Università degli studi di Perugia
Facoltà di Scienze Matematiche Fisiche e Naturali
Corso di Laurea in Fisica
ENTROPIA DEI BUCHI NERI
Tesi di Laurea in Fisica
a.a. 2006-07
Relatore
Prof.Gianluca Grignani
Laureanda
Agnese Bissi
Indice
1 Nozioni di relatività generale
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . .
1.2 Principio di equivalenza . . . . . . . . . . . . . .
1.3 Tensori . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Covarianza e controvarianza . . . . . . . .
1.3.2 Derivazione covariante . . . . . . . . . . .
1.3.3 Tensore metrico e tensore energia-impulso
1.3.4 Principio di covarianza generale . . . . . .
1.4 Curvatura . . . . . . . . . . . . . . . . . . . . . .
1.5 Equazioni di campo . . . . . . . . . . . . . . . . .
1.6 Soluzione di Schwarzschild . . . . . . . . . . . . .
1.7 Teorema di Birkhoff . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
3
6
6
6
6
8
9
12
14
16
2 Termodinamica dei buchi neri
2.1 Singolarità dello spazio-tempo . . . . . .
2.2 Diagramma di Penrose . . . . . . . . . .
2.3 Teorema dell’assenza di peli . . . . . . .
2.4 Leggi della termodinamica dei buchi neri
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
19
23
23
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Capitolo 1
Nozioni di relatività generale
1.1
Introduzione
La descrizione del mondo fisico secondo la meccanica classica ha bisogno del
concetto di sistema di riferimento inerziale. Tutti i sistemi inerziali si equivalgono ma essi risultano privilegiati rispetto a sistemi di riferimento in stati
di moto diversi. Occorre estendere il principio di relatività a sistemi di riferimento che non sono in moto uniforme gli uni rispetto agli altri. C’è un’altra
stranezza, o meglio, una coincidenza alla quale la teoria classica non sa dare
una spiegazione. La costante m che compare nel secondo principio della dinamica (F = ma),
è anche la grandezza alla quale è proporzionale la forza
gravitazionale F = G Mr2m . Questo fatto che in meccanica classica risulta
essere solamente un’uguaglianza numerica diventa invece un assioma nella
teoria della relatività generale e viene sviluppato in tutte le sue conseguenze.
1.2
Principio di equivalenza
Il principio di equivalenza, come già accennato, è il nucleo fondamentale della
relatività generale, anzi si può affermare che in un certo senso esso contiene
l’intera teoria. Ne diamo ora una delle tante formulazioni possibili:
Ad ogni punto dello spazio tempo in un campo gravitazionale arbitrario è possibile associare un sistema di coordinate localmente inerziale tale che, in un
intorno sufficientemente piccolo del punto in questione, le leggi della natura
hanno la stessa forma che in un sistema inerziale di coordinate cartesiane in
assenza di gravità.
Esso discende da una considerazione in fondo piuttosto semplice. Immaginiamo di essere nello spazio aperto in caduta libera verso la terra magari in
compagnia di qualche altro oggetto, è evidente che in tali condizioni si sper-
1.2 Principio di equivalenza
4
imenterà l’assenza di peso, si avrà la sensazione che nessuna forza agisca su
di noi, e anche il nostro compagno di viaggio ci seguirà senza spostarsi di un
millimetro da noi indipendentemente dalla sua massa. Questo sarà vero fino a
quando non cominceranno a comparire le cosiddette forze mareali, dovute alla particolare struttura del campo che tenderanno a farci avvicinare il nostro
amico. Ma per un tratto sufficientemente piccolo di spazio-tempo, per noi,
sarà come essere assolutamente immobili l’uno rispetto all’altro nella totale
assenza di forze esterne o interazioni reciproche. Per cui potrebbero essere
applicate benissimo le leggi della relatività ristretta. Vediamo ora come dal
principio di equivalenza sia possibile dare una forma nuova alle leggi fisiche.
Consideriamo un corpo che si muove all’interno di un campo gravitazionale
qualunque e in assenza di altre interazioni, nel sistema inerziale che in base
al principio di equivalenza è sempre possibile scegliere l’equazione del moto
avrà la forma:
d2 ξ α
=0
(1.1)
dτ 2
dove dξ α sono le quattro coordinate del sistema inerziale e dτ è il tempo
proprio:
dτ 2 = −ηαβ dξ α dξ β
(1.2)
In questa notazione α e β possono assumere i valori: 0, 1, 2, 3 e ηαβ è un
tensore definito nel seguente modo (tensore di Minkowski):
ηαβ =
−1 0
0
0
0 +1 0
0
0
0 +1 0
0
0
0 +1
(1.3)
Il tensore di Minkowski è anche usato per classificare i vettori. Se la norma
di tale tensore ηαα è negativa allora il vettore α si dice di tipo tempo, se
è positiva di tipo spazio e se ηαα = 0 allora α é nullo. Inoltre se la prima
componente di ciascun tipo di vettore è positiva allora si dice che sono di tipo
tempo, spazio o nullo futuro altrimenti sono di tipo tempo, spazio o nullo
passato. I vettori nulli formano un doppio cono che separa i vettori di tipo
tempo da quelli di tipo spazio, infatti i primi giacciono all’interno del cono
mentre gli altri sono esterni.
Supponiamo ora di voler ricavare l’equazione del moto in un sistema di
coordinate generico (anche non inerziale) xµ . Ovviamente ci saranno delle
equazioni di trasformazione che permettono di passare da un sistema all’altro:
xµ = xµ (ξ α ). Quindi l’equazione (1.1) si trasforma nel seguente modo:
µ
ν
d2 xα
λ dx dx
+
Γ
=0
µν
dτ 2
dτ dτ
(1.4)
1.2 Principio di equivalenza
5
dove Γλµν è il simbolo di Christoffel di seconda specie altrimenti detto connessione affine:
∂xλ ∂ 2 ξ α
Γλµν ≡ α µ ν
(1.5)
∂ξ ∂x ∂x
È facile notare che essa non segue quindi l’algebra tensoriale. La soluzione
di questa equazione è la traiettoria dell’oggetto nelle nuove coordinate in
funzione del parametro τ , xµ = xµ (τ ). Si può esprimere anche il tempo
proprio in funzione delle nuove coordinate:
dτ 2 = −gµν dxµ dxν
(1.6)
dove gµν è il tensore metrico relativo alle nuove coordinate:
gµν
∂ξ α ∂ξ β
≡
ηαβ
∂xµ ∂xν
(1.7)
Per mettere in evidenza il legame tra il tensore metrico e la connessione affine
è sufficiente derivare il primo rispetto a xλ , risolvendo poi rispetto a Γλµν si
ottiene:
(
)
∂gµλ
1 νσ ∂gµν ∂gλν
σ
+
−
Γλµ = g
(1.8)
2
∂xλ
∂xµ
∂xν
L’equazione (1.4) si riduce all’equazione di Newton in assenza di gravità,
ovvero quando il tensore metrico coincide con il tensore di Minkowski e la
connessione affine è nulla. Questo fatto ci dice molto sulla natura della connessione affine. Per ora possiamo affermare che di fatto essa è strettamente
legata al campo gravitazionale all’interno del quale avviene il moto. Cerchiamo ora di focalizzare l’attenzione su una fondamentale differenza tra
l’equazione (1.1) e l’equazione (1.4). Mentre la prima ha valenza soltanto in
una regione infinitesima dello spazio-tempo intorno all’oggetto, la seconda,
essendo completamente arbitraria la scelta del sistema di coordinate, vale per
intervalli finiti. Il problema è che l’equazione (1.4) da sola risolve il problema
del moto dei corpi solo in apparenza. Si vorrebbe calcolare la traiettoria di un
corpo in un campo gravitazionale generato da una qualunque distribuzione di
materia-energia. È evidente che a questo stadio ciò non ci è possibile poiché
non conosciamo l’espressione del simbolo di Christoffel. Quello che occorre
fare è quindi cercare un’equazione che data una distribuzione di materiaenergia permetta di ricavare il tensore metrico e quindi la connessione affine.
Prima di affrontare questo problema è necessario introdurre alcuni importanti
concetti.
1.3 Tensori
1.3
1.3.1
6
Tensori
Covarianza e controvarianza
Per vettore covariante si intende un vettore che, data una trasformazione di
coordinate xµ → x0µ , si trasforma nel seguente modo:
∂xν
Uν
=
∂x0µ
Uµ0
(1.9)
Per vettore controvariante si intende un vettore che, data una trasformazione
di coordinate xµ → x0µ si trasforma nel seguente modo:
U 0µ =
∂x0µ ν
U
∂xν
(1.10)
In modo in tutto e per tutto analogo possiamo definire tensori covarianti
e controvarianti. Esistono anche tensori misti i cui elementi covarianti si
trasformano secondo la (1.9) mentre quelli controvarianti seguono la (1.10):
Tν0µ =
1.3.2
∂x0µ ∂xρ κ
T
∂xκ ∂x0ν ρ
(1.11)
Derivazione covariante
Il concetto di derivata covariante consente di estendere l’usuale concettto di
µ
) di un
derivata al calcolo tensoriale. In generale la derivata semplice ( ∂V
∂xλ
vettore non è un vettore infatti compare un termine non lineare. Per ovviare
a ciò si somma alla derivata il prodotto tra tale vettore e la connessione affine,
che contiene lo stesso termine non lineare ma di segno opposto. In tal modo
si ottiene la derivata covariante, che evidentemente è un vettore:
V;λµ ≡
∂V µ
+ Γµλκ V κ
∂xλ
(1.12)
Da questa espressione si evince che qualora il simbolo di Christoffel sia nullo,
cioè in assenza di campo gravitazionale, la derivata covariante coincide con
∂V µ
. Questo anticipa un’ulteriore formulazione del principio di equivalenza: si
∂xλ
può sostituire nelle equazioni valide in assenza di campo gravitazionale gµν a
µ
ηαβ e V;λµ a ∂V
. Con questi accorgimenti (Principio di covarianza generale) le
∂xλ
nuove equazioni descriveranno il moto nel campo gravitazionale considerato.
1.3.3
Tensore metrico e tensore energia-impulso
Parliamo ora dei due tensori più ricorrenti in relatività generale.
1.3 Tensori
7
• Tensore metrico. Dall’invarianza di ds2 (ds2 = gµν dxµ dxν ) deriva
che gµν è un tensore simmetrico covariante. Vale inoltre la seguente
relazione:
gαµ g µβ = δαβ
(1.13)
Attraverso tale relazione è possibile da tensori con indici a carattere
covariante ottenere tensori con indici a carattere covariante e viceversa:
Aµ = g µα Aα
Aµ = gµα Aα
Tµσ = g σν Tµν
(1.14a)
(1.14b)
(1.14c)
Definiamo ora il determinante del tensore metrico:
g ≡ −Detg µν
(1.15)
La legge di trasformazione dell’elemento di volume è:
Z
dτ 0 =
dx1 dx2 dx3 dx4
(1.16)
In base al noto teorema di Jacobi,
0
dτ =
∂x0σ dτ
∂xµ (1.17)
moltiplicando le due ultime equazioni si ha
q
g 0 dτ 0 =
√
gdτ
(1.18)
Inoltre le componenti del tensore metrico descrivono sia le relazioni
metriche del continuo spazio-temporale sia il campo gravitazionale.
Un tensore metrico associato ad una varietà differenziabile, che nel
nostro caso è il continuo spazio-temporale, ne individua la struttura
geometrica; quindi la trasformazione di coordinate dal sistema localmente inerziale ad uno generico di fatto rappresenta la modificazione
indotta dalla materia-energia allo spazio-tempo. Questa modificazione
è l’espressione del campo gravitazionale. La presenza di g nella legge
di trasformazione dell’elemento di volume, il quale non è invariante, è
giustificata da quanto detto sopra.
Esistono dei vettori di campo, detti di Killing, che in una varietà di
Riemann sono i generatori infinitesimi delle isometrie. Tali diffeomorfismi conservano la metrica, cioè la metrica trasformata è in ogni punto
1.3 Tensori
8
uguale a quella di partenza, e i prodotti scalari. Inoltre ogni vettore di
questo tipo deve soddisfare l’equazione di Killing:
Ka;b + Kb;a = 0
In generale se uno spazio non possiede alcuna simmetria, non esistono
vettori di Killing poiché le proprietà di simmetria di uno spazio sono
completamente caratterizzate da un gruppo di isometrie. Nel caso della metrica di Schwarzschild, poiché è indipendente dal tempo, esiste
∂
).
sicuramente un vettore di Killing di tipo tempo (κν ∂a = ∂t
• Tensore energia-impulso. Definiamo ora un tensore del secondo ordine Tµν che riassume la densità di energia del campo elettromagnetico
e della quantità di moto. In un certo senso è l’analogo del quadrivettore densità di corrente, il carattere tensoriale di Tµν è dovuto al
fatto che mentre la carica elettrica è uno scalare, il quadri-impulso è un
quadrivettore. Poiché quantità di moto e energia devono conservarsi,
la divergenza di Tµν deve essere nulla. Analogamente a quanto accade
per la derivazione, si può definire una divergenza covariante in questo
modo:
∂V µ
+ Γµµλ V λ
(1.19)
V;µµ =
µ
∂x
Quindi Tµν deve soddisfare la seguente equazione:
0=
∂T µν
+ Γµµλ Tµλ
∂xµ
(1.20)
Da questa equazione si deduce che non è possibile parlare di legge di
conservazione di energia e quantità di moto solamente per il campo elettromagnetico o gravitazionale per regioni estese poiché è presente il secondo termine che rende impossibile dedurre l’esistenza di un’equazione
integrale associata. Questo perché il campo gravitazionale trasferisce
energia e impulso alla materia esercitando su di essa delle forze e quindi trasferendo l’energia. Questo aspetto verrà chiarito dalla presenza di
Tµν nell’equazione di Einstein.
1.3.4
Principio di covarianza generale
Come già introdotto esiste un’altra possibile formulazione del principio di
equivalenza detto appunto principio di covarianza generale, che afferma:
Un’equazione resta invariata in relatività generale se soddisfa le due seguenti
condizioni:
1.4 Curvatura
9
1. L’equazione è valida in assenza di gravità cioè è in accordo con le leggi
della relatività speciale quando il tensore metrico è uguale al tensore di
Minkowski e quando la connessione affine è nulla.
2. L’equazione è covariante, preserva cioè la sua forma sotto un generico
cambiamento di coordinate x → x0 .
Questa formulazione è equivalente a quella enunciata all’inizio del capitolo
in quanto dalla seconda condizione si deduce che l’equazione resta valida in
ogni sistema di coordinate e dalla prima che è sempre possibile scegliere un
sistema di coordinate localmente inerziale in cui gli effetti della gravitazione
sono assenti.
1.4
Curvatura
Prima di parlare di curvatura è necessario introdurre il concetto di geodetica
come traiettoria di un punto nello spazio-tempo. Per far ciò consideriamo
l’elemento lineare ds che è una grandezza invariante, cioè indipendente dal
sistema di coordinate scelto. La linea tracciata
tra due punti P1 e P2 del conR
tinuo quadridimensionale per la quale ds sia un estremo ha quindi carattere
invariante. Introducendo un principio variazionale:
δ
(Z
P2
P1
)
ds = δ
(Z
P2 q
P1
)
gµν dxµ dxν
=0
(1.21)
si ottengono quattro equazioni differenziali che determinano tale geodetica.
Introducendo un parametro λ che identifica le varie curve passanti per P1 e
P2 e integrando per parti, si ottiene l’equazione di questa curva:
µ
ν
d2 xα
λ dx dx
+
Γ
=0
µν
ds2
ds ds
(1.22)
Una geodetica oltre ad essere la curva di minima lunghezza rappresenta anche
il percorso di minima energia poiché verifica anche il principio variazionale
per il tensore energia-impulso. Come si può notare l’equazione delle geodetiche non è altro che l’equazione del moto (1.4) nel parametro ds. Più avanti
comprenderemo meglio il significato di questa apparente coincidenza.
Ora si vuole cercare un tensore ottenuto mediante derivazione covariante del
tensore metrico. Ricordando che la connessione affine non è un tensore perché
si trasforma per un cambiamento di coordinate nel seguente modo:
Γλµν =
∂xλ ∂x0ρ ∂x0σ 0τ
∂xλ ∂ 2 x0τ
Γ
+
∂x0τ ∂xµ ∂xν ρσ ∂x0τ ∂xµ ∂xν
(1.23)
1.4 Curvatura
10
ricaviamo il termine non lineare e lo deriviamo rispetto ad xκ . Cambiando gli
indici e sottraendo le relative equazioni si ottiene la regola di trasformazione
per il tensore del quarto ordine cercato:
0τ
Rρση
=
∂x0τ ∂xµ ∂xν ∂xκ λ
R
∂xλ ∂x0ρ ∂x0σ ∂x0η µνκ
(1.24)
dove
∂Γλµν
∂Γλµκ
(1.25)
−
+ Γηµν Γλκη − Γηµκ Γλνη
∂xκ
∂xν
è detto tensore di curvatura di Riemann-Christoffel.
L’importanza del tensore di curvatura risiede nel fatto che se lo spazio-tempo
è tale che esiste un sistema di riferimento rispetto al quale le componenti del
tensore metrico sono costanti allora si annullano anche tutte le componenti
del tensore di curvatura. Se scegliamo un qualunque altro sistema di coordinate rispetto al quale le componenti gµν non sono più costanti le nuove
λ
componenti di Rµνκ
saranno ancora nulle a causa del loro carattere tensoriale. Da ciò si deduce che l’annullarsi del tensore di Riemann è condizione
necessaria affinché in un appropriato sistema di riferimento le componenti
del tensore metrico possano essere costanti, cioè ci troviamo nelle condizioni
in cui la teoria della relatività ristretta è valida per una regione finita del
continuo spazio-temporale.
Il tensore di curvatura può essere scritto in forma completamente covariante
usando la (1.14c):
σ
Rλµνκ = gλσ Rµνκ
(1.26)
λ
≡
Rµνκ
Possiamo contrarre il tensore di Riemann per ottenere un tensore simmetrico
del secondo ordine detto anche tensore di Ricci:
Rµκ = g λν Rλµνκ
(1.27)
A partire sempre dal tensore di curvatura possiamo costruire uno scalare:
R ≡ −g λν g µκ Rµλνκ = g λν g µκ Rλµνκ
(1.28)
Esplicitando la connessione affine e l’equazione sopra si possono ricavare le
seguenti proprietà algebriche del tensore di Riemann-Christoffel:
• Simmetria:
Rλµνκ = Rνκλµ
(1.29)
Rλµνκ = −Rµλνκ = −Rλµκν = +Rµλκν
(1.30)
• Antisimmetria:
1.4 Curvatura
11
• Ciclicità:
Rλµνκ + Rλκµν + Rλνκµ = 0
(1.31)
Rλµνκ;η + Rλµην;κ + Rλµκη;ν = 0
(1.32)
• Identità di Bianchi:
dove si è considerata la derivata covariante in un certo punto x in un
sistema di riferimento localmente inerziale in cui ovviamente la connessione affine è nulla.
In generale possiamo considerare uno spazio N-dimensionale. In questo contesto è importante vedere quante sono le componenti indipendenti del tensore
di Riemann. Alla luce delle regole di simmetria elencate sopra, si può notare
che tale tensore è simmetrico rispetto alla coppia di coordinate λµ e νκ mentre è completamente antisimmetrica la somma Rλµνκ + Rλκµν + Rλνκµ , quindi
1
N 2 (N 2 − 1)componenti indipendenti. Le CN , che
in totale si hanno CN = 12
dipendono dal sistema di coordinate scelto, descrivono la curvatura di uno
spazio N-dimensionale generico. Per eliminare questa dipendenza dalla scelta
delle coordinate si considerano gli scalari, che sono degli invarianti, costruiti
a partire dal tensore metrico e da quello di Riemann. Il numero di questi
1
N (N − 1)(N − 2)(N + 3) se N ≥ 3. Per N=2 abbiamo uno
scalari è pari a 12
scalare che è proprio quello già definito dalla (1.28). Per evidenziare meglio
questi invarianti si introduce il tensore di Weyl o tensore conforme Cλµνκ che
è la differenza tra il tensore di Riemann e quello di Ricci:
Cλµνκ = Rλµνκ −
1
(gλν Rµκ − gλκ Rµν − gµν Rλκ + gµκ Rλν ) + (1.33)
N −2
R
(gλν gµκ − gλκ gµν )
(N − 1)(N − 2)
Il tensore di Weyl ha le stesse proprietà algebriche di quello di Riemann, inoltre è invariante per trasformazioni conformi della metrica infatti se Cλµνκ =
0 allora lo spazio considerato è euclideo. Ritornando alla definizione, è importante notare un altro aspetto: il tensore di Weyl rappresenta i gradi di
libertà gravitazionali. Questo perchè ai gradi di libertà totali (il tensore di
Riemann) sono stati sottratti quelli di sorgente(il tensore di Ricci). Infatti il
tensore di Ricci è dato dall’equazione di Einstein (Rµν − 21 gµν R = −8πGTµν )
e quindi il tensore di Weyl per come è definito è la parte di curvatura che
non è determinata localmente dalla distribuzione di materia. Inoltre Rλµνκ
misura la diminuzione di volume che è l’effetto dell’accelerazione sulla curvatura dello spazio-tempo. Da queste considerazioni si può vedere anche che
il tensore di Weyl descrive gli effetti di marea della gravità.
1.5 Equazioni di campo
1.5
12
Equazioni di campo
A questo punto siamo in grado di ricavare le equazioni che, dato il tensore
energia impulso Tµν , permettono almeno in teoria di calcolare le componenti del tensore metrico gµν . Per prima cosa ci serve l’espressione del tensore
metrico in funzione del potenziale newtoniano. Uguagliando la (1.4) nell’ approssimazione di campo debole (gαβ = ηαβ + hαβ con |hαβ | 1) e stazionario
(tutte le derivate di gµν si annullano) con la seconda legge della dinamica e
tenendo conto della (1.8):
1
d2 x
= ∇h00 = −∇φ ⇒ h00 = −2φ + cost
2
dt
2
(1.34)
imponendo che all’infinito h00 e il potenziale siano nulli si ottiene:
h00 = −2φ ⇒ g00 = −(1 + 2φ)
(1.35)
A questo punto utilizzeremo come modello l’equazione di Poisson della teoria
newtoniana:
∇2 φ = 4πGρ
(1.36)
dove G è la costante di Newton, φ il potenziale newtoniano e ρ la densità di
massa. Ora si tratta di estendere l’equazione di Poisson al caso relativistico.
La densità di massa è la 00-componente del tensore energia-impulso T00 = ρ.
Sostituendo la (1.34) nella (1.35) si ottiene:
∇2 g00 = −8πGT00
(1.37)
Visto che questa equazione non è Lorentz invariante è lecito supporre che
esista un tensore Gµν (combinazione lineare del tensore metrico e delle sue
derivate) che soddisfi la seguente:
Gµν = −8πGTµν
(1.38)
Questa equazione supposta valida solo per campi statici e deboli in realtà
assume valenza generale grazie al principio di equivalenza.
Per individuare il tensore Gµν deve soddisfare cinque condizioni:
1. Gµν è un tensore per definizione.
2. Gµν contiene solo termini con derivate fino al secondo ordine del tensore
metrico, lineari nel secondo ordine e quadratici nel primo ordine.
3. Poiché Tµν é simmetrico allora anche Gµν lo é.
1.5 Equazioni di campo
13
4. Siccome Tµν si conserva nel senso della differenziazione covariante allora
Gµν;µ = 0
(1.39)
5. Per campi deboli e stazionari prodotti da materia non relativistica la
00-componente della (1.37) si riduce a
G00 ∼
= ∇2 g00
(1.40)
In base alle prime due condizioni il tensore Gµν sarà necessariamente del tipo:
Gµν = ARµν + Bgµν R
(1.41)
dove A e B sono delle costanti. La terza condizione non ci dice nulla di nuovo.
In base alla quarta condizione,usando l’identità di Bianchi, si avrà invece :
Gµν;µ
A
A
+ B R;ν = 0 ⇒ R;ν = 0 ∪
+B =0
=
2
2
(1.42)
siccome R;ν = 0 presupporrebbe una distribuzione non omogenea di materia,
questa ipotesi è da scartare. Quindi B = − A2 :
Gµν = A Rµν
1
− gµν R
2
(1.43)
La costante A si può determinare imponendo la quinta condizione tenendo
presente che nella (1.26) le derivate temporali sono tutte nulle e risulta A = 1.
Quindi siamo ora in grado di scrivere l’equazione di campo di Einstein:
1
Rµν − gµν R = −8πGTµν
2
(1.44)
Ricordando la (1.28) si ottiene una forma contratta dell’equazione di Einstein:
R = 8πGTµµ
(1.45)
La (1.44) è un’equazione tensoriale. Di fatto sarebbero sedici equazioni ma,
data la simmetria del tensore metrico, se ne ottengono dieci indipendenti. La
soluzione di queste equazioni alle derivate parziali contiene delle funzioni arbitrarie per cui, analogamente a quanto avviene con le equazioni di Maxwell,
si può imporre una scelta delle coordinate che le semplifichi. Una di queste,
detta delle coordinate armoniche, è la seguente:
Γλ ≡ g µν Γλµν = 0
(1.46)
Il tensore energia-impulso può essere separato in due componenti, una riferita
alla materia e una al campo gravitazionale stesso.
1.6 Soluzione di Schwarzschild
1.6
14
Soluzione di Schwarzschild
Prima di risolvere l’equzione di Einstein per il caso più semplice, si vuole
scrivere il più generale tensore metrico associato a un campo gravitazionale
statico ed isotropo e a simmetria sferica cioè tale che il tempo proprio dipenda
solo da gli invarianti rotazionali dx2 , x · dx e x2 :
dτ 2 = F (r)dt2 − 2E(r)dtx · dx − D(r)(x · dx)2 − C(r)dx2
1
(1.47)
dove F, E, D, C sono funzioni non note di r r ≡ (x · x) 2 .
Si passa a coordinate polari:
x1 = r sin θ cos φ
x2 = r sin θ sin φ
3
x = r cos θ
(1.48)
si ricavano i differenziali:
dx1 = sin θ cos φ dr + r cos θ cos φ dθ − r sin θ sin φ dφ
dx2 = sin θ sin φ dr + r cos θ sin φ dθ + r sin θ cos φ dφ
dx3 = cos θ dr − r sin θ dθ
(1.49)
e quindi
x · dx = rdr
(x · dx)2 = r2 dr2
2
dx = dr2 + dθ2 + dφ2 r2 sin2 θ
Sfruttando questi risultati e sostituendo il tempo proprio diventa:
dτ 2 = F (r)dt2 −2E(r)dtrdr−D(r)r2 dr2 −C(r)dr2 +dθ2 +dφ2 r2 sin2 θ (1.50)
Definendo una nuova coordinata temporale t0 = t + Φ(r) che permette di
eliminare gli elementi non diagonali gtr e introducendo un nuovo raggio r02 =
C(r)r2 , si ottiene in forma standard il tempo proprio:
dτ 2 = B(r0 )dt2 − A(r)dr02 − r02 (dθ2 + sin2 θdφ2 )
2
2
(r)
r
D(r) + EF (r)
1+
dove B(r0 ) ≡ F (r) e A(r0 ) ≡ 1 + C(r)
Dalla (1.51) si può ricavare il tensore metrico che sarà:
grr = A(r)
gθθ = r2
gφφ = r2 sin2 θ
gtt = −B(r)
r dC(r)
2C(r) dr
(1.51)
−2
.
(1.52)
1.6 Soluzione di Schwarzschild
15
Ora combinando la (1.8) e la (1.52) si calcolano le componenti della connessione affine e, visto che gµν è diagonale, le uniche non nulle sono:
Γrrr = 12 A−1 (r)
1 dB(r)
Γrtt = − 2A(r)
dr
Γφrφ = Γφφr =
2
r
Γrθθ = − A(r)
Γθrθ = Γθθr =
sin θ
Γrφφ = − r A(r)
1
r
Γθφφ = − sin θcosθ
Γφθφ = Γφφθ = cot θ Γttr = Γtrt =
1
r
(1.53)
1 dB(r)
2B(r) dr
Per risolvere l’equazione di Einstein abbiamo bisogno anche del tensore di
Ricci dato da:
Rµκ =
∂Γλµλ ∂Γλµκ
−
+ Γηµλ Γλκη − Γηµκ Γλλη
κ
λ
∂x
∂x
(1.54)
Facendo le opportune sostituzioni si ottiene che le componenti non nulle del
tensore di Ricci sono:
Rrr =
1 d2 B(r)
2B(r) dr2
Rθθ = −1 +
r
2A(r)
−
1 1 dB(r)
4 B(r) dr
1 dA(r)
+
− A(r)
dr
Rφφ = sin2 θ −1 +
2
r
2A(r)
1 d B(r)
Rtt = − 2A(r)
+
dr2
1 dA(r)
A(r) dr
1 dB(r)
B(r) dr
1 dA(r)
− A(r)
+
dr
1 dB(r)
4A(r) dr
1 dB(r)
B(r) dr
+
+
1 dA(r)
rA(r) dr
−
1
A(r)
1 dB(r)
B(r) dr
1 dA(r)
A(r) dr
+
+
1
A(r)
1 dB(r)
B(r) dr
= sin2 θRθθ
−
1 1 dB(r)
r A(r) dr
(1.55)
Ora siamo in grado di risolvere le equazioni di Einstein nel caso di campo
gravitazionale statico ed isotropo a simmetria sferica nello spazio vuoto, cioè
Rµν = 0. É facile vedere dalla (1.55) che affinchè Rµν = 0 è sufficiente che
siano nulle Rrr ,Rθθ e Rtt . Imponendo questa condizione e sottraendo la prima
alla quarta equazione delle (1.55) si ottiene:
dB(r)
dA(r)
B(r) + A(r)
= 0 ⇒ A(r)B(r) = C
dr
dr
(1.56)
dove C é una costante reale. Sostituendo nella seconda equazione la relazione
tra A e B si ha che
dA(r)
r
+ A2 − A = 0
dr
che è un’equazione differenziale di Bernoulli riconducibile ad una lineare, la
cui soluzione generale è
1
A(r) = 1 +
Hr
−1
1.7 Teorema di Birkhoff
16
Rimane da determinare il valore delle due costanti C ed H. Per grandi valori
di r il campo gravitazionale in questione è debole per cui la componente
temporale del tensore metrico gtt può essere approssimata dalla (1.35). Si
avrá che
2M G
B(r) = 1 −
r
2M G −1
A(r) = 1 −
r
La soluzione di Schwarzschild delle equazioni di Einstein é dunque:
2M G
2M G
dτ = 1 −
dt2 − 1 −
r
r
2
1.7
−1
dr2 − r2 (dθ2 + sin2 θdφ2 )
(1.57)
Teorema di Birkhoff
La staticità della soluzione di Schwarzschild si dimostra non essere necessaria.
Infatti il teorema di Birkhoff afferma che l’unica soluzione a simmetria sferica per le equazioni di Einstein nello spazio vuoto è quella di Schwarzschild.
Questo ci dice anche che, per una distribuzione sferica di massa-energia anche non a riposo, la geometria dello spazio circostante è sempre quella di
Schwarzschild. In particolare, siccome questa geometria è indipendente dal
tempo, lo spazio esterno è a sua volta statico, indipendentemente dallo stato
di quiete o meno della materia che lo genera. È da notare però che questo
teorema non è più valido se la massa che genera il campo ruota su se stessa
perchè in tal caso ci sarebbe una direzione privilegiata, quella dell’asse di
rotazione, per cui non sarebbe più soddisfatta la simmetria sferica. Questo
risultato è utile per spiegare la dinamica di stelle e buchi neri. Ci aiuta anche a comprendere il perchè le onde gravitazionali siano cosı̀ poco intense:
poiché sono delle perturbzioni dello spazio (quindi non statiche) possono essere generate solo dalle piccole asimmetrie delle stelle, approssimativamente
a simmetria sferica, che generano il campo.
Capitolo 2
Termodinamica dei buchi neri
2.1
Singolarità dello spazio-tempo
Una singolarità dello spazio-tempo è un punto in cui il tensore metrico non
è definito o non è opportunamente differenziabile. Questa definizione non è
molto utile perché si potrebbe pensare di escludere i punti singolari e considerare lo spazio-tempo come la varietà restante. Perciò è importante definire
altri concetti. In una varietà con una metrica definita positiva, si può introdurre una funzione distanza ρ(x, y) come il massimo limite inferiore della
lunghezza delle curve da x a y. In questo caso si dice che la varietà ammette
una metrica definita se ogni sequenza di Cauchy converge ad un punto di tale
varietà rispetto alla funzione distanza. Inoltre si definisce geodetica completa ogni geodetica che può essere estesa per qualsiasi valore della connessione
affine. Alla luce di queste definizioni si dice che uno spazio-tempo è singolare
se è di tipo tempo o nullo geodeticamente incompleto e non è una varietà
completa. Si può notare che l’incompletezza geodetica permette ad una particella di avere un inizio o una fine in un intervallo finito del tempo proprio.
Per cui si prevedono singolarità in due casi: nel passato e nel futuro. Le prime,
dette anche singolarità iniziali, riguardano l’inizio dell’universo, il Big Bang
da cui i segnali possono uscire ma non entrare. In questo caso la curvatura
di Weyl sará molto piccola come l’entropia. Le singolarità nel futuro, o finali,
sono quelle dei buchi neri, in cui i segnali possono entrare ma non uscire, la
curvatura di Weyl è quindi infinita quando si raggiunge tale singolarità.
Esistono anche altri tipi di singolarità oltre quelle di metrica sopra descritte,
le cosiddette singolaritá di coordinate. In tal caso effettuando un cambiamento di coordinate standard si può rendere la metrica regolare. Per capire
meglio questo aspetto analizziamo la (1.57). È evidente che abbiamo due singolarità: una in r = 0, l’altra in corrispondenza del raggio di Schwarzschild
2.1 Singolarità dello spazio-tempo
18
(r = Rs ≡ 2M G). Ora bisogna capire la natura di queste due singolarità. La
soluzione di Schwarzschild risolve l’equazione Rµν = 0 quindi risulta anche
R = 0 e Rµν Rµν = 0. Si possono considerare però scalari di ordine superiore
non nulli, per esempio quello quadratico di Kretschmann:
K = Rµνρσ Rµνρσ =
48M 2 cos2 θ
+ ...
r6
Poiché questo invariante (indipendente dal sistema di riferimento scelto) non
è regolare in r = 0, sicuramente ci sarà in questo punto una singolaritá di
metrica, però non si può dire nulla sulla singolarità in r = Rs .
Se si considera un osservatore nel campo di Schwarzschild con massa a riposo
m le sue equazioni del moto si scrivono:
gαβ pα pβ = m2 c2
α
é il suo quadrimomento e τ è il tempo proprio. L’energia
dove pα = −m dx
dτ
totale dell’osservatore sarà:
E = −p0 c
Usando la conservazione dell’energia si ha un’equazione in pr , quindi un’equazione differenziale in r. Integrando tra 0 e Rs si ottiene il tempo che
l’osservatore impiega per andare dalla singolarità di coordinate in r = 0 a
Rs . Questo intervallo di tempo proprio è finito, ciò significa che non succede
niente di non fisico in r = Rs . Questa è quindi una singolarità di coordinate,
basta scegliere un sistema di coordinate (ad esempio quelle di EddingtonFinkelestein o di Kruskal-Szekeres) non singolari in questo punto per avere
una metrica regolare.
Il sistema di coordinate che copre l’intera varietà spazio temporale nella metrica di Schwarzschild é quello di Kruskal-Szekeres. Si definiscono 2 nuove
coordinate in tal modo:
1
2
r
t
r
− 1 e 4M G sinh
T =
2M G
4M G
1
2
r
r
t
R=
− 1 e 4M G cosh
2M G
4M G
(2.1)
(2.2)
per r > 2M G e
1
2
r
r
t
T = 1−
e 4M G sinh
2M G
4M G
1
2
r
r
t
R= 1−
e 4M G cosh
2M G
4M G
(2.3)
(2.4)
2.2 Diagramma di Penrose
19
per r < 2M G.
In questo sistema di coordinate l’espressione della metrica (che è singolare
solo in r = 0) è la seguente:
dτ 2 =
32G3 M 3 −r 2
e 2M G dT − dR2 r2 (dθ2 + sin2 θdφ2 )
r
1
(2.5)
r
dove T 2 − R2 = 1 − 2Mr G 2 e 2M G , si vede quindi che t è una coordinata
angolare ed r nello spazio T,R è rappresentata da delle iperboli.
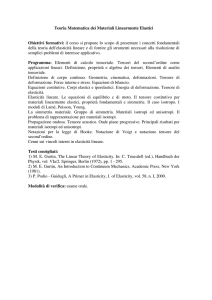
Figura 2.1: Coodinate di Kruskal
Il grafico mostra le coodinate di Kruskal per la soluzione di Schwarzschild.
L’ipersuperficie r = 2M (dove G=1) è detta orizzonte degli eventi, nessuna
particella o segnale luminoso può andare dall’interno all’esterno. È quindi evidente che la soluzione completa di Schwarzschild rappresenta un buco nero.
2.2
Diagramma di Penrose
I diagrammi di Penrose sono delle rappresentazioni la cui metrica localmente è conforme a quella reale dello spazio-tempo. Per far ciò si parte
2.2 Diagramma di Penrose
20
dall’espressione della metrica in coordinate polari:
ds2 = −dt2 + dr2 + r2 dθ2 + sin2 θdφ2
(2.6)
Apparentemente ci sono due singolarità, una in r = 0 e l’altra per sin2 θ = 0.
Per evitare ciò si possono introdurre due nuove coordinate w e v (coordinate
di avanzamento e ritardo temporale):
v =t+r
w =t−r
(2.7)
Si avrá quindi:
r=
v−w
v+w
1
1
,t =
⇒ dt = (dv + dw) , dr = (dv − dw)
2
2
2
2
(2.8)
Sostituendo nella (2.6):
ds2 = −dvdw +
1
(v − w)2 dθ2 + sin2 θdφ2
4
(2.9)
dove −∞ < v < +∞ e −∞ < w < +∞. L’assenza di termini quadratici in
dv 2 e in dw2 indica il fatto che le superfici con w o v costanti sono nulle. Con
questa scelta si sono eliminate le singolarità, il prossimo obiettivo è quello di
trovare un set di coordinate che assuma un valore finito quando v e w sono
invece infinite. Si introducono:
tan p = v
tan q = w
(2.10)
con − π2 < p < π2 e − π2 < q < π2 . Sostituendo i differenziali dv = sec2 p dp e
dw = sec2 q dq si ottiene:
1 2
ds = sec p sec q −dp dq + sin (p − q) dθ2 + sin2 θdφ2
4
2
2
2
(2.11)
Tuttavia la metrica reale è conforme, per la (2.9) a:
ds2 = −4dp dq + sin2 (p − q) dθ2 + sin2 θdφ2
(2.12)
Vogliamo ricavare ora il fattore conforme, per far ciò si definiscono le variabili
t0 e r0 :
t0 = p + q, r0 = p − q
dove −π < t0 + r0 < +π, −π < t0 − r0 < +π, r0 ≥ 0 ottenendo:
ds2 = −dt02 + dr02 + sin2 r0 dθ2 + sin2 θdφ2
2.2 Diagramma di Penrose
21
Risulta quindi:
1 0
1 0
1
(t + r0 ) sec2
(t − r0 ) ds2
ds = sec2
4
2
2
2
(2.13)
e le variabili t ed r:
1
1
2t = tan (t0 + r0 ) + tan (t0 − r0 )
2
2
1
1 0
(t + r0 ) − tan (t0 − r0 )
2
2
Lo spazio statico di Einstein, eliminando le coordinate θ e φ, può essere
rappresentato da un cilindro e una regione finita di esso ( −π < t0 + r0 <
+π, −π < t0 − r0 < +π, r0 ≥ 0) è proprio lo spazio-tempo di Minkowski. In
tale rappresentazione ad ogni punto corrisponde una 2-sfera.
2r = tan
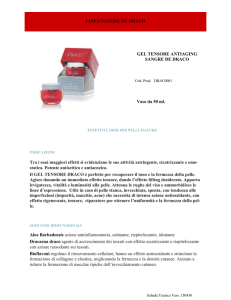
Figura 2.2: Rappresentazione conforme dello spazio di Einstein
La regione conforme allo spazio di Minkowski è racchiusa dalle superfici
nulle I + (p = 21 π), I − (q = − 12 π) e dai punti i+ (p = 21 π, q = 12 π), i0
(p = 21 π, q = − 21 π) e i− (p = − 12 π, q = − 12 π). I punti i+ e i− rappresentano
rispettivamente infinito di tipo tempo futuro e passato mentre i0 è infinito
di tipo spazio. I + è l’infinito nullo futuro e I − è quello passato.
La stessa struttura conforme graficata nel piano (r0 , t0 ) è detta diagramma di
Penrose.
2.2 Diagramma di Penrose
22
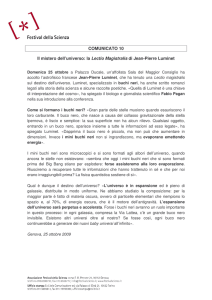
Figura 2.3: Diagramma di Penrose
In questa rappresentazione le geodetiche nulle sono rette a ±45◦ , gli infiniti sono delle linee, l’origine delle coordinate polari è una linea tratteggiata
e le singolarità di metrica sono linee doppie. I diagrammi di Penrose sono utili
soprattutto quando c’è una simmetria sferica nel 4-spaziotempo poichè possiamo pensare che esso sia un 2-spaziotempo fatto ruotare; in tal modo ogni
punto nel 2-spaziotempo rappresenta tutta una superficie nel 4-spaziotempo.
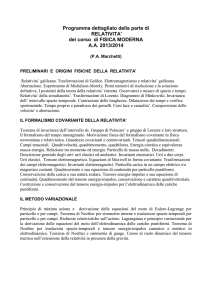
Con questo diagramma si può rappresentare anche il collasso in un buco
nero: nel passato ha lo stesso aspetto di quello per lo spazio di Minkowski
ma nel futuro la parte superiore del triangolo non c’è più perché è presente
la singolarità. Per cui sotto questa linea ci sono punti che non sono nel passato dell’infinito nullo futuro I + . Se un punto giace dentro ad r = 2M G,
entrambi le geodetiche raggiungono la singolarità e l’intero futuro del punto
finisce nella singolarità. È evidente che l’ipersuperficie r = 2M G rappresenta
l’orizzonte degli eventi.
Figura 2.4: Diagramma di Penrose per un buco nero
2.3 Teorema dell’assenza di peli
2.3
23
Teorema dell’assenza di peli
Oltre a quella di Schwarzschild esistono altri tipi di soluzioni per le equazioni
di Einstein: quella di Kerr, quella di Reissner-Nordström ed infine quella
di Kerr-Newman. Può però essere dimostrato un teorema, detto teorema di
unicità, per cui gli unici buchi neri con momento angolare nullo e in assenza
di altri campi sono quelli desritti dalla metrica di Schwarzschild, quelli con
massa e momento angolare da quella di Kerr e quelli carichi da quella di
Reissner-Nordström. L’aspetto che contraddistingue un buco nero è di avere
un campo scalare costante. Questo teorema non esclude però la presenza di
soluzioni dell’equazione di Einstein che non sia un buco nero. Se si considera
ad esempio la soluzione di Schwarzschild con un campo non costante tale che
∇2 ϕ 6= 0 si ottiene la cosiddetta singolarità nuda che non presenta un orizzonte degli eventi. Questo ci fa capire che le uniche caratteristiche di un buco
nero sono la massa, il momento angolare e la carica (teorema dell’assenza
di peli). Questo teorema è estremamente connesso all’ipotesi della censura
cosmica. Tale congettura afferma la non esistenza in natura di singolarità
nude. Questo perché la presenza di campi non costanti, e quindi di singolarità nude, è resa possibile se l’energia cinetica può assumere valori negativi
ma, visto che ciò non può accadere in natura, l’ipotesi della censura cosmica è
accettabile. Inoltre il teorema di assenza di peli giustifica l’ipotesi che i buchi
neri abbiano una grande entropia. Infatti quando un corpo collassa perde
una grande quantità di informazioni (tipi di materia e momenti multipolari
della distribuzione di massa) tranne il momento di monopolo che è la massa
e quello di dipolo che è il momento angolare.
2.4
Leggi della termodinamica dei buchi neri
È possibile fare un’analogia tra il comportamento dei buchi neri e le leggi
della termodinamica. Si può definire l’area dell’orizzonte degli eventi come:
A=
Z
r=Rs
dΩ2 r2 = 4 πRs2
(2.14)
Hawking ha dimostrato classicamente che l’area dell’orizzonte degli eventi
non può mai diminuire nel tempo e che se si fondono due buchi neri la cui
area dell’orizzonte degli eventi è rispettivamente A1 e A2 l’oggetto risultante
avrà un’area maggiore o uguale ad A1 + A2 . Queste caratteristiche fanno
pensare ad un’analogia tra questa grandezza e l’entropia (S). Quanto detto
può risultare più chiaro se si osserva la F igura 2.4: l’orizzonte degli eventi è
generato da segmenti geodetici nulli che possono avere estremi passati ma non
2.4 Leggi della termodinamica dei buchi neri
24
hanno estremi futuri. Da ciò segue che i generatori dell’orizzonte non possono
essere convergenti perchè, se lo fossero, si intersecherebbero a distanza finita.
Questo implica che l’area di una sezione trasversale dell’orizzonte degli eventi
non può mai diminuire col tempo.
Definiamo un’ulteriore grandezza: la gravità superficiale che è l’accelerazione
per portare un’unità di massa dall’infinito all’orizzonte degli eventi. Sia k ν
un vettore di Killing normalizzato, allora la gravità superficiale κ è definita
come:
1
(2.15)
κ2 = − (∇µ k ν ) (∇µ kν )
2
valutata nell’orizzonte degli eventi.
Usando la metrica di Schwarzschild la gravità superficiale è:
κ=
c4
4GM
(2.16)
É evidente che questa grandezza è costante per ogni buco nero all’orizzonte
degli eventi. Questo porta ad un’analogia con la temperatura (T ), che è
costante in un oggetto all’equilibrio termico.
Per vedere se quest’analogia è realmente attendibile si usa anche il primo
principio della termodinamica:
dE = T dS ⇒ dM ≈
1
κdA
G
dove G è presente per motivi dimensionali. In effetti anch’esso risulta verifi1
cato e il coefficiente di proporzionalità è dato da 8π
. Integrando quest’espressione si ottiene:
1
M=
κA
(2.17)
4πG
Esiste anche una formulazione di questo principio, formula di Smarr, che
considera anche il momento angolare e la carica elettrica
dM =
κ
dA + ΩdJ + ΦdQ
8π
dove M è la massa, A è l’area dell’orizzonte degli eventi, Ω è la velocità
angolare, J è il momento angolare, Φ è il potenziale elettrostatico, Q è la
carica elettrica. Il termine ΩdJ + ΦdQ rappresenta il lavoro fatto sul buco
nero da qualche agente esterno che incrementa il momento angolare e la carica. Questi due termini quindi equivalgono a −P dV che rappresenta il lavoro
fatto su un sistema termodinamico classico secondo il primo principio della
termodinamica (dE = T dS − P dV ).
Quanto detto sembra portare a delle contraddizioni. Abbiamo già notato che
2.4 Leggi della termodinamica dei buchi neri
25
da un buco nero non può sfuggire neanche un segnale luminoso. Questo direbbe che la sua temperatura sia allo zero assoluto altrimenti avrebbe avuto
uno spettro di emissione, ciò comporterebbe che la sua entropia non potrebbe
essere finita. Classicamente ciò non può essere spiegato, bisogna quindi far
ricorso alla teoria quantistica e in particolare al concetto di radiazione di
Hawking. Dal vuoto sono prodotte continuamente coppie virtuali di particelle
e antiparticelle che si annichilano, secondo il principio di indeterminazione
h
. La presenza di un
tempo-energia (∆E∆t ≥ h), dopo un tempo ∆t = ∆E
buco nero modifica questo processo per cui alcune delle particelle delle coppie precipitano nel buco e le altre sfuggono. Questo processo può avvenire
solamente quando la particella che sfugge diventa reale quindi, per la conservazione dell’energia, la particella nel buco deve avere energia negativa.
Questo fa sı̀ che il buco nero perda massa. Il buco nero ha lo spettro di emish̄κ
. Questo permette di calcolare
sione di un corpo nero a temperatura T = 2πc
la costante di proporzionalità tra A ed S:
S=
c3
A
4h̄G
(2.18)
che per il buco nero di Schwarzschild diventa:
h̄c3
8πGM
4πGM 2
S=
h̄c
T =
(2.19)
(2.20)
É da notare che in questo sistema di unità di misura la costante di Bolzmann
kB è posta uguale ad 1, quindi la temperatura T ha le dimensioni di M L2 T −2
e l’entropia S è adimensionata. Nel limite per h̄ → 0 l’entropia è infinita e la
temperatura è zero come previsto classicamente.
È evidente dalla (2.19) che la massa e la temperatura sono inversamente
proporzionali, quindi se un buco nero aumenta la propria massa la sua temperatura diminuisce.
Analogamente possiamo notare che il calore specifico per un buco nero di
Schwarzschild
∂T
C −1 =
∂M
è negativo in quanto la temperatura diminuisce quando l’energia, quindi la
massa, aumenta.
Rimane da chiarire il parallelismo concettuale tra l’entropia termodinamica
e quella dei buchi neri. Fin’ora è stato sottolineato soltanto il fatto che le
due si comportino come enti matematici allo stesso modo. La tendenza dell’area dell’orizzonte degli eventi ad aumentare e la tendenza dell’entropia ad
2.4 Leggi della termodinamica dei buchi neri
26
aumentare fanno sı̀ che sistemi di buchi neri (analogamente a quanto accade
per sistemi termodinamici) selezionino una direzione preferenziale dello scorrere del tempo, quello cioè in cui tale grandezza aumenta.
L’entropia termodinamica rappresenta il grado di degradazione dell’energia,
anche l’area dell’orizzonte degli eventi viene ad identificarsi con ciò. La massa
irriducibile di un buco nero è data da:
A
Mir =
16π
12
e rappresenta l’energia che non può essere estratta per mezzo di un processo di Penrose. Un processo di Penrose è un modo per estrarre energia da
un buco nero rotante reso possibile dall’esistenza di un’ergosfera (regione in
cui le particelle sono costrette a muoversi insieme allo spazio-tempo rotante)
nello spazio di Kerr. Il momento angolare del buco nero diminuisce e questa riduzione corrisponde al trasferimento di energia il cui momento angolare
perso è convertito in energia estratta. È proprio per questo che la massa irriducibile è quell’energia che non può essere trasformata in lavoro. Per cui
anche nella termodinamica dei buchi neri, l’entropia(area dell’orizzonte degli
eventi) viene a quantificare il grado di inconvertibilità dell’energia.
Inoltre l’entropia di un sistema misura il grado di incertezza o di assenza
di informazioni sulla configurazione interna del sistema compatibilmente ai
parametri termodinamici macroscopici come ad esempio temperatura, presP
sione, volume (S = − n pn lnpn dove pn è la probabilità di avere lo stato
n-esimo). Analogamente ad un sistema termodinamico, un buco nero è rappresentato dalle tre grandezze già viste (massa, carica e momento angolare).
L’entropia di un buco nero misura il grado di inaccessibilità alle informazioni
relative alla precisa configurazione interna da parte di un osservatore esterno. Questi concetti portano ad enunciare un ulteriore seconda legge della
termodinamica dei buchi neri, detta principio generalizzato o di Bekenstein,
che afferma che la somma tra l’entropia di un buco nero e quella dell’ambiente
circostante non può mai diminuire. Questo puó essere spiegato come segue.
Un corpo di entropia S entra in un buco nero, S per quanto detto rappresenta l’incertezza sulla conoscenza della configurazione interna del corpo stesso.
Dal momento che questo oggetto entra nel buco nero, l’informazione sul suo
stato diventa inaccessibile. Ci si aspetterebbe un aumento di S di entropia
del buco nero, mentre tale incremento è maggiore in quanto le informazioni a
disposizione del corpo caduto vanno perse all’interno del buco nero. Questo
spiega dunque il secondo principio generalizzato.
Quanto detto verrá chiarito di seguito da un esempio.
2.4 Leggi della termodinamica dei buchi neri
27
Esempio
L’entropia di un buco nero è proporzionale alla sua area A ed è data da:
S=
c3
A
4Gh̄
(a) Calcolare la velocità di fuga da una massa M ad un raggio R usando la
meccanica classica. Trovare la relazione tra il raggio e la massa di un
buco nero sostituendo la velocità della luce c alla velocità di fuga. (Il
calcolo relativistico non cambia il risultato, ottenuto originariamente
da Laplace).
(b) Aumenta o diminuisce l’entropia quando due buchi neri si fondono in
uno? Di quanto cambia l’energia dell’universo (anche in unità di bit)
quando si uniscono due buchi neri di massa uguale alla massa solare
(M ≈ 2 × 1030 kg)?
(c) L’energia interna di un buco nero è data dalla relazione di Einstein,
E = mc2 . Trovare la temperatura di un buco nero espresso in funzione
della sua massa.
(d) Un buco nero emette radiazione termica dovuta al processo di creazione
sul suo orizzonte degli eventi. Trovare il tasso di energia persa attraverso
questa radiazione.
(e) Calcolare il tempo che impiega un buco nero isolato per evaporare.
Quant’è questo tempo per un buco nero di massa solare?
(f ) Qual’è la massa di un buco nero che è all’equilibrio termico con l’attuale
radiazione di fondo a T = 2.7◦ K?
(g) Considerare un volume sferico di spazio di raggio R. Dal recente Principio olografico si sa che esiste un valore per la massima entropia che può
avere un certo volume nello spazio, indipendentemente da cosa contiene. Qual’è questa massima entropia?
Svolgimento
(a) Classicamente la velocità di fuga si ottiene uguagliando l’energia potenziale gravitazionale all’energia cinetica sulla superficie:
G
mvE2
Mm
=
R
2
2.4 Leggi della termodinamica dei buchi neri
28
quindi
s
2M G
R
Sostituendo a vE la velocità della luce c, si ha che
vE =
R=
2G
M
c2
Per una massa più grande di quella data da questo rapporto (M >
niente può sfuggire ad una distanza più vicina di R.
c2 R
),
2G
(b) Quando due buchi neri di massa M si fondono in uno, il cambiamento
di entropia è:
c3
c3
(A2 − 2A1 ) =
4π R22 − 2R12 =
4Gh̄ #
" 4Gh̄
2
2
3 πc
2G
2G
8πGM 2
=
2M
−
2
M
>0
=
Gh̄
c2
c2
ch̄
∆S = S2 − 2S1 =
Da questo calcolo si può vedere che, unendo due buchi neri, l’entropia
dell’universo aumenta.
Se si fondono due buchi neri di massa pari a M il cambiamento di
entropia è:
8πGM2
8π · 6.7 × 10−11 (N · m/kg 2 ) · (2 × 1030 )2 kg 2
≈
≈ 2·1078
∆S =
8
−34
ch̄
3 × 10 (m/s) · 1.05 × 10 (J · s)
In un unità di bit l’informazione persa è
NI = ∆S ln 2 = 1.39 × 1078
(c) Usando la definizione termodinamica di temperatura
lazione di Einstein E = M c2 :
1 ∂
c3
2G
1
= 2
4π
M
T
c ∂M 4Gh̄
c2
"
2 #
=
1
T
=
∂S
∂E
e la re-
8πG
h̄c3 1
M
⇒
T
=
h̄c3
8πG M
(d) La diminuzione di energia E di un buco nero di area A a temperatura
T è data dalla legge di Stefan-Bolzmann,
1 ∂E
= −σT 4 ,
A ∂t
dove σ =
π2
.
60h̄3 c2
2.4 Leggi della termodinamica dei buchi neri
29
(e) Usando il risultato del punto (d) si può calcolare il tempo che impiega
un buco nero per evaporare.
Per un buco nero
2G
A = 4πR = 4π
M
c2
2
2
=
16πG2 2
h̄c3 1
2
.
M
,
E
=
M
c
,
T
=
c4
8πG M
Quindi
d 2
π2
Mc = −
dt
60h̄3 c2
16πG2 2
M
c4
h̄c3 1
8πG M
!
!4
,
che implica
M2
dM
h̄c4
=−
≡ −b.
dt
15360G2
Risolvendo:
1/3
M (t) = M03 − 3bt
.
La massa diventa zero e il buco nero evapora dopo un tempo pari a τ :
τ=
5120G2 M3
M03
=
≈ 2.2 × 1074 s
3b
h̄c4
che è considerevolmente maggiore dell’età odierna dell’universo (approssimativamente dell’ordine di 1018 s).
3
h̄c
(f ) La temperatura e la massa di un buco nero sono legate da M = 8πGT
.
Per un buco nero all’equilibrio termico con l’attuale radiazione cosmica
di fondo a T = 2.7◦ K,
M≈
J · Kg
1.05 × 10−34 (J · s)(3 × 108 )3 (m/s)3
≈ 0.62
.
−11
2
2
8π · 6.7 × 10 (N · m /kg · 2.7 ◦ K
K
(g) La massa in un volume sferico di raggio R deve essere minore della
massa che dovrebbe avere un buco nero che occupa lo stesso volume.
Portando ulteriore massa (da infinito) nel volume sferico si ottiene la
stessa configurazione del buco nero. Chiaramente l’entropia del sistema
aumenta nel processo e l’entropia finale, che è l’entropia del buco nero
che è maggiore di quella del volume iniziale, porta a:
S ≤ SBH
c3
=
A,
4Gh̄
dove A = 4πR2 è l’area che racchiude il volume equivalente a quello del
buco nero. L’osservazione sorprendente è che il limite superiore dell’entropia è proporzionale all’area A, mentre ci si aspetta che per i sistemi
2.4 Leggi della termodinamica dei buchi neri
30
di particelle essa sia proporzionale ad N . Questo rimane valido finchè
le interazioni alle alte temperature sono trascurabili. Il Principio olografico è un’allusione di ciò che accade in un’osservazione che considera
i gradi di libertà di superficie, piuttosto che quelli di volume. Questo
è stato formulato nell’ambito della teoria delle stringhe che tenta di
costruire una teoria consistente della gravità quantistica, che rimpiazza
particelle intese come gradi di libertà con stringhe.
Nella tabella di seguito sono riassunte le quattro leggi della termodinamica
dei buchi neri:
Principio zero
Primo principio
Secondo principio
Secondo principio generalizzato
Terzo principio
La gravità superficiale di un buco nero
é costante all’orizzonte degli eventi
per un buco nero stazionario.
κ
dA + ΩdJ + ΦdQ
dM = 8π
L’area dell’orizzonte degli eventi
non diminuisce nel tempo dA ≥ 0.
La somma dell’entropia del buco
nero e dell’entropia dell’universo
non diminuisce mai.
Non è possibile con un numero
finito di operazioni ridurre κ a zero.
Tabella 2.1: Leggi della termodinamica dei buchi neri
Bibliografia
[1] S.Weinberg: Gravitation and cosmology: principles and applications of
the general theory of relativity, edizione John Wiley & Sons, 1-248;
[2] T.Ortı́n: Gravity and strings, edizione Cambridge University Press, 187212;
[3] S.W.Hawking e G.F.R.Ellis: The large scale structure of space-time,
edizione Cambridge University Press, 117-124, 256-289,308-323;
[4] J.D.Bekenstein,Phys. Rev. D9 (1973), 2333-2346;
[5] J.D.Bekenstein,Phys. Rev. D7 (1974), 3292-3300.