TEMA N.1 [8 punti] Sono assegnate la trasformazione
f1 (p1 , p2 , p3 )
=
f2 (p1 , p2 , p3 )
=
f3 (p1 , p2 , p3 )
=
√
√
1 + p21 − 7p1 /8 − 3 3p2 /8 + 2 3p3
√
3 3p1 /4 + 13p2 /4 + 9p31
√
1 + p22 − 7 3p1 /8 + 7p2 /8 − 2p3
ed il punto q(0, −1, 1).
• si scriva la trasformazione omogenea con cui f si identifica nell’intorno di q, a meno di termini o(||p − q||)
• si rappresenti la trasformazione omogenea trovata sopra come composizione di uno stiramento a partire da q,
di una rotazione intorno a q e di una traslazione
• si calcolino asse ed angolo della rotazione intorno a q
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 1.
• Si dimostri che essa risulta isostatica. Si consiglia di ricopiare la struttura nel riquadro sottostante, ed eseguire sulla copia le eventuali costruzioni necessarie
• Si determini la reazione esplicata dal pendolo interno B applicando il metodo di Lagrange. Si riportino le
costruzioni necessarie, compresi tutti i centri e le catene cinematiche, nello schema di figura 1. Si riporti nel
riquadro sottostante l’equazione che fornisce la reazione richiesta
• Si determini la reazione esplicata dal doppio-doppio pendolo esterno D applicando il metodo di Lagrange. Si
riportino le costruzioni necessarie, compresi tutti i centri e le catene cinematiche, nello schema di figura 2. Si
riporti nel riquadro sottostante l’equazione che fornisce la reazione richiesta
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si enunci e si dimostri il principio delle forze virtuali
• Si enunci e si dimostri la formula di Rodrigues
Figura 1:
Figura 2:
TEMA N.1 [8 punti]
È fissato il riferimento cartesiano (O, x, y, z). I versori degli assi sono denotati con i, j, k, rispettivamente. È
assegnato un corpo rigido di densità uniforme ρ, la cui configurazione, in un fissato istante t, è la regione Bt =
{(x, y, z) ∈ R3 : R2 /4 ≤ (y − 2R)2 + (z − R)2 + x2 ≤ R2 }, con R costante positiva assegnata. È noto che all’istante
t l’atto di moto risulta: v(x, t) = β[(x − z)j + (R + y)k − yi], con β costante assegnata. Il corpo è soggetto a forze
di volume b = γ(k + 2i), con γ costante assegnata, ed a forze di superficie s(n) = γR−1 [(x2 + (y − 2R)2 )i + z 2 k]
sul bordo esterno, risultando invece scarico sul bordo interno. Si determinino, all’istante considerato t:
• Un riferimento centrale di inerzia (α, f1 , f2 , f3 ) (si chiede qui di disegnare la configurazione Bt e di scrivere i
vettori α − O, f1 , f2 , f3 in termini di i, j, k)
• La velocità del centro di massa α̇(t) e la velocità angolare ω
• il tensore di inerzia Jα (t), la quantità di moto l(B, t), il momento della quantità di moto nel riferimento del
centro di massa aα (B, t), l’energia cinetica K(B, t)
• La risultante ed il momento risultante rispetto al centro di massa delle forze di volume e delle forze di superficie
• L’accelerazione del centro di massa e la derivata temporale della velocità angolare
• Il campo spaziale di accelerazione
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 1. Si tracci il diagramma del momento flettente, procedendo per via
grafica ed utilizzando una scala uniforme in tutto il diagramma. Preliminarmente, sarà necessario determinarne
le reazioni vincolari, anch’esse per via grafica. Si indichino con chiarezza le equazioni simboliche di equilibrio di
ciascun corpo. Si indichino gli eventuali equilibri di insiemi di corpi che risultino utili nella soluzione. La risultante
di due o più forze o coppie che sia necessario determinare nel tracciamento del diagramma del momento dovrà
essere eseguita basandosi su considerazioni di equilibrio, ed evidenziata tramite opportune parentesi nella scrittura
delle equazioni simboliche di equilibrio, e NON dalla composizione delle forze, che potrà, al più, essere utilizzata per
verifica. Ogni retta di applicazione, di una forza o di un insieme di forze, dovrà indicate la/e forza/e cui si riferisce.
La costruzione grafica relativa ai nodi tripli, P e Q, dovrà essere eseguita per ciascun tratto ivi convergente. In
particolare, l’equilibrio dei momenti nel nodo triplo NON deve essere utilizzato nella costruzione. Tale equilibrio
DOVRÀ, invece, essere esibito a verifica della correttezza del diagramma, utilizzando appositi schemi a margine.
Per ciascun tratto deve essere chiaramente evidenziato nella costruzione grafica il punto di nullo del diagramma,
se presente. Si consiglia di tracciare a tratteggio gli eventuali diagrammi “falsi”, e di campire il diagramma finale.
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si dimostri il teorema di allineamento dei centri relativi
• Si enunci e si dimostri il teorema degli spostamenti virtuali (per corpi continui)
Figura 1:
TEMA N.1 [8 punti]
Un continuo, avente quale configurazione di riferimento una regione semplicemente connessa, è soggetto al campo
di deformazione infinitesima, nel riferimento (O, x, y, z):
εx
εy
εz
γxy
γxz
γyz
=
=
=
=
=
=
exp(αy)
αx
exp(αy)
α[x exp(αy) + y]
0
αz exp(αy)
essendo α una costante assegnata.
• si dimostri che esso risulta congruente
• si trovino il vettore ed il tensore della rotazione infinitesima, assumendo che essi si annullino nell’origine
• si determini il campo di spostamento, assumendo che esso si annulli nell’origine
• si verifichi che da esso discende il campo di deformazione prima trovato
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 1, costituita da una maglia reticolare quadrata ABCD di lato `, il cui
nodo A risulta vincolato ad un carrello con piano di scorrimento inclinato di un angolo α. Le aste sono prive di
massa; nei nodi, sono concentrate masse puntiformi uguali m (indicate con un cerchietto in retino grigio). Sulla
struttura agisce la molla lineare OA, di rigidezza k, scarica quando la sua lunghezza risulta nulla. La struttura è
posta in un piano verticale. Si assumano, quali parametri lagrangiani, l’ascissa rettilinea ξ e l’angolo θ indicati. Si
determinino:
• la posizione, la velocità e l’accelerazione dei nodi
• l’energia potenziale e l’energia cinetica della struttura
• le equazioni del moto
• le configurazioni di equilibrio
• la reazione vincolare del carrello in A
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si presenti un esempio di applicazione del metodo delle sezioni di Ritter per una travatura reticolare isostatica
(è data facoltà allo studente di scegliere la struttura reticolare che preferisce) caricata da una forza in un nodo
• Si enunci e si dimostri la legge di bilancio della potenza nel volume di controllo
Figura 1:
TEMA N.1 [8 punti]
Lo stato tensionale T in un punto P di un continuo in equilibrio è rappresentato dalla matrice
√
√
2
3 6 −3 6
√
1
T = 3 √6 −13
−3
4
−3 6 −3
−13
nel riferimento cartesiano (O, x, y, z). Si determinino:
√
• il vettore tensione sulla giacitura ortogonale alla retta di equazione z − x 3 = 0, x + y = 0, nonché le
componenti normale e tangenziale di tensione
• le tensioni principali ed un riferimento principale di tensione
• si disegni l’arbelo di Mohr, e si evidenzino i punti di estremo delle tensioni normali, indicando le corrispondenti giaciture
• la massima tensione tangenziale ed almeno una giacitura su cui essa agisce, rappresentata nel riferimento
(O, x, y, z)
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 1. Si tracci il diagramma del momento flettente, procedendo per via
grafica ed utilizzando una scala uniforme in tutto il diagramma. Preliminarmente, sarà necessario determinarne
le reazioni vincolari, anch’esse per via grafica. Si indichino con chiarezza le equazioni simboliche di equilibrio di
ciascun corpo. Si indichino gli eventuali equilibri di insiemi di corpi che risultino utili nella soluzione. La risultante
di due o più forze o coppie che sia necessario determinare nel tracciamento del diagramma del momento dovrà
essere eseguita basandosi su considerazioni di equilibrio, ed evidenziata tramite opportune parentesi nella scrittura
delle equazioni simboliche di equilibrio, e NON dalla composizione delle forze, che potrà, al più, essere utilizzata
per verifica. Ogni retta di applicazione, di una forza o di un insieme di forze, dovrà indicate la/e forza/e cui si
riferisce. La costruzione grafica relativa al nodo triplo dovrà essere eseguita per ciascun tratto ivi convergente. In
particolare, l’equilibrio dei momenti nel nodo triplo NON deve essere utilizzato nella costruzione. Tale equilibrio
DOVRÀ, invece, essere esibito a verifica della correttezza del diagramma, utilizzando appositi schemi a margine.
Per ciascun tratto deve essere chiaramente evidenziato nella costruzione grafica il punto di nullo del diagramma,
se presente. Si consiglia di tracciare a tratteggio gli eventuali diagrammi “falsi”, e di campire il diagramma finale.
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si deducano le condizioni di salto delle caratteristiche della sollecitazione interna vettoriali e scalari della
trave piana rettilinea per effetto di forza e coppia concentrata
• Si enunci il teorema di Cauchy. Se ne presenti la dimostrazione, limitatamente alla parte che ha per tesi la
simmetria del tensore degli sforzi
Figura 1:
TEMA N.1 [8 punti]
È assegnato il seguente campo di spostamento:
u1 (p1 , p2 , p3 )
= p1 (cos(αp3 ) − 1) − p2 sin(αp3 )
u2 (p1 , p2 , p3 )
= p2 (cos(αp3 ) − 1) + p1 sin(αp3 )
u3 (p1 , p2 , p3 )
= αp23 (1 + αp1 )
con α parametro assegnato.
• si calcolino il tensore destro di deformazione di Cauchy-Green ed il tensore di deformazione infinitesima, nel
punto q = (R, R, 0);
• si calcoli la dilatazione lineare, sia in teoria esatta che in teoria approssimata, nel punto q, nella direzione del
primo versore di base
• si calcoli lo scorrimento, sia in teoria esatta che in teoria approssimata, nel punto q, fra le direzioni del primo
e del terzo versore di base
• si calcoli la dilatazione areale, sia in teoria esatta che in teoria approssimata, nel punto q, sulla giacitura
parallela al piano p1 , p3
• si calcoli la dilatazione volumetrica, sia in teoria esatta che in teoria approssimata, nel punto q
TEMA N.2 [8 punti]
Il sistema meccanico riportato in figura 1, posto in un piano verticale, è costituito dall’asta rigida pesante OA di
lunghezza 2R e densità di massa, uniforme, ρ = m/R, incernierata a terra nel punto O. Ad essa risulta fissata
solidalmente una guida circolare priva di massa, avente raggio R/2, collegata all’asta in corrispondenza dell’estremo
A in modo tale che la congiungente OA passa per il centro della guida C. Su questa guida scorre senza attrito
una massa puntiforme m la cui posizione è indicata dal punto B. Nel baricentro dell’asta G è applicata una forza
elastica esterna per mezzo di una molla lineare di rigidezza k, posta sulla verticale per G e collegata ad un carrello
con piano di scorrimento orizzontale distante R da O. La massa m in B e l’estremo A dell’asta sono soggetti ad
una forza elastica interna esplicata da una molla lineare di rigidezza 2k. Le molle risultano scariche quando hanno
lunghezza nulla. Si assumano quali coordinate lagrangiane del sistema i parametri indicati θ1 = θ1 (t) e θ2 = θ2 (t)
e si utilizzino per lo svolgimento i versori dell’asta OA e della congiungente CB, indicati in figura con e1 ed e2 ,
rispettivamente. Si verifichi che il sistema ha due gradi di libertà e si determinino:
• la posizione, la velocità e l’accelerazione dei punti A, B e G in funzione di θ1 e θ2
• l’energia potenziale e l’energia cinetica della struttura
• le equazioni del moto
• le configurazioni di equilibrio
• la reazione vincolare della cerniera O
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• È assegnato un sistema costituito da tre forze applicate non nulle. Si provi che condizione necessaria affnchè
esso risulti in equilibrio è che la risultante sia nulla e le rette di applicazione delle forze siano complanari e
concorrenti in un punto proprio o improprio.
• Si enuncino e si dimostrino le equazioni di congruenza interna (condizione necessaria e condizione sufficiente)
TEMA N.1 [8 punti]
È assegnato il seguente campo di spostamento:
u1 (p1 , p2 , p3 ) = p1 (cos(αp3 ) − 1) − p2 sin(αp3 )
u2 (p1 , p2 , p3 ) = p2 (cos(αp3 ) − 1) + p1 sin(αp3 )
u3 (p1 , p2 , p3 ) = αp23 (1 + αp1 )
con α parametro assegnato.
• si calcolino il tensore destro di deformazione di Cauchy-Green ed il tensore di deformazione infinitesima, nel
punto q = (R, R, 0);
• si calcoli la dilatazione lineare, sia in teoria esatta che in teoria approssimata, nel punto q, nella direzione del
primo versore di base
• si calcoli lo scorrimento, sia in teoria esatta che in teoria approssimata, nel punto q, fra le direzioni del primo
e del terzo versore di base
• si calcoli la dilatazione areale, sia in teoria esatta che in teoria approssimata, nel punto q, sulla giacitura
parallela al piano p1 , p3
• si calcoli la dilatazione volumetrica, sia in teoria esatta che in teoria approssimata, nel punto q
TEMA N.2 [8 punti]
Il sistema meccanico riportato in figura 1 è posto in un piano orizzontale. Il sistema è costituito dall’asta rigida
pesante OA di lunghezza 4R, incernierata a terra nel punto O e dotata di densità di massa, uniforme, ρ = m/R.
Ad essa risulta fissata solidalmente una guida circolare di raggio R, priva di massa, il cui centro C appartiene
alla normale all’asta per il suo baricentro G. Su questa guida scorre senza attrito una massa puntiforme m la
cui posizione è indicata dal punto B. Sull’estremo A dell’asta è fissata una massa puntiforme 2m. I punti A e
B sono soggetti ad una forza elastica interna esplicata da una molla lineare di rigidezza k. Il punto A è soggetto
ad una forza elastica esterna esplicata da una molla lineare di rigidezza k fissata al punto D, la cui posizione
è (D − O) = 8Ri. Le molle risultano scariche quando hanno lunghezza nulla. Si assumano quali coordinate
lagrangiane del sistema i parametri indicati θ1 = θ1 (t) e θ2 = θ2 (t) e si utilizzino per lo svolgimento i versori
dell’asta OA e della congiungente CB, indicati in figura con e1 ed e2 , rispettivamente. Si verifichi che il sistema
ha due gradi di libertà e si determinino:
• la posizione, la velocità e l’accelerazione dei punti A, B e G in funzione di θ1 e θ2
• l’energia potenziale e l’energia cinetica della struttura
• le equazioni del moto
• le configurazioni di equilibrio
• la reazione vincolare della cerniera O
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si enunci e si dimostri il principio delle forze virtuali per sistemi rigidi.
• Si enuncino e si dimostrino le equazioni di congruenza interna (condizione necessaria e condizione sufficiente)
Figura 1:
TEMA N.1 [8 punti]
È assegnata la struttura in figura 1. Si determinino:
• La matrice E dei coefficienti delle equazioni di equilibrio ed il grado di iperstaticità (indicando con chiarezza
i parametri assunti per descrivere le reazioni vincolari).
• La matrice C dei coefficienti delle equazioni di compatibilità ed il grado di labilità (indicando con chiarezza
i descrittori cinematici del campo di spostamento)
• I diagrammi delle componenti degli spostamenti compatibili con i vincoli perfetti
• Le reazioni vincolari autoequilibrate
• Assegnato il carico riportato in figura 1, si determinino i valori del parametro α che garantiscono l’equilibrio
della struttura, in applicazione del PSV
• Si determinino le condizioni che devono essere soddisfatte dai cedimenti vincolari indicati in figura 2 affinchè
si abbia congruenza, in applicazione del PFV
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 3. Si tracci il diagramma del momento flettente, procedendo per via
grafica ed utilizzando una scala uniforme in tutto il diagramma. Preliminarmente, sarà necessario determinare
le reazioni vincolari, anch’esse per via grafica. Si indichino con chiarezza le equazioni simboliche di equilibrio di
ciascun corpo. Si indichino gli eventuali equilibri di insiemi di corpi che risultino utili nella soluzione. La risultante
di due o più forze o coppie che sia necessario determinare nel tracciamento del diagramma del momento dovrà
essere eseguita basandosi su considerazioni di equilibrio, ed evidenziata tramite opportune parentesi nella scrittura
delle equazioni simboliche di equilibrio, e NON dalla composizione delle forze, che potrà, al più, essere utilizzata per
verifica. Ogni retta di applicazione, di una forza o di un insieme di forze, dovrà indicare la/e forza/e cui si riferisce.
La costruzione grafica relativa ai nodi tripli, P e Q, dovrà essere eseguita per ciascun tratto ivi convergente. In
particolare, l’equilibrio dei momenti nel nodo triplo NON deve essere utilizzato nella costruzione. Tale equilibrio
DOVRÀ, invece, essere esibito a verifica della correttezza del diagramma, utilizzando appositi schemi a margine.
Per ciascun tratto deve essere chiaramente evidenziato nella costruzione grafica il punto di nullo del diagramma,
se presente. Si consiglia di tracciare a tratteggio gli eventuali diagrammi “falsi”, e di campire il diagramma finale.
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si enunci e si dimostri il principio degli spostamenti virtuali
• Cosa può essere dedotto dalla condizione C12∞ ≡ C23∞ ̸= C13 soddisfatta dai centri relativi? Si giustifichi la
risposta
Figura 1:
Figura 2:
TEMA N.1 [8 punti]
Sia (e1 , e2 , e3 ) un riferimento ortonormale. È assegnato l’atto di moto rigido caratterizzato da:
v(O, t) = αt2 e2 + γt3 e1 ,
ω = βe3
ed il campo scalare, in descrizione spaziale
Φ(x, t) = t2 x2 x3 .
• si determinino l’atto di moto ed il campo di accelerazione in descrizione spaziale
• si calcoli la derivata temporale sostanziale di Φ
• si determini il moto, assumendo che risulti B ≡ Bo
• si scriva la relazione che lega il tensore R di rotazione ed il tensore W (gradiente spaziale dell’atto di moto),
e si verifichi che essa risulta soddisfatta nel caso in esame
TEMA N.2 [8 punti]
Il sistema meccanico riportato in figura 1 è costituito dall’asta rigida AB di lunghezza l, priva di massa ed incernierata a terra nel punto A e dall’asta rigida DE di lunghezza l/2, dotata di massa con densità uniforme ρ = m/l
ed incernierata a terra nel punto D. Nel punto C, centro dell’asta AB, è fissata una massa puntiforme m. Il
sistema si trova in un piano verticale, ed è inoltre soggetto alle forze esplicate dalle molle elastiche lineari BE, OB
ed OE, aventi, rispettivamente, rigidezza 2k, k e k. Le molle risultano scariche quando hanno lunghezza nulla. Si
assumano quali coordinate lagrangiane del sistema i parametri indicati θ1 e θ2 . Si determinino:
• la posizione, la velocità e l’accelerazione dei punti B, C, E e G
• l’energia potenziale e l’energia cinetica della struttura
• le equazioni del moto
• il momento flettente in corrispondenza del punto C ed il diagramma del momento flettente sull’asta AB
• la reazione vincolare della cerniera D
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si deducano le condizioni di salto dei vettori R ed MS in corrispondenza di una sezione caricata da una forza
F e da una coppia C
• Si dimostri che una trasformazione che conserva le lunghezze delle curve conserva anche le distanze fra coppie
di punti
Figura 1:
TEMA N.1 [8 punti]
Un continuo, avente quale configurazione di riferimento una regione semplicemente connessa, è soggetto al campo
di deformazione infinitesima, nel riferimento (O, x, y, z):
εx
= αy
εy
εz
= αx cos(αy)
= cos(αy)
γxy
γxz
γyz
= αx + sin(αy)
= 0
= −αz sin(αy)
essendo α una costante assegnata.
• si dimostri che esso risulta congruente
• si trovino il vettore ed il tensore della rotazione infinitesima, assumendo che essi si annullino nell’origine
• si determini il campo di spostamento, assumendo che esso si annulli nell’origine
• si verifichi che da esso discende il campo di deformazione prima trovato
TEMA N.2 [8 punti]
È assegnata la struttura riportata in figura 1. Si tracci il diagramma del momento flettente, procedendo per via
grafica ed utilizzando una scala uniforme in tutto il diagramma. Preliminarmente, sarà necessario determinare
le reazioni vincolari, anch’esse per via grafica. Si indichino con chiarezza le equazioni simboliche di equilibrio di
ciascun corpo. Si indichino gli eventuali equilibri di insiemi di corpi che risultino utili nella soluzione. La risultante
di due o più forze o coppie che sia necessario determinare nel tracciamento del diagramma del momento dovrà
essere eseguita basandosi su considerazioni di equilibrio, ed evidenziata tramite opportune parentesi nella scrittura
delle equazioni simboliche di equilibrio, e NON dalla composizione delle forze, che potrà, al più, essere utilizzata per
verifica. Ogni retta di applicazione, di una forza o di un insieme di forze, dovrà indicare la/e forza/e cui si riferisce.
La costruzione grafica relativa ai nodi tripli, R e Q, dovrà essere eseguita per ciascun tratto ivi convergente. In
particolare, l’equilibrio dei momenti nel nodo triplo non deve essere utilizzato nella costruzione. Tale equilibrio
devrà, invece, essere esibito a verifica della correttezza del diagramma, utilizzando appositi schemi a margine. Per
ciascun tratto deve essere chiaramente evidenziato nella costruzione grafica il punto di nullo del diagramma, se
presente. Si consiglia di tracciare a tratteggio gli eventuali diagrammi “falsi”, e di campire il diagramma finale.
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si deducano le equazioni di Lagrange
• Si enunci e si dimostri il teorema dei lavori virtuali per corpi continui
Figura 1:
TEMA N.1 [8 punti] Sono assegnate la trasformazione
√
1 + p23 − 7 3p2 /8 + 7p3 /8 − 2p1
√
√
f2 (p1 , p2 , p3 ) = 1 + p22 − 7p2 /8 − 3 3p3 /8 + 2 3p1
√
f3 (p1 , p2 , p3 ) = 3 3p2 /4 + 13p3 /4 + 9p32
f1 (p1 , p2 , p3 ) =
ed il punto q(1, 0, −1).
• si scriva la trasformazione omogenea con cui f si identifica nell’intorno di q, a meno di termini o(||p − q||)
• si rappresenti la trasformazione omogenea trovata sopra come composizione di uno stiramento a partire da q,
di una rotazione intorno a q e di una traslazione
• si calcolino asse ed angolo della rotazione intorno a q
TEMA N.2 [8 punti]
È assegnata la trave reticolare riportata in figura 1 (le aste orizzontali e verticali hanno lunghezza l). Si dimostri
che essa risulta isostatica.
• Si calcoli lo sforzo normale nell’asta GE utilizzando il metodo di Lagrange. Si disegnino in figura 1 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
• Si calcoli lo sforzo normale nell’asta BE utilizzando il metodo di Lagrange. Si disegnino in figura 2 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
• Si calcolino gli sforzi normali nelle aste GE e BE utilizzando il metodo delle sezioni di Ritter. Si tracci in figura 3 la sezione a tal fine utilizzata, e si riportino nel riquadro sottostante le equazioni utilizzate nella soluzione
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si dimostri che gli operatori di equilibrio e compatibilità cinematica sono l’uno il trasposto dell’altro.
• Si scriva e si dimostri l’espressione della derivata temporale del determinante dello jacobiano: (det F)˙
Figura 1:
Figura 2:
Figura 3:
TEMA N.1 [8 punti]
Sia (e1 , e2 , e3 ) un riferimento ortonormale. È assegnato l’atto di moto:
v(x, 𝑡) = 𝛾[(3𝑥1 + 𝛾𝐿𝑡)e1 + (4𝑥2 − 3𝑥3 )e2 + (6𝑥2 − 5𝑥3 )e3 ]
con 𝛾 ed 𝐿 parametri fissati, ed il campo scalare, in descrizione spaziale
Φ(x, 𝑡) = 𝑡𝑥2 𝑥3 .
∙ si determini il campo di accelerazione in descrizione spaziale e la derivata temporale sostanziale di Φ
∙ si determini il moto, assumendo che risulti ℬ ≡ ℬ𝑜
∙ si determini la mappa di riferimento (suggerimento: si esprimano dapprima 2𝑝2 − 𝑝3 e 𝑝3 − 𝑝2 in funzione di
𝑥2 , 𝑥3 )
∙ assumendo che la configurazione di riferimento sia omogenea con densità 𝜌0 , si calcoli la densità 𝜌(𝑥, 𝑡)
TEMA N.2 [8 punti]
È assegnata la trave reticolare riportata in figura 1. Si dimostri che essa risulta isostatica.
∙ Si calcoli lo sforzo normale nell’asta 𝐸𝐶 utilizzando il metodo di Lagrange. Si disegnino in figura 1 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
∙ Si calcoli lo sforzo normale nell’asta 𝐸𝐺 utilizzando il metodo di Lagrange. Si disegnino in figura 2 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
∙ Si calcolino gli sforzi normali nelle aste 𝐸𝐶 ed 𝐸𝐺 utilizzando il metodo delle sezioni di Ritter. Si tracci in figura 3 la sezione a tal fine utilizzata, e si riportino nel riquadro sottostante le equazioni utilizzate nella soluzione
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
∙ Si dimostri la relazione 3𝑡 − 𝑠 = 𝑙 − 𝑖 richiamando la definizione delle grandezze in essa contenute.
∙ Si enunci e si dimostri il teorema del trasporto di Reynolds.
Figura 1:
Figura 2:
Figura 3:
TEMA N.1 [8 punti]
Sia (i, j, k) un riferimento ortonormale e sia x = xi + yj + zk il vettore posizione. È assegnato un continuo in moto,
caratterizzato da densità ρ(x, t) = ρo costante, atto di moto
v(x, t) = (αx + β)j
e stato tensionale
T(x, t) = 2µD
con α, β, µ costanti e D la parte simmetrica del gradiente spaziale dell’atto di moto. Si consideri la regione di
controllo R = {(x, y, z) : x2 + z 2 ≤ R2 , 0 ≤ y ≤ H}, con R e H costanti positive assegnate. Si determini:
• lo stato tensionale ed il campo di accelerazione
• le forze di volume e la loro risultante in R
• per ciascuna delle basi di R e per il mantello laterale, le forze di superficie e la loro risultante
• la quantità di moto posseduta dalla massa contenuta entro R e la sua derivata temporale
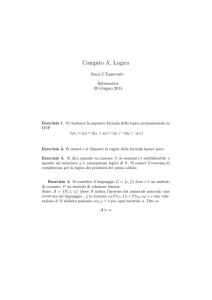
TEMA N.2 [8 punti]
È assegnata la trave reticolare in figura 1. Tutte le aste hanno la medesima lunghezza l.
• Si calcoli lo sforzo normale nell’asta BC utilizzando il metodo di Lagrange. Si disegnino in figura 1 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
• Si determini la reazione del vincolo in C
• Si calcoli lo sforzo normale nell’asta BC utilizzando il metodo delle sezioni di Ritter. Si tracci in figura 1 la
sezione a tal fine utilizzata, e si riporti nel riquadro sottostante l’equazione utilizzata nella soluzione
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si enuncino e si dimostrino le equazioni di Lagrange per sistemi olonomi
• Si enunci e si dimostri il principio di azione e reazione per corpi continui
A
F
B
C
Figura 1:
TEMA N.1 [8 punti]
Sia (e1 , e2 , e3 ) un riferimento ortonormale. È assegnato l’atto di moto:
v(x, t) = γ[(3x1 + γLt)e1 + (4x2 − 3x3 )e2 + (6x2 − 5x3 )e3 ]
con γ ed L parametri fissati, ed il campo scalare, in descrizione spaziale
Φ(x, t) = tx1 x2 .
• si determini il campo di accelerazione in descrizione spaziale e la derivata temporale sostanziale di Φ
• si determini il moto, assumendo che risulti B ≡ Bo
• assumendo che la configurazione di riferimento sia omogenea con densità ρ0 , si calcoli la densità ρ(x, t)
• è noto che lo stato tensionale è T = γρ0 exp(2γt)[(−3x3 x2 + x22 )e2 ⊗ e2 − 4x21 e1 ⊗ e1 ]: si determinino le forze
di volume
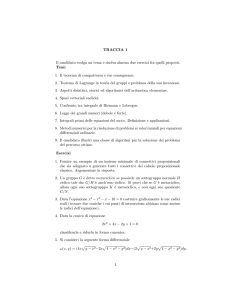
TEMA N.2 [8 punti]
È assegnata la trave reticolare riportata in figura 1. Si dimostri che essa risulta isostatica.
• Si calcoli lo sforzo normale nell’asta AB utilizzando il metodo di Lagrange. Si disegnino in figura 1 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
• Si calcoli lo sforzo normale nell’asta BC utilizzando il metodo di Lagrange. Si disegnino in figura 2 le catene cinematiche a tal fine necessarie e si riporti nel riquadro sottostante l’equazione utilizzata per la soluzione.
• Si calcolino gli sforzi normali nelle aste BE ed EC utilizzando il metodo delle sezioni di Ritter. Si tracci in figura 3 la sezione a tal fine utilizzata, e si riportino nel riquadro sottostante le equazioni utilizzate nella soluzione
TEMA N.3 [7 punti] (se lo spazio a disposizione per le dimostrazioni non fosse sufficiente, si utilizzi il dorso del
foglio adiacente)
• Si enuncino e si dimostrino le equazioni di Lagrange
• Si enunci e si dimostri il teorema degli spostamenti virtuali per corpi continui
Figura 1:
Figura 2:
Figura 3: