Controllo Digitale - A.A. 2013/2014
Elaborato 3: sintesi per approssimazione e diretta
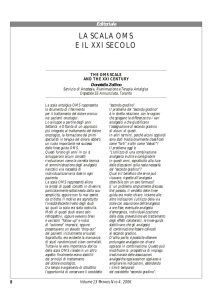
Problema 1. Controllo deadbeat a risposta piatta. Si consideri il classico anello di controllo digitale in figura.
rk
ek
uk
uk
C(z)
_
P (s)
ZOH
yk
y(t)
A/D
Pd (z)
Nel progetto deadbeat, la risposta al gradino analogica y(t) del sistema ad anello chiuso può oscillare per lungo tempo anche
se i suoi campioni yk vanno a regime in un numero finito di passi. Ciò accade in conseguenza del fatto che il segnale di
comando discreto uk ha un andamento oscillante poco smorzato. È quindi possibile evitare completamente questo fenomeno
se si riesce ad imporre che, in corrispondenza ad un gradino in ingresso, non solo l’uscita yk ma anche il segnale di comando
uk vada a regime in un numero finito di passi. In questo caso infatti l’impianto, da un certo istante in poi, riceve un ingresso
costante e quindi la risposta non può oscillare tra successivi istanti di campionamento.
Si consideri la tipica funzione di trasferimento ingresso-uscita ad anello chiuso deadbeat
W0 (z) =
NW (z)
z N +M
con
NW (z) = wM z M + wM −1 z M −1 + . . . + w0
dove l’eccesso poli-zeri (grado relativo) N di W0 (z) è come al solito maggiore o uguale all’eccesso poli-zeri di Pd (z) ed il
polinomio NW (z) a numeratore è scelto per soddisfare eventuali requisiti addizionali (guadagno in continua, errore alla
rampa, ecc.)
1. Mostrare che si ottiene un controllo a risposta al gradino piatta, ovvero in cui sia yk sia uk vanno a regime in un
numero finito di passi, imponendo che l’insieme degli zeri di NW (z) (ovvero degli zeri di W0 (z)) contenga tutti gli zeri
di Pd (z).
2. Assumendo un periodo di campionamento T = 1, progettare un controllore a risposta piatta per l’impianto
P (s) =
s−1
s(s2 + s + 1)
che permetta di inseguire senza errore un riferimento a gradino in un numero minimo di passi.
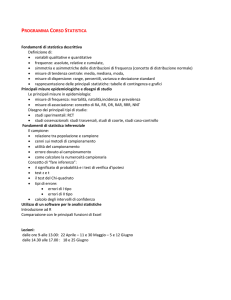
Problema 2. Attenuazione/inseguimento a regime di segnali qualunque. Si consideri il sistema di controllo digitale in
figura, dove il tempo di campionamento vale T .
d(t)
rk
ek
_
C(z)
uk
y(t)
P (s)
ZOH
yk
Si desidera progettare il compensatore C(z) per sintesi diretta, in modo cioè che la funzione di trasferimento ad anello
chiuso W (z) = Y (z)/R(z) sia pari ad una W 0 (z) assegnata. Si supponga che attraverso la scelta della W 0 (z), oltre alla
stabilità interna del sistema ed eventuali altre specifiche, si debba assicurare che l’errore a regime (campionato) prodotto da
un disturbo d(t) di forma nota sia nullo o, equivalentemente, che sia zero l’errore a regime corrispondente ad un riferimento
rk di forma nota.
1. Sia D(z)[R(z)] = Z[d(kT )][Z[ek ]] e si ponga
D(z)[R(z)] =
ND (z)
Qout (z)Qin (z)
dove Qout (z) è un polinomio che ha come zeri tutti i poli di D(z) con modulo maggiore o uguale a 1.
Mostrare che, affinché il problema abbia soluzione, Pd (z) (equivalente campionato con ZOH di P (s)) non può avere
zeri coincidenti con zeri di Qout (z) ed inoltre la W 0 (z) desiderata deve essere scelta in modo che tutti gli zeri di Qout (z)
siano zeri di 1 − W 0 (z). Suggerimento: ricavare la funzione di sensitività S(z) = Y (z)/D(z) = E(z)/R(z) in funzione
di W 0 (z) e imporre le condizioni su di essa affinché yk [ek ] vada a zero in per k → ∞ in corrispondenza di dk [rk ].
2. Posto
P (s) =
1
s
si progetti C(z) in modo che
π t sia nullo,
2T
• la risposta campionata yk ad un riferimento rk a gradino vada a regime in un numero finito e minimo di passi.
• l’errore a regime campionato corrispondente al segnale d(t) = cos
Problema 3. Per compensare la fase di un sistema di controllo alla pulsazione di attraversamento desiderata ωa = 3 rad/s,
si usa la seguente rete anticipatrice
1+s
C(s) =
1 + 0.1s
Supponendo di voler approssimare tale controllore con un equivalente discreto con tempo di campionamento T = 0.25 s,
determinare, per ciascuno dei metodi di approssimazione studiati, il controllore C̄(z) e l’anticipo di fase dato da C̄(z) alla
pulsazione desiderata. Confrontare i valori ottenuti con l’anticipo di fase dato da C(s). Tracciare con Scilab i diagrammi di
Bode dei C̄(z) ottenuti.
Problema 4. Si vuole progettare un regolatore digitale per l’impianto
P (s) =
s2 + 4s + 5
s(s3 + s2 − s − 1)
in modo da soddisfare le seguenti specifiche:
• inseguimento di segnali di riferimento a rampa con errore a regime in valore assoluto non superiore al 5%,
• sovraelongazione della risposta al gradino non superiore al 30%,
• tempo di salita non superiore a 0.3 s.
1. Eseguire il progetto nel continuo.
2. Discretizzare il controllore ottenuto con i vari metodi di approssimazione visti assumendo T = 0.03 s e simulare la
risposta al gradino del sistema ad anello chiuso.
3. Per ciascuno dei metodi, stimare in quale intervallo può variare T affinché il progetto rimanga soddisfacente.
Problema 5. È dato l’impianto
P (s) =
s + 25
s3 − 25s
1. Determinare un compensatore analogico C(s) in modo da soddisfare le seguenti specifiche:
• inseguimento senza errore del gradino,
• inseguimento della rampa unitaria con errore a regime in valore assoluto non superiore a e01 = 0.1,
• modulo della risposta in frequenza alla risonanza non superiore a Mr0 = 5 dB,
• banda passante circa uguale a B30 = 35 rad/s.
2. Determinare una realizzazione a dati campionati del sistema di controllo progettato, secondo lo schema in figura.
Discutere la scelta del tempo di campionamento e del metodo di approssimazione usato (provare quelli conosciuti e se
possibile identificare quello che permette di conservare le specifiche con il tempo di campionamento più alto).
3. Individuare se il sistema ad anello chiuso precedentemente progettato è a poli dominanti. Nel caso, usare la sintesi
diretta nel discreto per imporre al sistema gli stessi poli dominanti e lo stesso errore alla rampa conservando la stabilità
interna. Confrontare le risposte al gradino dei due sistemi di controllo digitali ottenuti.
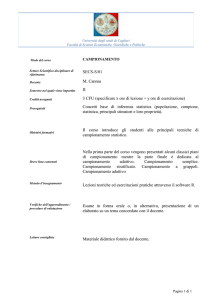
Problema 6. È dato il sistema di controllo in figura dove la funzione di trasferimento dell’impianto vale
P (s) =
1
s
Progettare un controllore C(z) in modo che l’errore a regime sull’uscita campionata yk dovuto ad un disturbo sul comando
du (t) a gradino sia nullo.
Suggerimento: dimostrare che la seconda specifica impone di posizionare un polo del controllore in un punto ben determinato,
successivamente si può utilizzare ad esempio il luogo delle radici.
du (t)
rk
ek
_
C(z)
dy (t)
yk
uk
ZOH
P (s)
A/D
Problema 7.
Si desidera progettare un sistema di controllo digitale in retroazione, con compensatore lineare C(z),
passo di campionamento T e ricostruttore di ordine zero, per la regolazione dell’orientazione θ(t) di un’antenna satellitare.
L’attuazione viene effettuata mediante un motore a corrente continua il quale, in corrispondenza di una tensione di comando
v(t), genera una coppia motrice CM (t) = KM v(t). La dinamica dell’antenna è data dall’equazione
J θ̈(t) = −B θ̇(t) + CM (t) + Cd (t)
dove J è il momento d’inerzia dell’antenna, B il coefficiente di attrito viscoso e Cd (t) una coppia di disturbo dovuta al vento.
Siano KM = 2 N m/V , J = 4 kg m2 , B = 1 kg m/s.
1. Determinare la struttura ed il guadagno di Bode del compensatore C(z) in modo che, ad anello chiuso, l’errore a
regime sulla posizione dovuto all’azione di una coppia di disturbo costante Cd (t) = Cd sia non superiore ad un valore
θd assegnato.
2. Progettare C(z) in modo che
• l’errore a regime di inseguimento di una posizione di riferimento θ0 costante sia nullo
• l’errore di posizione a regime corrispondente ad una coppia di disturbo di valore Cd = 1 N m sia non superiore a
θd = 0.1 rad
• la sovraelongazione della risposta al gradino sia non superiore al 30%
• il tempo di salita della risposta al gradino sia non superiore a 0.7 s.
Effettuare il progetto mediante approssimazione con un’opportuna scelta del tempo di campionamento.
3. Ripetere il progetto con le specifiche del punto 2 impiegando la sintesi diretta e scegliendo opportunamente il tempo
di campionamento.
4. Supponendo fissato T , progettare C(z) in modo che la risposta al gradino campionata del sistema ad anello chiuso vada
a regime in un numero finito e minimo di passi, evitando se possibile fenomeni di oscillazione nel segnale di comando.
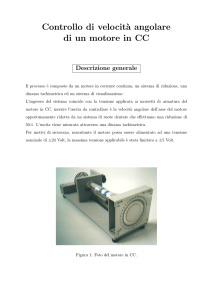
Problema 8. È dato il sistema di controllo in figura, dove la funzione di trasferimento dell’impianto vale
P (s) =
1 − τ s 1 + 0.05s
1 + τs 1 + s
Si desidera progettare il regolatore digitale C(z) in modo da soddisfare le seguenti specifiche:
• sistema di controllo internamente stabile,
• errore a regime di inseguimento al gradino nullo,
• errore a regime di inseguimento alla rampa unitaria non superiore a 0.1,
• sovraelongazione della risposta al gradino non superiore al 20%,
• tempo di salita della risposta al gradino non superiore a 0.4 secondi.
Il problema è disponibile nella versione soft, ponendo τ = 0, e nella versione hard, ponendo τ = 0.05.
1. Eseguire il progetto per sintesi diretta nel discreto.
2. Eseguire il progetto per approssimazione di un opportuno controllore analogico.
3. Giustificare in ciascuno dei casi la scelta del passo di campionamento.
4. Verificare il soddisfacimento delle specifiche mediante opportune simulazioni e riportare i relativi grafici.
5. Confrontare i due progetti ottenuti in termini di “costo”, ovvero di complessità realizzativa del controllore e di velocità
di campionamento richiesta.
r(t)
e(t)
ek
C(z)
_
y(t)
ū(t)
uk
P (s)
ZOH
Problema 9. È dato il sistema di controllo digitale in figura, dove il tempo di campionamento vale T .
d1 (t)
rk
ek
_
uk
C(z)
ZOH
1
s
y(t)
d2 (t)
1. Determinare la funzione di trasferimento del regolatore C(z) in modo che
• il sistema sia internamente stabile
• gli errori a regime corrispondenti a segnali di riferimento rk a gradino ed a rampa siano nulli
• l’errore ek di inseguimento al gradino vada a zero in un numero finito e minimo di passi.
2. Con C(z) progettato come sopra, determinare il valore dei campioni dell’uscita in risposta ad un segnale di disturbo
d1 (t) a gradino unitario.
3. Posto T = 1 e con C(z) progettato come sopra, determinare la massima ampiezza del segnale di comando uk in risposta
ad un disturbo sinusoidale d2 (t) di ampiezza unitaria e frequenza variabile, supponendo che non si abbiano fenomeni
di aliasing.