→5
I 5→
Corso di Laurea in Disegno Industriale
(funzione reale di una variabile reale)
Corso di “Metodi Numerici per il Design”
Funzioni primitive
Lezione 20 Novembre 2002
Primitive e loro applicazioni
F. Caliò
1
2
Primitive di una funzione data
Funzione primitiva
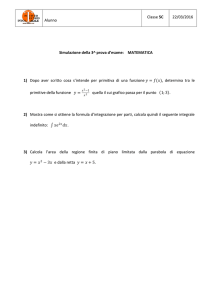
Data la funzione f(x) =
y
x2
x3
3
data inoltre F(x) =
y = f(x)
x
Risulta: F’(x) = f(x)
y = F(x)+k1
'LFLDPR FKH ) [ q XQD SULPLWLYD GL I [
“Primitiva di una data funzione f(x) è una funzione
F(x) la cui derivata è uguale alla funzione data”
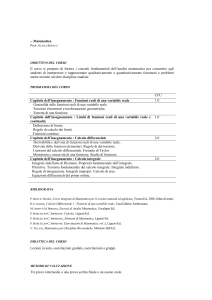
f(x) = sinx
F1(x) = - cosx
F2(x) = 1- cosx
F(x) è una
primitiva
y
y = F(x)
y = F(x)+k2
F(x)+k1 è una
primitiva
k1 >0
F(x)+k2 è una
primitiva
k2 <0
x
(VLVWRQR SL• SULPLWLYH GL
XQD GDWD IXQ]LRQH
2JQL SULPLWLYD GLIIHULVFH
GD XQ·DOWUD SULPLWLYD SHU
XQD FRVWDQWH
3
4
Definizione di integrale indefinito
Integrale indefinito di una funzione f(x) è
l’insieme delle primitive della funzione f(x)
/·LQWHJUDOH LQGHILQLWR VL LQGLFD FRQ LO VLPEROR
→5
I 5→
Integrale indefinito
∫ f ( x )dx
• La funzione f(x) si dice funzione integranda
• il simbolo
∫
si dice integrale
5
Metodi Numerici per il Design - Lezione 16/17 Ottobre 2002
6
1
Esempi di integrali indefiniti
Tabella degli integrali indefiniti fondamentali
f(x )
Indichiamo con C una generica costante reale.
∫ sinxdx = − cos x + C
xa
∫ xdx =
x2
+C
2
∫ dx =
x+C
sinx
cos x
1
x
ex
1
∫ x dx = lg x + C
∫
f ( x )dx
x a +1
+C
a +1
− cos x + C
sinx + C
lg x + C
ex +C
7
Proprietà dell’integrale indefinito
8
Proprietà dell’integrale indefinito - Esempi
∫ ( f ( x ) ± g( x ))dx = ∫ f ( x )dx ± ∫ g( x )dx
L’integrale della somma (differenza) di funzioni
integrande è la somma (differenza) degli integrali
∫ kf ( x )dx = k ∫ f ( x )dx
6RPPD
∫( x
2
3
− sinx )dx = ∫ x 2 dx − ∫ sinxdx = x + cos x + C
3
3URGRWWR SHU XQD FRVWDQWH
L’integrale del prodotto di una costante per una
funzione è il prodotto della costante per
l’integrale della funzione
2
1
1
∫ x dx = ∫ 2 x dx = 2 ∫ x dx = 2 ln x + C
9
10
Equazione differenziale
Un’equazione differenziale in f(x) è
un’eguaglianza in cui figurano una o più
derivate della funzione incognita f(x)
Problemi differenziali
(VHPSLR
(applicazioni del calcolo integrale)
2f 2(x) + f ’(x) - 5 = 0
Risolvere l’equazione differenziale significa
determinare la funzione f(x)
11
Metodi Numerici per il Design - Lezione 16/17 Ottobre 2002
12
2
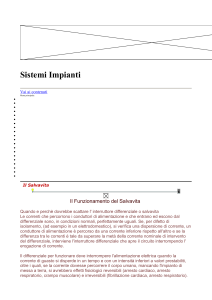
Esempio di problema differenziale
Esempio di problema differenziale (continuazione)
6WXGLDUH LO PRWR GL XQ FRUSR 3 ODQFLDWR LQ YHUWLFDOH
vz è una funzione del tempo t : vz (t)
CONDIZIONI
INIZIALI
t è la variabile indipendente
z
2a legge di Newton (massa×
×accelerazione = forza):
EQUAZIONE DIFFERENZIALE + CONDIZIONI
INIZIALI = PROBLEMA DIFFERENZIALE
Forza peso = -mg g accelerazione di gravità
accelerazione = derivata della velocità=vz’(t)
P sz
vz
t= 0
vz = v1
v’z (t) = -g
z
mv’z (t) = - m g
vz
P sz
vz(t) = ∫ ( −g)dt = -g∫ dt = -gt + C
Verso il basso, quindi negativa
'DOOH FRQGL]LRQL LQL]LDOL →
equazione differenziale
v1
t=0
vz velocità del corpo
t= 0
vz velocità del corpo
CONDIZIONI
INIZIALI
vz = v1
sz spostamento del corpo
v1 = C
vz(t) = v1-gt
sz spostamento del corpo
(continua)
(continua)
13
14
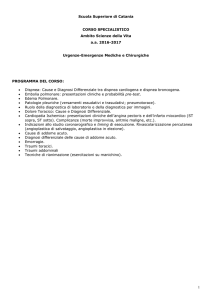
Esempio di problema differenziale (continuazione)
v’z (t) = -g
vz
v1
=
t= 0
vz = v1
vz
z
t
-g
v1
vz(t) = v1-gt
P sz
vz
v1
g
velocità =
derivata dello spostamento:
→ s’z (t) = v1 - gt
vz (t) =sz’(t)
t
Problemi differenziali
vettoriali
sz
equazione differenziale in sz
sz(t) = ∫ (v 1 − gt )dt = v 1t − 1 gt 2 +C
2
t= 0
sz = 0
P sale
v1 P scende
g
→ 0 = C sz(t) = v1t -½gt2
t
15
16
Esempio: problema differenziale vettoriale
Esempio: problema differenziale vettoriale
(continuazione)
&RUSR 3 ODQFLDWR REOLTXDPHQWH
v
s: vettore spostamento;
s è funzione del tempo t : s (t)
vx
v: vettore velocità;
velocità = derivata dello
spostamento: v (t) = s’ (t)
v (0)
s
vz
P
g
2a legge di Newton:
v1
x
v2
(48$=,21,
3$5$0(75,&+(
v’ (t) = g
z
mv’ (t) = mg
&21',=,21,
,1,=,$/,
t= 0
vx = v2
vz = v1
v (0)
Equazione differenziale vettoriale
v’x (t) = 0 Equazioni differenziali
v’z (t) = -g equivalenti
P
g: vettore accelerazione di gravità;
gx=0; gz=-g;
v’x (t) = 0
v’z (t) = -g
v
s
z
t= 0
vx = v2
vz = v1
g
Condizioni iniziali
v1
v2
x
vx(t) = ∫ 0 ⋅ dt = C = v2
vz(t) = v1-gt
RISULTATO RICAVATO IN
PRECEDENZA
(continua)
v (t) = iv2 + k(v1-gt)
17
Metodi Numerici per il Design - Lezione 16/17 Ottobre 2002
EQUAZIONI
PARAMETRICHE
EQUAZIONE
VETTORIALE
18
3
Esercizio: problema differenziale 1
Esercizio: problema differenziale 2
Data l’equazione differenziale f ' ( x ) = sinx
Data l’equazione differenziale
trovare la soluzione soddisfacente la seguente
1
x2
trovare la soluzione soddisfacente le seguenti
f(0 ) = 1
condizione iniziale:
f' ' ( x ) = −
f (1 ) = 1
f ' ( 1 ) = 1
condizioni:
∫ sinxdx = − cos x + C
− cos 0 + C = 1 C = 2
f' ( x ) = ∫ ( −
f ( x ) = − cos x + 2
f( x ) = ∫(
1
1
)dx = + C
x
x2
1
+ C ) = ln x + Cx + D
x
19
Esercizio: problema differenziale 2 (continuazione)
f (1 ) = 1
f ' ( 1 ) = 1
20
Esercizio: problema differenziale 3
Data l’equazione
f ( x ) = ln x + Cx + D
1
f' ( x ) = + C
x
differenziale vettoriale
ln 1 + C + D = 1
1+C =1
trovare la soluzione
D = 1
C = 0
soddisfacente la
condizione:
f ( x ) = ln x + 1
21
(continua)
e x
f' ( x ) =
x
1
f (0 ) =
0
e x dx
=
f ( x ) ∫
∫ xdx
(continua)
22
Esercizio: problema differenziale 3 (continuazione)
e x dx
f ( x ) = ∫
∫ xdx
1
f (0 ) =
0
e x dx = e x + C
∫
x2
+D
∫ xdx =
2
e 0 + C = 1
D =0
FINE
e x
f( x ) = 2
x
23
Metodi Numerici per il Design - Lezione 16/17 Ottobre 2002
24
4