Anno accademico 1990-1991
Gli esercizi sono presentati in ordine di difficoltà crescente.
1) Un generatore di tensione a 100 𝑣𝑜𝑙𝑡 fornisce potenza ad un carico di
utilizzazione attraverso una linea di trasmissione di resistenza 1 𝑜ℎ𝑚. Qual è la
potenza dissipata nella linea se viene erogato 1 𝑘𝑖𝑙𝑜𝑤𝑎𝑡𝑡? Quale sarebbe la
potenza dissipata se il generatore funzionasse a 10 𝑘𝑖𝑙𝑜𝑣𝑜𝑙𝑡? Si commenti il
risultato trovato.
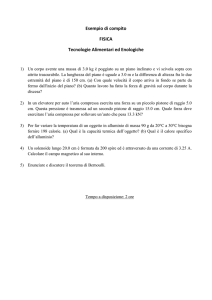
La rete assegnata si può schematizzare come mostrato nella figura che segue, in
cui è stato riportato il valore numerico dell’unico parametro che non cambierà nel
corso dello svolgimento.
Senza utilizzare in un primo momento alcun valore numerico, si può dire che la
corrente che fluisce nel circuito vale
𝐼=
𝐸
,
𝑅 + 𝑅𝐿
2
da cui è possibile ricavare le potenze assorbite dal carico e dalla linea di
trasmissione
𝑅𝐸 2
𝑅𝐿 𝐸 2
2
𝑃 = 𝑅𝐼 =
, 𝑃𝐿 = 𝑅𝐿 𝐼 =
.
(𝑅 + 𝑅𝐿 )2
(𝑅 + 𝑅𝐿 )2
2
Si scopre facilmente che le due potenze appena determinate sono proporzionali,
sicché si può scrivere
𝑅
𝑃.
𝑅𝐿
𝑃𝐿 =
Il testo chiede la potenza dissipata nella linea, se viene erogato una potenza nota
di potenza al carico, per cui bisogna determinare il valore della resistenza di
carico, che si può dedurre da un’equazione di secondo grado
𝑅𝐸 2
𝐸2
2
𝑃=
→ 𝑅 + (2𝑅𝐿 − ) 𝑅 + 𝑅𝐿2 = 0 .
2
(𝑅 + 𝑅𝐿 )
𝑃
Introdotta poi quale variabile adimensionale il rapporto tra le resistenze
𝑢=
𝑅
,
𝑅𝐿
la precedente equazione di secondo grado diventa
𝐸2
𝑢 + (2 −
)𝑢 +1 = 0 ,
𝑃𝑅𝐿
2
il cui discriminante vale
3
2
𝐸2
𝐸2 𝐸2
∆= (2 −
− 4) .
) −4=
(
𝑃𝑅𝐿
𝑃𝑅𝐿 𝑃𝑅𝐿
Bisogna adesso separatamente discutere le due situazioni proposte.
𝑎) Se si assume
𝐸 = 100 𝑉 , 𝑅𝐿 = 1 Ω , 𝑃 = 1 𝑘𝑊 ,
si può scrivere che
𝐸2 𝐸2
∆=
− 4) = 10(10 − 4) = 60 > 0
(
𝑃𝑅𝐿 𝑃𝑅𝐿
e si avranno due radici reali e distinte dell’equazione di secondo grado
𝑢2 − 8𝑢 + 1 = 0 ,
che sono pari a
𝑢1 =
8 − √60
8 + √60
1
< 𝑢2 =
=
.
2
2
𝑢1
Entrambe queste radici sono positive e consentono di ricavare la potenza lungo
la linea di trasmissione
𝑃𝐿 =
𝑅
𝑃 = 𝑢𝑃 = (4 ± √15 ) 𝑘𝑊 ,
𝑅𝐿
4
sicché le due potenze risultano pari a
𝑃𝐿,1 ≅ 0.13 𝑘𝑊 < 𝑃𝐿,2 ≅ 7.87 𝑘𝑊 .
La prima radice, in effetti, impegna, per una assegnata potenza assorbita dal
carico, una potenza minore sulla linea e, pertanto, è da preferire alla seconda.
𝑏) Se si assume
𝐸 = 10 𝑘𝑉 , 𝑅𝐿 = 1 Ω , 𝑃 = 1 𝑘𝑊 ,
si può scrivere che
𝐸2 𝐸2
∆=
− 4) = 105 (105 − 4) > 0
(
𝑃𝑅𝐿 𝑃𝑅𝐿
ed anche in questo secondo caso si avranno due radici reali e distinte
dell’equazione di secondo grado
𝑢2 + (2 − 105 )𝑢 + 1 = 0 ,
che sono pari a
𝑢1,2
105 − 2 ± √105 (105 − 4)
=
.
2
Entrambe queste radici sono positive e consentono di ricavare in maniera formale
la potenza lungo la linea di trasmissione
5
𝑃𝐿 =
𝑅
105 − 2 ± √105 (105 − 4)
𝑃 = 𝑢𝑃 =
𝑘𝑊 .
𝑅𝐿
2
Tuttavia, una delle radici è molto piccola dell’altra
𝑢1 ≅ 10−5 ≪ 𝑢2 ≅ 105 ,
sicché le due potenze seguono la stessa disuguaglianza
𝑃𝐿,1 ≅ 0.01 𝑊 ≪ 𝑃𝐿,2 ≅ 100 𝑀𝑊 .
La potenza più piccola, per le ragioni messe in evidenza in precedenza, è da
preferire. Inoltre, aumentando la differenza di potenziale erogata dal generatore,
la dissipazione di potenza è relativamente basso: per questi motivi, nelle linee
elettriche si preferisce utilizzare potenziale relativamente elevato.
6
2) Una ruota di automobile con un battistrada spesso pochi centimetri può
percorrere distanze anche dell’ordine di cinquantamila chilometri prima di
usurarsi completamente. Si stimi l’ordine di grandezza dello spessore di
battistrada consumato per giro e si ponga in relazione questo numero con una
plausibile descrizione del meccanismo microscopico di usura del battistrada.
Si consideri la ruota di un’auto e si supponga che sia di diametro 𝐷 = 50 𝑐𝑚. Lo
spessore 𝑠del battistrada, che giro dopo giro va diminuendo, è di pochi centimetri
e quindi si può porre 𝑠 = 5 𝑐𝑚. Esso risulta trascurabile rispetto al raggio della
ruota
𝑠≪𝐷.
È l’aria che riempie lo pneumatico a sostenere il peso dell’auto e non la gomma in
sé. Di questo particolare ci si accorge solo quando si buca: senza aria, la gomma è
inutilizzabile. A meno che si usino le gomme run flat: sono rinforzate nelle
strutture laterali in modo che siano capaci di sopportare il peso della vettura e dei
suoi occupanti. Questo utile espediente, però, non dura a lungo: si può proseguire
solo per 80 𝑘𝑚, una distanza che dipende dal costruttore, e mentre si guida non
bisogna superare la velocità di 80 𝑘𝑚/ℎ.
Il numero di giri che la ruota compie prima di aver usurato completamente il
battistrada è pari a
𝑛=
𝑑
,
𝜋𝐷
cioè è pari al rapporto tra la distanza percorsa dalla macchina
𝑑 = 50 ∙ 106 𝑚
7
e la circonferenza della ruota. Pertanto, lo spessore di battistrada consumato ∆𝑠
per ogni giro risulta
∆𝑠 =
𝑠
𝜋𝐷
=𝑠
,
𝑛
𝑑
cioè pari al rapporto fra lo spessore iniziale del battistrada ed il numero di giri.
Sostituendo i valori numerici, si ottiene
∆𝑠 = 𝑠
𝜋𝐷
0.5𝜋
= 5 ∙ 10−2
𝑚 ≅ 1.57 ∙ 10−9 𝑚 = 1.57 𝑛𝑚 ,
6
𝑑
50 ∙ 10
che è una grandezza dell’ordine atomico. Da ciò segue che una possibile motivare
la spiegazione del meccanismo di usura del battistrada: dato che il battistrada è
schiacciato contro il terreno, tende leggermente ad estendersi per elasticità a ogni
contatto, per poi ritornare alla dimensione originaria; questo allargarsi del
battistrada a contatto col terreno provoca un micro strisciamento in ogni
direzione, che è responsabile dell'usura. E così, giro dopo giro, viene sottratta al
battistrada una ‘manciata’ di atomi, che ne determina l’usura.
8
3) Si vuole convertire un fascio di luce laser del diametro di 1 𝑚𝑚 in un altro
avente diametro di 1 𝑐𝑚, utilizzando solo lenti convergenti con distanza focale di
20 𝑐𝑚. Qual è il numero minimo di lenti che occorre utilizzare (disponendole tutte
ortogonalmente al fascio), e a quali distanze tra loro devono essere disposte?
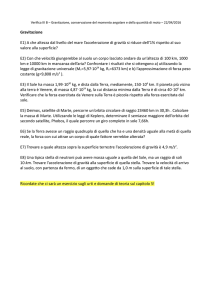
Non potendo ipotizzare l’uso di specchi e di schermi, la più semplice soluzione,
costituita da tre lenti convergenti identiche, è mostrata nella figura che segue,
peraltro non in scala.
Nell figura indicato la semi-apertura del fascio ed il fuoco delle lenti vengono,
rispettivamente, indicate con i simboli
𝑤 = 0.5 𝑐𝑚 , 𝑓 = 20 𝑐𝑚 ,
La prima lente serve ad allargare il fascio, la seconda è posta ad una distanza
superiore al fuoco, la terza ricostruisce un’immagine che parte proprio dal suo
fuoco. Dalla similitudine dei due triangoli blu, si può, con evidente significato dei
simboli adoperati, scrivere che
9
𝛼𝑤 𝑤
=
→ 𝑎 = 𝛼𝑓 ,
𝑎
𝑓
mentre la similitudine dei triangoli verdi implica che
10𝑤 𝛼𝑤
𝛼𝑓
=
→ 𝑏=
.
𝑓
𝑏
10
Dividendo membro a membro le due relazioni trovate, si conclude che
𝑎 = 10𝑏 .
Applicando, inoltre, l’equazione dei fabbricanti di lenti alla seconda lente, si ricava
1 1 1
1
1 1
11
+ =
→
+ =
→ 𝑏=
𝑓 = 22 𝑐𝑚 .
𝑎 𝑏 𝑓
10𝑏 𝑏 𝑓
10
Discende allora che
𝑎 = 10𝑏 = 220 𝑐𝑚 ,
per cui si conclude che le distanze tra gli specchi valgono
𝑑12 = 𝑓 + 𝑎 = 240 𝑐𝑚 , 𝑑23 = 42 𝑐𝑚 .
10
4) Un cilindro verticale di altezza 𝐿 è chiuso in basso da una parete fissa e in alto
da un pistone di massa 𝑀 libero di muoversi sotto l’azione dell’accelerazione di
gravità 𝑔. All’interno del cilindro, una pallina di massa 𝑚 ≪ 𝑀 rimbalza
verticalmente tra base e pistone. Si supponga che i rimbalzi siano perfettamente
elastici e che la velocità della pallina 𝑢 sia molto maggiore della velocità di caduta
libera 𝑢0 = √2𝑔𝐿 così che si possa considerare il modulo di 𝑢 costante.
(𝑖) Considerando la pallina puntiforme, si stimi per quale valore della velocità 𝑢
gli urti sul pistone possano in media controbilanciare l’effetto della gravità così
che il pistone possa rimanere sospeso. Si tracci una analogia tra la condizione
ottenuta e l’equazione dei gas perfetti.
(𝑖𝑖) Si ripeta il calcolo precedente tenendo conto del raggio 𝑟 della pallina e si
confronti il risultato ottenuto con l’equazione per i gas reali, nota come equazione
di van der Waals.
Per indagare la struttura interna della materia, è utile disporre di qualcosa di
analogo a quello che il punto materiale rappresenta per la dinamica. In quel caso
era necessario introdurre un oggetto semplificato, idealmente privo di
dimensioni, capace solo di traslare. Il suo scopo era concentrare l’attenzione sugli
effetti di traslazione prodotti dall’azione di una forza su di una massa, lasciando
fuori altri fenomeni come la rotazione e le differenti forme di attrito. Allo stesso
modo si utilizza un modello semplificato di sostanza che consenta di concentrare
l’attenzione solo sull’effetto che lo scambio del calore produce sulla temperatura
dei corpi. Le sostanze in fase aeriforme sembrano le più difficili da gestire, in
quanto non possiedono né un proprio volume né un propria forma. Tuttavia, come
si è visto, quando la loro densità è molto bassa esse tendono ad uniformare il loro
comportamento manifestando una decrescita lineare del volume al diminuire
della temperatura e della pressione. Questa è una regolarità unica, mostrata in
Natura solo dai gas molto rarefatti, e che suggerisce di utilizzarli come punto di
partenza. Si considerano quindi tanto più ideale o perfetto un gas, quanto più esso
11
segue esattamente quella legge di decrescita lineare della pressione con la
temperatura analizzata per introdurre lo zero assoluto. Si intende quindi con il
termine gas perfetto non una particolare sostanza, ma una condizione.
Sperimentalmente si osserva che a tale condizione i gas reali si approssimano
tanto meglio quanto più essi sono rarefatti e quanto più alta è la loro temperatura.
Le particelle che costituiscono la materia allo stato gassoso possiedono dunque
un’energia cinetica che prevale sulle forze di reciproca attrazione. I gas non hanno
perciò né forma né volume propri. Le particelle tendono a occupare tutto lo spazio
disponibile, ad esempio, quello di un recipiente chiuso, urtandosi continuamente
tra di loro e contro le pareti del recipiente che le contiene: questi urti contro le
pareti determinano la pressione esercitata dal gas. Tutti i gas, indipendentemente
dalla loro natura chimica, possiedono proprietà fisiche simili; in particolare il loro
comportamento in relazione a variazioni di pressione, volume e temperatura è
descrivibile da leggi valide per tutte le sostanze allo stato gassoso.
Le leggi che stabiliscono le relazioni tra le variabili dei gas, pressione, volume e
temperatura si riferiscono a un gas ideale, o perfetto, ossia a un modello di gas che
deve rispondere ai seguenti quattro requisiti: le sue particelle sono in continuo
movimento secondo traiettorie rettilinee regolate dalle leggi del caso; le sue
12
particelle hanno un volume proprio (covolume) trascurabile rispetto al volume a
disposizione del gas stesso; tra le particelle non esistono interazioni; gli urti delle
particelle sono elastici, ossia non comportano perdita di energia.
(𝑖) La forza che agisce sul pistone a causa della pallina è dovuta agli urti tra
quest’ultima e la superficie interna del pistone e vale formalmente
𝐹=
∆𝑝
.
∆𝑡
In questa equazione, la grandezza ∆𝑝 rappresenta la variazione della quantità di
moto che la particella subisce da quando lascia il pistone −𝑚𝑢 a quando ritorna
ad impattare su esso 𝑚𝑢, vale a scrivere
∆𝑝 = 𝑚𝑢 − (−𝑚𝑢) = 2𝑚𝑢 ,
mentre ∆𝑡 è l’intervallo di tempo che intercorre tra due urti successivi, per cui
∆𝑡 =
2𝐿
.
𝑢
Operando il rapporto tra le ultime due grandezze calcolate, si ottiene il valore
della forza esercitata dalla particella sul pistone
∆𝑝 𝑚𝑢2
𝐹=
=
.
∆𝑡
𝐿
Affinché essa possa controbilanciare in media l’effetto della gravità ed il pistone
possa rimanere sospeso, occorre imporre l’uguaglianza
13
𝑚𝑢2
𝐹 = 𝑀𝑔 → 𝑀𝑔 =
,
𝐿
da cui discende immediatamente il valore richiesto della velocità
𝑀𝑔𝐿
𝑢=√
.
𝑚
Inoltre, la forza che agisce sulla sezione 𝑆 pistone, cioè la pressione esercitata
dalla particella, vale
𝑝=
𝐹 𝑀𝑔
=
.
𝑆
𝑆
Pertanto, si ricava che la pressione esercitata dalla particella non dipende dalla
massa della particella che rimbalza.
Al fine di tracciare un’analogia con i gas perfetti, si pongano 𝑛 moli di gas nello
stesso volume cilindrico 𝑉 = 𝑆𝐿, alla pressione 𝑝. Detta 𝑇 la temperatura assoluta,
l’equazione di stato consente di scrivere che
𝑝𝑉 = 𝑛𝑅𝑇 ,
in cui la costante universale vale
𝑅 = 8.314472
𝐽
.
𝑚𝑜𝑙 𝐾
Ebbene, si otterrà la stessa pressione prodotta dalla particella che rimbalza, se
risulta che tra le diverse quantità sussiste l’uguaglianza
14
𝑛𝑅𝑇 = 𝑀𝑔𝐿 .
Supponendo noto il secondo membro, questa relazione consente di scegliere tra
diverse possibili configurazioni di gas che variano per il numero di moli e la
temperatura, sempre che il loro prodotto si mantenga costante.
(𝑖𝑖) Se la particella non è più puntiforme, ma possiede un volume proprio, allora,
seguendo la linea tracciata nel punto precedente, si può scrivere che il tempo tra
due urti vale
∆𝑡 =
2(𝐿 − 2𝑟)
,
𝑢
che generalizza il tempo calcolato in precedenza. Similmente, la forza è pari a
∆𝑝
𝑚𝑢2
𝐹=
=
.
∆𝑡 𝐿 − 2𝑟
Affinché essa possa controbilanciare in media l’effetto della gravità ed il pistone
possa rimanere sospeso, occorre imporre l’uguaglianza
𝑚𝑢2
𝐹 = 𝑀𝑔 → 𝑀𝑔 =
,
𝐿 − 2𝑟
da cui discende immediatamente il valore richiesto della velocità
𝑀𝑔(𝐿 − 2𝑟)
𝑢=√
.
𝑚
15
Inoltre, la forza che agisce sulla sezione 𝑆 pistone, cioè la pressione esercitata
dalla particella, vale
𝐹
𝑚𝑢2
𝑀𝑔
𝑝= =
=
,
𝑆 𝑆(𝐿 − 2𝑟)
𝑆
vale a dire lo stesso risultato ottenuto nel caso in cui il raggio della particella tende
a diventare nullo.
I gas reali, in condizioni di pressione e temperatura vicine a quelle ambientali, si
comportano con buona approssimazione come i gas ideali, mentre alle alte
pressioni e alle basse temperature manifestano deviazioni più o meno marcate
rispetto alle leggi dei gas ideali, in quanto diventano non più trascurabili il volume
proprio delle molecole, rispetto al volume del gas stesso, e la reciproca attrazione
tra le molecole. La legge di van der Waals è una legge fisica che descrive il
comportamento dei gas reali e rappresenta un’estensione della legge dei gas
perfetti, rispetto alla quale consente una migliore descrizione dello stato gassoso
per le alte pressioni ed in prossimità del punto di liquefazione. Essa prende il
nome dall’omonimo fisico olandese, che la propose in un lavoro del 1873 e per la
sua formulazione fu insignito del Premio Nobel per la Fisica nel 1910. La
formulazione della legge è
𝑛𝑅𝑇
𝑛2
𝑝=
−𝑎 2,
𝑉 − 𝑛𝑏
𝑉
in cui il primo addendo tiene in conto del volume 𝑛𝑏 occupato dalle 𝑛 moli di gas
e quindi non più disponibile, non essendo le molecole puntiformi, mentre il
secondo addendo 𝑎𝑛2 /𝑉 2 viene detto pressione di coesione e schematizza le forze
elettriche che si esercitano tra le diverse molecole, considerate come dipoli. I due
parametri 𝑎 e 𝑏 sono caratteristici di ciascun gas ed in quel che segue verranno
considerati noti. Ad esempio, per l’azoto essi valgono
16
𝐽𝑚3
𝑚3
−5
𝑎 = 0.1362
, 𝑏 = 3.85 ∙ 10
.
𝑚𝑜𝑙
𝑚𝑜𝑙
Johannes Diderik van der Waals
Leida, 23 novembre 1837 – Amsterdam, 8 marzo 1923)
Per ottenere la stessa pressione che sorregga il pistone, occorre che
𝑛𝑅𝑇
𝑛2 𝑀𝑔 𝑀𝑔𝐿
−𝑎 2 =
=
,
𝑉 − 𝑛𝑏
𝑉
𝑆
𝑉
da cui discende la nuova relazione
𝑛𝑅𝑇𝑉
𝑛2
−𝑎
= 𝑀𝑔𝐿 ,
𝑉 − 𝑛𝑏
𝑉
che generalizza la relazione trovata nella discussione del punto precedente.
17
5) Si considerino due corpi sferici (solidi) di massa 𝑚 e raggio 𝑟, orbitanti attorno
ad un pianeta di massa 𝑀 su uno stesso piano, nello stesso verso e su orbite
circolari di raggio 𝑅 + 𝑟 e 𝑅 − 𝑟 rispettivamente, con 𝑟 ≪ 𝑅.
Supponiamo inizialmente che essi siano abbastanza distanti tra loro in modo da
poter trascurare la mutua attrazione gravitazionale.
(𝑎) Si calcoli di quanto differiscono le loro velocità angolari dalla velocità angolare
𝜔0 che avrebbero se si muovessero sull’orbita di raggio 𝑅.
(𝑏) Quale forza oltre a quella del pianeta occorre esercitare su ciascuno dei due
corpi affinché essi possano ruotare sulle orbite di raggi 𝑅 + 𝑟 e 𝑅 − 𝑟 ma con
velocità angolare 𝜔0 ?
Consideriamo ora la situazione in cui i due corpi, per effetto della loro mutua
interazione gravitazionale, ruotano ancora su orbite di raggio 𝑅 + 𝑟 e 𝑅 − 𝑟 ma a
contatto tra di loro.
(𝑐) Tenuto conto del risultato del punto (𝑏) precedente, si determini in funzione
di 𝑚, 𝑀, 𝑟, 𝑅, la disuguaglianza che rende questa situazione possibile.
(𝑑) Supponendo uguali le densità dei due corpi e del pianeta, si riduca la relazione
ricavata in (𝑐) ad una disuguaglianza fra 𝑅 e il raggio 𝑅0 del pianeta.
(𝑒) Che cosa si può concludere in merito alla formazione di satelliti o di anelli
attorno ad un pianeta?
In tutto il problema si approssimi
𝑟 𝑎
𝑟
(1 ± ) con 1 ± 𝑎 .
𝑅
𝑅
18
Si osserva preliminarmente che lo sviluppo, proposto dal testo per approssimare
le relazioni trovate, rappresenta i primi due termini della cosiddetta serie
binomiale
∞
𝑎
(1 + 𝑥)𝑎 = ∑ ( ) 𝑥 𝑘 per |𝑥| < 1
𝑘
𝑘=0
e valido per ogni valore, anche complesso, del parametro 𝑎. Si tratta di uno
sviluppo che Newton utilizzò spesso e che dedusse dal teorema binomiale, che
serve per sviluppare una potenza qualsiasi di un binomio. Il fattore
𝑘−1
1
𝑎
( ) = ∏(𝑎 − 𝑝)
𝑘
𝑘!
𝑝=0
rappresenta una generalizzazione dell’ordinario coefficiente binomiale.
Venendo al problema proposto, si può dire che si tratta di un intelligente
problema, una cui accurata soluzione può portare alla spiegazione della
formazione degli anelli di Saturno.
(𝑎) Supponendo che i due corpi sferici di massa 𝑚 non interagiscano e siano
entrambi sulla medesima orbita circolare di raggio 𝑅, si può scrivere che la forza
di attrazione gravitazionale costituisce la forza centripeta che mantiene in orbita
i due corpi, per cui
𝑚𝜔02 𝑅 = 𝐺
𝑚𝑀
𝑀
𝐺𝑀
2
√
→
𝜔
𝑅
=
𝐺
→
𝜔
=
.
0
0
𝑅2
𝑅2
𝑅3
Similmente, per l’orbita più piccola la velocità angolare risulta pari a
19
𝐺𝑀
𝑅3
√
√
𝜔1 =
= 𝜔0
,
(𝑅 − 𝑟)3
(𝑅 − 𝑟)3
mentre per quella più grande si ha
𝐺𝑀
𝑅3
√
𝜔2 = √
= 𝜔0
.
(𝑅 + 𝑟)3
(𝑅 + 𝑟)3
Vale la pena osservare che valgono le disuguaglianze
𝜔1 > 𝜔0 > 𝜔2 ,
per cui la massa che percorre l’orbita più lontano si muove più lentamente. Allora,
si può scrivere
20
∆𝜔1 𝜔1 − 𝜔0
𝑅3
∆𝜔2 𝜔0 − 𝜔2
𝑅3
√
√
=
=
−1,
=
=1−
.
(𝑅 − 𝑟)3
(𝑅 + 𝑟)3
𝜔0
𝜔0
𝜔0
𝜔0
Inoltre, adoperando gli sviluppi binomiali
3
𝑅3
𝑟 −3/2
3𝑟
𝑅3
𝑟 −2
3𝑟
√
√
=
−
≅
1
+
,
=
+
≅
1
−
(1
)
(1
)
(𝑅 − 𝑟)3
(𝑅 + 𝑟)3
𝑅
2𝑅
𝑅
2𝑅
si ottiene che le due variazioni risultano approssimativamente uguali
𝜔1 − 𝜔0 ≅ 𝜔0 − 𝜔2 ≅
3𝑟
𝜔 .
2𝑅 0
(𝑏) Affinché la massa che orbita sull’orbita più piccola abbia velocità angolare 𝜔0 ,
si deve verificare che
𝑚𝜔02 (𝑅 − 𝑟) = 𝐺
𝑀𝑚
+ 𝐹1 → 𝐹1 = 𝑚(𝑅 − 𝑟)(𝜔02 − 𝜔12 ) ,
2
(𝑅 − 𝑟)
cioè si deve applicare una forza centrifuga 𝐹1 < 0, per rallentare la massa più
vicina al pianeta. Sviluppando i conti, si ottiene
𝐹1 =
𝑚𝜔02 (𝑅
𝑅3
3𝑅𝑟 2 − 3𝑅2 𝑟 − 𝑟 3
2
− 𝑟) [1 −
,
] = 𝑚𝜔0
(𝑅 − 𝑟)3
(𝑅 − 𝑟)2
che, trascurando le potenze di 𝑟 superiori alla prima, diventa
𝐹1 ≅ −3𝑟𝜔02 = −3𝐺
21
𝑚𝑀𝑟
.
𝑅3
Procedendo analogamente per l’orbita più distante, si ottiene
𝐹2 ≅ 3𝑟𝜔02 = 3𝐺
𝑚𝑀𝑟
,
𝑅3
vale a dire una forza centripeta che, sommandosi alla gravità, acceleri il corpo più
lontano dal pianeta. Si scopre allora che, come per le due variazioni di velocità
angolare, così anche queste due forze, in modulo, sono le stesse
𝐹2 ≅ |𝐹1 | ≅ 3𝐺
𝑚𝑀𝑟
.
𝑅3
(𝑐) Dato che i due corpi sono a contatto, il punto di giunzione deve muoversi a
velocità angolare 𝜔0 sull’orbita di raggio 𝑅. Pertanto, si può affermare che anche i
centri di massa dei due corpi viaggiano alla medesima velocità angolare 𝜔0 .
Tra essi agisce un’attrazione gravitazionale che, per essere in grado di tenerli a
contatto, deve essere in modulo più grande della forza determinata nel punto
precedente, per cui
22
𝑚2
𝑚𝑀𝑟
𝑟 3
𝑚
𝐺 2 > 3𝐺 3
→ ( ) <
.
4𝑟
𝑅
𝑅
12𝑀
(𝑑) Detta 𝜌 la comune densità, si può scrivere
4
4
𝑀 = 𝜋𝑅03 𝜌 , 𝑚 = 𝜋𝑟 3 𝜌 .
3
3
Sostituendo nell’ultima relazione trovata, risulta che
𝑟 3
𝑟3
3
→ 𝑅3 > 12𝑅03 → 𝑅 > √12 𝑅0 .
( ) <
3
𝑅
12𝑅0
Questo significa che la distanza a cui si possono formare satelliti o anelli intorno
ad un certo corpo celeste è determinata dalle dimensioni e dalla massa del pianeta
e delle particelle o degli oggetti che orbitano intorno ad esso. Se però questi hanno
origine comune a quella del pianete, cioè presentano una composizione molto
simile, una densità praticamente identica, allora questa distanza ideale dipende
solo dalle dimensioni del corpo celeste maggiore.
(𝑒) Da quanto stabilito in precedenza, si può dedurre che corpi a contatto
viaggianti sulla medesima orbita ed aventi densità uguale a quella del piante,
come accade in molti casi per gli anelli planetari, possono orbitare soltanto ad una
3
distanza più grande di √12 𝑅0 ≅ 2.3 𝑅0 , essendo 𝑅0 il raggio del pianeta. Così, ad
esempio, gli anelli di Saturno sono anelli planetari attorno al pianeta Saturno, che
ha un raggio pari a 𝑅0 = 58232 𝑘𝑚. Sono composti da milioni di piccoli oggetti,
della grandezza che varia dal micrometro al metro, orbitanti attorno al pianeta sul
suo piano equatoriale, e organizzati in un anello piatto. Poiché, come per la Terra,
l’asse di rotazione di Saturno è inclinato rispetto al piano orbitale, anche gli anelli
23
risultano inclinati. Gli anelli iniziano ad un’altezza di circa 60000 𝑘𝑚 dal centro di
Saturno e si estendono fino a 180000 𝑘𝑚.
A seguito dell’esplorazione ravvicinata della sonda spaziale Cassini-Huygens, il
loro spessore è stato misurato mediamente in circa 10 𝑚 e sono quindi
estremamente sottili. In compenso, gli anelli non sono completamente piatti, in
alcune zone le particelle sono addensate in strutture che si estendono da 3 𝑘𝑚 a
5 𝑘𝑚 sopra e sotto il piano degli anelli, proiettando così lunghe ombre in
particolari momenti di inclinazione rispetto al Sole.
Scrisse Galileo Galilei nel 1610, quando comunicò per lettera a Giovanni Keplero
la prima osservazione degli anelli di Saturno, che erano stati scambiati per due
astri più piccoli, Altissimus planetam tergeminum observavi, che vuol dire ho
‘osservato che il pianeta più alto è triplice’.
24
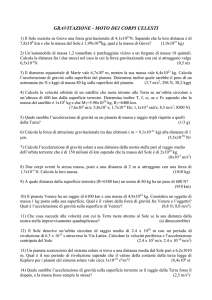
6) Si consideri il moto di un grave lasciato cadere verticalmente da un’altezza di
100 𝑚. Il grafico I riporta i valori dell’altezza del grave in funzione del tempo; il
grafico II riporta la velocità (verticale) in funzione del tempo. In ciascun grafico
sono disegnate due curve: una curva rappresenta il moto “reale” del grave, l’altra
è la previsione teorica basata su un modello semplice di caduta libera sotto
l’azione della sola accelerazione di gravità (costante).
(𝑖) Si associ a ciascuna delle due curve del grafico I la corrispondente curva del
grafico II e si identifichi quale di esse rappresenta il modello teorico semplice e
quale il caso reale.
(𝑖𝑖) Si considerino varie possibilità per l’origine della discrepanza tra caso reale e
modello teorico:
− variazione della gravità con l’altezza;
− presenza dell’aria;
− rotazione terrestre.
Si dica quale di queste può rendere ragione della discrepanza osservata e perché.
(𝑖𝑖𝑖) Si completi la risposta alla domanda (𝑖𝑖) deducendo dai grafici informazioni
quantitative sulla causa della discrepanza individuata (variazione percentuale
della gravità, oppure viscosità dell’aria, oppure velocità di rotazione terrestre). Si
suggerisce di procedere considerando l’andamento delle due curve nei due
intervalli di tempo: 𝑡 < 1𝑠, ove la curva reale si stacca poco dal modello teorico, e
𝑡 > 4 𝑠, ove le due curve sono molto diverse tra loro.
Le figura fornite nel testo sono di seguito riportate.
25
Si comincia a fornire le relazioni che collegano spazio, velocità e tempo per il caso
ideale, per cui risulta
ℎ(𝑡) = 100 − 4.9𝑡 2 , 𝑣(𝑡) = −9.8𝑡 .
La prima di esse descrive la parabola 𝐴, mentre la seconda rappresenta la retta 𝐶.
(𝑖) Da quanto affermato, discende che le curve dei due grafici sono associate come
segue
𝐴↔𝐶,
modello teorico ,
𝐵↔𝐷,
caso reale .
(𝑖𝑖) Per comprendere quale sia la ragione della discrepanza tra il modello teorico
e quello reale, si esaminano rapidamente le diverse possibilità elencate.
𝛼) Il valore dell’accelerazione di gravità non dipende dalla massa del corpo
considerato, sicché ogni corpo è soggetto alla stessa accelerazione, come scoperto
da Galileo Galilei, almeno fino a quando la resistenza dell’aria risulta trascurabile.
Tuttavia, non è lecito ritenere costante questa accelerazione se l’altezza varia,
26
come ad esempio nel caso del volo di un missile spaziale. In generale, 𝑔 diminuisce
con l’altezza, come è facile provare adoperando la Legge della Gravitazione
Universale.
Detto 𝑅𝑒 il raggio della Terra e seguendo la figura precedente, si può scrivere che
l’accelerazione di gravità dipende dalla quota ℎ secondo la legge
𝑔(ℎ) =
𝐺𝑀𝑇
𝐺𝑀𝑇
1
𝑔
= 2
=
,
2
2
(ℎ + 𝑅𝑒 )
(1 + ℎ/𝑅𝑒 )2
𝑅𝑒 (1 + ℎ/𝑅𝑒 )
in cui 𝑀𝑇 rappresenta la massa del pianeta. Nel caso in esame, dato che ℎ ≪ 𝑅𝑒 , la
variazione dell’accelerazione di gravità risulta
∆𝑔
1
1
=1−
=
1
−
≅ 0.003% ,
(1 + ℎ/𝑅𝑒 )2
(1 + 0.1/6371)2
𝑔
troppo piccola per giustificare la discrepanza tra i due modelli.
27
𝛽) La rotazione della Terra produce una forza centrifuga che si oppone
all’attrazione gravitazionale e questo effetto da solo fa sì che l’accelerazione di
gravità sia massima ai poli e minima all’equatore. Il valore convenzionale di 𝑔 è
pari a 9.80665 𝑚/𝑠 2 coincide proprio con la media di questi due valori estremi. Si
conclude che nemmeno questa causa può spiegare la discrepanza.
𝛾) Non resta che prendere in esame la resistenza offerta dall’aria al moto del
corpo. Come già ricordato, in assenza dell’aria, tutti i corpi sono soggetti alla
stessa accelerazione in un dato luogo. Questo moto è particolarmente semplice e
quindi ampiamente utilizzato negli esempi ed esercizi; resta il problema di sapere
quando è lecito trascurare la resistenza dell’aria e quanto buone sono certe
approssimazioni. Un corpo di velocità 𝑣⃗ immersa in un fluido è soggetto ad una
forza 𝐹⃗ di resistenza del mezzo che, per oggetti macroscopici e velocità
abbastanza grandi, si può scrivere
𝐹⃗ = −𝑘𝑣⃗ ,
dove la costante di proporzionale 𝑘 dipende dalla forma del corpo e dal fluido in
cui si muove. L’analisi dimensionale consente di scrivere che
[𝐹] 𝑘𝑔 𝑚/𝑠 2 𝑘𝑔
[𝑘] =
=
=
.
[𝑣]
𝑚/𝑠
𝑠
Questa forza si oppone al moto, nel senso che ha la stessa direzione della velocità
e verso opposto, per cui il bilancio di forze sul corpo consente di scrivere che
𝑚𝑎 = −𝑚𝑔 + 𝐹 →
28
𝑑𝑣
𝑘
= −𝑔 − 𝑣 .
𝑑𝑡
𝑚
Per capire se è lecito trascurare la resistenza dell’aria, bisogna risolvere questa
equazione, sicché, assumendo che il corpo parta da fermo 𝑣(0) = 0, risulta
𝑣
𝑑𝑣
𝑑𝑢
= −𝑔𝑑𝑡 → ∫
= −𝑔𝑡 .
𝑘
𝑘
0
1+
𝑣
1+
𝑢
𝑚𝑔
𝑚𝑔
Sviluppando l’integrale al primo membro, si può scrivere
𝑚𝑔
𝑘
𝑚𝑔
𝑘
ln (1 +
𝑣) = −𝑔𝑡 → 𝑣(𝑡) = −
[1 − exp (− 𝑡)] .
𝑘
𝑚𝑔
𝑘
𝑚
Se dunque si esamina il caso di un corpo in caduta libera sottoposto alla resistenza
viscosa di un fluido, ad esempio l’aria, dal Secondo Principio della Dinamica è
possibile esprimere la velocità di tale corpo come funzione del tempo
𝑣(𝑡) = −
𝑚𝑔
𝑘
[1 − exp (− 𝑡)]
𝑘
𝑚
29
e da questa espressione si può ricavare la velocità limite
𝑣𝐿 = lim 𝑣(𝑡) = −
𝑡→∞
𝑚𝑔
𝑘
𝑚𝑔
lim [1 − exp (− 𝑡)] = −
.
𝑘 𝑡→∞
𝑚
𝑘
Quanto più la resistenza dell’aria è piccola, tanto più la velocità limite è elevata in
valore assoluto. La funzione riportata in 𝐷 mostra una curva che sta deviando dal
comportamento rettilineo, per flettere verso un valore costante.
Vale la pena notare che, per determinare univocamente l’andamento della
velocità, è necessario identificare il rapporto
𝜏=
𝑘
→ 𝑣(𝑡) = −𝑔𝜏(1 − e−𝑡/𝜏 ) ,
𝑚
che rappresenta il tempo caratteristico del fenomeno. In effetti, si può dire che,
trascorso un tempo pari a 10𝜏, la velocità ha raggiunto il valore limite.
Infine, eseguendo un’altra integrazione, non è difficile ottenere l’andamento della
ordinata al variare del tempo
𝑣(𝑡) =
𝑑ℎ
→ ℎ(𝑡) = ℎ(0) − 𝑔𝜏[𝑡 − 𝜏(1 − e−𝑡/𝜏 )] .
𝑑𝑡
(𝑖𝑖𝑖) Si osservi con attenzione il diagramma orario fornito dal testo: nell’intervallo
0 ≤ 𝑡 ≤ 1, il caso teorico (𝑅) e quello reale (𝑅) risultano indistinguibili, per cui le
due curve, che nell’origine assumono lo stesso valore ed hanno la stessa derivata
prima,
ℎ 𝑇 (𝑡) = 100 − 4.9𝑡 2 , ℎ𝑅 (𝑡) = 100 − 9.8𝜏[𝑡 − 𝜏(1 − e−𝑡/𝜏 )]
30
sono molto prossime. Pertanto, è difficile raccogliere dati affidabili in questa
sezione temporale e riuscire dai diagrammi assegnati a determinare il valore
dell’unico parametro 𝜏, ancora sconosciuto.
Invece, adoperando il modello reale, si nota che il corpo raggiunge il suolo
nell’istante 𝑡 = 7 𝑠, per cui deve risultare che
ℎ𝑅 (7) = 100 − 9.8𝜏[7 − 𝜏(1 − e−7/𝜏 )] = 0 →
7 100
−
= 1 − e−7/𝜏 .
2
𝜏 9.8𝜏
Questa equazione non lineare contiene l’incognita 𝜏 che si desidera stimare e si
può agevolmente risolvere per via grafica, rappresentando le due funzioni
𝑓(𝜏) =
7 100
(nero) , 𝑔(𝜏) = 1 − e−7/𝜏 (rosso) .
−
2
𝜏 9.8𝜏
Queste due curve si incontrano approssimativamente per
31
𝜏 ≅ 2.025 ,
mentre per valori elevati dell’incognita, dato che
7
1 − e−𝜏 ≅
7 49
−
per 𝜏 > 7 ,
𝜏 2𝜏 2
si può affermare che 𝑓(𝜏) > 𝑔(𝜏) e quindi non vi sono altre intersezioni.
32