MACCHINE E SISTEMI ELETTRICI Leggi dei circuiti elettromagnetici 𝑒=−
!"
Legge elementare dell’induzione ELM 𝑒=
𝑣 ∙ 𝐵×𝑑𝑙 Induttanza di un dipolo 𝐿 = Legge generale dell’induzione ELM Seconda legge elementare di Laplace (FBI mano sx!!!) !"
!
!
𝑑𝐹 =
𝑖 ∙ 𝑑𝑙×𝐵 LKC: La somma algebrica delle correnti elettriche/flussi di induzione magnetica entranti in un nodo è nulla LKT:la somma algebrica delle c.d.t. elettriche/magnetiche lungo una linea chiusa eguaglia la somma algebrica delle f.e.m./f.m.m. (somma delle d.d.p nulla) Regime PAS Sia dato un segnale sinusoidale (i o v) di ampiezza Am e fase θ. Dato il valore !
efficace 𝐴 = ! esso è rappresentabile con un fasore (numero complesso) !
Fasore 𝐴𝑒 !" = 𝐴 cos 𝜃 + 𝑗𝐴 sin 𝜃 = 𝐴 ⦣𝜃 Posso rappresentare segnali sinusoidali (v ed i a regime) come fasori La relazione fondamentale è la legge di Ohm simbolica 𝑉 = 𝑍𝐼 Le impedenze (pari delle resistenze in CC) sono rappresentate da numeri complessi. Il loro inverso sono le ammettenze (pari delle conduttanze in CC) 𝑍 𝑖𝑚𝑝𝑒𝑑𝑒𝑛𝑧𝑎 = 𝑅 𝑟𝑒𝑠𝑖𝑠𝑡𝑒𝑛𝑧𝑎 + 𝑗𝑋(𝑟𝑒𝑎𝑡𝑡𝑎𝑛𝑧𝑎) 𝑌 𝑎𝑚𝑚𝑒𝑡𝑡𝑒𝑛𝑧𝑎 = 𝐺 𝑐𝑜𝑛𝑑𝑢𝑡𝑡𝑎𝑛𝑧𝑎 + 𝑗𝐵(𝑠𝑢𝑠𝑐𝑒𝑡𝑡𝑎𝑛𝑧𝑎) Per gli elementi circuitali si ha: • Resistore 𝑣 𝑡 = 𝑅𝑖(𝑡) 𝑍 = 𝑅 !
𝑌 = !" !
!
!
• Induttore 𝑣 𝑡 =𝐿
𝑍 = 𝑗𝜔𝐿 𝑌 = − !"
!"
Tensione in anticipo sulla corrente, assorbe potenza reattiva !
!
• Condensatore 𝑣 𝑡 =
𝑖 𝑡 𝑑𝑡 𝑍 = − 𝑌 = 𝑗𝜔𝐶 !
!"
Tensione in ritardo sulla corrente, eroga potenza reattiva Dato un bipolo di cui siano noti v ed i in regime PAS, si ha •
•
•
•
Potenza complessa Potenza apparente Potenza attiva Potenza reattiva 𝐴 = 𝑉 ∙ 𝐼 ∗ = 𝑃 + 𝑗𝑄 𝐴 = 𝐴 = 𝑃 ! + 𝑄 ! 𝑃 = 𝑉𝐼 cos 𝜃 𝑄 = 𝑉𝐼 sin 𝜃 • Sfasamento tra v ed i 𝜃 = tan!!
• Fattore di potenza 𝑓𝑝 = cos 𝜃 !
!
[VA] [VA] [W] [VAR] [rad] [-­‐] Seguono le convenzioni per i carichi Se FP è in ritardo θ è positivo -­‐> assorbo Q (induttore), I in ritardo su V Se FP è in anticipo θ è positivo -­‐> erogo Q (condensatore), I in anticipo su FP in ritardo -­‐> I in ritardo ; FP in anticipo -­‐> I in anticipo (la potenza è corretta se V ed I sono espressi con il loro valore efficace, la RMS) Sistemi PAS trifase equilibrati e simmetrici Si distinguono due tensioni per ogni bipolo: la tensione di fase è la d.d.p. (RMS) tra un nodo e il valore medio della sinusoide (potenziale nullo). La tensione concatenata è la d.d.p. tra due nodi simmetrici di due bipoli. La tensione concatenata è pari alla tensione di fase, moltiplicata per la radice quadrata di 3. Tre generatori (o carichi) simmetrici possono essere collegati a stella o a triangolo. Se connessi a triangolo abbiamo ai loro capi le tensioni concatenate, se connessi a stella abbiamo le tensioni di fase. Tre elementi possono essere trasformati da stella a triangolo e viceversa. Si ha 𝑣∗ =
!
!
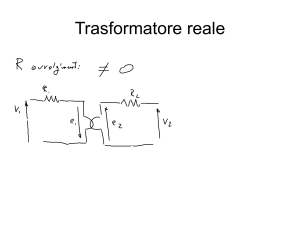
∙ 𝑣∆ 𝑖∗ = 3 ∙ 𝑣∆ Se ho espresso le v e le i con le RMS le potenze erogate/assorbite da un generatore/carico trifase sono il triplo della potenza del singolo bipolo. Trasformatore La relazione fondamentale è la seguente Definiamo 𝑖!! =
!!
!!
=
!!
!!
!!
𝑖 , si avrà che la differenza tra questa e la corrente 1 è pari a !! !
quella circolante nel ramo derivato (L1m). Tale è la corrente di magnetizzazione, che è necessaria per sostenere il flusso magnetico (è circa il 1-­‐2% in un trasformatore). Il ramo derivato può anche essere modellato con una resistenza in parallelo che rappresenta le perdite nel ferro (isteresi, correnti parassite). R1 ed R2 invece sono le perdite nel rame, ossia le perdite Joule degli avvolgimenti. È possibile trasferire le impedenze da un lato all’altro. Per trasferire le impedenze dal secondario al primario vale la seguente relazione 𝑍!!
𝑁!!
= ! 𝑍! 𝑁!
Riportando l’impedenza dal secondario al primario si perviene al modello a T Noti i parametri di targa di un trasformatore si eseguono due prove per determinare i valori delle impedenze/ammettenze. Con la prova in cortocircuito si mette in corto il secondario. Si alimenta in tensione il primario e si misura la corrente al primario. Il rapporto è pari all’ impedenza Z1+Z2’ (poiché la Z0 del ramo derivato è molto più grande di Z2’) Con la prova a vuoto si lascia aperto il secondario. Si alimenta in tensione il primario e si misura la corrente al primario. Il rapporto è pari all’impedenza Z0 (poiché molto più grande di Z1), e la corrente è circa quella di magnetizzazione Vcc – d.d.p. tale per cui in cto cto si ha una corrente pari alla nominale I0 – corrente tale per cui a vuoto si ha una tensione pari alla nominale Metodi di calcolo in Per Unit Data una rete si fissano una serie di parametri definiti come nominali. In presenza di trasformatori la rete è suddivisa in sottoreti interconnesse da essi. Si fissa una potenza base Ab e, per ogni sottorete, una tensione base Vb. Tutte le altre grandezze di base derivano da queste Posso quindi ricavare ogni grandezza in PU In una rete in cui esprimiamo le grandezze in PU possiamo eliminare i trasformatori (non le loro impedenze!) ricordandoci che a monte e a valle di essi le grandezze PU sono riferite a tensioni di base diverse. Inoltre, se a monte e a valle di un trasformatore le Vb e la Ab sono quelle di targa della macchina, la Vcc% coincide con la sua impedenza di cto cto , e la I0% coincide con l’ammettenza del ramo derivato. Se sono fornite le potenze perse in cto cto o a vuoto queste eguagliano rispettivamente la resistenza di cto cto o la conduttanza del ramo derivato. In mancanza di tali Pcc si considerano le impedenze/ammettenze puramente reattive. Trasduttore elettromeccanico elementare • La barretta ha resistenza R e non ha attrito • B è stazionario uniforme entrante • La barretta si muove di velocità uniforme • Il dispositivo è alimentato da V in CC A causa dell’aumento dell’area concatenata dalla spira aumenta il flusso magnetico e si genera una f.e.m. indotta 𝐸 = 𝐵 ∙ 𝑑 ∙ 𝑣 A vuoto la barretta raggiunge una velocità v0 tale per cui la f.e.m. indotta !
eguaglia l’opposto della V di alimentazione: 𝑣! = !∙!
Se agisce una forza meccanica Fm si ha equilibrio quando questa è pari e opposta alla forza elettrodinamica 𝐹!" = 𝐵 ∙ 𝑑 ∙ 𝐼 = 𝐵 ∙ 𝑑 ∙
!
!
Si può facilmente calcolare il rendimento come 𝜂 =
1−
!
!!
!!"#
!!"#$%
=
= 𝐹!",! 1 −
!∙!
!∙!
=
!∙!
!∙!
!
!!
Campo magnetico rotante Considerando una bobina prospiciente al traferro questa genera un campo di induzione magnetica B radiale a forma di onda quadra in funzione dell’angolo θ (in coord. cilindriche), tuttavia consideriamo solo l’armonica principale. Se la riluttanza nel ferro è trascurabile da c.d.t.m. è concentrata nel traferro di spessore δ. Se α è l’angolo dell’asse polare della bobina si ha 𝐵 𝜃 = 𝜇!
! !
!
= 𝜇!
! !
!
𝑀 𝜃 =
! !∙!
! !
cos 𝜃 Teorema di Galileo Ferraris: Un insieme di tre avvolgimenti uguali, ugualmente spostati lungo un’armatura cilindrica e percorsi da un sistema trifase di correnti equilibrate con pulsazione ω produce un’onda di f.m.m. nel traferro che trasla con velocità angolare Ω=ω, la cui ampiezza è pari a 3/2 di quella massima di ciascuna fase e il cui massimo è sull’asse magnetico di una fase quando la corrente in quella fase è massima. Ciò è valido per bobine a passo diametrale (2 poli). Se le bobine hanno np poli vale la seguente relazione tra la velocità di rotazione Ω del campo di f.m.m. e la !!
pulsazione delle grandezze elettriche ω: 𝛺 = !"
Macchina Asincrona La corrente circolante nello statore a frequenza f1 genera un campo magnetico che ruota con velocità N0. Se il rotore è fermo questa vi induce una f.e.m. ed esso genera a sua volta un campo magnetico che ruota alla stessa velocità. La macchina si comporta come un trasformatore. Si avranno una E1,0 ed una E2,0 ! !!
legate dal rapporto spire. Definiamo lo scorrimento come 𝑠 = ! . !!
A rotore fermo (N=0) si ha s=1. Se il rotore ruota a velocità N (s≠0), il campo magnetico di statore genera ancora una f.e.m. nel rotore, ora di frequenza 𝑓! = 𝑠. 𝑁! . il campo magnetico generato dal rotore tuttavia ruota con la stessa velocità di quello di rotore poiché ad esso si somma la velocità meccanica del rotore stesso 𝑁 = 1 − 𝑠 ∙ 𝑁! . I due campi magnetici isofrequenziali si sommano e si ha sempre funzionamento da trasformatore. Variano anche 𝐸! = 𝑠 ∙ 𝐸!,! e 𝐸! = 𝑠 ∙ 𝐸!,! . Anche la reattanza del secondario varia (è funzione della frequenza). Tuttavia ai fini energetici è identico se al secondario consideriamo stessa frequenza del primario, stessa reattanza e sostituiamo la !
resistenza R2 con ! . Per studiare la macchina si riportano quindi gli elementi dal !
secondario al primario e si adotta un’ulteriore semplificazione, ossia si riportano R1 ed X1 a destra del ramo derivato (I1≅I’2). Sulla base del circuito semplificato si può dimostrare il teorema di equivalenza delle macchine asincrone: L’equivalenza consiste nel fatto che il campo al traferro, la corrente di statore, il valore efficace della corrente di rotore e lo sfasamento tra corrente di rotore e flusso concatenato con la spira centrale rotorica, sono gli stessi nelle diverse condizioni di funzionamento. Ne consegue che risultano identiche: le perdite per effetto Joule in entrambi gli avvolgimenti, la potenza elettrica assorbita dallo statore, le perdite nel ferro di statore. Operativamente sono richieste la prova a vuoto e la prova a rotore bloccato (equivale al cto. cto. del trasformatore). Se ho solo la prova a vuoto, devo conoscere la corrente che scorre nel rotore a carico (è sempre costante in modulo per S non nullo) e trascurare le c.d.t. al primario. Quindi: • Ricavo la velocità di rotazione date pulsazione, scorrimento, e N° di poli • Ricavo la potenza meccanica data la coppia • Ricavo le perdite joule al secondario (S è anche i rapporto tra potenza dissipata per effetto joule e potenza trasmessa, al secondario) • Data la corrente e la tensione, funzione del rapporto spire, calcolo la potenza apparente, ricavo la complessa e quindi la reattanza • Ricavo la corrente al primario e sommo il suo fasore con quello della corrente a vuoto, invariata poiché non ci sono c.d.t. al primario Macchina Sincrona Nello studio della MS si trascurano le perdite. Si adotta un modello semplificato dove abbiamo in serie la f.e.m. indotta E dal rotore nello statore (o armatura) e una reattanza Xs. E è direttamente proporzionale alla corrente di eccitazione Ie (finché B-­‐H è lineare, o la permeabilità magnetica è costante). Xs provoca una variazione di potenziale ai suoi capi, pari a jXI, chiamata reazione di indotto (o di armatura. Ai capi dei due bipoli agisce la tensione parallela V. Troviamo due convenzioni diverse per il verso della corrente circolante, fattore di potenza e angolo di fase, a seconda che la macchina sia un generatore o un utilizzatore. Poniamo innanzitutto V sull’asse reale di un diagramma fasoriale. Generatore Utilizzatore FP=cosφ In ritardo In anticipo In ritardo In anticipo φ=arg(I) Negativo Positivo Positivo Negativo Pot.reattiva Erogata Assorbita Assorbita Erogata Agisce come Condensatore Induttore Induttore Condensatore È possibile calcolare le varie grandezze, che risulteranno collegate da funzioni trigonometriche. I due angoli principali sono δ (tra V ed E) e φ (tra V ed I). Alcune relazioni notevoli sono le seguenti 𝐸 sin 𝛿 = 𝑋𝐼 cos 𝜑 𝐸 = 𝑉 + 𝑗𝑋𝐼 Oltre a Xs può esserci anche una resistenza R. In questo caso è sufficiente considerare la variazione di potenziale causata dall’impedenza Z=R+jXI. Equazioni di Power Flow Innanzitutto semplifico la rete con i valori in per unit (riferirsi ai trasformatori per ricavare direttamente le loro impedenze). Se un nodo non è interessato da prelievi o iniezioni di potenza posso sopprimerlo se connesso a due linee, trasformare da stella a triangolo se connesso a più di due linee. Dopo aver trovato le ammettenze di ogni linea posso ricavare la matrice Y per ispezione: gli elementi diagonali saranno la somma delle ammettenze dei lati connessi al relativo nodo, e gli elementi extradiagonali saranno pari all’opposto dell’ammettenza che connette i relativi due nodi (0 se non connessi). Assegnato ad un nodo il ruolo di saldo, i restanti vengono suddivisi in PE (generatori) e PQ (carichi). Si avranno un totale di quattro parametri per nodo (P,Q,E,δ) di cui due sono assegnati. Le equazioni di Power Flow sono un sistema avente la forma !
𝑃! − 𝐸! ∙
𝐸! 𝑌!" cos 𝛿! − 𝛿! − 𝜗!" = 0
!!!
!
𝑄! − 𝐸! ∙
𝐸! 𝑌!" sin 𝛿! − 𝛿! − 𝜗!" = 0
!!!
P e Q del nodo di saldo sono variabili dipendenti poiché sommati a tutte le altre P e Q e alle perdite di P e Q di rete sono uguali a zero. Ad essi tuttavia posso assegnare la fase e tensione di riferimento (interessano le d.d.p e le d.d. fase). Il sistema è risolto numericamente attraverso uno dei seguenti metodi iterativi che ricercano il profilo di tensioni e di fasi di ogni nodo. Metodo di Gauss È ricavata un’ulteriore equazione vettoriale (complessa) per il fasore E. (!)
(!!!)
𝐸!
(!)
1 𝑃! − 𝑗𝑄!
=
(!)
𝑌!!
𝐸!
!
(!)
𝑌!" 𝐸!
!!!,!!!
Dove con l’apice ci si riferisce alla t-­‐esima iterazione, se la variabile del relativo nodo non è fissata. • Determino il profilo iniziale (E e δ dei nodi PQ e δ dei nodi PE) • Per i nodi PE calcolo la Q iniziale • Calcolo la E per i nodi PE. Al risultato sostituisco il modulo con quello imposto ma aggiorno la fase • Calcolo la E (modulo e fase) per i nodi PQ • Calcolo Q dei nodi PE, P e Q del nodo di saldo (slack) • Se non ho raggiunto la tolleranza richiesta su E torno al punto 3 Metodo di Newton-­‐Raphson Ad ogni passo dell’iterazione si linearizza il sistema di equazioni e si ricava il relativo profilo. Consideriamo N variabili indipendenti x, ossia E e δ dei nodi PQ e δ dei nodi PE, e altrettante variabili dipendenti y, ossia P e Q dei nodi PQ e P dei nodi PE. Ad ogni iterazione: si costruisce il vettore Δx dato dalla differenza tra le x alla t-­‐esima iterazione e la precedente; si costruisce il vettore dei residui Res dato dalla differenza delle y tra le x alla t-­‐esima iterazione e la precedente; si calcola lo Jacobiano e vale la relazione Res=J·∙Δx. Per esempio, se abbiamo due nodi PQ e uno slack (saldo): 𝛥𝐸!
𝛥𝐸!
𝛥𝑥 =
𝛥𝛿!
𝛥𝛿!
𝐽=
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"#!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
!"!
𝛥𝑃!
𝛥𝑃!
𝑅𝑒𝑠 =
𝛥𝑄!
𝛥𝑄!
In generale il procedimento è il seguente: •
•
•
•
•
•
•
Determino il profilo iniziale (E e δ dei nodi PQ e δ dei nodi PE) Calcolo P e Q dei nodi PQ e P dei nodi PE con i valori del profilo iniziale Calcolo il vettore Res, calcolo J, e infine lo inverto trovando J-­‐1 Trovo Δx=J-­‐1·∙Res Con Δx e gli x all’iterazione precedente trovo gli x dell’iterazione attuale Ricalcolo le P e le Q Se non ho raggiunto la tolleranza richiesta sui Res torno al punto 3