I minimi quadrati e
loro applicazione alla compensazione geodetica
Ludovico Biagi
Politecnico di Milano, DIIAR
[email protected]
Premesse
definizione euristica di distribuzione,
formalizzazione della curva gaussiana
La stima
la stima ai minimi quadrati per un problema lineare
un esempio
La verifica
la verifica di ipotesi in generale
i test sul modello e sulla singola osservazione
accuratezza e affidabilità delle stime
Semplificando
ancora esempi.
Due premesse necessarie: una di due
Misure ripetute della medesima grandezza, eseguite al limite della
precisione possibile con il metodo e gli strumenti utilizzati,
forniscono sempre risultati diversi per la presenza degli errori
casuali; tali errori, non noti, non possono essere eliminati.
Come si può stimare il valore “vero” di una grandezza se non si
conoscono gli errori in ciascuna osservazione?
Si associa alle misure una modellizzazione statistica e matematica:
l’osservazione (misura) è la somma di due componenti: il valore
teorico/vero della grandezza y (osservabile) e l’errore di misura
incognito.
la seconda di due
Errori casuali,
a media nulla, di entità variabile da misura a misura,
dipendente dalle precisioni strumentale e di lettura.
Concetti collegati: sia precisione sia accuratezza
Errori sistematici o di modello,
sistematismi strumentali oppure errata modellizzazione delle
osservazioni o delle relazioni fra osservazioni e incognite
Concetto collegato: accuratezza.
Esempio di
distribuzione degli esiti di 10 osservazioni
La popolazione è troppo piccola per
distinguere una chiara distribuzione.
Esempio di distribuzione per popolazione numerosa
Precisione e accuratezza (1/4)
Precisione e accuratezza (2/4)
Popolazione accurata e precisa Popolazione abbastanza accurata ma non precisa Precisione e accuratezza (3/4)
Popolazione accurata e precisa Popolazione abbastanza accurata ma non precisa Popolazione non accurata ma precisa Precisione e accuratezza (4/4)
Popolazione accurata e precisa Popolazione abbastanza accurata ma non precisa Popolazione non accurata ma precisa Popolazione non accurata e non precisa Dalla popolazione alla frequenza
N:
popolazione totale
nx :
popolazione che assume valori nell'intervallo [ x , x ]
nx
N
frequenza di realizzazione dell'intervallo [ x , x ]
per 0 la frequenza così definita euristicamente
tende al concetto matematico di distribuzione di probabilità
fx
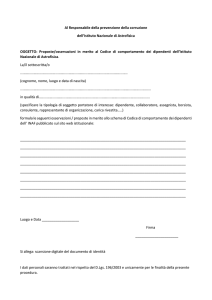
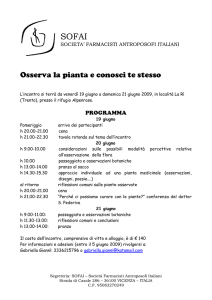
Dalla frequenza alla probabilità:
la curva gaussiana
Misure di precisione di una grandezza,
con valore teorico e deviazione standard ,
si distribuiscono in accordo alla
distribuzione di densità di probabilità Gaussiana
f ( x, , )
1
2
2
e
( x )2
2 2
Gaussiana con
1 Gaussiana con 2 P( xm x xM ) è la probabilità di ottenere una misura che cada
nell’intervallo [ xm , xM ];
P( xm x xM )
xM
xm
f ( )d
Caso Rm
Siano date m osservabili;
possiamo estendere il modello
e scrivere in modo compatto, utilizzando la notazione vettoriale:
y0 y
con
y1O
y1
1
y
y
2
yO O ; y 2 ; ε 2
...
...
...
y
y
m
m
mO
1
( y O y )T Cyy1 ( y O y )
1
2
f (y O )
e
m/2
m/2
(2 ) (det C yy )
C yy è la matrice di covarianza delle osservazioni.
12 12
2
2
C yy 21
...
...
m1 m 2
... 1m
... 2 m
... ...
2
... m
in diagonale le varianze delle singole osservazioni,
fuori diagonale le covarianze fra coppie di osservazioni;
la matrice è simmetrica e definita positiva, quindi invertibile.
Note
In forma compatta si indica y O ~ N y, C yy
Quando la media è nulla, le varianze unitarie, le correlazioni nulle
y O ~ N 0, I Z
è detta normale standardizzata
I Minimi Quadrati
Formalizzazione del problema e degli obiettivi
Siano date m osservazioni
y1o
y
2
yo o
...
ymo
per ogni osservazione i-esima valga
yio yi i , i 0; E i 0
Si ha
y0 y , E yo y
y : vettore delle osservabili, incognite;
y o : vettore delle osservazioni, note;
ε vettore degli errori di osservazione, incogniti.
Sia noto il modello stocastico delle osservazioni,
ovvero la loro matrice di covarianza:
C yy C 02Q
02 è la varianza a priori, Q è la matrice dei cofattori:
Sia x un vettore contenente n parametri incogniti:
x1
x
x 2
...
xn
con n m
Sia noto il modello deterministico del problema,
ovvero la relazione funzionale fra x e y
y f ( x)
Il sistema in x sarebbe risolvibile dalle osservabili y :
x f 1 (y )
Però il sistema non è invertibile utilizzando direttamente le
osservazioni, perché queste sono affette da errori incogniti;
infatti si ha
y o y f ( x) f ( x)
ovvero
x f 1 (y o )
Si pone il problema
di trovare un
metodo che,
sfruttando le
informazioni
disponibili,
permetta la miglior
stima possibile (in
senso statistico)
dei parametri
incogniti ( x̂ ) e delle
osservabili ( ŷ ).
Si cerca inoltre un metodo che permetta di
stimare la precisione di stima delle incognite;
infine sono necessari strumenti per valutare
la presenza di errori nel modello adottato.
Il metodo adottato nella prassi geodetica (compensazione di reti)
è quello dei Minimi Quadrati.
Il metodo si presta a problemi lineari, ovvero nella forma
yo y
y Ax b ,
0, N [0, C ],
C C yy 02Q
La linearizzazione di un problema non lineare
Non esiste una formulazione dei MQ applicabile al problema
generale in forma non lineare
y f ( x)
ove
f1 ( x1 , x2 ,..., xn )
f ( x , x ,..., x )
2 1 2
n
f ( x)
...
f m ( x1 , x2 ,..., xn )
Per risolvere il problema generale è prima necessario linearizzarlo
Si suppone di conoscere
valori approssimati per
i parametri incogniti:
x x1 ,..., xn :
T
x1 x1 ,..., xn xn
;
è allora possibile
linearizzare la relazione
y f ( x)
mediante uno sviluppo di
Taylor arrestato al primo
ordine nell’intorno di x
f1
f1
(x) ( x1 x1 ) ...
(x ) ( xn xn )
x1
xn
f 2
f 2
y2 f 2 ( x )
(x) ( x1 x1 ) ...
(x ) ( xn xn )
x1
xn
…
f m
f m
(x) ( x1 x1 ) ...
(x ) ( xn xn )
ym f m ( x )
x1
xn
y1 f1 (x )
ovvero
y f (x ) J (x )(x x )
o anche
η Aξ
ove
η y f (x ) : 1 y1 f1 (x ),..., m ym f m (x )
ξ x x : 1 x1 x1 ,..., n xn xn
f
dim A m n; Aij i (x )
x j
Si ottiene dunque il problema lineare
ηO η ε
E ηO η Aξ
Mediante MQ si risolve il problema lineare rispetto al vettore dei
parametri incogniti ξ ;
si calcolano i parametri finali mediante la
xˆ x ˆ
yˆ y ˆ
Nota
il metodo da adottarsi per ricavare i valori approssimati dipende da
caso a caso
Gli effetti della linearizzazione
A causa delle approssimazioni introdotte dalla linearizzazione le
prime stime xˆ 1 , yˆ 1 non possono essere considerate definitive.
In particolare gli x̂1 divengono nuovi valori approssimati x 1 :
il processo iterativo termina quando due stime successive
differiscono in modo non significativo, ovvero quando
xˆ n x n
Un esempio di linearizzazione
Sia P un punto di posizione incognita in R3:
XP
P YP
Z P
siano invece P1, P2, P3 e P4 quattro punti di posizione nota:
X 1
P1 Y 1
Z1
X 2
X 4
P2 Y 2 … P4 Y 4
Z2
Z4
Da P sono state misurate le distanze ai quattro punti, ottenendo i
valori 1P O ; P2 O ; P3 O ; P4 O ; si indichi con ρO il vettore delle
osservazioni di distanza.
E’ noto un valore approssimato della posizione di P
X P
P YP
Z P
si vuole stimare la posizione di P.
Procedimento
La generica equazione di osservazione da P a Pi è
Pi ( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
Pi O Pi i
la relazione che lega le distanze (osservate a meno degli errori)
alle incognite (la posizione di P) è non lineare;
il sistema è ridondante: 4 osservazioni per 3 incognite; è possibile
risolverlo mediante MQ ma deve prima essere linearizzato.
Linearizzazione della generica distanza da P a Pi:
Pi ( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
( X P X i )
( X P X P )
( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
(YP Y i )
(YP YP )
( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
( Z P Z i )
( Z P Z P )
( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
Pi Pi e iP
ove
Pi ( X P X i ) 2 (YP Y i ) 2 ( Z P Z i ) 2
(distanza calcolata nei valori approssimati)
X P X i
1
e iP i YP Y i
P
ZP Z i
(versore approssimato da Pi a P)
X P X P
ξ YP YP
Z P Z P
(correzioni da apportare alle coordinate approssimate)
Il problema assume dunque la forma
1PO P1 e1X
2 2 2
PO P eX
P3 P3 eX3
4O 4 4
PO P eX
eY1
eY2
eY3
eY4
eZ1
X
2
eZ
3 Y
eZ
4 Z
eZ
Ovvero
ηO ρO ρ ρ ρ ε
ηε
η Aξ
ora risolvibile mediante MQ.
Minimi quadrati:
principio e
stimatori
Si cercano x̂ e ŷ
consistenti, con ŷ a minima
distanza da y o ; ovvero x̂ e
ŷ tali che
yˆ Axˆ b
(y o y )T Q1 (y o y ) min
Nel seguito vengono riportate senza dimostrazione
le stime fornite dai MQ.
Dalle equazioni di condizione si ricava il cosiddetto sistema
normale
Nxˆ AT Q 1 (y o b) ,
ove N AT Q 1A è detta matrice normale
Si hanno due casi:
A è di rango pieno, ovvero le sue colonne sono linearmente
indipendenti:
Ax 0 x 0
il problema non presenta deficienza di rango.
A non è di rango pieno, ovvero alcune sue colonne sono
linearmente dipendenti dalle altre:
Ax 0 per qualche
x0
in questo caso il problema presenta deficienza di rango.
Le reti geodetiche, semplicemente poste, presentano deficienza di
rango:
si osservano differenze di posizione,
si vogliono stimare posizioni.
Semplificazione del formalismo
Sia
y ' y b, y '0 y 0 b
si ha
C ' yy C yy
y ' Ax,
y '0 Ax
ovvero identico contenuto del modello generale
ma semplificazione formale, che ovviamente adottiamo
Esempio di applicazione geodetica dei MQ
Siano A, B e C tre punti di
livellazione
Siano stati misurati i
dislivelli
da A a B ( DH AB o ),
da B a C ( DH BC o )
e da C a A ( DH CAo ).
Vale la
H B H A DH AB
H A H C DH CA
H C H B DH BC
Quindi il modello deterministico del problema è:
DH AB O H B H A AB
DH CAO H A H C CA
DH BCO H C H B BC
In forma matriciale
yO y
y Ax
ove
1 1 0
H A
A 0 1 1 , x H B
1 0 1
H C
Modello stocastico
Nel presente esempio si considerano le misure di uguale
precisione (che indichiamo con 2 ) e scorrelate:
2 0
0
C yy 0 2 0
2
0
0
ovvero
C yy 2 I
Il problema della
deficienza di rango
Se A non è di rango pieno non lo è
neppure N ed è impossibile invertire il
sistema normale.
Definiamo il nucleo di A come:
N ( A ) x 0 | Ax 0 0.
Ad una stima “ottimale” delle osservabili y corrispondono infinite
soluzioni per i parametri incogniti
Evidentemente se un certo x̂ è soluzione di Axˆ y ,
anche xˆ x0 lo è; infatti
A (xˆ x 0 ) Axˆ Ax 0 yˆ 0 yˆ
in sostanza le osservazioni non contengono abbastanza
informazione per stimare tutti i parametri desiderati; tale
caratteristica non dipende dalla ridondanza ma dal disegno del
problema.
Ad esempio si consideri l’anello di livellazione iniziale e si
supponga di voler stimare tutte le quote dalle misure di dislivello:
yO y
y Ax
DH AB O 1 1 0 H A
DH 0 1 1 H ε
BC O
B
DH CAO 1 0 1 H C
è facile verificare che A non è di rango pieno e che, in particolare,
1
N ( A) 1 H , H R
1
Pensando al problema dal punto di vista fisico, è evidente che i
valori delle osservabili di dislivello del triangolo non vengono
modificati aggiungendo un valore H comune alle 3 quote supposte
incognite:
DH AB H B H A ( H B H ) ( H A H )
DH BC H C H B ( H C H ) ( H B H )
DH CA H A H C ( H A H ) ( H C H )
ovvero le quote dei punti (parametri incogniti), presentano 1 grado
di libertà, rispetto ai dislivelli (osservabili); la situazione non cambia
aggiungendo una o più osservazioni di dislivello (a titolo di
esercizio lo si verifichi aggiungendo ad esempio DH AC ).
La rimozione della deficienza di rango
Per rimuovere la deficienza di rango si deve innanzitutto
identificare preventivamente quali siano i parametri non stimabili
del problema:
ad esempio in una rete di livellazione, con sole osservazioni di
dislivelli, sono stimabili le quote di tutti i punti della rete meno uno.
Per la soluzione sono possibili due approcci alternativi.
1. Si vincolano i parametri non stimabili del problema: ciò equivale
a fissare un Sistema di Riferimento in cui verranno fornite le
soluzioni per i restanti parametri realmente stimabili. Nel problema
della rete di livellazione questo equivale ad attribuire la quota
“zero” ad uno dei punti della rete stessa.
Tale approccio è quello seguito, appunto, nella definizione dei
Sistemi di Riferimento, globali o nazionali.
2. Si riformula il problema aggiungendo nuove osservazioni sui
parametri non stimabili; ad esempio, nella rete di livellazione,
misurando direttamente la quota di uno o più punti ed inserendo le
relative equazioni di osservazione nel sistema. Tipicamente,
nell’ambito delle reti geodetiche, tali osservazioni aggiuntive, dette
anche pseudoosservazioni, non sono (non possono essere)
ottenute direttamente, ma derivano da fonti esterne, che abbiano
risolto a monte il problema di definire un Sistema di Riferimento.
Soluzione del problema
Siano risolti i problemi di deficienza di rango:
si hanno le seguenti stime.
Stima dei parametri incogniti:
xˆ N 1AT Q 1y o ;
stima delle osservabili e degli scarti:
yˆ Axˆ PA y 0
εˆ yˆ o yˆ (I PA )y 0 PA y 0
La ridondanza e le stime di covarianza
Ridondanza: differenza fra numero di osservazioni
e numero di parametri incogniti,
detta anche numero di gradi di libertà:
R mn
stima del 02 :
T
1
ˆ
ε
Q
εˆ
2
ˆ
0
mn
stima della matrice di covarianza dei parametri:
C xxˆˆ ˆ 02 N 1 ;
stima della matrice di covarianza delle osservabili:
C yyˆˆ ˆ 02 AN 1AT ;
stima della matrice di covarianza degli scarti
Cεεˆˆ ˆ 02 (Q AN 1AT )
Gli errori di modello
Possono essere su tutto il modello ma tipicamente sono su singole
osservazioni: comportano stime errate dei parametri incogniti.
Esistono algoritmi per:
verificare a posteriori la correttezza globale dei modelli adottati
(test del modello globale);
identificare eventuali errori di modello su singole osservazioni
(identificazione degli outlier e data snooping);
identificare l’affidabilità dei risultati di una compensazione.
La verifica statistica di ipotesi
E' un’operazione che consente di stabilire se, statisticamente,
ovvero con una certa probabilità di errore, valga una certa ipotesi
H0.
Si costruisce una statistica campionaria che, sotto l’ipotesi H 0 ,
debba seguire una distribuzione nota;
che viceversa, qualora H 0 sia sbagliata, vada ad assumere valori
“grandi”, ovvero non accettabili statisticamente;
si confronta quindi la statistica campionaria con
i valori limite ammessi dalla sua distribuzione teorica.
La verifica di ipotesi per i dati e le reti geodetiche
Nell’elaborazione dei dati grezzi (ad esempio le osservazioni GPS)
e nella compensazione di reti geodetiche tipicamente vi sono
outlier dovuti:
1. all’approssimata conoscenza del modello stocastico delle
osservazioni (vengono ipotizzate più accurate e meno correlate di
quanto non siano in realtà);
2. alla presenza di isolati e grossolani errori di modello
deterministico
(termini di disturbo di entità significativa e non modellizzabili
multipath per il GPS, errori grossolani di stazionamento,…).
Prima si verifica la correttezza del modello globale,
poi si individuano eventuali outlier,
infine si corregge il modello stocastico.
La verifica in generale
x
H 0 : y Ax, H a : y A A
x
R { A A } R {A},
dim R { A A } m b
Si possono costruire le seguenti
grandezze
λ AT Q1 (I A( AT A)1 AT Q1 )y 0
Qλλ AT Q 1 (I A( AT A) 1 AT Q 1 ) A
T
x
Q x
2
T
1
λ Q λ , b
02
Sotto H0
2
λ 2
λ
b2
E 2 1, 2 Fb,
,
0b
b
0 b
sotto Ha
2
λ 2
b λ
E 2 1 , 2 Fb , ,b
b 0b
0 b
Esecuzione del test
Scelgo la significatività del test; fisso Flim tale che
λ 2
P 2 Flim | H 0
0 b
Se
λ
2
b
2
0
Flim
rigetto H0
La significatività del test è la probabilità di sbagliare rigettando H0.
Visione speculare
λ 2
P 2 Flim | H a 1
0 b
,
significatività del test,
rischio di sbagliare rigettando
H0;
,
potenza,
rischio di sbagliare
accettando H0.
La potenza di un test è funzione dell’errore che vorrei evidenziare
nel test!
Il test del o test globale sul modello
2
Ipotesi fondamentale
H 0 : y Ax.
Ipotesi alternativa
x
H a : y A A
x
con R { A A } R m
Se H0 è vera
( mn )
εT Q 1ε
2
~
2
0 ( m n) 0 ( m n) m n
λ
2
2
Statistica di test:
ˆ 02
2
m
n
(
)
sp
2
0
sia il livello
di significatività del test;
2
m2 n ( )
sia lim
il valore teorico tale che
2
P(0 m2 n lim
) 1
2
H0 viene accettata;
se sp2 lim
2
se sp2 lim
H0 viene rigettata: sono presenti errori di modello.
Esempio
Sia stata effettuata una compensazione di 10 osservazioni in 2
incognite; a fronte di un 02 1cm2 dichiarato a priori si sia ottenuto
un ˆ 02 2.375cm2 .
Sia fissato 5% : 1 95% 0.95 ;
dai dati precedenti si ricava (m n) 8 ;
2
82 (0.05) 15.5
il lim
2
ˆ
2.375
2
0
sp (m n) 2 8
19 15.5
0
1
Il test non è superato: quindi vi è, a un livello di probabilità del
95%, un errore di modello.
Se si fosse fissato 1% , si sarebbe ottenuto
2
lim
82 (0.01) 20.1 sp2
ovvero vi sono errori di modello a livello di significatività 5%,
ma non a livello di significatività 1%.
Il test locale sulla singola osservazione
Serve per identificare errori di modello deterministico su una
singola osservazione yiO :
Ipotesi fondamentale H 0 : y Ax.
Ipotesi alternativa:
x
T
H a : y A ei , ei 0 ... 1 0 ... 0
i
ovvero un singolo errore su una singola osservazione.
Sotto H0
λ
2
02b
λ
2
~ (1)
2
b
2
0
zsp ~ N [0,1] Z
Se si adotta la semplificazione di Q diagonale la precedente
diviene semplicemente
ˆi
zsp
~Z
i
(test sui residui normalizzati)
Se H0 è vera: zsp ~ N[0,1]
si confronta zsp con i valori limite della normale standardizzata;
Quindi, definito zlim il valore teorico tale che
P (0 z zlim ) 1 , P ( z zlim )
se z zlim H0 viene accettata; se z zlim H0 viene rigettata.
Affidabilità dei test
Sotto Ha zsp ~ N [
Q ii i
0
,1]
Per effettuare il
test ho fissato
un valore zlim :
dato i , ovvero
l’errore che
vorrei
evidenziare, è numericamente possibile calcolare
zlim
Q ii i
,1] 1
N[
0
ovvero la potenza del test rispetto all’errore i .
Si decide il valore di : si determina zlim
si decide il valore : si trova i
zlim
tale che
N[
Q ii i
0
,1] 1 .
(calcolo numerico complesso)
Quale è il massimo errore nascosto,
ovvero non rilevabile con potenza ,
nell’osservazione i-esima?
Q ii
i f ( , )
0
i f ( , )
0
Q ii
quindi
f ( , )
0
eTi Q 1 (I AN 1AT Q 1 )ei
Nuovamente con la semplificazione Q diagonale
i f ( , )
y
i
eTi (I AN 1AT )ei
Si ricorda che
(I AN 1AT ) PA
definiamo la ridondanza locale dell’osservazione i-esima
eTi (I AN 1AT )ei PA ii ri
si hanno due casi limite
ri 0 : i ; ri 1: i min
Affidabilità interna dell’osservazione i-esima:
massimo errore nascosto i .
Peggior affidabilità interna: max i
i
Affidabilità esterna
Dato un errore nascosto i nell’osservazione i-esima,
come influisce sulla stima dei parametri incogniti?
δxˆ ( i ) N 1AT Q1ei i
Si hanno due casi limite
ri 0 : PAii 1: ei i R ( A ) N ( AT )
tutto l’errore si scarica nelle stime delle incognite.
ri 1: PAii 0 : ei i N ( AT ) R ( A )
l’errore non si scarica nelle stime delle incognite.
Affidabilità interna dell’osservazione i-esima:
massimo errore nascosto i .
Peggior affidabilità interna:
max i
i
Affidabilità esterna del parametro x j :
xˆ j max( xˆ j ( i ))
i
Peggior affidabilità esterna:
xˆ max( xˆ j )
j
In effetti la non robustezza dei MQ rende complicata
l’identificazione degli outlier poiché un outlier modifica anche gli
scarti delle altre osservazioni; inoltre la presenza di un outlier può
influire sulla stima del ̂ 02 , che quindi risulta non attendibile.
E’ tipicamente adottato un procedimento iterativo (data snooping).
Innanzitutto si verifica l’esistenza di osservazioni isolate cui
corrispondano scarti inaccettabili rispetto all’accuratezza
strumentale.
Se ve ne sono, vengono eliminate una per una, partendo dalla più
grande, ricompensando ogni volta i dati e verificando la
convergenza del test sul modello globale.
Se la precedente analisi non evidenzia casi di evidenti outlier
si costruiscono i residui (pseudo) normalizzati
ˆi
ˆi
oppure
Qee ii
0 Qee ii
Anziché confrontare i residui normalizzati con un valore limite, si
effettua un confronto relativo fra residui (pseudo) normalizzati; se
ve ne è uno significativamente più grande degli altri, si elimina
l’osservazione corrispondente, ricompensando i dati.
Si procede iterativamente; verificando la convergenza del test sul
modello globale.
Si devono poi controllare le osservazioni eliminate (calcolando i
loro scarti) per eliminarle definitivamente o reintrodurle.
Qualora il test sul modello globale non venga superato
ma non vi siano sospetti outlier (ovvero una situazione con scarti
normalizzati omogenei) vi è tipicamente un problema di sottostima
generale degli elementi della matrice di covarianza delle
osservazioni (sovrastima delle precisioni).
Accuratezza dei parametri stimati
Sono stati eseguiti il test globale sul modello e il data snooping con
esiti positivi.
Si considera ora la stima dei parametri, x̂ e della relativa matrice di
covarianza C xxˆˆ ˆ 02 N 1 .
Ci si chiede quale sia la regione di confidenza per il valore vero dei
parametri incogniti, ovvero la regione dello spazio n-dimensionale
alla quale il vettore x appartiene con livello di probabilità
assegnata.
La regione di confidenza per il vettore dei parametri incogniti ad un
certo livello di probabilità 1- è data dalla
(x xˆ )T Cxxˆˆ1 (x xˆ ) Fn ,( mn ) ( )
ove Fn ,( mn ) ( ) è il valore della distribuzione di Fisher a n,(m n)
gradi di libertà, corrispondente alla probabilità 1 ;
in genere si scelgono i valori 0.01, 0.05, 0.10, ovvero (
1 : 0.99, 0.95, 0.90.
Per analizzare la regione di confidenza di ξ :
si estrae dal vettore x̂ il sottovettore ξ̂ corrispondente ai parametri
ξ di interesse; quindi si estrae dalla matrice di covarianza totale
C xxˆˆ la matrice di covarianza del vettore ξ̂ , Cˆ ˆ ;
12 12
x1
x
2
2
sia x 2 , C xxˆ ˆ 21
...
...
...
x
n
n1 n 2
... 1n
... 2 n
... ...
2
... n
i2 ij
xi
se ad esempio ξ si ha Cˆ ˆ
2
x
j
ji j
la regione di confidenza con probabilità 1 per il vettore ξ è data
dalla
(ξ ξˆ )T (Cξξˆ ˆ ) 1 (ξ ξˆ ) Fr ,( mn ) ( )
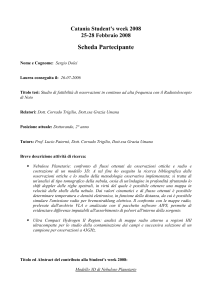
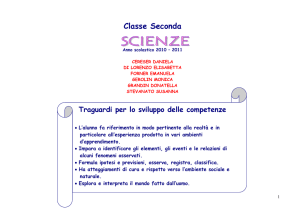
Ad esempio, nel caso di una compensazione di rete geodetica,
tipicamente si vuole conoscere per ogni punto la regione
tridimensionale di confidenza delle coordinate [ X P , YP , Z P ] del
punto stesso. La regione di confidenza in questo caso è data da un
ellissoide centrato in [ Xˆ P , YˆP , Zˆ P ], i cui parametri (semiassi e relative
direzioni) dipendono dalla matrice di covarianza delle stime delle
coordinate del punto.
Ellissoide di confidenza in tre dimensioni
Ludovico Biagi
Politecnico di Milano, DIIAR
[email protected]
materiale didattico in varia forma sotto
http://geomatica.como.polimi.it