dP/dt=F
dL/dt=ττ
Lezione mecc n.17
pag
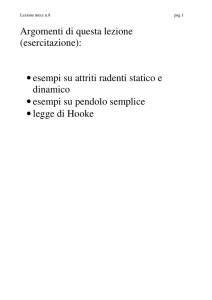
A volte è necessario studiare la dinamica rispetto a un polo mobile.
Come cambia la situazione?
Supponiamo di misurare la posizione (r) rispetto a
un’origine O (fissa), e i momenti rispetto a un punto
diverso P, che ha posizione s rispetto a O
(ed eventualmente s=s(t)).
v=dr/dt
b=r−s
r
O
s
Per misurare posizioni
e velocità
P
Per misurare momenti
(questo punto
potrebbe muoversi)
Ora consideriamo L=bΛp dove b è la posizione di M
rispetto a P: momento angolare rispetto a P, che è un
punto generico, che potrebbe anche muoversi.
5
Lezione mecc n.17
pag
Ci chiediamo se L cambia e, soprattutto, cosa
serve per modificare L.
dL/dt=d(bΛp)/dt=db/dtΛp+bΛdp/dt
ora db/dt=d(r−s)/dt= dr/dt−ds/dt
la prima di queste due derivate ha pr.vett. nullo
con p, ma la seconda no:
dL/dt=−ds/dtΛp+bΛdp/dt = −ds/dtΛp+bΛF =
−VPΛp+bΛF
il risultato semplice resta valido solo se P si
muove parallelamente al centro di massa.
6
Lezione mecc n.17
pag
7
Per ora, limitiamoci per semplicità ai casi in cui
vale dL/dt=bΛF
Estendiamo questa relazione al caso in cui il moto
in esame non riguardi una singola particella ma
un intero sistema di particelle
(sistema generico: non necessariamente, per
adesso, un corpo rigido).
Lezione mecc n.17
pag
8
Dinamica rotazionale di un sistema di particelle.
Sommiamo i momenti angolari di tutte le particelle, avendo
cura di calcolarli TUTTI rispetto ad un unico punto di
riferimento (polo) O.
Ltot=ΣiLi=ΣiriΛpi
Di nuovo, derivando rispetto al tempo, otteniamo
dLtot/dt=ΣidLi/dt=Σid(riΛpi)/dt=Σi τi=ΣiΣj τj−>
−>i
−>
Se le forze interne fra ogni coppia di particelle agiscono
lungo la retta congiungente le due particelle della coppia
(cosa che normalmente avviene), nelle somme dei momenti
torcenti si annullano tutti i momenti dovute a forze interne
Fji
Fij
i
ri
r⊥
j
rj
|riΛFij|=|rjΛFji|= Fr⊥
In conclusione,
dLtot/dt=ΣidLi/dt=Σid(riΛpi)/dt=Σiτi-esterni
Lezione mecc n.17
pag
Seconda equazione cardinale della dinamica:
Στ
dLtot/dt =
i i- esterni
(NB: Ltot e tutti i τi vanno calcolati rispetto a un unico polo).
Inoltre tale polo o è fermo o deve almeno muoversi parallelamente al cdm,
altrimenti nasce un termine aggiuntivo −VPΛPtot, con VP=velocità del polo.
da qui si ricava anche un principio di conservazione:
Se Σiτi-esterni=0, allora L si conserva
Confrontiamo gli aspetti della prima e della seconda equazione
cardinale e dei principi di conservazione che da esse scaturiscono
Se ΣiFi-esterne=0, allora P si conserva
Notare che si tratta equazioni vettoriali:
forniscono 3+3 informazioni,
sulla variazione di 3 componenti della quantità di moto totale e su
quella delle 3 componenti del momento angolare totale del sistema.
9
Lezione mecc n.17
pag 10
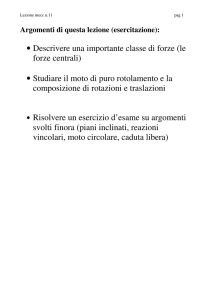
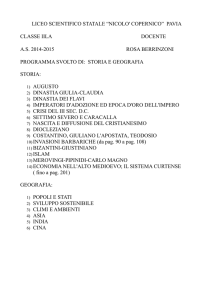
Corpo rigido vincolato a ruotare intorno ad un
asse fissato
R
v
r
r
τz=rxFy−ryFx
rx e ry sono proiezioni della posizione R di un punto
generico sul piano perpendicolare all’asse di rotazione (z).
anche le velocità (e le p) sono su tale piano.
Lzi=rximivyi−ryimivxi
Le velocità vi sono tangenziali e perciò perpendicolari alle
posizioni ri=(rxi, ryi) proiettate sul piano xy (che sono
proprio distanze dall’asse).
Lezione mecc n.17
pag 11
Si tratta di moti circolari:
Lzi=rimivi=rimi(ωri)=miri2ω,
poiché r┴v sul piano xy
Lz-tot=ΣiLzi=Σimiri2ω=Izω
Il fatto che il corpo sia rigido garantisce che sia I=costante:
dLz-tot/dt=d(Izω)/dt=Izdω/dt=Izα
questa relazione per certi versi ricorda F=ma.
τz=dLz-tot/dt=d(Izω)/dt=Izdω/dt=Izα
è la forma a cui si riduce la 2a eq. cardinale quando ci si
restringe a CR vincolati a ruotare intorno ad un asse fissato.