COMPUTER VISION
Image Deblurring in the Presence of Salt-and-Pepper Noise
3
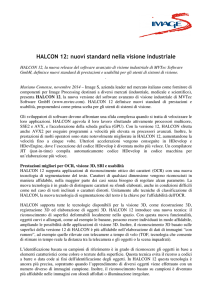
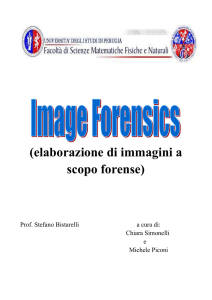
Fig. 2. The failure of the two-stage approach to salt-and-pepper noise removal and
image deblurring. Top-left: Blurred image. Top-right: Blurred image contaminated by
salt and pepper noise. Bottom-left: The outcome of 3 × 3 median filtering, followed by
deblurring. Bottom-right: The outcome of 5×5 median filtering, followed by deblurring.
Salt and pepper noise removal is considered in the literature by itself. It is
commonly approached using median-type filters, see e.g [9, 13, 18]. Recently, a
promising variational method for impulse denoising was proposed by [7, 16, 17].
In the absence of unified algorithms for deblurring and salt-and-pepper noise
removal, the straightforward approach is to first denoise the image, then to
deblur it. This two-stage method is however prone to failure, especially at high
noise density. Image denoising using median-type filtering creates distortion that
depends on the neighborhood size; this error can be strongly amplified by the
deblurring process, even in regularized methods. Consider the example shown
in Fig. 2. The top-left image is the 256 × 256 Einstein image, blurred using a
a cura di: Maurizio Falcone
Dipartimento di Matematica
Facoltà di Scienze Matematiche, Fisiche e Naturali
Università di Roma “La Sapienza”
Mostra “La Scienza Illumina”
28 Settembre -16 Ottobre 2015
Luce e visione artificiale
La luce è essenziale per vedere il mondo che ci circonda.
Ci permette di riconoscere gli oggetti, di muoverci nell’ambiente che ci circonda e di
cercare un oggetto/un viso/una persona in una scena.
Le tecniche di visione artificiale (computer vision) cercano di ricostruire questa capacità in modo che anche un robot provvisto di telecamere possa fare in modo automatico
quello che noi facciamo quotidianamente con i nostri occhi.
Per far questo, sono stati sviluppati alcuni modelli matematici della visione che
tengono conto delle proprietà di riflessione degli oggetti, delle condizioni di illuminazione
della scena (luce diffusa, luce direzionale, luce riflessa), della distanza e del tipo dei
sistemi di acquisizione delle immagini.
Negli ultimi 30 anni lo sviluppo di queste tecniche, l’alta definizione delle telecamere
e la possibilità di risolvere numericamente questi modelli hanno permesso di ottenere
soluzioni accurate per molti problemi della computer vision ed i robot hanno cominciato
a vedere/riconoscere/interpretare la realtà.
Oggi questi modelli sono alla base di molte applicazioni industriali.
Trattamento delle immagini
Nell’era della tecnologia digitale, siamo circondati ogni giorno da immagini, filmati,
messaggi multimediali: basti pensare che ognuno di noi possiede uno smartphone con
cui scatta foto, crea filmati che poi condivide in rete attraverso i vari social network.
Forse però pochi sanno che la matematica è uno strumento fondamentale nel trattamento
delle immagini e che, la maggior parte delle immagini che vediamo, sono state ripulite,
filtrate e corrette utilizzando software che si basano su strumenti matematici avanzati.
L’utilizzo della matematica nel campo del trattamento delle immagini, risale agli inizi
degli anni 0 90.
I metodi matematici del trattamento delle immagini si occupano principalmente dei
problemi di filtraggio, segmentazione e ricostruzione 3D e sono basati su tecniche variazionali o su equazioni alle derivate parziali nonlineari. Anche altri problemi sono stati
1
affrontati con tecniche simili, ad esempio il problema dell’ingrandimento (zoom) di un
particolare estratto da una immagine ed il problema del flusso ottico che consiste nel
calcolare il moto apparente di un oggetto che si muove in una sequenza di immagini.
La soluzione di questi problemi trova applicazione in molti campi che vanno dalla ricerca biomedica (ecografie, TAC, immagini da microscopio elettronico) a quella spaziale
(immagini da telescopio, rilevamenti satellitari).
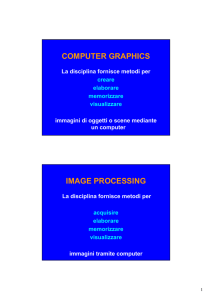
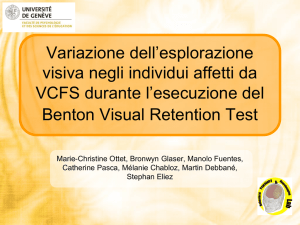
Filtraggio: ogni immagine è soggetta a delle perturbazioni legate al sistema di acquisizione (lenti sporche, problemi di trasmissione,..). Queste perturbazioni sono un
“rumore” che rovina la qualità dell’immagine ed il problema è quello di eliminare il
rumore senza perdere il contenuto dell’immagine.
Figura 1: Filtraggio: L’immagine di Lena col 70% di rumore (a), immagine filtrata con
vari tipi di modelli (b)–(k)
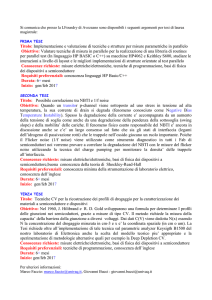
Segmentazione: viene utilizzata per individuare il bordo degli oggetti in una immagine. I bordi vengono caratterizzati da forti variazioni dei toni di grigio.
2
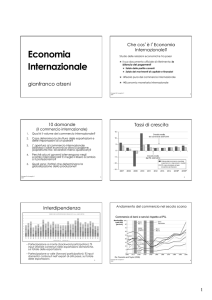
Shape-from-Shading (SFS) o ricostruzione 3D: date una o più immagini di un
oggetto si vuole ricostruire la sua forma.
Ulteriori approfondimenti
1. Sito del Gruppo di Ricerca Image Processing a UCLA (USA)
http://www.math.ucla.edu/ imagers/
2. La storia di Lena http://www.cs.cmu.edu/ chuck/lennapg/
3. T. Chan, L. Vese, Active contour and segmentation models using geometric PDE’s
for medical imaging, Geometric methods in bio-medical image processing, 63–75,
Math. Vis., Springer, Berlin, 2002.
4. B.K.P. Horn and M.J. Brooks, Shape from Shading, The MIT Press, 1989.
5. J.M. Morel, S. Solimini, Variational methods in image segmentation, Birkhäuser,
1995.
3