Parte I (introduzione)
Espressione dell’incertezza di misura (UNI CEI 9)
L’incertezza rappresenta in generale un
dubbio. Il dubbio circa la validità del risultato
di una misurazione viene espresso mediante
l’incertezza di misura.
Incertezza di misura
Parametro, associato al risultato di una
misurazione, che ne caratterizza la
dispersione dei valori ragionevolmente
attribuibili al misurando.
Il parametro può essere uno scarto tipo o la
semiampiezza di un intervallo avente un livello
di fiducia stabilito.
L’incertezza di misura, in generale, dipende da
più componenti. Talune possono essere valutate
dalla distribuzione statistica dei risultati di serie di
misurazioni, altre sono valutate da distribuzioni di
probabilità ipotizzate.
Parte I (introduzione)
Espressione dell’incertezza di misura (UNI CEI 9)
Il problema dell’espressione dell’incertezza
venne posto nel 1977 dal Comitato
Internazionale dei Pesi e delle Misure (CIPM).
L’Ufficio Internazionale dei Pesi e delle
Misure (BIPM) produsse quindi nel 1980 la
raccomandazione
INC-1
intitolata
Espressione delle incertezze sperimentali.
Norma UNI CEI 9 “Guida all’espressione
dell’incertezza di misura” (ISO Guide to the
expression of uncertainty in measurement –
1995).
http://www.bipm.org/utils/common/documents/jcgm/JCGM_
100_2008_E.pdf
La norma stabilisce le regole generali per la
valutazione e l’espressione dell’incertezza di
misura.
Parte I (introduzione)
Espressione dell’incertezza di misura (UNI CEI 9)
Il metodo ideale per la valutazione
dell’incertezza
del
risultato
di
una
misurazione deve essere:
1.Universale: il metodo deve essere
applicabile a tutti i tipi di misurazione e di
dati in ingresso.
2.Internamente coerente: l’incertezza deve
essere
direttamente
derivabile
dalle
componenti
che
vi
contribuiscono,
indipendentemente dal modo in cui queste
vengono raggruppate.
3.Trasferibile: l’incertezza valutata per un
risultato deve essere direttamente utilizzabile
come
componente
nella
valutazione
dell’incertezza di un’altra misurazione nella
quale intervenga il primo risultato.
Parte I (introduzione)
Espressione dell’incertezza di misura (UNI CEI 9)
Raccomandazione INC-1 (1980)
1)
L’incertezza del risultato di una misurazione consiste
in genere in svariate componenti che possono
essere raggruppate in due categorie a seconda del
modo in cui se ne stima il valore numerico:
A. quelle valutate per mezzo di metodi statistici;
B.
quelle valutate mediante altri metodi.
…….
2) Le componenti appartenenti alla categoria A sono
caratterizzate dalle loro varianze stimate si2 ……..
3)
Le componenti appartenenti alla categoria B
devono essere caratterizzate da grandezze uj2,
interpretabili come approssimazioni delle varianze
corrispondenti ……..
4)
L’incertezza composta deve essere caratterizzata
mediante il valore numerico che si ottiene
applicando il metodo abituale per la composizione
delle varianze…..
5)
Qualora sia necessario, moltiplicare l’incertezza
composta per un fattore, così da ottenere un’incertezza
globale, il fattore moltiplicativo deve essere indicato.
Parte I (introduzione)
Incertezze di tipo A e di tipo B
Un’incertezza tipo di categoria A è ottenuta
da una densità di probabilità derivata da
una distribuzione di frequenza osservata.
var(x)
ans =25.0570
sqrt(var(x))
ans =5.0057
La varianza stimata u2 sarà in questo caso la
varianza stimata statisticamente s2, lo scarto
tipo stimato u è dunque u=s.
vx=0;
>> for i=1:10000,
vx=vx+(x(i)-mean(x))^2;
end
>> vx=vx/9999
vx =25.0570
Parte I (introduzione)
Incertezze di tipo A e di tipo B
Un’incertezza tipo di categoria B è ottenuta
da una densità di probabilità ipotizzata sulla
base del grado di credenza del verificarsi di
un evento.
a
a
0.5/a
-a
a
1 2
1 1 3
σ2 =
x
dx
=
x =
∫
2⋅ a −a
2⋅ a 3 −a
1 1 3 3 a2 1
=
a +a = =
2⋅ a 3
3 3
[
]
La varianza stimata u2 sarà in questo caso
calcolata in base alle informazioni disponibili,
lo scarto tipo stimato u è u=σ
σ.
Parte I (introduzione)
Valutazione dell’incertezza tipo
Modello della misurazione
Un misurando Y viene in genere
determinato mediante altre N grandezze
X1,X2,…,Xn, utilizzando una relazione
funzionale f:
Y=f (X1,X2,…,Xn)
La funzione f potrebbe anche ridursi alla
funzione identità essere talmente complicata da
non essere esprimibile in forma analitica.
I valori delle grandezze X1,X2,…,Xn e le rispettive
incertezze possono provenire da misurazioni
dirette (cfr. Incertezza di categoria A), o possono
essere introdotte da fonti esterne (cfr. incertezze di
categoria B).
Parte I (introduzione)
Valutazione dell’incertezza tipo
Valutazione di categoria A dell’incertezza
tipo
Date n osservazioni Xi,k della grandezza d’ingresso Xi,
la migliore stima del valore atteso è la media
aritmetica o valore medio
1
Xi =
n
n
∑X
k =1
i ,k
La varianza sperimentale delle osservazioni è:
(
1 n
2
s (X i ) =
X i ,k − X i
∑
n − 1 k =1
)
2
N.B.: Se si utilizza nel modello della misurazione il
valore medio occorre utilizzare la stima della varianza
di tale valore:
2
(X i )
s
s2 X i =
n
( )
Tale quantità e la sua radice quadrata positiva
vengono spesso chiamati varianza di
categoria A-u2(xi) - e incertezza tipo di
categoria A - u(xi).
Parte I (introduzione)
Valutazione dell’incertezza tipo
Valutazione di categoria B dell’incertezza
tipo
Per grandezza d’ingresso Xi che non è stata stimata
mediante osservazioni ripetute, la varianza stimata
u2(xi) e l’incertezza tipo u(xi) devono essere valutate
per mezzo delle informazioni disponibili e ritenute
attendibili:
dati di misurazioni precedenti;
esperienza
o
conoscenza
generale
del
comportamento e delle proprietà dei materiali e
strumenti d’interesse;
specifiche tecniche del costruttore;
dati forniti in certificati di taratura o altri;
incertezze assegnate a valori di riferimento presi da
manuali
u2(xi) e u(xi), valutate in questo modo
vengono spesso chiamate varianza di
categoria B e incertezza tipo di categoria B.
Parte I (introduzione)
Valutazione dell’incertezza tipo
Un paio di osservazioni (e qualche esempio)
Una stima di categoria B dell’incertezza tipo può
risultare più attendibile di una stima di categoria A
della stessa incertezza. Ciò può accadere quando la
stima di categoria A è basata su un numero troppo
limitato di osservazioni indipendenti del misurando.
E’ possibile imbattersi in dichiarazioni di incertezza
che fanno riferimento a un fissato livello di fiducia. In
tale caso l’incertezza tipo può essere stimata soltanto
se si suppone nota anche la funzione di distribuzione
associata.
ESEMPIO 1: Un resistore campione ha un
valore di esistenza pari a 10,000742 Ω ± 129
µΩ, dove l’incertezza dichiarata individua un
intervallo di fiducia del 99 %’. Supponendo
che la distribuzione sia normale si può
assumere le l’incertezza tipo del resistore sia
u(Rs)=(129 µΩ)/2,58=50µΩ.
ESEMPIO 2: Abbiamo già visto che, nel caso
di una distribuzione rettangolare simmetrica
di semi-ampiezza a, la varianza vale
u2(xi)=a2/3.
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
L’incertezza tipo composta rappresenta lo
scarto tipo stimato associato con la stima del
risultato della misurazione y ed è indicato
con uc(y).
La relazione che lega l’incertezza tipo degli
ingressi u(xi) con l’incertezza tipo dell’uscita
uc(y) è data dalla legge di propagazione
dell’incertezza (da non confondere con la
‘legge di propagazione degli errori!).
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
Due
variabili
casuali
sono
statisticamente indipendenti o non
correlate
se
la
distribuzione
di
probabilità congiunta è uguale al
prodotto
delle
due
distribuzioni
marginali
L’incertezza tipo composta è la radice
quadrata
positiva
della
varianza
composta:
2
∂f 2
u (xi )
uc ( y ) = ∑
i =1 ∂xi
2
n
L’incertezza tipo composta caratterizza la
dispersione dei valori ragionevolmente
attribuibili al misurando Y.
Ciascuna u(xi)
è un’incertezza tipo
valutata come incertezza di categoria A
o come incertezza di categoria B.
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
Infatti….
Sviluppando in serie di Taylor la funzione f(.)
attorno ai valori attesi E(xi)=µi delle xi, e
trascurando i termini di ordine superiore, si ha:
y − µy =
u2c(y)
(y − µ )
2
y
u2(xi)
∂f
(xi − µ i )
∑
i =1 ∂xi
n
2
∂f
(xi − µ i ) =
= ∑
i =1 ∂xi
n
2
∂f
∂f ∂f
n −1
n
2
= ∑ (xi − µi ) + 2∑i =1 ∑ j =i +1
(xi − µi )(x j − µ j )
∂xi ∂x j
i =1 ∂xi
n
Il valore atteso dei quadrati degli
scostamenti rispetto ai valori medi indicati
sono proprio le varianze σy2 e σi2;
Il valore atteso E[ (xi − µ i )(x j − µ j )]del prodotto
misto è nullo per le ipotesi fatte.
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
La legge di propagazione dell’incertezza
può essere espressa come:
uc ( y ) =
2
n
2
n
2
[
(
)
]
(
)
c
⋅
u
x
=
u
y
∑ i i ∑ i
i =1
∂f
ci ≡
∂xi
i =1
ui ( y ) = ci u ( xi )
I termini ci (pari alle derivate parziali della
funzione f(.) rispetto alle variabili xi) vengono
detti coefficienti di sensibilità.
Essi descrivono come la stima dell’uscita y
varia al variare delle stime degli ingressi.
I coefficienti ci possono essere calcolati
anche sperimentalmente - senza ricorrere
alla conoscenza della funzione f(.). Si varia
una variabile xi di una quantità opportuna e
si misura la variazione prodotta sull’uscita y.
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
Se il modello della misurazione è del tipo:
Y = k X X .... X
p1
1
p2
2
pN
N
dove gli esponenti pi sono numeri noti con
incertezza trascurabile, allora l’incertezza
composta assume la forma:
[uc ( y ) / y ]
2
=
N
2
(
)
[
p
⋅
u
x
/
x
]
∑ i i i
i =1
Ovvero in questo caso è la varianza
relativa composta ad essere uguale alla
combinazione lineare delle varianze
relative stimate dei singoli ingressi.
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
ESEMPIO: si vuole calcolare la potenza a
radiofrequenza incidente su un resistore
campione (metodo bolometrico).
Esistono resistenze in grado di permettere
misure fino a frequenze dell’ordine di 70
GHz.
Infatti, in assenza e in presenza
dell’irraggiamento la resistenza si porterà
a due temperature diverse e quindi la
potenza assorbita varierà in modo
corrispondente.
V2
P=
; R = R (t ) = R0 (1 + α (t − t0 ))
R
V2
P' =
R'
∆P = P − P '
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
La
determinazione
dell’incertezza
composta richiede la determinazione dei
coefficienti ci:
∂P
2V
2P
=
=
c1 =
∂V
R 0 [1 + α (t − t 0 )]
V
∂P
P
= −
c2 =
∂R0
R0
∂P
P (t − t o )
c3 =
= −
[1 + α (t − t 0 )]
∂α
∂P
Pα
c4 =
= −
∂t
[1 + α (t − t 0 )]
17
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso non correlate
L’incertezza
composta
del
attribuito alla potenza sarà:
2
valore
∂P 2
∂P 2
∂P 2
∂P 2
2
u (Ro ) +
uc ( P ) =
u (V ) +
u (α ) + u (t ) =
∂V
∂α
∂t
∂Ro
2
2
2
= [c1u (V )] + [c2u (Ro )] + [c3u (α )] + [c4u (t )] =
2
2
2
= u12 (P ) + u 22 (P ) + u32 (P ) + u 42 (P ).
uc (∆P ) = uc2 (P ) + uc2 (P ').
2
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso correlate
L’incertezza tipo composta nel caso di
grandezze correlate (o dipendenti) è
ancora la radice quadrata positiva
della
varianza
composta,
questa
tuttavia assume la forma:
2
n −1
∂f 2
u (xi ) + 2 ∑
uc ( y ) = ∑
i =1 ∂xi
i =1
2
n
n
=∑
i =1
∂f ∂f
u (xi , x j ) =
∑
j =i +1∂xi ∂x j
n
∂f ∂f
u (xi , x j ).
∑
j =i ∂xi ∂x j
n
Infatti, in questo caso non è più lecito
supporre che sia nullo il valore della
covarianza tra le variabili xi e xj, ovvero il
valore E[ (xi − µ i )(x j − µ j ) ].
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso correlate
La covarianza associata alle variabili xi e
xj è un’espressione quantitativa della
loro dipendenza mutua ed è definita
come:
(
)(
)
cov(X i , X j ) = ∫∫ X i − µ X i X j − µ X j p (X i , X j )dX i dX j
La
covarianza
stimata
u(Xi,Xj)=u(Xj,Xi) si ottiene da n
coppie
indipendenti
di
osservazioni simultanee delle
due variabili come:
(
)(
1 n
u (xi , x j ) =
xik − x i x jk − x j
∑
n − 1 k =1
)
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso correlate
Si utilizza spesso
correlazione
r (xi , x j ) =
il
coefficiente
di
u (xi , x j )
u ( xi )u (x j )
Esso è compreso nell’intervallo [-1,1] ed è
nullo se le variabili sono indipendenti.
La legge di propagazione dell’incertezza
diventa allora:
uc ( y ) =
2
2
n
∑ [c ⋅ u(x )]
i
+ 2∑
∑ c c u(x )u (x )r (x , x )
n
i
j
Nel caso specialissimo in cui tutti
ingressi sono correlati con coefficiente
correlazione r(xi,xj)=±1 la legge
propagazione dell’incertezza assume
forma:
gli
di
di
la
i =1
i
n −1
i =1
j =i +1
i
j
i
j
∂f
uc ( y ) = ∑ [ci ⋅ u (xi )] = ∑ ⋅ u ( xi )
i =1
i =1 ∂xi
2
n
2
n
2
Parte I (introduzione)
Determinazione dell’incertezza tipo composta
Grandezze d’ingresso correlate
Anche per la covarianza è possibile
avere una valutazione di categoria A o
di categoria B.
A)
Se due variabili di ingresso Xi e Xj
vengono stimate calcolando le medie,
allora una stima di categoria A della
covarianza delle medie è:
1
u (xi , x j ) =
n(n − 1)
∑ (X
n
k =1
ik
)(
− X i X jk − X
j
)
B)
Se si utilizzano le informazioni
disponibili sulla variabilità correlata delle
grandezze di ingresso Xi e Xj si ottiene
usa stima di categoria B delle della
covarianza delle due variabili.
Parte I (introduzione)
Determinazione dell’incertezza estesa
L’incertezza tipo composta può essere
utilizzata universalmente per esprimere
l’incertezza di misura;
in talune applicazioni commerciali,
industriali e normative, e là dove sono
coinvolte la sicurezza e la salute pubblica,
è
sovente
necessario
dare
una
valutazione quantitativa dell’incertezza
che definisca un intervallo intorno al
risultato della misurazione che ci si aspetti
comprendere una gran parte della
distribuzione di valori che possono essere
ragionevolmente attribuiti al misurando.
Parte I (introduzione)
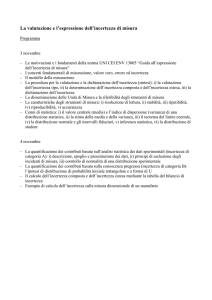
Determinazione dell’incertezza estesa
Se
consideriamo
una
distribuzione
gaussiana otteniamo che gli intervalli
scelti sono legati ai livelli di confidenza
secondo la figura riportata:
Se,
tuttavia
consideriamo
una
distribuzione rettangolare il livello di
confidenza associato all’intervallo [(µ−σ),(
µ+σ)] è pari a 1 / 3 = 0,577
Parte I (introduzione)
Determinazione dell’incertezza estesa
La valutazione quantitativa supplementare
dell’incertezza che fornisce un tale intervallo
è denominata incertezza estesa U.
L’incertezza estesa U viene ottenuta
moltiplicando l’incertezza tipo campione per
un fattore di copertura k
U =k ⋅uc ( y )
Il valore del fattore di copertura dipende
dalla porzione p della distribuzione di
probabilità che si vuole includere (ovvero
dalla probabilità p che il valore del
misurando cada in tale intervallo).
Il parametro p viene detto probabilità di
copertura o livello di fiducia.
In generale k è nel campo tra 2 e 3.
Parte I (introduzione)
Determinazione dell’incertezza estesa
Come
determinare
la
relazione tra il livello di fiducia
desiderato p e il fattore di
copertura k?
La norma descrive un metodo semplificato
per la determinazione del fattore di
copertura basato sulle seguenti osservazioni:
la stima di y è ricavata da stime delle
grandezze d’ingresso caratterizzate da
distribuzioni ben individuate;
le incertezze delle stime dei parametri
d’ingresso
contribuiscono
equamente
all’incertezza composta dell’uscita;
L’approssimazione, implicita nella legge di
propagazione dell’incertezza, è adeguata;
L’incertezza composta è piccola.
Parte I (introduzione)
Determinazione dell’incertezza estesa
In queste circostanze, grazie al
Teorema del limite centrale, si
può
ritenere
normale
la
distribuzione di probabilità che
caratterizza il risultato della
misurazione!
In questo caso, frequente nella pratica, si
può ritenere che k=2 fornisca un intervallo di
fiducia approssimativamente del 95 per
cento, k=3 fornisca un intervallo di fiducia
approssimativamente del 99 per cento;
L’ Appendice G della Norma UNI CEI 9
fornisce una guida completa al trattamento
dei casi ribelli.