Matteo Gallone
Appunti di Analisi Matematica II
Questo testo è distribuito con la licenza Creative Commons: Attribuzione - Non commerciale - Condividi allo stesso modo 3.0, ovvero tu sei libero di di riprodurre, distribuire, comunicare al pubblico,
esporre in pubblico, rappresentare, eseguire e recitare quest’opera di modificare quest’opera alle seguenti
condizioni: a) Attribuzione — Devi attribuire la paternità dell’opera nei modi indicati dall’autore o da
chi ti ha dato l’opera in licenza e in modo tale da non suggerire che essi avallino te o il modo in cui tu
usi l’opera. b) Non commerciale — Non puoi usare quest’opera per fini commerciali. c) Condividi allo
stesso modo — Se alteri o trasformi quest’opera, o se la usi per crearne un’altra, puoi distribuire l’opera
risultante solo con una licenza identica o equivalente a questa.
Per il resto questa risulta essere una raccolta di appunti del corso di Analisi Matematica II tenuto
dal prof. Roberto Monti nell’AA 2010/2011 per il corso di laurea in Fisica nell’università di Padova.
Tuttavia, per approfondire meglio alcune parti ho deciso di aggiungere (poco) leggendo dalle dispense
del corso di Analisi Matematica II tenuto dal Dott. Corrado Marastoni nell’AA 2008/2009. Ulteriori
informazioni sono state tratte dal libro di testo “P. MARCELLINI - C. SBORDONE, Elementi di Analisi
Matematica II ”.
È inoltre impossibile scrivere qualcosa di così impegnativo senza commettere errori o dimenticanze.
Ringrazio pertanto tutti quelli che mi hanno suggerito correzioni o aggiunte nel testo.
Questa versione degli appunti è stata compilata il 23 luglio 2012.
Indice
1 Integrali generalizzati
1.1 Integrali impropri su intervallo illimitato .
1.2 Convergenza assoluta . . . . . . . . . . . .
1.3 Integrali oscillatori . . . . . . . . . . . . .
1.4 Integrali impropri di funzioni non limitate
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
6
7
8
2 Equazioni differenziali: primi elementi
2.1 Nozioni generali . . . . . . . . . . . . .
2.2 Equazioni lineari del primo ordine . .
2.3 Equazioni a variabili separabili . . . .
2.4 Equazioni lineari del secondo ordine .
2.5 Metodo della variazione delle costanti
2.6 Equazioni a coefficenti costanti . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
11
13
15
17
17
3 Curve in Rn
3.1 Definizioni di base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Lunghezza di una curva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Ascissa curvilinea e integrale curvilineo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
21
24
27
4 Spazi metrici e normati
4.1 Definizioni ed esempi . . . . . . . . .
4.2 Successioni in uno spazio metrico . .
4.3 Funzioni continue tra spazi metrici .
4.4 Spazi metrici completi . . . . . . . .
4.5 Convergenza puntuale e uniforme . .
4.6 Teorema delle contrazioni di Banach
4.7 Topologia di uno spazio metrico . . .
4.8 Spazi metrici compatti . . . . . . . .
4.9 Insiemi connessi . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
29
30
31
32
33
34
35
36
37
5 Calcolo differenziale in Rn
5.1 Limiti . . . . . . . . . . . . . . . . . . .
5.2 Derivate parziali e differenziabilità . . .
5.3 Funzioni composte . . . . . . . . . . . .
5.4 Teoremi del valor medio . . . . . . . . .
5.5 Derivate successive e Formula di Taylor
5.6 Estremi relativi . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
40
44
45
46
48
6 Ultimi teoremi
6.1 Teorema dell’invertibilità locale .
6.2 Teorema sulla funzione implicita
6.3 Estremi locali vincolati . . . . . .
6.4 Sottovarietà di Rn . . . . . . . .
6.5 Spazio normale e spazio tangente
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
51
51
52
53
54
55
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Matteo Gallone - Analisi Matematica II
CAPITOLO
1
Integrali generalizzati
1.1
Integrali impropri su intervallo illimitato
Definizione 1.1.1. Siano a ∈ R ed f : [a, ∞) → R una funzione tale che la restrizione
f : [a, M ] → R sia limitata e Riemann-integrabile per ogni a ≤ M < ∞. Diciamo che f
è integrabile in senso improprio su [a, ∞) se esiste finito il limite
Z
M
f (x) dx
I = lim
M →∞
(1.1)
a
In questo caso si il numero reale I si chiamerà integrale improprio di f su [a, ∞). Si
dirà inoltre che l’integrale converge se il limite esiste ed è un numero reale; mentre si dirà
che l’integrale diverge se il limite non esiste oppure esiste ma è infinito.
L’integrale in senso improprio
eredita
R∞
R∞
R ∞ dall’integrale di Riemann le proprietà di linearità
( a (f (x)+g(x)) dx = a f (x) dx+ a g(x) dx), di monotonia
R ∞ (ovvero date
R ∞due funzioni
f, g tali che f (x) > g(x) in tutto [a, ∞) allora anche a f (x) dx > a g(x) dx), e
di decomposizione del dominio (ovvero, dato b ∈ R tale che a < b < ∞ si ha che
Rb
R∞
R∞
f
(x)
dx
+
f (x) dx).
f
(x)
dx
=
a
a
b
Esempio. Si studi la convergenza dell’integrale
Z
∞
1
1
dx
xα
al variare del parametro reale α > 0.
R
Per prima cosa si calcola l’integrale da 1 a M della funzione integranda: aM x1α dx. L’integrale è immediato per
h −α+1 ix=M
1−α
qualsiasi α ∈ R, e vale x−α+1
= M 1−α−1 se α 6= 1 mentre vale [log(x)]x=M
x=1 = log(M ) − log(1) per α = 1.
x=1
Secondariamente si calcola il limite di questa quantità per M → ∞. Nel primo caso avremo limM →∞
M 1−α −1
1−α
il cui
1
valore dipende dal parametro α. Se α > 1 allora il limite vale α−1
∈ R e quindi l’integrale converge; se α < 1 allora il limite
va all’infinito e l’integrale diverge. Per il caso α = 1 bisogna calcolare il limite limM → ∞ log M = ∞, e quindi l’integrale
diverge.
In definitiva possiamo scrivere che
∞
Z
1
1
dx =
xα
1
α−1
∞
α>1
α≤1
Teorema 1.1.2 (Criterio del confronto). Siano f, g : [a, ∞) → R (con a ∈ R) due
funzioni Riemann-integrabili su ogni intervallo [a, M ] ⊂ R con a ≤ M < ∞. Supponiamo
Matteo Gallone - Analisi Matematica II
Integrali generalizzati
1.2
Convergenza assoluta
6
che esista x̄ ≥ a tale che 0 ≤ f (x) ≤ g(x) definitivamente[1] . Allora
Z ∞
Z ∞
f (x) dx < ∞
g(x) dx < ∞ ⇒
a)
a
a
Z ∞
Z ∞
f (x) dx = ∞ ⇒
g(x) dx = ∞
b)
a
(1.2)
a
Dimostrazione. Senza perdere generalità si può porre x̄ = a. Infatti, per la proprietà di decomposizione del dominio,
l’integrabilità delle funzioni dipende dall’integrabilità nell’intervallo [x̄, ∞).[2] Per la monotonia dell’integrale di Riemann
R
R
si ha, per ogni M ≥ a aM f (x) dx ≤ aM g(x) dx. Da cui, passando al limite[3] per M → ∞ si ottengono le affermazioni
a) e b). Infatti se F (M ) ≤ G(M ) allora anche limM →∞ F (M ) ≤ limM →∞ G(M ). Quindi se limM →∞ F (M ) = ∞ allora
anche limM →∞ G(M ) = ∞ mentre se limM →∞ G(M ) = ` ∈ R allora limM →∞ F (M ) = `0 ≤ ` con `0 ∈ R. Ma il che è
esattamente come dire che se l’integrale di f diverge allora diverge anche quello di g, mentre se l’integrale di g converge
allora converge anche quello di f .
Teorema 1.1.3 (Criterio del confronto asintotico). Siano f, g : [a, ∞) → R (con a ∈
R) due funzioni Riemann-integrabili su ogni intervallo [a, M ] ⊂ R con a ≤ M < ∞.
Supponiamo che risulti g(x) > 0 per ogni x ≥ a e che esista finito e diverso da zero il
limite
f (x)
L = lim
6= 0
x→∞ g(x)
allora
Z
∞
Z
f (x) dx converge ⇔
a
∞
g(x) dx converge
a
Dimostrazione. Si ha per ipotesi che L ∈ R\{0}, quindi possiamo supporre anche che L > 0. Allora per il teorema della
f (x)
permanenza del segno[4] esiste x̄ ≥ a tale che per ogni x ≥ x̄ e per la definizione di limite[5] si ha che: L
≤ g(x) ≤ 2L.
2
Siccome g(x) > 0 allora si può riordinare la disuguaglianza ottenendo L
g(x) ≤ f (x) ≤ 2Lg(x). La tesi segue per il Teorema
2
R∞ L
R
L ∞
1.1.2 (del confronto). Infatti, poichè L
g(x)
≤
f
(x)
≤
2Lg(x)
allora
se
a 2 g(x) dx = 2R a g(x) dx diverge diverge anche
2
R∞
R∞
R∞
∞
a f (x) dx, mentre se a 2Lg(x) dx = 2L a g(x) dx converge, allora converge anche a f (x) dx.
Esercizio 1.1. Si studi, al variare del parametro α ∈ R la convergenza dell’integrale
improprio
Z ∞ α+1
1
x
log 1 +
dx
x+1
x
1
α+1
α+1
Soluzione. Sviluppando il logaritmo in serie di Taylor a ∞ si ha che f (x) = xx+1 log 1 + x1 = xx+1 x1 + o∞ x1
=
α
α+1
α
α
α
x
x
1
x
1
x
x
1
1
+ x+1 o∞ x = x+1 1 + x o∞ x
= x+1 (1 + o∞ (1)) = x
1 (1 + o∞ (1)) = x1−α (1 + o(1)). La funzione di
x+1
1+ x
f (x)
1
. Risulta g(x) > 0 per x > 0 e inoltre limx→∞ g(x) = 1 6= 0. Siccome l’integrale
confronto sarà quindi g(x) = x1−α
R∞ 1
dx
converge
se
e
solo
se
α
< 0, allora anche l’integrale in esame converge se e solo se α < 0.
1 x1−α
1.2
Convergenza assoluta
Definizione 1.2.1. Siano a ∈ R ed f : [a, ∞) → R una funzione tale che la restrizione
f : [a, M ] → R sia limitata e Riemann-integrabile per ogni a ≤ M < ∞. Diciamo che f
è assolutamente integrabile su [a, ∞) se converge l’integrale improprio
Z ∞
|f (x)| dx
(1.3)
a
[1] Ricordiamo
che definitivamente vuol dire ∀x ≥ x̄.
[2]
ipotesi si Rha che f e g sono integrabili su [a, M ] per ogni RM > a, allora basta porre M = x̄ e si ha che
R ∞ Visto che Rper
x̄
∞
∞
f
(x)
dx
=
f
a
a (x) dx + x̄ f (x) dx la cui integrabilità dipende solo da x̄ f (x) dx. Analogo discorso vale anche per
la g.
[3] Bisogna discutere prima l’esistenza del limite. Tuttavia è semplice notando che la funzione ϕ : [a; ∞) → R definita
R
come ϕ(M ) = aM f (x) dx è monotona crescente. Quindi esiste sicuramente il limite limM →∞ ϕ(M ).
[4] Sia f : X → R una funzione continua definita su un intervallo aperto di reali che ha limite lim
x→x0 f (x) = ` > 0.
Allora esiste un intorno U di x0 tale che f (x) > 0 per ogni x ∈ U ∩ X diverso da x0 .
[5] Per la definizione di limite, se lim
x→∞ f (x) = ` ∈ R deve esistere ε > 0 tale per cui ` − ε < f (x) < ` + ε definitivamente.
Matteo Gallone - Analisi Matematica II
Integrali generalizzati
Integrali oscillatori
1.3
7
In questo caso diciamo che l’integrale improprio
R∞
a
|f (x)| dx converge assolutamente.
Teorema 1.2.2. Sia f : [a, ∞) → R una funzione limitata e Riemann-integrabile su ogni
intervallo della forma [a, M ] con M ≥ a. Se f è assolutamente integrabile su [a, ∞) allora
è integrabile in senso improprio su [a, ∞) e inoltre
Z ∞
Z ∞
≤
f
(x)
dx
|f (x)| dx
(1.4)
a
a
f−
Dimostrazione. Definiamo le funzioni
(parte positiva) e
(parte negativa), f + , f − : [a, ∞) → [0, ∞) come: f + (x) =
max{f (x), 0} e f − (x) = max{−f (x), 0}. Con questa definizione si ha che f (x) = f + (x)−f − (x) e |f (x)| = f + (x)+f − (x) per
ogni x ≥ a. È noto, inoltre, che le funzioni f +Re f − sono Riemann-integrabili
su ogni intervallo [a, M ]. Per il teorema Teorema
R
1.1.2 (del confronto) gli integrali impropri a∞ f + (x) dx e a∞ f − (x) dx convergono[6] . Passando al limite per M → ∞
RM
RM +
R
R
nell’identità a f (x) dx = a (f (x) − f − (x)) dx = aM f + (x) dx − aM f − (x) dx
la convergenza dell’integrale
si ottiene
R
R
R
improprio di f su [a, ∞). Passando al limite nella disuguaglianza aM f (x) dx = aM f + (x) dx + aM −f − (x) dx ≤
RM +
RM
R
M
−
a |f (x)| dx + a | − f (x)| dx = a |f (x)| dx si ottiene l’equazione (1.4).
f+
1.3
Integrali oscillatori
Data una funzione f : [a, ∞) → R con segno oscillante[7] attorno a ∞, come per le serie
a segno alterno la prima cosa da fare sarà controllare la assoluta convergenza dell’integrale. Infatti per il Teorema 1.2.2 se una funzione è assolutamente integrabile allora è
anche integrabile. Se la funzione non è assolutamente integrabile va ricordato il seguente
teorema, assimilabile al criterio di Leibnitz per le serie numeriche.
Teorema 1.3.1 (Abel - Dirichlet). Siano f ∈ C([a, ∞)) e g ∈ C 1 ([a, ∞)) con a ∈ R, due
funzioni con le seguenti proprietà:
i) f = F 0 con primitiva F ∈ C 1 ([a, ∞)) limitata;
ii) g 0 (x) ≤ 0 e limx→∞ g(x) = 0.
Allora converge l’integrale improprio
Z
∞
f (x)g(x) dx.
a
R
RM
0
Dimostrazione. Dato l’integrale aM f (x)g(x) dx, integrando per parti, [F (x)g(x)]x=M
x=a − a F (x)g (x) dx = F (M )g(M ) −
RM
F (a)g(a)− a F (x)g 0 (x) dx. Siccome F è limitata e g infinitesima per M → ∞ si ha che limM →∞ F (M )g(M ) = 0. Quindi il
primo dei tre addendi tenderà a 0. D’altra parte, siccome F (x) è limitata per ipotesi allora si ha |F (x)| ≤ supx∈[a,∞) |F (x)|,
R
R
quindi si arriva alla maggiorazione aM |F (x)g 0 (x)| dx ≤ supx∈[a,∞) |F (x)| aM |g 0 (x)| dx. Siccome g 0 (x) ≤ 0 si trova
RM 0
RM 0
che supx∈[a,∞) |F (x)| a |g (x)| dx = − supx∈[a,∞) |F (x)| a g (x) dx = supx∈[a,∞) |F (x)| (g(a) − g(M )). Poichè g è
R
infinitesima allora limM →∞ g(M ) = 0, quindi a∞ |F (x)g 0 (x)| dx ≤ g(a) supx∈[a,∞) |F (x)|. Ma F (x) è limitata, quindi
R∞
supx∈[a,∞) |F (x)| ∈ R e g(a) ∈ R e quindi a |F (x)g 0 (x)| dx converge. La tesi è dimostrata.
Esercizio 1.2. Per ogni α ≥ 0 discutere la convergenza semplice e assoluta del seguente
integrale improprio:
Z ∞
sin x log x
dx
xα
1
Soluzione.
Si studi innanzi
tutto la convergenza assoluta. Poichè | sin x| ≤ 1 sempre allora per il teorema del confronto
R ∞ sin x log x R ∞ log x dx
≤
dx. Per il dominio di integrazione scelto il modulo è privo di senso. Quindi lo studio della
1
1
xα
xα R
x
convergenza assoluta equivale allo studio della convergenza dell’integrale 1∞ log
dx.
xα
x
Osservo ora che per ogni ε > 0 il limite limx→∞ log
= 0, dunque per ogni ε > 0 esiste x̄ tale che ∀x ≤ x̄ si ha
xε
R ∞ log x
R ∞ ε−α
≤ 1, quindi 1 xα dx ≤ 1 x
dx. Quindi per α − ε > 1 l’integrale converge, quindi per α > 1 l’intgrale
converge assolutamente e quindi c’è anche convergenza semplice.
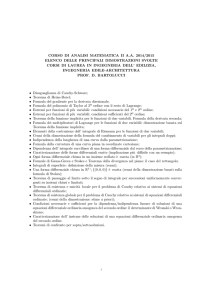
Studiamo ora la convergenza assoluta per 0 ≤ α ≤ 1. Confronto ora la funzione con una serie (vedi√ figura sot
to). Cosidero l’insieme Ik = kπ + π4 , kπ + 34 π con k ∈ Z in modo tale che ∀x ∈ Ik si ha | sin x| ≥ 22 , log x ≥
log x
xε
quanto |f (x)| converge per ipotesi e si ha che |f (x)| ≥ f + (x) e |f (x)| ≥ f − (x).
d’uopo definire cosa si intende per funzione oscillante; viene enunciata la seguente. Definizione. Una funzione
si dice oscillante attorno ad un punto x0 se non esiste alcun intorno di x0 in cui la funzione ha segno costante.
[6] In
[7] Sarà
Matteo Gallone - Analisi Matematica II
Integrali generalizzati
1.4
Integrali impropri di funzioni non limitate
8
R ∞ sin x log x
1
dx ≥
α . Quindi, usiamo il teorema del confronto come sopra:
1
xα
kπ+ 3
π
(√
4 )
π P∞
1
5
1
π
2
= 2 log 4 π 2
k=1 (kπ+ 3 π )α . Quest’ultima serie diverge per 0 ≤ α ≤ 1, quindi non
k=1 2
(kπ+ 34 π)α 2
4
c’è convergenza assoluta dell’integrale per 0 ≤ α ≤ 1.
log x + π4
P∞ √2
≥ log
log 54 π
5
π
4
e
1
xα
≥
Figura 1.1: L’idea che stà alla base del confronto con una serie
Verifichiamo se esiste convergenza semplice in quell’intervallo. È facile utilizzando il teorema sugli integrali oscillatori
x
(Abel-Dirichlet), in quanto la funzione oscillante è sin x e la funzione infinitesima è log
per α > 0. Quindi in questo
xα
intervallo l’integrale converge ma non assolutamente.
R
Resta da studiare il caso α = 0. In questo caso l’integrale da studiare è 1∞ sin x log x dx, ovvero resta da vedere se esiste
RM
R M cos x
ed ha un valore finito il limite limM →∞ 1 log x sin x dx = limM →∞ [− cos x log x]x=M
dx. Per Abel-Dirichlet
x=1 + 1
x
il secondo addendo è un integrale convergente, mentre il primo addendo non ha limite, quindi questo limite non esiste e
quindi non si ha convergenza semplice.
Ricapitolando: α = 0 non c’è convergenza; α > 0 c’è convergenza semplice e α > 1 c’è convergenza assoluta.
1.4
Integrali impropri di funzioni non limitate
Finora ci siamo occupati dell’integrabilità di funzioni solo a ∞. Tuttavia ci è noto dal
corso di analisi I che alcune funzioni, in particolari punti ai limiti del loro dominio, tendono
a ∞. Un esempio classico è la funzione y = x1 all’intorno del punto x = 0. Dovremo quindi
definire cosa si intende per integrabilità in senso improprio di queste funzioni.
Definizione 1.4.1. Sia f : (a, b] → R con −∞ < a < b < ∞ una funzione limitata e
Riemann-integrabile su ogni intervallo della forma [a + ε, b] con 0 < ε < b − a. Diciamo
che f è integrabile in senso improprio su (a, b] se esiste finito il limite
Z b
f (x) dx
(1.5)
I = lim+
ε→0
a+ε
In questo caso diciamo che l’integrale improprio di f su (a, b] converge e poniamo
f (x) dx = I.
a
Lo studio degli integrali impropri di funzione, così come sono stati appena definiti,
si può ricondurre allo studio fatto per le funzioni in ∞ tramite un cambio di variabile
b−a
t = x−a
che porta alla trasformazione formale di integrali:
Z b
Z ∞ b − a dt
f (x) dx = (b − a)
f a+
t
t2
a
1
Rb
Esempio. Al variare del parametro reale α > 0 studiamo ora la convergenza dell’integrale
Z 1
1
dx
α
0 x
Definiamo per semplicità c = 0 + ε. E calcoliamo la primitiva di x1α nell’intervallo [c, 1]. Per α 6= 1 si ha che
h −α+1 ix=1
R
−α+1
x
= 1 − c−α+1 . Per α = 1 si ha invece che cb x1α dx = [log x]x=1
x=c = 0 − log c.
−α+1
x=c
Matteo Gallone - Analisi Matematica II
Rb
1
c xα
dx =
1.4
Integrali generalizzati
Integrali impropri di funzioni non limitate
9
−α+1
Passando al limite per c → 0+ si ha che limc→0+ 1− c−α+1 dipende dal parametro α. In particolare, se α > 1 l’integrale
diverge, se α < 1 l’integrale converge. Per studiare il caso α = 1 bisogna calcolare il limite limc→0+ log c = −∞, quindi
l’integrale diverge.
Infine possiamo riassumere quanto detto finora:
Z 1
1
converge α < 1
dx
=
α
diverge
α≥1
0 x
Viene enunciato ora, senza dimostrazione, un teorema del confronto asintotico per gli
integrali di funzioni non limitate.
Teorema 1.4.2 (Confronto asintotico per funzioni non limitate). Siano f, g : (a, b] → R
con −∞ < a < b < ∞, due funzioni limitate e Riemann-integrabili su ogni intervallo
della forma [a + ε, b] con 0 < ε < b − a. Supponiamo che
i) limx→a+ g(x) = ∞;
(x)
ii) il limite limx→a+ fg(x)
esiste finito ed è diverso da zero.
Allora
Z
b
Z
f (x) dx converge ⇔
a
b
g(x) dx converge
a
Esercizio 1.3. Al variare di α ∈ R>0 studiare la convergenza semplice dell’integrale
Z 1
sin(xα )
dx
0 log(1 + x)
Soluzione. Notiamo che per x = 1 la funzione è ben definita, mentre crea problemi per x = 0. Sviluppiamo quindi in
serie di Taylor il logaritmo e il seno in un intorno di 0: log(1 + x) = x + o0 (x), sin(xα ) = xα + o0 (xα ). Si ha quindi che
R xα +o (xα )
R sin(xα )
sin(xα )
xα +o (xα )
∼0 x+o0 (x) . Ovvero se converge 01 x+o0 (x) dx allora converge anche 01 log(1+x) dx per il teorema appena
log(1+x)
0
0
enunciato.
R xα +o (xα )
Lavoriamo su 01 x+o0 (x) dx, raccogliamo i termini di grado massimo a numeratore e denominatore e otteniamo
R 1 xα 1+o(xα )
R 1 10
R 1 sin(xα )
0 x 1+o(x) dx ∼ 0 x1−α dx che converge se e solo se 1 − α < 1, ovvero se α > 0. Quindi l’integrale 0 log(1+x) dx
converge per α > 0.
Esercizio 1.4. Si studi, al variare del parametro α ∈ R la convergenza dell’integrale
improprio
Z ∞
tα−1 e−t dt
0
R
R
Soluzione. L’integrale va studiato sia in 0 sia in ∞. Quindi si spezza l’integrale in 01 tα−1 e−t dt e 1∞ tα−1 e−t dt.
L’integrale di partenza convergerà se e solo se convergeranno tutti e due gli integrali. Studiamoli separatamente.
R
1 α 1
t 0 (se
In un intorno di 0 la funzione integranda è asintotica a tα−1 e−t ∼∗0 tα−1 , il cui integrale 01 tα−1 dt = α
R1 1
α 6= 0) converge per α > 0. Il caso α = 0 è semplice in quanto 0 t dt = limε→0 [0 − log ε] = ∞ non converge. Quindi il
primo integrale converge per α > 0.
Studiamo il secondo integrale. Per semplicità dividiamo lo studio in 3 casi: α > 1, α = 1 e α < 1. Sapendo che
1
t
t
definitivamente si ha e 2 t > tα−1 , allora si ha anche tα−1 e−t < e 2 e−t = e− 2 il cui integrale da 1 a ∞ si calcola direttamente
q
iM
h
R∞ −t
t
−
2 dt = limM →∞ −2 −e 2
= −2 1e ∈ R converge, quindi per confronto anche l’integrale di partenza converge
1 e
1
R
M
per α > 1. Il caso α = 1 si calcola direttamente 1∞ e−t dt = limM →∞ −e−t 1 = 1e ∈ R, quindi l’integrale converge.
α−1
Il caso α < 1 si risolve
notando che t
è infinitesima, quindi sicuramente minore di 1. Ma allora l’integrale converge se
R
e solo se converge 1∞ e−t dt che (come abbiamo visto analizzando il caso α = 0) converge. Quindi il secondo integrale
converge per ogni α ∈ R.
In conclusione l’integrale proposto nell’esercizio converge se α > 0.
Matteo Gallone - Analisi Matematica II
10
Integrali generalizzati
1.4
Integrali impropri di funzioni non limitate
Matteo Gallone - Analisi Matematica II
CAPITOLO
2
Equazioni differenziali: primi elementi
2.1
Nozioni generali
Un’equazione differenziale ordinaria scalare è un problema in cui si chiede di determinare
una funzione y(x) : I → C, definita su un intervallo aperto I ⊂ R, a partire da una
relazione in cui possono comparire le sue derivate (può comparire anche la stessa funzione
y(x) vista come derivata di ordine 0) e la variabile x.
Da un certo punto di vista si tratta della generalizzazione del problema dell’integrazione, ove l’integrazione è vista come una semplice equazione differenziale nella forma
y 0 = f (x).
Un’equazione differenziale è detta ordinaria se la funzione incognita y(x) dipende dalla
sola variabile x (o quantomento che nell’equazione compaiono solo derivate rispetto a
x). Un’equazione differenziale è detta scalare se la funzione incognita y(x) ha valori
in C e non in Cn con n ≥ 2. L’insieme delle soluzioni di un’equazione differenziale
è detto integrale generale dell’equazione e solitamente esso ha Rinfiniti elementi (anche
l’integrazione semplice fornisce un insieme infinito di elementi: f (x) dx = F (x) + k).
L’ordine di un’equazione differenziale è il massimo ordine della derivata presente. In
particolare, un’equazione differenziale di ordine n si dirà in forma autonoma se in essa la
derivata di ordine massimo y (n) appare esplicitata rispetto a quelle di ordine inferiore; si
dirà lineare se essa appare come polinomio di primo grado nelle derivate y (0) , y (1) , . . . , y (n)
della funzione incognita y(x); si dirà invece autonoma se la variabile indipendente x non
appare direttamente nell’equazione.
Spesso alle equazioni differenziali sono associate alcune condizioni iniziali. Se x0 ∈ I e
le condizioni iniziali sono gli n valori che devono assumere le derivate di y(x) fino all’ordine
(n−1)
n − 1 nel punto x0 (ovvero sono del tipo y(x0 ) = y0 , y 0 (x0 ) = y00 , . . . , y (n−1) (x0 ) = y0
)
si parla di problema di Cauchy. Spesso, nei casi standard quasi sempre, il problema di
Cauchy ha un’unica soluzione.
2.2
Equazioni lineari del primo ordine
Sia I ⊂ R un intervallo aperto e siano a, b ∈ C(I) due funzioni continue. Un’equazione
differenziale nella forma
y 0 + a(x)y = b(x),
x∈I
(2.1)
si dice equazione lineare del primo ordine. Il problema di Cauchy relativo a questo tipo di
equazioni differenziali si ha fissando un punto x0 ∈ I e un numero y0 ∈ R ed imponendo
che y(x0 ) = y0 .
Matteo Gallone - Analisi Matematica II
Equazioni differenziali: primi elementi
2.2
Equazioni lineari del primo ordine
12
Dedurremo la formula risolutiva dell’equazione differenziale, e più in generale del problema di Cauchy, con un argomento euristico. Consideriamo preliminarmente il caso in
cui b(x) = 0, ovvero il caso dell’equazione omogenea:
y 0 + a(x)y = 0
(2.2)
Una soluzione banale di questa equazione è y = 0. Cerchiamo ora 0 le altre soluzioni. Imponiamo quindi y 6= 0, allora la (2.2) si può riscrivere nella forma yy = −a(x). Integrando
ambedue i membri rispetto ad x si ha che log |y| = −A(x) + d, ove d ∈ R è la costante di
integrazione e A(x) è una funzione tale che A0 (x) = a(x).
Esponenzializzando il tutto si ha che y = ±e−A(x)+d , e quindi, ponendo C = ±e−d
troviamo la soluzione generica dell’equazione omogenea:
y = Ce−A(x)
(2.3)
Questa funzione risolve l’equazione omogenea per ogni C ∈ R. La soluzione dell’equazione
non omogenea, ovvero quella per l’equazione (2.1), sarà nella forma (2.3) dove ora C non
sarà più un numero reale, ma una funzione C ∈ C 1 (I) che deve essere determinata. Questo
metodo si chiama metodo della variazione delle costanti.
Calcoliamo la derivata della soluzione, ovvero y 0 = C 0 e−A(x) − a(x)Ce−A(x) ed inseriamola nella (2.1). Otteniamo una nuova equazione differenziale nell’incognita C 0 , ovvero
C 0 e−A(x) = b(x) che riscritta meglio è C 0 = b(x)eRA(x) . Integrando tale equazione in un
x
intervallo (x0 , x) ⊂ I otteniamo C(x) = C(x0 ) + x0 b(t)eA(t) dt. Abbiamo quindi determinato la funzione incognita C. La sostituiamo nella (2.3) e troviamo l’integrale generale
per le equazioni lineari del primo ordine non omogenee:
Z x
A(t)
y(x) = c(x0 ) +
b(t)e
dt e−A(x) ,
x∈I
(2.4)
x0
dove c(x0 ) ∈ R è un numero reale. Per ogni scelta di tale numero la funzione (2.4) verifica
l’equazione differenziale (2.1).
Il numero c(x0 ) si può determinare imponendo che l’integrale generale y verifichi la
condizione iniziale y(x0 ) = y0 . Se calcoliamo la (2.4) in x0 vediamo che vale y(x0 ) =
c(x0 )e−A(x) . Da cui, imponendo la condizione iniziale si ottiene c(x0 ) = y0 eA(x) . La
formula di rappresentazione per la soluzione del problema di Cauchy sarà quindi:
Z x
A(x0 )
A(t)
y(x) = y0 e
+
b(t)e
dt e−A(x) ,
x∈I
(2.5)
x0
Il seguente teorema prova che questa soluzione è l’unica.
Teorema 2.2.1. Siano I ⊂ R un intervallo aperto, x0 ∈ I, a, b ∈ C(I) e y0 ∈ R. Allora
la funzione (2.5) risolve in modo unico il problema di Cauchy
0
y + a(x)y = b(x)
y(x0 ) = y0
1
Dimostrazione.
R Sia z ∈ C (I) una soluzione dell’equazione differenziale (2.1) e consideriamo la funzione ausiliaria w(x) =
eA(x) z(x) − xx b(t)eA(t) dt dove A(x) è, come di consueto, una primitiva di a(x). Dal momento che sull’intervallo I
0
risulta w0 = (az + z 0 )eA − beA = (z 0 + az − b)eA = 0 allora per il teorerma di Lagrange[1] la funzione w è costante
su tutto I. Ciò significa che esiste k ∈ R tale
che w(x) = k ∈ R per ogni x ∈ I. Ricaviamoci quindi l’espressione
R
esplicita di z(x) in funzione di w(x), z(x) = w(x) + xx b(t)eA(t) dt e−A(x) . Aggiungendo l’informazione che w(x) = k
0
R
otteniamo z(x) = k + xx b(t)eA(t) dt e−A(x) da cui si vede che perchè z(x) soddisfi alla condizione z(x0 ) = y0 serve che
0
k = y0 eA(x0 ) . Quindi l’espressione trovata per z corrisponde a (2.5) e risulta così dimostrata l’unicità della soluzione.
[1] Sia f : [a, b] → R una funzione continua in [a, b] e derivabile in (a, b), allora esiste c ∈ (a, b) tale che f 0 (c) =
Noi qui utilizziamo un corollario. Infatti se f 0 (x) = 0 allora f (a) = f (b) per ogni scelta di a, b ∈ I.
Matteo Gallone - Analisi Matematica II
f (b)−f (a)
.
b−a
2.3
Equazioni differenziali: primi elementi
Equazioni a variabili separabili
13
Esercizio 2.1. Si trovino le soluzioni generali dell’equazione differenziale
2
y 0 = 2xex y
Soluzione. Per prima cosa si dividano tutti e due i membri per y (che quindi dovrà necessariamente essere diversa da 0).[2]
R y0
R
0
2
2
Si otterrà: yy = 2xex . Si integrino ora ambedue i membri rispetto alla variabile x:
dx = 2xex dx. Si noti ora che
y
R
R
2
2
dy
y 0 dx = dy e si sostituisca
= 2xex dx. A questo punto si possono calcolare gli integrali, e risulta log |y| = ex + c.
y
esponenzializzando si ottiene y = ee
x2
+c
x2
= Cee
, che è proprio la soluzione generale dell’equazione differenziale cercata[3] .
Esercizio 2.2. Si trovino le soluzioni generali della seguente equazione differenziale omogenea:
y 0 = arctanx y
Soluzione. Si operi come prima, ovvero si dividano ambedue i membri per y, sempre ricordando che y = 0 è soluzione
0
banale dell’equazione differenziale yy = arctanx. Si integrino ora tutti e due i membri e si trovi il dy come fatto sopra:
R
R dy
= arctanx dx. Si risolvano ora i due integrali[4] e si otterrà: log |y| = x arctanx − 12 log(1 + x2 ) + k da cui,
y
esponenzializzando il tutto[5] si ottiene y =
2.3
x arctanx
Ce√
,
1+x2
che è la soluzione generale dell’equazione cercata.
Equazioni a variabili separabili
Siano I, J ⊂ R due intervalli aperti e siano f ∈ C 1 (I) e g ∈ C(J) due funzioni continue.
Si cercano le soluzioni dell’equazione differenziale del primo ordine
y 0 = f (x)g(y),
x∈I
(2.6)
per qualche intervallo I1 ⊂ I. Una equazione scritta nella forma (2.6) è detta equazione
differenziale a variabili separabili. Eventualmente, fissato un punto x0 ∈ I e un valore
y0 ∈ J si può prescrivere la condizione iniziale y(x0 ) = y0 e costruire così un problema di
Cauchy.
Osserviamo che se g(y0 ) = 0 allora la funzione costante y(x) = y0 con x ∈ I è certamente una soluzione dell’equazione differenziale che soddisfa alla condizione iniziale; in
altre parole è soluzione del problema di Cauchy.
Altre soluzioni si trovano imponendo g(y0 ) 6= 0. Quindi, poichè g è una funzione
continua, allora per il teorema della permanenza del segno esiste un intervallo aperto
J1 ⊂ J tale che y0 ∈ J1 in cui g 6= 0. Possiamo allora dividere ambedue i membri per g(y)
e separare le variabili. Riscriviamo quindi l’equazione differenziale nel seguente modo:
y 0 (x)
= f (x)
g(y(x))
(2.7)
dove x varia in un intorno I1 ⊂ I del punto x0 tale che y(x) ∈ J1 per ogni x ∈ I1 .
R x y0 (t)
Possiamo integrare ora ambedue i membri della (2.7) rispetto a x, ottenendo x0 g(y(t))
dt =
Rx
0
f (t) dt. Operando un cambio di variabile η(t) = y(t) e notando che η (t) dt = dη
x0
R y dη
Rx
allora l’integrale diventa y0 g(η(t))
= x0 f (t) dt.
1
Sia ora G ∈ C 1 (J1 ) una primitiva di g(y)
(nella variabile y) definita nell’intervallo J1
dove risulta g 6= 0. La funzione G è strettamente monotona perchè G0 (y) = g(y) 6= 0,
quindi G risulta invertibile.
[2] Si
noti che y(x) = 0 è una soluzione dell’equazione sovraindicata.
soluzione è determinata da un particolare valore del parametro C ∈ R. D’ora in poi C indicherà questo parametro,
da scegliere in R salvo precisazioni contrarie.
R
R x
R 2x
1
[4] L’integrale dell’arcotangente va risolto per parti:
arctanx dx = xarctanx − 1+x
dx =
2 dx = xarctanx − 2
1+x2
[3] Ogni
xarctanx − 12 log(1 + x2 ) + k.
[5] Si ricordi la proprietà dei logaritmi per cui α log(x) = log(xα ). In cui α ∈ R.
Matteo Gallone - Analisi Matematica II
14
Equazioni differenziali: primi elementi
2.3
Equazioni a variabili separabili
Sia poi F ∈ C 1 (I1 ) una primitiva di f . Integrando l’equazione differenziale (2.7) risulta
G(y(x)) = F (x) + C dove C ∈ R è una costante che può essere determinata tramite la
condizione iniziale, e precisamente[6] vale C = G(y0 ) − F (x0 ).
Detta G−1 : G(J1 ) → J1 la funzione inversa di G, l’integrale generale dell’equazione
differenziale assume la forma
y(x) = G−1 (F (x) + C)
(2.8)
E la soluzione del problema di Cauchy è
y(x) = G−1 (F (x) + G(y0 ) − F (x0 ))
(2.9)
Si vuole far notare che questa soluzione è buona nell’intorno I1 ⊂ I di x0 che è, in generale,
più piccolo di I.
Quanto trattato finora rileva due tipi di soluzioni per le equazioni differenziali nella
forma (2.6): le soluzioni costanti e le soluzioni per cui g(y0 ) 6= 0. Potrebbero, tuttavia,
esserci delle altre soluzioni. Se g 6= 0 su J, l’argomentazione portata fino a qui prova
che la soluzione è necessariamente nella forma (2.8). Per quanto riguarda il problema di
Cauchy associato:
Teorema 2.3.1. Siano I, J ⊂ R due intervalli aperti tali che x0 ∈ I e y0 ∈ J, e siano
f ∈ C(I), g ∈ C(J) tali che g 6= 0 su J. Allora il problema di Cauchy
0
y = f (x)g(y)
y(x0 ) = y0
ha una soluzione unica y ∈ C 1 (I1 ) data dalla formula (2.9), per qualche intervallo I1 ⊂ I
contenente x0 .
Esercizio 2.3. Calcolare in forma esplicita la soluzione del seguente problema di Cauchy
0 1+2x
y = cos y
y(0) = π
Soluzione. Per prima cosa controlliamo il dominio del problema di Cauchy, ovvero f (x) = 2x + 1 ha come dominio Df = R
1
e g(y) = cos
ha come dominio Dy = R \ { π2 + 2kπ} con k ∈ Z.
y
Calcoliamo allora l’integraleR generale dell’equazione
differenziale R(a variabili separabili) y 0 cos y = 1 + 2x, risolviamo
R
separatamente i due integrali:
cos yy 0 = cos y dy = sin y + c1 ; (1 + 2x) dx = x + x2 + c2 . Quindi eguagliandoli
sin y = x + x2 + c (dove c = c2 − c1 ∈ R).
Determiniamo il valore di c. Per il problema di Cauchy si ha che f (0) = π, ovvero che sin(y(0)) − c = sin(π) − c = 0,
ovvero che c = 0.
Determinato c scriviamo la soluzione del problema di Cauchy sin(y) = x2 + x, invertiamo la funzione seno e otteniamo
y = arcsin(x2 +x) che non è la soluzione del problema di Cauchy, in quanto arcsin(0) = 0 6= π. Infatti ci siamo dimenticati di
considerare che l’arcoseno inverte il seno solo nell’intervallo ]− π2 ; π2 [, mentre la nostra soluzione dovrebbe stare nell’intervallo
] π2 ; 3π
[, quindi la soluzione del problema di Cauchy è y = arcsin(x2 + x) + π.
2
Esercizio 2.4. Calcolare la soluzione del seguente problema di Cauchy
0
y = tan(x)y + x2
y(0) = 0
Soluzione. Come prima consideriamo prima i domini delle funzioni in gioco. L’unico che crea problemi è quello della
tangente, infatti tan x esiste solo se x 6= π2 + kπ con k ∈ Z.
Data la condizione di Cauchy y(0) = 0, allora l’intervallo della soluzione deve essere I =] − π2 , π2 [.
0
Calcoliamo quindi la soluzione dell’equazione differenziale, partendo dall’omogenea associata y 0 = tan(x)y, yy = tan(x),
R
R sin x
y0
sin x
= cos
; quindi, integrando ambo i membri, dy
= cos
dx si ottiene log |y| = − log | cos x| + c da cui, per le note
y
x
y
x
proprietà del logaritmo ed esponenzializzando tutto, si ottiene y = cosc x .
[6] È facile ricavare il risultato espresso qui se anzichè svolgere gli integrali come indefini, si svolgono gli integrali definiti.
R
R
dη
Infatti yy g(η(t))
= xx f (t) dt = G(y) − G(y0 ) = F (x) − F (x0 ) da cui G(x) = F (x) + G(y0 ) + F (x0 ) e quindi C =
0
0
G(y0 ) − F (x0 ).
Matteo Gallone - Analisi Matematica II
2.4
Equazioni differenziali: primi elementi
Equazioni lineari del secondo ordine
15
Cerchiamo ora la soluzione dell’equazione differenziale (finora abbiamo trattato l’omogenea), sapendo che la soluzione è
c(x)
della forma y(x) = cos x (si usa il metodo della variazione delle costanti), basta determinare c(x)[7] . Sapendo che y = cosc x
si ha che y 0 =
c0 cos x+c sin x
.
cos2 x
Sostituendo y e y 0 nell’equazione differenziale si ottiene
c0
ovvero eliminando i termini uguali =
di Cauchy è y = (x2 − 2) tan x + 2x.
x2
cos x. Integrando ambedue i
membri[8]
c0
cos(x)
x
+ c tan
= tan(x) cosc x + x2 ,
cos x
si ottiene che la soluzione del problema
Esercizio 2.5. Al variare di α ∈ R studiare l’esistenza e l’unicità della soluzione del
seguente problema di Cauchy:
3 0
x y −y+1=0
y(0) = α
Soluzione. Si potrebbe supporre x3 6= 0 ⇒ x 6= 0 ma y è calcolata in 0 quindi supporre ciò è pericoloso. Tuttavia lo
facciamo comunque sperando che non dia problemi nella soluzione. Dividiamo quindi ambedue i membri per x3 , otteniamo
0
y 0 − xy3 + x13 = 0. Risolviamo quindi l’omogenea y 0 = xy3 , che, separando le variabili, diventa yy = x13 . Integriamo
− 12
2x
ambedue i membri e otteniamo log |y| = − 2x12 + D. Esponenzializzando si ottiene y = ce
dell’equazione non omogenea sarà della forma y =
scrittura. Calcoliamo quindi
− 12
2x
y0
1
=
−
c0 e 2x2
+
1
2x2
x3
1
2x2
x3
ce
− 1
c(x)e 2x2
1
2x2
3
x
−
. D’ora in poi scriveremo c al posto di c(x) per leggerezza di
. Sostituendo y e y 0 nell’equazione differenziale non omogenea ottengo
1
−
−
. Quindi la soluzione
c0 e
− ce
+ x13 = 0. Eliminando i termini uguali e isolando c0 si ottiene c0 = − ex2x
+ ce
3 . Integro tutti e
due i membri di questa equazione in un intervallo (x0 , x) con x e x0 concordi (ovvero tali che xx0 > 0). Ottengo quindi
1
1
1
1
1
R
2
2x2
2
2
c(x)−c(x0 ) = − xx e 2t
dt, ovvero c(x) = c(x0 )+[e 2t2 ]x
x0 = c(x0 )+e 2x −e 0 . Abbiamo trovato quindi c(x) = e 2x +k
t3
0
1
2x2
0
∈ R. Poichè tra le ipotesi entro cui ho integrato c’è la concordanza dei due estremi di integrazione
con k = c(x0 ) + e
allora, avrò in generale funzioni diverse in base all’intervallo di integrazione. Quindi la generica y(x) sarà
(
1
− 1
e 2x2 (k1 + e 2x2 ) x > 0
y(x) =
1
1
−
e 2x2 (k2 + e 2x2 ) x < 0
1
1
ovvero y1 = k1 e 2x2 + 1 e y2 = k2 e 2x2 + 1. Calcoliamo ora i limiti limx→0− y2 = 1 e limx→0+ y1 = 1.[9] Ovvero le funzioni
raccordano in 0 se e solo se α = 1. Quindi si avranno soluzioni solo per α = 1.
2.4
Equazioni lineari del secondo ordine
Sia I ⊂ R un intervallo aperto e siano a, b, f ∈ C(I) funzioni continue. Studiamo
l’equazione differenziale del secondo ordine
y 00 + a(x)y 0 + b(x)y = f (x),
x∈I
(2.10)
L’incognita è una funzione y ∈ C 2 (I). L’equazione differenziale si dice lineare perchè
l’operatore differenziale L : C 2 (I) → C(I), L(y) = y 00 + a(x)y 0 + b(x)y è un operatore
lineare. Il seguente teorema di esistenza e unicità della soluzione per il relativo problema
di Cauchy è il corollario di un teorema più generale di cui non forniamo ne enunciato ne
dimostrazione.
Teorema 2.4.1. Siano I ∈ R un intervallo aperto, x0 ∈ I e y0 , y00 ∈ R, e a, b, f ∈ C(I)
funzioni continue. Allora il problema di Cauchy
y 00 + a(x)y 0 + b(x)y = f (x) x ∈ I
y(x0 ) = y0
(2.11)
y 0 (x ) = y 0
0
0
ha un’unica soluzione y ∈ C 2 (I).
[7] Per
leggerezza di scrittura si scriverà c al posto di c(x).
R 2
svolti qui i calcoli in dettaglio. Da c0 = x2 cos x, integrando ambedue i membri si ha C =
R 2 x cos x dx
che si svolge
di x e si integra la funzione trigonometrica: C = x cos x dx =
R per parti due volte. Si deriva la potenza
R
x2 sin x + 2x sin x dx = x2 sin x + 2x cos x − 2 cos x dx = (x2 − 2) sin x + 2x cos x. Sostituendo ora C nell’equazione
[8] Vengono
c(x)
(x2 −2) sin x+2x cos x
=
cos x
cos x
1
−
perchè e 2x2 tende a 0. Inoltre
differenziale si ha y(x) =
[9] Il
limite vale 1
dominio delle y1 e y2 .
= (x2 − 2) tan x + 2x, che è la soluzione dell’equazione cercata.
i limiti vengono fatti solo tendendo da sinistra o da destra per via del
Matteo Gallone - Analisi Matematica II
16
Equazioni differenziali: primi elementi
2.5
Equazioni lineari del secondo ordine
Studiamo il caso omogeneo f = 0. Consideriamo l’insieme delle soluzioni dell’equazione omogenea S = {y ∈ C 2 (I) : y 00 (x) + a(x)y 0 (x) + b(x)y(x) = 0, x ∈ I}. Dal teorema
precedente discende il seguente fatto:
Proposizione 2.4.2. Detto S = {y ∈ C 2 (I) : y 00 (x) + a(x)y 0 (x) + b(x)y(x) = 0} l’insieme
non vuoto delle soluzioni dell’equazione differenziale, esso è uno spazio vettoriale su un
campo reale di dimensione 2.
Dimostrazione. Sia S uno spazio vettoriale e L : y 00 + a(x)y 0 + b(x)y = 0; per ogni coppia di costanti α, β ∈ R e y1 , y2 ∈ S
soluzioni per l’equazione differenziale, ovvero tali che L(y1 ) = L(y2 ) = 0, risulta L(αy1 + βy2 ) = αL(y1 ) + βL(y2 ) = 0, e
quindi αy1 + βy2 ∈ S.
Dimostriamo ora che S ha dimensione esattamente 2. Fissato un punto x0 ∈ I, definiamo la trasformazione T : S → R2
definita nel seguente modo: T (y) = (y(x0 ), y 0 (x0 )). La trasformazione T è lineare. Se è anche biiettiva allora segurià che S
ed R2 sono linearmente isomorfi e dunque dim(S) = dim(R2 ) = 2.
Dimostriamo l’iniettività. Se T (y) = T (z) con y, z ∈ S allora y e z risolvono lo stesso problema di Cauchy (2.11) (con
f = 0). Siccome per il Teorema 2.4.1 la soluzione del problema è unica, allora si deve avere necessariamente y = z.
Dimostriamo la suriettività. Dati (y0 , y00 ) ∈ R2 , dal teorema Teorema 2.4.1 segue l’esistenza di y ∈ S tale che T (y) =
(y0 , y00 ). Quindi T è biiettiva ed abbiamo dimostrato che S ha dimensione 2.
Lo spazio vettoriale S delle soluzioni è di dimensione 2, quindi ammette una base
composta da due soluzioni. Consideriamo due soluzioni y1 , y2 ∈ S (non necessariamente
linearmente indipendenti) e formiamo la matrice Wronskiana
y1 (x) y2 (x)
Wy1 ,y2 (x) =
y10 (x) y20 (x)
a cui è associato un determinante Wronskiano
y1 (x) y2 (x)
w(x) = det
= y1 (x)y20 (x) − y2 (x)y10 (x)
y10 (x) y20 (x)
Chiaramente risulta w ∈ C 1 (I) e inoltre w0 = y10 y20 − y10 y20 + y1 y200 − y2 y100 . I primi due
addenti si annullano e si ricava poi dalla (2.10) y 00 si ha y 00 = −a(x)y 0 − b(x)y. Quindi
sostituiamo quanto ottenuto ed abbiamo w0 = y1 (−a(x)y20 −b(x)y2 )−y2 (−a(x)y1 −b(x)y1 ).
Sviluppando i calcoli[10] si ottiene w0 (x) = −a(x)w(x).
Integrando l’equazione differenziale così ottenuta scopriamo che il determinante Wronskiano ha la forma
R
− x a(t) dt
w(x) = w(x0 )e x0
,
x∈I
Notiamo, in particolare, che se w(x0 ) = 0 in un punto x0 ∈ I allora w = 0 in tutti i
punti.
Proposizione 2.4.3. Siano y1 , y2 ∈ S soluzioni dell’equazione omogenea e sia w =
det Wy1 ,y2 il corrispondente determinante Wronskiano. Allora
A) y1 , y2 sono linearmente dipendenti se e solo se esiste x0 ∈ I tale che w(x0 ) = 0,
ovvero se e solo se w = 0 su I;
B) y1 , y2 sono linearmente indipendenti se e solo se esiste x1 ∈ I tale che w(x1 ) 6= 0,
ovvero se e solo se w 6= 0 su I.
Dimostrazione. Proviamo A). Se y1 , y2 sono linearmente dipendenti allora esistono (α, β) 6= (0, 0) (con (α, β) ∈ R2 ) tali che
αy1 + βy2 = 0 su I. Derivando vale anche αy10 + βy20 = 0 su I, e dunque
y1 y2
α
0
=
0
0
y1 y2
β
0
Segue che w = 0 su tutto I.
Dimostriamo ora l’implicazione inversa. Supponiamo ora che w(x0 ) = 0 in un punto x0 ∈ I. Allora esistono (α, β) 6=
(0, 0) tali che
y1 (x0 ) y2 (x0 )
α
0
=
0
0
y1 (x0 ) y2 (x0 )
β
0
La funzione z = αy1 + βy2 è in S e verifica z(x0 ) = 0 e z 0 (x0 ) = 0. Dall’unicità della soluzione per il problema di
Cauchy segue che z = 0 e quindi y1 , y2 sono linearmente dipendenti.
L’affermazione B) segue da A) per negazione.
[10] Semplicemente applicando la proprietà distributiva w 0 (x) = −a(x)y y 0 − b(x)y y + a(x)y 0 y + b(x)y y . Il secondo
1 2
1 2
1 2
1 2
e il quarto addendo sono opposti, quindi la loro somma è 0; w0 (x) = −a(x)y1 y20 + a(x)y10 y2 . Raccogliendo −a(x) si ottiene
w0 (x) = −a(x)(y1 y20 − y10 y2 ). Ma y1 y20 − y10 y2 = w, quindi w0 (x) = −a(x)w(x).
Matteo Gallone - Analisi Matematica II
2.6
2.5
Equazioni differenziali: primi elementi
Metodo della variazione delle costanti
17
Metodo della variazione delle costanti
Una volta trovate le soluzioni dell’equazione omogenea possiamo calcolare una soluzione
dell’equazione non omogenea (2.10).
Sia y1 , y2 una base di soluzioni per l’equazione omogenea associata. Cerchiamo una
soluzione del tipo
y = c1 y1 + c2 y2
(2.12)
dove c1 , c2 : I → R sono funzioni da determinare. Derivando la relazione si ottiene
y 0 = c01 y1 + c1 y10 + c02 y2 + c2 y20 e, imponendo la condizione c01 y1 + c02 y2 = 0 l’espressione
precedente si riduce alla seguente
y 0 = c1 y10 + c2 y20
(2.13)
y 00 = c01 y10 + c1 y100 + c02 y20 + c2 y200
(2.14)
Derivando nuovamente si ottiene
Sostituendo la (2.13) e la (2.14) nella (2.10), dopo alcuni calcoli[11] si ottiene la seconda
condizione
c01 y10 + c02 y20 = f
(2.15)
Mettendo insieme le condizioni si arriva al sistema
0
c1 y1 + c02 y2 = 0
c01 y10 + c02 y20 = f
che, scritto in forma matriciale, assume la forma
0 0
c1
y1 y2
=
f
c02
y10 y20
Si noti che è apparsa la matrice Wronskiana di y1 , y2 . Per la Proposizione 2.4.3 questa
matrice è invertibile in ogni punto x ∈ I. Questo permette di risolvere il sistema in c01 e
c02 :
0 −1 c1
y1 y2
0
=
(2.16)
c02
y10 y20
f
Le due equazioni del sistema possono essere integrate. Questo procedimento determina c1
e c2 a meno di due costanti additive che appaiono nel processo di integrazione. Il valore
di queste due costanti può essere determinato dalle condizioni iniziali.
2.6
Equazioni a coefficenti costanti
Le equazioni differenziali del secondo ordine a coefficenti costanti sono equazioni differenziali del tipo
y 00 + ay 0 + by = f (x)
(2.17)
dove a, b ∈ R sono costanti. Le soluzioni sono nella forma y(x) = eλx dove λ ∈ C è
un parametro complesso. Sostituendo le derivate y 0 = λeλx e y 00 = λ2 eλx nell’equazione
differenziale si ottiene
eλx (λ2 + aλ + b) = 0
[11] Si parte dall’equazione y 00 + ay 0 + by = f (per leggerezza di scrittura a = a(x), b = b(x), . . . ) e si sostituisce quanto
trovato in (2.13) e (2.14): c01 y10 + c1 y100 + c02 y20 + c2 y200 + a(c1 y10 + c2 y20 ) + b(c1 y1 + c2 y2 ) = f . Svolgendo le parentesi tonde
c01 y10 + c1 y100 + c02 y20 + c2 y200 + ac1 y10 + ac2 y20 + bc1 y1 + bc2 y2 = f , raccogliendo c1 e c2 infine si ottiene c1 (y100 + ay10 + by1 ) +
c2 (y200 + ay20 + by2 ) + c01 y10 + c02 y20 = f . Usando ora il fatto che y1 e y2 risolvono l’equazione omogenea si ottiene la condizione
c01 y10 + c02 y20 = f .
Matteo Gallone - Analisi Matematica II
Equazioni differenziali: primi elementi
2.6
Equazioni a coefficenti costanti
18
Siccome eλx 6= 0, tale equazione è verificata se e solo se λ verifica l’equazione caratteristica:
λ2 + aλ + b = 0
Sia ora ∆ = a2 − 4b il discriminante dell’equazione. Si possono presentare tre casi: ∆ > 0,
∆ = 0, ∆ < 0.
∆ > 0.
L’equazione caratteristica ha due soluzioni reali distinte:
√
√
−a − ∆
−a + ∆
λ1 =
e λ2 =
2
2
In questo caso la soluzione generale della (2.17) è una combinazione lineare delle soluzioni
y1 (x) = eλ1 x e y2 (x) = eλ2 x , che sono linearmente indipendenti:
y(x) = c1 eλ1 x + c2 eλ2 x
∆ < 0.
(2.18)
L’equazione caratteristica ha due soluzioni complesse coniugate
√
√
−a + i −∆
−a − i −∆
= α + iβ e λ2 =
= α − iβ
λ1 =
2
2
Dove si è posto α = − a2 e β =
√
−∆
.
2
Le funzioni
z1 (x) = e(α+iβ)x = eαx eiβx = eαx (cos βx + i sin βx)
z2 (x) = e(α−iβ)x = eαx e−iβx = eαx (cos βx − i sin βx)
sono soluzioni a valori complessi dell’equazione differenziale. Nell’ultima eguaglianza è
stata usata la formula di Eulero[12] . Le funzioni
z1 (x) + z2 (x)
= eαx cos βx
2
z1 (x) − z2 (x)
y2 (x) =
= eαx sin βx
2i
y1 (x) =
sono soluzioni a valori reali dell’equazione differenziale. Più in generale, le funzioni y1 e
y2 sono linearmente indipendenti e quindi sono una base di soluzioni per tale equazione.
la soluzione generale sarà combinazione lineare di y1 e y2 ed assumerà la forma
y(x) = eαx (c1 cos βx + c2 sin βx)
(2.19)
L’equazione caratteristica ha una sola soluzione reale λ = − a2 con molteplicità
2. In questo caso il metodo produce una sola soluzione y1 (x) = eλx . Un calcolo diretto
mostra che anche la funzione y2 (x) = xeλx è una soluzione[13] linearmente indipendente
dalla precedente.
La soluzione generale dell’equazione è dunque una combinazione lineare delle due
∆ = 0.
y(x) = (c1 + c2 x)eλx ,
c1 , c2 ∈ R
(2.20)
Esercizio 2.6. Trovare le soluzioni dell’equazione differenziale omogenea del secondo
ordine a coefficenti costanti:
y 00 − 5y 0 + 4y = 0
[12] Ovvero
eix = cos x + i sin x.
dall’equazione y 00 + ay 0 + by = 0. Sostituiamo y = xeλx , y 0 = eλx + λxeλx , y 00 = λeλx + λ(eλx + λxeλx ) =
λx
2
λx
2λe + λ xe
ed otteniamo 2λeλx + λ2 xeλx + a(eλx + λxeλx ) + bxeλx = 0. Raccogliendo xeλx e eλx otteniamo:
(λ2 + aλ + b)xeλx + (2λ + a)eλx = 0. Nell’ultimo passaggio si è usato il fatto che λ risolve l’equazione caratteristica e quindi
λ2 + aλ + b = 0 e che λ = − a2 , e quindi 2λ − a = a − a = 0.
[13] Partiamo
Matteo Gallone - Analisi Matematica II
2.6
Equazioni differenziali: primi elementi
Equazioni a coefficenti costanti
19
Soluzione. L’equazione caratteristica è λ2 − 5λ + 4 = 0 che ha come soluzioni λ1 = 4 e λ2 = 1. Ovvero due soluzioni
linearmente indipendenti saranno le y1 = eλ1 x = e4x e y2 = eλ2 x = ex . Quindi la soluzione generale sarà combinazione
lineare delle due, ovvero y = C1 e4x + C2 ex .
Esercizio 2.7. Trovare le soluzioni dell’equazione differenziale omogenea del secondo
ordine a coefficenti costanti:
y 00 + 4y 0 + 13 = 0
√
√
Soluzione. L’equazione caratteristica è λ2 + 4λ + 13 = 0, che ha come soluzione[14] λ = −2 ± 4 − 13 = −2 ± −9 =
−2 ± 3i. A questo punto saranno soluzioni dell’equazione differenziale le funzioni g1 e g2 così definite: g1 = eλ1 x =
e(−2+3i)x = e−2x e3ix = e−2x (cos(3x) + i sin(3x)), e g2 = eλ2 x = e(−2−3i)x = e−2x e−3ix = e−2x (cos(−3x) + i sin(−3x)) =
e−2x (cos(3x) − i sin(3x)) (negli ultimi passaggi si è usata la formula di Eulero[12] per scrivere l’esponenziale complesso in forma di seni e coseni, e parità / disparità di coseno / seno per portare fuori il segno - dalle rispettive funzioni). Le g1 e g2 saranno quindi una base di soluzioni per l’equazione differenziale data, quindi la anche la loro somma e la loro differenza saranno base di soluzioni per l’equazione differenziale data; in particolare saranno una base di
cos(3x)+i sin(3x)+cos(3x)−i sin(3x)
−g2
2
= e−2x
= e−2x cos(3x) e y2 = g12i
=
soluzioni y1 e y2 definite così: y1 = g1 +g
2
2
cos(3x)+i sin(3x)−cos(3x)+i sin(3x)
= e−2x sin(3x). La generica soluzione sarà quindi una combinazione lineare dei due
e−2x
2i
elementi della base, ovvero y = e−2x (C1 cos(3x) + C2 sin(3x)).
Esercizio 2.8. Risolvere l’equazione differenziale di secondo ordine non omogenea a
coefficenti costanti:
y 00 + y 0 − 6y = xe2x
Soluzione. Per prima cosa bisogna risolvere l’equazione omogenea associata y 00 + y 0 − 6y = 0.
Risolviamo quindi l’omogenea associata. L’equazione caratteristica è λ2 + λ − 6 = 0 che ha come soluzioni λ1 = 2 e
λ2 = −3. Dunque due soluzioni linearmente indipendenti dell’equazione omogenea associata saranno g1 = e2x e g2 = e−3x .
La soluzione generica sarà g = c1 e2x + c2 e−3x .
Per risolvere l’equazione non omogenea, ora bisogna usare il metodo della variazione delle costanti per cui inserendo g1 ,
g2 , g10 e g20 nel sistema wronskiano si ottiene
0
0 2x
c1 g1 + c02 g2 = 0
c1 e + c02 e−3x = 0
=
0
0
0
0
c1 g1 + c2 g2 = f
2c01 e2x − 3c02 e−3x = xe2x
Dalla prima equazione si ricava c02 = −c01 e5x , si sostituisce ora c02 nella seconda equazione ottenendo 2c01 e2x − 3c01 e2x = xe2x
è chiaro che ora si possono moltiplicare ambedue i membri dell’ equazione per e−2x ottenendo −c01 = x, ovvero c01 = −x. Il
sistema wronskiano diventa quindi, sostituendo questo risultato nella prima equazione:
0
c2 = −xe5x
c01 = −x
R
2
Si tratta quindi di due equazioni differenziali banali del primo ordine che danno per soluzione c1 = x2 +k1 e c2 = xe5x dx =
R
1
1 5x
xe5x − e5x dx = 15 xe5x − 25
e + k2 .
5
2
1 5x
e + k2 e−3x e, notiamo,
La soluzione generale dell’equazione differenziale sarà allora y = x2 + k1 e2x + 15 xe5x − 25
che è definita sempre a meno di due costanti.
Esercizio 2.9. Risolvere il seguente problema di Cauchy
y 00 − 5y 0 + 4y = 0
y(0) = 5
y 0 (0) = 8
Soluzione. L’equazione differenziale è stata svolta precedentemente nell’Esercizio 2.6 ed ha come soluzione generica y =
C1 e4x + C2 ex . Risolvere il problema di Cauchy significa fare in modo che siano verificate dalla soluzione le condizioni
y(0) = 5 e y 0 (0) = 8. Per farlo calcoliamo la generica y 0 (x) = 4C1 e4x + C2 ex . Risolvere il problema di Cauchy significa
risolvere
y(0) = C1 + C2 = 5
y 0 (0) = 4C1 + C2 = 8
L’unica soluzione del sistema è C1 = 1 e C2 = 4 da cui si ricava che l’unica soluzione del problema di Cauchy è y = e4x +4ex .
Esercizio 2.10. (Applicazione alla fisica) Si consideri un disco di raggio R = 1m che
ruota con velocità angolare ω = 10rad/s attorno ad un asse verticale passante per il suo
centro. Lungo un diametro del disco è realizzata una scanalatura dove può scorrere senza
attrito una pallina di massa m = 0.1kg, collegata al centro O del disco da una molla di
costante elastica k = 5N/m e lunghezza a riposo nulla. Se inizialmente la pallina è tenuta
in quiete rispetto al disco, alla distanza di 50cm da O, determinare la sua velocità radiale
quando sta per uscire dalla scanalatura.
[14] Si
usa la formula ridotta. Data un’equazione di secondo
grado nell’incognita λ, la sua forma generale è aλ2 + bλ + c = 0,
q
b±
−2
( 2b )2 −ac
la formula ridotta che ne fornisce le soluzioni è λ =
.
a
Matteo Gallone - Analisi Matematica II
Equazioni differenziali: primi elementi
2.6
Equazioni a coefficenti costanti
20
Soluzione. Si scelga come riferimento un sistema solidale al disco (quindi un sistema non inerziale), con un unico asse x
orientato secondo la scanalatura del disco. Si scelga come verso positivo il verso uscente dal disco in direzione della posizione
all istante t0 della pallina.
Fatto ciò si scriva l’equazione delle forze agenti sulla pallina:
F = Felastica + Fcentrif uga
Si ricordino ora le espressioni delle rispettive forze, ovvero:
Felastica = −kx
Fcentrif uga = ω 2 rm
Si sostituiscano le espressioni trovate per le forze nella prima equazione e ricordando il secondo principio della dinamica,
ovvero F = ma. Si potrà allora scrivere:
F = ma = −kx + ω 2 rm
Ricordiamo ora la definizione di accelerazione (a =
d2 x
)
dt2
m
e sostituiamola nella quarta equazione:
d2 x
= −kx + ω 2 rm
dt2
Ricordando che il raggio utilizzato nella forza centrifuga è variabile nel tempo, e anzi, è proprio uguale ad x allora possiamo
scrivere r = x. Portiamo tutto al primo membro e dividiamo ambedue i membri della (5) per m, otteniamo:
d2 x
k
+ x − ω2 x = 0
dt2
m
Come si può facilmente notare, quella appena scritta è un’equazione differenziale del secondo ordine lineare e omogenea, a
coefficenti costanti. La soluzione è quindi:
q
x(t) = c1 e
k t
ω2 − m
q
k t
− ω2 − m
+ c2 e
Per determinare il valore delle costanti c1 e c2 serve derivare la soluzione generale rispetto al tempo. La derivazione non
presenta particolari problemi e dà come risultato:
r
q
q
k t
k t
k
ω2 − m
− ω2 − m
v(t) = ω 2 −
c1 e
− c2 e
m
Mettendo a sistema la solzione generale e la sua derivata, e imponendo le condizioni iniziali del problema (x0 = 0.5m e
v0 = 0 m
) evince che c1 = c2 = 0.25 m.
s
A questo punto, riscrivendo la soluzione generale, con c1 = c2 = c si avrà:
x(t) = ce
q
Riconoscendo in ce
k t
ω2 − m
q
k t
− ω2 − m
+ ce
q
k t
ω2 − m
q
k t
− ω2 − m
+ ce
la scrittura del coseno iperbolico, allora possiamo riscrivere la x(t) come:
r
k
x(t) = 2c · cosh
ω2 − t
m
Derivando questa si ottiene un’espressione per la velocità dipendente dal tempo:
r
r
k
k
v(t) = 2c ω 2 −
· sinh
ω2 − t
m
m
Per trovarci la velocità in uscita (ovvero quando r = x = 1m) si ricava dalla funzione trovata per x(t) un’ espressione per
il tempo sostituendo a x(t) = 1. Si otterrà:
x
settcosh 2c
t= q
k
ω2 − m
Si sostituisca l’espressione appena ottenuta nella funzione trovata per la velocità. Si otterrà:
r
x k
m
v(t) = 2c ω 2 − sinh settcosh
= 6.12
m
2c
s
Matteo Gallone - Analisi Matematica II
CAPITOLO
3
Curve in Rn
3.1
Definizioni di base
Vengono innanzi tutto introdotte alcune notazioni e definizioni che useremo in seguito.
Il nostro spazio di lavoro sarà Rn , ovvero R
· · × R}; un suo elemento generico sarà
| × ·{z
n volte
x ∈ Rn ; x = (x1 , . . . , xn ), ove le x1 , . . . , xn sono dette coordinate di x.
Definizione 3.1.1. Definiamo norma (euclidea) [1] di un vettore generico (x1 , . . . , xn ) la
funzione k · k : Rn → R definita così:
q
kxk = x21 + · · · + x2n
Definizione 3.1.2. Si dice curva parametrizzata in Rn una funzione continua ϕ : I → Rn
con I ⊆ R intervallo; sia poi ϕ(t) = (ϕ1 (t), . . . , ϕn (t)), diremo (ϕ1 (t), . . . , ϕn (t)) insieme
delle coordinate di una curva, e le sue equazioni
x1 = ϕ1 (t)
..
.
xn = ϕn (t)
si dicono equazioni parametriche della curva.
Definizione 3.1.3. Sia S = ϕ(I) = {ϕ(t) ∈ Rn : t ∈ I} un insieme; tale insieme S viene
detto supporto o sostegno della curva ϕ.
Esempio. Le curve ϕ1 : [0, 2π] → R2 e ϕ2 : [0, 4π] → R2 di equazioni parametriche:
xt (t) = cos t
xt (t) = cos t
t ∈ [0, 4π]
ϕ1 =
t ∈ [0, 2π] ϕ2 =
yt (t) = sin t
yt (t) = sin t
pur avendo il medesimo sostegno (la circonferenza centrata sull’origine di raggio 1) sono due curve distinte. Infatti ϕ1
rappresenta il moto di una particella che compie un giro completo sulla circonferenza ruotando in senso antiorario, mentre
ϕ2 rappresenta il moto di una particella che compie due giri completi ruotando nello stesso senso.
Esempio. La curva ϕ : [0, π/2] → R2 di equazioni parametriche ϕ(t) = (a cos t, b sin t) con a, b > 0 rappresenta l’arco di
ellisse di equazione
x2
a2
+
y2
b2
= 1 contenuto nel primo quadrante, percorso in senso antiorario.
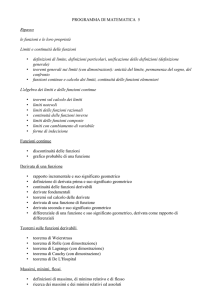
Esempio. La curva di equazioni parametriche
ϕ(t) =
x = 2 cos t
y = sin 2t
t ∈ [0, 2π]
ha come sostegno:
[1] Per
una definizione più generale e rigorosa di norma si rimanda a Definizione 4.1.2.
Matteo Gallone - Analisi Matematica II
Curve in Rn
3.1
Definizioni di base
22
3
2*cos(t),sin(2*t)
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
Si osservi che la curva passa due volte per l’origine (ovvero per t = π/2 e t = 3π/2).
Definizione 3.1.4. Una curva ϕ si dice semplice se è iniettiva.
Definizione 3.1.5. Se I = [a, b] è un intervallo con a, b ∈ R e ϕ(a) = ϕ(b) allora la curva
si dice chiusa.
Esempio. La curva ϕ1 (t) = (cos t, sin t) con t ∈ [0, 2π] è una curva semplice e chiusa, mentre la curva ϕ2 (t) = (cos t, sin t)
con t ∈ [0, 4π] è una curva chiusa ma non semplice (si tratta delle due circonferenze già analizzate prima). La curva
considerata nel secondo esempio, l’arco di ellisse, è semplice ma non chiusa. La curva considerata nel terzo esempio è chiusa
ma non semplice.
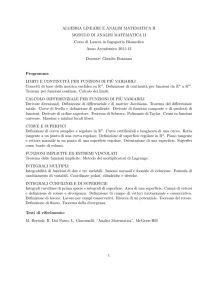
Esempio. La curva (strofoide) di equazioni parametriche ϕ(t) = (t3 − t, t2 − 1) il cui sostegno è
2
t**3-t,t**2-1
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-3
-2
-1
0
1
2
3
non è una curva semplice, in quanto ϕ(1) = ϕ(−1) = (0, 0). La sua restrizione all’intervallo Iφ [−1, 1] è una curva semplice
e chiusa detta cappio di strofoide.
Definizione 3.1.6. Una curva γ si dirà continua in t0 se
lim kγ(t0 + h) − γ(t0 )k = 0
h→0
Matteo Gallone - Analisi Matematica II
3.1
Curve in Rn
Definizioni di base
23
Definizione 3.1.7. Una curva γ si dice derivabile in t0 se esiste un vettore v ∈ Rn tale
che
γ(t0 + h) − γ(t0 )
lim − v
(3.1)
=0
h→0
h
tale vettore, se esiste, è unico ed è detto derivata o vettore derivata di γ in t0 . Esso viene
usualmente denotato con γ 0 (t0 ).
Proposizione 3.1.8. Una curva γ è continua se e solo se sono continue tutte le sue
componenti.
Dimostrazione. L’implicazione ⇒ è banale in quanto se vale limh→0 kγ(t0 + h) − γ(t0 )k = 0 allora, poichè kγi (t0 + h) −
γi (t0 )k ≤ kγ(t0 + h) − γ(t0 )k allora si ha necessariamente che limh→0 kγi (t0 + h) − γi (t0 )k = 0 per ogni i.
L’implicazione inversa invece viene dedotta
Pn dalla disuguaglianza triangolare (vedi Definizione 4.1.2). Infatti se
limh→0 kγi (t0 + h) − γP
i (t0 )k = 0 allora anche
i=1 limh→0 kγi (t0 + h) − γi (t0 )k = 0. Ma per la disuguaglianza triangolare
kγ(t0 + h) − γ(t0 )k ≤ n
i=1 kγi (t0 + h) − γi (t0 )k e quindi, per confronto γ è continua.
Proposizione 3.1.9. Una curva γ è derivabile se e solo se sono derivabili tutte le sue
componenti.
Dimostrazione. È sostanzialmente identica a quella della proposizione precedente. Infatti, per la disuguaglianza triangolare
P
γ (t +h)−γ (t )
γ(t +h)−γ(t0 )
γi (t0 +h)−γi (t0 )
(vedi Definizione 4.1.2) si ha k i 0 h i 0 − vi k ≤ k 0 h
− vk ≤ n
− vi k. Quindi l’imi=1 k
h
plicazione ⇒ segue dalla disuguaglianza tra il primo e il secondo termine, mentre l’implicazione ⇐ segue dalla disuguaglianza
tra il secondo e il terzo termine.
Proposizione 3.1.10. Se una curva γ è derivabile allora è anche continua.
Dimostrazione. Se γ è derivabile in t0 allora kγ(t0 +h)−γ(t0 )k = |h|k
γ(t +h)−γ(t0 )
|h|k 0 h
−
γ 0 (t0 )k
+
|h|kγ 0 (t0 )k
γ(t0 +h)−γ(t0 )
k
h
= |h|k
γ(t0 +h)−γ(t0 )
−γ 0 (t0 )+γ 0 (t0 )k
h
≤
che tende a 0 per h → 0, ovvero γ è continua.
Definizione 3.1.11. Una curva si dice regolare se ϕ0 (t) 6= 0 ∀t ∈ I.
Esempio. Il cappio di strofoide è una curva regolare. Infatti le derivate x0 (t) = 3t2 − 1 e y 0 (t) = 2t non si annullano mai
contemporaneamente. Si noti che nel punto di coordinate (0, −1), corrispondente al√valore t = 0√del parametro, risulta
0
0
y 0 (0) = 0. La
√ tangente in quel punto è quindi orizzontale. Analogamente, essendo x ( 3/3) = x (− 3/3) = 0, la curva nei
punti t = ± 3/3 ha tangente verticale.
Esempio. Si consideri la (già considerata precedentemente) curva ϕ(t) = (2 cos t, sin 2t). In questo caso ϕ0 (t) = (−2 sin t, 2 cos 2t),
si verifica facilmente che (x0 (t))2 + (y 0 (t))2 > 0 per ogni t ∈ (0, 2π).
Abbiamo già osservato che la curva passa nell’origine in corrispondenza dei valori del parametro t = π/2 e t = 3π/2.
Calcolando le derivate nel punto si ha che le rette tangenti sono y = x e y = −x.
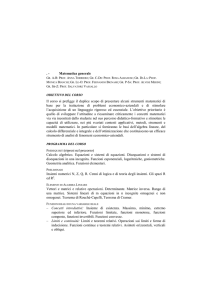
Esempio. La curva di equazioni parametriche ϕ(t) = (t3 , t2 ) definita in [−1, 1] non è una curva regolare in quanto ϕ0 (0) = 0.
1.5
t**3,t**2
1
0.5
0
-0.5
-1
-0.5
0
0.5
Matteo Gallone - Analisi Matematica II
1
Curve in Rn
3.2
Lunghezza di una curva
24
Infatti si può vedere che nel punto (0, 0) la curva presenta una cuspide. Consideriamo ora la curva come unione di due
curve regolari ϕ+ (con sostegno nel primo quadrante) e ϕ− con sostegno nel secondo quadrante. Le due curve, che hanno
in comune l’origine degli assi, sono regolari.
Definizione 3.1.12. Sia ϕ una curva regolare. Si definisce il versore tangente alla curva
0
.
nel punto ϕ(t), il versore T (t) = kϕϕ0 (t)
(t)k
Definizione 3.1.13. Siano ϕ ∈ C 1 (I, Rn ) regolare e t0 ∈ I fissato; la retta di equazioni
parametriche x(t) = (t − t0 )ϕ0 (t0 ) + ϕ(t0 ) si dice retta tangente alla curva nel punto ϕ(t0 ).
Definizione 3.1.14. Data f : I → R una funzione continua; allora la curva ϕ : I → R
tale che ϕ(x) = (x, f (x)) con x ∈ I si dice data in forma cartesiana oppure in forma di
grafico cartesiano.
Osservazione 3.1.15. Se f ∈ C 1 allora ϕ è sempre regolare.
Definizione 3.1.16. Sia ρ : I → [0, ∞) una funzione continua. Una curva piana ϕ : I →
R2 si dice data in coordinate polari se è scritta nella forma ϕ(ϑ) = (ρ(ϑ) cos(ϑ), ρ(ϑ) sin(ϑ)).
L’equazione ρ = ρ(ϑ) si dice equazione polare della curva.
Supponiamo ora le stesse ipotesi della definizione precedente, ovvero sia ρ : I → [0, ∞)
una funzione continua e sia ϕ : I → R2 una curva piana. Calcoliamo una semplice formula
per il modulo della derivata prima di ϕ(ϑ) nel caso in cui ρ ∈ C 1 . Per come è stata definita,
la curva ha equazioni ϕ(ϑ) = (ρ cos(ϑ), ρ sin(ϑ)). Derivando, e applicando la regola di
Leibnitz[2] otteniamo ϕ0 (ϑ) = (ρ0 cos(ϑ) − ρ sin(ϑ), ρ0 sin(ϑ) + ρ cos(ϑ)). Facciamo ora la
norma euclidea kϕ0 (ϑ)k e dopo qualche calcolo[3] si ottiene:
p
kϕ0 (ϑ)k = (ρ0 )2 + ρ2
(3.2)
Definizione 3.1.17. Dati gli intervalli I, J ∈ R, una funzione g ∈ C 1 (I, J) si dice cambiamento di parametro ammissibile (C.P.A.) se la sua derivata prima non è mai nulla[4] e
se è biiettiva.
Definizione 3.1.18. Due curve ϕ : I → Rn e ψ : J → Rn si dicono equivalenti se esiste
g ∈ C 1 (I, J) cambiamento di parametro ammissibile tale che ϕ = ψ ◦ g, ovvero
ϕ = ψ(g(t)) ∀t ∈ I
In questo caso definiremo ψ come riparametrizzazione di ϕ.
Se ϕ e ψ sono equivalenti nel senso appena detto scriveremo ϕ ∼ ψ.[5]
Definizione 3.1.19. Siano ϕ ∈ C 1 (I, Rn ) e ψ ∈ C 1 (I, Rn ) due curve equivalenti. Allora
se g 0 (t) > 0 su I diremo che le due curve sono equiorientate, se invece g 0 (t) < 0 su I le
due curve avranno orientazione opposta.[6]
3.2
Lunghezza di una curva
Definizione 3.2.1. Sia I = [a, b] con −∞ < a < b < ∞ un intervallo. Definiamo
partizione di I l’insieme
P = {ti ∈ I : i = 0, 1, . . . , N ; a = t0 < t1 < · · · < tN = b}
d
regola di q
derivazione del prodotto per cui dx
(f (x)g(x)) =
[3] kϕ0 (ϑ)k =
(ρ0 cos(ϑ) − ρ sin(ϑ))2 + (ρ0 sin(ϑ) + ρ cos(ϑ))2 .
[2] La
(ρ0
2
+ (ρ0
2
(ρ0 )2
df
(x)g(x)
dx
+
dg
(x)f (x).
dx
Svolgiamo ora i calcoli dentro la radice quadrata:
cos(ϑ) − ρ sin(ϑ))
sin(ϑ) + ρ cos(ϑ)) =
sin2 (ϑ) − 2ρρ0 sin(ϑ) cos(ϑ) + (ρ0 )2 cos2 (ϑ) + ρ2 sin2 (ϑ) +
2ρρ0 cos(ϑ) sin(ϑ). Raccogliamo ρ2 , raccogliamo (ρ0 )2 e ρρ0 . Otteniamo l’espressione ρ2 (sin2 (ϑ) + cos2 (ϑ)) + (ρ0 )2 (sin2 (ϑ) +
cos2 (ϑ)) + ρρ0 (sin(ϑ) cos(ϑ) − sin(ϑ) cos(ϑ)). Per la nota uguaglianza trigonometrica sin2 (ϑ) + cos2 (ϑ) = 1, e inoltre notiamo
che il terzo termine è nullo. Quindi scriviamo l’espressione equivalente (ρ0 )2 + ρ2 .
[4] Ovvero ∀t ∈ I si ha g 0 (t) 6= 0. Ovvero si ha g 0 (t) > 0 oppure g 0 (t) < 0.
[5] La relazione ∼ è di equivalenza.
[6] Il caso g 0 (t) = 0 non può essere per definizione di cambiamento di parametro ammissibile (vedi Definizione 3.1.17).
cos2 (ϑ) + ρ2
Matteo Gallone - Analisi Matematica II
3.2
Curve in Rn
Lunghezza di una curva
25
Definizione 3.2.2. Data una curva ϕ : I → Rn , la sua partizione P definisce una curva
poligonale P : I → Rn inscritta in ϕ tale che:
P=
ti − t
t − ti−1
ϕ(ti−1 ) +
ϕ(ti )
ti − ti−1
ti − ti−1
con t ∈ [ti−1 , ti ] ∀i = 1, . . . , N .
Definizione 3.2.3. Definiamo la lunghezza di una poligonale P che si indica con `(P):
`(P) =
N
X
kϕ(ti ) − ϕ(ti−1 )k
i=1
Definizione 3.2.4. La lunghezza di una generica curva L(ϕ) è definita come
L(ϕ) = sup{`(P)}
ove `(P) è la lunghezza della poligonale inscritta in ϕ e il sup si intende al variare di P.
Definizione 3.2.5. Una curva ϕ si dice rettificabile nel caso in cui L(ϕ) < ∞.
Esempio. (1). Si prenda curva γ(t) : [0, 1] → R2 definita come γ(t) = (r cos(2πt), r sin(2πt)) (si tratta della circonferenza
di raggio r percorsa in√
senso antiorario una volta sola). Cominciamo a costruire
delle poligonali. La prima sarà un quadrato
√
che avrà quindi lato r 2. La lunghezza di questa poligonale è `(P1 ) = 4r 2. Più in generale un poligono inscritto con 2n
lati avrà (per il teorema dei seni[7] ) lato uguale a
π
sin 2n−1
l=r
1
sin π2 1 − 2n−1
Quindi la lunghezza della poligonale sarà `(Pn ) = 2n l. Facendo tendere n all’infinito si arriva ad approssimare sempre
meglio la circonferenza e, calcolando il limite della lunghezza della poligonale si ottiene
π
sin 2n−1
π
n
= lim 2n r
L(γ) = sup{`(P)} = lim 2 r
= 2πr
n→∞
n→∞
2n−1
sin π 1 − 1
2
2n−1
(dove nel penultimo passaggio si è usato lo sviluppo in serie di Taylor al primo ordine dei due seni).
(2). (curva non rettificabile). Si prenda la curva γ(t) : [0, 1] → R2 definita come γ(t) = t, t cos πt
per t 6= 0
mentre γ(t) = (0,
0) per t = 0. Inscriviamo ora una poligonale che per i primi m elementi
prenda i massimi
locali della
1
funzione t cos 1t e poi si colleghi allo zero. Avremo quindi una suddivisione Sm = 0, m
, . . . , 12 , 1 . Notiamo inoltre
che la lunghezza di ogni pezzetto di poligonale così costruita è maggiore della lunghezza della sua proiezione sull’asse y.
Dimostriamo quindi che non esiste il sup della somma della proiezione dei pezzi di poligonali sull’asse y. Per farlo, innanzi
tutto calcoliamo esplicitamente gli estremi del k−esimo segmento della poligonale. Essi sono quei punti in cui cos πt = ±1,
1
1
, ∓ k+1
) per cui la proiezione sull’asse
ovvero πt = kπ da cui t = k1 . Quindi gli estremi del segmento saranno ( k1 , ± k1 ) e ( k+1
y risulta avere lunghezza
1
k
+
1
.
k+1
La lunghezza che cerchiamo è quella della somma di ogni singola proiezione:
Lp =
m
m
X
X
1
1
1
+
>
k
k
+
1
k
k=1
k=1
un eventuale sup dovrà essere fatto su tutti i massimi della funzione, ovvero facendo tendere m ad infinito ma
Lp =
∞
∞
X
X
1
1
1
+
>
=∞
k
k
+
1
k
k=1
k=1
quindi il sup non esiste e la curva non è rettificabile.
Definizione 3.2.6. Sia γ = (γ1 , . . . , γn ) una curva. Se le sue componenti sono localmente
integrabili allora si definisce l’integrale vettoriale di γ come il vettore
Rb
γ (t) dt
Z b
a 1
..
n
(3.3)
γ(t) dt =
∈R
.
Rb
a
γ (t) dt
a n
[7] Ovvero
in ogni triangolo indicati con a, b, c i tre lati e con α, β, γ i tre angoli opposti ad ogni lato si ha
c
.
sin γ
Matteo Gallone - Analisi Matematica II
a
sin α
=
b
sin β
=
Curve in Rn
3.2
Lunghezza di una curva
26
Figura 3.1: (1). Disegno della curva non rettificabile dell’esempio 2; (2). La poligonale con cui si dimostra
che la curva non è rettificabile è una spezzata che collega tra di loro i primi m picchi della funzione per poi
collegarsi allo 0.
Proposizione 3.2.7 (Proprietà dell’integrale vettoriale). Dati γ, ψ : [a, b] → Rn e λ, µ ∈
R, l’integrale vettoriale ha le seguenti proprietà:
Rb
Rb
Rb
i) Linearità: a (λγ + µψ) dt = λ a γ dt + µ a ψ dt;
Rb
Rb
ii) Disuguaglianza fondamentale: k a γ(t) dtk ≤ a kγ(t)k dt.
Dimostrazione. La i) discende banalmente dalla linearità dell’integrale di Riemann.
Dimostriamo la ii). Si ripartisca l’intervallo [a, b] in r parti uguali [t0 , t1 ], [t1 ,P
t2 ], . . . , [tr−1 , tr ] (ove naturalmente
t0 = a e
Pr
r
tr = b). Per
la
disuguaglianza
triangolare
(vedi
Definizione
4.1.2)
si
ha
che
k
γ(t
)(t
−t
)k
≤
kγ(t
k
k
k−1
k )(tk −
k=1
k=1
P
tk−1 )k = rk=1 kγ(tk )k(tk − tk−1 ) (quest’ultimo passaggio sfrutta la positiva omogeneità della norma; vedi Definizione
4.1.2). Passando al limite per r → ∞ si ottiene la tesi in quanto i membri estremi sono somme di Riemann dei rispettivi
integrali).
Un metodo più semplice per il calcolo della lunghezza delle curve ci è dato dal seguente
teorema:
Teorema 3.2.8 (di rettificabilità delle curve C 1 ). Sia ϕ : [a, b] → R2 una curva di classe
Rb
C 1 . Allora vale la relazione a kϕ0 (t)k dt = L(ϕ)
R
Dimostrazione. Cominciamo col provare che risulta L(P) ≤ ab |ϕ0 (t)| dt. Per ogni poligonale P inscritta nella curva ϕ è
determinata da una partizione di [a, b]. Applicando le proprietà dell’integrale vettoriale (Proposizione 3.2.7), risulta che
R ti
R
P
PN R ti
P
L(P) = N
ϕ0 (t) dt| ≤ N
|ϕ0 (t)| dt = ab |ϕ0 (t)| dt.
i=1 |ϕ(ti ) − ϕ(ti−1 )| =
i=1 | t
i=1 t
i−1
i−1
Viceversa, essendo ϕ0 uniformemente continua in [a, b], per il teorema di Cantor (Teorema 5.1.4), fissato ε > 0 esiste
δ > 0 tale che s, t ∈ [a, b], |t − s| < δ ⇒ |ϕ0 (t) − ϕ0 (s)| < ε. Consideriamo quindi una partizione di [a, b] in intervalli di
lunghezza minore di δ. E sia P la poligonale individuata da tale partizione. Fissato l’intervallo [ti−1 , ti ] per ogni s ∈ [ti−1 , ti ]
R
R
R
si ha: ϕ(ti ) − ϕ(ti−1 ) = tti ϕ0 (t) dt = tti [ϕ0 (t) − ϕ0 (s) + ϕ0 (s)] dt = tti [ϕ0 (t) − ϕ0 (s)] dt + ϕ0 (s) (ti − ti−1 ). Da
i−1
i−1
i−1
0
0
cui,
R passando ai moduli e tenendo conto della continuità uniforme di ϕ (t) si ha |ϕ (s)|(ti − ti−1 ) ≤ |ϕ(ti ) − ϕ(ti−1 )| +
ti
|ϕ(ti )−ϕ(ti −1)|
0
0
0
+ ε. Integrando la
ti−1 [ϕ (t) − ϕ (s)] dt ≤ |ϕ(ti ) − ϕ(ti−1 )| + ε(ti − ti−1 ). Si ottiene quindi ϕ (s) ≤
ti −ti−1
R ti
precedente disuguaglianza per s ∈ [ti−1 , ti ] si ottiene: t
|ϕ0 (s)| ds ≤ |ϕ(ti ) − ϕ(ti−1 )| + ε(ti − ti−1 ). Sommando per
i−1
R
i = 1, 2, . . . , N si ottiene ab |ϕ0 (s)| ds ≤ L(ϕ) + ε(b − a). Facendo quindi tendere ε a 0 si ottiene la tesi.
Esempio. (1). Sia y = f (x) ove f : [a, b] → R2 è una funzione di classe C 1 e sia ϕ : [a, b] → R2 la curva di componenti
R p
(t, f (t)) ha come lunghezza L = ab 1 + (f 0 (x))2 dx. (2). Se l’equazione di una curva ϕ : [ϑ0 , ϑ1 ] → R2 in coordinate
R p
polari è ρ = ρ(ϑ) con ρ(ϑ) di classe C 1 , la lunghezza della curva è L = ϑϑ1 (ρ(ϑ))2 + (ρ0 (ϑ))2 dϑ. (3). Si prenda la curva
0
γ(t) : [0, 1] → R2 definita
come γ(t) = (r cos(2πt), r sin(2πt)) e calcoliamo γ 0 (t) = (−2πr sin(t), 2πr cos(t)), facciamone il
p
R
R
modulo kγ 0 (t)k = 4π 2 r2 cos2 (t) + 4π 2 r2 sin2 (t) = 2πr. Calcoliamo ora l’integrale L(γ) = 01 kγ 0 (t)k dt = 01 2πr dt =
2πr. Notiamo che è lo stesso risultato ottenuto con la definizione di lunghezza data in precedenza.
Si ritiene opportuno precisare che, per come è stata definita la lunghezza di una curva,
questa non sempre coincide con la lunghezza del suo sostegno. Infatti se uno stesso sosteMatteo Gallone - Analisi Matematica II
3.3
Curve in Rn
Ascissa curvilinea e integrale curvilineo
27
gno viene percorso diverse volte anche la lunghezza della curva sarà aumentata rispetto
a quella del sostegno.
3.3
Ascissa curvilinea e integrale curvilineo
Sia ϕ : [a, b] → Rn con n ≥ 1 una curva C 1 ([a, b]) regolare tale che kϕ0 k 6= 0. Voglio
cercare una riparametrizzazione γ ∈ C 1 ([a, b]) di ϕ tale che kγ 0 (s)k = 1 per ogni s ∈ [0, L]
e g : [a, b] → [0, L].
Per il Teorema 3.2.8 abbiamo che ∀s1 , s2 ∈ [0, L] con s1 < s2 la lunghezza della curva
Rb
Rs
L(γ|[s1 ,s2 ] ) = s12 kγ 0 (s)k ds = s2 − s1 . Scegliamo quindi L = a kγ 0 (t)k dt e definiamo
Z t
kγ 0 (τ )k dτ
g : [a, b] → [0, L] : g(t) =
a
Definita la g in questo modo essa risulta avere le seguenti proprietà:
• 0 < kϕ0 (t)k = γ 0 (t) per ogni t ∈ [a, b], e, in particolare g ∈ C 1 ([a, b]);
• g è iniettiva e suriettiva, ovvero biiettiva.
Pertanto g così definita risulta essere un cambiamento ammissibile di parametro. Inoltre
esiste f = g −1 : [0, L] → [a, b] e f ∈ C 1 ([0, L]), in altri termini
f 0 (s) =
1
1
=
g 0 (f (s))
kϕ0 (f (s))k
per ogni s ∈ [0, L]. Definiamo quindi γ : [0, L] → Rn con γ ∈ C 1 ([0, L]) e γ(s) = ϕ(f (s))
riparametrizzazione di ϕ, ricordando che
γ 0 (s) = ϕ0 (f (s))f 0 (s) =
ϕ0 (f (s))
kϕ0 (f (s))k
Definizione 3.3.1. Data la curva γ : C 1 ([a, b], Rn ) e il suo sostegno Γ = γ([a, b]) e
f : Γ → R funzione continua tale che t → f (γ(t)) con t ∈ [a, b] e f (γ(t)) ∈ R, definiamo
integrale curvilineo l’integrale di Riemann
Z b
Z
f (s) ds =
f (γ(t))kγ 0 (t)k dt
γ
a
Prima di vedere le proprietà dell’integrale curvilineo serve introdurre le nozioni di curva
continua a tratti e concatenazione di curve.
Definizione 3.3.2. Una curva ϕ : [a, b] → R continua è di classe C 1 a tratti se esiste una
partizione P di [a, b], P = {a = t0 < t1 < · · · < tn = b} tale che ϕ ∈ C 1 ([ti−1 , ti ]) per
qualsiasi valore di i.
Osservazione 3.3.3. Nel caso in cui una curva sia di classe C 1 a tratti allora risulta
rettificabile ed è possibile calcolarne l’integrale curvilineo.
Definizione 3.3.4. Date due curve γ1 : [a1 , b1 ] → Rn e γ2 : [a2 , b2 ] → Rn tali che γ1 (b1 ) =
γ2 (a2 ). Definiamo la somma o concatenazione la curva γ1 + γ2 : [a1 , b1 + b2 − a2 ] → Rn la
curva:
γ1 (t)
t ∈ [a1 , b1 ]
(γ1 + γ2 )(t) =
γ2 (t − b1 + a2 ) t ∈ [a1 , b1 + b2 − a2 ]
Proposizione 3.3.5 (Proprietà dell’integrale curvilineo). L’integrale curvilineo gode delle
seguenti proprietà:
i) La definizione dell’integrale non dipende dalla parametrizzazione della curva;
Matteo Gallone - Analisi Matematica II
28
Curve in Rn
3.3
Ascissa curvilinea e integrale curvilineo
ii) Se f, g : Γ R→ R sono funzioni continue
della curva γ), α, β ∈ R
R (con Γ sostegno
R
allora vale γ (αf (s) + βg(s)) ds = α γ f (s) ds + β γ g(s) ds;
R
iii) Con le stesse ipotesi dei punti precedenti risulta: f (s) ≤ g(s) su Γ allora γ f (s) ds ≤
R
g(s) ds;
γ
iv) Se γ1 e γ2 sono funzioni continue a tratti e f : Γ1 ∪ Γ2 → R continua con Γi =
γi (ai , bi ).
Dimostrazione. i) Suppongo che γ(t) = ψ(g(t)) con le seguenti ipotesi: t ∈ [a, b]; g(t) : [a, b] → [c, d]; g ∈ C 1 e
cambiamento ammissibile di parametro; ψ : [c, d] → Rn e γ ∼ ψ. Per la definizione di integrale curvilineo allora
R
R
f (s) ds = cd f (ψ(s))kψ 0 (s)k ds. Applico la sostituzione s = g(t), ovvero ds = g 0 (t) dt. L’integrale appena scritto diventa
R
Rψb
f (ψ(g(t)))kψ 0 (g(t))kg 0 (t) dt. Ora abbiamo due casi: g 0 (t) > 0 e g 0 (t) < 0. Nel primo caso si ha ab f (ψ(g(t)))kψ 0 (g(t))kg 0 (t) dt =
Rb
Rab
R
R
b
0
0 (t)k dt =
0
0
a f (ψ(g(t)))kψ (g(t))g
γ f (s) ds. Nel secondo caso si ha a f (ψ(g(t)))kψ (g(t))kg (t) dt = a f (ψ(g(t)))k −
R
ψ 0 (g(t))g 0 (t)k dt = γ f (s) ds. La dimostrazione è terminata.
La ii) e la iii) discendono dalla liearità e dalla monotonia dell’integrale di Riemann, mentre la iv) discende dalla
proprietà di decomposizione del dominio dell’integrale di Riemann.
Matteo Gallone - Analisi Matematica II
CAPITOLO
4
Spazi metrici e normati
4.1
Definizioni ed esempi
Definizione 4.1.1. Uno spazio metrico è una coppia (X, d) dove X è un insieme e d :
X × X → [0, ∞) è una funzione detta metrica o distanza, che per ogni (x, y) ∈ X × X
verifica le seguenti proprietà:
1. d(x, y) ≥ 0 e d(x, y) = 0 se e solo se x = y;
2. d(x, y) = d(y, x) (simmetria);
3. d(x, y) ≤ d(x, z) + d(z, y) (disuguaglianza triangolare).
Definizione 4.1.2. Uno spazio normato (reale) è una coppia (V, k · k) dove V è uno
spazio vettoriale reale e k · k : V → [0, ∞) è una funzione, detta norma, che per ogni
(x, y) ∈ V × V e per ogni λ ∈ R verifica le seguenti proprietà:
1. kxk ≥ 0 e kxk = 0 se e solo se x = 0;
2. kλxk = |λ|kxk (omogeneità);
3. kx + yk ≤ kxk + kyk (subadditività o disuguaglianza triangolare).
Fissato un raggio r ≥ 0 e x ∈ X l’insieme B(x, r) = {y ∈ X : d(x, y) < r} si dice palla
(aperta) di centro x e raggio r. Utilizzando le palle aperte saremo in grado di definire
una topologia su uno spazio metrico.
Una norma k · k su uno spazio vettoriale V induce canonicamente una distanza d su V
definita nel seguente modo
d(x, y) = kx − yk,
x, y ∈ V
(4.1)
La disuguaglianza triangolare per la distanza d deriva dalla subadittività della norma k·k.
Infatti, per ogni x, y ∈ V si ha:
d(x, y) = kx − yk = kx − z + z − yk ≤ kx − zk − kz − yk = d(x, z) + d(z, y)
Esempio. Lo spazio metrico euclideo. La funzione | · | : Rn → [0, ∞), n ≥ 1 così definita
!1/2
n
X
|x| =
x2i
, x = (x1 , . . . , xn ) ∈ Rn
(4.2)
i=1
è una norma su Rn , detta norma euclidea. Lo spazio metrico corrispondente (Rn , d), dove d(x, y) = |x − y|, si dice spazio
metrico Euclideo. L’insieme B(x, r) = {y ∈ Rn : |x − y| < r} è la palla euclidea di raggio r ≥ 0 centrata in x ∈ Rn . Con
n
la notazione hx, yi = x1 y1 + x2 y2 + · · · + xn yn si indica
p il prodotto scalare standard di R . Introdotta questa notazione
possiamo esprimere la norma euclidea nel modo: |x| = hx, xi.
La verifica delle proprietà 1) e 2) per la norma euclidea è elementare. Per verificare la subadditività occorre la
disuguaglianza di Cauchy-Schwarz.
Matteo Gallone - Analisi Matematica II
Spazi metrici e normati
4.3
Successioni in uno spazio metrico
30
Proposizione 4.1.3 (Disuguaglianza di Cauchy-Schwarz). Per ogni x, y ∈ Rn vale la
disuguaglianza
|hx, yi| ≤ |x||y|
(4.3)
Dimostrazione. Il polinomio reale nella variabile t ∈ R, P (t) = |x + ty|2 = |x|2 + 2thx, yi + t2 |y|2 non è mai negativo, ovvero
P (t) ≥ 0 per ogni t ∈ R. Dunque il suo discriminante ∆ ≤ 0, e quindi 4hx, yi2 − 4|x|2 |y|2 ≤ 0, ovvero, dividendo per quattro
ambedue i membri e portando il secondo addendo del primo membro a destra si ottiene hx, yi2 ≤ |x|2 |y|2 . Estraendo le
radici quadrate si ottiene la tesi.
Esempio. Possiamo ora dimostrare la subadditività della norma euclidea. Dobbiamo dimostrare che |x + y| ≤ |x| + |y|.
Consideriamo solo il primo membro ed eleviamolo al quadrato: |x + y|2 = |x|2 + hx, yi + |y|2 . Per la disuguaglianza di
Cauchy-Schwarz (Proposizione 4.1.3) si ha che hx, yi ≤ |x||y|, quindi |x|2 + hx, yi + |y|2 ≤ |x|2 + 2|x||y| + |y|2 = (|x| + |y|)2 .
Abbiamo appena dimostrato che |x + y|2 ≤ (|x| + |y|)2 . Estraendo le radici quadrate abbiamo dimostrato la subadditività
della norma euclidea.
Esempio. Norma della convergenza uniforme. Consideriamo l’insieme V = C([0, 1]; Rn ) delle funzioni continue a
valori in Rn , n ≥ 1, definite su un intervallo [0, 1] ⊂ R. Queste sono funzioni con n componenti f = (f1 , f2 , . . . , fn )
e ciascuna componente è una funzione continua a valori reali. L’insieme V è uno spazio vettoriale reale. La funzione
k · k∞ : V → [0, ∞) definita come
kf k∞ = sup |f (x)| = max |f (x)|
(4.4)
x∈[0,1]
x∈[0,1]
è detta norma della convergenza uniforme o norma del sup. L’estremo superiore è il massimo per il teorema di Weierstrass[1] . Le proprietà 1) e 2) sono di facile verifica. Verifichiamo la disuguaglianza triangolare per f, g ∈ V : kf + gk∞ =
supx∈[0,1] |f (x) + g(x)| ≤ supx∈[0,1] (|f (x)| + g|(x)|) perchè la norma euclidea soddisfa la disuguaglianza triangolare. Inoltre
si ha anche supx∈[0,1] (|f (x)| + g|(x)|) ≤ supx∈[0,1] |f (x)| + supx∈[0,1] g|(x)| = kf k∞ + kgk∞ . la disuguaglianza triangolare
è quindi verificata.
Esempio. Norma integrale. Consideriamo l’insieme V = C([0, 1]) delle funzioni continue a valori reali definite sull’intervallo [0, 1] ∈ R. La funzione k · k1 : V → [0, ∞)
1
Z
kf k1 =
|f (x)| dx
(4.5)
0
è la norma della convergenza L1 ([0, 1]). Le proprietà 1) e 2) si verificano in modo banale. Verifichiamo la subadittività per
k · k1 . Date f, g ∈ V si ha
1
Z
kf + gk =
1
Z
|f (x) + g(x)| dx ≤
0
Z
(|f (x)| + |g(x)|) dx =
0
1
1
Z
|f (x)| dx +
0
|g(x)| dx
0
La disuguaglianza è dovuta alla proprietà del modulo[2] e la successiva uguaglianza è legata alla linearità dell’integrale.
Quindi si è dimostrato che kf + gk1 ≤ kf k1 + kgk1 .
4.2
Successioni in uno spazio metrico
Una successione in uno spazio metrico (X, d) è una funzione x : N → X. Si usa la seguente
notazione xn = x(n) per ogni n ∈ N e la successione si indica con (xn )n∈N .
Definizione 4.2.1. Una successione (xn )n∈N converge ad un punto x ∈ X nello spazio
metrico (X, d) se
lim d(xn , x) = 0 ovvero ∀ε > 0, ∃n̄ ∈ N, ∀n ≥ n̄ : d(xn , x) ≤ ε
x→∞
(4.6)
In questo caso si scrive anche xn → x per n → ∞ in (X, d) oppure anche limn→∞ xn = x,
e si dice che la successione è convergente, ovvero che x è il limite della successione.
Proposizione 4.2.2. Se il limite di una successione esiste allora è unico.
Dimostrazione. Prendiamo infatti x, y ∈ X e supponiamo che siano entrambi limiti di (xn )n∈N , allora risulta per la
disuguaglianza triangolare d(x, y) ≤ d(x, xn ) + d(y, xn ). Per definizione inoltre d(x, y) ≥ 0, quindi 0 ≤ d(x, y) ≤ d(x, xn ) +
d(y, xn ). Ma per x → ∞ l’ultimo termine dell’uguaglianza tende a 0, quindi per il teorema dei carabinieri anche d(x, y) = 0.
Ma ciò implica proprio che x = y.
[1] Sia f : [a, b] → R una funzione continua e sia [a, b] un compatto. Allora f (x) assume massimo e minimo nell’intervallo
[a, b].
[2] |a + b| ≤ |a| + |b|.
Matteo Gallone - Analisi Matematica II
4.3
4.3
Spazi metrici e normati
Funzioni continue tra spazi metrici
31
Funzioni continue tra spazi metrici
Definizione 4.3.1. Siano (X, dX ) e (Y, dY ) due spazi metrici e sia x0 ∈ X. Una funzione
f : X → Y si dice continua nel punto x0 ∈ X se per ogni ε > 0 esiste δ > 0 tale che per
ogni x ∈ X vale
d(x, x0 ) < δ ⇒ d(f (x), f (x0 )) < ε
La funzione si dice continua se è continua in tutti i punti di X.
Definizione 4.3.2. Data una funzione f : X → Y e un punto x0 ∈ X, f è sequenzialmente
continua in x0 se per ogni successione (xn )n∈N ∈ X allora lim xn = x0 ∈ X ⇒ lim f (xn ) =
f (x) ∈ Y .
Teorema 4.3.3. Negli spazi metrici la continuità è equivalente alla continuità sequenziale.
Dimostrazione. Sia f : X → Y una funzione e sia x0 il punto di cui vogliamo studiare la continuità. Siano inoltre (X, dX )
e (Y, dY ) due spazi metrici.
Dimostriamo che la continuità implica la continuità sequenziale. Fissato ε > 0, poichè f è continua allora esiste δ > 0
tale che per ogni x ∈ X vale dX (x, x0 ) < δ ⇒ dY (f (x), f (x0 )) < ε. Dalla convergenza della successione segue l’esistenza di
n̄ ∈ N tale che per n ≥ n̄ si ha dX (xn , x0 ) < δ. Quindi per tali n ≥ n̄ deve essere dY (f (xn ), f (x0 )) < ε. Il che è esattamente
come dire che f è sequenzialmente continua.
Dimostriamo che la continuità sequenziale implica la continuità. Supponiamo per assurdo che f non sia continua in x0 ∈
1
X. Allora esiste ε > 0 tale che per ogni n ∈ N esistono dei punti xn ∈ X tali che dX (xn , x0 ) < n
ma dY (f (xn ), f (x0 )) ≥ ε.
Poichè f è sequenzialmente continua allora una qualsiasi successione (xn )n∈N che ha limite lim xn = x0 dovrebbe implicare il
fatto che lim f (xn ) = f (x0 ). Ma ciò è esattamente come dire che per n → ∞ si ha dY (f (xn ), f (x0 )) < ε. Il che contraddice
l’ipotesi che la funzione possa essere non continua.
Per funzioni f : X → R a valori reali si possono definire in modo naturale le operazioni di somma, moltiplicazione e reciproco. Queste funzioni ereditano la continuità delle
funzioni da cui sono composte.
Teorema 4.3.4. Sia (X, dX ) uno spazio metrico e sia R munito della distanza Euclidea.
Siano f, g : X → R funzioni continue in un punto x0 ∈ X allora:
1. La funzione somma f + g : X → R è continua nel punto x0 ;
2. La funzione prodotto f · g : X → R è continua nel punto x0 ;
3. Se f 6= 0 su X, allora la funzione reciproca 1/f : X → R è continua in x0 .
Dimostrazione. La dimostrazione discende dalle analoghe proprietà dei limiti. Infatti dimostriamo la 1). Per ipotesi
esistono finiti i limiti limx→x0 f (x) = f (x0 ) e limx→x0 g(x) = g(x0 ). Allora esiste finito il limite limx→x0 (f (x) + g(x)) =
limx→x0 f (x) + limx→x0 g(x) = f (x0 ) + g(x0 ). Ma questo è esattamente come dire che la funzione somma è continua.
Dimostriamo la 2). Sempre per ipotesi esistono i limiti di prima. Quindi esiste finito il limite limx→x0 (f (x) · g(x)) =
limx→x0 f (x) limx→x0 g(x) = f (x0 )g(x0 ). Quindi anche il prodotto di funzioni continue è una funzione continua.
1
1
La 3) è vera perché se limx→x0 f (x) = f (x0 ) 6= 0 allora limx→x0 f (x)
= f (x
.
)
0
Inoltriamoci ora sul caso multidimensionale, nel caso in cui X = Rn e Y = Rm con
n, m ≥ 1, entrambi muniti della rispettiva distanza euclidea.
Più precisamente, dato un insieme A ⊂ Rn consideriamo lo spazio metrico (A, d) dove
d è la distanza Euclidea su A ereditata dallo spazio ambiente.
Teorema 4.3.5. Sia f : A → Rm una funzione f = (f1 , . . . , fm ), e sia x0 ∈ A ⊂ Rm un
punto fissato. Sono equivalenti:
A) f è continua in x0 ;
B) le funzioni coordinate f1 , . . . , fm : A → R sono continue in x0 .
Dimostrazione. Dimostriamo l’implicazione A) ⇒ B). Poichè f è continua allora se |x − x0 | < δ esiste un ε > 0 tale che
|f (x) − f (x0 )| < ε. Poichè però f (x) = |f1 (x) + f2 (x) + · · · + fm (x)| allora si deve avere, per ogni i = 1, . . . , m e per ogni
x ∈ A, che |fi (x) − fi (x0 )| ≤ |f (x) − f (x0 )| < ε. Che è esattamente come dire che ogni fi è continua.
L’implicazione B) ⇒ A) si verifica così. Fissato ε > 0, per ogni i = 1, . . . , m esiste δi > 0 tale che |x − x0 | < √
δi ⇒
|fi (x) − fi (x0 )| < ε. Con la scelta δ = min{δ1 , . . . , δm } vale allora l’implicazione |x − x0 | < δ ⇒ |f (x) − f (x0 )| < mε.
Che è come dire che la f è continua in x0 .
Matteo Gallone - Analisi Matematica II
Spazi metrici e normati
4.4
Spazi metrici completi
32
Esercizio 4.1. Al variare di α, β ∈ R≥0 studiare la continuità in (0, 0) ∈ R2 della seguente
funzione f : R2 → R
( α β
|x| |y|
(x, y) 6= (0, 0)
x2 +y 2
f (x, y) =
0
(x, y) = (0, 0)
Soluzione. Restringo la funzione sulle rette y = mx (con m ∈ R, parametro) per vedere dove il limite non esiste.[3]
Quindi chiamo la funzione ristretta ϕ(x) = f (x, mx) =
|m|β
|x|α |mx|β
x2 +m2 x2
=
|x|α+β |m|β
x2 (1+m2 )
|m|β
limx→0 |x|α+β−2 . Perchè la
1+m2
|x|α+β−2 = 0. Ma questo è vero solo
limite limx→0 ϕ(x) = limx→0 |x|α+β−2 1+m2 =
β
m
= |x|α+β−2 1+m
2 . Calcoliamo ora il
nostra funzione sia continua serve che il
limx→0 ϕ(x) = 0, ovvero che il limite limx→0
se α + β > 2.
Tuttavia finora abbiamo dimostrato solo che se α + β ≤ 2 allora il limite non esiste. Per dimostrare che il limite esiste
si rimanda al prossimo capitolo.
Esercizio 4.2. Dimostrare che in (0, 0) la funzione
x2 y
(x, y) 6= (0, 0)
x4 +y 2
f (x, y) =
0
(x, y) = (0, 0)
non è continua.
Soluzione. Restringo la funzione alle curve del tipo y = ax2 . La funzione ristretta a tali curve è ϕ(x) = f (x, mx2 ) =
x2 ax2
x4 +a2 x4
=
m
.
1+m2
Il limite per x → 0 di questa funzione dipende palesemente dalla scelta di m, quindi f non è continua
in (0, 0).
Osservazione 4.3.6. La funzione dello scorso esercizio è un esempio di funzione con
queste proprietà:
i) x → f (x, y) è continua in x per y fissata;
ii) y → f (x, y) è continua in y per x fissato;
iii) (x, y) → f (x, y) non è continua.
4.4
Spazi metrici completi
Definizione 4.4.1. Una successione (xn )n∈N in uno spazio metrico (X, d) si dice successione di Cauchy se per ogni ε > 0 esiste n̄ ∈ N tale che per
d(xn , xm ) ≤ ε
(4.7)
a patto di scegliere m, n ≥ n̄ con n̄ ∈ N sufficientemente grandi.
Gli spazi metrici in cui tutte le successioni di Cauchy sono convergenti hanno proprietà
particolari.
Definizione 4.4.2. Uno spazio metrico (X, d) si dice completo se ogni successione di
Cauchy in (X, d) è convergente ad un elemento di X.
Definizione 4.4.3. Uno spazio di Banach (reale) è uno spazio normato (reale) (V, k · k)
che è completo rispetto alla metrica indotta dalla norma.
Teorema 4.4.4. I numeri reali R con la distanza euclidea formano uno spazio metrico
completo.
Dimostrazione. Sia (xn )n∈N una successione di Cauchy in R. Proviamo preliminarmente che la successione è limitata.
Infatti, scelto ε = 1 esiste n̄ ∈ N tale che |xn − xm | < 1 per m, n ≥ n̄, e in particolare per n ≥ n̄ si ha[4] |xn | ≤
|xn̄ | + |xn − xn̄ | ≤ 1 + |xn̄ |. Dunque per n ∈ N si ha la maggiorazione: |xn | ≤ max{|x1 |, . . . , |xn̄−1 |, 1 + |xn̄ |}. Per il teorema
[3] Per dimostrare dove non esiste il limite, si usa restringere la funzione ad una famiglia di curve. Si utilizza poi la
seguente Proposizione (Limiti e limiti di restrizioni) Siano E ⊂ A ⊂ Rn , f : A → Rm una funzione e x ∈ Rn un punto
di accumulazione per E (dunque anche per A). Se esiste limx→p f (x) allora esiste, ed è uguale limx→p (f |E )(x). Per cui
se il limite di due restrizioni è diverso allora il limite non esiste.
[4] Si ponga x
m = xn̄ .
Matteo Gallone - Analisi Matematica II
4.5
Spazi metrici e normati
Convergenza puntuale e uniforme
33
di Bolzano-Weierstrass[5] compatto , dalla successione limitata (xn )n∈N si può estrarre una sottosuccessione convergente
(xnj )j∈N . Ovvero esiste x ∈ R tale che xnj → x per j → ∞.
Proviamo che xn → x per n → ∞. Fissato ε > 0 sia n̄ ∈ N data dalla condizione di Cauchy e scegliamo j ∈ N tale che
nj ≥ n̄ e |x − xnj | < ε. Allora per n ≥ n̄ risulta |xn − x| ≤ |xn − xnj | + |xnj − x| ≤ 2ε.
Esempio. I numeri razionali Q ⊂ R con la distanza euclidea non sono uno spazio metrico completo. Infatti la successione
1 n
∈ Q, n ∈ N, è di Cauchy, in quanto converge (in R) al numero e ∈ Q̃, e il limite non è in Q.
xn = 1 + n
Esempio. Lo spazio k-dimensionale Rk , k ∈ N, con la norma euclidea è uno spazio di Banach. Infatti se (xn )n∈N è una
successione di Cauchy in Rk , allora indicando con xin la coordinata i-esima di xn , i = 1, . . . , k, la successione (xin )n∈N a
valori reali è di Cauchy in R e dunque converge xin → xi ∈ R. Posto x = (x1 , . . . , xk ) ∈ Rk , da questo segue che xn → x in
1
P
k
i
i 2 2 = 0.
Rk : limn→∞ |xn − x| = limn→∞
i=1 (xn − x )
Esempio. Lo spazio X = C([0, 1]) con la distanza data dalla norma integrale d(f, g) =
Per n ∈ N sia fn ∈ C([0, 1]) la funzione così definita
x ∈ [0, 1/2]
0
n(x − 1/2) x ∈ [1/2, 1/2 + 1/n]
fn (x) =
1
x ∈ [1/2 + 1/n, 1]
R1
0
La successione (fn )n∈N è di Cauchy. Infatti, dati m, n ∈ N con m ≥ n risulta d(fm , fn ) =
2
.
n
|f (x) − g(x)| dx non è completo.
R1
0
|fn − fm | dx ≤
R
1+ 1
2
n
1
2
(|fn | +
|fm |) dx ≤
La candidata funzione limite è la f (x) così definita
x ∈ [0, 1/2]
x ∈ (1/2, 1]
R
In effetti, la funzione f è Riemann-integrabile su [0, 1] e risulta limn→∞ 01 |(fn (x) − f (x)| dx = 0. La funzione f non è in
C([0, 1]) perchè ha un punto di discontinuità. Dunque la successione (fn )n∈N non converge ad un elemento di X = C([0, 1]).
f (x) =
0
1
Teorema 4.4.5. Lo spazio X = C([0, 1]; Rk ),k ≥ 1, con la norma della convergenza
uniforme:
kf k∞ = sup |f (x)|
x∈[0,1]
è uno spazio di Banach.
Dimostrazione. Sia (fn )n∈N una successione di Cauchy in X. Per ogni x ∈ [0, 1] fissato, la successione (fn (x))n∈N è una
successione di Cauchy in Rk e quindi è convergente. Esiste quindi il limite di questa successione, ovvero un punto che
chiamiamo f (x) ∈ Rk tale che fn (x) → f (x) per n → ∞. Risulta definita una funzione f : [0, 1] → Rk tale che per ogni
x ∈ [0, 1] allora lim fn (x) = f (x).
Dobbiamo quindi provare che f sia limite di fn , ovvero che lim kfn − f k∞ = 0. Per ogni ε > 0 fissato, esiste n̄ ∈ N tale
che per ogni x ∈ [0, 1] vale |fn (x) − fm (x)| < ε (per m, n ≥ n̄) poichè fn è una successione di Cauchy. Facendo tendere
m → ∞ e usando la convergenza fm (x) → f (x) si ottiene, per ogni x ∈ [0, 1] |fn (x) − f (x)| < ε. Ma il che è esattamente
come dire che f (x) è limite di fn (x).
Rimane da dimostrare che f ∈ X, ovvero che f : [0, 1] → Rk è continua. Verifichiamolo in un generico punto x0 ∈ [0, 1].
Fissato ε > 0 scegliamo un n ≥ n̄ a nostro piacere. Siccome la funzione fn è continua in x0 allora esiste un δ > 0 tale che
per ogni x ∈ [0, 1] si ha |x − x0 | < δ ⇒ |fn (x) − fn (x0 )| < ε. Dunque, per |x − x0 | < δ si ottiene, per la disuguaglianza
triangolare, |f (x) − f (x0 )| ≤ |f (x) − fn (x)| + |fn (x) − fn (x0 )| + |fn (x0 ) + f (x0 )| ≤ 3ε. Si è così provata la continuità di f ,
e di conseguenza la sua appartenenza a X. X è uno spazio di Banach.
4.5
Convergenza puntuale e uniforme
Per le definizioni seguenti siano A ∈ Rk un insieme e f, fn : A → R (con n ∈ N), funzioni.
Definizione 4.5.1. Diciamo che la successione (fn )n∈N converge puntualmente ad f su
A se per ogni x ∈ A risulta
lim |fn (x) − f (x)| = 0
(4.8)
n→∞
Definizione 4.5.2. Diciamo che la successione (fn )n∈N converge uniformemente ad f su
A se per ogni x ∈ A risulta
lim sup |fn (x) − f (x)| = 0
n→∞ x∈A
(4.9)
[5] In uno spazio euclideo di dimensione finita (Rn ) ogni successione limitata ammette almeno una sottosuccessione
convergente.
Matteo Gallone - Analisi Matematica II
Spazi metrici e normati
4.6
Teorema delle contrazioni di Banach
34
La convergenza uniforme implica la convergenza puntuale ma il viceversa è falso.
Esempio. Sia fn : [0, 1] → R, n ∈ N la funzione fn (x) = xn . Per x ∈ [0, 1] si ha il limite puntuale limn→∞ fn (x) = f (x) =
0 se 0 ≤ x < 1
. D’altra parte la convergenza non è uniforme in quanto, per ogni n ∈ N si ha supx∈[0,1] |fn (x)−f (x)| =
1 se x = 1
supx∈[0,1] |fn (x)| = 1. Questo perchè, definita f (x) come sopra, si ha che il supx∈A |fn (x)−f (x)| è il limx→1 (fn (x)−f (x)) =
limx→1 (fn (x)) − limx→1 (f (x)). Il primo limite vale 1 e il secondo vale 0. Quindi abbiamo che supx∈A |fn (x) − f (x)| = 1.
Da cui è semplice dedurre che limn→∞ |fn (x) − f (x)| = limn→∞ 1 = 1 6= 0. Non si ha quindi la convergenza uniforme.
2
Esercizio 4.3. Sia fn : [−1, 1] → R, n ∈ N la funzione fn (x) = e−nx . Dire se la serie
converge puntualmente e uniformemente.
Soluzione. La funzione candidata limite è ovviamente la δ(x) =
0
1
x 6= 0
. Per provare che c’è convergenza puntuale
x=0
2
si calcoli il limite limn→∞ |fn (x) − f (x)| = limn→∞ |e−nx − f (x)| = 0. Quindi cè convergenza puntuale.
Per vedere se c’è convergenza uniforme bisogna controllare che limn→∞ supx∈[−1,1] |fn (x) − f (x)| = 0, che equivale a
chiedere che se x0 è l’ascissa di un punto di estremo allora si ha fn (x0 ) → lim x → x0 f (x). Si calcola quindi la derivata
2
2
prima fn0 (x) = −2nxe−nx , si calcoli quali sono gli estremanti, ovvero fn0 (x) = 0, −2nxe−nx = 0 che equivale a x = 0.
2
Vediamo dunque cosa succede per x = 0. Si ha limn→∞ e−n(0) = 1 6= 0. Quindi non c’è convergenza uniforme.
Esercizio 4.4. Sia fn : (−∞, +∞) → R, n ∈ N la funzione
fn (x) =
(n + 1)x + n2 x3
1 + n2 x2
dire se c’è convergenza puntuale e/o uniforme.
Soluzione. C’è convergenza puntualmente alla funzione f (x) = x. Cerchiamo ora su quali intervalli la successione converge
uniformemente. Dobbiamo vedere quale sia quindi il limn→∞ supx∈R kfn (x) − f (x)k = limn→∞ supx∈R k
Detto questo, facciamo la derivata prima di
1
)
fn ( n
1
f( n
)
d
(f
dx n
− f) =
3 2
n−n x
1+n2 x2
che si annulla per x =
1
1± n
2
1
±n
.
(n+1)x+n2 x3
1+n2 x2
− xk.
Sostituendo questo valore
−
=
. Se facciamo il limite di questa quantità per n → ∞ otteniamo
in fn − f si ottiene
successione convergerà uniformemente in intervalli del tipo (−∞, −ε) e (ε, ∞).
1
2
6= 0, quindi la
Teorema 4.5.3 (dello scambio dei limiti). Siano A ⊂ Rk , k ≥ 1, fn ∈ C(A, R) funzioni
continue ed f : A → R. Se fn → f per n → ∞ uniformemente su A allora f ∈ C(A, R)
e, per ogni x0 ∈ A vale il teorema sullo scambio dei limiti:
lim lim fn (x) = lim lim fn (x)
n→∞ x→x0
4.6
x→x0 n→∞
(4.10)
Teorema delle contrazioni di Banach
Definizione 4.6.1. Sia X un insieme e sia T : X → X una funzione da X in sè stesso.
Siamo interessati all’esistenza di soluzioni x ∈ X dell’equazione T (x) = x. Un simile
elemento x ∈ X si dice punto fisso di T .
Definizione 4.6.2. Sia (X, d) uno spazio metrico. Un’applicazione T : X → X è una
contrazione se esiste un numero 0 < λ < 1 tale che d(T (x), T (y)) ≤ λd(x, y) per ogni
x, y ∈ X.
Teorema 4.6.3 (delle contrazioni di Banach). Sia (X, d) uno spazio metrico completo e
sia T : X → X una contrazione. Allora esiste un unico punto x ∈ X tale che x = T (x).
Dimostrazione. Sia x0 ∈ X un qualsiasi punto e si definisca la successione xn = T n (x0 ) = T ◦ · · · ◦ T (x0 ), n-volte.
Proviamo che la successione (xn )n∈N è di Cauchy. Per farlo si usa la disuguaglianza triangolare per cui si ha: d(xn+k , xn ) ≤
Pk
Pk
Pk
n è definita come T n = x allora
n+h , T n+h−1 ).
, xn+h−1 ) =
n
h=1 d(xn+h , xn+h−1 ). Poichè T
h=1 d(x
h=1 d(T
Pkn+h n+h−1
P
n+h
n+h−1
n
Poichè T è una contrazione si ha inoltre che d(T
,T
) ≤ d(T (x0 ), x0 ) h=1 λ
= λ d(T (x0 ), x0 ) kh=1 λh−1 .
Pk
n
Cambiando l’estremo della sommatoria a ∞ si ottiene una quantità ancora maggiore, quindi λ d(T (x0 ), x0 ) h=1 λh−1 ≤
P
P∞
h−1 . La serie
h−1 converge[6] e λn → 0 per n → ∞ poichè λ < 1. Poichè inoltre X, per
λn d(T (x0 ), x0 ) ∞
h=1 λ
h=1 λ
definizione, è completo esiste un punto x ∈ X tale che x = limn→∞ T n (x0 ).
Proviamo ora che x = T (x). Per come è definito x si ha che x = limn→∞ T n (x0 ), inoltre per come è definito T n ,
T n = T (T n−1 (x0 )). Poichè T è continua, inoltre, si ha anche che lim T (f (x)) = T (lim f (x)). Quindi x = limn→∞ T (x) =
[6] Lo
si può facilmente verificare per confronto con la serie geometrica con q < 1.
Matteo Gallone - Analisi Matematica II
4.7
Spazi metrici e normati
Topologia di uno spazio metrico
35
x = limn→∞ (T n (x)) = T (limn→∞ T n−1 (x)) = T (x). Eguagliando il primo e l’ultimo termine abbiamo dimostrato che
x = T (x).
Dobbiamo infine dimostrare l’unicità del punto fisso. Supponiamo quindi che x0 ∈ X sia punto unito, ovvero sia
x0 = T (x0 ). Allora abbiamo d(x, x0 ) = d(T (x), T (x0 )). Ma per definizione di contrazione d(T (x), T (x0 )) ≤ λd(x, x0 ). Quindi
d(x, x0 ) ≤ λd(x, x0 ). Se d(x, x0 ) 6= 0 allora posso dividere ambedue i membri per d(x, x0 ), e ciò mi porta a dire che λ ≥ 1
che è assurdo perchè λ è per definizione λ < 1. Quindi si deve avere per forza che d(x, x0 ) = 0, ovvero che x = x0 .
4.7
Topologia di uno spazio metrico
Definizione 4.7.1. Sia (X, d) uno spazio metrico. Un insieme A ⊂ X si dice aperto se
per ogni x ∈ A esiste ε > 0 tale che B(x, ε) ⊂ A.
Definizione 4.7.2. Sia (X, d) uno spazio metrico. Un insieme C ⊂ X si dice chiuso se
X \ C è aperto.
Proposizione 4.7.3. Sia dato un generico spazio metrico (X, d); le palle B(x, r) sono
aperte ∀x ∈ X e ∀r > 0 con B(x, r) = {y ∈ X : d(x, y) < r}.
Dimostrazione. Dato un y ∈ B(x, r), ovvero tale che d(x, y) < r posso scegliere ε > 0 tale che ε + s < r, ossia ε < r − s.
Esempio. (1).
Gli insiemi ∅ e X sono contemporaneamente aperti e chiusi. (2).
In X = R con la distanza
d(x, y) = |x − y| valgono i seguenti fatti: 1) gli intervalli (a, b) con −∞ ≤ a, b ≤ ∞ sono aperti; 2) gli intervalli [a, b] con
−∞ < a < b < ∞ sono chiusi; 3) gli intervalli [a, ∞) e (−∞, b] con −∞ < a, b < ∞ sono chiusi; 4) gli intervalli (a, b] e [a, b)
con −∞ < a, b < ∞ non sono nè aperti nè chiusi. (3). In X = R2 con la distanza euclidea 1) il cerchio {x ∈ R2 : |x| < 1}
è aperto; 2) il cerchio {x ∈ R2 : |x| ≤ 1} è chiuso. (4). In uno spazio metrico generico (X, d) le palle B(x, r) con x ∈ X e
r > 0 sono aperte. Sia infatti y ∈ B(x, r, ovvero s := d(x, y) < r. Scegliamo ε > 0 tale che s + ε < r. Se z ∈ B(y, ε) allora
dalla disuguaglianza triangolare segue che d(z, x) ≤ d(z, y) + d(y, x) < ε + s < r e quindi B(y, ε) ⊂ B(x, r).
Definizione 4.7.4. Sia A ⊂ X un insieme.
• Un punto x ∈ X si dice punto interno di A se esiste ε > 0 tale che B(x, ε) ⊂ A.
• L’interno di A è l’insieme A◦ = {x ∈ X : x è un punto interno di A}.
• Un punto x ∈ X si dice punto di chiusura di A se per ogni ε > 0 risulta B(x, ε)∩A 6=
∅.
• La chiusura di A, è l’iniseme Ā = {x ∈ A : x è un punto di chiusura per A}
• La frontiera di A è l’insieme ∂A = {x ∈ X : B(x, r) ∪ A 6= ∅ e B(x, r) ∩ (X \ A) 6=
0 ∀r > 0}. In altri termini ∂A = Ā ∩ X \ A.
Proposizione 4.7.5. Siano A ⊂ X un insieme e x ∈ X. Sono equivalenti:
a) x ∈ A;
b) Esiste una successione (xn )n∈N con xn ∈ A per ogni n ∈ N tale che xn → x per
n → ∞.
Dimostrazione. Dimostriamo che a) ⇒ b). Se x ∈ A allora per ogni r > 0 risulta B(r, x) ∩ A 6= ∅. In particolare, per ogni
1
n ∈ N esiste xn ∈ A ∩ B1/n (x). La successione (xn )n∈N è contenuta in A e converge ad x in quanto d(xn , x) < n
.
Dimostriamo ora che b) ⇒ a). Proviamo che la negazione di a) implica la negazione di b). Se x ∈
/ A allora esiste ε > 0
tale che B(x, ε) ∩ A = ∅ e quindi non può esistere una successione contenuta in A e convergente a x.
Teorema 4.7.6. Sia (X, d) uno spazio metrico e sia A ⊂ X. Allora:
a) A è aperto se e solo se A = Ao ;
b) A è chiuso se e solo se A = A.
Dimostrazione. Proviamo a). Se A = Ao allora A è aperto (perchè Ao è aperto per definizione). Se invece A è aperto allora
∀x ∈ A ∃ε > 0 tale che B(x, ε) ⊂ A, ma quindi x deve essere un punto interno, e A è formato da punti interni, ed Ao è
proprio l’insieme dei punti interni di A. Quindi, per come è definito Ao si ha che A = Ao .
Proviamo ora b). Se A è chiuso allora X \ A è aperto. È sufficente provare che A ⊂ A, perchè l’inclusione A ⊂ A è
sempre verificata. Sia x ∈ A. Se per assurdo fosse x ∈ X \ A allora esisterebbe un ε > 0 tale che B(x, ε) ∩ A = ∅ e non ci
sarebbe una successione (xn )n∈N contenuta in A tale che xn → x per n → ∞. Dunque deve essere x ∈ A.
Supponiamo ora che sia A = A e proviamo che A è chiuso, ovvero che il complementare X \ A = X \ A è aperto. Sia
x ∈ X \ A un punto che non è di chiusura per A. Allora esiste ε > 0 tale che B(x, ε) ∩ A = ∅. Se così non fosse ci sarebbe
una successione in A che converge ad x. Ma allora B(x, ε) ⊂ X \ A, che dunque è aperto.
Matteo Gallone - Analisi Matematica II
Spazi metrici e normati
4.8
Spazi metrici compatti
36
Definizione 4.7.7. Sia (X, d) uno spazio metrico. La famiglia di insiemi
τ (X) = {A ⊂ X : A è aperto in X}
si dice topologia di X.
Teorema 4.7.8. La topologia di uno spazio metrico X verifica le seguenti proprietà
(A1) ∅, X ∈ τ (X);
(A2) Se A1 , A2 ∈ τ (X) allora A1 ∩ A2 ∈ τ (X);
(A3) Per ogni famiglia di indici A risulta
Aα ∈ τ (X) per ogni α ∈ A ⇒
[
Aα ∈ τ (X)
α∈A
Osservazione 4.7.9. In modo duale la famiglia dei chiusi di uno spazio metrico verifica
le seguenti proprietà:
(C1) ∅, X sono chiusi;
(C2) Se C1 , C2 sono chiusi allora C1 ∪ C2 è chiuso;
(C3) Per ogni famiglia di indici A risulta
Aα è chiuso per ogni α ∈ A ⇒
\
Aα è chiuso
α∈A
Teorema 4.7.10 (Caratterizzazione topologica della continuità). Siano (X, dX ) e (Y, dY )
due spazi metrici e sia f : X → Y una funzione. Sono equivalenti le seguenti affermazioni:
1. f è continua;
2. f −1 (A) ⊂ X è aperto in X per ogni aperto A ⊂ Y ;
3. f −1 (C) ⊂ X è chiuso in X per ogni chiuso C ⊂ Y
Dimostrazione. Proviamo l’implicazione 1) ⇒ 2). Verifichiamo che ogni punto x0 ∈ f −1 (A) è un punto interno di f −1 (A).
Siccome A è aperto e f (x0 ) ∈ A, esiste ε > 0 tale che BY (f (x0 ), ε) ⊂ A. Per la continuità di f esiste δ > 0 tale
che dX (x, x0 ) < δ implica dY (f (x), f (x0 )) < ε. In altre parole, si ha f (BX (x0 , δ)) ⊂ BY (f (x0 ), ε). Allora si conclude
che BX (x0 , δ) ⊂ f −1 (f (BX (x0 , δ)) ⊂ f −1 (BY (f (x0 ), ε)) ⊂ f −1 (A) (Notare che l’inclusione a sinistra in generale non è
un’uguaglianza.)
Proviamo ora l’implicazione 2) ⇒ 1). Controlliamo che f sia continua in un generico punto x0 ∈ X. Fissato ε > 0, l’insieme BY (f (x0 ), ε) è aperto e quindi l’antimmagine f −1 (BY (f (x0 ), ε)) è aperta. Siccome x0 ∈ f −1 (BY (f (x0 ), ε)), esiste δ > 0
tale che BX (x0 , δ) ⊂ f −1 (BY (f (x0 ), ε)), da cui, passando alle immagini, segue che f (BX (x0 , δ)) ⊂ f (f −1 (BY (f (x0 ), ε))) ⊂
BY (f (x0 ), ε). (Notare anche qui che l’ultima inclusione in generale non è un’uguaglianza). La catena di inclusioni provata
mostra che se dX (x, x0 ) < δ allora dY (f (x), f (x0 )) < ε, che è la continuità di f in x0 .
Per provare l’equivalenza 2) ⇔ 3) si usa la seguente relazione insiemistica valida per ogni B ⊂ Y : X \ f −1 (B) =
f −1 (Y \B). Verifichiamo 2) ⇒ 3). Sia C ⊂ Y chiuso. Allora A = Y \C è aperto e quindi f −1 (A) = f −1 (Y \C) = X \f −1 (C)
è aperto. Ovvero, f −1 (C) è chiuso.
Verifichiamo ora 3) ⇒ 2). Sia A ⊂ Y aperto. Allora C = Y \ A è chiuso e quindi f −1 (C) = f −1 (T \ A) = X \ f −1 (C)
è chiuso. Ovvero, f −1 (A) è aperto.
Teorema 4.7.11. Siano (X, dX ), (Y, dY ), (Z, dZ ) spazi metrici e siano f : X → Y e
g : Y → Z funzioni continue. Allora la composizione g ◦ f : X → Z è continua.
Dimostrazione. Usiamo la caratterizzazione di continuità del teorema precedente (Teorema 4.7.10), ovvero che una funzione
continua manda aperti in aperti. Se A ⊂ Z è un aperto allora g −1 (A) ⊂ Y è un aperto, e dunque (g ◦ f )−1 (A) =
f −1 (g −1 (A)) ⊂ X è un aperto. Quindi la funzione g ◦ f è continua.
4.8
Spazi metrici compatti
Definizione 4.8.1. Uno spazio metrico (X, d) si dice sequenzialmente compatto se ogni
successione di punti (xn )n∈N in K ⊂ X ha una sottosuccessione che converge ad un
elemento di K.
Definizione 4.8.2. Un insieme K nello spazio metrico (X, d) si dice limitato se per ogni
punto x0 ∈ X esiste R > 0 tale che K ⊂ B(x0 , R).
Matteo Gallone - Analisi Matematica II
4.9
Spazi metrici e normati
Insiemi connessi
37
Proposizione 4.8.3. Sia (X, d) uno spazio metrico e sia K ⊂ X un sottoinsieme
compatto. Allora K è chiuso e limitato.
Dimostrazione. Proviamo che K = K. Per ogni x ∈ K esiste una successione (xn )n∈N in K che converge ad x. Questa
successione ha una sottosuccessione (xnj )j∈N che converge ad un elemento di K. Ma questo elemento deve essere x, che
quindi appartiene a K.
Supponiamo per assurdo che K non sia limitato. Allora esiste un punto x0 ∈ X tale che K ∩ (X \ B(x0 , R)) 6= ∅
per ogni R > 0. In particolare, con la scelta R = n ∈ N esistono punti xn ∈ K tali che d(xn , x0 ) ≥ n. La successione
(xn )n∈N è in K. Quindi esiste una sottosuccessione (xnj )j∈N convergente ad un elemento x ∈ K. Ma allora d(x, x0 ) ≥
d(x0 , xnj ) − d(xnj , x) ≥ nj − d(xnj , x) → ∞ per j → ∞. Ma questo è assurdo perchè d(x, x0 ) < ∞ per definizione di
distanza.
Teorema 4.8.4 (Heine-Borel). Sia Rm con m ≥ 1 munito della distanza euclidea e sia
K ⊂ Rn un insieme. Sono equivalenti le seguenti affermazioni.
i) K è compatto;
ii) K è chiuso e limitato.
Dimostrazione. L’implicazione i) ⇒ ii) è banale per Proposizione 4.8.3.
Proviamo quindi l’implicazione ii) ⇒ i). Sia (xn )n∈N una successione di punti in K. Scriviamo le coordinate xn =
1
1
(x1n , . . . , xm
n ). La successione reale (xn )n∈N è limitata e dunque ha una sottosuccessione (xnj )j∈N convergente ad un numero
x1 ∈ R. La successione (x2nj )j∈N è limitata e quindi ha una sottosuccessione convergente ad un numero x2 ∈ R. Si ripete
tale procedimento di sottoselezione m volte. Dopo m sottoselezioni successive si trova una scelta di indici j → kj tale che
ciascuna successione di coordinate (xik )j∈N converge ad un numero xi ∈ R, i = 1, . . . , m. Ma allora (xkj )j∈N converge a
j
x = (x1 , . . . , xm ) ∈ Rm . Siccome K è chiuso deve essere x ∈ K.
Teorema 4.8.5. Siano (X, dX ) e (Y, dY ) spazi metrici e sia f : X → Y continua. Se X
è compatto allora f (X) ∈ Y è compatto in Y .
Dimostrazione. Sia (yn )n∈N una successione in f (X). Esistono punti xn ∈ X tali che f (xn ) = yn con n ∈ N. La
successione (xn )n∈N ha una sottosuccessione (xnj )j∈N che converge ad un punto x0 ∈ X. Siccome f è continua si ha
limj→∞ f (xnj ) = f (x0 ). In altri termini, ynj → f (x0 ) ∈ f (X) per j → ∞.
Corollario 4.8.6 (Weierstrass). Sia (X, d) uno spazio metrico compatto e sia f : X → R
una funzione continua. Allora esistono x0 , x1 ∈ X tali che
f (x0 ) = max f (x) e f (x1 ) = min f (x)
x∈X
x∈X
Dimostrazione. Poichè X è un compatto ed f è continua allora anche f (X) ⊂ R è compatto. In particolare f (X) è chiuso
e limitato e quindi ammette massimo e minimo.
4.9
Insiemi connessi
Definizione 4.9.1. Uno spazio metrico (X, d) si dice connesso se X = A1 ∪A2 con A1 , A2
aperti tali che A1 ∩ A2 = ∅ implica che A1 = ∅ oppure A2 = ∅.[7]
Se un insieme X dotato della distanza dX non è connesso, allora esistono due insiemi
aperti disgiunti e non vuoti A1 e A2 tali che X = A1 ∪ A2 . Quindi A1 = X \ A2 e
A2 = X \ A1 sono contemporaneamente aperti e chiusi. Se invece X è connesso allora ∅
e X sono gli unici insiemi ad essere sia aperti e sia chiusi.
Definizione 4.9.2. Sia (X, d) uno spazio metrico e sia Y ⊂ X un suo sottoinsieme.
Allora (Y, d) è uno spazio metrico che avrà la sua topologia τ (Y ), detta topologia indotta
(o topologia relativa) da X su Y .
Definizione 4.9.3. Sia (X, d) uno spazio metrico. Un sottoinsieme Y ⊂ X si dice
connesso se è connesso rispetto alla topologia indotta. Precisamente, se Y = (Y ∩ A1 ) ∪
(Y ∩A2 ) con A1 , A2 aperti di X e unione disgiunta, allora Y ∩A1 = ∅ oppure Y ∩A2 = ∅.
Proposizione 4.9.4. L’intervallo I = [0, 1] ∈ R è connesso.
[7] Ovvero
un insieme K si dice connesso se non esistono A1 , A2 aperti tali che X = A1 ∪ A2 e A1 ∩ A2 6= ∅.
Matteo Gallone - Analisi Matematica II
38
Spazi metrici e normati
4.9
Insiemi connessi
Dimostrazione. Siano A1 , A2 due insiemi non vuoti tali che A1 ∩ A2 = ∅ e I = (I ∩ A1 ) ∪ (I ∩ A2 ). Supponiamo, ad
esempio 0 ∈ A1 . Definiamo allora x̄ = sup{x ∈ [0, 1]|[0, x) ⊂ I ∩ A1 }, ovvero x è l’estremo superiore di I ∩ A1 . Supponiamo
ora per assurdo che x̄ ∈ A2 . Allora, per definizione di estremo superiore, si ha che per qualche ε > 0, x̄ − ε ∈ A1 . Ma ciò
implica I ∩ A1 ∩ A2 6= ∅. Quindi si deve avere necessariamente x̄ ∈
/ A2 . Supponiamo ora che x̄ < 1. Allora si avrebbe che
∃δ > 0 tale che x̄ + δ ∈ A1 , assurdo per la definizione di estremo superiore. Si deve allora avere per forza x̄ = 1 e quindi
A2 = ∅. Il che è come dire che I è connesso.
Teorema 4.9.5. Siano (X, dX ) e (Y, dY ) due spazi metrici e sia f : X → Y continua.
Allora se X è connesso anche f (X) ⊂ Y è connesso.
Dimostrazione. Siano A1 , A2 ⊂ Y aperti tali che f (X) = (f (X) ∩ A1 ) ∪ (f (X) ∩ A2 ) con unione disgiunta. Allora
X = f −1 (f (X)) = f −1 ((f (X)∩A1 )∪(f (X)∩A2 )) = f −1 (f (X)∩(A1 ))∪f −1 (f (X)∩A2 ) = (X ∩f −1 (A1 ))∪(X ∩f −1 (A2 )) =
f −1 (A1 ) ∪ f −1 (A2 ). Il primo passaggio è dovuto al fatto che f è definita su X, mentre l’ultimo passaggio è dovuto al fatto
che f −1 (A1 ) ⊂ X, quindi X ∩ f −1 (A1 ) = f −1 (A1 ), e per la stessa ragione X ∩ f −1 (A2 ) = f −1 (A2 ). L’ultima unione è
disgiunta e gli insiemi f −1 (A1 ), f −1 (A2 ) sono aperti. Siccome X è connesso deve essere f −1 (A1 ) = ∅ oppure f −1 (A2 ) = ∅.
Dunque, si ha f (X) ∩ A1 = ∅ oppure f (X) ∩ A2 = ∅. E quindi anche f (X) è connesso.
Definizione 4.9.6. Uno spazio metrico (X, d) si dice connesso per archi se per ogni
coppia di punti x, y ∈ X esiste una curva continua γ : [0, 1] → X tale che γ(0) = x e
γ(1) = y.
Teorema 4.9.7. Se uno spazio metrico (X, d) è connesso per archi allora è connesso.
Dimostrazione. Supponiamo per assurdo che X non sia connesso. Allora esistono due aperti A1 , A2 disgiunti e non vuoti
tali che X = A1 ∪ A2 . Siano x ∈ A1 e y ∈ A2 , e sia γ : [0, 1] → X una curva continua tale che γ(0) = x e γ(1) = y. Ma
allora [0, 1] = ([0, 1] ∩ γ −1 (A1 )) ∪ ([0, 1] ∩ γ −1 (A2 )) con unione disgiunta e γ −1 (A1 )) e γ −1 (A2 )) aperti non vuoti in [0, 1].
Ma ciò è assurdo in quanto per la Proposizione 4.9.4 [0, 1] è connesso.
Teorema 4.9.8. Sia A ∈ Rn un aperto connesso e non vuoto. Allora A è connesso per
archi.
Dimostrazione. Dimostreremo un’affermazione più precisa, ovvero che A è connesso per curve poligonali. Sia x0 ∈ A un punto scelto a nostro piacere. Definiamo l’insieme A1 = {x ∈ A : x si connette a x0 con una curva poligonale contenuta in A}.
Proviamo che A1 è aperto. Infatti, se x ∈ A1 ⊂ A allora esiste ε > 0 tale che B(x, ε) ⊂ A, in quanto A è aperto.
Ogni punto di y ∈ B(x, ε) si collega al centro x con un segmento contenuto in A. Dunque y si collega a x0 con una curva
poligonale contenuta in A, ovvero B(x, ε) ∈ A1 .
Sia A2 = A \ A1 . Proviamo che anche A2 è aperto. Se x ∈ A2 ⊂ A allora esiste ε > 0 tale che B(x, ε) ⊂ A2 . Se così
non fosse troveremmo y ∈ B(x, ε) ∩ A1 . Il punto x0 si collega a y con una curva poligonale in A ed y si collega ad x con
un segmento contenuto in A. Quindi x ∈ A1 che non è possibile perchè per ipotesi x ∈ A2 e A1 ∩ A2 = ∅. A2 quindi è
aperto. Allora abbiamo X = A1 ∪ A2 con A1 e A2 aperti ed in unione disgiunta. Siccome X è connesso, uno degli aperti
deve essere vuoto. Siccome A1 6= ∅ allora A2 = ∅. Questo termina la dimostrazione.
Teorema 4.9.9 (dei valori intermedi). Sia A ⊂ Rn un aperto connesso e sia f : A → R
una funzione continua. Allora per ogni t ∈ (inf A f, supA f ) esiste un punto x ∈ A tale che
f (x) = t.
Dimostrazione. Siano x0 , x1 ∈ A tali che f (x0 ) < t < f (x1 ). Sia γ : [0, 1] → A una curva continua tale che γ(0) = x0 e
γ(1) = x1 . La composizione ϕ(s) = f (γ(s)) con s ∈ [0, 1], tale che ϕ(s) = t. Il punto x = γ(s) ∈ A verifica la tesi del
teorema.
Matteo Gallone - Analisi Matematica II
CAPITOLO
5
Calcolo differenziale in Rn
In questo capitolo, per distinguere gli elementi appartenenti a Rn con n ≥ 2 dagli elementi
appartenenti a R si usano le seguenti notazioni: ~x ∈ Rn e x ∈ R. Generalmente un
elemento ~x ∈ Rn avrà n componenti che saranno degli scalari, ovvero si scriverà ~x =
(x1 , . . . , xi , . . . , xn ). Non verrà fatta invece, alcuna differenza nella scrittura tra funzioni
scalari e funzioni vettoriali.
5.1
Limiti
La definizione di limite per funzioni in una variabile reale si estende facilmente alle funzioni
di due o più variabili reali. A tale scopo consideriamo un sottoinsieme A ⊂ Rn ed una
funzione A → R, cioè z = f (~x). Sia inoltre (~x0 ) un punto di accumulazione per l’insieme
A.
Consideriamo innanzi tutto il caso in cui ` sia finito, cioè ` ∈ R. Si dice che f (~x) tende
a ` per (~x) che tende a (~x0 ) se, qualunque sia ε > 0, esiste δ > 0 tale che
|f (~x) − `| < ε
(5.1)
per ogni ~x ∈ A, ~x 6= ~x0 e |~x − ~x0 | < δ.
I due casi di limite infinito (` = ∞ e ` = −∞) si trattano in modo analogo fra loro.
Di seguito consideriamo il solo caso ` = ∞.
Si dice che f (~x) tende a ∞ per ~x che tende a ~x0 se, qualunque sia M > 0 esiste δ > 0
tale che
f (~x) > M
(5.2)
per ogni ~x ∈ A, ~x 6= ~x0 e |~x − ~x0 | < δ.
Osservazione 5.1.1. Sia f : A → Rm una funzione con A ⊂ Rn . Si dice che f =
(f1 , . . . , fm ) tende a ~` se ogni funzione coordinata fi : A → R tende a `i ∈ R, con
i = 1, . . . , m.
Definizione 5.1.2. Sia f : A → Rm una funzione definita in un insieme A ⊂ Rn e sia ~x0
un punto di A. Si dice che la funzione f è continua su A se per ogni ε > 0 esiste δ > 0
tale che
|f (~x) − f (~x0 )| < ε
(5.3)
per ogni ~x ∈ A e |~x − ~x0 | < δ. Si dice inoltre che f è continua nell’insieme A se è continua
in ogni punto ~x0 di A.
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.2
Derivate parziali e differenziabilità
40
Definizione 5.1.3. Dati due spazi metrici (X, dX ) e (Y, dY ) si dice che una funzione
f : X → Y è uniformemente continua se ∀ε > 0 ∃δ > 0 tale che ∀x1 , x2 ∈ X si ha
dX (x1 , x2 ) < δ ⇒ dY (f (x1 ), f (x2 )) < ε.
Teorema 5.1.4 (di Cantor[1] ). Siano (X, dX ) e (Y, dY ) spazi metrici e f : X → Y una
funzione continua. Se X è compatto allora f è uniformemente continua.
5.2
Derivate parziali e differenziabilità
Definizione 5.2.1. Sia A un insieme aperto di Rn e f : A → R una funzione definita su
A. Sia inoltre ~x0 un punto fissato di A. La derivata parziale di f rispetto alla componente
xi di ~x nel punto ~x0 è (se esiste ed è finito) il limite
f (~x0 + h~ei ) − f (~x0 )
h→0
h
lim
(5.4)
Dove ~ei è il vettore di tutti zeri tranne l’i -esima componente che è uguale a 1.
Per la derivata parziale di f rispetto ad x si usano i simboli ∂f
, fx , Dx f .
∂x
La definizione di derivata parziale è stata data per ogni punto interno ad A. Non è
invece possibile, in generale, considerare il rapporto incrementale nei punti di frontiera.
In questi casi, non si procede con il rapporto incrementale, ma nel modo seguente: si
suppone che D sia un dominio di Rn , cioè D è la chiusura dell’insieme aperto. Si suppone
che esistano le derivate parziali in ogni punto ~x ∈ D e si considerano i limiti
lim fx1 (~x)
~
x→~
x0
...
lim fxn (~x)
~
x→~
x0
(5.5)
e allora, per l’ipotesi di continuità i limiti sono uguali rispettivamente a fx1 (~x0 ), . . . , e
fxn (~x0 ) se il punto ~x0 è interno all’insieme, mentre vengono assunti come valore delle n
derivate se ~x0 è un punto di frontiera per l’insieme.
Le due derivate parziali vengono quindi prolungate per continuità. Tuttavia non è
detto che tale limite esista sempre finito. Nei casi in cui il limite non esista oppure non
sia finito si dice che la funzione non è derivabile in ~x0 .
Prendiamo ad esempio il caso della
funzione f : A → R con A ⊂ R ; un suo generico punto sarà della forma (x, y, f (x, y)) ∈
R3 .
Considero la derivata parziale rispetto ad una componente come la curva descritta dalla
f ristretta a tale componente, quindi può essere vista come costituita da un vettore varia
∂f
(x,
y)
e
bile per
ciascuna
componente
del
dominio.
Nel
nostro
caso
avremo
~
v
=
1,
0,
1
∂x
Interpretazione geometrica della derivata parziale
2
~v2 = 0, 1, ∂f
(x, y) con ~v1 , ~v2 ∈ R3 . Tali vettori formano il cosiddetto piano tangente [2]
∂y
al grafico di f nel punto (x, y, f (x, y)), ed esso sarà
{α~v1 + β~v2 ∈ R3 : α, β ∈ R}
Definizione 5.2.2. Una funzione f si dice derivabile in un punto ~x0 se nel punto ~x0
esistono tutte le derivate parziali.
Definizione 5.2.3. Sia f una funzione derivabile in un punto ~x di un aperto A ⊆ Rn ;
cioè esistano in ~x le derivate parziali (fx1 , . . . , fxn ) di f . Il gradiente di f nel punto ~x è per
[1] Il
teorema è meglio noto come Teorema di Heine-Cantor.
precisato più avanti che l’esistenza del piano tangente in un punto è legata all’esistenza del differenziale in quel
punto. La sola derivabilità non basta per dire che in un punto esiste il piano tangente.
[2] Verrà
Matteo Gallone - Analisi Matematica II
5.2
Calcolo differenziale in Rn
Derivate parziali e differenziabilità
41
definizione il vettore ∇f ∈ Rn le cui componenti sono le derivate parziali di f . Ovvero:
∂f
(x)
∂x1
..
∇f (~x) =
.
∂f
(x)
∂xn
Per il gradiente si usano i simboli Df , gradf , ∇f .
Una generalizzazione del concetto di gradiente è quello di matrice Jacobiana.
Definizione 5.2.4. Sia f una funzione da Rn a Rm , derivabile in un punto ~x = (x1 , x2 , . . . , xn ).
La matrice Jacobiana di f è una matrice m × n costruita così
∂f1
∂f1
· · · ∂x
∂x1
n
..
..
Jf (x1 , x2 , . . . , xn ) = ...
(5.6)
.
.
∂fm
∂fm
· · · ∂xn
∂x1
Sia ora f (x, y) una funzione in due variabili reali, derivabile in un aperto A ⊆ R2 ,
allora le due derivate possono a loro volta essere derivabili. Se ciò si verifica si parla allora
2
∂2f
x
x
di derivate seconde e si indicano con i simboli ∂∂xf2 , ∂x∂y
, fxx , fxy , ∂f
, ∂f
.
∂x
∂y
Spesso le quattro derivate parziali seconde si dispongono in una matrice 2 × 2 detta
matrice Hessiana e si denota con il simbolo Hf o ∇2 f
!
2
Hf = ∇ f =
∂fx
∂x
∂fy
∂x
∂fx
∂y
∂fy
∂y
(5.7)
Se esistono le quattro derivate parziali di f nel punto (x0 , y0 ), cioè se è definita la matrice
Hessiana in quel punto, allora si dice che f è derivabile due volte in (x0 , y0 ). Se ciò si
verifica in tutti i punti di un aperto A ⊆ R2 allora si dice che f è derivabile due volte in
A.
Il seguente teorema viene enunciato e dimostrato solo per le funzioni f : R2 → R.
Il teorema si generalizza ad una funzione g : Rn → R prendendo in considerazione el
derivate miste gxi xj e gxj xi . Considerando solo queste due derivate parziali tuttavia si
intende tenere tutte le altre variabili come costanti e quindi ci si riconduce sempre ad un
problema in R2 . Il teorema seguente ha quindi validità generale.
Teorema 5.2.5 (di Schwarz). Sia A un aperto di R2 , (x0 , y0 ) ∈ A e f (x, y) una funzione
derivabile due volte in A. Se le derivate seconde miste fxy (x, y) e fyx (x, y) sono continue
nel punto (x0 , y0 ) allora risulta fxy (x0 , y0 ) = fyx (x0 , y0 ).
Dimostrazione. Sia (x, y) un punto generico dell’insieme A, con x 6= x0 e y 6= y0 , e si considerino poi anche i punti (x0 , y) e
(x, y0 ). Calcoliamo la funzione f in corrispondenza dei quattro punti (x, y), (x0 , y0 ), (x0 , y) e (x, y0 ). Definiamo le seguenti
funzioni in una variabile reale F (x) = f (x, y) − f (x, y0 ) e G(y) = f (x, y) − f (x0 , y). Si applica il teorema di Lagrange a
F (x) − F (x0 ) = F 0 (x1 )(x − x0 ) = (fx (x1 , y) − fx (x1 , y0 ))(x − x0 ). Si applica ancora una volta Lagrange a quest’ultima
quantità: (fx (x1 , y) − fx (x1 , y0 ))(x − x0 ) = fxy (x1 , y1 )(x − x0 )(y − y0 ). Procedendo in modo analogo per la funzione G(y),
determineremo l’esistenza di x2 ∈ [x0 , x] e y2 ∈ [y0 , y] tali che G(y) − G(y0 ) = fyx (x2 , y2 )(x − x0 )(y − y0 ).
Da verifica diretta risulta poi F (x) − F (x0 ) = G(y) − G(y0 )[3] , quindi fxy (x1 , y1 )(x − x0 )(y − y0 ) = fyx (x2 , y2 )(x −
x0 )(y − y0 ) e quindi fxy (x1 , y1 ) = fyx (x2 , y2 ). Passando al limite per (x, y) → (x0 , y0 ) anche (x1 , y1 ) → (x0 , y0 ) e
(x2 , y2 ) → (x0 , y0 ). Quindi, applicando l’ipotesi di continuità per le derivate seconde di f si ottiene fxy (x0 , y0 ) = fyx (x0 , y0 ).
Una generalizzazione del concetto di derivata parziale, si ha nella derivata direzionale.
Definizione 5.2.6. Un vettore di modulo uguale a 1 si chiama direzione.
[3] Infatti G(y) = f (x, y) − f (x , y), G(y ) = f (x, y ) − f (x , y ), F (x) = f (x, y) − f (x, y ) e F (x ) = f (x , y) − f (x , y ).
0
0
0
0 0
0
0
0
0 0
Sostituendo si ottiene G(y) − G(y0 ) = f (x, y) − f (x0 , y) − f (x, y0 ) + f (x0 , y0 ) = f (x, y) − f (x, y0 ) − f (x0 , y) + f (x0 , y0 ) =
[f (x, y) − f (x, y0 )] − [f (x0 , y) − f (x0 , y0 )] = F (x) − F (x0 ).
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.2
Derivate parziali e differenziabilità
42
Definizione 5.2.7. Sia A un aperto di Rn ed f (~x) una funzione definita su A. Fissata una
direzione su Rn , ovvero un vettore ~λ ∈ Rn con |~λ| = 1, si definisce la derivata direzionale
della funzione f nel punto ~x e nella direzione ~λ, il limite
f (~x + t~λ) − f (~x)
t→0
t
lim
(5.8)
purchè il limite esista e sia finito.
, Dλ f .
La derivata direzionale si indica con uno dei simboli ∂f
∂λ
Una condizione più forte della derivabilità in uno spazio n-dimensionale è la differenziabilità. Mentre, infatti, la derivabilità non implica la continuità più avanti si vedrà che
la differenziabilità implica la continuità.
Definizione 5.2.8. Siano A un aperto di Rn e ~x0 ∈ A. Una funzione f : A → Rm ,
derivabile nel punto ~x0 , si dice differenziabile nel punto ~x0 se esiste T ∈ L(Rn , Rm ) tale
che
fi (~x) − fi (~x0 ) − T (~x − ~x0 )
lim
=0
(5.9)
(~
x→~
x0 )
k~x − ~x0 k
per tutte le m componenti. La trasformazione T si dice differenziale di f in ~x0 e si indica
T = df (~x0 ).
Analogamente alla continuità e alla derivabilità, se f è differenziabile in ogni punto di
A allora si dice che f è differenziabile in A.
Una formula particolarmente significativa per la differenziabilità di una funzione si
ottiene utilizzando il simbolo di “o piccolo” [4] . Con tale notazione la funzione f è differenziabile nel punto ~x0 ∈ A se è derivabile in ~x0 e se
f (~x0 + ~v ) = f (~x0 ) + T (~x − ~x0 )~v + o(k~v k).
(5.10)
Geometricamente la differenziabilità di una funzione è legata all’esistenza del piano
tangente al grafico della funzione nel punto.
Per generalizzare facilmente il concetto di differenziabilità di funzioni in più variabili
si può usare la notazione vettoriale. Oltre all’ormai noto vettore ~x, si definisce il vettore
∂f
∂f
~v = (h1 , h2 , . . . , hn ) e, dato che il prodotto scalare h∇f (~x), ~v i = ∂x
(~x)h1 + ∂x
(~x)h2 +
1
2
∂f
· · · + ∂xn (~x)hn , si dice che una funzione è differenziabile se vale la relazione di limite:
f (~x + ~v ) − f (~x) − h∇f (~x), ~v i
=0
kvk
~v →~0
lim
(5.11)
oppure, utilizzando la notazione di “o piccolo”, la funzione f è differenziabile se
f (~x + ~v ) = f (~x) + h∇f (~x), ~v i + o(k~v k)
(5.12)
I prossimi teoremi dimostrano che è equivalente utilizzare una di queste tre notazioni
e, inoltre, che se una funzione è differenziabile allora è continua.
Teorema 5.2.9. Sia f : A → Rm e ~x0 ∈ A; allora f è differenziabile in ~x0 se e solo
se f (~x) = f (~x0 ) + T (~x − ~x0 ) + E(~x, ~x0 ) dove T ∈ L(Rn , Rm ) e E è un errore tale che
x,~
x0 )
lim~x→~x0 E(~
= 0.
k~
x−~
x0 k
f (~
x)−f (~
x )−T (~
x−~
x )
0
0
Dimostrazione. Definiamo la funzione R(~
x, ~
x0 ) =
. Da questa relazione ricavo f (~
x). Risulta f (~
x) =
k~
x−~
x0 k
f (~
x0 ) + T (~
x−~
x0 ) + k~
x−~
x0 kR(~
x, ~
x0 ). Il termine k~
x−~
x0 kR(~
x, ~
x0 ) è il nostro errore. Infatti E(~
x, x~0 ) = k~
x−~
x0 kR(~
x, ~
x0 ),
E(~
x,~
x )
si dividano ambedue i membri per k~
x−~
x0 k e si ottiene R(~
x, ~
x0 ) = k~x−~x 0k . Infatti per ~
x→~
x0 si ha che R(~
x, ~
x0 ) → 0.
0
Quindi effettivamente si tratta di un errore.
[4] Si dice che una funzione f (~
x) e si scrive f1 (~
x) = o(f2 (~
x)) se f2 (~
x) → 0 per
1 x) è “o piccolo” di un’altra funzione f2 (~
f (~
x)
~
x → ~0 e se è vera la relazione di limite lim~x→~0 f1 (~x) = 0.
2
Matteo Gallone - Analisi Matematica II
5.2
Calcolo differenziale in Rn
Derivate parziali e differenziabilità
43
Per dimostrare l’implicazione inversa ricavo E(~
x, ~
x0 ) da f (~
x) = f (~
x0 ) + T (~
x−~
x0 ) + E(~
x, ~
x0 ). Ottengo E(~
x, ~
x0 ) =
f (~
x) − f (~
x0 ) − T (~
x−~
x0 ). Divido ambedue i membri per k~
x−~
x0 k e ne faccio il limite per ~
x → ~
x0 . Allora si ottiene
E(~
x,~
x )
f (~
x)−f (~
x0 )−T (~
x−~
x0 )
lim~x→~x0 k~x−~x 0k = lim~x→~x0
. Ma per la definizione di errore, il primo membro dell’uguaglianza tende
k~
x−~
x k
0
0
a 0. Quindi si ottiene lim~x→~x0
f (~
x)−f (~
x0 )−T (~
x−~
x0 )
k~
x−~
x0 k
= 0 che è esattamente come dire che la funzione è differenziabile.
Teorema 5.2.10. Siano f : A → Rm e ~x0 ∈ A, se f è differenziabile in ~x0 allora f è
continua in ~x0 .
Dimostrazione. Discende dalla linearità del limite. Infatti se f è differenziabile allora f (~
x) = f (~
x0 ) + T (~
x−~
x0 ) + E(~
x, ~
x0 ).
Facendo il limite dell’uguaglianza per ~
x → ~
x0 si ottiene: lim~x→~x0 f (~
x) = lim~x→~x0 (f (~
x0 ) + T (~
x−~
x0 ) + E(~
x, ~
x0 )) =
x, ~
x0 ) = f (~
x0 ). Scriviamo vicini il primo e l’ultimo membro dell’uguaglianza:
x−~
x0 ) + lim~x→~x0 E(~
f (~
x0 ) + lim~x→~x0 T (~
x) = f (~
x0 ). Quindi la funzione è continua.
lim~x→~x0 f (~
Teorema 5.2.11. Siano f : A → Rm e ~x0 ∈ A, se f è differenziabile allora
∂f
(~x0 )
∂~v
= T~v .
f (~
x +t~
v )−f (~
x )
0
0
Dimostrazione. La definizione di derivata direzionale è ∂f
(~
x0 ) = limt→0
dove t è l’incremento infinite∂~
v
t
simo e ~v è una direzione. Applico ora le sostituzioni f (~
x0 ) = f (~
x) − T (~
x−~
x0 ) + E(~
x, ~
x0 ) e ~
x0 = ~
x − t~v (ovvero
f (~
x0 +t~
v )−f (~
x0 )
f (~
x−t~
v +t~
v )−f (~
x)+T (~
x−~
x0 )−E(~
x,~
x0 )
T (t~
v )−E(~
x0 +t~
v ,~
x0 )
~
x−~
x0 = t~v ) a limt→0
=
lim
=
lim
. Poichè T
t→0
t→0
t
t
t
è lineare allora posso scrivere T (t~v ) = tT (~v ), quindi limt→0
E(~
x0 +t~
v ,~
x0 )
limt→0 k~v k
tk~
vk
=
E(~
x0 +t~
v ,~
x0 )
k~v k limt→0
k~
v kt
tT (~
v)
t
= T (~v ), e per definizione di errore limt→0
E(~
x0 +t~
v ,~
x0 )
t
=
= 0. Quindi in definitiva si è dimostrata la tesi.
Grazie a quest’ultimo teorema siamo in grado di definire cosa sia esattamente T =
df (~x0 ). Sia quindi T la matrice relativa a tale funzione. Sappiamo che Tij = hT~ej , ~ei i =
∂fi
∂f
(~xj ), ~ei i = ∂x
(~x0 ). Si ritiene opportuno ricordare che j = 1, . . . , m sono le colonne
h ∂x
j
j
della matrice mentre i = 1, . . . , n sono le righe. Risulta quindi che:
T = df (~x0 ) = Jfi (~x0 )
(5.13)
Nel caso in cui m = 1 allora si ha che df (~x0 ) = ∇f (~x0 ).
Osservazione 5.2.12. Sia f : A → R una funzione differenziabile nel punto ~x0 ∈ A ⊂ Rn
(con A insieme aperto); possiamo quindi considerare la funzione (affine) ϕ : Rn → R tale
che ϕ(~x) = f (~x0 ) + h∇f (~x0 ), ~x − ~x0 i. Allora possiamo scrivere
f (~x) = ϕ(~x) + E(~x, ~x0 )
(5.14)
dove E è il solito errore. Questo significa che ϕ approssima f vicino a ~x0 con un errore
molto più piccolo della distanza k~x − ~x0 k. Il piano affine che costituisce il grafico di ϕ
gr(ϕ) = (~x, ϕ(~x)) ∈ Rn+1 : ~x ∈ Rn
si dice tangente al grafico di f nel punto (~x, f (~x). L’equazione cartesiana di tale piano
risulta essere
xn+1 = f (~x0 ) + h∇f (~x0 ), ~x − ~x0 i
Definizione 5.2.13. Dato un insieme A ⊂ Rn aperto, definiamo l’insieme delle funzioni
derivabili con derivate parziali continue C 1 (A, Rm ). Quindi una funzione si dice di classe
C 1 (A, Rm ) nel caso in cui f ∈ C 1 (A, Rm ).
Teorema 5.2.14 (del differenziale totale). Sia f : A → Rm una funzione derivabile in
un aperto A ⊆ Rn . Se f ∈ C 1 (A) allora f è differenziabile in A.[5]
Dimostrazione. Per semplicità consideriamo il caso f : R2 → R. Consideriamo la quantità f (x + h, y + k) − f (x, y) =
[f (x + h, y + k) − f (x, y + k) + f (x, y + k) − f (x, y)] = [f (x + h, y + k) − f (x, y + k)] + [f (x, y + k) − f (x, y)]. Applicando
il teorema di Lagrange, esistono x1 ∈ [x, x + h] e y1 ∈ [y, y + k] tali che [f (x +h, y + k) − f (x, y + k)] + [f (x, y + k) −
f (x+h,y+k)−f (x,y)−fx (x,y)h−fy (x,y)k =
√
f (x, y)] = fx (x1 , y +k)h+fy (x, y1 )k. Usando tale relazione calcoliamo la quantità h2 +k2
fx (x1 ,y+k)h+fy (x,y1 )k−fx (x,y)h−fy (x,y)k h(fx (x1 ,y+k)−fx (x,y))+k(fy (x,y1 )−fy (x,y)) . Raccogliendo h e k al numeratore si ha .
√
√
h2 +k2
h2 +k2
h(fx (x1 ,y+k)−fx (x,y))+k(fy (x,y1 )−fy (x,y)) |h||f
(x
,y+k)−f
(x,y)|+|k||f
(x,y
)−f
(x,y)|
x
x
y
y
1
1
≤
√
√
Per le proprietà del modulo, si ha =
h2 +k2
h2 +k2
[5] Ovvero, più scorrevolmente, Se f è derivabile in x ∈ A e in quel punto le sue derivate sono continue allora f è
0
differenziabile.
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.3
Funzioni composte
44
√
|h|
h2 +k2
|fx (x1 , y + k) − fx (x, y)| + √
Quindi vale anche la relazione √
|k|
h2 +k2
|fy (x, y1 ) − fy (x, y)|. Le quantità √
|h|
|h|
h2 +k2
e √
|k|
h2 +k2
sono minori o uguali a 1.
|k|
|fx (x1 , y + k) − fx (x, y)| + √ 2 2 |fy (x, y1 ) − fy (x, y)| ≤ |fx (x1 , y + k) − fx (x, y)| +
h +k
f (x+h,y+k)−f (x,y)−fx (x,y)h−fy (x,y)k ≤ |fx (x1 , y + k) − fx (x, y)| +
√
|fy (x, y1 ) − fy (x, y)|. In definitiva vale la relazione 2
2
h2 +k2
h +k
|fy (x, y1 ) − fy (x, y)|.
Calcoliamo il limite per (h, k) → (0, 0). x1 converge a x e y1 converge a y. Per l’ipotesi di continuità delle derivate
parziali si ha che lim(h,k)→(0,0) [|fx (x1 , y + k) − fx (x, y)| + |fy (x, y1 ) − fy (x, y)|] = 0. Quindi per confronto la funzione è
differenziabile.
5.3
Funzioni composte
Proposizione 5.3.1. Siano f, g : A → Rm funzioni differenziabili nel punto ~x0 ∈ A con
A ⊂ Rn ; allora la funzione f + g : A → Rm è anch’essa differenziabile nel punto ~x0 e
inoltre vale
d(f + g)(~x0 ) = df (~x0 ) + dg(~x0 )
o in alternativa si può dire anche Jf +g(~x0 ) = Jf (~x0 ) + Jg (~x0 ).
Teorema 5.3.2 (Differenziale della funzione composta). Sia f : A → Rm una funzione
differenziabile nel punto ~x0 ∈ A con A ⊂ Rn , e g : B → Rk una funzione differenziabile
in f (~x0 ) ∈ B, con B ⊂ Rm insieme aperto; allora la composizione g ◦ f : A → Rk è
differenziabile, e inoltre risulta
d(g ◦ f )(~x0 ) = dg(f (~x0 )) · df (~x0 )
o equivalentemente Jg◦f (~x0 ) = Jg (f (~x0 ))Jf (~x0 ). Ove d(f ◦g)(~x0 ) ∈ L(Rn , Rk ), dg(f (~x0 )) ∈
L(Rm , Rk ) e df (~x0 ) ∈ L(Rn , Rm ).
Dimostrazione. Sia ~
x0 ∈ A un punto con A ⊂ Rn insieme aperto, e siano T = df (~
x0 ) ∈ L(Rn , Rm ) e S = dg(~
y0 ) ∈
L(Rm , Rk ) funzioni differenziali tali che f (~
x) = f (~
x0 ) + T (~
x−~
x0 ) + k~
x−~
x0 kω(~
x, ~
x0 ) con ω(~
x, ~
x0 ) errore, e g(~
y) =
g(~
y0 ) + S(~
y−~
y0 ) + k~
y−~
y0 kϑ(~
y, ~
y0 ) con ϑ errore. Poniamo quindi ~
y = f (~
x) e ~
y0 = f (~
x0 ) e otteniamo g(f (~
x)) =
g(f (~
x0 )) + S(f (~
x) − f (~
x0 )) + kf (~
x) − f (~
x0 )kϑ(f (~
x), f (~
x0 )). Si sostituisce ora a f (~
x) la sua espressione ottenendo: g(f (~
x)) =
g(f (~
x0 )) + S(f (~
x0 ) + T (~
x−~
x0 ) + k~
x − x~0 kω(~
x, ~
x0 ) − f (~
x0 )) + kf (~
x0 ) + T (~
x−~
x0 ) + k~
x−~
x0 kω(~
x, ~
x0 ) − f (~
x0 )kϑ(f (~
x), f (~
x0 )) =
g(f (~
x0 )) + S(T (~
x−~
x0 ) + k~
x − x~0 kω(~
x, ~
x0 )) + kT (~
x−~
x0 ) + k~
x−~
x0 kω(~
x, ~
x0 )kϑ(f (~
x), f (~
x0 )). Ora per la linearità di S
si ha che S(T (~
x−~
x0 ) + k~
x − x~0hkω(~
x, ~
x0 )) = S(T
(~
x
−
~
x
))
+
k~
x
−
x
~
kS(ω(~
x
,
~
x
)).
Raccolgo
quindi k~
x−~
x0 k ottenendo:
0
0
0
i
T (~x−~x )
x), f (~
x0 )) . Per trovare la tesi non devo fare altro
x, ~
x0 ) ϑ(f (~
g(f (~
x0 ))+S(T (~
x−~
x0 ))+k~
x−~
x0 k S(ω(~
x, ~
x0 )) + k~x−~x 0k + ω(~
0
che dimostrare che la quantità tra parentesi quadre è infinitesima. Osservo quindi che il termine S(ω(~
x, ~
x0 )) è infinitesimo
per l’ipotesi di linearità di S, osservo poiche ϑ(f (~
x, ~
x0 )) è infinitesimo
perchè f è continua[6] e perchè ϑ(~
y, ~
y0 ) → 0 quando
T (~x−~x )
~
y → y~0 . Resta quindi da dimostrare che k~x−~x 0k + ω(~
x, ~
x0 ) è una quantità limitata. Per la disuguaglianza triangolare si
0
T (~x−~x ) T (~x−~x ) T (~x−~x )
x, ~
x0 ) ≤ k~x−~x 0k +kω(~
x, ~
x0 )k. Ora kω(~
x, ~
x0 )k tende a 0. Per quanto riguarda la quantità k~x−~x 0k ,
ha k~x−~x 0k + ω(~
0
0
0
consideriamo l’insieme compatto K = {~
x ∈ Rn : k~
xk = 1} e la funzione ϕ.K → R continua tale che ϕ(~
x) = kT (~
x)k. Per il
teorema di Weierstrass ϕ(~
x) assume massimo su quel compatto, esiste quindi ~
x0 tale che ϕ(~
x) ≤ ϕ(~
x0 ) = M . Dimostrando
che questa quantità è limitata la dimostrazione è terminata.
Corollario 5.3.3 (Derivata di una funzione composta con una curva). Siano γ : [0, 1] →
Rn di classe C 1 e una funzione f : Rn → R differenziabile in Rn . Allora si ha che
d
f (γ(t)) = h∇f (γ(t)), γ 0 (t)i
dt
Dimostrazione. Definiamo ϕ(t) = f (γ(t)), t ∈ [0, 1] che è differenziabile per il teorema precedente. Inoltre si ha ϕ0 (t) =
P
∂f
0
dϕ(t) = df (γ(t)) ◦ γ 0 (t) = Jf (γ(t))Jγ (t) = n
i=1 ∂x (γ(t))γi (t) = h∇f (γ(t)), γ (t)i.
i
Esempio. Calcolare tutte le funzioni u(x, y) ∈ C 1 (R2 ) che risolvono l’equazione
∂u
∂u
+
=0
∂x
∂y
Soluzione. Notiamo che
∂u
∂x
+
∂u
∂y
= h∇u, (1, 1)i, ove (1, 1) potrebbe essere la derivata prima di una curva del tipo γ(t) =
x0 + t
d
(x0 , 0) + t(1, 1), ovvero γ(t) =
. Risolvendo quindi in R2 l’equazione dt
u(γ(t)) = h∇u(γ(t)), γ̇(t)i = 0 si ottiene
t
Rt
d
u(γ(t)) = 0, ovvero 0 du(γ(τ )) = 0 che implica appunto u(γ(t)) − u(γ(0)) = 0. Ma, per come è definita γ si ha che
dt
[6] Detto grossolanamente, se una funzione è continua allora ad una piccola variazione delle x corrisponde una piccola
variazione delle y.
Matteo Gallone - Analisi Matematica II
5.4
Calcolo differenziale in Rn
Teoremi del valor medio
45
u(γ(0)) = u(x0 , 0) e u(x0 + t, t) = u(x, y). Tornando alla soluzione dell’integrale si ha u(γ(t)) − u(γ(0)) = 0, ovvero
u(x, y) − u(x0 , 0) = 0 che è esattamente come dire u(x, y) = u(x0 , 0). Definiamo ora u(x0 , 0) = f (x0 ) e vediamo che, per
come è definita γ si ha x0 = x − t e y = t, quindi x0 = x − y. Quindi u(x, y) = f (x − y) per ogni f ∈ C 1 (R) è una soluzione
dell’equazione.
Per esempio (si provi) che f (x − y) = (x − y)2 verifica l’equazione come anche g(x − y) = ex−y .
5.4
Teoremi del valor medio
Teorema 5.4.1 (Valor medio per funzioni scalari). Sia f : A → R una funzione differenziabile nell’insieme A ⊂ Rn aperto; siano poi ~x, ~y ∈ A tali che
[~x, ~y ] = {t~x + (1 − t)~y ∈ Rn : t ∈ [0, 1]} ⊂ A
allora esiste un punto ~z ∈ [~x, ~y ] tale che f (~x) − f (~y ) = ∇f (~z) · (~x − ~y ).
Dimostrazione. Siano γ : [0, 1] → A una curva con γ(t) = t~
x + (1 − t)~
y e ϕ = f (γ(t)) con t ∈ [0, 1] e ϕ derivabile in tutti
i suoi punti. Per il teorema di Lagrange sappiamo che con n = 1 esiste un valore t? ∈ [0, 1] tale che ϕ(1) − ϕ(0) = ϕ0 (t? ).
Dato quindi ~
z = γ(t? ) ∈ [~
x, ~
y ] possiamo scrivere che f (~
x) − f (~
y ) = ∇f (~
z )(~
x−~
y ).
Teorema 5.4.2 (Valor medio per funzioni vettoriali). Sia f : A → Rm una funzione
differenziabile nell’insieme A ⊂ Rn aperto. Siano poi ~x, ~y ∈ A tali che
[~x, ~y ] = {t~x + (1 − t)~y ∈ Rn : t ∈ [0, 1]} ⊂ A
Allora per ogni ~v ∈ Rm esiste ~z ∈ [~x, ~y ] tale che
(f (~x) − f (~y )) · ~v = df (~z)(~x − ~y ) · ~v
Dimostrazione. Siano γ : [0, 1] → A con γ(t) = t~
x + (1 − t)~
y e sia ϕ(t) =Pf (γ(t)) · ~v ; risulterà che ϕ(1) − ϕ(0) =
n
f (~
x) · ~v − f (~
y ) · ~v = (f (~
x) − f (~
y ) · ~v . Consideriamo ora ϕ(t) = (f (γ(t)) · ~v =
i=1 fi (γ(t))vi e calcoliamone la derivata
P
P
n
n
d
d
0
?
prima: ϕ (t) = dt i=1 fi (γ(t))vi =
f
(γ(t))v
=
df
(γ(t
))(~
x
−
~
y
)
·
~
v
. Pertanto esisterà t? ∈ [0, 1] tale che
i
i
i=1 dt
ϕ(1) − ϕ(0) = ϕ0 (t? ). Sostituendo abbiamo (f (~
x) − f (~
y )) · ~v = df (γ(t? ))(~
x−~
y ) · ~v . Chiamando ~
z = γ(t? ) otteniamo la tesi.
Definizione 5.4.3. Sia T ∈ L(Rn , Rm ) differenziale lineare, definiamo la sua norma come
kT k = sup kT~x k
(5.15)
k~
xk≤1
dove T~x è l’immagine del differenziale.
Proposizione 5.4.4. L’insieme L(Rn , Rm ) delle funzioni lineari dotato della norma k · k
forma lo spazio normato (L(Rn , Rm ), k · k).
Dimostrazione. Bisogna dimostrare che le trasformazioni lineari T, S ∈ L(Rn , Rm ) verificano le proprietà dello spazio
metrico normato (Definizione 4.1.2).
Dimostriamo la proprietà 1). La condizione kTi k ≥ 0 è sempre verificata, come l’implicazione T = 0 ⇒ kT k = 0, la
verifica dell’implicazione inversa (ovvero kT k = 0 ⇒ T = 0) si trova osservando che kT k = 0 ⇒ kT~x k = 0 e che ∀kxk ≤ 1
T~x = 0.
Dimostriamo la proprietà 2). Dato λ ∈ R risulta kλT k = supk~xk≤1 kλT~x k = |λ| supk~xk≤1 kT~x k = |λ|kT~x k.
Dimostriamo ora la proprietà 3). Dimostriamo la disuguaglianza triangolare kT + Sk = supkxk≤1 k(T + S)(~
x)k. Per
linearità ora si ha che (T + S)(~
x) = T ~
x + S~
x quindi supkxk≤1 k(T + S)(~
x)k = supkxk≤1 kT~x + S~x k. Per le proprietà della
norma euclidea si ha che kT~x + S~x k ≤ kT~x k + kS~x k, quindi supkxk≤1 kT~x + S~x k ≤ supkxk≤1 (kT~x k + kS~x k). Ora per le
proprietà dell’estremo superiore[7] si ha che supkxk≤1 (kT~x k+kS~x k) ≤ supk~xk≤1 kT~x k+supk~xk≤1 kS~x k = kT k+kSk. Quindi
è dimostrata la disuguaglianza triangolare.
Proposizione 5.4.5. Sia A ⊂ Rn un insieme aperto e f : A → Rm una funzione differenziabile su tutto A; siano inoltre ~x, ~y ∈ A tali che [~x, ~y ] ⊂ A. Allora esiste ~z ∈ [~x, ~y ]
tale che
kf (~x) − f (~y )k ≤ kdf (~z)kk~x − ~y k
Dimostrazione. Dal teorema Teorema 5.4.2 sappiamo che per ogni ~v ∈ Rm esiste un valore ~
x ∈ [~
x, ~
y ] tale che (f (~
x) −
f (~
y )) · ~v = (df (~
z )(~
x−~
y ) · ~v . Scelto quindi ~v = f (~
x) − f (~
y ) risulta che: kf (~
x) − f (~
y )k2 = (df (~
z )(~
x−~
y )) · (f (~
x) − f (~
y )) ≤
kdf (~
z )(~
x −~
y ))·(f (~
x)−f (~
y ))k ≤ kdf (~
z )(~
x −~
y ))k·k(f (~
x)−f (~
y ))k. Or a possiamo dividere ambedue i membri per kf (~
x)−f (~
y )k,
ottengo kf (~
x) − f (~
y )k ≤ kdf (~
z )(~
x−~
y )k. Per la disuguaglianza di Schwarz allora kdf (~
z )(~
x−~
y )k ≤ kdf (~
z )kk(~
x−~
y )k. Quindi
si ottiene la tesi.
[7] Il
sup della somma è minore o uguale alla somma dei sup.
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.5
Derivate successive e Formula di Taylor
46
Definizione 5.4.6. Sia f : A → Rm una funzione differenziabile (con A ⊂ Rn ) e sia
supk~xk≤1 kdf (~x)k = L < ∞; allora
kf (~x) − f (~y )k ≤ Lk~x − ~y k
∀~x, ~y ∈ A. In tale caso la funzione si dice lipschitziana.
Teorema 5.4.7. Sia A ⊂ Rn un insieme aperto e connesso e la funzione f : A → Rm
differenziabile in A con df (~x) = 0 per ogni ~x ∈ A. Allora f è costante su A.
Dimostrazione. Voglio dimostrare che per ogni ~
x, ~
y ∈ A risulta che f (~
x) = f (~
y ). Congiungo i punti ~
xe~
y con una poligonale
contenuta in A con γ(a) = ~
x e γ(b) = ~
y . Allora suppongo che [a, b] ⊂ A; ma allora per la Proposizione 5.4.5 si ha:
kf (~
x) − f (~
y )k ≤ kdf (~
z )kk~
x−~
y k. Ma poichè df (~
z ) = 0 allora deve essere necessariamente f (~
x) = f (~
y ).
5.5
Derivate successive e Formula di Taylor
Abbiamo gia introdotto i concetti di derivate seconde e di matrice Hessiana per una
funzione di due variabili reali, ovvero f : R2 → R. In questo capitolo ci si ripropone di
generalizzare questi concetti e di trovare una formula che approssimi una funzione in più
variabili ad un punto.
Definizione 5.5.1. Sia A ⊂ Rn un insieme aperto e sia f : A → Rm una funzione tale
∂f
che esistono in A le sue derivate parziali ∂x
con i = 1, . . . , n; se esse risultano derivabili,
i
∂f
.
allora possiamo definire le derivate parziali seconde come ∂x∂ j ∂x
i
∂f
∂2f
Le derivate parziali seconde ∂x∂ j ∂x
si
indicano
in
uno
dei
seguenti
modi:
,
∂xi ∂xj
i
2
∂ij f , fij , fxi xj , Dij f , ∇ij f . Nel caso in cui i = j si usa anche la notazione ∂∂xf2 ; nel caso in
i
cui i 6= j le derivate parziali si dicono miste.
Anche per funzioni in più di due variabili vale il teorema di Schwarz (Teorema 5.2.5).
Esempio. Sia f : R2 → R la funzione così definita
(
f (x, y) =
xy 3
x2 +y 2
(x, y) 6= (0, 0)
(x, y) = (0, 0)
0
È facile dimostrare che la funzione è continua in tutto R2 . Infatti in tutto R2 \{(0, 0)} la funzione
è continua
in quanto somma
3 xy(x2 +y2 ) e composizione di funzioni continue ed è continua anche in (0, 0) poichè 0 ≤ x2xy
≤
=
|xy|.
Calcolando
2
2
2
+y
x +y
il limite lim(x,y)→(0,0) xy = 0 e quindi per il teorema dei carabinieri anche lim(x,y)→(0,0)
anche in (0, 0). Calcoliamo ora le sue derivate prime:
xy 3
x2 +y 2
= 0, quindi f è continua
∂f
y 3 (x2 + y 2 ) − xy 3 (2x)
y3
(x, y) =
= 2
(y 2 − x2 )
∂x
(x2 + y 2 )2
(x + y 2 )2
3y 2 x(x2 + y 2 ) − xy 3 2y
xy 2 (3x2 + y 2 )
∂f
(x, y) =
=
∂y
(x2 + y 2 )2
(x2 + y 2 )2
Se calcoliamo ora i valori delle derivate parziali rispetto a x e rispetto ad y otteniamo
∂f
f (h1 , 0) − f (0, 0)
(0, 0) = lim
= lim
h1 →0
h1 →0
∂x
h1
∂f
f (0, h2 ) − f (0, 0)
(0, 0) = lim
= lim
h2 →0
h2 →0
∂y
h2
0−0
=0
h1
0−0
=0
h2
Calcoliamo ora i valori delle derivate parziali seconde miste:
∂ ∂f
(0, 0) = lim
h2 →0
∂y ∂x
∂ ∂f
(0, 0) = lim
h1 →0
∂x ∂y
∂f
(0, h2 )
∂x
−
∂f
(0, 0)
∂x
h2
∂f
(h1 , 0)
∂y
−
h1
= lim
1
h2 = 1
h2
= lim
0−0
=0
h1
h2 →0
∂f
(0, 0)
∂y
h1 →0
Infatti questa funzione potrebbe essere presa come esempio di funzione con derivate parziali miste diverse tra loro.
Definizione 5.5.2. Si definisce l’insieme delle funzioni di classe C 2 (A, Rm ) come l’insieme
di quelle funzioni che hanno tutte le derivate seconde continue in A. Diremo che una
funzione è di classe C 2 se appartiene a questo insieme.
Matteo Gallone - Analisi Matematica II
5.5
Calcolo differenziale in Rn
Derivate successive e Formula di Taylor
47
Esempio. Calcolare tutte le soluzioni u(x, y) ∈ C 2 (R2 ) che risolvono l’equazione delle onde
∂2u
∂2u
−
=0
2
∂x
∂y 2
∂
∂
− ∂y
u = ∂x
+
2
∂2u
∂
∂
∂
− ∂∂yu
+ ∂y
2 =
∂x
∂x
∂x2
2
classe C per ipotesi allora le derivate
Soluzione. Si noti che
∂
∂y
∂u
∂x
−
∂u
∂y
. Infatti, svolgendo i calcoli si vede
che poichèu è di
miste sono uguali, e quindi vale questa uguaglianza. Chiamiamo ora
∂u
∂z
∂z
z(x, y) = ∂u
−
.
Quindi
la
nostra
equazione
diventa
+ ∂y
= 0 che sappiamo (perchè gia studiata in precedenza)
∂x
∂y
∂x
avere come soluzioni una funzione h(x − y) ∈ C 1 . Ma dire che h è una soluzione vuol dire che z(x, y) = h(x − y), ovvero
− ∂u
= h(x − y). Notiamo quindi che ∂u
− ∂u
=
vuol dire risolvere l’equazione differenziale a derivate parziali ∂u
∂x
∂y
∂x
∂y
h∇u, (1, −1)i. Quindi l’equazione differenziale è equivalente se scritta h∇u, (1, −1)i = h(x − y), ma anche in questo caso
(−1, 1) può essere vista come la derivata prima di una curva γ(t) = (x0 , 0) + t(1, −1), e quindi si ottiene la scrittura
h∇u(γ(t)), γ̇(t)i = h(γ1 (t) − γ2 (t)) (dove con γ1 e γ2 si intendono le due componenti della curva). Poichè per la derivata
d
d
della funzione composta si ha h∇u(γ(t)), γ̇(t)i = dt
u(γ(t)). Quindi si ottiene dt
u(γ(t)) = h(x0 + 2t) (infatti γ1 (t) = x0 + t
R
R
e γ2 (t) = −t, quindi γ1 (t) − γ2 (t) = x0 − 2t). Integrando ambo i membri in dt si ha 0t du(γ(τ )) = 0t h(x0 + 2τ ) dτ . Quindi
Rt
u(γ(t)) = u(γ(0)) + 0 h(x0 + 2τ ) dτ .
Ricaviamo ora x e y dall’equazione della curva. Si ha x = x0 + t e y = −t. Quindi x = x0 − y, ovvero x0 = x + y.
Quindi u(γ(0)) = u(x0 ) = g(x + y) con g ∈ C 2 (R). Abbiamo quindi trovato la soluzione generale dell’equazione, che è
R
u(x, y) = g(x + y) + 0−y h(x + y + 2τ ) dτ , per ogni h ∈ C 1 (R) e g ∈ C 2 (R). Detta H una primitiva di h si avrà che la
soluzione generale dell’equazione è u(x, y) = g(x + y) + H(x − y).
Definizione 5.5.3. Sia f ∈ C 2 (A, Rm ) con
simmetrica di ordine n × n
∂2f
x)
2 (~
∂x1.
..
Hf (~x) =
∂2f
(~x)
∂xn ∂x1
A ⊂ Rn , allora la matrice quadrata e
···
..
.
···
∂2f
(~x)
∂x1 ∂xn
..
.
∂2f
(~x)
∂x2
n
si dice matrice Hessiana di f nel punto ~x ∈ A.
Osservazione 5.5.4. Se la derivata prima fornisce una trasformazione lineare, la derivata seconda fornisce una forma quadratica.
Definizione 5.5.5. L’operatore differenziale in Rn
∆=
n
X
∂2
∂x2i
i=1
si dice operatore di Laplace.
Definizione 5.5.6. Una funzione u ∈ C 2 (A) con A ⊂ Rn tale che ∆u(~x) = 0 per ogni
valore di ~x ∈ A si dice armonica.
Lemma 5.5.7. Sia T ∈ L(Rn , Rm ) con T = (Tij )1≤i≤m , allora
1≤j≤n
kT k ≤
m X
n
X
! 21
Tij2
i=1 j=1
Pn
Pn
Dimostrazione. Per definizione kT k = supk~xk≤1 kT~x k; sia k~
xk ≤ 1 e ~
x =
x = T ( j=1 xj ej ) =
j=1 xj ej ; risulta che T~
P
Pn
Pn
Pn
Pm
m Pn
j=1 xj Tej con Tej unico in R così come i suoi coefficenti; inoltre
j=1 xj Tej =
j=1 xj
i=1 Tij ei =
i=1
j=1 xj Tij ei .
2 21
Pm Pn
Considero ora la norma in Rm di questa quantità e applico la disuguaglianza di Cauchy-Schwarz:
≤
i=1
j=1 xj Tij
P
m
i=1
k~
xk2
Pn
j=1
Tij
1
2
≤
P
m
i=1
Pn
j=1
2
Tij
1
2
. Questo termina la nostra dimostrazione.
Ora che sono state date alcune definizioni, possiamo parlare della formula di Taylor del
secondo ordine. Innanzi tutto è bene ricordare e generalizzare quanto detto in precedenza
nell’Osservazione 5.2.12. Infatti una funzione f : A → Rm con A ⊂ Rn si approssima
attorno a ~x0 al primo ordine:
f (~x) = f (~x0 ) + h∇f (~x0 ), ~x − ~x0 i + E(~x, ~x0 )
Con il seguente teorema si va avanti con lo sviluppo fino al secondo ordine.
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.6
Estremi relativi
48
Teorema 5.5.8 (Sviluppo di Taylor al secondo ordine). Sia A ⊂ Rn un insieme aperto,
f una funzione tale che f ∈ C 2 (A) e ~x0 ∈ A. Allora per ogni valore ~x contenuto in A tale
che [~x0 , ~x] ⊂ A, esiste ~z ∈ [~x0 , ~x] per cui vale
1
f (~x) = f (~x0 ) + h∇f (~x0 ), ~x − ~x0 i + h∇2 f (~z)(~x − ~x0 ), ~x − ~x0 i
2
Dimostrazione. Considero la funzione F : [0, 1] → R tale che F (t) = f (~
x0 + t(~
x−~
x0 )) con t ∈ [0, 1]. Risulta essere
F ∈ C 2 ([0, 1]), ma allora per lo sviluppo di Taylor in una dimensione e per t = 0 esiste un valore t? ∈ [0, t] per cui vale
1
x0 + t(~
x−~
x0 )), ~
x−~
x0 i =
l’espressione F (t) = F (0) + F 0 (0)t + 2 F 00 (t? )t2 . Calcoliamo ora quanto vale F 0 (t) = h∇f (~
Pn ∂f
Pn ∂f
P
Pn
∂ ∂f
(~
x0 + t~h)hi . Calcoliamo ora quanto vale F 00 (t) = d
(~
x0 − t~h)hi = n
(~
x0 + t~h)hi hj =
i=1 ∂xi
dt
i=1 ∂xi
j=1
i=1 ∂xj ∂xi
h∇2 f (~
x0 + t(~
x−~
x0 ))(~
x−~
x0 ), ~
x−~
x0 i. Osserviamo ora che valgono le seguenti uguaglianze: F (1) = f (~
x), F (0) = f (~
x0 ),
F 0 (0) = h∇f (~
x0 ), ~
x −~
x0 i. Pongo z = ~
x0 +t? (~
x −~
x0 ) ∈ [~
x0 , ~
x]. E sostituisco tutto questo in F (t) = F (0)+F 0 (0)t+ 21 F 00 (t? )t2 ,
ottenendo proprio: f (~
x) = f (~
x0 ) + h∇f (~
x0 ), ~
x−~
x0 i + 21 h∇2 f (~
z )(~
x−~
x0 ), ~
x−~
x0 i.
Corollario 5.5.9 (Resto nella forma di “o piccolo”). Se f ∈ C 2 (A) dove A ⊂ Rn è un
insieme aperto e ~x0 ∈ A, allora per ~x → ~x0 si ha:
1
f (~x) = f (~x0 ) + h∇f (~x0 ), ~x − ~x0 i + h∇2 f (~x0 )(~x − ~x0 ), ~x − ~x0 i + o(|~x − ~x0 k2 )
2
Dimostrazione. Per lo sviluppo di Taylor e per Weierstrass sappiamo che
x ∃~
z ∈ [~
x0 , ~
x] tale che f (~
x) = f (~
x0 ) +
∀~
h∇f (~
x0 ), ~
x−~
x0 i + 21 h∇2 f (~
x0 )(~
x−~
x0 ), ~
x−~
x0 i + 21 h ∇2 f (~
z ) − ∇2 f (~
x0 ) (~
x−~
x0 ), ~
x−~
x0 i. Voglio dimostrare ora che
E(~
x,~
x )
E(~
x, ~
x0 ) = 21 h ∇2 f (~
z ) − ∇2 f (~
x0 ) (~
x−~
x0 ), ~
x−~
x0 i è un errore; o in altri termini che lim~x→~x0 k~x−~x 0k2 = 0. Con0
2
2
sidero pertanto kE(~
x, ~
x0 )k e applico la disuguaglianza di Cauchy-Schwarz: kh ∇ f (~
z ) − ∇ f (~
x0 ) (~
x−~
x0 ), ~
x−~
x0 ik ≤
P
1
2
∂2f
∂2f
n
2
2
2
2
2
2
k∇ f (~
z ) − ∇ f (~
x0 )kk~
x−~
x0 k =
z ) − ∂x ∂x (~
x0 ))
k~
x−~
x0 k . Ma poichè f ∈ C abbiamo che le derii,j=1 ( ∂xi ∂xj (~
i
j
P
1
2
2
E(~
x,~
x )
∂2f
f
n
vate seconde sono continue, e quindi 0 ≤ lim~x→~x0 k~x−~x 0k2 ≤ lim~x→~x0
z ) − ∂x∂ ∂x
(~
x0 ))2
k~
x−~
x0 k2 = 0.
i,j=1 ( ∂xi ∂xj (~
i
j
0
La dimostrazione è terminata.
Definizione 5.5.10. Si definisce multiindice la quantità α ∈ Nn (con N dotato dello zero)
e
α1
α = ...
αn
e la sua lunghezza kαk = α1 + · · · + αn .
Teorema 5.5.11 (Formula di Taylor). Se A è un convesso[8] e f : A → R è di classe C k
per ogni ~x0 ∈ A si ha il seguente sviluppo (dove α è un multiindice, α! = α1 ! · · · · · αn !,
|α| = α1 + · · · + αn e hα = hα1 1 · · · · · hαnn ):
f (~x0 + ~h) =
X 1 ∂ |α| f
(~x0 )~hα + o(khkk )
α! ~xα
(5.16)
|α|≤k
5.6
Estremi relativi
Definizione 5.6.1. Siano f : A → R con A ⊂ Rn e ~x0 ∈ A; ~x0 si dice punto di minimo
relativo (locale) di f se esiste δ > 0 tale che
f (~x) ≥ f (~x0 )
∀~x ∈ A ∩ B(~x0 , δ). In particolare, se f (~x) > f (~x0 ) per ogni ~x ∈ A ∩ B(~x0 , δ) \ {~x0 } allora
~x0 si dirà punto di minimo relativo (locale) stretto.
Definizione 5.6.2. Siano f : A → R con A ⊂ Rn e ~x0 ∈ A; ~x0 si dice punto di massimo
relativo (locale) di f se esiste δ > 0 tale che
f (~x0 ) ≥ f (~x)
[8] Un
insieme si dice convesso se, presi comunque ~
x1 , ~
x2 ∈ A tutto il segmento [~
x1 , ~
x2 ] è contenuto in A.
Matteo Gallone - Analisi Matematica II
5.6
Calcolo differenziale in Rn
Estremi relativi
49
∀~x ∈ A ∩ B(~x0 , δ). In particolare, se f (~x0 ) > f (~x) per ogni ~x ∈ A ∩ B(~x0 , δ) \ {~x0 } allora
~x0 si dirà punto di massimo relativo (locale) stretto.
Definizione 5.6.3. Siano A ⊂ Rn un insieme aperto e ~x0 ∈ A e f ∈ C 1 (A). Se ∇f (~x0 ) = 0
allora ~x0 si dice punto critico di f .
Proposizione 5.6.4 (Condizione necessaria al primo ordine). Sia A ⊂ Rn un insieme
aperto e ~x0 ∈ A un suo punto, sia inoltre f ∈ C 1 (A); allora se ~x0 è punto di estremo
locale è anche punto critico.
Dimostrazione. Sia ad esempio ~
x0 un punto di minimo locale; allora esiste per definizione δ > 0 tale che B(~
x0 , δ) ⊂ A e
f (~
x) ≥ f (~
x0 ) per ogni ~
x ∈ B(~
x0 , δ). Fissato quindi i = 1, . . . , n, calcolo in base alla definizione le derivate parziali della
f (~
x0 +t~
ei )−f (~
x0 )
∂f
funzione in ~
x0 : ∂x
= limt→0±
= `. Osservo dunque che per t → 0+ si deve avere ` ≥ 0 mentre per t → 0−
t
i
∂f
si deve avere ` ≤ 0. Pertanto si deve avere ∂x
(~
x0 ) = ` = 0, ovvero ~
x0 è un punto critico di f .
i
Se invece ~
x0 è un massimo locale, la dimostrazione è analoga invertendo i segni delle disuguaglianze.
Definizione 5.6.5. Sia A una matrice simmetrica quadrata n × n; diciamo che:
1)
2)
3)
4)
5)
A
A
A
A
A
è
è
è
è
è
semidefinita positiva (A ≥ 0) se e solo se hA~x, ~xi ≥ 0 per ogni ~x ∈ Rn ;
definita positiva (A > 0) se e solo se hA~x, ~xi > 0 per ogni ~x ∈ Rn \ {0};
semidefinita negativa (A ≤ 0) se e solo se hA~x, ~xi ≤ 0 per ogni ~x ∈ Rn ;
definita negativa (A < 0) se e solo se hA~x, ~xi < 0 per ogni ~x ∈ Rn \ {0};
indefinita negli altri casi.
Lemma 5.6.6. Se A è una matrice simmetrica quadrata n × n definita positiva, allora
esiste un m > 0 tale che hA~x, ~xi ≥ mk~xk2 , per ogni ~x ∈ Rn .
Dimostrazione. Considero la funzione ϕ : Sn−1 → R (con S = {~
x ∈ Rn : k~
xk = 1}), tale che ϕ(~
x) = hA~
x, ~
xi; sotto queste
condizioni osservo che Sn−1 è un insieme compatto, e che ϕ è una funzione continua, pertanto sono soddisfatte le condizioni
per il teorema di Weierstrass, ed esisteràD un ~
x0 ∈ S Etale che
x
x0 ) = hA~
x0 , ~
x0 i = m > 0 per ipotesi, in quanto A
ϕ(~
) ≥ ϕ(~
è definita positiva. Pertanto risulta che
tesi: hA~
x, ~
xi ≥
x
A k~~x
,
k
~
x
k~
xk
=ϕ
~
x
k~
xk
≥ m. Ovvero, moltiplicando tutto per k~
xk2 si ottiene la
mk~
xk2 .
Proposizione 5.6.7 (Condizione necessaria al secondo ordine). Siano A ⊂ Rn un insieme
aperto, ~x0 un suo punto e f ∈ C 2 (A) una funzione. Se ~x0 è un punto di minimo locale
allora deve essere[9]
∇f (~x0 ) = 0
Hf (~x0 ) ≥ 0
Dimostrazione. Sia ~v ∈ Rn un vettore fissato k~v k = 1; per ipotesi esiste δ > 0 tale che B(~
x0 , δ) ⊂ A e f (~
x) ≥ f (~
x0 )
per ogni ~
x ∈ B(~
x0 , δ). Allora per t < δ sarà ~
x0 + t~v ∈ B(~
x0 , δ), e quindi dalla formula di Taylor per t → 0 ottengo
0 ≤ f (~
x0 + t~v ) − f (~
x0 ) = h∇f (~
x0 ), t~v )i + 21 t2 h∇2 f (~
x0~v , ~v i + o(k~v t2 k).
Dimostriamo che ii) ⇒ i). Supponiamo nullo in quel punto per la condizione necessaria al primo ordine. Inoltre, per le
proprietà della norma si ha che kt2~v k = t2 k~v k. Ma la norma di ~v è uguale a uno, quindi o(kt2~v k) = o(|t2 |) e dalla relazione
di prima otteniamo 0 ≤ 12 t2 h∇2 f (~
x0 )~v , ~v i + o(t2 ). Dividendo ambedue i membri per t2 > 0 si ha 0 ≤
da cui, facendo il limite per t → 0 si ottiene h∇2 f (~
x0 )~v , ~v i ≥ 0 che è come dire ∇2 f (~
x0 ) ≥ 0.
o(t2 )
1
h∇2 f (~
x0 )~v , ~v i + t2
2
Proposizione 5.6.8 (Condizione sufficente per un minimo locale stretto). Siano A ⊂ Rn
un insieme aperto, ~x0 ∈ A un suo punto e f ∈ C 2 (A) una funzione. Se sono verificate le
condizioni[10]
∇f (~x0 ) = 0 e Hf (~x0 ) > 0
allora ~x0 è un minimo locale stretto.
x0 )(~
x−~
x0 ), ~
x−
Dimostrazione. Per la formula di Taylor al secondo ordine ho f (~
x) − f (~
x0 ) = h∇f (~
x0 ), ~
x−~
x0 i + 12 h∇2 f (~
~
x0 i + o(k~
x−~
x0 k2 ) e inoltre, per il Lemma 5.6.6 esiste m > 0 tale che h∇2 f (~
z )(~
x−
~
x
),
~
x
−
~
x
x−~
x0 k2 . Unendo le
0
0 i ≥ mk~
o(k~
x−~
x k2 )
due espressioni ottengo f (~
x) − f (~
x0 ) ≥ m
k~
x−~
x0 k + o(k~
x−~
x0 k2 ) = k~
x−~
x0 k2 m
+ k~x−~x 0k2 . Quindi esiste δ > 0
2
2
0
o(k~
x−~
x k2 )
tale che k~x−~x 0k2 ≥ m
per ogni ~
x ∈ B(~
x0 , δ). Allora, preso ~
x ∈ B(~
x0 , δ) vale f (~
x) − f (~
x0 ) ≥
4
0
dedurre f (x) ≥ f (~
x0 ), ovvero che ~
x0 è un punto di minimo locale.
m
k~
x−~
x0 k2 ,
4
quindi è facile
Teorema 5.6.9. Sia A una matrice simmetrica n × n con autovalori λ1 ≤ · · · ≤ λn dove
λi ∈ Rn ; allora A ≥ 0 se e solo se λ1 ≥ 0 e A > 0 se e solo se λ1 > 0.
[9] Dove
[10] Dove
con Hf (~
x0 ) ≥ 0 si intende che la matrice Hessiana calcolata in ~
x0 deve essere semidefinita positiva.
con Hf (~
x0 ) > 0 si intende che la matrice Hessiana calcolata in ~
x0 deve essere definita positiva.
Matteo Gallone - Analisi Matematica II
Calcolo differenziale in Rn
5.6
Estremi relativi
50
Osservazione 5.6.10. Esaminiamo il caso delle matrici simmetriche 2 × 2: A ≥ 0 se e
solo se det(A) ≥ 0 e tr(A) ≥ 0 (e A > 0 se e solo se det(A) > 0 e tr(A) > 0); A ≤ 0 se
e solo se det(A) ≤ 0 e tr(A) ≤ 0 (e A < 0 se e solo se det(A) < 0 e tr(A) < 0).
Definizione 5.6.11. Sia F ∈ C 2 (A) una funzione con A ⊂ R2 e ~x0 ∈ A; se inoltre ~x0 è
un punto critico e Hf (~x0 ) < 0 allora diremo che ~x0 è un punto di sella.
Definizione 5.6.12. Sia A un insieme A ⊂ Rn aperto e k ∈ N definiamo l’insieme delle
funzioni di classe C k (A) come quelle funzioni che hanno continue tutte le derivate di ordine
k.
Una generica funzione appartenente a quell’insieme si dirà di classe C k .
T
k
Definizione 5.6.13. Definiamo inoltre l’insieme C ∞ (A) come C ∞ (A) = ∞
k=0 C (A).
Definizione 5.6.14. Una funzione f : Rn \ {0} → R tale che
f (λ~x) = λk f (~x)
∀~x 6= 0 e ∀λ > 0 per un certo k ∈ R si dice omogenea di grado k.
Lemma 5.6.15 (Formula di Eulero). Sia f ∈ C 1 (Rn \ {0}) omogenea di grado k, risulta
che
hf (~x), ~xi = kf (~x)
Dimostrazione. Fisso ~
x 6= 0 e prendo ~v = ~
x.
∂f
(~
x) =
∂~
v
(1+t)k −1
limt→0
f (~
x)
t
Calcolo il prodotto tra il gradiente di f e ~v : h∇f (~
x, ~v ) =
f (~
x+t~
v)
. Utilizzo ora la definizione di funzione omogenea (pongo λ = 1+t), quindi limt→0
limt→0
t
kf (~
x) calcolando il limite notevole. Quindi si è dimostrato quanto si voleva dimostrare.
Matteo Gallone - Analisi Matematica II
f (~
x+t~
v)
t
=
=
CAPITOLO
6
Ultimi teoremi
6.1
Teorema dell’invertibilità locale
Sia f : Rn → Rn una funzione lineare. Fissato un vettore b ∈ Rn l’equazione f (x) = b
(che è un sistema di equazioni reali) ha certamente una soluzione unica x ∈ Rn se f ha
determinante det f (x) 6= 0. In questo caso, infatti, la funzione è invertibile e la soluzione
x = f −1 (b).
Per generalizzare questo risultato al caso in cui f non sia una funzione lineare verranno
introdotti prima i concetti di diffeomorfismo e diffeomorfismo locale.
Definizione 6.1.1. Sia A ⊂ Rn un aperto. Una funzione f ∈ C k (A; Rn ), con 1 ≤ k < ∞
si dice diffeormorfismo di classe C k se
i) f : A → f (A) ∈ Rn è iniettiva (e suriettiva);
ii) la funzione inversa verifica f −1 ∈ C k (f (A); A); in particolare f (A) ⊂ Rn è un aperto.
Definizione 6.1.2. Sia A ⊂ Rn un aperto. Una funzione f ∈ C k (A; Rn ), k ≥ 1, si dice
diffeomorfismo locale di classe C k se:
i) f è aperta, e cioè trasforma insiemi aperti in aperti;
ii) Per ogni punto x ∈ A esiste un δ > 0 tale che f : B(x, δ) → Rn è iniettiva e la
funzione inversa verifica f −1 ∈ C k (f (B(x, δ)); Rn ).
Teorema 6.1.3 (Invertibilità locale). Sia A ⊂ Rn un aperto e sia f ∈ C k (A, Rn ), k ≥ 1.
Sono equivalenti le seguenti affermazioni:
i) f è un diffeomorfismo locale di classe C k ;
ii) det(Jf (x0 )) 6= 0 in ogni punto x0 ∈ A (dove Jf è la matrice Jacobiana di f ).
Dimostrazione. Dimostriamo che i) ⇒ ii). Fissiamo xo ∈ A e sia δ > 0 tale che f ∈ C k (B(x0 , δ); Rn ) sia un diffeomorfismo
di classe C k . Indichiamo con f −1 : f (B(x0 , δ)) → B(x0 , δ) la funzione inversa. Allora per ogni x ∈ B(x0 , δ) si ha
f −1 (f (x)) = x = In (x) (ove In (x) è la funzione identità In : Rn → Rn ). Dal teorema del differenziale della funzione
composta (Teorema 5.3.2) si ha che Jf −1 (x)Jf (x) = In per ogni x ∈ B(x, δ). Dal teorema sui determinanti si ottiene
allora det(Jf −1 (x)Jf (x)) = det(Jf −1 (x)) det(Jf (x)) = det(In ) = 1. Ciò implica det(Jf (x)) 6= 0 per ogni x ∈ B(x0 ; δ), e in
particolare per x = x0 .
Dimostriamo che ii) ⇒ i). La dimostrazione di questa seconda implicazione è lunga e - per alcuni versi - difficile da
seguire. Per uno studio più facile conviene dividerla in più parti: per dimostrare che f è un diffeomorfismo locale bisogna
dimostrare a) che f trasforma punti interni in punti interni; b) che f è localmente iniettiva e che f −1 è continua, infine c)
che f −1 è di classe C k . Sempre per lo stesso principio conviene dividere la prima parte in sottoparti nel seguente ordine:
a-1) Definire una funzione K(x) che ci permetta di provare che f è localmente suriettiva; a-2) Dimostrare che K(x) è una
contrazione (ovvero che a-2.1) Dimostrare che K è ben definita; a-2.2) Dimostrare che esiste un λ compreso tra zero e uno
tale che kK(x) − K(y)k < λkx − yk).
a-1) Definire una funzione K(x) che dimostri che f è localmente biiettiva. Supponiamo che sia det(Jf (x)) 6= 0
in ogni punto x ∈ A. Siano x0 ∈ A ed ε > 0 piccolo a piacere tale che B(x0 , ε) ⊂ A. Proveremo che esiste δ > 0
tale che B(f (x0 ), δ) ⊂ f (B(x0 , ε)). Da questo segue che f trasforma punti interni in punti interni e quindi aperti in
Matteo Gallone - Analisi Matematica II
Ultimi teoremi
6.2
Teorema sulla funzione implicita
52
aperti. L’affermazione appena scritta è equivalente a ∃δ > 0 tale che ∀y ∈ B(f (x0 ), δ) ∃x ∈ B(x0 , ε) tale che f (x) = y.
Fissiamo dunque y ∈ B(f (x0 ), δ)) con δ > 0 da determinare e cerchiamo un punto x ∈ B(x0 , δ) tale che f (x) = y. Sia
T = df (x0 ) ∈ L(Rn ; Rn ) il differenziale di f in x0 e osserviamo che det(T ) = det(Jf (x0 )) 6= 0. Dunque esiste l’operatore
lineare inverso T −1 ∈ L(Rn , Rn ). Definiamo la funzione K della variabile x come K(x) = x − T −1 (f (x) − y). Vogliamo
provare che K : B̄(x0 , ε) → B̄(x0 , ε) è una contrazione rispetto alla distanza standard. Siccome B̄(x0 , ε) è completo con
la distanza ereditata da Rn , dal teorema del punto fisso di Banach (Teorema 4.6.3) segue che esiste un (unico) punto
x ∈ B̄(x0 , ε) tale che x = K(x). Ma allora x = K(x) = x − T −1 (f (x) − y) ⇔ 0 = T −1 (f (x) − y) ⇔ f (x) − y = 0 e quindi
f (x) = y, che è quel che cercavamo.
a-2) Dimostrare che K(x) è una contrazione. Dobbiamo però mostrare ora che K è una contrazione, ovvero che
K è ben definita e cioè trasforma B̄(x, ε) in sé stesso; e che |K(x) − K(y)| ≤ λ|x − y| con 0 < λ < 1.
a-2.1) Provare che K(x) è ben definita. Per provare che K è ben definita conviene introdurre la funzione ausiliaria
∂gi (x0 )
= 0 con i, j = 1, . . . , n. Siccome
g(x) = x − T −1 (f (x)). Osserviamo che dg(x0 ) = In − T −1 df (x0 ) = 0, ovvero ∂x
j
g è di classe C 1 (poichè f ∈ C 1 ), pur di prendere un ε > 0 più piccolo, si può per continuità supporre che kdgk ≤ 12
∀x ∈ B(x0 , ε).[1] Per il teorema del valor medio (Teorema 5.4.1) esiste z ∈ [x0 , x] tale che |g(x) − g(x0 )| ≤ kdg(x)k|x − x0 |
e quindi |K(x)−x0 | ≤ kdg(z)k|x−x0 |+kT −1 k|f (x0 )−y| ≤ 12 ε+δkT −1 k. In definitiva sarà sufficiente sciegliere δ < 2kTε−1 k
affinché K sia ben definita.
a-2.2) Provare che K(x) è una contrazione trovando il fattore contrattivo. Per ogni x, x̄ ∈ B̄(x0 , ε) si ha
come sopra |K(x) − K(x̄)| = |x − T −1 (f (x) − y) − x + T −1 (f (x̄) − y)| = |x − T −1 (f (x)) − x̄ + T −1 (f (x̄))| = |g(x) − g(x̄)| ≤
kdg(z)k|x − x̄| ≤ 21 |x − x̄|. Dunque K è una contrazione con fattore contrattivo 12 .
b) Provare che f è localmente iniettiva e che f −1 è continua. Il prossimo obiettivo è provare che esiste
una costante M > 0 tale che per ogni x, x̄ ∈ B(x0 , ε) si ha |f (x) − f (x̄)| ≥ M |x − x̄|. Tale maggiorazione, infatti,
1
|y − ȳ|. La verifica di
implica che f è iniettiva e che f −1 è continua. Precisamente, f −1 verifica |f −1 (y) − f −1 (ȳ)| ≤ M
−1
|f (x) − f (x̄)| ≥ M |x − x̄| si riconduce nuovamente alle proprietà di g. |x − x̄| = |g(x) + T (f (x)) − g(x̄) + T −1 (f (x̄))| ≤
|g(x) − g(x̄)| + kT −1 k|f (x) − f (x̄)| ≤ 12 |x − x̄| + kT −1 k|f (x) − f (x̄)|, e quindi |f (x) − f (x̄)| ≥ 2kT1−1 k |x − x̄|.
c) Provare che f −1 è di classe C k . Rimane da provare che la funzione inversa f −1 : f (B(x0 , ε)) → (B(x0 , ε) è
di classe C k . Proviamo che f −1 è differenziabile con derivate parziali continue (ovvero è di classe C 1 ). Per ipotesi si ha
f (x) = f (x0 ) + df (x0 )(x − x0 ) + o(|x − x0 |), e invertendo l’identità precedente con y = f (x) e y0 = f (x0 ) si ottiene
f −1 (y) − f −1 (y0 ) = df (x0 )−1 (y − y0 − o(k|x − x0 |)) = df (x0 )−1 (y − y0 ) − df (x0 )−1 (o|f −1 (y) − f −1 (y0 )|). Ma poichè
1
|y−y0 | allora si deduce che df (x0 )−1 (o|f −1 (y)−f −1 (y0 )|) = o(|y−y0 |) e quindi f −1 è differenziabile
|f −1 (y)−f −1 (y0 )| ≤ M
−1
con differenziale df (y0 ) = df (x0 ). Poichè il differenziale può essere rappresentato come la matrice delle derivate parziali,
da quest’ultima espressione si vede che la continuità delle derivate parziali di f −1 segue dalla continuità di quelle di f .
Analogo discorso vale per la regolarità superiore.
Esempio. Si consideri il sistema di due equazioni nelle incognite x, y ∈ R:
x + y sin x = b1
x2 y + sin y = b2
dove b = (b1 , b2 ) è un vettore assegnato.
Certamente, quando ~b = ~0 il sistema ha almeno la soluzione nulla x = y = 0. Ci proponiamo di dimostrare che esistono
due numeri ε > 0 e δ > 0 tali che per ogni b ∈ B(0, ε) esiste un’unica soluzione (x, y) ∈ B(0, δ) del sistema.
x + y sin x
Sia f : R2 → R2 la funzione f (x, y) =
. Risulta f ∈ C ∞ (R2 ; R2 ). La matrice Jacobiana di f è
x2 y + sin y
Jf (x, y) =
1 + y cos x
2xy
sin x
x2 + cos y
Nel punto (0, 0) si ha det Jf = 1 > 0 e per continuità si deduce l’esistenza di δ > 0 tale che Jf (x, y) > 0 per ogni
(x, y) ∈ B(0, δ). Dunque f è un diffeomorfismo locale di classe C ∞ su B(0, δ). Per il teorema dell’invertibilità locale
(Teorema 6.1.3), pur di prendere un δ > 0 ancora più piccolo, f è anche aperta ed iniettiva su B(0, δ). Dunque l’insieme
f (B(0, δ)) ⊂ R2 è aperto e siccome 0 = f (0) ∈ f (B(0, δ)) allora esiste ε > 0 tale che B(0, ε) ⊂ f (B(0, δ)).
Se b ∈ B(0, ε) allora esiste (x, y) ∈ B(0, δ) tale che f (x, y) = b e per l’iniettività di f il punto è unico.
6.2
Teorema sulla funzione implicita
Sia f : R2 → R una funzione e consideriamo l’equazione f (x, y) = 0 nelle variabili
x, y ∈ R. Ci domandiamo quando tale equazione definisca implicitamente una funzione
y = ϕ(x), ovvero una funzione ϕ : R → R tale che il luogo degli zeri di ϕ coincida con il
grafico di ϕ.
Il teorema del Dini fornisce una condizione sufficiente affinchè ciò avvenga localmente.
Siano p, q ∈ N interi tali che p, q ≥ 1. Scomponiamo Rn = Rp × Rq , con n = p + q.
Indichiamo con x ∈ Rp la variabile di Rp e con y ∈ Rq la variabile di Rq . Data quindi
una funzione f : Rp × Rq → Rq che ha derivate parziali, definiamo le seguenti matrici
[1] Questa
affermazione può essere provata partendo dalla disuguaglianza kdgk ≤
che le derivate parziali sono continue.
Matteo Gallone - Analisi Matematica II
Pn
i,j=1
∂gi (x)
∂xj
2 21
, usando il fatto
6.3
Ultimi teoremi
Estremi locali vincolati
53
Jacobiane parziali
∂f1
∂x1
∂f
= ...
∂x
∂fq
∂x1
...
..
.
...
∂f1
∂xp
...
..
.
...
∂f1
∂yq
..
.
matrice q × p
∂fq
∂xp
e analogamente
∂f1
∂y1
∂f
= ...
∂y
∂fq
∂y1
..
.
matrice q × q
∂fq
∂yq
Teorema 6.2.1 (del Dini). Siano A ⊂ Rp × Rq un insieme aperto, (x0 , y0 ) ∈ A e sia
f ∈ C 1 (A; Rq ) una funzione di classe C 1 che verifica
∂f (x0 , y0 )
f (x0 , y0 ) = 0 det
6= 0
(6.1)
∂y
Allora esistono due numeri η, δ > 0 ed esiste una funzione ϕ ∈ C 1 (B(x0 , δ); B(y0 , ε)) tale
che:
i) B(x0 , δ) × B(y0 , ε) ⊂ A;
ii) {(x, ϕ(x)) ∈ Rp+q : x ∈ B(x0 , δ)} = {(x, y) ∈ B(x0 , δ) × B(y0 , ε) : f (x, y) = 0};
ovvero ϕ è il luogo degli zeri di f (x, y).
iii) La funzione ϕ verifica
−1
∂ϕ
∂f (x, ϕ(x))
∂f (x, ϕ(x))
=−
, x ∈ B(x0 , δ)
(6.2)
∂x
∂y
∂x
dove
∂ϕ
∂x
indica la matrice Jacobiana di ϕ e a destra si intende il prodotto di matrici.
Dimostrazione. Dimostriamo la i). Definiamo la funzione F : A → Rp × Rq come F (x, y) = (x, f (x, y)), (x, y) ∈ A.
1
n
Siccome f ∈ C 1 (A; Rq ), risulta che
! F ∈ C (A; R ). Inoltre si ha F (x0 , y0 ) = (x0 , 0). La matrice Jacobiana di F è
Ip
0
∂f (x0 ,y0 )
, e dunque nel punto (x0 , y0 ) ∈ A si ha det(JF (x, y)) = det
6= 0. Per il
JF (x, y) =
∂f (x,y)
∂f (x,y)
∂y
∂x
∂y
teorema di invertibilità locale (Teorema 6.1.3) esiste η > 0 tale che F ∈ C 1 (B(x0 , η) × B(y0 , η); Rn ) è un diffeomorfismo
sull’immagine. In particolare, l’insieme B = F (B(x0 , η) × B(y0 , η)) è aperto e (x0 , 0) = F (x0 , y0 ) ∈ B. Dunque esiste
δ > 0 tale che B(x0 , δ) × B(0, δ) ⊂ B. Indichiamo con G : A → A la funzione inversa di F , G = F −1 ∈ C 1 (B; A), e
indichiamo con G1 e G2 le componenti di G in Rp e Rq , G = (G1 , G2 ) ∈ (Rp , Rq ). Risulta G = f (x, G2 (x, y)), infatti
(x, y) = F (G(x, y)) = F (G1 (x, y), f (G1 (x, y), G2 (x, y)). Nelle coordinate (x, y), il luogo di zeri di f è dato dall’equazione
y = 0. Questo suggerisce la definizione ϕ(x) = G2 (x, 0) con x ∈ B(x0 , δ). Risulta ϕ ∈ C 1 (B(x0 , δ); B(y0 , η)).
Proviamo l’uguaglianza insiemistica ii). Per ogni x ∈ B(x0 , δ) si ha f (x, ϕ(x)) = f (x, G2 (x, 0)) = 0, e quindi (x, ϕ(x)) ∈
{(x, y) ∈ B(x0 , δ) × B(y0 , η) : f (x, y) = 0}. Questo prova l’inclusione “⊂”. Proviamo ora l’inclusione opposta. Siano
x ∈ B(x0 , δ) e y ∈ B(y0 , η) tali che f (x, y) = 0. Allora si ha (x, y) = G(F (x, y)) = G(x, f (x, y)) = G(x, 0) = (x, G2 (x, 0)) =
(x, ϕ(x)), per cui si deduce y = ϕ(x).
Per provare la iii) basta derivare rispetto a x l’identità f (x, ϕ(x)) = 0. Infatti per il Teorema 5.3.2 per ogni x ∈ B(x0 , δ)
∂f (x,ϕ(x))
∂f (x,ϕ(x)) ∂ϕ(x)
si ha
+
= 0. Ricavando ∂ϕ
dalla precedente uguaglianza si ottiene la tesi.
∂x
∂y
∂x
∂x
Esempio. Prendiamo la funzione f : R2 → R definita come f (x, y) = x2 − y 2 − 1. Il luogo degli zeri di questa funzione è
x2 − y 2 − 1 = 0. Calcoliamo ∂f
= −2y. Questo ci dice che quell’equazione definisce implicitamente una funzione per tutti
∂y
√
√
i −2y 6= 0 ⇒ y 6= 0. Infatti, sappiamo che questa funzione esiste ed è y = x2 − 1 oppure y = − x2 − 1. Nei punti
p in cui
∂f
y = 0 si può tuttavia esprimere il luogo degli zeri come funzione di y in quanto ∂x (±1, 0) 6= 0, ed essa sarà x = y 2 + 1 o
p
x = − y 2 + 1.
Generalmente, tuttavia, non esiste un’espressione analitica per queste funzioni.
6.3
Estremi locali vincolati
Definizione 6.3.1. Siano M ⊂ Rn (con n ≥ 2) un insieme, A ⊂ Rn un insieme aperto ed
f : A → R una funzione. Diciamo che un punto x0 ∈ M ∩ A è un punto di minimo locale
di f ristretta (o vincolata) su M se esiste δ > 0 tale che B(x0 , δ) ⊂ A e f (x) ≥ f (x0 ) per
ogni x ∈ M ∩ B(x0 , δ).
Matteo Gallone - Analisi Matematica II
Ultimi teoremi
6.5
Sottovarietà di Rn
54
Definizione 6.3.2. Siano M ⊂ Rn (con n ≥ 2) un insieme, A ⊂ Rn un insieme aperto ed
f : A → R una funzione. Diciamo che un punto x0 ∈ M ∩ A è un punto di massimo locale
di f ristretta (o vincolata) su M se esiste δ > 0 tale che B(x0 , δ) ⊂ A e f (x) ≤ f (x0 ) per
ogni x ∈ M ∩ B(x0 , δ).
Si usa di solito chiamare vincolo l’insieme M utilizzato nelle due precedenti definizioni.
Il teorema che segue permette di trovare estremani locali di una funzione ristretta in
particolari vincoli.
Teorema 6.3.3 (Moltiplicatori di Lagrange). Siano A ⊂ Rn un insieme aperto, f ∈
C 1 (A), ed M = {x ∈ Rn : h(x) = 0}, dove h ∈ C 1 (Rn ) è una funzione che verifica
∇h(x) 6= 0 per ogni x ∈ M . Se x̄ ∈ M è un punto di estremo locale di f su M , allora
esiste un numero λ ∈ R, detto moltiplicatore di Lagrange, tale che ∇f (x̄) = λ∇h(x̄).
Dimostrazione. Siccome il gradiente di h è sempre diverso da 0, possiamo supporre (senza perdere di generalità) che
∂h(x̄)
6= 0. Infatti esisterà sempre almeno una componente di ∇h diversa da 0.
∂x
n
Introduciamo la notazione x = (x0 , xn ) con x0 ∈ Rn−1 e xn ∈ R. Per il Teorema 6.2.1 esistono δ, η > 0 ed esiste
una funzione ϕ ∈ C 1 (B(x̄0 , δ); B(x̄n , η)) tale che {(x0 , ϕ(x0 )) ∈ Rn : x ∈ B(x̄0 , δ)} = {x ∈ B(x̄0 , δ) × B(x̄n , η) : h(x) = 0}.
Ricordando poi che M sono tutti quegli x per cui h(x) = 0 allora possiamo scrivere {x ∈ B(x̄0 , δ) × B(x̄n , η) : h(x) = 0} =
M ∩ B(x̄0 , δ) × B(x̄n , η).
Quindi possiamo riscrivere M = {x ∈ Rn : h(x) = 0} = {(x0 , ϕ(xn )) : h(x0 , ϕ(x0 )) = 0}. Inoltre f vincolata su M si
può scrivere come f (x0 , ϕ(x0 )). Per ipotesi, inoltre, si ha che f ha punto di estremo locale in x̄0 ; ovvero ∇f (x̄0 , x̄n ) = 0.
Calcolando esplicitamente:
∂f (x,ϕ(x))
∂x
=
∂f (x̄)
∂xi
+
∂f (x̄) ∂ϕ(x̄0 )
∂xn
∂xi
Inoltre dal teorema della funzione implicita sappiamo che
= 0.
∂ϕ(x0 )
∂x0
=−
∂h(x̄)
∂xn
−1
∂h(x̄)
,
∂xi
ovvero che
∂h(x̄)
∂ϕ(x̄0 ) ∂h(x̄)
+ ∂x
∂xi
∂xn
i
=
0.
∂f (x̄)
∂f (x̄) ∂ϕ(x̄0 )
∂f (x̄)
∂f (x̄)
∂xn
Scegliamo ora il numero λ = ∂h(x̄)
= 0. Si ottiene ∂x +
∈ R e sostituiamolo nell’equazione ∂x + ∂x
∂xi
n
i
i
∂xn
0
0 0
∂h(x̄) ∂ϕ(x̄ )
∂h(x̄) ∂ϕ(x̄ )
∂h(x̄) ∂ϕ(x̄ )
1 ∂f (x̄)
1 ∂f (x̄)
λ ∂x
= λ λ ∂x + ∂x
= 0 che implica λ ∂x + ∂x
= 0 in quanto λ 6= 0. Ma poichè si ha
∂x
∂x
∂x
n
i
anche
∂h(x̄)
∂xi
i
+
∂ϕ(x̄0 ) ∂h(x̄)
∂xi
∂xn
n
i
i
Da qui si ottiene facilmente (eliminando i termini uguali dai due membri
i. In notazione compatta è esattamente come dire che ∇f (x̄) = λ∇h(x̄).
6.4
n
i
∂ϕ(x̄0 ) ∂h(x̄)
∂h(x̄) ∂ϕ(x̄0 )
1 ∂f (x̄)
= λ
+ ∂x
.
∂xi
∂xn
∂xi
∂xi
n
∂h(x̄)
∂f (x̄)
dell’uguaglianza) che ∂x = λ ∂x per qualsiasi
i
i
= 0 allora le due espressioni si possono eguagliare:
∂h(x̄)
∂xi
+
Sottovarietà di Rn
Definizione 6.4.1. Un insieme M ⊂ Rn è una sottovarietà differenziabile di Rn di classe
C k , k ≥ 1, e di dimensione d, con 1 ≤ d ≤ n − 1, se per ogni x̄ ∈ M esistono δ > 0 ed
f ∈ C k (B(x̄, δ); Rn−d ) tali che:
i) B(x̄, δ) ∩ M = {x ∈ B(x̄, δ) : f (x) = 0};
ii) rk(Jf (x)) = n − d in ogni punto x ∈ B(x̄, δ). (ipotesi di rango massimo).
Definizione 6.4.2. Sia X ⊂ Rn un insieme. Una funzione ϕ : A → Rn , A ⊂ Rd insieme
aperto, è una parametrizzazione di X di classe C k , k ≥ 1, e rango d ∈ {1, 2, . . . , n − 1} se:
i)
ii)
iii)
iv)
ϕ ∈ C k (A; Rn );
ϕ : A → X è biiettiva;
rk(Jϕ (ξ)) = d per ogni ξ ∈ A;
ϕ−1 : X → A è continua.
Diremo in questo caso che X è parametrizzato da ϕ.
Teorema 6.4.3. Siano M ⊂ Rn , k ≥ 1 e 1 ≤ d ≤ n.1. Le seguenti affermazioni sono
equivalenti:
A) M è una sottovarietà differenziabile di Rn di dimensione d e di classe C k ;
B) Per ogni punto x ∈ M esiste r > 0 tale che M ∩ B(x, r) è parametrizzabile con una
parametrizzazione di classe C k e rango d.
Matteo Gallone - Analisi Matematica II
6.5
Ultimi teoremi
Spazio normale e spazio tangente
6.5
55
Spazio normale e spazio tangente
Definizione 6.5.1. Sia M una sottovarietà differenziabile di Rn di dimensione d. Lo
spazio tangente a M in un punto x ∈ M è l’insieme Tx M costituito da tutti i vettori
v ∈ Rn tali che esiste una curva di classe C 1 γ : (−δ, δ) → M tale che γ(0) = x e
γ̇(0) = v.[2]
Teorema 6.5.2. Sia M una sottovarietà differenziabile di Rn di classe C k e di dimensione
d, sia x ∈ M un punto fissato e sia Tx M lo spazio tangente a M in x. Allora:
i) Se f = 0 è un’equazione locale per M in un intorno di x, allora si ha Tx M =
ker(df (x)) = {v ∈ Rn : df (x)v = 0}.
ii) Se ϕ : A → Rn è una parametrizzazione locale di M , A ⊂ Rd aperto e x = ϕ(ξ) con
ξ ∈ A, allora Tx M = im dϕ(ξ) = {dϕ(ξ)w ∈ Rn : w ∈ Rd }.
Dimostrazione. i) Proviamo che Tx M ⊂ ker(df (x)). Sia v ∈ Tx M e consideriamo γ : (−δ, δ) → M differenziabile tale che
γ(0) = x e γ̇(0) = v. Poichè f = 0 è un’equazione locale per M intorno a x, si ha f (γ(t)) = 0 per ogni t ∈ (−δ, δ). Dalla
d
regola per la derivata della funzione composta (Corollario 5.3.3) si ottiene: 0 = dt
f (γ(t)) = df (γ(t))γ̇(t) = df (γ(t))v.
Ovvero v ∈ ker(df (x)).
Proviamo l’inclusione inversa, ovvero ker(df (x)) ⊂ Tx M . Sia v ∈ Rn tale che df (x)v = 0. Si deve costruire una
curva di classe C 1 γ : (−δ, δ) → M tale che γ(0) = x e γ̇(0) = v. Per ipotesi, il rango di df è n − d. Con la notazione
(ξ, y) ∈ Rd × Rn−d , non è restrittivo supporre che risulti det
∂f
∂y
6= 0 in un intorno di x = (ξ̄, ȳ) ∈ M . Per il teorema
del Dini (Teorema 6.2.1) allora esiste una funzione ϕ : B(ξ̄, δ) → B(ȳ, η) di classe C k con δ, η > 0 tale che ξ → (ξ, ϕ(ξ))
∂f (ξ,ϕ(ξ)) −1 ∂f (ξ,ϕ(ξ))
∂ϕ(ξ)
parametrizza localmente M con (ξ̄, ϕ(ξ̄)) = x e Jϕ (ξ) = ∂ξ = −
. Se v = (v1 , v2 ) ∈ Rd × Rn−d ,
∂y
∂ξ
allora ξ̄ + tv1 ∈ B(ξ̄, δ) per t ∈ (−δ, δ). La curva γ(t) = (ξ̄ + tv1 , ϕ(ξ̄ + tv1 )) verifica γ(0) = (ξ̄, ϕ(ξ̄)) = x, e inoltre
∂ϕ(ξ̄)
∂f (x)
∂f (x)
∂f (x) −1 ∂f (x)
γ̇(0) = v1 , ∂ξ v1 . Per ipotesi df (x)v = 0 e cioè ∂ξ v1 + ∂y v2 = 0, da cui si ricava v2 = −
v1 .
∂y
∂ξ
Questo prova che γ̇(0) = v. Qui termina la dimostrazione di i).[3]
Dimostriamo ii). Sia ϕ una parametrizzazione di M intorno a x = ϕ(ξ) e supponiamo che v = dϕ(x)w per un certo
w ∈ Rd . Si sceglia la curva γ(t) = ϕ(ξ + tw) in modo che γ(0) = ϕ(ξ) = x e γ̇(0) = dϕ(ξ)w = v. Questo prova che
im dϕ(ξ) ⊂ Tx M .
D’altra parte dϕ(ξ) ha rango d e dunque im dϕ(ξ) è uno spazio vettoriale di dimensione d. Ma Tx M ha dimensione d,
e dunque deve necessariamente essere im dϕ(ξ) = Tx M .
Definizione 6.5.3. Sia M = {f = 0} una ipersuperficie con f ∈ C 1 (Rn ) e ∇f 6= 0 su M .
Il vettore normalizzato
∇f (x)
N (x) =
|∇f (x)|
con x ∈ M si dice campo normale alla superficie ed è localmente definito in modo unico
a meno del segno.
notazione γ̇(0) è equivalente a dγ
(0).
dt
qui discende che siccome ker(df (x)) è uno spazio vettoriale, anche Tx M è uno spazio vettoriale. Inoltre la sua
dimensione è dim(Tx M ) = dim(ker(df (x))) = dim(Rn ) − dim(im df (x)) = n − (n − d) = d. Ciò vuol dire che lo spazio
tangente di una varietà di dimensione 1 (ad esempio una curva) sarà una retta, di una varietà di dimensione 2 (una superficie)
sarà un piano.
[2] La
[3] Da
Matteo Gallone - Analisi Matematica II
Indice analitico
Abel-Dirichlet, 7
cambiamento di parametro ammissibile, 24
caratterizzazione topologica della continuità, 36
concatenazione di curve, 27
condizione necessaria al primo ordine, 49
condizione necessaria al secondo ordine, 49
condizione sufficente per un minimo locale stretto, 49
confronto asintotico, 9
contrazione, 34
coordinate di una curva, 21
criterio del confronto, 5
criterio del confronto asintotico, 6
curva
chiusa, 22
semplice, 22
con orientazione opposta, 24
continua, 22
continua a tratti, 27
equiorientata, 24
equivalente, 24
in forma cartesiana, 24
parametrizzata, 21
poligonale, 25
regolare, 23
rettificabile, 25
derivata
di una curva, 23
direzionale, 41
parziale, 40
seconda, 41, 46
diffeomorfismo, 51
diffeomorfismo locale, 51
differenziale, 42
direzione, 41
disuguaglianza di Cauchy-Schwarz, 30
equazione delle onde, 47
equazione differenziale, 11
equazione polare di una curva, 24
equazioni parametriche di una curva, 21
equivalenza tra continuità della funzione e continuità delle
coordinate, 31
equivalenza tra continuità e continuità sequenziale, 31
funzione
armonica, 47
continua, 31, 39
derivabile, 40
differenziabile, 42
lipschitziana, 46
omogenea, 50
sequenzialmente continua, 31
uniformemente continua, 40
insieme
aperto, 35
chiuso, 35
connesso, 37
connesso per archi, 38
vincolo, 54
integrale
convergente, 5, 8
convergente assolutamente, 6
curvilineo, 27
divergente, 5
generale, 11
improprio, 5
oscillatore, 7
vettoriale, 25
la composizione di funzioni continue è continua, 36
limite, 39
lunghezza
di una curva, 25
di una poligonale, 25
matrice
definita negativa, 49
definita positiva, 49
Hessiana, 41, 47
Jacobiana, 41
semidefinita negativa, 49
semidefinita positiva, 49
wronskiana, 16
moltiplicatori di Lagrange, 54
multiindice, 48
norma, 29
del differenziale, 45
della convergenza, 30
della convergenza uniforme, 30
euclidea, 21
integrale, 30
operatore di Laplace, 47
palla aperta, 29
parametrizzazione di una sottovarietà, 54
partizione di un insieme, 24
punto
di chiusura, 35
di frontiera, 35
di massimo locale vincolato, 54
di massimo relativo, 48
di minimo locale vincolato, 53
di minimo relativo, 48
di sella, 50
interno, 35
punto fisso, 34
gradiente, 40
Heine-Borel, 37
retta tangente ad una curva, 24
riparametrizzazione di una curva, 24
Matteo Gallone - Analisi Matematica II
somma di curve, 27
somma, prodotto o reciproco di continue è continua, 31
sostegno di una curva, 21
sottovarietà differenziabile, 54
spazio metrico, 29
completo, 32
euclideo, 32
euclideo, 29, 33
limitato, 36
sequenzialmente compatto, 36
spazio normale, 55
spazio normato
di Banach, 32
spazio tangente, 55
successione, 30
convergente, 30
convergente puntualmente, 33
convergente uniformemente, 33
di Cauchy, 32
supporto di una curva, 21
Sviluppo di Taylor, 48
sviluppo di Taylor al secondo ordine, 48
teorema dei valori intermedi, 38
teorema del differenziale totale, 43
teorema del Dini, 53
teorema del valor medio (scalare), 45
teorema del valor medio (vettoriale), 45
teorema delle contrazioni di Banach, 34
teorema dello scambio dei limiti, 34
teorema di Cantor, 40
teorema di inverbilità locale, 51
teorema di rettificabilità delle curve C 1 , 26
teorema di Schwarz, 41
teorema di Weierstrass, 37
teorema sul differenziale della funzione composta, 44
topologia, 36
indotta (o relativa), 37
unicità del limite di una successione, 30
unicità della soluzione del problema di Cauchy, 12, 14
variazione delle costanti, 12, 17
versore tangente, 24