“Misure
Misure Ottiche ”
Corsi di Laurea Magistrale in Ingegneria
Elettronica e delle Telecom. e Fisica
T l
Telemetri
t i Ottici
Otti i
Cesare Svelto
Politecnico di Milano
Alcune immagini sono state tratte dal Libro “Electro-Optical Instrumentation:
Sensing and Measuring with Lasers” del Prof. Silvano Donati
1/57
Sommario
• Principi di misura e applicazioni
• Triangolazione
- passiva
- attiva
• A tempo di volo
- pulsati
- a onda
d continua (CW)
(
) [mediante modulazione sinusoidale]
- power budget nel telemetro laser e equazioni del sistema
ottimo rumore e accuratezza,
accuratezza ambiguità
- timing e filtraggio ottimo,
- ottiche di lancio/ricezione, sviluppi strumentali
• LIDAR (LIght Detection And Ranging)
2/57
Principi di misura nella Telemetria (1/2)
• tele-metria = distanza-misura = misura di distanza (anche misura a distanza)
si rileva la distanza L tra lo strumento e un oggetto remoto (bersaglio)
• a triangolazione (metodo trigonometrico)
il bersaglio è "triangolato" da due punti a distanza D su una stessa
linea di base (v.
(v misura di distanza delle stelle); misurando ll'angolo
angolo
tra le due linee di vista si ricava la distanza come L≅D/α (L=D/tgα)
• a tempo di volo (misura per conteggio di un intervallo di tempo)
laser pulsato o laser CW modulato sinusoidalmente ( fm)
T = 2L/c
2L/ ⇒ L=cT/2
L T/2 ∝ T ( "2L" percorrendo un cammino di andata-e-ritorno)
Δϕ = 2πfmT ⇒ Δϕ/2πfm=2L/c ⇒ L=c/2⋅Δϕ /2πfm=λm/2⋅Δϕ /2π ∝Δϕ
“conteggio
conteggio in termini di λm /2
/2”
( la risoluzione dipende da fm )
3/57
Principi di misura nella Telemetria (2/2)
• tele-metria = distanza-misura = misura di distanza (anche misura a distanza)
si rileva la distanza L tra lo strumento e un oggetto remoto (bersaglio)
• a interferometria ((mediante conteggio
gg di lunghezze
g
d'onda ottiche))
un fascio laser (monocromatico) è inviato al bersaglio e sulla luce di
ritorno si fa rivelazione coerente, con il battimento su un fotorivelatore; il
segnale rivelato va come cos(2kL), con k
k=2π/
2π/λ, e dalla fase della funzione
coseno si può "contare" l'incremento di distanza in termini di λ/2 e sue
frazioni, da 0 sino a L oppure per piccole variazioni ΔL a partire da un L*
Δϕ = 2kL ⇒ Δϕ =2⋅2π/λ⋅L ⇒ L =λ/2⋅Δϕ /2π ∝Δϕ
“conteggio L in termini di λ/2”
( la ris.
ris dipende da λ del laser )
con λ tipicamente di ≈0.5 μm (VIS)
si conta L in termini di
d ΔL=250
L 250 nm (risolvendo
(
l
d Δϕ =2π)
2 )
ma con Δϕ =π o π/2 si ottiene ΔL=125 nm o ∼60 nm
4/57
Campi di misura per i telemetri ottici
Misure di distanza e spostamento
A TRIANGOLAZIONE A MODULAZIONE DI INTENSITA' INTERFEROMETRICI
(massimizza P ottica con
allineamento del fascio)
short-range
h t
[0.1-10 m]
(misura incoerente-ottica)
TELEMETRI
PULSATI
(misura fase ottica
rivelazione coerente)
very high-resolution
hi h
l ti
[ΔL=100-10 nm]
A MODULAZIONE SINUSOIDALE
(misura tempo di volo) (misura sfasamento su luce modulata)
geodesy radar,
geodesy,
radar long
long-range
range
topography short range
topography,
[1-1000 m]
[0.1-10 km]
5/57
Metodo di misura per triangolazione
TELEMETRO
BERSAGLIO
α
• La misura diviene poco accurata su grande distanza
(di fatto per L>>D).
L>>D) Infatti
Infatti, se l'angolo
l angolo da rilevare diventa
piccolo (α<10 mrad= 0.57°) l'incertezza rel. Δα /α cresce
6/57
Triangolatore ottico passivo
D
D
L=
≅
tan α α
OCCHIO
dalla misura angolare
si ricava la distanza L
α/2
D/L=tanα
D
sensibilità di L
rispetto ad α
L
ΔL = − 2 Δα = − Δα = κ ⋅ Δα
α
D
si osservi che ΔL
errore o
cresce come L
ΔL
Δα
inc. o ris.
la ris. peggiora
=
−
∝
L
al crescere della
relativa
α
L
distanza
2
2
errore o
inc. o ris.
assoluta
l
INCertezza
ΔL
u (L ) = σ (L ) =
12
su mis. quantizzata
7/57
La “leva
leva ottica
ottica” sullo specchio
α
δ = α/2
γ
β
β
α
α 0= 0
δ = α/2
1. γ + β = 90°
2. α + 2β = 90°
3. γ - δ = 45°
da 1.−3. si ha δ + β = 45°
da 2./2 si ha α/2 + β = 45°
sottraendo a membro a
membro si ricava δ = α/2
8/57
Risoluzione e accuratezza in un
triangolatore ottico passivo (esempi)
• L'accuratezza/risoluzione
/
della misura di distanza dipende
p
dall'accuratezza/risoluzione con cui si determina l'angolo α
• Ad esempio, con un goniometro a vite micrometrica si può
risolvere
i l
Δα ≈ 3 mrad
d (0.17
(0 17 °) mentre con un encoder
d angolare
l
si può raggiungere Δα ≈ 0.1 mrad (0.0057 °)
E per L=1
Es.:
L 1 m scegliamo
li
D 10 cm ⇒ α ≅D/L=0.1
D=10
D/L 0 1 rad
d
3% vite ( 3 cm )
ΔL
=
L 0.1% encoder (1 mm )
se p
per L=100 m scegliamo
g
D=1 m ⇒ α =D/L=0.01 rad
ΔL 30% vite ( 30 m )
=
1% encoder (1 m )
L
sarebbe insensato
tenere D=10 cm
• Le prestazioni sono buone se D/L non diventa troppo piccolo
9/57
e quindi per range medio-brevi
Triangolatore ottico “attivo”
attivo (laser)
• Si eliminano le parti in movimento (rispetto al
triangolatore passivo) e si ottiene una risposta
molto rapida e accurata,
accurata e ben ripetibile
• Una λ nel visibile p
per semplicità
p
di “vedere il
bersaglio” (He-Ne a 633 nm o LD-VIS o Nd:YAG-2×)
• Ill fascio
f i llaser esegue un percorso di
d andata
d
e
ritorno dal telemetro al bersaglio. Misura con
sensore di posizione ottica (2Q/PSD/CCD) dell
dell’
angolo α tra il fascio d’andata e quello di ritorno.
L’ottica
L
ottica di ricezione è disassata a distanza D
dall’ottica di lancio: si ricava poi L=D/tanα
10/57
Triangolatore
g
laser o triangolatore
g
attivo
fill
L
α è misurato come
spostamento nel piano
focale della lente "rec"
x
α = atan(D/L)=atan(x/frec)
L = (D/x)frec∝ 1/x
wL w T
=
f ill
L
frec
Il filtro interferenziale rimuove
il disturbo da luce ambientale
wT wrec
=
L
f rec
f rec
⇒ wrec =
wL
f ill
11/57
Immagine da una lente sottile
in "ottica geometrica" [richiami]
p
1 1 1
+ =
p q f
q
Per un oggetto a distanza p=f
(distanza focale) dalla lente,
l'immagine si forma "all'infinito"
ovvero a una distanza q=∞
12/57
Dimensionamento della macchia laser
nel triangolatore attivo [passaggi]
h1
γ
L1
γ
asse ottico
h1 h 2
tan γ =
=
L1 L 2
h2
L2
verso il bersaglio
L
h1=wL e L1=ffill
⇒ wT = wL
h2=wT e L2=L
f ill
verso il rivelatore
h1=wT L1=L
f rec
h2=wrec L2=frec⇒ wrec = L wT
wrec= (frec /fill)wL
13/57
Equazioni
q
della misura
per il triangolatore ottico attivo (1/2)
Indichiamo con x la distanza della macchia rivelata sul
CCD dall'asse ottico della lente di ricezione (che a sua
volta è a distanza D, fissa, dall'asse ottico di lancio)
⇐
distanza
di
t
misurata
come angolo
⇐
conversione
da angolo a
spostamento
x ∝α ∝
1
L
A una piccola
l variazione L±ΔL corrisponde
d una var.
α m Δα e x m Δx (è la lente che converte α in x e Δα in Δx) 14/57
Equazioni
q
della misura
per il triangolatore ottico attivo (2/2)
La misura di L ricavata dalla posizione x sul CCD è
D
L = f rec
x
1
α
per cui,
i diff
differenziando
i d in
i L e in
i x, sii ottiene
tti
D
ΔL = − 2 f rec Δx
x
e infine
ΔL
Δx
Δα
=−
=−
L
x
α
come per il triangolatore passivo
ma con x e Δx al posto di α e Δα
f
ΔL = − rec ⋅ L2 ⋅ Δx ∝ L2
D
ΔL
∝L
L
ancora come per il
triangolatore ottico passivo
15/57
Esercizio sul triangolatore
g
laser
(formule "note": solo calcoli)
DATI: analogamente al caso del triangolatore ottico passivo,
lavoriamo con D=10 cm (e frec=25 cm) per L=1 m
e consideriamo ora wL=5 μm e wCCD=10 μm:
10 cm
D
x = − f rec =
250 mm = 25 mm
L
1m
Se risolviamo Δx =10 μm(≈ wCCD) ul rivelatore,
ΔL Δx 10 ⋅ 10
=
=
L
x
25
−3
= 4 ⋅ 10
−4
( ΔL=400 μm )
( su L = 1 m )
D
Δα = 4 ⋅10 α ≅ 4 ⋅10
= 40 μrad
L
Ricordiamo che per il triangolatore passivo si aveva Δα ≈ 3 mrad
−4
−4
(goniometro micrometrico) e Δα ≈ 0.1 mrad (encoder angolare)
16/57
Esercizio sul triangolatore
g
attivo
(con dati, calcoli e passaggi per ricavare wrec)
h1
γ
L1
γ
asse ottico
h1 h 2
tan γ =
=
L1 L 2
h2
L2
DATI:
L 1 m wL=55 μm
L=1
m
fill=125 mm frec=250 mm
L
1000
h1=wL e L1=fill
⇒ w T = wL =
⋅ 5 μm = 40 μm
h2=wT e L2=L
f ill
125
h1=wT L1=L
f rec
250
⇒
w
=
w
=
h2=wrec L2=frec rec L T 1000 ⋅ 40 μm = 10 μm
wrec= ( frec /fill)wL=10 μm ≈ wCCD17/57
Interpolazione
p
nel triangolatore
g
laser
La risoluzione spaziale Δx sul CCD limita la risoluzione
angolare
l
Δα e dunque
d
la
l ris.
i ΔL nella
ll misura
i
di di
distanza
t
Sfruttando l'estensione spaziale
p
della macchia laser
sul CCD, si può interpolare su più pixel illuminati e
risolvere agevolmente anche la frazione di pixel (ad
es Δx=0.2w
es.
Δx=0 2wCCD o anche meno) con il conseguente
miglioramento in risoluzione angolare e di distanza
ESERCIZIO
ESERCIZIO:
impiegando un triangolatore con una macchia laser
(gaussiana) con dimensione wrec=50 μm
m su un CCD da
1024 pixel (a 12 bit in ampiezza e con wCCD=10 μm),
si vuole ricavare la posizione del "centro
centro di macchia"
macchia
ottenuta per interpolazione tra i pixel illuminati
18/57
Esercizio sul triangolatore
g
laser
DOMANDE:
- se il laser del telemetro è un He-Ne a 633 nm, quale
tipo di CCD
CCD conviene
conviene impiegare?
impiegare? perché?
perché?
- quanti e quali pixel
pixel sul
sul CCD
CCD sono
sono "sufficientemente
"sufficientemente
illuminati" quando
illuminati
luce
fondo
illuminati"
illuminati
quandola
la"luce
"luce
lucedi
difondo"
fondo"
fondo copre
copre1/100
1/100(in
(in
ampiezza) della dinamica di misura?
posizione del
- come conviene ricavare la posizione
del centro
centro dello
dello
spot sul
spot
sulCCD?
CCD?quanto
quantoèèlargo
largolo
lospot
spot"visibile"?
"visibile"?
accuratezza?
- quali sono i limiti all
all'accuratezza?
- ipotizzando di poter ottenere una risoluzione di 0.1
pixel si ricavi la risoluzione
pixel,
risoluzioneassoluta
assolutadel
deltelemetro
telemetroalla
minima
distanza
misurabile
Lmin=10
m m
alla
minima
distanza
misurabile
Lmin=10
19/57
Esercizio sul triangolatore
g
laser
RISPOSTE:
- per un laser a He-Ne
He Ne nel rosso conviene impiegare
un CCD al silicio, sensibile nel visibile ed economico
- per calcolare
l l
quanti
ti e quali
li pixel
i l sull CCD sono
"sufficientemente illuminati", occorre prima stabilire
cosa intendiamo p
per "sufficientemente illuminati":
siccome il singolo pixel risolve N=2n=212=4096 livelli
di fotocorrente e dunque di potenza ottica incidente,
diremo che un pixel è suff.
suff illuminato (SNR=1) se la
fotocorrente di segnale è uguale alla fotocorrente
minima rivelabile ((dettata dalla q
quantizzazione o dal
rumore elettronico del rivelatore + la "luce di fondo")
[in generale un pixel è illuminato se il suo livello di segnale di luce
porta l'uscita a un livello diverso da zero (sola quantizzazione) oppure
il pixel è bene illuminato quando il suo livello di "segnale" è >1/100
del picco/dinamica del segnale ottico ("rumore" e luce di fondo)] 20/57
Esercizio sul triangolatore
g
laser
La potenza ottica sul singolo pixel è ll'intensità
intensità ottica
per la dimensione (area) del pixel (precisamente,
occorre integrare l'intensità
l intensità sulla superficie del pixel)
L'intensità ottica decresce come exp(-2r2/w2rec)
allontanandosi dal picco (in r =0).
=0) Dunque si otterrà
1/M-esimo del valore di picco quando 2r2=w2recln(M)
ovvero r/wrec=(0.5lnM)
(0.5lnM)0.5=[0.5⋅2.3⋅log
[0.5 2.3 log10M]0.5
Si ottiene allora
r≈k⋅wrec con k =[0.5⋅2.3⋅log10M]0.5
naturalmente poi wrec corrisponde a un certo numero di pixel
e quindi r è esprimibile "conteggiato in pixel"
21/57
Esercizio sul triangolatore
g
laser
per 1/M=1/10 del picco, r ≅ 1.1⋅wrec
sola quantizzazione: [d'altronde exp(-2)=13 %≈1/10]
sii otterrà
tt à 1/4096 ≈ 1/4000 d
dell valore
l
di picco
i
quando
d
2r2=w2recln(4000) (≈ 4000 sono i livelli di ampiezza per n=12 bit)
0 5=[1.15⋅log
0 5=[1.15×3.6]
0 5≈2
r/wrec=(0.5⋅ln4000)
=(0 5 ln4000)0.5
=[1 15 log104000]0.5
=[1 15×3 6]0.5
si ottiene allora r≈2wrec=2⋅50μm≅100μm il che
corrisponde a 10 pixel di dimensione 10 μm (partendo
dal centro della gaussiana). Il totale di pixel bene
illuminati è dunque 20 pixel (±10), per una dimensione
(diametro) dello spot "visibile" di circa 200 μm
con rumore e fondo (a 1/100 dal picco):
si otterrà 1/100 del valore di picco per 2r2=w2recln(100)
r/wrec=(0.5⋅ln100)
(
)0.5=[1.15⋅log
g10100]0.5=[2.3]0.5≈1.5
e r≅75μm con uno spot ben illuminato di circa 150 μm,
come diametro, il che corrisponde a 15 pixel
22/57
Esercizio sul triangolatore
g
laser
usando come pesi le fototensioni corrispondenti
- La p
posizione dello spot
p sul CCD p
può essere ricavata
dalla media pesata dei punti della gaussiana, magari
sottratto il rumore di fondo, e preferibilmente dalla
media
di dei
d i soli
li punti
ti b
bene ill
illuminati;
i ti oppure d
da una
regressione ai min. quad. con funz. (gaussiana + offset):
immaginiamo di riuscire a ottenere Δx
Δx=00.1pixel
1pixel=1μm
1μm
- I limiti all'accuratezza sono imposti dal rumore al
rivelatore (luce ext., rumore shot, corrente di buio del
CCD, altro rumore quantizz./elettronico) che può dare
una stima errata del baricentro della gaussiana ideale
- Il CCD ha dimensione xmax=1024⋅10μm≈1cm e,
/ max=Δα/αmax=-ΔL/L
/ min, la
considerando che Δx/x
risoluzione assoluta cercata è ΔL=Lmin(Δx/xmax)=
=10m⋅(1μm/1cm)=1mm [su dieci metri: 10-4]
23/57
Telemetri a tempo di volo
( i i i e equazioni
(principio
i i di funzionamento)
f
i
)
La radiazione laser percorre un cammino 2L (andata e ritorno)
in un tempo T,
T viaggiando a velocità c ≈ 33⋅10
108 m/s
ΔL è costante
e dipende
di
d solo
l
dal ΔT che si
riesce a risolvere
Ad es., per risolvere ΔL =1 m occorre ΔT=2⋅1m/3⋅108 m/s ≅7 ns ≈τ (limite
per laser Q-switching; per τ più brevi occorre mode-locking; potenza...)
per ΔL =1 mm Æ ΔT≅7 ps… difficile andare sotto il mm con TOF convenzionale
24/57
Telemetri a tempo
p di volo
(risoluzione spaziale e temporale)
La risoluzione spaziale ΔL della misura dipende dalla
risoluzione temporale ΔT e dunque dalla durata dell'impulso
Per risolvere un intervallo ("distanza")
( distanza ) temporale ΔT occorre
lavorare con impulsi di durata τ <≈ΔT e quindi anche con
un'elettronica di fotorivelazione "veloce" con banda B≈(1/τ) 25/57
Telemetri a tempo
p di volo
(misura di intervallo di tempo)
La misura dell'intervallo di tempo T si fa con un contatore
elettronico, che "conta" la distanza tra tstart (impulso lanciato
e tstop (eco ricevuto), sui segnali elettrici fotorivelati.
L posizione
La
i i
degli
d li impulsi
i
l i sull'asse
ll'
del
d l tempo
t
è determinata
d t
i t d
da
un discriminatore a soglia (trigger) sugli impulsi di tensione
T
Tc
tstart
Tc
tstop
t
T = Tstop
– Tstart
t
t t ≅ N TC
Non è detto che un particolare tempo t cada esattamente su
una transizione del clock e q
quindi nella misura di t ci sarà
una risoluzione finita Tc del contatore elettronico, con
incertezza di quantizzazione uq(t)=σ (t)=Tc / 12
26/57
Telemetri a tempo
p di volo
(incertezza di misura per T=tstop-tstart)
Se si ha incertezza u(t)=uq(t) sia su tstart che su tstop allora
l'incertezza complessiva sulla misura del tempo di volo T
è u(T)
( ) = [u
[ 2((tstop))+u2((tstart)]1/2 = 2 uq((t)) = TC/ 6
Se tstart fa partire il clock con periodo TC allora u(tstart)=0
[ gli impulsi di clock partono al tempo t=tstart ]
e per il tempo di volo si ha u(T) = u(tstop) = TC/ 12
In generale, scegliendo il periodo Tc del clock sufficientemente
breve, l'incertezza di misura dipenderà
p
da altri fattori
(dominanti sulla “piccola quantizzazione”):
in particolare dal rumore di ampiezza al discriminatore di
soglia (trigger). Tale rumore dipenderà dal rumore elettronico
del circuito e dal rumore di ampiezza sul segnale fotorivelato
27/57
Telemetri a tempo
p di volo
(discriminazione a soglia e rumore: σ 2)
Il tempo
p di volo è misurato come T = tstop - tstart e la
varianza associata è σ 2(T)=σ 2(tstart)+σ 2(tstop)≅σ 2(tstop)
segnale più
rumoroso
La rivelazione dell'impulso di luce che segna tstop è "più rumorosa" (ovvero con SNR
più basso)) in q
p
quanto il segnale
g
di luce di ritorno dal bersaglio
g è molto p
più debole di
2
2
quello lanciato σ (tstop)>>σ (tstart)
S
S(t) + σs (t)
La posizione degli impulsi
sull'asse del tempo è
determinata da un
discriminatore a soglia
g
σS
soglia S 0
(trigger) che agisce sul
segnale S(t) all'uscita
del foto
foto-rivelatore
rivelatore
Il rumore di ampiezza σS
si traduce in un rumore di
tempo σt secondo la pendenza
nel punto di trigger
t
S(t) mean signal
S(t) - σ s (t)
t
output from the
trigger circuit
0-
σt
t0
t 0 + σt
28/57
Telemetri a onda continua
(principio)
Potenza ottica modulata sinusoidalmente a frequenza
q
fmod
P(t) = P0 [1+m⋅ sin(2πfmodt)]
Tmod=1/fmod
P
t
P
r
2L/c
Si rivela il ritardo di fase
Δϕ tra segnale ricevuto (Pr)
e segnale trasmesso (Pt)
29/57
Telemetri a onda continua
(equazioni di funzionamento)
P
t
P
r
dice come varia Δϕ ((misurando))
per una variazione della distanza L
δ ((uscita))
2L/c
con fmod=10 MHz
e δ ((Δϕ))=2 mrad
si ottiene δ (ΔL)≅5 mm
δ ( Δϕ ) 2 πf mod
S=
=
=
∝ f mod
δ (ingresso) δ (L )
c /2
La sensibilità della misura ((di fase Δϕ) cresce all'aumentare
della frequenza di modulazione, ma se fmod è troppo alta si
avranno altri problemi (ambiguità della misura)
30/57
Power budget per i telemetri ottici
Ps
Dcc
angolo di
divergenza
di
"pieno"
Pr
Naturalmente L >> fs, fr, Ds, Dr
31/57
Bersaglio cooperativo (riflettente) (1/2)
Quando il bersaglio è cooperativo, ad es. un corner cube, si
comporta
t come uno specchio
hi e quindi
i di il ricevitore
i it
vede
d la
l
riflettente
sorgente come se fosse a una distanza 2L superficie
di dimensione infinita
D=θs⋅2L Dr
D'=θs⋅L
L
La dimensione di macchia (diametro) a una distanza 2L è
θs⋅2L e dunque
q la frazione di p
potenza raccolta ((rispetto
p
alla
potenza lanciata dalla sorgente), su un'area circolare di
diametro Dr (lente ricevente) posta a distanza 2L è pari a
tutto il
(
π/4 ) Dr2 rapporto tra l'area del ricevitore se
Pr
ricevitore
=
è illuminato
2
2 e l'area del fascio d'arrivo
(
)
P
π/4 θ 4L
s
s
rapporto d'aree al ricevitore
(D>Dr)
32/57
Bersaglio cooperativo (riflettente) (2/2)
Se il corner cube ha un diametro inferiore a quello dello spot laser
che
h lo
l investe
i
(Dcc<θsL ovvero "corner
"
cube
b che
h diaframma")
di f
") e il
ricevitore raccoglie tutto il fascio riflesso, si ha
Pr D
=
Ps θ L
2
cc
2 2
s
rapporto d'aree
d aree al CC
(2D )
2
cc
Dr
Dcc
Dr > Dcc+θsL > Dcc+ Dcc = 2Dcc ⇒ Dcc < Dr/
/2
θ 4L2
2
s
è come
un r. con
Dr=2Dcc
Se oltre al corner cube anche il ricevitore diaframma il fascio, si ha
nuovamente (come per il riflettore infinitamente esteso)
rapporto
t d'
d'aree all ricevitore
i it
2
r
r
2
2
s
s
P
D
=
P θ 4L
Dr
α1 =
Dcc2
(θ L )
s
Dr
2
α2 =
Dr2
(2D )
2
α = α 1 ⋅α 2 =
cc
(θ
Dr2
s
2L )
2
Dcc
Dcc
La condizione di ricevitore che diaframma vale quando Dr/2L < Dcc/L
⇒ solo per Dcc< Dr /2 sarà il corner cube a diaframmare
Dr 2Dcc
33/57
Bersaglio
g non-cooperativo
p
((diffondente))
Quando il bersaglio è non
non-cooperativo,
cooperativo, la superficie illuminata,
di area AT, è diffondente con un coefficiente di diffusività δ < 1
radianza (W⋅m-2⋅Sr-1)
34/57
Bersaglio
g non-cooperativo
p
((diffondente))
IIndicando
di
d con Ωr l'angolo
l'
l solido
lid con cuii il bersaglio
b
li vede
d
il ricevitore , sarà
πD
Ω r = πθ =
4L
2
r
2
r
2
essendo θr = (Dr/2)/L
e dunque la potenza raccolta al ricevitore è
δ Ps
angolo di vista
del ricevitore
dal bersaglio
πD
D
Pr = B ⋅ AT ⋅ Ω r =
⋅ AT ⋅
= δ Ps
πAT
4L
4L
2
r
2
2
r
2
con una frazione
f
di
d potenza raccolta
l
Pr
Dr2
=δ 2
Ps
4L
come per il cooperativo
ma con δ all posto
t di 1/θs2
e naturalmente δ ≤ 1<<1/θs2
35/57
Angolo
g
solido
2 πρ ⋅ dρ 2 π
2π r 2
r2
Ω = ∫ dΩ = ∫
= 2 ∫ ρ ⋅ dρ = 2
=π 2
2
R
R
R
2
R
0
0
r
r
Def. # Il radiante
Def
è l'angolo piano che
sottende, su una
circonferenza
f
centrata
nel suo vertice, un arco
di lunghezza uguale al
raggio (della circonf.).
( r <<R )
S
R2
Def. # Lo steradiante
Def
è l'angolo solido che
sottende, su una sfera
centrata nel suo vertice,
una calotta sferica di
area uguale al quadrato
del raggio (della sfera).
36/57
Power budget
g con diffrazione e
perdite aggiuntive
Tenendo
T
d conto anche
h delle
d ll perdite
di di potenza delle
d ll ottiche
i h
attraversate (Topt ≤ 1) e della tratta 2L in atmosfera (Tatm≤ 1):
⎡ Pr ⎤
Dr2
⎢ P ⎥ = ToptTatm θ 2 4L2
⎣ s ⎦C
s
⎡ Pr ⎤
Dr2
⎢ P ⎥ = ToptTatmδ 4L2
⎣ s ⎦ NC
Pr
2
= G ⋅ FOVeq
Ps
Dr / 2
con FOVeq =
Leq
Si può infine scrivere una espressione generalizzata
Pr
Dr2
=G 2
Ps
4Leq
Leq = L / Tatm
lunghezza
equivalente
Topt /θ s2 cooperativo
G=
Toptδ
g
guadagno
g
equivalente
non-cooperativo
37/57
Guadagno
g del telemetro
Il guadagno del telemetro può anche essere G>>1 nel
caso di un bersaglio cooperativo
G = Topt /θ s2 ≈ 10 6
se θs=11 mrad
d e Topt≅11
e in questo caso l'espressione è del tutto analoga al
"guadagno
d
d'antenna"
d
in una trasmissione radio
d
Il guadagno del telemetro è sempre G<1 nel caso di un
bersaglio non-cooperativo (δtyp.=0.5-0.1)
Delle buone ottiche (trattate antiriflesso alla λ laser) danno
perdita per riflessione <1%, ad ogni superficie attraversata,
e perdita
di per assorbimento+diffusione
bi
diff i
nell materiale
i l (vetro
(
o quarzo) <10-3 ⇒ trasmissività complessiva Topt>0.9-0.98≅1
38/57
Coefficiente di attenuazione
Durante la sua p
propagazione
p g
, il fascio laser subisce
perdite per assorbimento e diffusione da parte di
molecole o particolato comunque presenti nell'atmosfera
Tatm = exp ( -2α L ) =P(z=2L)/P(z=0)
α =a(λ )+s(λ )=α (λ )
assorbimento
dalla legge di
Lambert-Beer
coefficiente di attenuazione
scattering (diffusione)
Evitando i picchi di assorbimento molecolari, si può
approssimativamente
i
i
ritenere
i
α =0.1km
0 1k -11 per atmosfera
f
eccezionalmente limpida, α =0.3km-1 per atmosfera
limpida, α =0.5km
0.5km-1 per un inizio di foschia, e α >>0.5km
0.5km-1
in caso di nebbia: senza assorbimento α(λ)≅s(λ)
39/57
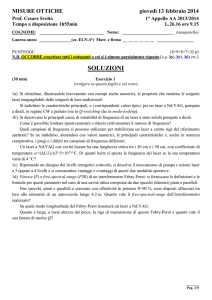
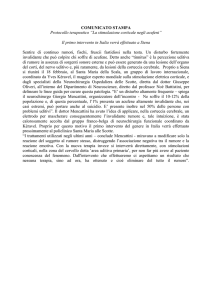
Attenuazione atmosferica
Naturalmente,, una volta fissato α , la trasmissione decresce
esponenzialmente con L (limitando la potenza ricevuta Pr)
1
-1
α = 0.05 km
atmospheric
transmittance
Tatm
0.1
-2
10
=exp -2αL
02
0.2
0.3
0.5
10-4
0
5
10
target distance L (km)
15
20
40/57
Attenuazione atmosferica (esempi)
(
p)
3.5
1
Per avere Tatm più
P
i alta
l possibile,
ibil
conviene evitare alcuni picchi di
assorbimento atmosferico (dove
(
α (λ) è massimo e Tatm è minimo):
e.g. 0.70, 076, 0.80, 0.855, 0.93,
1.13 μ
μm: → si usano laser a
He-Ne (0.633 μm) o a
Nd:YAG (1.064 μm) o ancora
LD-GaAlAs
LD
GaAlAs (0.82
(0 82-00.88
88 μm)
Con atmosfera eccezionalmente limpida, si può arrivare a 20 km (e
tornare!) con una trasmissione ∼10%
Con un po' di foschia, già a 10 km la trasmissione si è ridotta a ∼1%
Con la nebbia, anche a 1 km di distanza la trasmissione scende ben
sotto l'1‰ (con α=3.5 km-1 si ha Tatm=exp(-7)≅10-3 a 1 km)
41/57
Attenuazione atmosferica ((calcoli con exp)
p)
Tatm = exp(
p(−2αL20km ) = 10 −1
log10 [exp(−2αL20km )] = log10 10 −1
− 2αL20km
20k log10 e = −1
1
1
1 ln 10
α=
=
2 L20km log10 e 40 km ln e
2. 3
α=
km −1 = 0.0525 km −1
40
Tatm = exp(−2αL10km ) = 10 −2
l 10 [exp((−2αL10km )] = log
log
l 10 10 − 2
− 2αL10km log10 e = −2
1
1
1 ln
l 10 2.3
−1
−1
α=
=
=
km = 0.23 km
L10km log10 e 10 km ln e 10
[ ]
[ ]
42/57
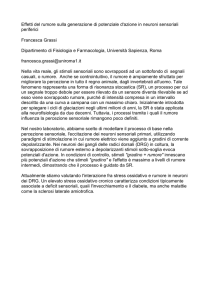
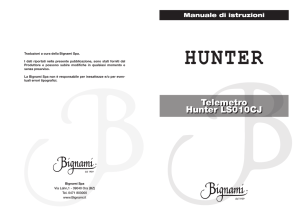
Attenuazione atmosferica (esempi)
(
p)
( A/W )
sole a mezzogiorno
AM0
1535 W/m2
2000
cell efficiency η
(scale at right)
GaAlAs
SPECTRAL IIRRADIANCE ES (λ)
(W/m2 μ
μm)
1800
1600
GaAs
0.8
Si
AM1
(90°)
925
1400
θ
AM1.5
(42°), 807
0.6
1200
1000
AM2
(30°)
719
0.4
AM4
(14°)
529
800
600
AM7
(8 2°)
(8.2°)
324
0.2
400
200
VIS
AM10
(5 7°))
(5.7
234
0
0
400
500
alba o tramonto
600
700
800
WAVELENGTH
900
λ
1000
(nm)
1100
1200
1300
Lo spettro della luce
solare che raggiunge la
superficie terrestre rivela
le finestre di trasparenza
e i picchi di assorbimento
dell'atmosfera
AM=(sinθ )-1 "Air Mass"
dove θ è ll'angolo
angolo di
arrivo rispetto alla
superficie terrestre
(("orizzonte")
orizzonte )
θ = Sun elevation
Si osservi come per
angoli di elevazione bassi
lo spettro e.m. della luce
solare si impoverisce
della luce blu (scattering
∝λ-4) colorandosi,
relativamente, di rosso
43/57
Equazioni
q
di sistema e SNR nel telemetro
Il circuito di fotorivelazione e amplificazione
p
del segnale
g
ricevuto avrà un rumore che va sommato al rumore ottico
e shot per ottenere la potenza complessiva di rumore Pn
(riportata come potenza ottica incidente sul fotodiodo)
Il segnale
g
fotorivelato ha p
potenza ottica Pr ((che dipende
p
da Ps)
Se si vuole lavorare con un dato rapporto (S/N)=Pr /Pn
al ricevitore del telemetro,
telemetro occorre imporre la condizione:
4L
4L ⎛ S ⎞
GPs = 2 Pr = 2 ⎜ ⎟ Pn
Dr
Dr ⎝ N ⎠
2
eq
q
2
eq
q
potenza equivalente
l
del telemetro
avendo
ricordato
che
Pr
Dr2
=G 2
Ps
4Leq
2
⎛ S ⎞ GPs D
⎧D⎫
∝⎨ ⎬
⇒⎜ ⎟=
⎝ N ⎠ Pn 4 L
⎩ L ⎭44/57
2
r
2
eq
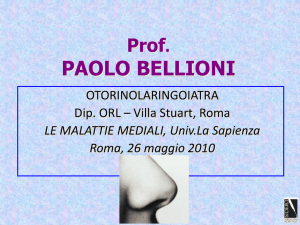
Potenza vs distanza (equivalenti)
( q
)
no rec
is ei
e ve
po r
w
er
1M
GPs ∝ L2 deve aumentare di due ordini di grandezza per ogni aumento di L
di un ordine di gradezza
=
P n mW
1
Telemetro pulsato
Ep≈2mJ τ ≈10ns Ps,p=0.2MW
G≈δ ≈0.5 (non
(non-cooperativo)
cooperativo)
2
1
μW
B ≈ 1/τ = 100MHz
1k
1
G P
nW
Pn ≈ "μW"
" W"
W
1
ottica
pW
Telemetro a onda continua
Ps=0.1mW G=104 (θs=10mrad)
1
1
in,2 rec = 2eI rec B
Pn ∝ in,n rec ∝ B
S/N = 10
D r =100mm
Tmis=10ms-1s
B = 1/2Tmis = 100Hz-1Hz
Pn ≈ "nW"
1m
0.1
1
10
L T
100
0 5
45/57
Rumore al ricevitore del telemetro
P potenza ottica; I corrente in DC; i corrente in AC
3 contributi di rumore "ottico" alla p
potenza di rumore Pn:
- rumore Pn,r associato al segnale ricevuto (Pr)
- rumore Pn,bg
luce di fondo"
fondo (Pbg sul ricevitore)
n bg associato alla "luce
- rumore Pn,el del rivelatore e del suo amplificatore (front-end)
Pn = Pn,s + Pn,bg + Pn,el
Ir=ρ Pr è il segnale "utile",
utile , Ibg=ρ Pbg è il background e
naturalmente Irec=Ir+Ibg
(resp. ρ =ηe/hν)
Valutiamo il rumore di corrente irec sull
sull'uscita
uscita Irec del fotodiodo:
in realtà questo rumore è
- rumore shot su Ir → ir2 = 2eIrB → in,s
osservato DOPO il
ma viene
- rumore shot su Ibg → ibg2 = 2eIbgB → in,bg fotodiodo
"riportato" al suo "ingresso"
- rumore dell'elettronica → iel2 = 2e"Iel,0"B → in,el
46/57
Rumore al ricevitore del telemetro
corrente “equivalente” in DC
A partire dai 3 contributi di rumore:
genera un rumore shot
che g
- rumore shot
h t su Ir → ir2 = 2eI
2 IrB → in,s
pari al rumore elettronico
all’ingresso del
- rumore shot su Ibg → ibg2 = 2eIbgB → in,bg riportato
ricevitore (fotodiodo)
- rumore dell'elettronica
dell elettronica → iell2 = 2eIel,0
l 0B → in,ell
la potenza/varianza complessiva del rumore di corrente
(somma di varianze per g
grandezze incorrelate) vale:
.../ρ 2
irec2 = in,s2 + in,bg2 + in,el2 = 2eB ( Is + Ibg + Iel,0 )
Dividendo
Di
id d lle d
due ffotocorrenti
t
ti DC e lla corrente
t equivalente
i l t
di rumore elettronico per la sensibilità spettrale (ρ 2)
si ottiene il rumore sulla p
potenza ottica al ricevitore:
Pn2 = ( 2hν /η ) B ( Pr + Pbg + Pel,0 )
Consideriamo adesso alcuni andamenti tipici del rumore
elettronico in,el (A/Hz1/2) per fotorivelatori (fotodiodo+ampl.)
a semiconduttore, al variare della frequenza di lavoro...
47/57
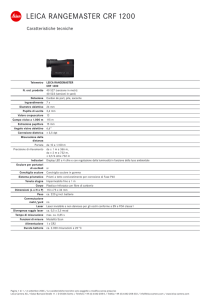
Andamenti del rumore nei fotoricevitori
InGaAsP-pin + IC
noise spe
ectral density
y In /¦B (pA/¦Hz )
10
Si i + FET
Si-pin
InGaAsP
APD
1
Si-pin + BJT
Si-APD
0.1
vedere
d
((e "rivedere")
" i d ")
esempi del Libro
0.01
PMT
1M
10M
100 M
maximum frequency f
2(Hz)
Area riv. A<0.5mm2
Capacità
Capac
tà C
C<0.5pF
0.5p
1G
48/57
Valutazione della "luce di fondo"
(potenza ottica di background Pbg)
Si parte dal diagramma di irradianza solare mostrato (luc.42) in
precedenza.
d
Dalle
ll condizioni
d
di
d lavoro
l
(AM,
(
nuvolosità,
l
etc.)) si
ricava l'irradianza spettrale della scena Escena (W/m2μm) che
moltiplicata ("integrata")
( integrata ) per la larghezza di banda Δλ
del filtro interferenziale da l'intensità ottica della luce di fondo
Iscena = Escena ⋅ Δλ
(W/m2)
intensità "di
di fondo
fondo" della scena
La potenza ottica raccolta al ricevitore è 1/π volte l'intensità
di fondo (Isc) per il coefficiente di diffusività della scena (δsc )
per l'angolo solido (Ω sc) di vista [intensità ricevuta Ibg]
poi moltiplicata per l'area del rivelatore (A=πdr2/4):
2)
I
=
(1/π)[
δ
I
]
⋅
Ω
(W/m
sc sc
sc
Ωsc=πNA2 bg
Pbg = [ δs Esc Δλ ΝΑ2 ] ⋅ (πdr2/4) (W)
essendo Ω =πθ 2≅π(NA)2 con NA=sin(Dr/2f ) apertura numerica
( in questo lucido "I" indica una intensità ottica e non una corrente )
49/57
Accuratezza del telemetro pulsato
p
T
c
L=c
⇒
σ L = σT
2
2
T = Tstopp − Tstart
2
2
2
2
σ T = σ stop + σ start ≅ σ stop
S(t) + σs (t)
S(t) mean signal
S(t) - σ s (t)
σ =
2
T
σ
S0
2
S
dS /dT
2
output from the
trigger circuit
t 0 - σt
t0
t 0 + σt
In un ricevitore ben progettato (shot-noise limited, SNL)
σT ∝
τ
Nr
numero di fotoni ricevuti (su un singolo impulso
o anche come cumulo da "media" di N impulsi)
In generale, se non SNL, pesa anche il contributo del rumore dovuto
alla luce di background a e all’elettronica, peggiorando le prestazioni!
50/57
Accuratezza del telemetro
a modulazione sinusoidale
1
1
σT ∝
2π fm Nr
c
e ancora σ L = σ T
2
In analogia con il telemetro pulsato, adesso il termine 1/2πfm
è equivalente alla durata τ dell
dell'impulso:
impulso:
- telemetro pulsato conviene lavorare con impulsi corti (τ basso)
- telemetro a modulazione sinusoidale conviene lavorare
con una alta frequenza di modulazione elevata ( fm alta)
Solitamente τ ≈10ns << (1/2πfm)≈1μs per una tipica fm=200kHz
per cui σ T,p<<σ T,CW-mod. (come SNL) ma per il rumore dell'elettronica
Bp ≈1/τ ≈100MHz >> BCW-mod.≈1/2Tmis ≈100Hz-1Hz (difficile SNL nel pulsato)
Si vorrebbe lavorare a fm alta (o ad elevata cadenza di
ripetizione degli impulsi, per "fare medie") ma ciò comporta
51/57
altri problemi di ambiguità della misura di distanza
Ambiguità
g
nei telemetri a tempo
p di volo
Essendo il segnale (trasmesso e quindi anche quello rivelato)
di tipo periodico, nasce un problema di ambiguità nel dover
distinguere bersagli a distanza diversa che possono ritornare
un segnale con la stessa informazione di misura (tempo di
volo "misurato" o sfasamento "cumulato" nel round-trip):
Per non avere ambiguità nella misura deve essere:
- telemetro pulsato:
p
Tmax=T(Lmax) ≤ Trep
⇒ Trep ≥ Tmax
2 LNA
1
Tmax =
≤
- telemetro a modulazione sinusoidale:
c
f tel
ϕmax=ϕ (Lmax)=2πfmTmax ≤ 2π ⇒ fm≤ 1/ Tmax
dove Tmax è il massimo tempo di volo corrispondente alla
massima distanza Lmax, detta LNA, correttamente misurabile
52/57
Ambiguità
g
nei telemetri a tempo
p di volo
TRANSMITTER
z=0
cos 2π f m t = cos 2π t/Tm
TARGET
RECEIVER
z=L
z=2L
L/c
2L/c
OK
T m > 2L/c
0
T m < 2L/c
Σ i C(t-iT
C(t iT r )
T r > 2L/c
Tr
Tmax
Pb.
amb.
time t
OK
Pb.
< 2L/c amb.
amb
2 LNA
=
c
Se fmod è "bassa" e Trep "alto"
(o ancora frep bassa) non ci sono
problemi di ambiguità
53/57
Ambiguità
g
nei telemetri a tempo
p di volo
- telemetro pulsato:
p
laser Q-switch τ ≈10 ns frep=10Hz÷10kHz (repetition rate)
da Trep=T
Tmax si ottiene LNA=(c/2)T
(c/2)Trep=c/2f
c/2frep=15000km÷15km
15000km÷15km
il problema si pone solo per grandi distanze e/o alle alte
q
di ripetizione
p
dell'impulso
p
[[si ricorda che conviene
frequenze
ripetere e la misura dei singoli impulsi per migliorare l'accuratezza ("medie")]
- telemetro a modulazione sinusoidale:
laser a diodo con fm=10MHz÷10kHz (si modula la corrente)
da fm=1/T
1/Tmax=1/(2L
1/(2LNA/c) si ottiene
LNA=(c/2)Tm=(c/2)⋅(1/fm)=15m÷15km
il p
problema si p
pone g
già a medio-breve distanza
Per avere accuratezza si desidera fm alta ("medie") ma per "andare lontano"
si deve tenere fm bassa... si possono usare 2 distinte frequenze fm1 e fm2 54/57
LIDAR
Light Identification Detection And Ranging
molto
lt simile
i il a un ttelemetro,
l
t è uno strumento
t
t per lla misura
i
a
distanza delle proprietà di un mezzo all'interno del quale si
trasmette ((e si retrodiffonde,, backscattering)
g) l'impulso
p
ottico
55/57
LIDAR
Sorgente
g
laser con elevata p
potenza di p
picco ((Q-switch))
e a una o più lunghezze d'onda opportune per misurare
picchi di assorbimento/scattering del componente presente
nel mezzo (gas o particolato in atmosfera,
atmosfera oppure
inquinanti o plancton/clorofilla/alghe nell'acqua, etc.).
Pbs (t) = S(t)
time
S(t) (z/ct )
2
segnale di backscattering
0
0
time
(tecnica OTDR)
56/57
LIDAR
Dalla misura del tempo di volo t =2L/c si deduce la distanza
d l bersaglio
del
b
li analizzato
li
(τ → porzione
i
di volume
l
analizzato);
li
)
dall'intensità del segnale retrodiffuso si deduce la
composizione chimico/fisica del volume in analisi;
si costruiscono mappe, anche in falsi colori, in funzione
dell'angolo
g
di elevazione del telemetro e della distanza.
57/57