Dispense di
Macchine elettriche
Riordinate e rivedute da Giorgio Demurtas – www.ingdemurtas.it
Prefazione:
Vista la difficoltà nel trovare un libro adatto per prepararsi per l’esame mi sono
messo alla ricerca di materiale su cui studiare, oltre ai miei appunti. Ho trovato
diversi file (di cui non conosco gli autori) che ho corretto e integrato con altro
materiale. Troverete diversi errori, perlopiù di impaginazione e grammaticali.
Rendendo pubblico questo lavoro voglio rendermi utile agli studenti, così che tutti
possano superare l’esame con profitto e soddisfazione.
Il contenuto di questi documenti è fornito "così come è" (AS IS), a solo titolo
didattico e senza garanzia alcuna, implicita o esplicita. In particolare non ci si ritiene
responsabili di alcun danno diretto o indiretto causato dall'uso di queste informazioni.
Giorgio Demurtas
Copyright © 2006-2007, Giorgio Demurtas, Monserrato (CA), Italy (http://www.ingdemurtas.it)
Trasformatore
Il trasformatore ideale
Il trasformatore è una macchina elettrica statica, che è utilizzata per convertire energia
elettrica in energia elettrica (modifica di V, I, numero di fasi), tramite una conversione
intermedia dell'energia in energia elettromagnetica. Per effettuare l'analisi di tale quadripolo
elettrico (o doppio bipolo), partiamo dalla definizione classica di trasformatore che viene
dall'elettrotecnica. Come si osserva dalla figura, adottiamo per il bipolo in ingresso la
convenzione degli utilizzatori tensione e corrente sono orientati in modo tale che il bipolo
visto dall’ingresso risulti essere un carico) e per il bipolo in uscita quella dei generatori.
Questo ha anche un senso dal punto di vista fisico perché, essendo la macchina elettrica una
macchina che non può immagazzinare energia ma che la deve solo convertire, ci aspettiamo
che il flusso di energia avrà un verso che va dall’ingresso verso l’uscita. Questo però non
vieta che l’energia possa avere anche verso opposto, in questo caso le potenze avranno un
verso che risulta essere negativo (il dispositivo risulta essere perfettamente bidirezionale). Le
leggi che caratterizzano il trasformatore ideale sono:
v1 N 1
=
=n
v2 N 2
i1 1
=
i2 n
v1 n ⋅ v 2
v2
=
= n2 ⋅
i1 1 ⋅ i 2
i2
n
Il trasformatore ideale può convertire tensioni e correnti in qualunque forma essi si
presentino, continua o alternata.
Oltretutto si può osservare che, il legame che sussiste tra l’impedenza d’ingresso e
l’impedenza d’uscita, viste lato uscita del trasformatore, risulta essere esattamente pari ad n2.
Quindi le relazioni qui viste mettono subito in luce quali possono essere le possibili
utilizzazioni del trasformatore:
-
variatore di tensione e di corrente nel passaggio dal primario al secondario.
variatore di impedenze.
Nel campo delle correnti elevate, il trasformatore è principalmente utilizzato per variare i livelli
di tensione e corrente, invece nel campo delle correnti deboli viene principalmente utilizzato
come adattatore di impedenza (in elettronica). Si nota immediatamente che, grazie ai legami
funzionali, tra tensione in ingresso e tensione in uscita e tra corrente in ingresso e corrente in
uscita, il bilancio delle potenze istantanee in ingresso e in uscita risulta essere perfettamente
uguale. Quindi il trasformatore ideale, per definizione, è un sistema che converte tensioni e
correnti, facendo in modo che il flusso di potenza attraverso di lui risulti essere esattamente
invariato, quindi il componente non dissipa né potenza né energia.
1
vin iout
=
vin ⋅ iin = vout ⋅ iout
pin = pout
vout iin
Proviamo ora a delineare la struttura fisica che dovrebbe avere il trasformatore per possedere
le caratteristiche sopra descritte:
- Accoppiamento magnetico perfetto mediante l’utilizzo di un nucleo torroidale avente
permeabilità infinita ( µ = ∞ ) (in modo da convogliare tutte le linee di flusso).
- Gli avvolgimenti dovranno essere concentrici e distribuiti uniformemente su tutta la struttura
e le loro resistenze dovranno essere nulle (R=0).
- Il comportamento della struttura elettromagnetica dovrà essere lineare, per evitare la
presenza di fenomeni di isteresi magnetica.
Pertanto, realizziamo sul supporto torroidale di materiale indefinito, ma avente permeabilità
infinita, due avvolgimenti elettrici aventi un numero di spire pari a N 1 e N 2 .
Tenendo
conto
delle
precedentemente adottate:
convenzioni,
l’avvolgimento che assorbe energia, detto
avvolgimento primario è definito secondo la
convenzione
degli
utilizzatori
mentre
l'avvolgimento
che eroga energia, detto
avvolgimento secondario è definito secondo la
convenzione dei generatori.
Ipotizzo che l’avvolgimento costituito da N 1 spire
sia l’avvolgimento primario e in maniera del tutto
casuale, scelgo il verso della tensione V1 (ad
esempio come riportato nella figura accanto).
A questo punto, definito il verso della tensione di alimentazione, automaticamente conosco il
verso della corrente perché abbiamo detto che l’avvolgimento primario è definito secondo la
convenzione degli utilizzatori. Noto il senso di rotazione dell’avvolgimento, applicando la
regola della mano destra, determino quale risulta essere il verso del flusso.
Il flusso è l’elemento che mi accoppia l’avvolgimento primario all’avvolgimento secondario,
viene utilizzato come riferimento per definire la convenzione positiva relativa all’avvolgimento
secondario. Infatti noto il verso del flusso e il verso di rotazione dell’avvolgimento secondario,
applicando la regola della mano destra, determino quale risulta essere il verso positivo della
corrente i 2 che produce un flusso concorde a quello prodotto dall’avvolgimento primario. A
ciò corrisponde un coefficiente di mutuo accoppiamento positivo. Non sempre, però, si
riconosce il senso con cui sono avvolti gli avvolgimenti. Per questo motivo vengono
contrassegnati tramite un pallino i terminali del trasformatore, nei quali una corrente entrante
comporta un coefficiente di muto accoppiamento positivo (i flussi generati dalle due correnti
2
sono concordi). Ora si tratta di stabilire quali devono essere i versi delle tensioni, ma per
definire i versi positivi delle tensioni basta semplicemente applicare la legge di Kirchhoff.
A tal riguardo, le tensioni indotte e1 e e2 devono essere viste come dei generatori di tensione,
poiché la legge di lenz è definita secondo la convenzione dei generatori. In altre parole, per
essere rispettosi della legge di lenz, le tensioni indotte vanno prese con polarità concorde a
quello delle correnti. Quindi automaticamente abbiamo definito quelle che risultano essere le
convenzioni positive del nostro sistema.
Funzionamento a vuoto
φm
i2
i1
e1
v1
v2
e2
•
Analizziamo
il
funzionamento
del
trasformatore ideale a vuoto:
Alimentiamo il primario e ci assicuriamo che il
secondario sia a vuoto. Quando applichiamo
una tensione v1 in ingresso al primario, sulle
N 1 spire circolerà una corrente i1 , quindi
avremo una f .m.m. ( f .m.m. = N 1 ⋅ i1 ) che
produrrà un flusso φ che rimarrà vincolato
all'interno del supporto torroidale. Se esiste
una variazione di flusso esiste una tensione
indotta sia sul primario sia sul secondario, ma
affinché ciò accada è necessario che vi sia
una corrente circolante sull’avvolgimento
primario variabile e di conseguenza una
tensione di alimentazione variabile nel tempo.
I valori e i versi delle tensioni e1 ed e2 , se il sistema presenta un accoppiamento perfetto e
cioè se il flusso che si concatena con ciascuna spira dell’avvolgimento primario è uguale al
flusso che si concatena con ciascuna spira dell’avvolgimento secondario, sarà dato dalla
legge di Lenz. Perciò andiamo ad applicare la legge di Kirchhoff sull’avvolgimento primario e
sull’avvolgimento secondario del nostro trasformatore:
v1 + e1 = R1 ⋅ i1
e2 − v 2 = 0
poiché
R1 = 0
v1 + e1 = 0
e2 − v 2 = 0
v1 = −e1
v2 = e2
ma dalla legge di Lenz sappiamo che:
d (N1 ⋅φ)
dλ 1
=−
dt
dt
d (N 2 ⋅φ)
dλ 2
e2 = −
=−
dt
dt
e1 = −
dφ
+ N1
v1 − e1
dt = − N 1
=
=
v 2 e2 − N 2 dφ
N2
dt
perciò
dλ 1
dφ
= +N1
dt
dt
dλ 2
dφ
v2 = e2 = −
= −N 2
dt
dt
v1 = −e1 =
v1
N1
=−
v2
N2
3
Quindi questo vuol dire che al variare della tensione di alimentazione primaria, la tensione
indotta sul secondario varierà in maniera tale che il rapporto sia sempre lo stesso.
Condizione fondamentale perché si abbia una macchina elettromagnetica, che mi descriva
una relazione funzionale simile a quella del trasformatore ideale, è che sia sempre verificata
la legge di Faraday Lenz, cioè è necessario che il flusso vari nel tempo.
Funzionamento sotto carico
• Passiamo al funzionamento sottocarico
del trasformatore ideale:
Anche in questo caso la relazione che
lega la tensione in ingresso a quella di
uscita è la stessa, perché il tipo di
alimentazione al primario, il trasformatore
e le ipotesi di funzionamento sono le
stesse.
φm
i2
i1
e1
v1
v2
e2
Vediamo ora cosa succede per ciò che riguarda le correnti. In questo caso il flusso che si
concatena con l’avvolgimento primario e secondario è dovuto sia alla f .m.m. primaria
( f .m.m.1 = N 1 ⋅ i1 ) che secondaria ( f .m.m.2 = N 2 ⋅ i 2 ). Applichiamo la legge della circuitazione
magnetica (la circuitazione di H lungo una generica linea chiusa risulta essere pari alla
f .m.m. applicata) su una linea di flusso che si concatena sia con l'avvolgimento primario che
con il secondario:
∫ H ⋅ d l = N 1 ⋅ i1 + N 2 ⋅ i 2
γ
Il segno delle f .m.m. sono positive perché sono concordi con il flusso φ , cioè tutte e due
contribuiscono a produrre un flusso nella stessa direzione. Quindi per le ipotesi fatte in
precedenza, cioè permeabilità del supporto infinita e sistema fisico caratterizzato da una
sezione diversa da zero, il termine della circuitazione è nullo. Infatti essendo il flusso finito, ad
esso deve corrispondere un valore di induzione che è diverso da zero ( B ≠ 0 ), che è legato
ad H mediante la seguente relazione:
B = µ⋅H
Ma poiché µ = ∞ , affinché B sia finito, è necessario che il vettore d’intensità H = 0 . Quindi
avremo che:
N 1 ⋅ i1 + N 2 ⋅ i 2 = 0
⇒
N 1 ⋅ i1 = − N 2 ⋅ i 2
i1
N2
1
=−
=−
i2
N1
n
Quindi a prescindere dalla convenzione adottata, se i segni sono corretti, dovremo ottenere
che il flusso di potenza dall’ingresso all’uscita risulta essere invariato. Perciò andiamo a fare
4
un analisi energetica del nostro sistema, cioè verifichiamo che la potenza istantanea in
ingresso ( p1 = v1 ⋅ i1 ) risulti essere esattamente uguale alla potenza istantanea in uscita
( p 2 = v 2 ⋅ i 2 ):
p1 v1 ⋅ i1 N 1 N 2
=
= −
⋅−
=1
p2 v2 ⋅ i2 N 2 N 1
Poiché il rapporto tra le due potenze istantanee è uguale ad 1, il flusso di potenza rimane
invariato.
Da tale analisi abbiamo dimostrato che i supporti a permeabilità magnetica infinita sono dei
dispositivi che si prestano a realizzare il trasformatore ideale. Abbiamo ricavato che l'unica
differenza fra, modello del trasformatore ideale nella sua formazione elettrotecnica e il
modello ideale nella sua formulazione fisica, è data dalla presenza di segni negativi dovuti
proprio alla legge di Lenz.
5
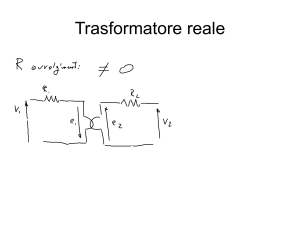
Il trasformatore reale linearizzato
Il trasformatore ideale si basa su una serie di ipotesi che non possono essere soddisfatte dai
sistemi fisici reali (circuito magnetico con permeabilità infinita, resistenza del circuito elettrico
nulla). Perciò andiamo ad introdurre per passi tutte quelle che invece sono le non linearità del
trasformatore, dandone una rappresentazione matematica e fisica che ci consenta di fornire
un modello di trasformatore che risulti essere più vicino al sistema fisico. Le prime condizioni
di idealità che è necessario eliminare sono proprio la presenza di un supporto magnetico
caratterizzato da permeabilità magnetica infinita e la presenza di avvolgimenti primari e
secondari caratterizzati da resistenza nulla. Vediamo quali sono gli effetti dell'eliminazione di
questi due ipotesi di idealità nel modello matematico del trasformatore, considerando per
semplicità ancora un sistema magnetico a comportamento lineare, cioè avente permeabilità
magnetica costante (la caratteristica magnetica del supporto è rappresentata graficamente
mediante una retta):
µ = tgα = cos t
Questo ragionamento viene fatto perché, in un sistema a comportamento lineare è valido il
principio di sovrapposizione degli effetti. Per poterci mettere nel caso che risulti essere il più
generale possibile, riteniamo che il valore della permeabilità magnetica del supporto risulti
essere confrontabile con l’aria. In particolare scegliamo un valore di permeabilità che sia di
poco superiore dell’aria. Notiamo che si sta parlando ancora di supporto e non di nucleo,
perché per il momento la funzione che svolge questo sistema è solo di sostegno agli
avvolgimenti, non sta ancora svolgendo alcuna funzione di convogliamento del flusso
visto che presenta permeabilità prossima a quella dell’aria.
Ipotesi:
φm
µ≠∞
µ ≅ µ0
i2
i1
φd1
v1
φd2
v2
R1 ≠ 0
R2 ≠ 0
Materiali con comportamento magnetico
lineare
6
Abbiamo definito con R1 e R 2 le resistenze dell'avvolgimento primario e secondario, prima di
analizzare il funzionamento del trasformatore analizziamo i parametri circuitali della macchina
Analisi dei parametri circuitali del trasformatore
Lasciamo aperto il secondario, mentre alimentiamo il sistema con una tensione v1 questa
comporta la circolazione di una corrente i10 nell'avvolgimento primario, caratterizzato da un
numero di spire N1 , a cui sarà associata una f .m.m. che produrrà una distribuzione di campo
magnetico B . Come possiamo capire, non essendoci una netta differenziazione delle
permeabilità magnetiche dei materiali, avremo che la distribuzione di campo nello spazio
circostante il trasformatore potrà essere la più generale possibile. Per tale ragione
introduciamo il concetto di flusso mediamente concatenato con ciascuna spira φ 1 :
N1
∑φi
φ1 =
i =1
N1
dove φi è il flusso concatenato con ciascuna spira.
Il flusso mediamente concatenato con ciascuna spira può essere scomposto in due termini:
• il flusso di mutua φm1 , cioè quel flusso prodotto dall'avvolgimento primario che
mediamente si concatena con tutte le spire dell’avvolgimento secondario.
• il flusso disperso φd 1 , cioè quel flusso che mediamente si concatena esclusivamente
con le spire dell'avvolgimento primario.
Possiamo immediatamente capire che del flusso complessivo prodotto dall'avvolgimento
primario, una parte, cioè il flusso di mutua mi realizza l'accoppiamento magnetico tra
l'avvolgimento primario e l'avvolgimento secondario mentre un'altra parte, cioè il flusso di
dispersione che si concatena esclusivamente con l'avvolgimento primario, per tale ragione
non può assolutamente partecipare nei fenomeni di scambio energetici fra primario e
secondario. Questo risulta essere un concetto importante perché ci consente di mettere in
evidenza che i due circuiti elettrici non sono completamente disgiunti, ma sono strettamente
interconnessi attraverso l’accoppiamento magnetico. Lo scopo è quello di fare in modo che il
flusso di mutua risulti essere prossimo al flusso totale, perché nelle condizioni di idealità, viste
precedentemente, il flusso di dispersione era esattamente uguale a zero.
ℜc1 =
lc1
1
lc1
= ⋅
µ ⋅ S µr µ 0 ⋅ S
Se si rappresenta la struttura del circuito
magnetico
semplificata
del
nostro
trasformatore tenendo conto della legge di
Ohm magnetica (vedi figura affianco), sotto
l’ipotesi di sezione e permeabilità magnetica
costante del supporto, si osserva che per
ridurre il flusso disperso φd 1 è necessario che
la riluttanza totale offerta dal nucleo magnetico
sia molto inferiore rispetto alla riluttanza del
7
percorso che viene seguito da quella quota di
flusso che si richiude in aria.
ℜ0 =
laria
µ0 ⋅ S
Infatti se consideriamo due tubi di flusso identici, uno attraverso il nucleo e l’altro in aria,
questi presentano un valore di riluttanza differente di un valore pari a
1
µr
:
Quanto più è elevata la permeabilità relativa µr del nucleo, tanto più piccolo risulta
essere il valore della riluttanza del nucleo rispetto alla riluttanza dell’aria ( a parità di
forza magnetomotrice applicata, la parte di flusso che circolerà nel gioco e nella
colonna sarà molto maggiore rispetto al quota di flusso che circolerà nel tratto in aria ).
Pertanto, affinché il flusso φ 1 venga canalizzato all’interno del supporto è necessario
che la differenza tra la permeabilità assoluta dell’aria e quella del nucleo sia elevata.
Vediamo adesso di definire numericamente i valori di queste quantità. Il flusso mediamente
concatenato con ciascuna spira dell'avvolgimento primario φ 1 si calcola mediante la legge di
Ohm magnetica:
N ⋅i = ℜ ⋅ φ
φ1 = Γ1 ⋅ N 1 ⋅ i1
dove Γ1 è la permeanza globale offerta al flusso φ 1
In generale però abbiamo sempre parlato di flusso concatenato con l'avvolgimento primario,
perciò:
λ1 = N 1 ⋅ φ 1 = N 1 ⋅ (Γg ⋅ N 1) ⋅ i1
λ1 = (Γg ⋅ N 12 ) ⋅ i1 = L1t ⋅ i1
dove L1t è detto coefficiente di autoinduzione totale primario, il quale risulta essere pari a:
L1t = Γg ⋅ N 1 2
Grazie all'ipotesi fatta precedentemente di sistema avente comportamento lineare, sia dal
punto di vista elettrico sia da un punto di vista magnetico, risulta essere sicuramente valido il
principio di sovrapposizione degli effetti. Perciò avremo che la somma del flusso di
dispersione e del flusso di mutua sarà pari al flusso mediamente concatenato con ciascuna
spira dall'avvolgimento primario:
φ 1 = φm1 + φd 1
Questa condizione è valida soltanto in condizioni di idealità, ovvero
solo se la permeabilità magnetica dei mezzi è costante.
Come si può immediatamente capire, l'unica grandezza che possiamo direttamente misurare
è il coefficiente di autoinduzione totale, perché questo è dato dal rapporto tra il flusso
concatenato con l'avvolgimento primario e la corrente circolante nell'avvolgimento stesso. Per
quanto riguarda le due quantità φm1 e φd 1 , questo sono più difficili da calcolare perché
dipendono da vari fattori costruttivi, dai materiali ecc. Per questa ragione si introducono dei
coefficienti che sono il coefficiente di dispersione parziale del circuito primario e il coefficiente
di dispersione parziale del circuito secondario. Questi due coefficienti sono di tipo costruttivo
e vengono determinati in sede di progettazione del trasformatore, per questo vengono forniti
dalla ditta costruttrice. Noti tali coefficienti è possibile determinare i flussi di dispersione:
8
λd 1 = N 1 ⋅ φd 1 = σ 1 ⋅ N 1 ⋅ φ 1
φd 1 = σ 1 ⋅ φ 1
λd 1 = σ 1 ⋅ L1t ⋅ i1 = ld 1 ⋅ i1
ld 1
è detto coefficiente di dispersione primaria, il quale risulta essere pari a:
ld 1 = σ 1 ⋅ L1t
Allo stesso modo, applicando il principio di sovrapposizione degli effetti, il flusso di mutua φm1
è pari a:
φm1 = φ 1 − φd 1 = φ 1 − σ 1 ⋅ φ 1
φm1 = (1 − σ 1) ⋅ φ 1
λm1 = N 1 ⋅ φm1 = (1 − σ 1) ⋅ N 1 ⋅ φ 1
λm1 = (1 − σ 1) ⋅ λ1 = (1 − σ 1) ⋅ L1t ⋅ i1
dove L1 rappresenta il coefficiente di autoinduzione principale, il quale risulta essere pari
a:
L1 = (1 − σ 1) ⋅ L1t
Queste definizioni sono state fatte esclusivamente per l'avvolgimento primario, ma come è
noto, nel sistema non è presente soltanto un effetto di autoinduzione, ma soprattutto è
presente un effetto di mutua induzione o di mutuo accoppiamento. Quindi andiamo a valutare
il flusso mutuamente accoppiato con il secondario:
λm 2 = N 2 ⋅ φm1 =
N2
N2
⋅ N 1 ⋅ φm1 =
⋅ λm1
N1
N1
λm 2 =
N2
⋅ L1 ⋅ i1 = M 21 ⋅ i1
N1
dove M 21 è il coefficiente di mutua induzione dell'avvolgimento secondario rispetto
all’avvolgimento primario, il quale è pari a:
M 21 =
N2
⋅ L1
N1
inoltre tenendo conto del fatto che il flusso mutuamente accoppiato con l'avvolgimento
primario risulta essere pari a:
λm1 = L1 ⋅ i1 = Γs ⋅ N 12 ⋅ i1
Sostituendo, nella formula del coefficiente di mutua induzione, dalla relazione L1 = Γs ⋅ N 1 2 si
ottiene che:
M 21 =
N2
N2
⋅ L1 =
⋅ Γs ⋅ N 12
N1
N1
M 21 = N 1 ⋅ N 2 ⋅ Γs
Adesso andiamo a verificare se nel trasformatore è valido il principio di reciprocità, cioè
supponiamo di alimentare l'avvolgimento secondario e di lasciare aperto l'avvolgimento
primario. In tal caso si nota che:
9
λ 2 = ( Γg ⋅ N 2 2 ) ⋅ i 2 = L 2 t ⋅ i 2
φ 2 = φm 2 + φd 2
L 2 t = Γg ⋅ N 2 2
λd 2 = σ 2 ⋅ L 2t ⋅ i 2 = ld 2 ⋅ i 2
ld 2 = σ 2 ⋅ L 2t
λm 2 = (1 − σ 2) ⋅ λ 2 = (1 − σ 2) ⋅ L 2t ⋅ i 2
L 2 = (1 − σ 2) ⋅ L 2t
N1
λm1 =
⋅ L 2 ⋅ i 2 = M 12 ⋅ i 2
N2
N1
M 12 =
⋅ L2
N2
λm1 = N 1 ⋅ φm 2 =
N1
N1
⋅ N 2 ⋅ φm 2 =
⋅ λm 2
N2
N2
Inoltre, tenendo conto che il flusso mutuamente accoppiato con l'avvolgimento secondario
risulta essere pari a:
λm 2 = L 2 ⋅ i 2 = Γs ⋅ N 2 2 ⋅ i 2
sostituendo nella formula del coefficiente di mutua induzione la relazione L 2 = Γs ⋅ N 2 2 , si
ottiene che:
M 12 =
N1
N1
⋅ L2 =
⋅ Γs ⋅ N 2 2
N2
N2
M 12 = N 1 ⋅ N 2 ⋅ Γs
Da tale studio si deduce che il principio reciprocità risulta essere verificato, inoltre si osserva
che i coefficienti di mutuo accoppiamento soddisfano la relazione seguente:
M 21 = M 12 = M = N 1 ⋅ N 2 ⋅ Γs
Prima di applicare le equazioni di Kirchhoff all'avvolgimento primario e all'avvolgimento
secondario, analizziamo le condizioni di accoppiamento perfetto (flusso dispersione = 0) nelle
condizioni di funzionamento a vuoto (dell'avvolgimento primario o dell'avvolgimento
secondario). In tale situazione si vede che:
φ1 =
φ 1 = φm1
λ1
N1
=
L1t
⋅ i1
N1
λm 2 = N 2 ⋅ φm1 ⇒ φm1 =
φ2 =
λm 2
N2
=
L 2t
⋅ i2
N2
λm1 = N 1 ⋅ φm 2 ⇒ φm 2 =
φ 2 = φm 2
M 21
φm1 =
⋅ i1
N2
L1t
M
⋅ i1 =
⋅ i1
N1
N2
λ2
N2
λm1
N1
M 12
φm 2 =
⋅ i2
N1
L 2t
M
⋅ i2 =
⋅ i2
N2
N1
Da queste ultime relazioni ricaviamo che, in condizioni di accoppiamento perfetto, i
coefficienti di autoinduzione totale dell'avvolgimento primario e dell'avvolgimento secondario
valgono:
L1t =
10
N1
⋅M
N2
L 2t =
N2
⋅M
N1
Perciò il coefficiente di mutuo accoppiamento M risulta essere pari a:
poiché
M = L1t ⋅ L 2t
N1 N 2
L1t ⋅ L 2t =
⋅
⋅M 2 = M 2
N 2 N1
Tale condizione di idealità non è mai rispettata poiché ogni volta che si ha permeabilità finita,
necessariamente una parte delle linee di flusso tenderà a concatenarsi con il solo circuito di
eccitazione. Per avvicinarsi alle condizioni reali si introduce il coefficiente di
accoppiamento α, la relazione precedente diviene la seguente:
M = α ⋅ L1t ⋅ L2t
Se ad esempio α=0.98 ciò significa che il flusso di mutua è il 98% del flusso totale, oppure
che il flusso disperso è il 2% di quello totale.
Un altro metodo per valutare il flusso disperso consiste nel definire il coefficienti
dispersione parziale σ dell'avvolgimento primario e dell'avvolgimento secondario, ottenuti
tramite il rapporto tra il flusso disperso è il flusso totale prodotto:
M
⋅ i1
N1 M
σ 1 = 1− N 2 = 1−
⋅
L1t
N 2 L1t
⋅ i1
N1
M
φm1 =
⋅ i1
N2
σ1 =
φd 1 φ 1 − φm1
φm1
=
= 1−
φ1
φ1
φ1
φ1 =
λ1
N1
=
L1t
⋅ i1
N1
M
L1t
M
⋅ i2
N2 M
σ 2 = 1− N1 = 1−
⋅
L 2t
N 1 L 2t
⋅ i2
N2
M
φm 2 =
⋅ i2
N1
σ2 =
σ 1 = 1− K ⋅
φd 2 φ 2 − φm 2
φm 2
=
=1−
φ2
φ2
φ2
φ2 =
λ2
N2
=
L 2t
⋅ i2
N2
σ 2 = 1−
1 M
⋅
K L 2t
Il quadrato del coefficiente di accoppiamento risulta essere pari a:
α 2 = (1 − σ 1) ⋅ (1 − σ 2)
e poiché σ 1 ≅ σ 2 , otteniamo che:
α = (1 − σ 1)
Noti i parametri che abbiamo precedentemente definito, andiamo ad applicare le equazioni di
Kirchhoff agli avvolgimenti del nostro trasformatore nel funzionamento a vuoto:
11
Funzionamento a vuoto del trasformatore
Alimentiamo il primario con una tensione v1 e lasciamo aperto il secondario della macchina,
in questo modo la corrente circolante sulle spire del secondo avvolgimento sarà nulla.
φm
i2
i1
e1
v1
e2
v1 + e1t = r1 ⋅ i10
e 2t = v 20
12
v2
Per indicare che siamo in condizioni di funzionamento a vuoto contrassegniamo sia
la corrente che circola sul primario che la tensione sul secondario con il pedice 0.
La tensione indotta totale sull’avvolgimento primario e1t risulta essere pari a:
e1t = −
dλ1
dφ 10
d L1t
= −N1 ⋅
= − N1 ⋅ ( ⋅ i10)
dt
dt
dt N 1
e1t = − L1t ⋅
d (i10)
dt
Ricordando che il flusso φ 1 è composto dalla somma di due termini:
ricaviamo che:
d
d (φm10)
d (φd10)
(φm10 + φd 10) = − N 1 ⋅
− N1⋅
= em10 + ed10
dt
dt
dt
d
d ld 1
e1t = − N 1 ⋅ ( L1 ⋅ i1) − N 1 ⋅ ( i1)
dt N 1
dt N 1
φ 10 = φm10 + φd 10
e1t = − N 1 ⋅
e1t = − L1 ⋅
d (i10 )
d (i10 )
− ld 1 ⋅
dt
dt
Per quanto riguarda la tensione indotta totale e2t , dovuta al fenomeno di mutua induzione,
sia ha che:
e 2t = −
d (λm 20)
d (φm10)
N2
d (i10)
= −N 2 ⋅
=−
⋅ L1 ⋅
dt
dt
N1
dt
e 2t = −
N2
d (i10)
d (i10)
⋅ L1 ⋅
= −M ⋅
N1
dt
dt
Perciò le equazioni di equilibrio dell'avvolgimento primario e dell'avvolgimento secondario
possono essere trascritte nel seguente modo:
v1 + e1t = r1 ⋅ i10
v1 + (em10 + ed 10) = r1 ⋅ i10
d (i10)
d (φm10)
+ N1⋅
dt
dt
d (i10)
d (i10)
+ L1 ⋅
2) v1 = r1 ⋅ i10 + ld 1 ⋅
dt
dt
d (i10)
− em10
3) v1 = r1 ⋅ i10 + ld 1 ⋅
dt
1) v1 = r1 ⋅ i10 + ld 1 ⋅
d (λm 2 )
d (φm10)
= −N 2 ⋅
dt
dt
N2
d (i10)
2) v 20 = e2t = − ⋅ L1 ⋅
N1
dt
d (i10)
3) v 20 = e2t = −M ⋅
dt
1) v 20 = e2t = −
e 2t = em 20 = v 20
Le relazioni che esprimono la tensione v1 , ci dicono che l'aliquota di flusso di dispersione
viene interpretata nel nostro modello, non più come una tensione indotta, ma bensì come
una caduta di tensione sull'induttanza di dispersione ld 1 , quindi un termine dissipativo.
Mentre poniamo in evidenza il fatto che è presente una tensione indotta dal flusso di
mutua φm10 che può essere espressa in tre modi differenti: nel primo caso mediante il flusso
φm10 , nel secondo caso evidenziando la sua dipendenza alla corrente i10 circolante a vuoto
e nel terzo caso si esprime esclusivamente l'espressione della tensione indotta di mutua
13
em10 . Anche la tensione v2 si può esprimere o in funzione del flusso di mutua φm10 oppure in
funzione della corrente circolante a vuoto i10
● Funzionamento sotto carico del trasformatore
Analizziamo il funzionamento a carico tenendo sempre presente che il supporto magnetico
ha un comportamento lineare e perciò è possibile applicare il principio di sovrapposizione
degli effetti. Applichiamo le equazioni di Kirchhoff hai due avvolgimenti:
v1 + e1t = r 1 ⋅ i1
e 2t = r 2 ⋅ i 2 + v 2
Le tensioni indotte e1t ed e2t risultano essere pari a:
e1t = − N 1 ⋅
d
(φ 1t )
dt
φ 1t = φ 1 + φm 2 = φd 1 + φm1 + φm 2 = φd 1 + φm
dove
d
e2t = − N 2 ⋅ (φ 2t )
dt
φ 2 t = φ 2 + φm1 = φd 1 + φm 2 + φm1 = φd 2 + φm
perciò:
d
d
d (φm)
d (φd1)
d (φd 1)
(φ 1 + φm 2) = − N 1 ⋅ (φm + φd 1) = − N 1 ⋅
− N1⋅
= em1 − N 1 ⋅
dt
dt
dt
dt
dt
d
d
d (φm)
d (φd 2)
d (φd 2)
e2t = − N 2 ⋅ (φ 2 + φm1) = − N 2 ⋅ (φm + φd 2) = − N 2 ⋅
− N2⋅
= em 2 − N 2 ⋅
dt
dt
dt
dt
dt
e1t = − N 1 ⋅
Ricordiamo che nelle condizioni di funzionamento a carico, il flusso di mutua φm risulta
essere pari a:
M
L1
(1 − σ 1) ⋅ L1t
⋅ i1
φm1 =
⋅ i1 =
⋅ i1 =
N2
N1
N1
φm = φm1 + φm 2
dove:
M
L2
(1 − σ 2) ⋅ L 2t
⋅ i2
φm 2 = ⋅ i 2 =
⋅ i2 =
N1
N2
N2
perciò:
N 1 ⋅ φm = N 1 ⋅ φm1 + N 1 ⋅ φm 2 = L1 ⋅ i1 + M ⋅ i 2
N 2 ⋅ φm = N 2 ⋅ φm1 + N 2 ⋅ φm 2 = M ⋅ i1 + L 2 ⋅ i 2
se i 2 = 0 (funzionamento a
vuoto) si ottiene che:
N1
= M ⋅K
N2
M = L1 ⋅ L 2
L1 = M ⋅
dove
N1
= M ⋅ K questa relazione era stata già ricavata, in modo diverso,
N2
precedentemente nel funzionamento a vuoto del trasformatore nell’ipotesi di
accoppiamento perfetto.
L1 = M ⋅
Tenendo conto delle relazioni precedenti e ricordando che:
14
L1t
⋅ i1
N1 N1
σ 1 ⋅ L1t
ld 1
φd 1 =
⋅ i1 =
⋅ i1
N1
N1
φ1 =
λ1
=
L 2t
⋅ i2
N2 N2
σ 2 ⋅ L 2t
ld 2
λd 2 =
⋅ i2 =
⋅ i2
N2
N2
φ2 =
λ2
=
è possibile sviluppare le relazioni sulle tensioni indotte e1t ed e2t nel seguente modo:
e1t = − N 1 ⋅
d
d L1t
d M
d (i1)
d (i 2)
(φ 1 + φm 2) = − N 1 ⋅ ( ⋅ i1) − N 1 ⋅ ⋅ i 2 = − L1t ⋅
−M ⋅
dt
dt N 1
dt N 1
dt
dt
e 2t = − N 2 ⋅
d
d L 2t
d M
d (i 2)
d (i1)
(φ 2 + φm1) = − N 2 ⋅ ( ⋅ i 2) − N 2 ⋅
⋅ i1 = − L 2t ⋅
−M ⋅
dt
dt N 2
dt N 2
dt
dt
d (φm)
d (φd 1)
d (φm1)
d (φm 2)
d (φd 1)
− N1⋅
= −N1 ⋅
− N1⋅
− N1 ⋅
=
dt
dt
dt
dt
dt
d (1 − σ 1) ⋅ L1t
d M
d σ 1 ⋅ L1t
= −N1 ⋅
⋅ i1 − N 1 ⋅ ⋅ i 2 − N 1 ⋅
⋅ i1 =
dt
N1
dt
N
1
dt
N1
d
d
d
d
d
d
= −[(1 − σ 1) ⋅ L1t ]⋅ (i1) − (σ 1 ⋅ L1t ) ⋅ (i1) − M ⋅ (i 2 ) = − L1 ⋅ (i1) − ld 1 ⋅ (i1) − M ⋅ (i 2 )
dt
dt
dt
dt
dt
dt
e1t = − N 1 ⋅
d (φm)
d (φd 2)
d (φm1)
d (φm 2)
d (φd 2)
− N2⋅
= −N 2 ⋅
− N2⋅
− N2⋅
=
dt
dt
dt
dt
dt
d (1 − σ 2 ) ⋅ L 2t
d M
d σ 2 ⋅ L2t
= −N 2 ⋅
⋅ i2 − N 2 ⋅
⋅ i1 − N 2 ⋅
⋅ i2 =
dt
N2
dt
N
2
dt
N2
d
d
d
d
d
d
= −[(1 − σ 2 ) ⋅ L 2t ]⋅ (i 2 ) − (σ 2 ⋅ L 2t ) ⋅ (i 2 ) − M ⋅ (i1) = − L2 ⋅ (i 2 ) − ld 2 ⋅ (i 2 ) − M ⋅ (i1)
dt
dt
dt
dt
dt
dt
e 2t = − N 2 ⋅
N.B. nella realtà gli unici coefficienti che si possono misurare sono i coefficienti di
autoinduzione totale L1t e L2t .
Osserviamo che entrambe le due tensioni indotte primarie e secondarie vengono
scomposte in due termini:
- uno associato al flusso di mutua, a cui deriva il trasferimento di energia tra i due
avvolgimenti
del trasformatore.
- uno associato al flusso di dispersione che non interviene nel trasferimento di energia.
Dalle relazioni sviluppate precedentemente è possibile riscrivere le due equazioni di
Kirchhoff nel modo seguente:
v1 + e1t = r1 ⋅ i1
d (i1)
d (i1)
d (i 2 )
d (i1)
d
N2
v1 = r1 ⋅ i1 + L1d ⋅
+ L1 ⋅
+M ⋅
= r1 ⋅ i1 + l 1d ⋅
+ L1 ⋅ (i1 +
⋅ i 2)
dt
dt
dt
dt
dt
N1
e2t = e2 m + e2 d = r 2 ⋅ i 2 + v 2
d (i 2 )
d (i1)
N2
d (i 2 )
d (i1)
d
N2
e2m = − L2 ⋅
−M ⋅
=−
⋅M ⋅
−M ⋅
= − M ⋅ (i1 +
⋅ i 2) =
dt
dt
N1
dt
dt
dt
N1
d (i 2 )
= r 2 ⋅ i 2 + l 2d ⋅
+ v2
dt
15
Fino ad adesso abbiamo dato per scontato che la relazione che lega le correnti con i flussi
fosse di tipo lineare e non abbiamo ancora visionato ciò che accade nel circuito magnetico.
Effettuando questa analisi, si può dedurre un equazione che ci è utile per spiegare il
perché di quella comunanza di termini sia nell’equazione di equilibrio elettrico al primario
N2
sia nell’equazione di equilibrio elettrico al secondario i1 +
⋅ i2 .
N1
Per analizzare il sistema magnetico utilizziamo l’equazione di circuitazione del campo
magnetico:
∫ H ⋅ dl = N 1 ⋅ i1 + N 2 ⋅ i 2
In questo caso non possiamo più dire che la caduta di tensione magnetica è nulla, perché
il sistema fisico ha una permeabilità magnetica µ ≠ ∞ . Partiamo dalle espressioni
canoniche riferite alla colonna, poiché su di essa sono avvolti sia l’avvolgimento primario
che l’avvolgimento secondario:
B c = µ ⋅ Hc
φm
Hc =
φm = Bc ⋅ Sc
Sc ⋅ µ
Riferito il flusso di mutua al flusso circolante in colonna, è immediatamente noto anche il
valore di Hc . Perciò scegliamo un tubo di flusso, in cui φm risulti essere costante e
applichiamo la legge della circuitazione magnetica:
φm ⋅ ∫
dl
= N 1 ⋅ i1 + N 2 ⋅ i 2
Sc ⋅ µ
φm ⋅ ℜ = N 1 ⋅ i1 + N 2 ⋅ i 2
φm = Γ ⋅ (N 1 ⋅ i1 + N 2 ⋅ i 2 )
dove ℜ = riluttanza magnetica del tubo di flusso, mentre Γ = permeanza magnetica
Tenendo conto che
seguenti modi:
1) caso:
φm = Γ ⋅
Γ ⋅ N1 ⋅ N 2 = M
Γ⋅ N2 = L
: il flusso φm = Γ ⋅ (N 1 ⋅ i1 + N 2 ⋅ i 2 ) può essere espresso nei due
N1
N1⋅ N 2
1
⋅ (N 1 ⋅ i1 + N 2 ⋅ i 2 ) = Γ ⋅ N 1 ⋅ i1 + Γ ⋅
⋅ i2 =
⋅ Γ ⋅ N 2 1 ⋅ i1 + (Γ ⋅ N 1 ⋅ N 2 )⋅ i 2 =
N1
N1
N1
[(
]
)
1
(L1 ⋅ i1 + M ⋅ i 2 )
N1
N2
N1⋅ N 2
1
φm = Γ ⋅
⋅ (N 1 ⋅ i1 + N 2 ⋅ i 2 ) = Γ ⋅
⋅ i1 + Γ ⋅ N 2 ⋅ i 2 =
⋅ (Γ ⋅ N 1 ⋅ N 2 ) ⋅ i1 + Γ ⋅ N 2 2 ⋅ i 2 =
N2
N2
N2
1
(M ⋅ i1 + L2 ⋅ i 2 )
=
N2
=
2) caso:
[
(
) ]
Pertanto il funzionamento del trasformatore a carico è caratterizzato dal seguente sistema
finale:
d (i1)
d
N2
d (i1)
+ L1 ⋅ (i1 +
⋅ i 2 ) = r 1 ⋅ i1 + l 1d ⋅
− e1m
dt
dt
N1
dt
d
N2
d (i 2 )
e 2 m = − M ⋅ (i1 +
⋅ i 2) = r 2 ⋅ i 2 + l 2 d ⋅
+ v2
dt
N1
dt
N2
φm = Γ ⋅ (N 1 ⋅ i1 + N 2 ⋅ i 2 ) = N 1 ⋅ Γ ⋅ i1 +
⋅ i2
N1
v1 = r1 ⋅ i1 + l 1d ⋅
16
Dove si indica con i1µ = i1 +
N2
⋅ i2
N1
la corrente magnetizzante pari alla somma della corrente
circolante al primario e di quella al secondario riportata al primario.
Tale corrente è una corrente fittizia che, circolando sull'avvolgimento primario nelle N1
spire, produce una forza magnetomotrice che risulta essere uguale alla forza
magnetomotrice complessivamente prodotta dall'avvolgimento primario e dall'avvolgimento
secondario (il flusso di mutua è associato alla corrente magnetizzante i1µ ), dato che:
φm = L1 ⋅
d
N2
d
N2
(i1 +
⋅ i 2) = M ⋅ (i1 +
⋅ i 2)
dt
N1
dt
N1
RIPORTO DELLE GRANDEZZE ELETTRICHE
Un operazione interessante da fare è quella di rendere il nostro modello congruente, cioè
cercare di trasformare il modello del trasformatore in modo da riferire tutte le grandezze
elettriche allo stesso sistema elettrico. Per fare questo sarebbe interessante trasformare le
equazioni dell’avvolgimento secondario in equazioni equivalenti sull’avvolgimento primario,
o in altre parole, mediante una operazione di riporto potrei studiare il sistema elettrico su
un unico livello di tensione e valutare gli effetti sul secondario in maniera equivalente al
primario (il tutto mi consente di visualizzare meglio le cadute di tensione, gli effetti
dissipativi e gli effetti percentuali rispetto al mio sistema di riferimento).
Per riportare le grandezze del secondario al primario l’operazione è semplice poiché
abbiamo già un modello che ci definisce i legami funzionali tra il primario e il secondario,
che è quello indicato dalle equazioni del trasformatore ideale, quindi basterà trasformare le
tensioni in modo tale che sia rispettato questo legame funzionale.
Per quanto riguarda le impedenze, possiamo riportarle da un sistema elettrico ad un altro
variandone il valore in maniera tale che le potenze attive e le potenze reattive, risultino
invariate nel passaggio da un sistema di riferimento all’altro. Ad esempio facendo
riferimento ad una resistenza, per portarla dall’avvolgimento secondario all’avvolgimento
primario, è sufficiente trovare il valore di resistenza secondaria che sottoposta alla
circolazione della corrente secondaria riportata al primario elevata al quadrato, mi dia le
stesse perdite.
i1
N2
1
=−
=−
i2
N1
K
v1
N1
=−
= −K
v2
N2
p 2cu = R 2 ⋅ i 2 2 = R 2 ' ⋅ i 2 '
2
R 2 ' ⋅ i2'2 = R 2 ' ⋅
i22
R2'
⇒
R
2=
K2
K2
Basandosi su queste operazioni che mi riportano le grandezze del secondario al primario,
vediamo cosa succede alle equazioni di equilibrio elettrico:
di1
d
+ L1 i1µ
v1 = r1i1 + L1d
dt
dt
di2
d
+ v2
− M i1µ = r2i2 + L2 d
dt
dt
N2
φmℜ
i1µ = i1 + N i2 = N
1
1
17
Perciò moltiplichiamo per K , primo e secondo membro, l’equazione di equilibrio elettrico.
Moltiplicando il coefficiente di mutuo accoppiamento per k, lo trasformiamo nel coefficiente
di autoinduzione L1.
di1
d
v1 = r1i1 + L1d dt + L1 dt i1µ
di2
d
− k ⋅ v2
L1 i1µ = −k ⋅ r2 i2 − k ⋅ L2 d
dt
dt
1
i1µ = i1 + k i2
Facciamo la stessa operazione di trasformazione anche sul secondario .
Applicando le relazioni di riporto che sono state dedotte precedentemente si ricava che al
posto di i2/k posso sostituire i’2.
i2 = −k ⋅ i2′
1
v2 = − v2′
k
k 2 r2 = r2′
Quindi sostituisco il valore di i2 nelle seguenti equazioni:
di1
d
v1 = r1i1 + L1d dt + L1 dt i1µ
di2
d
− k ⋅ v2
L1 i1µ = −k ⋅ r2 i 2 − k ⋅ L2 d
dt
dt
1
i1µ = i1 + k i 2
E ottengo:
di1
d
v1 = r1i1 + L1d dt + L1 dt i1µ
di 2′
d
2
2
+ v ′2
L1 i1µ = k ⋅ r2 i2′ + k ⋅ L2 d
dt
dt
i1µ = i1 − i 2′
Ora è facile capire che al posto di k2 L2d avrò il coefficiente di autoinduzione secondario
1
riportato al primario e al posto di k2 r2 avrò il valore di r2' . La quantità i2 risulta essere
k
proprio uguale a − i2′ . In finale abbiamo tutte equazioni di equilibrio elettrico al primario, e le
equazioni di equilibrio elettrico in cui tutti i parametri presenti nel circuito sono tutti riportati
al primario e in più abbiamo che la corrente i1µ = i1 − i2′ .
di1
d
v1 = r1i1 + L1d dt + L1 dt i1µ
di 2′
d
+ v ′2
L1 i1µ = r2′i 2′ + L2′ d
dt
dt
i1µ = i1 − i2′
18
Questo è il sistema elettrico trasformatorico. A questo punto sulla base di queste equazioni
posso andare a tracciare il circuito equivalente. La prima è l’equazione di equilibrio
elettrico al primario che mi dice che la somma delle tensioni applicate sulla resistenza r1,
sull’induttanza di dispersione e sull’induttanza primaria risultano essere uguali a v1.
L’equazione di equilibrio elettrico secondaria mi dice che la tensione indotta sull’elemento
d
L1 , mi equilibra la caduta di tensione r2' , più l’induttanza di dispersione riportata al
dt
primario, più la tensione v2 riportata al primario. Le correnti i1 ,i2′ devono essere tali che la
loro somma mi dia la corrente iµ (legge al nodo del circuito). Abbiamo delineato quello che
risulta essere il circuito equivalente al primario del trasformatore lineare .
La stessa operazione avremo potuto svolgerla riportando le grandezze al secondario,
ottenendo la seguente struttura: (La differenza è che le grandezze al primario vengono
riportate al secondario)
Questa risulta essere la rappresentazione del nostro trasformatore.
Questa rappresentazione può essere ulteriormente semplificata, invece che inserendo dei
coefficienti di autoinduzione di dispersione Ld1 e Ld2 , introducendo i coefficienti di
dispersione σ 1 e σ 2 , a questo punto i valori avrebbero assunto la forma :
19
Questo è uno studio di modellistica di base dei trasformatori, e questa è un operazione di
rappresentazione circuitale che viene generalmente adottata nello studio dei
trasformatori lineari.
Ha validità generale, quindi può essere utilizzata sia per trasformatori alimentati ad onda
sinusoidale, sia per applicazioni elettroniche.
Su questa modellizzazione di base andremo ad individuare le condizioni al contorno che ci
definiscono le condizioni costruttive per far si che il flusso di potenza attiva e reattiva, al
primario e al secondario, risulti essere il più vicino all’unità. Quindi cercheremo di
avvicinare il modello reale al modello ideale.
I2
jω ⋅ M
=−
z d 1 + z u + jω ⋅ L 2
I1
I2
jω ⋅ M
N1 ⋅ N 2 ⋅ Γ
N1
≅−
=−
=−
jω ⋅ L 2
N2
N 22⋅Γ
I1
Analisi in regime sinusoidale permanente
Finora abbiamo analizzato il modello matematico del trasformatore lineare, partendo dal
trasformatore ideale ed inserendo successivamente le cause di non idealità (effetti delle
resistenze, supporto contenente gli avvolgimenti non perfettamente impermeabile). In base
a queste considerazioni abbiamo ottenuto un modello basato su tre equazioni: due di
equilibrio elettrico (dalle leggi di Kirchoff) ed una basata sulla legge di circuitazione del
campo magnetico. Le tre equazioni poste a sistema, sono congruenti perché le grandezze
espresse sono riferite o tutte al primario o tutte al secondario. Abbiamo utilizzato questo
modello per scorporare tutti gli elementi che definiscono il comportamento della macchina
elettrica.
In particolare abbiamo scomposto la tensione indotta dal flusso concatenato con
l’avvolgimento primario e con l’avvolgimento secondario in due aliquote, una relativa ai
flussi di dispersione ed una relativa al flusso di mutuo accoppiamento. Lo scopo è stato
quello di evidenziare l’elemento di mutuo accoppiamento tra avvolgimento primario e
secondario
Abbiamo ottenuto una rappresentazione del trasformatore tramite dei valori istantanei,
mentre noi studieremo il trasformatore in regime sinusoidale permanente, dobbiamo quindi
passare alla rappresentazione in notazione simbolica. Le grandezze sinusoidali possono
essere espresse in forma complessa applicando le notazioni complesse agli operatori di
derivazione si ottiene che la derivata di i1 rispetto al tempo è uguale a jω moltiplicato per
l’operatore vettoriale che rappresenta la corrente i1.
Posso esprimere l’equazione di equilibrio primario in diverse forme equivalenti tra loro:
20
V1 = (R1 + jωL1d )I1 + jωL1 I1
V1 = (R1 + jωL1d )I1 + jωN1φ1
V1 = z&1d I1 − E1
Sull’avvolgimento primario, la tensione applicata è uguale alla caduta di tensione
sull’impedenza di dispersione più la tensione indotta dal flusso di mutua. Il flusso di
dispersione è incorporato come caduta di tensione nell’impedenza di dispersione. Quindi il
flusso concatenato con l’avvolgimento primario è visto un po’ come caduta di tensione e un
po’ come tensione indotta.
Si possono fare le stesse considerazioni nell’equazione di equilibrio secondario:
jωL1 I1µ = (R2' + jωL'2 d )I 2' + V2'
jωL1 I1µ = z& 2 d I 2' + V2'
La tensione indotta sull’avvolgimento secondario è la somma della caduta di tensione
sull’impedenza di dispersione e la tensione applicata al carico (quindi la tensione in uscita).
Per la legge di circuitazione avremo:
I1µ = I1 − I 2'
Su questo modello dovremo analizzare le diverse condizioni di funzionamento (lineari) del
trasformatore:
funzionamento a vuoto
funzionamento sotto carico
funzionamento in cortocircuito
Funzionamento a vuoto
Sul circuito secondario non circola corrente, mentre nel primario circola la stessa corrente
che passa nell’induttanza di magnetizzazione. In queste condizioni, il trasformatore viene
alimentato per magnetizzare esclusivamente la macchina.
Qualora la tensione di alimentazione v1 sia sinusoidale, le equazioni di Kirchhoff
precedentemente ricavate, sfruttando il metodo dei fattori, diventano:
V 1 = (r1 + jω ⋅ ld 1) ⋅ I 10 + jω ⋅ N 1 ⋅ Φm10
V 1 = (r1 + jω ⋅ ld 1) ⋅ I 10 + jω ⋅ L1 ⋅ I 10
V 1 = (r1 + jω ⋅ ld 1)⋅ I 10 − Em10
V 20 = − jω ⋅
N2
L1 ⋅ I 10
N1
Φm 0 = Γs ⋅ N 1 ⋅ I 10
V 20 = − jω ⋅ M ⋅ I 10
21
V 20 = − jω ⋅ N 2 ⋅ Φm10 = Em 20
Dove la quantità Z& 1d = (r1 + jω ⋅ ld 1) rappresenta l'impedenza di dispersione primaria
Ora calcoliamo il rapporto tra le tensioni indotte Em10 ed Em 20 :
Em10 − jω ⋅ N 1 ⋅ Φm 0 N 1
=
=
=m
Em 20 − jω ⋅ N 2 ⋅ Φm 0 N 2
Osserviamo che nel funzionamento a vuoto a regime sinusoidale permanente, il rapporto
tra le tensioni indotte, che prende il nome di rapporto spira m, è pari al rapporto fra il
numero di spire primarie e secondarie e inoltre Em10 ed Em 20 risultano essere in fase tra
loro. Andiamo invece ad analizzare il rapporto tra la tensione primaria di alimentazione e la
tensione secondaria:
V 1 ( r1 + jω ⋅ ld 1)⋅ I 10 − Em10
(r1 + jω ⋅ ld 1)⋅ I 10 N 1
=
=−
−
N2
V 20
Em10
jω ⋅ N 2 ⋅ Φm 0
Come si può notare tale rapporto, che prende il nome rapporto di trasformazione K, è
strettamente legato al valore dell'impedenza di dispersione primaria e solo se questa
risulta essere trascurabile rispetto alla tensione di alimentazione, potremmo considerare
tale rapporto pari al rapporto spire m.
K=
V1
N1
≅−
= −m
N2
V 20
Possiamo anche notare che per le convenzioni adottate, la tensione primaria e la tensione
secondaria sono in opposizione di fase.
Vogliamo ora tracciare il diagramma vettoriale delle grandezze elettriche che
caratterizzano il trasformatore nel funzionamento a vuoto, note la resistenza, l'induttanza di
dispersione, l’induttanza principale primaria, il numero di spire N1 e N 2 , la permeanza
dell'intero circuito, quando la tensione di alimentazione V 1 è di tipo sinusoidale. Scegliamo
il vettore rappresentativo della tensione di alimentazione come vettore di riferimento e lo
disponiamo sull’asse reale. Prendiamo in esame le equazioni di equilibrio elettrico al
primario è al secondario che avevamo precedentemente ricavato:
V 1 = (r1 + jω ⋅ ld 1)⋅ I 10 − Em10
N2
V 20 = − jω ⋅
L1 ⋅ I 10
N1
Φm 0 = Γs ⋅ N 1 ⋅ I 10
V 1 = (r1 + jω ⋅ ld 1) ⋅ I 10 + jω ⋅ L1 ⋅ I 10
V 20 = − jω ⋅ M ⋅ I 10
Noti tutti i parametrici circuitali, è possibile ricavare dalla prima equazione la corrente a
vuoto I 10 in modulo e fase. Sono quindi note le cadute di tensione sulla r 1, ld 1, L1 e tenendo
conto della relazione Φm 0 = Γs ⋅ N 1 ⋅ I 10 , si osserva che il flusso di mutua è in fase con la
corrente a vuoto. Infine dalla seconda relazione è possibile ricavare la tensione sul
secondario che è in quadratura in ritardo rispetto alla corrente I 10 .
La I 10 coinciderà con la I1µ . La tensione indotta, in queste condizioni prende il nome di
tensione indotta a vuoto E10, la tensione in uscita è la tensione a vuoto E20.
Oppure, sempre consideriamo la tensione come riferimento (disponiamo il suo vettore
simbolico sull’asse reale del piano di Laplace) e ipotizziamo di conoscere il valore della
22
corrente magnetizzante I1µ , la resistenza R1 e l’induttanza di dispersione l1d , possiamo
ricavare dalle equazioni di equilibrio elettrico la tensione E10:
V1 = (R1 + jωL1d )I1µ − E10
La caduta di tensione su R1 è in fase con la corrente magnetizzante e la caduta di tensione
sull’induttanza di dispersione l1d è in quadratura e in anticipo rispetto alla corrente
magnetizzante (Il vettore che completa il diagramma è proprio E10):
Nota E10 ed il rapporto di trasformazione K , è possibile ricavare la tensione indotta E20:
Noto E20 ed E1 possiamo ricavare il flusso che sarà in fase con la corrente magnetizzante.
V20 = E20 = − jωN 2φm 0
Siamo sicuri che tutte le grandezze hanno andamento sinusoidale e isofrequenziale,
perché il funzionamento del trasformatore è lineare.
23
Funzionamento sotto carico
Si parte dalle equazioni di equilibrio: generalmente la tensione di alimentazione V1 è un
parametro dato, come gli altri parametri del trasformatore (R1, l1d, R2, l2d, l1, K ) ed il valore
del carico Ru (e quindi il valore della V2). In queste condizioni, avremo tre equazioni e tre
incognite (le tre correnti):
V1 = z&1d I1 + jωL1 I µ
jωL1 I µ = z&2' d I 2' + V2'
I µ + I 2' = I1
Possiamo ricavare il diagramma vettoriale:
Disponiamo la tensione V1 sull’asse reale del piano di Laplace. Ricavata la I1 (modulo e
fase) dalla risoluzione del sistema 3*3 e note R1 e l’induttanza di dispersione l1d, ricaviamo
la caduta di tensione sulla resistenza (in fase con I1) e la caduta di tensione sull’induttanza
di dispersione l1d (in anticipo di 90 con I1°); è nota quindi la caduta di tensione
sull’impedenza di dispersione primaria.
Applicando l’equazione di equilibrio elettrico al primario:
V1 = z&1d I1 + jωL1 I µ
è noto il vettore -E1, dal quale possiamo ricavare il flusso Фm e successivamente I1µ (in
fase con Фm):
− E1 = jωL1 I µ = jωN1φ m
Noto I1 e I1µ possiamo ricavare I21 (corrente secondaria riportata al primario):
I1 = I µ + I 2'
Dall’equazione di equilibrio sul secondario, noto I21, possiamo ricavare la caduta di
tensione sull’impedenza di dispersione secondaria come somma della caduta di tensione
sulla resistenza e sull’induttanza di dispersione:
24
jωL1 I µ = z&2' d I 2' + V2'
Infine si può determinare il valore di V21 tensione secondaria riportata al primario.
Studio dei flussi di potenza nel trasformatore
Nel trasformatore ideale il rapporto V1/V2 è costante (n), riportando la tensione secondaria
al primario, il rapporto di questa con la tensione al primario è uguale a 1; questa
condizione è valida in modulo e fase e dovremmo quindi ottenere in regime sinusoidale
permanente un vettore V1 e un vettore V21 uguali in modulo e fase, mentre ciò non risulta
dal diagramma vettoriale del trasformatore reale di tipo lineare.
Infatti, a causa dell’impedenza di dispersione primaria e secondaria i vettori V1 e V21 sono
diversi sia in modulo che in fase (si ha una caduta di tensione nell’impedenza di
dispersione).
Inoltre abbiamo dei fenomeni dissipativi dovuti alla circolazione di corrente su R1 e R2
(potenza attiva assorbita dal trasformatore lineare) ed essendo in regime sinusoidale
permanente, avremo anche un assorbimento di potenza reattiva (dovuta alle induttanze di
dispersione e soprattutto a quella di magnetizzazione). La potenza complessa assorbita
dal trasformatore sotto carico risulterà diversa da zero, questo vuol dire che non sarà più
vera l’ipotesi che i flussi di ponza, dal passaggio tra primario e secondario, rimangono
invariati.
Per avvicinarci alle condizioni di idealità dobbiamo ridurre tutti quei parametri che mi
portano un assorbimento di potenza da parte del trasformatore. Dobbiamo quindi calcolare
la potenza complessa assorbita dal trasformatore e trovare il modo di renderla se non
uguale, almeno tendente a zero.
Calcoliamo quindi la potenza al primario e la sottraiamo a quella calcolata al secondario,
questa aliquota di potenza non è altro che la potenza assorbita dal trasformatore:
A& t = V1 I 1* − V2' I 2'*
Posiamo poi esplicitare la potenza complessa dalle equazioni di equilibrio elettrico
(sostituiamo al posto di V1 l’equazione di equilibrio al primario e al posto di V’2 l’equazione
di equilibrio al secondario):
A& t = (z&1d I1 + jωL1 I µ )I1* − ( jωL1 I µ − z&2' d I 2' )I 2'*
A& = z& I 2 + z& ' I ' 2 + jωL I (I * − I '* )
t
1d 1
2d
2
1 µ
1
2
A& t = z& I + z& I + jωL1 I µ
2
1d 1
'
2d
'2
2
2
La parte attiva è data dalle dissipazioni per effetto joule e la parte reattiva e legata alla
potenza reattiva assorbita dall’induttanza di dispersione primaria e secondaria e da quella
di magnetizzazione (dal coefficiente di autoinduzione primaria).
25
in modo da far coincidere V1 e V21.
Per ridurre la potenza reattiva di magnetizzazione è necessario stabilire quale delle due
scelte (agire su L1 o Iµ) sia la più conveniente. Da un analisi matematica ci sembra ovvio
che bisogna diminuire Iµ poiché varia secondo legge quadrata mentre L1 varia secondo
legge lineare. Andiamo perciò ad analizzare la potenza reattiva di magnetizzazione ed
esprimiamola in funzione dei flussi:
Qm = ωL1 I µ2
ma
φm =
L1
I µ ; L1 = ΓN12 quindi sostituendo
N1
Qm = ω
λ12m
L1
=ω
φ12m
Γ
Se siamo collegati ad una rete a potenza prevalente tensione e frequenza sono fisse e
costanti, quindi il valore della pulsazione sarà costante e il valore del flusso di mutua non
può essere variato più di tanto perché è direttamente collegato al valore efficace della
tensione:
V1 = z&1d I1 + jωN1φ m
Infatti riducendo resistenze e induttanze avrò una dipendenza diretta del flusso con la
tensione per cui il flusso risulterà definito dalla tensione di alimentazione e dalle
caratteristiche del sistema. L’unico parametro su cui posso agire per ridurre la potenza di
magnetizzazione è la permeanza г. Massimizzando la permeanza, aumento L1 e
minimizzo automaticamente la corrente Iµ.
Per questo motivo i materiali impiegati per realizzare i supporti dei trasformatori sono quelli
ferromagnetici che hanno alta permeanza e consentono di ridurre i flussi di dispersione e
le resistenze degli avvolgimenti.
VANTAGGI DELL’USO DI MATERIALI FERROMAGNETICI
1) Si ha un forte differenziale tra l’aria e la permeabilità magnetica del ferro, le linee di
flusso sono maggiormente convogliate all’interno del materiale ferromagnetico,
abbiamo dei vantaggi anche sull’induttanza di dispersione.
2) Aumento del coefficiente di autoinduzione principale.
26
3) Diminuzione della potenza reattiva dovuta alla magnetizzazione del nucleo.
4) Riduzione delle sezioni (aumentando il valore di µ, a parità di flusso, avrò una
sezione inferiore) che comporta una riduzione in peso, in volume e dei costi.
SVANTAGGI DELL’USO DI MATERIALI FERROMAGNETICI
1) Caratteristica del ferro non lineare né monodromica, ma polidromica: perché il ciclo
di isteresi è costituito da magnetizzazione e smagnetizzazione diverse fra loro.
2) Perdite nei materiali dovute a isteresi (perdite magnetostatiche) e correnti parassite
(perdite dinamiche).
PERDITE NEI MATERIALI FERROMAGNETICI
I materiali ferromagnetici sono caratterizzati da una caratteristica statica e una dinamica.
La caratteristica statica è rappresentata dal ciclo di isteresi che riproduce delle condizioni
di equilibrio successive:
La magnetizzazione è ciclica ma è il risultato di più fasi di equilibrio successive ad aumenti
graduali di forza magnetomotrice (ottengo una caratteristica magnetostatica)
La caratteristica magnetica statica consente di valutare le perdite per isteresi, le quali sono
legate al valore dell’induzione massima, tramite un coefficiente che dipende dal materiale
K1, e alla frequenza (ovvero al numero di volte che percorro la caratteristica nell’unità di
tempo):
perdite per isteresi = K1 ⋅ f ⋅ Bm2
I materiali ferromagnetici sono buoni conduttori elettrici oltre che magnetici. Considerando
il flusso variabile nel tempo, sulla sezione di materiale, possiamo individuare delle linee
fittizie di circuitazione, in cui può circolare la corrente.
Su queste linee teoriche vi sarà una variazione di flusso e perciò
una tensione indotta (per la legge di Faraday-Lenz ) che genera
una corrente: la corrente parassita. La circolazione di questa
corrente determina una dissipazione di energia dovuta anche alla
resistenza propria del materiale. La caratteristica magnetica
dinamica tiene conto dei fenomeni dissipativi di natura dinamica
e statica, perciò delle perdite per isteresi e delle correnti
parassite:
27
p fe ≅ K1 ⋅ f ⋅ Bm2 + K 2 ⋅ f 2 ⋅ Bm2 [W / kg ]
Il coefficiente K2 è legato alla resistenza propria del materiale e al suo spessore Sp: quanto
più è sottile la lamiera rispetto alla sua lunghezza, tanto più piccole saranno le dissipazioni
(diminuisce K2). Per questo motivo il nucleo del trasformatore è costituito da lamierini
isolati tra loro: questi lamierini hanno uno spessore di circa 0,35 mm per i trasformatori di
media potenza. Valori inferiori di spessore possono determinare dei rischi per la struttura,
rischi legati a forze elettromeccaniche alle quali la struttura è soggetta. Le perdite
specifiche (per unità di peso) sono riferite ad una induzione massima di 1,3-1,7 T.
Per analizzare le perdite complessive bisogna tener conto delle configurazioni geometriche
del trasformatore (sezioni delle colonne e dei gioghi solitamente differenti) e determinare le
perdite complessive (le perdite specifiche moltiplicate per i pesi relativi alle colonne ed ai
gioghi).
Dalla relazione si ricava la potenza dissipata nel ferro quando il nucleo ferromagnetico
viene sottoposto ad un ciclo di magnetizzazione e smagnetizzazione con una frequenza ƒ.
Per esprimere le relazioni non in funzione delle induzioni nel trasformatore ma utilizzando
le tensioni applicate, consideriamo che il valore massimo della tensione indotta è legata al
flusso massimo e quindi dell’induzione massima:
Noto il valore della tensione indotta massima in funzione dell’induzione massima,
sostituendo nell’equazione precedente, otterrò l’espressione delle perdite nel ferro in
funzione della tensione:
Notiamo che se la tensione massima E1m viene tenuta costante, il valore delle perdite nel
ferro è inversamente proporzionale alla frequenza. Questo non era immediato nella
relazione di partenza, perché siamo portati ad affermare che le perdite nel ferro
aumentano linearmente con la frequenza. Ma questo è errato, perché il valore della
tensione è uguale a:
28
E1m = ω ⋅ S c ⋅ Bmc
A parità di tensione, se aumento la frequenza, il valore dell’induzione diminuisce e
conseguentemente diminuiscono le perdite nel ferro.
Per modellizzare queste perdite bisogna considerare che le perdite nel ferro
rappresentano una conversione di energia magnetica in energia elettrica, l’energia
magnetica è fornita a spese dell’avvolgimento primario quando questo e percorso da
corrente. La corrente produrrà un campo magnetico, questo si trasforma in energia
magnetica e quest’ultima in calore. Le perdite nel ferro sono associate quindi ad una
trasformazione di energia elettrica in energia termica attraverso una fase intermedia di
trasformazione in energia magnetica. Quindi il componente che possiamo associare alle
perdite nel ferro è una resistenza.
In base alle relazioni :
Il flusso (e quindi l’induzione da cui dipendono le perdite nel ferro) è direttamente legato
alla tensione indotta: la posizione della resistenza non potrà essere in cascata al primario
ma in cascata all’elemento che rappresenta gli effetti di magnetizzazione e
smagnetizzazione; posizionerò quindi la resistenza in parallelo all’elemento di mutuo
accoppiamento tra avvolgimento primario e secondario L1.
STRUTTURE DI SUPPORTO DEGLI AVVOLGIMENTI
29
Questo è un parametro molto importante perché, una volta definite le caratteristiche
geometriche del nucleo magnetico, ci consente di determinare la resistenza R0 che tiene
conto delle perdite nel ferro. La cifra di perdita si ottiene calcolando la potenza specifica
persa nel ferro per B=1 [T] e per f=50[Hz]:
p fe ≅ K1 ⋅ f ⋅ Bm2 + K 2 ⋅ f 2 ⋅ Bm2
Osserviamo che le perdite per isteresi e quelle associate alle correnti parassite sono
legate all’induzione massima Bm perché solo questo punto ha una corrispondenza
biunivoca con l’intensità di campo H e di conseguenza con la corrente magnetizzante iµ. Le
Pfe aumentano se aumenta l'induzione e aumentano se viene mantenuta costante
l'induzione e viene fatta variare la frequenza. Tendono a diminuire se viene mantenuta
costante la tensione indotta e viene fatta aumentare la frequenza.
30
Analisi trasformatore reale
Dall'analisi energetica del trasformatore lineare abbiamo notato che per poter ottimizzare il
comportamento da un punto di vista energetico e da un punto di vista delle distribuzioni di
tensione del trasformatore è necessario seguire alcuni accorgimenti costruttivi.
L'accorgimento più evidente è l'utilizzo dei materiali che hanno elevate permeabilità
magnetiche, perché con questi materiali posso ridurre la potenza reattiva di
magnetizzazione, in più si esercita un grosso differenziale di permeabilità tra ferro e l'aria,
infine mi consentono di canalizzare la maggior parte delle linee di flusso secondo percorsi
ben definiti. Il vantaggio di questa scelta costruttiva ha delle ripercussioni in termini di
induttanza di dispersione e di resistenza (ma soprattutto di L di dispersione). Infatti se le
linee di flusso vengono catturate dalla diversa permeabilità magnetica abbiamo che
l'aliquota di flusso che si concatena tra l'avvolgimento primario e l'avvolgimento
secondario aumenta, il flusso disperso e le tensioni indotte dal flusso disperso
diminuiscono e diminuisce anche il coefficiente di autoinduzione di dispersione. Quindi
l'effetto dell'uso di materiali ferromagnetici è duplice:
Un miglioramento dell'accoppiamento tra i due sistemi.
Un miglioramento in termini di potenza reattiva assorbita (regime sinusoidale
permanente).
E' vero che i materiali ferromagnetici sono caratterizzati da un'elevata permeabilità, ma
possiedono caratteristiche magnetiche che non sono lineari.
Il requisito da cui siamo partiti per descrivere il modello matematico del trasformatore era
proprio che il sistema magnetico fosse lineare. Ma con l’utilizzo di materiali ferromagnetici
per la costruzione del nucleo perdiamo la linearità del sistema, perché il legame che esiste
tra la causa (l'intensità di campo) e l'effetto (l'induzione magnetica) nei materiali
ferromagnetici non è lineare, ed è di tipo polidromico (significa che la caratteristica di
magnetizzazione e di smagnetizzazione sono diverse). Quindi il ciclo seguito dal materiale
31
è assimilabile ad un ciclo d'isteresi. Il ciclo di isteresi dei materiali ferromagnetici sono
particolarmente complicati e per tal motivo bisogna individuare la tipologia di
magnetizzazione e di smagnetizzazione a cui si fa riferimento. Se per esempio facciamo
riferimento ad un ciclo di magnetizzazione e smagnetizzazione a onda quadra, il
comportamento del materiale sarà diverso rispetto ad un ciclo di magnetizzazione e
smagnetizzazione di tipo sinusoidale e sarà ancora diverso rispetto ad un ciclo di
magnetizzazione e smagnetizzazione di tipo sinusoidale caratterizzato da un valor medio
diverso da zero.
Anche il tipo di funzionamento del sistema dipende dalla tipologia di induzione che noi
applichiamo al nostro sistema. Nelle nostre applicazioni ci interessa realizzare un tipo di
magnetizzazione sinusoidale, questo perché il valore dell'induzione è legato al flusso dalla
sezione del nostro nucleo ferromagnetico e sappiamo bene che la sinusoide è una
funzione che una volta derivata mi da un'altra sinusoide, quindi ragioniamo ancora con
funzioni dello stesso tipo che hanno soprattutto la stessa frequenza.
Una volta definito il ciclo di magnetizzazione (sinusoidale) andiamo a studiare quale è il
luogo dei punti che mi definiscono il materiale quando viene sottoposto ad una
magnetizzazione e ad una smagnetizzazione di tipo sinusoidale ad una frequenza di 50
Hz.
Tracciando sperimentalmente questo ciclo otteniamo una caratteristica del lamierino
(caratteristica di tipo B-H):
Questa caratteristica prende il nome di caratteristica dinamica del lamierino (o del
materiale ferromagnetico) essa è completamente diversa dal ciclo di isteresi, perché la
caratteristica dinamica tende a rappresentare gli stati magnetici seguiti dal materiale
ferromagnetico quando si applica un flusso sinusoidale ad una frequenza di 50 Hz. Quindi
quel ciclo tiene conto, in condizioni di funzionamento a regime, sia dei fenomeni isteretici
(fenomeni di natura magnetostatica) sia degli altri fenomeni dinamici (correnti parassite).
Infatti i materiali ferromagnetici sono anche ottimi conduttori, conseguentemente le linee
geometriche all'interno del materiale sono considerate come delle vere e proprie linee di
circuito elettrico, se sottoponiamo queste linee ad un flusso variabile nel tempo su di esse
vengono indotte delle tensioni, quindi si ha la circolazione di corrente e quindi si hanno
delle perdite. Il ciclo di isteresi dinamico descrive nella sua area tutte le perdite presenti nel
sistema magnetico, sia che siano di natura dinamica (correnti parassite) sia che siano di
natura statica (ciclo di isteresi). La caratteristica magnetica dinamica, per una certa
frequenza e per un certo valore di B, mi consente di descrivere completamente il
comportamento del sistema.
Cosa succede quando variano la frequenza e l'induzione?
32
Ipotizziamo di variare la f lasciando Bmax costante:
p fe ≅ K1 ⋅ f ⋅ Bm2 + K 2 ⋅ f 2 ⋅ Bm2 [W / kg ]
Se aumento f aumentano la perdite per correnti parassite mentre le perdite per isteresi non
cambiano perché una perdita magnetostatica (perdita statica). La perdita per correnti
parassite dipende dalla f e dato che la tensione indotta è direttamente proporzionale alla f,
un incremento di f determina un aumento della tensione indotta e conseguentemente un
aumento della corrente e quindi delle perdite. Perciò il ciclo di isteresi dinamico tende ad
ingrossarsi e a dimagrire rispettivamente all'aumentare e al diminuire della frequenza.
Se aumento il valore di B, il vertice del ciclo di isteresi si sposta lungo un determinato
luogo di punti che prende il nome di caratteristica magnetica del materiale (luogo dei
punti vertici dei cicli d'isteresi dinamici). La caratteristica magnetica generalmente assume
una forma analoga alla seguente (è una caratteristica non lineare):
Ed è molto vicina ad un'altra caratteristica dei cicli d'isteresi cioè la linea media, che
suddivide il ciclo d'isteresi dinamico in due parti perfettamente uguali. Queste due
caratteristiche vengono molto spesso confuse. Ricordiamo che sto ancor ragionando in
termini di B e H perché stiamo parlando di materiali ferromagnetici. Nel momento in cui
voglio passare dalle caratteristiche magnetiche del lamierino alle caratteristiche
magnetiche del trasformatore devo introdurre le dimensioni fisiche del trasformatore.
Quindi non ragionerò più in termini di B e H (che mi definiscono lo stato del materiale) ma
ragionerò in termini di e Ф di iµ che mi definiscono lo stato magnetico del trasformatore.
Infatti la grandezza che mi interessa da un punto di vista magnetico è Ф, mentre da un
punto di vista magnetomotrice è la iµ. Ho immediatamente un'idea della corrente che mi
serve per magnetizzare la macchina. Quindi per passare dalle caratteristiche magnetiche
del materiale alle caratteristiche magnetiche del trasformatore devo introdurre le
caratteristiche geometriche. Perciò dalle seguenti equazioni determinerò il legame tra il
flusso Ф e l’induzione magnetica B e tra la corrente magnetizzante iµ e l’intensità di campo
H e conseguentemente determino la caratteristica magnetica del trasformatore:
33
Nel caso della caratteristiche magnetica del trasformatore, piuttosto che far riferimento al
luogo dei punti vertice dei cicli d'isteresi dinamici (il cui comportamento non lineare in
prossimità di valori di induzione piuttosto bassa e vista la sua utilizzazione nelle diverse
applicazioni), si preferisce utilizzare una caratteristica leggermente linearizzata.
Perché si passa a una caratteristica magnetica del trasformatore che per piccoli
valori di B è lineare?
Abbiamo detto che per passare da una caratteristica del nucleo ferromagnetico ad una
caratteristica del trasformatore bisogna passare attraverso la sua costruzione geometrica
sezione e lunghezza. Poiché non riusciamo a realizzare un nucleo ferromagnetico che è
esclusivamente fatto in tutto il suo percorso solo di ferro, l’aria che costituisce il traferro
ideale si sentirà maggiormente per piccoli valori di B (e perciò di Ф), quindi il traferro
svolge un'azione di linearizzazione per piccoli valori di B.
Ricordo che la caratteristica magnetica del trasformatore descrive il comportamento
magnetico del trasformatore stesso. In certi casi l'azione di linearizzazione è più forte, nel
senso che in certi tipi di trasformatore utilizzati in determinate applicazioni elettroniche
(dove si desidera che il comportamento del trasformatore sia praticamente lineare) le
entità dei traferri che vengono introdotti sono tali da avere una caratteristica praticamente
lineare.
La caratteristica magnetica del trasformatore dipenderà dalle specifiche costruttive, cioè:
34
dalla tipologia dei lamierini;
dalle lunghezze dei gioghi e delle colonne;
dall'entità del traferro che è stato volutamente inserito nel trasformatore.
Perché utilizziamo la caratteristica magnetica e non i cicli d'isteresi dinamici?
Perché in un sistema magnetico ciò che ci interessa principalmente è la quantità di
corrente che dobbiamo fornire per magnetizzare il sistema. Infatti nel caso di una bobina,
calcoliamo la potenza reattiva per valutare l'entità della corrente necessaria per
magnetizzare la bobina stessa.
Visto che i cicli d'isteresi polidromici sono delle caratteristiche la cui area mi rappresenta la
quantità di energia elettrica convertita in energia termica e questa energia non viene
utilizzata per magnetizzare il nucleo, per valutare gli effetti della magnetizzazione facciamo
collassare il ciclo d'isteresi dinamico verso la linea media, otterrei un ciclo a perdite nulle
che mi rappresenta soltanto la magnetizzazione e la smagnetizzazione. Di conseguenza
anziché concentrarmi sull'analizzare contemporaneamente sia il problema relativo alle
perdite, sia quello relativo alla magnetizzazione, posso valutare separatamente tramite la
caratteristica magnetica gli effetti di magnetizzazione della macchina e dato che le perdite
sono una conversione lineare di energia elettrica in energia termica, per questo sistema
posso usare un componente lineare cioè una resistenza che mi tiene conto delle altre
perdite. Nel caso della magnetizzazione devo invece evidenziare un comportamento non
lineare (anche se faccio tendere a zero le perdite). Quindi il Ф è legato alla iµ in maniera
non lineare. Le operazioni che abbiamo eseguito, per trasformare le equazioni riferite ai
valori istantanei che caratterizzano il trasformatore nella notazione simbolica (valide
soltanto in regime lineare) non sono più valide. Per vedere se è possibile adottare ancora
un modello lineare, ed entro quali margini, bisogna analizzare il trasformatore reale
partendo dalle equazioni di equilibrio riferite ai valori istantanei.
Da un'analisi delle caratteristiche magnetiche sembrerebbe impossibile poter utilizzare un
modello lineare perché l'induttanza (che mi rappresenta la magnetizzazione del
trasformatore) posta sotto tensione e1, ha un comportamento non lineare, proprio perché
tra flusso e corrente c'è un legame non lineare. Se non è corretto inserire questo
componente (lineare) nel circuito equivalente vuol dire che è sbagliata tutta la
rappresentazione del circuito. Però, siccome questa rappresentazione è molto comoda,
dobbiamo trovare un modo per poter ricondurci ad essa. L'analisi dovrà basarsi sul
funzionamento del trasformatore, tenendo conto del comportamento non lineare.
Sappiamo che il materiale è caratterizzato da un ciclo d'isteresi dinamico e che, nota la
forma costruttiva del trasformatore, è possibile conoscere il ciclo d'isteresi dinamico del
trasformatore. Sappiamo anche che se utilizziamo materiali ferromagnetici, le cadute di
tensione sulla R e sull'induttanza di dispersione Ld, risultano per lo più trascurabili, tant'è
che si può considerare in prima approssimazione il valore della tensione V1max = V indotta max
e quindi si può legare direttamente il valore di Bmax alla Vmax applicata al sistema. Quindi il
valore di Bmax, una volta definita la tensione, il numero di spire dell'avvolgimento e la
sezione della colonna, è automaticamente conosciuto, e il ciclo è completamente definito.
Partendo dall'equazione di equilibrio elettrico dell’avvolgimento primario ottenuta nel
funzionamento a vuoto, vediamo che il Ф non ha più un legame lineare con la corrente.
di
dφ (i )
v1 = R1i10 + l d 1 10 + N1 ⋅ c 10
dt
dt
v1 = 2V1 sin ωt
N1i10 = ∫ H o dl = φc ∫
dl
⇒ φc = f (i10 )
Sµ (i10 )
35
Ci interessa studiare quando la tensione di alimentazione è sinusoidale. La legge di
circuitazione magnetica mette in evidenza il fatto che a causa della non linearità del
circuito magnetico la permeabilità magnetica del materiale tende a variare istante per
istante, avremo quindi che a seconda del punto di funzionamento la permeabilità, che non
è altro che la pendenza di questa caratteristica, varia punto per punto, quindi la riluttanza è
funzione della corrente che circola nella macchina.
Per risolvere il problema in maniera analitica, dobbiamo utilizzare delle ipotesi
semplificative:
- cercare di trascurare gli elementi dissipativi (ipotesi poi non così "forte") perché nei
trasformatori reali le R e le Ld1 vengono realizzate in modo tale da essere molto
piccole. Quindi, approssimando a zero questi due termini, possiamo dire che:
dφ
v1 ≅ N1 ⋅ c
dt
v1 = 2V1 sin ωt
φc = −
2V1
cos ωt
ωN1
Visto che la tensione è sinusoidale, il Ф è automaticamente determinato ed è di tipo
cosinusoidale, questo per la legge di Lenz. Visto che il Ф è sinusoidale se noi
conoscessimo il legame funzionale in forma chiusa che lo lega alla corrente, potremmo
risolvere la rappresentazione circuitale, ma questa forma non esiste. Quindi si procede per
via grafica che si basa sulla decomposizione del ciclo di isteresi dinamico. Trasformo
completamente il ciclo di isteresi dinamico e lo decompongo in due cicli:
1) Uno è la linea media ed è il ciclo di isteresi dinamico che collassa su se stesso
annullando le perdite.
2) L'altro è il ciclo di isteresi dinamico riferito alla linea media. Fisicamente vuol dire
considerare un nucleo ferromagnetico con perdite diverse da zero che ha una
permeabilità magnetica infinita, ciò significa che rispetto alla linea media definisco il
ciclo di isteresi, raddrizzando la linea media (la trasformo da non lineare a lineare) e poi
le do una permeabilità infinita, in pratica la ruoto fino a quando la linea media rettificata
si congiunge con l'asse delle y.
36
Quindi un ciclo analizza solo la magnetizzazione (perdite nulle) e calcolo la corrente
magnetizzante, l'altro analizza le perdite come se la magnetizzazione fosse nulla, con
questo calcolo la corrente attiva che è responsabile delle perdite nel ferro. Mi aspetto che
la componente attiva sia in fase con la tensione, perché è come se avessimo solo perdite
per correnti parassite (visto che l'induttanza è nulla in questo caso). I processi elettrici che
convertono l'energia elettrica in energia termica sono assimilabili a delle resistenze: hanno
quindi un comportamento lineare. La somma delle due correnti mi da l'effettiva corrente
che circola nel trasformatore a vuoto.
Per via grafica posso ricavare la ia (che è sinusoidale perché in fase con la tensione) e la
iµ. Infatti in precedenza, tenendo conto delle ipotesi semplificative, ho ottenuto il legame tra
tensione di alimentazione (di tipo sinusoidale) e flusso concatenato. Per ciascun valore del
Ф(t), mediante la caratteristica linea media, valuto la iµ, che non è sinusoidale perché
risente del comportamento non lineare della nostra caratteristica:
37
Ripetendo lo stesso procedimento, questa volta relativo al ciclo d'isteresi dinamico riferito
alla linea media, ricavo l’andamento della corrente ia:
Osservando il processo combinato (linea media + ciclo d'isteresi dinamico riferito alla linea
media) tracciato l'andamento della iµ e della ia, e possibile ricavare mediante operazione di
somma la i10.
Dal grafico si nota che la iµ dipende da Bmax quindi da Фmax, se aumento Фmax, avrò una iµ
deformata che presenterà dei picchi di maggior entità. Quindi a seconda del Bmax che
impongo, avrò diversi valori di iµ. Il Фmax inoltre dipende dalla V1 e dalla sezione, al variare
di una o dell'altra, varia il Фmax. A piccole variazioni di Фmax corrispondono grandi variazioni
e deformazioni di iµ. E' un aspetto che deve essere curato con attenzione. La iµ ha
comunque una simmetria pari - dispari, ed è periodica, quindi può essere sviluppata in
serie di Fourier di soli termini dispari:
∞
iµ = 2 ∑ I µ (1+ 2 h ) cos(1 + 2h)ωt
h =0
[
]
38
La ia è sinusoidale ia = 2 I a sin ωt , quindi la i10 che circola a vuoto sarà data dalla loro
somma:
∞
i10 = 2 ∑ I µ (1+ 2 h ) cos(1 + 2h)ωt + 2 I a sin ωt
h =0
[
]
Abbiamo una serie di correnti a frequenze differenti dalla fondamentale. A seconda di
come applichiamo la V sinusoidale, le componenti armoniche di ordine dispari (3^,5^ ecc..)
possono essere molto alte e quindi non possono essere trascurate. Di conseguenza
dall’analisi del trasformatore nel funzionamento a vuoto, si deduce che a causa della non
linearità della corrente i10, il circuito equivalente del trasformatore lineare non è idoneo a
descrivere il funzionamento del trasformatore reale non linearizzato.
Vediamo se questa deformazione è così evidente anche sotto carico. Analizziamo le due
equazioni di equilibrio elettrico al primario e al secondario, alimentiamo con V sinusoidale,
facciamo le opportune operazioni di riporto al primario e si avrà:
39
40
La componente magnetizzante risulta essere si deformata ma ha dei valori di cresta ben
definiti, limitati. La corrente attiva, è una componente che varia in funzione del carico ed è
di tipo sinusoidale (l'ampiezza della sinusoide varia al variare del carico), maggiore è il
carico che io erogo, maggiore sarà il valore della corrente che erogo dal primario al
secondario e maggiore sarà la sua caratterizzazione di tipo sinusoidale.
(Il secondo addendo di queste due equazioni è un elemento deformato, il 1^ è quello
sinusoidale).
In termini di spettro avrò una situazione così:
Rappresento con delle linee le varie componenti sinusoidali, ho la 1^ la 2^ la 3^ armonica e
cosi' via.. la prima è i1µ, la seconda è i2µ,ecc..
In quest'altra rappresentazione ho una fondamentale che è sinusoidale alla f=50Hz, ed è la
componente legata al fatto che io sto erogando potenza.
i1µ aumenta se aumento il carico, alla fine la componente fondamentale aumenta così
tanto che diventa prevalente rispetto alle componenti distorcenti prodotte dalla corrente
magnetizzante. A mano a mano che passo da una situazione di funzionamento a vuoto (in
41
cui è presente solo l'effetto deformante dato dalle caratteristica magnetica non lineare), ad
una situazione di funzionamento a carico, l'effetto distorcente diminuisce sempre più
perché aumenta il "peso" della corrente sinusoidale rispetto alle altre componenti. Questo
termine tende a crescere e, a mano a mano che aumenta, fa si che gli effetti deformanti
possano essere trascurati. Quindi sto tornando ad una situazione di idealità.
Applicando una alimentazione sinusoidale sto ottenendo una corrente sinusoidale, se vale
questo allora posso dire che la rappresentazione circuitale lineare può essere utilizzata
anche se il modello non è lineare perché le componenti magnetizzanti di ordine superiore
sono trascurabili rispetto alle componenti fondamentali sinusoidali che vengono introdotte
dal carico. Quindi da un punto di vista magnetico il trasformatore è un sistema non lineare,
però ha questo vantaggio, e cioè che applicandogli una tensione sinusoidale produca una
corrente sinusoidale che aumenta all'aumentare della potenza richiesta dal carico.
Incominciamo a vedere l'effetto distorcente della corrente solo quando riduciamo il carico.
In conclusione anche se da un punto di vista fisico il sistema è non lineare, non
commettiamo grossi errori se consideriamo lineare il funzionamento sotto carico. La
rappresentazione lineare del circuito non è però valida in condizioni di funzionamento a
vuoto. Però, poiché non m'interessa fare un'analisi dell'evoluzione della corrente effettiva
circolante nel sistema (tanto gli strumenti di misura valutano i valori efficaci delle
grandezza P attiva e Q reattiva), considero una corrente sinusoidale a vuoto che ha un
valore efficace uguale al valore efficace della corrente deformata che circola a vuoto nel
trasformatore. In questo modo posso continuare ad utilizzare il modello circuitale lineare e
semplice, facendo le seguenti ipotesi semplificative:
Nel funzionamento sotto carico il comportamento è lineare.
Nel funzionamento a vuoto la corrente ha un'evoluzione sinusoidale e il valore
efficace sia uguale al valore efficace della corrente deformata.
L'unico errore (trascurabile) che si commette nel rappresentare il trasformatore in questo
modo è nella valutazione della ripartizione delle potenze reattive che vengono assorbite
parte dall'induttanza di dispersione e parte dalla reattanza di magnetizzazione (sono
comunque errori ingegneristicamente accettabili perché sono sotto il 5%).
Concludendo: il sistema fisico è non lineare però in condizioni di carico può essere
considerato lineare e in condizione di funzionamento a vuoto può essere assimilato ad una
struttura lineare equivalente.
Funzionamento fisico del trasformatore
Fin qui non abbiamo ancora approfondito quelli che sono i meccanismi attraverso i quali
avviene il trasferimento di energia dal primario al secondario. Quindi concentriamoci sul
modo in cui si sviluppa il funzionamento del trasformatore reale, cioè su quelle che sono le
caratteristiche di funzionamento fisico del trasformatore. Partiamo dalla struttura
semplificata, ipotizziamo di considerare un nucleo ferromagnetico, un avvolgimento
primario con N 1 spire e un avvolgimento secondario con N 2 spire e ipotizziamo di
rappresentare mediante il circuito equivalente il nostro trasformatore:
42
Andiamo ad analizzare cosa accade nel trasformatore nel funzionamento sotto carico da
un punto di vista fisico. Quindi partiamo dall’analisi del funzionamento a vuoto e poi ci
mettiamo un carico, ovviamente trascurando quelli che sono gli effetti transitori.
Ipotizziamo di applicare sull'avvolgimento primario una tensione V1 che risulta essere di
tipo sinusoidale:
V 1 = 2 ⋅ V 1 sin ωt
Ipotizziamo che la rete che allacciamo all'avvolgimento primario sia una rete di potenza
prevalente, cioè qualunque sia il comportamento sull'avvolgimento secondario, la tensione
primaria rimane caratterizzata dallo stesso valore efficace e dalla stessa pulsazione, quindi
la frequenza e l'ampiezza della tensione primaria sono invarianti al variare delle condizioni
di carico (condizione ideale, ma ci serve per porre almeno un riferimento). Quando
alimentiamo l'avvolgimento primario sappiamo che è valida l'equazione di equilibrio
elettrico dell'avvolgimento primario, circolerà la corrente a vuoto I 10 , sappiamo che grazie
alla elevata permeabilità del nostro nucleo ferro magnetico e alla compenetrazione degli
avvolgimenti primari e secondari la resistenza e la reattanza di dispersione sono molto
piccoli. Quindi la I 10 è piccola, perché vogliamo farla piccola da un punto di vista
energetico. Le induttanze di dispersione sono piccole quindi le cadute di tensione
sull'impedenza di dispersione sono trascurabili rispetto alla tensione applicata. Quindi
potremo sicuramente affermare che V 1 risulta essere esattamente uguale in prima
approssimazione a:
V 1 ≅ − E10
Sapendo che la tensione E10 risulta essere legata al flusso mediante la seguente
relazione:
− E10 = jωN 1 ⋅ φm 0
se la tensione è sinusoidale, il flusso a vuoto φm 0 è sinusoidale e risulta essere tale da
produrre una tensione indotta E10 che risulta essere uguale ed opposta alla tensione di
alimentazione. Da un punto di vista vettoriale:
43
Da un punto di vista temporale se noi avessimo la possibilità di fotografare in un certo
istante la tensione V 1(t ) , questa risulta essere sinusoidale e il nostro flusso φm 0(t ) presenta
un andamento che risulta essere in ritardo di 90°:
Ovviamente sull'avvolgimento secondario verrà indotta una tensione E 20 che risulta essere
uguale a:
− E 20 = jωN 2 ⋅ φm 0
Quindi avremo che il rapporto tra le due tensioni indotte risulta essere pari al rapporto
spire:
− E 20 jωN 2 ⋅ φm 0
E 20 N 2
=
→
=
− E10
jωN 1 ⋅ φm 0
E10 N 1
Perciò la tensione indotta al secondario E 20 risulta essere pari a:
E 20 =
N2
⋅ E10
N1
Teniamo conto che la convenzione che stiamo adottando e quella che i flussi dovranno
essere concordi, quindi se i segni dei pallini sono quelli rappresentati in figura, i versi delle
tensioni indotte sono le seguenti:
44
Abbiamo quindi la condizione di funzionamento a vuoto.
Vediamo ora cosa succede se vado ad applicare un carico all'avvolgimento secondario,
ragioniamo da un punto di vista fisico piuttosto che matematico. Quando chiudiamo il tasto
sul nostro sistema risulta essere applicata una tensione che risulta essere per la punto la
tensione V 2 . La tensione V 2 fa circolare una corrente che tende ad opporsi alla causa che
l'ha generata, ma la causa che ha generato la tensione e quindi la corrente è il flusso φm .
Quindi la tensione indotta E 2 tende a far circolare un flusso che tenderà per sua natura ad
opporsi al flusso φm 0 . Quindi avrà per definizione un'azione antagonista per ridurre la
causa che l'ha generata. Quindi c'è la riduzione del flusso φm complessivo, ma questa
riduzione del flusso determina una riduzione della tensione indotta, ma se abbiamo una
riduzione della tensione indotta abbiamo anche, perché le equazioni di equilibrio siano
soddisfatte, un incremento di corrente che mi deve rispettare le equazioni di equilibrio
elettrico. Quindi ha una riduzione del flusso corrisponde una riduzione di tensione che
richiama una circolazione di corrente. A regime quindi, avremo che ci sarà un flusso φm1
prodotto dalla circolazione della corrente I 1 , un flusso φm 2 prodotto dalla circolazione della
corrente I 2 e la combinazione di questi due flussi mi darà un flusso risultante che produrrà
una tensione complessivamente indotta che consentirà il flusso di potenza
dall'avvolgimento primario all'avvolgimento secondario. In altre parole abbiamo che poter
garantire il flusso di potenza al carico Z&u non dobbiamo ragionare soltanto in termini di
ampiezza di tensione indotta ma anche di fase di tensione indotta. Quindi la combinazione
dei due flussi viene valutata nel tempo, perché la combinazione dei due flussi farà in modo
che la tensione complessivamente indotta assuma un modulo e una fase tale da far
circolare quella corrente che mi garantisce lo scambio di potenza da primario al
secondario. E’ una sorta di principio di azione e reazione, io ho il sistema perfettamente
equilibrato a vuoto, ho la tensione E10 e l'unico flusso φm 0 . Applico la condizione di carico
senza sapere il suo valore, può essere ohmico induttivo, ohmico capacitivo solo ohmico
(non lo so), però sono sicuro che la corrente che circola, rispettosa della legge di Faraday
Lenz, deve opporsi alla causa che lo ha generato, quindi deve esercitare un'azione di
smagnetizzazione della macchina. Quindi la corrente tende sicuramente a ridurre
l'ampiezza della tensione indotta. Questa riduzione della tensione indotta, perché
l’equazione di equilibrio elettrico: V 1 = Z&d 1 ⋅ I 1 − E1 sia verificata, poiché la tensione di
alimentazione V 1 è costante (perché siamo in una rete di potenza prevalente) la I 1 deve
aumentare in modo tale che la caduta di tensione mi contro bilanci la tensione indotta. A
questo punto la corrente I 1 mi produce una variazione di flusso (una contro reazione, alla
smagnetizzazione corrisponde una magnetizzazione del primario). Quindi avremo due
flussi, un flusso di reazione dell'avvolgimento secondario e un flusso di rimagnetizzazione
dell'avvolgimento primario. Questi due flussi si comporranno alla fine per formare un unico
45
flusso di mutua φm , che farà in modo che la tensione indotta assuma un modulo e una fase
tale per cui la corrente I 2 circoli in modo tale da garantire quel flusso di potenza
complessa dal primario al secondario. Teniamo conto che siamo in regime sinusoidale
permanente, e che quindi, non si deve soltanto ragionare in termine di potenza attiva ma
anche i termini di potenza reattiva che viene erogata. Quindi la corrente I 2 e la corrente I 1
, deve appunto garantire al carico quella potenza attiva e quella potenza reattiva.
Quindi l'azione di combinazione dei due flussi è fondamentale, è un'azione di
combinazione in modulo e fase che mi consente alla fine di arrivare ad una condizione di
tensione complessivamente indotta sulla faccia che mi garantisce quel trasferimento di
potenza complessa dal primario al secondario. Capite bene che il comportamento
dell'avvolgimento primario e dell'avvolgimento secondario è strettamente interconnesso
dall'accoppiamento dei flussi di mutua, quindi i flussi di mutua giocano per l’appunto un
ruolo fondamentale. E siccome siamo in regime sinusoidale permanente, non giocano un
ruolo soltanto nelle ampiezze dei due flussi secondario e primario ma anche dei loro
sfasamenti. Quindi lo sfasamento fra i due flussi mi determina un flusso risultante e quindi
una tensione indotta risultante che consente una circolazione della corrente I 1 con il
modulo e la fase giusta per poter erogare il flusso di potenza. Capite che se io vario il
carico automaticamente riconfiguro la struttura, perché variando il carico vario la corrente
I 2 , conseguentemente vario il flusso φ 2 m , varia quindi il flusso risultante, la fase e il
modulo della tensione indotta e quindi varia la potenza che viene richiamata dal primario.
Questo è il comportamento fisico del trasformatore, è un comportamento banale però per
l’appunto estremamente efficace e non solo, grazie al fatto che il sistema risulta essere
quasi perfettamente accoppiato, estremamente efficiente. Quindi si può avere un
trasferimento di potenza attiva e reattiva dal primario al secondario in modo estremamente
efficiente. La corrente magnetizzante non rimane sempre la stessa perché questa risulta
essere funzione della tensione indotta e la tensione indotta risulta essere variabile al
variare della corrente I 1 . Questa è un'analisi fisica del sistema poi è un’altra cosa l'analisi
tecnologica. Sappiamo che nella realtà noi quando andiamo a studiare il nostro
trasformatore, riteniamo che la caduta di tensione sull'impedenza di dispersione primaria
sia trascurabile, quindi riportiamo il ramo magnetizzante a monte e diciamo che la corrente
magnetizzante è costante, ma non è assolutamente così. Se non ci fosse per la punto
l’impedenza di dispersione, il trasformatore non potrebbe funzionare come nella realtà
funziona. Quindi questo è il funzionamento fisico del sistema, poi le semplificazioni che noi
introduciamo per risolvere più velocemente e per arrivare a dei risultati che sono molto
vicini a quelli reali e un'altra cosa. Tanto che quando si parla del passaggio dal
funzionamento a vuoto al funzionamento a carico si parla appunto di deflussaggio o
iperflussaggio a seconda che il carico risulti essere induttivo o capacitivo.
Dimensionamento delle grandezze caratteristiche del trasformatore
Adesso sulla base della compressione fisica del fenomeno dovremo fare un minimo di
valutazione relativamente al dimensionamento e vedere quali sono le grandezze che mi
caratterizzano il trasformatore. Quando abbiamo incominciato a studiare il trasformatore o
meglio le macchine elettriche abbiamo detto che uno degli aspetti fondamentali della
macchina elettrica era l'aspetto termico. Le macchine elettriche quando si riscaldano
determinano una sovra temperatura rispetto all'ambiente esterno, la sovra temperatura
non deve superare un certo limite perché altrimenti gli isolamenti nel tempo si degradano.
Abbiamo visto che la sovra temperatura è strettamente legata alla potenza che viene
erogata dal trasformatore, quindi sicuramente un elemento fondamentale nella definizione
46
della macchina elettrica è la potenza. A questo punto ci poniamo il problema di quale
potenza bisogna considerare, la potenza attiva o la potenza reattiva? Qui abbiamo una
macchina elettrica statica in cui le perdite risultano essere direttamente collegate alle
correnti che circolano nella macchina, per tanto, più che alla potenza attiva che è erogata,
è importante conoscere la potenza apparente, perché alla potenza apparente è
direttamente collegata al valore della corrente. Quindi conoscendo la corrente che può
circolare continuativamente nel trasformatore, conosciamo quale è la temperatura che può
raggiungere e quindi che può sopportare in regime continuativo. Quindi il parametro che
sicuramente mi definisce il trasformatore da un punto di vista delle potenze risulta essere
la potenza apparente del trasformatore, che viene indicata per la punto nel dato di targa
del trasformatore.
Ora però per il dimensionamento questo dato non risulta essere ancora sufficiente perché
la potenza apparente sapete che è data dal prodotto della tensione nominale per la
corrente nominale: An = Vn ⋅ In , bisogna definire uno di questi due parametri per poter
ricavare l'altro. Noi abbiamo sempre parlato in termini di corrente per poter valutare le
perdite all'interno del trasformatore, quindi si capisce immediatamente che bisogna fissare
uno di questi termini per poter ricavare l'altro. Nelle macchine elettriche generalmente il
parametro che viene indicato sempre è la tensione nominale, questo perché essendo la
tensione nominale direttamente collegata alla tensione indotta ed essendo questa
direttamente legata ai flussi, in regime sinusoidale permanente, ci definisce il punto di
lavoro del ferro in maniera univoca. Quindi la definizione della tensione nominale è
fondamentale per poter definire quello che risultano essere le condizioni a cui deve essere
fatto lavorare, in termini di flusso, il mio trasformatore. Quindi un parametro dimensionale
di fondamentale importanza, che generalmente viene sempre indicato nel trasformatore,
oltre alla potenza, è la tensione nominale. Siccome siamo in regime sinusoidale
permanente, un altro parametro che ci interessa oltre il valore della tensione in valore
efficace e la frequenza industriale, che generalmente risulta essere di 50 Hz. Noti questi
tre parametri, è possibile in forma approssimata arrivare alla definizione della dimensione
del trasformatore. Ovviamente il tutto è strettamente legato ai materiali che vengono
utilizzati, ai sistemi di raffreddamento, ma i parametri precedenti sono quelli fondamentali.
In particolare la potenza nominale è un parametro di riferimento che viene utilizzato come
riferimento dei parametri magnetici ed elettrici del sistema.
Si vede infatti che se noi consideriamo il rapporto fra la tensione nominale e la corrente
nominale, in valore efficace, otteniamo dimensionalmente un'impedenza, o meglio il
modulo di un impedenza. Questa impedenza è definita impedenza base del nostro
Vn Vn 2
=
trasformatore ed è direttamente legata soltanto alla tensione e alla potenza: Zb =
.
In
An
Per l’impedenza base, praticamente, non c'è bisogno di definirla in fase, perché la fase mi
indica semplicemente la ripartizione tra potenza attiva e reattiva (non ci interessa). A noi
da un punto di vista delle perdite, all'interno del trasformatore, ci interessa il valore della
corrente che circola nel trasformatore e a parità di potenza nominale qualunque sia la fase,
la corrente è sempre la stessa e quindi il modulo dell'impedenza base sarà sempre lo
stesso. Quindi l'impedenza base risulta essere il modulo dell'impedenza che fa si che
all'interno del nostro trasformatore circoli la corrente nominale, quindi ci si trovi in
condizione di potenza apparente erogata di tipo nominale. Quindi è una quantità che può
essere tranquillamente utilizzata come riferimento, per la definizione dei parametri del
trasformatore. Noi quando abbiamo parlato di impedenza di dispersione e impedenza di
magnetizzazione, abbiamo sempre detto che l'impedenza di dispersione va fatta piccola
mentre l'impedenza di magnetizzazione va fatta grande. Ma rispetto a che cosa?
L'impedenza piccola e grande va fatta rispetto a quelle che sono le caratteristiche
47
dimensionali della macchina, quindi rispetto all'impedenza che mi definisce la potenza
della macchina e in funzione delle condizioni operative nominali, perciò rispetto
all'impedenza base. Quindi il nostro trasformatore andrà dimensionato in termini di
impedenza di dispersione e di magnetizzazione in modo tale che l'impedenza sia
rispettivamente piccola rispetto all'impedenza base e grande rispetto all'impedenza base.
L'impedenza di dispersione risultano essere del 2% rispetto all'impedenza base e le
impedenza di magnetizzazione sono dell'ordine di 100-400 volte l'impedenza base, questo
per la punto per ottimizzare il comportamento energetico della macchina. Quindi vedete
come l'aspetto termico e tecnologico mi impone le caratteristiche di potenza nominale della
macchina e queste mi definiscono un riferimento rispetto al quale dimensionare gli altri
parametri del mio sistema elettromagnetico. Quindi abbiamo detto che il trasformatore
viene definito inizialmente per la potenza nominale. Abbiamo detto che la definizione della
potenza nominale e della tensione nominale del trasformatore ci consente
automaticamente di definire una impedenza di riferimento che l'impedenza che applicata
sul avvolgimento secondario mi consente il flusso di potenza, pari alla potenza nominale.
Questa impedenza è presa come riferimento nella definizione dei parametri circuitali del
trasformatore. Ma quale impedenza dobbiamo scegliere? Perché sappiamo che del
trasformatore sono presenti due avvolgimenti, un avvolgimento primario e un avvolgimento
secondario. Quindi sicuramente esisterà un'impedenza base per l'avvolgimento primario e
una impedenza base per l'avvolgimento secondario. Indicando con Zb1 l'impedenza base
dell'avvolgimento primario, questa risulta essere pari a:
Zb1 =
Vn1 V 1
=
In1 In1
Zb1 =
V 1 V 1 V 12
⋅ =
V 1 In1 An
Il problema nasce nella definizione della impedenza base secondaria Zb 2 , perché se
andiamo ad analizzare il circuito equivalente del trasformatore, abbiamo che i valori di
tensione presenti sull'avvolgimento secondario non risultano essere più indipendenti dalle
condizioni di carico. infatti a seconda di quello che è il carico sul secondario, quindi della
'
'
corrente I 2 il modulo e fase assorbita, abbiamo che la tensione V 2 può risultare essere
differente. Quindi non si può più ragionare in questa maniera. Ci poniamo il problema di
definire in maniera univoca una tensione di riferimento secondaria come quella che
abbiamo definito per il primario. Allora per definire una tensione di riferimento secondaria
si osserva quale condizione del nostro trasformatore è più vicina alle condizioni di idealità.
Quale è la condizione più vicina alle condizioni di idealità? E’ la condizione di
funzionamento a vuoto, in cui la tensione V 20 risulta essere praticamente invariante, cioè
noi possiamo modificare qualsiasi cosa ad esempio: la temperatura ambiente, il rumore,
l'ambiente in cui la mettiamo, però se noi applichiamo una V 1 , il valore della tensione a
vuoto deve rimanere sempre la stessa. Quindi definiamo per l’appunto V 20 come la
tensione nominale presente al secondario e rispetto a questa riferiamo anche il valore
della corrente nominale del secondario. Quindi avremmo che la Zb 2 risulta essere
V 20
V 20 V 20 V 20 2
esattamente uguale a:
Zb 2 =
Zb 2 =
⋅
=
In 2
V 20 In 2
An
oltre tutto la V 20 è direttamente determinabile una volta noto il rapporto di trasformazione,
perché sappiamo che il valore della V 1 è pari a:
V 1 = − K ⋅ V 20
Quindi andando a sostituire nella relazione precedente, si vede che la Zb 2 risulta essere
esattamente uguale a:
48
Zb 2 =
Zb1
K2
Questo mi ricorda il riporto delle grandezze dall'avvolgimento primario all'avvolgimento
secondario. Quindi le due impedenza di base risultano essere legate dal rapporto di
trasformazione al quadrato K 2 . Quindi se noi prendiamo la tensione secondaria e
l'impedenza base secondaria e la riportiamo al primario, otteniamo esattamente la Zb1 .
Quindi dal punto di vista delle operazioni di riporto, Zb1 e Zb 2 sono esattamente la stessa
cosa. La corrente nominale secondaria è definita, una volta definita la tensione secondaria
di riferimento, e quindi tale parametro è ricavato mediante rapporto tra:
An
I 2n =
V 20
Si vede immediatamente che se noi eseguiamo le operazioni di riporto delle grandezze dal
secondario al primario e le moltiplichiamo per l'impedenza base, otteniamo delle qualità
relative esattamente identiche. Quindi le espressioni delle impedenze base, così definite,
ci consentono di affermare che le impedenze relative. definite come rapporto tra le
impedenze effettive diviso le impedenze base, risultano essere invarianti rispetto al
sistema di riferimento prescelto. Il vantaggio di utilizzare le grandezze base è quello di
ottenere una rappresentazione circuitale simbolica, poiché non abbiamo più resistenze e
induttanze, che risulta essere identica qualunque sistema di riferimento noi scegliamo, o il
primario o secondaria. Questo è un grosso vantaggio perché non mi devo più preoccupare
di definire il sistema di riferimento a cui mi dispongo, scelgo un'unica rappresentazione e
su questa faccio i conti e poi successivamente decido a quale sistema di riferimento riferire
le grandezze. Secondo, ho un andamento dell’impedenza, successivamente delle correnti
e delle tensioni, che sono riferite alle grandezze nominali. Quindi le grandezze che io
calcolo sono tutte riferite ai rispettivi valori nominali, quindi io conosco qual è il valore della
corrente in percentuale rispetto alla corrente nominale. Se dico di un trasformatore, circola
una corrente di 300 A su una potenza di 2000 KVA, oppure dico che circola una corrente
che il 5% della corrente nominale, ho delle informazioni che sono totalmente diverse. In un
caso devo andare a calcolare quei 300 A cosa voglio dire per quella potenza nominale
mentre nell'altro caso ho direttamente il peso della corrente rispetto alla corrente nominale.
Quindi ho delle informazioni nella rappresentazione simbolica che sono univoche e sono
direttamente legate al funzionamento della macchina, sia in termini di tensione, che di
corrente, che di potenza attiva e reattiva. Quindi la rappresentazione riferita all’impedenza
base o riferita alle grandezze nominali della macchina è estremamente interessante per
l'analisi esaustiva del trasformatore. Ipotizziamo di considerare il circuito equivalente della
macchina, noi fino al adesso abbiamo visto il circuito in termini di grandezze fisiche nel
seguente modo:
49
Noi vogliamo riportare queste grandezze alla forma in P.U, cioè in forma relativa, e per
fare questa operazione è necessario dividerle per le grandezze di riferimento
corrispondenti. Per quanto riguarda le tensioni e le correnti bisogna dividerle per la
tensione nominale primaria e la corrente nominale primaria, perché il circuito è riferito
all'avvolgimento primario. I parametri di impedenza vanno divisi per l’impedenza di base
primaria. A questo punto ho ottenuto un circuito equivalente che non ha più significato
fisico, perché ho diviso un'impedenza per un'altra impedenza e quindi abbiamo una
quantità adimensionale.
Abbiamo una rappresentazione simbolica, quindi abbiamo un circuito simbolico che è
rappresentato mediante grandezze in P.U. Quindi sarà schematizzato mediante degli
operatori numerici che mi consentono di associare alle grandezze, dei numeri in P.U, che
noi trasformeremo in grandezze fisiche mediante il prodotto con la rispettiva corrente
nominale, tensione nominale e impedenza di base nominale.
Questa rappresentazione è unica sia al secondario che al primario. Molto spesso più che il
valore in P.U, viene usato il valore in percentuale, cioè la quantità in P.U viene moltiplicata
per 100 e quindi viene riportata in forma percentuale. Generalmente questo valore è quello
che viene riportato nei dati di targa, quindi le grandezze che vengono utilizzate come dati
di targa del trasformatore sono tutte le grandezze che fanno riferimento a questa
50
notazione, che adesso andiamo a vedere. Fino adesso avevo definito del trasformatore i
seguenti dati di targa:
potenza nominale, frequenza, tensione nominale, corrente nominale e il rapporto di
trasformazione
Ora però per poter caratterizzare e definire immediatamente il trasformatore fisico nella
rappresentazione equivalente, abbiamo bisogno di altre informazioni, in particolare
abbiamo bisogno di informazioni che ci consentono di determinare i parametri circuitali del
trasformatore nella forma canonica o in forma relativa. Quindi bisogna vedere quale altre
informazioni ci devono essere date per poter passare dalla struttura fisica alla
rappresentazione circuitale. Per poter fare queste operazioni ci serve poter condurre due
prove: la prova a vuoto e la prova in cortocircuito. Questo corrisponde ad una serie di
informazioni che vengono riportate sulla targa del trasformatore. I valori che vengono
riportati sui dati di targa del trasformatore sono essenzialmente 4, due relativi alla prova a
vuoto e due relativi alla prova in cortocircuito. Quelli relativi alla prova a vuoto sono:
-
la corrente a vuoto I 0 , generalmente espressa in percentuale
la Potenza a vuoto P 0 , espressa anch'essa in percentuale, oppure il cos φ 0 (ma
generalmente viene indicato il P 0 )
Per quanto riguarda la prova in cortocircuito i parametri che vengono indicati sono:
-
la tensione di cortocircuito Vcc , anch'essa espressa in percentuale
la potenza di cortocircuito Pcc , espressa in percentuale, oppure il fattore di
potenza di cortocircuito cos φcc
Questi vengono espressi in percentuale in modo tale che non ci siano fraintendimenti nella
definizione da associare alla prova. Vediamo come si ricavano queste prove e quale
informazioni ci consentono di ottenere queste due misure.
Prova a vuoto
Nella prova vuoto il trasformatore viene collegato ad una rete di potenza di distribuzione
dell'energia elettrica, in modo tale che la tensione applicata risulti essere proprio la
tensione nominale. Il problema che si pone è quello di individuare quale coppia di morsetti
è necessario collegare al nostro sistema per effettuare la prova.
Noi siamo abituati a ragionare in morsetti primari o morsetti secondari, ma è molto più
conveniente fare una distinzione di morsetti di alta tensione e di bassa tensione. Noi
sappiamo che generalmente nei trasformatori la corrente a vuoto assume, proprio per
caratteri costruttivi, valori abbastanza bassi ( la corrente magnetizzante deve essere la più
piccola possibile ). Quindi ci poniamo il problema di poter effettuare una misura della
corrente I 0 , che risulti essere rilevabile dai nostri strumenti di misura. Almeno questo era il
problema che ci si poneva in passato quando c'era difficoltà nel misurare le correnti. In
questo caso tenendo conto del rapporto di trasformazione conviene effettuare la misura a
vuoto dove la corrente a vuoto risulti essere in valore assoluto più elevata, perché in
questa maniera o la possibilità di avere degli strumenti di misura che la rilevano con una
minore incertezza. Inserisco i dispositivi sul lato dove la corrente è più elevata, quindi in
bassa tensione. La misura la faccio sul lato in bassa tensione indipendentemente dal fatto
51
che questo sia avvolgimento primario o secondario. Quindi andremo ad inserire i nostri
strumenti di misura secondo il seguente schema:
A questo punto vado a rilevare il valore della corrente I 0 che circola nel nostro sistema e
la potenza P 0 . Questo sono le due informazioni relative alla prova a vuoto. Queste due
quantità la corrente I 0 e la potenza P 0 vengono divise rispettivamente per la corrente
nominale del lato di bassa tensione e per la potenza nominale, entrambe moltiplicate per
100 e vengono riportate sui dati di targa del trasformatore. Queste misure mi consentono
di definire il valore dell'impedenza di magnetizzazione. Vediamo perché, tenendo conto
della rappresentazione circuitale della prova a vuoto:
Siamo nel funzionamento a vuoto quindi le correnti sono generalmente piccole rispetto alla
corrente nominale, generalmente dell'ordine del 2-3% della corrente nominale. Quindi la I 0
nei trasformatori Mt/Bt, di cui noi parliamo, sono 0.02-0.03 In mentre le impedenze di
dispersione solo il 2÷5% dell'impedenza base. La caduta di tensione sull'impedenza di
dispersione risulta essere approssimativamente uguale, nelle condizioni peggiori, a:
∆Vz&d = Z&d ⋅ I 0 = 3 ⋅ 10 −2 Zb ∗ 5 ⋅ 10 −2 In = 15 ⋅ 10 −4 Vn
Tenendo conto dei valori più alti avremmo una caduta di tensione di 15 ⋅10 −4Vn , cioè
abbiamo che in condizioni di funzionamento a vuoto la caduta di tensione sull'impedenza
di dispersione risulta essere circa 1.5‰ della tensione nominale approssimativamente.
Perciò il 99, 99% della tensione va a cadere sull'impedenza di magnetizzazione. Quindi
possiamo in prima approssimazione ritenere che la potenza P 0 risulti essere assorbita
totalmente dalla resistenza R 0 e la I 0 sia pari proprio alla corrente di magnetizzazione.
Ma quindi se la P 0 risulta essere la potenza assorbita dal ramo magnetizzante e la I 10 = Im ,
immediatamente abbiamo tutti dati per poter calcolare il valore della reattanza Xm e della
R 0 . Infatti avremo che:
Vbt 2
Vbt 2
R0 =
Xm =
P0
Q0
52
Quindi mediante
magnetizzazione.
queste
misure
noi
definiamo
immediatamente
l'impedenza
di
Prova in cortocircuito
Usiamo lo schema che abbiamo adottato precedentemente:
Analizziamo cosa succede a regime quando mettiamo in cortocircuito il nostro sistema.
Anzitutto, affinché il nostro sistema sia in cortocircuito, è necessario realizzare un
collegamento franco tra il morsetto 1 e il morsetto 2 dell'avvolgimento secondario, questo
vuole dire che l'impedenza con cui realizzo il cortocircuito deve essere molto più bassa
dell'impedenza di dispersione secondaria. Alimento il nostro avvolgimento a vuoto, il flusso
φm 0 mi induce la tensione E10 , chiudiamo l'avvolgimento secondario in cortocircuito. A
questo punto non abbiamo da alimentare niente, perché non c'è un carico applicato. In
questa situazione di cortocircuito, l'effetto della circolazione della corrente è solo uno ed
uno solo, cioè quello di opporsi alla causa che lo ha prodotto. Perciò la corrente tende a
circolare nell'avvolgimento in modo tale da smagnetizzare la macchina. La corrente cerca
di smagnetizzare, però abbiamo che dall'altra parte c'è una tensione applicata che
richiama una corrente che tende ad opporsi alla causa smagnetizzante. Quindi sia
nell'avvolgimento primario che in quello secondario saranno presenti correnti circolanti
estremamente elevate. L'unico elemento che si oppone alla circolazione di queste correnti
sono le impedenze di dispersione. Questo determina un incremento notevole delle correnti
in condizioni di cortocircuito, raggiungiamo valori di corrente che risultano essere a regime
25 ⋅ In . Quindi realizzare un'operazione di cortocircuito netto risulta essere rischioso perché
sottopongo gli avvolgimenti a uno stress termico notevole. La temperatura può salire molto
rapidamente perché il fenomeno è praticamente adiabatico, inoltre questi avvolgimenti
sono immersi in un campo quindi sono sottoposti a delle azioni elettrodinamiche e perciò
gli avvolgimenti sono soggetti a una sollecitazione meccanica che, essendo proporzionale
al quadrato della corrente, risulta essere 625 volte superiore alle condizioni operative. E
non è finita, se l'avvolgimento si riscalda troppo, l'avvolgimento può passare da un campo
di funzionamento elastico a un campo di funzionamento plastico da un punto di vista
meccanico, quindi alla fine può deformarsi in maniera permanente se non addirittura
rompersi. Quindi realizzare un cortocircuito non è una cosa pericolosa per il trasformatore
perché è fatto per resistere temporaneamente a un cortocircuito però non bisogna
esagerare, quindi io non faccio una prova in cortocircuito. Secondo bisogna vedere se le
prove di cortocircuito e quindi la misura di cortocircuito si può fare esclusivamente quando
circola una corrente in cortocircuito, oppure si può ottenere lo stesso risultato magari
53
facendo una misura nelle stesse condizioni al contorno però con una corrente più bassa.
Allora andiamo a vedere il circuito equivalente del trasformatore in cortocircuito:
Quindi l'impedenza d'ingresso Zcc del nostro trasformatore sarà pari a:
Vin &
Z& 0 ⋅ Z&d 2 '
Z&cc =
= Zd 1 +
Z& 0 + Z&d 2 '
Iin
Ma cosa abbiamo detto fino ad ora, il trasformatore viene realizzato in modo tale che
l'impedenza di magnetizzazione sia grande rispetto all'impedenza base e l'impedenza di
dispersione sia piccola rispetto all'impedenza base. Quindi tra la Z& 0 e la Z&d 2 possono
esserci diversi ordini di grandezza di differenza, tanto che non commettiamo un grosso
errore se non consideriamo o consideriamo questa somma Z& 0 + Z&d 2 ' uguale a Z& 0 . Ma
questo punto l'equazione si semplifica e diventa:
Z&cc ≅ Z&d 1 + Z&d 2 '
Ma l'impedenza di dispersione primaria e di dispersione secondaria sono relative a delle
impedenze in condizioni di funzionamento lineare. Abbiamo che i flussi di dispersione
viaggiano in aria e le resistenze sono le resistenze degli avvolgimenti, quindi se noi
realizziamo la seguente operazione: se ad una corrente pari alla corrente di cortocircuito
ho una corrente nominale, per la definizione di impedenza di cortocircuito definita come
rapporto tra la tensione applicata e la corrente circolante, il valore della Z&cc è invariante
qualunque sia il rapporto tensione corrente che si viene a verificare sull'impedenza. Cosa
vuol dire questo, che la misura dell'impedenza di cortocircuito non è modificata per le
caratteristiche di linearità dell'impedenza di cortocircuito qualunque sia il valore della
tensione che vado ad applicare nelle condizioni di cortocircuito. Quindi non è necessario
che io faccio la prova con la tensione nominale e la corrente di cortocircuito effettivo,
siamo in regime lineare e quindi posso applicare una tensione tale che la corrente risulti
Vin
essere più piccola, perché il rapporto
risulta essere sempre pari alla Z&cc . Questo
Iin
perché la macchina in questa situazione ha un comportamento veramente lineare. Questo
mi consente di affermare che la prova in cortocircuito la posso fare ad una tensione più
bassa ed a una corrente più bassa. Ma uno potrebbe dire che noi avevamo il nostro nucleo
ferro magnetico non lineare e abbiamo avuto tanti problemi, ma in queste condizioni le non
linearità del nucleo ferromagnetico vengono cancellate, perché alla chiusura del
cortocircuito corrisponde una corrente di reazione il cui scopo è solo quello di ridurre il
54
flusso all'interno del nucleo ferromagnetico e questo è ancora più evidente da questo
partito di tensione. Se vedete queste due impedenze, che sono circa uguali, la tensione V 1
applicata risulta essere ripartita metà su una e per metà sull'altra. Quindi la tensione che
viene indotta sulla reattanza di magnetizzazione è la metà di quella che si stabilisce in
condizioni operative nominali, quindi se è metà la tensione sarà anche più piccola la
corrente magnetizzante. Quindi l'effetto smagnetizzante è proprio evidente. Visto che si
smagnetizza la macchina, possiamo tranquillamente ritenere che il suo comportamento
possa essere tranquillamente considerato lineare in cortocircuito, quindi non risente della
non linearità del nucleo ferromagnetico.
Per questo motivo, per la più forte linearità della macchina in cortocircuito si ha che, la
prova in cortocircuito può essere condotta ad una tensione e una corrente che sono più
basse senza inficiare la qualità della misura. Detto questo la prova viene svolta in modo
tale da non sollecitare in maniera esagerata gli avvolgimenti ma anzi da sollecitarli alle
condizioni operative, perché la corrente che si fa circolare è quella relativa alle condizioni
di funzionamento nominale e la tensione sarà ovviamente quella per cui la corrente
circolante in cortocircuito risulti essere proprio pari alla corrente nominale. Il primo
problema da porre è dove alimentare il trasformatore, il lato bassa o alta tensione? Il
discorso è praticamente invertito rispetto alla prova a vuoto, siccome dobbiamo regolare la
tensione in modo tale che la corrente risulti essere pari alla corrente nominale e siccome la
tensione di cortocircuito che corrisponde alle cadute di tensione sull'impedenza di
dispersione è generalmente bassa, noi dovremmo avere la possibilità di regolare con
facilità una tensione che risulta essere relativamente bassa. Quindi dobbiamo disporci sul
lato in cui si possono ottenere valori assoluti della tensione che risultano essere più elevati
nelle condizioni di cortocircuito e dove le correnti sono più basse, perché dobbiamo
misurarle direttamente. Questo ci vincola immediatamente il lato su cui eseguire la misura,
cioè il lato in alta tensione. Quindi andiamo a disporre gli strumenti di misura nel seguente
modo, insieme ad un dispositivo, nominato variac, che ci consente di variare la tensione in
maniera continua (è un partito induttivo a contatti striscianti):
Facendo variare il numero di spire del variac aumentiamo la tensione e controlliamo
l'amperometro. Quando l'amperometro mi dà l'indicazione della corrente nominale
blocchiamo l'incremento della tensione e andiamo a vedere qual è il valore di tale tensione,
questa sarà la tensione di cortocircuito. Andiamo a leggere la misura sul wattmetro è
questa sarà la potenza di cortocircuito. A questo punto abbiamo la Vcc e la Pcc , le
riportiamo nella forma in P.U, le moltiplichiamo per 100 e otteniamo la Vcc% e la Pcc% .
Questi due valori fanno riferimento ad una configurazione circuitale del trasformatore che
risulta essere la seguente:
55
Non è presente l'impedenza di magnetizzazione perché abbiamo dimostrato che l'effetto
dell'impedenza di magnetizzazione su questa prova risulta essere del tutto nullo o meglio
trascurabile. Qui possiamo rappresentarla nella sua veste linearizzata. Quindi l'impedenza
che vediamo del trasformatore è l'impedenza definita di cortocircuito che è pari:
Z&cc = ( R& d 1 + R& d 2) + j ( X&d 1 + X&d 2)
La nostra impedenza di cortocircuito risulta essere costituita da un modulo e da una fase,
perciò:
Z&cc = Zcc ⋅ e jφcc
Vediamo di calcolarla dalle prove che abbiamo fatto, noi abbiamo la tensione di
cortocircuito espressa in percentuale andiamo a esprimerla in P.U perché è più comodo:
Vcc PU =
Vcc
Vn
L'impedenza di cortocircuito risulta essere uguale, in modulo, al rapporto tra i valori efficaci
della tensione di cortocircuito e la corrente nominale. Per passare al suo valore in P.U.
bisogna dividere per la Zb :
Vcc
Z&cc =
In
Vcc
Vcc
Z&cc PU =
=
= Vcc PU
In ⋅ Zb Vn
Quindi dall'indicazione della tensione di cortocircuito in forma percentuale e informa in P.U
immediatamente ci dà il valore del modulo dell'impedenza di cortocircuito. La potenza di
cortocircuito risulta essere esattamente pari a:
P cc = V cc ⋅ I n ⋅ cos φ cc
Pcc Vcc ⋅ In ⋅ cos φcc
=
= Vcc PU ⋅ cos φcc
An
Vn ⋅ In
Pcc PU
ar cos φcc = ar cos PU = φcc
Vcc
Pcc PU =
Vediamo immediatamente come i due parametri relativi alla prova in cortocircuito mi
definiscono in modulo e fase l'impedenza di cortocircuito in P.U e la corrente I 0 e la
potenza P 0 mi definiscono in modulo e fase l'impedenza di magnetizzazione. Quindi le
due prove mi definiscono in maniera completa il circuito equivalente del nostro
trasformatore, sia in forma assoluta sia in forma relativa. Adesso abbiamo visto come
definire il trasformatore in forma percentuale e relativa, come viene caratterizzato in termini
di potenza e tensione, l'abbiamo insomma caratterizzato completamente. Ci rimane da
56
analizzarlo da un punto di vista funzionale. Fino adesso lo abbiamo prima modellizzato e
poi analizzato fisicamente e poi caratterizzato, cioè abbiamo definito quelle che sono le
grandezze caratteristiche del nostro trasformatore in modo tale da poter ricavare il circuito
equivalente. Adesso ci interessa analizzarlo dal punto di vista funzionale, cioè vedere
come funziona nelle sue condizioni operative, cioè sotto carico. Partiamo innanzitutto
dall'analisi dei circuito equivalente e vediamo cosa succede quando variamo le condizioni
di funzionamento sotto carico. Questa è la rappresentazione circuitale che abbiamo fino a
adesso utilizzato:
Potremmo ancora continuare a impiegare questa rappresentazione senza commettere
alcun errore, l'unico problema che abbiamo nell'utilizzare questa rappresentazione e che
un po' pesante dal punto di vista della risoluzione circuitale. Dobbiamo quindi trovare
qualche rappresentazione equivalente che sia più facile da analizzare, e ci consente di
associare immediatamente i dati di targa predeterminati con la rappresentazione circuitale.
Rappresentazione semplificata del trasformatore
Dopo tutto il nostro studio abbiamo determinato il modello matematico e circuitale del
trasformatore reale. Siamo arrivati a questa rappresentazione:
Xd
I1
1
R1
Ia
V1
R0
I
I2
I
Xd
I
2
R2
Im
Iµ
X0
I
V2
cioè un doppio bipolo in configurazione dissimmetrica in particolare il sistema è costituito
da due impedenze, l'impedenza di dispersione primaria Xd1+R1 l'impedenza di dispersione
secondaria X dI 2 + R I2 e una impedenza di magnetizzazione R0 in parallelo con X0. Nel
circuito equivalente che qui ho rappresentato, il modello matematico che lo descrive è una
57
rappresentazione del trasformatore che tende a rappresentare completamente tutti i
fenomeni fisici che sono associati alla nostra macchina. Ora, nelle applicazioni pratiche si
tende ad utilizzare delle rappresentazioni circuitali del trasformatore e delle
rappresentazioni modellistiche matematiche più semplici, questo perché le
approssimazioni che vengono introdotte sono di scarsa rilevanza ai fini pratici, mentre le
semplificazioni che vengono ottenute sono notevoli. La prima semplificazione o il primo
modello semplificato è quello che si ottiene riportando il ramo magnetizzante a monte
dell'impedenza di dispersione, il circuito equivalente a cui si perviene è il seguente:
X d1
I1
V1
Ia
Iµ
R0
X0
I
R1
I2
I
X d2
I
R2
I
V2
Abbiamo il nostro campo magnetizzante, che conserva dal punto di vista parametrico gli
stessi valori, e poi abbiamo l'impedenza di dispersione primaria Xd1+R1, e l'impedenza di
dispersione secondaria X dI 2 + R I2 . Quale è la differenza tra questi due circuiti?
Xd
I1
1
R1
Ia
V1
R0
I
I2
I
Xd
2
I
R2
X d1
I1
Im
Iµ
X0
Ia
Iµ
R0
X0
R1
I
I2
I
X d2
I
R2
I
V2
V1
I
V2
La differenza sostanziale è data dall'aver riportato la nostra impedenza di dispersione a
valle dell'impedenza di magnetizzazione, questo porta sicuramente a degli errori nella
valutazione delle grandezze elettriche della macchina. Vediamo se l'errore che
commettiamo risulta essere ingegneristicamente accettabile.
'
I 1 = Im + I 2
In entrambe le rappresentazioni la corrente I 1 risulta essere uguale a:
Nella rappresentazione che abbiamo fin qui usato, la tensione di alimentazione V 1 risulta
essere uguale a: V 1 = Z&d 1 ⋅ I 1 − E1 , mentre nella rappresentazione semplificata la tensione
V 1 è pari a: V 1 = − E1
Tra le due rappresentazioni perciò, stiamo introducendo un errore perché introduciamo
un'approssimazione. Dobbiamo vedere quale risulta essere l'effetto di questa
approssimazione dal punto di vista funzionale, cioè dal punto di vista della tensione in
uscita e della corrente in uscita.
Da un punto di vista della corrente in uscita abbiamo che l'errore che commettiamo è sulla
corrente magnetizzante, perché nella prima rappresentazione la corrente magnetizzante è
V 1 − Z&d 1 ⋅ I 1
V1
uguale a: Im =
Mentre in questa semplificata è pari a:
Im =
Z& 0
Z& 0
58
Sappiamo che le impedenze di dispersione, anche in condizioni di funzionamento
nominale, sono dell'ordine del 2- 5% dell'impedenza di base, perciò questa caduta di
tensione sarà, in condizioni nominali, il 2-5% della tensione nominale, l'impedenza
magnetizzante è molto alta 50-1000 volte l'impedenza base. Perciò un errore del 2- 5%
sulla caduta di tensione rispetto ad un'impedenza Z& 0 che risulta essere così elevata,
introducono un errore sulla corrente magnetizzante che risulta essere praticamente
trascurabile, dell'ordine del 1-2 ‰. Quindi possiamo tranquillamente considerare questa
approssimazione in termini di corrente magnetizzante praticamente accettabile, non
commettiamo degli errori ingegneristicamente rilevanti. Quindi diciamo che in termini di
corrente Im è accettabile, e se lo è Im e anche accettabile in termini di corrente in uscita,
perché commettiamo anche un errore sulla corrente in uscita che risulta essere
accettabile.
Andiamo a vedere in termini di caduta di tensione, perché si introducono anche gli errori
sulle cadute di tensione. Confrontando le cadute di tensione nelle due rappresentazioni
'
otteniamo in un primo caso che: Vzd 1 = Z&d 1 ⋅ I 1 mentre nell'altro caso: Vzd 1 = Z&d 1 ⋅ I 2
L'errore che commetto risulta essere pari a: ∆V = Z&d 1 ⋅ Im
Z&d 1 risulta essere del 2-5% dell'impedenza base, Im risulta essere dell'ordine 1- 2% della
corrente nominale, l'errore che commettiamo risulta essere dell'ordine del 1 ‰ della
tensione applicata. Quindi diciamo che l'errore che commettiamo è trascurabile rispetto
alla tensione che andiamo ad applicare, stiamo commettendo un errore che risulta essere
neanche valutabile mediante gli strumenti di misura. In conclusione, l'errore sulla caduta di
tensione nel passare alla rappresentazione semplificata è dovuta alla mancata valutazione
dell'effetto della corrente magnetizzante e l'errore della corrente magnetizzante risulta
essere semplicemente un errore dovuto ad una sovrastima della tensione indotta, che
risulta essere paragonabile alla caduta di tensione sull'impedenza di dispersione primaria.
Quindi gli errori che introduciamo in termini di corrente e tensione sono così piccoli, da
poter considerare queste due rappresentazioni equivalenti dal punto di vista del calcolo e
questa risulta essere una rappresentazione molto più semplice da analizzare, viene
direttamente associata ai dati di targa perché direttamente vediamo che l'impedenza di
magnetizzazione e l'impedenza di cortocircuito sono automaticamente identificate.
Diciamo che questa rappresentazione semplificata non rappresenta effettivamente quale è
il comportamento del trasformatore, ma ci consente di valutare in maniera abbastanza
attendibile le grandezze che effettivamente sono presenti nel nostro trasformatore, inoltre
la semplificazione a cui arriviamo è notevole infatti il modello matematico assume la
seguente rappresentazione:
I
V1 = Z CC
⋅ I I2 + V2I
Per quanto riguarda il legame delle tensioni tra le grandezze primarie e secondarie si ha
una legame diretto, la tensione V1 è uguale all'impedenza di cortocircuito relativa
all'avvolgimento primario moltiplicato il valore della corrente I I2 più la tensione V2I . Come
potete immediatamente notare il legame tra la tensione primaria V1 e la tensione
secondaria è immediato noto il valore della corrente I I2 .
L'altra relazione che ci consente di ricavare la corrente magnetizzante è immediata:
Im =
V1
Zm
Il valore della corrente magnetizzante sarà semplicemente uguale alla tensione V1 diviso il
valore dell'impedenza di magnetizzazione Zm.
59
Ed infine la relazione che lega la corrente I1 con I I2 e la corrente Im che è sempre la solita:
I1 = I m + I I2
Il modello matematico ha assunto una forma notevolmente più semplice e questo lo
possiamo dedurre anche abbastanza agevolmente dalla rappresentazione del diagramma
vettoriale. Andiamo infatti a tracciare il diagramma vettoriale del nostro trasformatore nella
rappresentazione semplificata. Ipotizziamo, di collegare sul secondario il carico generico,
di conoscere il valore della potenza attiva e reattiva assorbita dal carico; mediante il
modello si può ricavare immediatamente quale è il legame esistente tra la nostra tensione
V2I e il valore della corrente sul secondario I I2 . Quindi ipotizziamo di conoscere sia la
tensione V1 sia il valore della corrente I I2 , in modulo e fase rispetto alla tensione V1,
V1
I 2I
a questo punto dalla prima equazione:
I
V1 = Z CC
⋅ I I2 + V2I
60
I
J X cc I 2
I
R cc I 2
V1
I
V2
I 2I
si ricava immediatamente il valore della tensione V2I .
Im =
V1
Zm
Dalla seconda relazione
si ricava immediatamente quale è la corrente
magnetizzante Im , in modulo e fase: (essendo Zm ohmico induttiva avrò Im in ritardo su V1):
I
J X cc I 2
I
R cc I 2
V1
I
V2
Im
I
I2
Andiamo ad osservare meglio la rappresentazione della corrente nell'impedenza
magnetizzante:
61
Xd
I1
Ia
V1
R1
1
I
I2
I
Xd
I
R2
2
Im
Iµ
R0
I
V2
X0
La corrente magnetizzante Im sarà composta da una componente attiva Ia e una corrente
magnetizzante Iµ, la componente attiva Ia sarà in fase con la tensione la componente
magnetizzante Iµ, sarà in quadratura e in ritardo di 90 gradi:
I
J X cc I 2
I
R cc I 2
V1
I
V2
Ia
Im
Ia
Im
I
I2
I 2I
Iµ
Iµ
Quindi avremo una componente Ia e una componente Iµ, che ci formeranno la nostra Im.
Andando a combinare la Im con la I I2 si ricava il valore della corrente I1.
62
I
J X cc I 2
I
R cc I 2
V1
I
V2
Im
Im
I1
I
I2
Come potete notare il diagramma vettoriale a cui siamo pervenuti è estremamente più
semplice rispetto a quello che avevamo determinato nel caso di un trasformatore nella sua
rappresentazione completa.
In alcune applicazioni soprattutto in quelle in cui vi sono correnti e tensioni estremamente
elevate e nelle quali i flussi di potenza sono estremamente grandi, la rappresentazione che
si utilizza per il trasformatore è ulteriormente semplificata, infatti per i trasformatori di
grossa potenza in alta tensione le correnti magnetizzanti assumono dei valori talmente
piccoli che possono essere in prima approssimazione completamente trascurate e quindi il
circuito equivalente che si utilizza in questi casi è addirittura il seguente:
I
1
V
1
Z CC
I
V
2
è un quadripolo rappresentato esclusivamente dall'impedenza di cortocircuito Zcc,
l'impedenza di magnetizzazione viene completamente eliminata proprio perché l'effetto
della corrente magnetizzante sulla corrente I1 è praticamente nullo.
Vi è un'altra motivazione per la quale si preferisce utilizzare questa rappresentazione,
infatti in questo caso sono immediatamente deducibili i valori dei parametri semplicemente
dalle prove a vuoto e dalle prove in cortocircuito, quindi dai dati di targa che vengono
indicati sul trasformatore. Quindi tramite l'indicazione della tensione di cortocircuito, delle
cos(ϕcc), è possibile immediatamente ricavare l'impedenza di cortocircuito Zcc, mentre
tramite l'indicazione della P0 e del cos(ϕ0) è possibile immediatamente ricavare la Z0.
63
Questo evita di effettuare quelle operazioni di divisione dell'impedenza di cortocircuito in
due per ipotizzare che il nostro trasformatore sia un T simmetrico, questa
rappresentazione è più corrispondente a quelle che sono le indicazioni che vengono fornite
dal costruttore.
Caduta di tensione dal passaggio dal funzionamento a vuoto a carico
Ora, vista quale è l'analisi del nostro trasformatore, quali sono le possibili rappresentazioni
del nostro trasformatore, vediamo di valutare quali sono le possibili condizioni di
funzionamento del trasformatore. Uno degli elementi sui quali focalizzeremo l'attenzione è
la caduta di tensione nel passaggio dal funzionamento a vuoto al funzionamento
sottocarico. L'effetto della caduta di tensione nel passaggio dal funzionamento a vuoto al
funzionamento sottocarico e facilmente analizzabile proprio da questo circuito equivalente:
Z CC
I1
V1
Zm
I
V2
L'analisi del circuito equivalente del trasformatore semplificato, mette in evidenza che
nell'ipotesi di corrente di carico nulla, quindi nelle ipotesi di funzionamento a vuoto quando
I I2 è uguale a zero. Il valore della tensione V1 e il valore della tensione V2I coincidono
perfettamente, al variare del carico varia il valore efficace della corrente I I2 ,
conseguentemente abbiamo una variazione della caduta di tensione sull'impedenza di
dispersione, quindi abbiamo una variazione della tensione presente sul secondario.
Questa variazione di tensione è una variazione in modulo e in fase, quindi a seconda delle
condizioni di carico presenti sul secondario, quindi dei fattori di potenza e di correnti
assorbite in valore efficace, l'entità della caduta di tensione presente sul secondario potrà
essere differente. Questo è un elemento negativo per il trasformatore perché in generale
noi vogliamo una macchina che esegua si una conversione dell' energia, ma che
garantisca le stesse condizioni che avevamo in ingresso, quindi tensione costante e
frequenza costante. Qui otteniamo in uscita una frequenza che sarà sempre la stessa 50
Hertz ma una tensione che viene modulata in funzione del tipo di carico che stiamo
alimentando quindi al variare del carico varia pure la tensione di alimentazione, questa
ovviamente è una condizione che per alcuni tipi di carico non dà nessun problema, per altri
tipi di carico invece può creare dei problemi, quindi in certi tipi di trasformatori vengono
predisposte delle soluzioni tecnologiche che consentano di limitare o addirittura annullare
questa caduta di tensione.
Per cercare di limitare la caduta di tensione si potrebbe rendere l'impedenza di
cortocircuito la più piccola possibile, cerco di annullarla. Questa soluzione oltre ad essere
troppo costosa, perché dovrei realizzare gli avvolgimenti con resistenze molto piccole, mi
64
porta ad un altro problema che in condizioni di cortocircuito avrei che l'unica impedenza
che ostacola la circolazione della corrente di cortocircuito è l'impedenza di cortocircuito.
Z CC
I1
V1
Quindi se l'impedenza di cortocircuito è troppo piccola i valori delle correnti di cortocircuito
assumono delle intensità enormi, producendo conseguentemente degli sforzi sia termici
che meccanici notevoli, queste potrebbero danneggiare molto più facilmente la macchina.
Quindi è vero che devo cercare di ridurre l'impedenza di cortocircuito, ma non posso
ridurla troppo perché ho delle limitazioni imposte proprio dalla costruzione della struttura
della macchina.
Allora per ovviare alle variazioni di tensione che si verificano nella macchina si utilizzano in
generale dei trasformatori chiamati multipresa, i trasformatori multipresa, sono dei
trasformatori che presentano un rapporto spire variabile quindi un numero di spire al
secondario che può essere variato. Questi trasformatori possono variare il rapporto di
trasformazione in maniera automatica o in maniera statica. Se conosco il mio carico posso
definire quale sarà la caduta di tensione e quindi correggere preventivamente la caduta
mediante un aumento o una diminuzione del rapporto di trasformazione. In altri casi invece
la variazione del numero di spire viene effettuata automaticamente cioè c'è riservo
meccanismo che misura la tensione morsetti in base a un set point a un riferimento, adatta
il numero delle spire maniera tale da tenere costante la tensione. Capite immediatamente
che inserire all'interno del trasformatore un dispositivo di questo genere significa
aumentare i costi, quindi un dispositivo di questo genere va utilizzato solo quando il carico
che dobbiamo alimentare richiede condizioni di tensione in uscita che devono essere
perfettamente costanti.
Fatte queste premesse che sono di carattere generale, andiamo a determinare innanzitutto
le metodologie di scelta del trasformatore e poi valutare analiticamente la caduta di
tensione sul trasformatore.
Innanzitutto vediamo come si sceglie un trasformatore.
Sappiamo che il trasformatore è un dispositivo che ha lo scopo di eseguire una
conversione dell'energia in modo tale da modificare lo stato elettrico, quindi variare la
tensione e la corrente. Ora però lo scopo principale del trasformatore è quello di
alimentare un carico, quindi di adattare lo stato elettrico al carico che dovremo alimentare.
Quindi il trasformatore va scelto principalmente sulla base del tipo di carico che dobbiamo
andare ad alimentare. Innanzitutto dovremmo andare a vedere nel nostro carico quale è la
tensione di esercizio, quindi la sua tensione nominale, sulla base della tensione nominale
del carico e della tensione presente sulla linea alla quale dovremo allacciarci,
determiniamo il rapporto di trasformazione. Il nostro carico assorbirà una certa potenza
attiva e reattiva, si definisce in prima approssimazione quella che è la potenza apparente
nominale che deve essere erogata sul carico, questo carico potrà avere un'evoluzione
temporale non continua ma una evoluzione variabile, quindi in base a una analisi di tipo
termico sappiamo quale può essere la potenza nominale del carico, perché dovremmo
sempre tener conto che la potenza del trasformatore può essere inferiore alla potenza di
65
picco richiesta del mio carico. Quindi sulla base del carico definiamo innanzitutto la
tensione e il rapporto di trasformazione e poi sull'andamento della potenza quindi sul
diagramma di carico individuiamo la potenza nominale del trasformatore che dovremo
andare ad inserire. Ora, c'è un ultimo problema, quello di andare ad analizzare quale è la
sensibilità del nostro carico alle oscillazioni di tensione. Per qualsiasi apparecchio
utilizzatore elettrico, la tensione nominale viene riportata con un valore di oscillazione della
tensione nominale (più o meno un 5%, 10% oppure in certi casi viene semplicemente
indicato il valore di tensione). Questo significa che il carico funziona in condizioni
accettabili esclusivamente se la tensione oscilla all'interno di quella banda, se non viene
garantita o indicata alcuna oscillazione vuol dire che la tensione di alimentazione deve
essere perfettamente costante. Quindi, le caratteristiche del carico possono essere o no
influenzate dall'oscillazione di tensione, quindi in funzione dell'indicazione che ci viene
fornita dal carico noi dovremmo utilizzare le contromisure per controbilanciare le eventuali
presenze di oscillazioni di tensione presenti in uscita dal trasformatore. Per quanto
riguarda i primi due parametri, ( tensione di alimentazione del carico, potenza richiesta)
tensione, potenza, sono parametri che vengono definiti una volta per tutte, per quanto
riguarda invece le caratteristiche della tensione dell'oscillazione di tensione, queste mi
individuano il tipo di trasformatore che possiamo collegare, ad esempio se il mio
trasformatore non è sensibile alle oscillazioni di tensione io non mi preoccuperò
minimamente di metterci un multipresa, un dispositivo multipresa o un dispositivo con
regolazione automatica della tensione, metterò semplicemente un trasformatore ed
accetterò delle oscillazioni di tensione all'interno del mio sistema basta che queste non
superino le specifiche che mi vengono indicate dall'utilizzatore. Se invece il mio carico mi
indica che la tensione deve rimanere costante, io dovrò andare valutare quale è
l'oscillazione di tensione prodotta dal trasformatore, e adottare le contromisure per
mantenere la tensione costante.
Ora, vista la sensibilità di alcuni carichi alle cadute di tensione vediamo di analizzare e di
valutare analiticamente quale è la caduta di tensione presente sul trasformatore,
procediamo in maniera rigorosa e prima di utilizzare metodi approssimativi vediamo di
analizzare i metodi che ci vengono forniti dal modello rigoroso del trasformatore. Facciamo
un'ipotesi di studio:
66
Determiniamo il modello matematico del trasformatore e vediamo di calcolare il valore
della tensione presente sul secondario, sia a carico che quando è nullo il carico sul
secondario. Ora capite bene che per poter determinare la tensione sul secondario
bisognerà fare una serie di calcoli che si basano essenzialmente sulla determinazione
dell'impedenza di ingresso del trasformatore.
Il trasformatore nella sua rappresentazione a T simmetrico viene collegato ad una
impedenza Z Iu , impedenza di carico:
I
Z1
I1
V1
Z2
Z0
I
ZU
67
Si effettua una trasformazione successiva fino a quando non si ricava quella che è
l'impedenza di ingresso vista dal lato primario.
Z in = Z 1 +
Z 0 ⋅ Z 2' + Z u'
Z 0 + Z 2' + Z u'
(
(
)
)
Nota l'impedenza di ingresso il valore della corrente assorbita I1 sarà dato da:
I1 =
V1
Z in
Nota la corrente I1, è immediatamente possibile ricavare la corrente I I2 , semplicemente
sottraendo alla I1 il valore della corrente magnetizzante Im, sviluppando i calcoli e ricavo il
valore della corrente I I2
I I2 = I1 − I m =
V1 − E 1
−
Z in
Z0
Z
V1 − 1
V
− E 1 V1 V1 − Z1 ⋅ I1 V1
Z in
I I2 = I1 − I m = 1 −
=
−
=
−
Z in
Z0
Z in
Z0
Z in
Z0
⋅ V1
Z −Z +Z
II2 = V1 ⋅ o in 1
Zin ⋅ Z0
Una volta determinata la corrente I I2 , mediante il modello matematico del trasformatore è
immediato ricavare il valore della tensione presente sul secondario, come vedete [Lucido]:
68
Una volta determinato il valore della tensione presente sul secondario andiamo a
determinare la caduta di tensione nel passaggio dal funzionamento a vuoto al
funzionamento sottocarico. La caduta di tensione forma relativa è espressa come la
differenza tra il modulo della tensione presente a vuoto meno il modulo della tensione
presente sotto carico diviso il valore della tensione a vuoto.
∆V =
V20 − V2
V20
= 1−
V2
V20
I valori delle tensioni V2 e V20 li abbiamo già calcolati, quindi abbiamo determinato in
maniera rigorosa quale è l'espressione che ci consente di determinare la caduta di
tensione relativa nel passaggio dal funzionamento vuoto al funzionamento sottocarico.
Come potete immediatamente notare la determinazione della caduta di tensione mediante
l'utilizzo di questa relazione:
∆V = 1 −
V
V
2
20
non è una cosa immediata, cioè bisogna impostare questa equazione
69
Z ⋅ (Z in − Z1 ) − Z I2 ⋅ (Z 0 − Z in + Z1 )
⋅ (Z 0 + Z1 )
∆V = 1 − 0
Z in ⋅ Z 02
Quindi l'utilizzo di espressioni di questo genere non è consigliabile perché si può incorrere
molto facilmente in degli errori. Allora piuttosto che utilizzare delle procedure di tipo
rigoroso vediamo cosa succede se invece che seguire il modello matematico rigoroso
utilizziamo il modello matematico semplificato che abbiamo appena studiato. Quindi
andiamo a considerare il nostro circuito equivalente semplificato:
I
Z1
I1
V1
Z2
I
Z0
ZU
Seguiamo esattamente la stessa procedura di calcolo per la determinazione della caduta
di tensione in forma relativa.
∆V =
V20 − V2
V20
= 1−
V2
V20
≅ 1−
Z Iu
Z Iu + Z
(
)
assume una forma notevolmente più semplice rispetto a quella precedente,
Z ⋅ (Z in − Z1 ) − Z I2 ⋅ (Z 0 − Z in + Z1 )
⋅ (Z 0 + Z1 )
∆V = 1 − 0
Z in ⋅ Z 02
Come si può immediatamente notare la semplificazione cui siamo giunti è notevole e la
possibilità di commettere errori viene notevolmente ridotta. Ora, però nasce un problema, il
problema che per determinare la caduta di tensione mediante questa procedura:
∆V =
V20 − V2
V20
= 1−
V2
V20
≅ 1−
Z Iu
(Z + Z)
I
u
si ha la necessità di conoscere il valore dell'impedenza di carico Z IU . Di solito i carichi non
vengono forniti in termini di impedenza ma vengono forniti in termini di potenza attiva e
reattiva che essi assorbono. Quindi la rappresentazione che abbiamo non viene quasi mai
utilizzata, si preferisce utilizzare una procedura non analitica, ma una procedura che deriva
da un'analisi di tipo grafico.
Analisi grafica
70
La procedura grafica si basa essenzialmente sull'analisi dell’equazione di equilibrio
elettrico sulla maglia più esterna, infatti sappiamo che analizzando il circuito equivalente
del trasformatore abbiamo che la tensione presente sul primario è pari alla caduta di
tensione sull'impedenza di cortocircuito più la tensione presente sul secondario:
V1 = Z ⋅ I 2I + Z UI ⋅ I 2I
Andiamo ad analizzare quale è il diagramma vettoriale rappresentante i vettori in forma
simbolica relativo a quella relazione. Allora ipotizziamo di conoscere sia la tensione V2I sia
la corrente I I2 , ed ipotizziamo che la corrente sia in ritardo rispetto sulla tensione, quindi
che il carico sia un carico ohmico induttivo, andando ad applicare l'equazione di equilibrio
elettrico avremo:
V2I + R CC ⋅ I I2 + jX CC ⋅ I I2 = V1
questa è la nostra rappresentazione:
V1
JXcc I 2
I
A
O
V2
I
2
2
I2
I
Rcc I 2
I
90°-ϕ
90°
2
Vogliamo ricavare la caduta di tensione la ∆V in forma relativa, abbiamo detto che ∆V in
forma relativa o anche in per unit, è pari alla differenza fra il valore della tensione nelle
condizioni di funzionamento a vuoto V20 meno il valore della tensione V2 sotto carico diviso
il valore della tensione V20 a vuoto:
∆V =
V 20 − V 2
V 20
noi sappiamo bene dalle operazioni di riporto che il modulo della tensione V20 riportato al
primario è esattamente uguale alla tensione V1, per le relazioni di riporto dal secondario al
primario che abbiamo visto nelle lezioni precedenti. Quindi se esprimiamo la ∆Vpu in per
unit non rispetto alle grandezze secondarie ma rispetto alle grandezze primarie questa
relazione:
∆ Vpu =
V20 − V2
V20
assume la forma:
71
∆ V pu =
V 1 − V 2I
V1
quindi da questo diagramma è immediato ricavare il valore della caduta di tensione in
forma relativa, basta semplicemente considerare la retta d'azione nella quale giace il
nostro vettore V2I , e proiettare il vettore V1 con un arco di circonferenza centrato in O fino
a quando questo non interseca la retta di azione del vettore V2I . Il segmento OE, non sarà
nient'altro che il nostro vettore V1. L'ampiezza è la stessa, quindi il modulo V1 meno il
modulo di V2I è pari al segmento AE.
V1
JXcc I 2
I
A
O
V2
I
2
2
I2
I
Rcc I 2
I
E
90°-ϕ
90
2
La differenza di tensione nel passaggio dal funzionamento a vuoto al funzionamento sotto
carico è rappresentata dal segmento AE. Una volta individuata la costruzione grafica basta
semplicemente determinare analiticamente qual’è il valore di AE, questo è molto semplice
facendo delle considerazioni di carattere geometrico. Innanzitutto si nota che ϕ2 è il fattore
di carico:
B
2
V1
JXcc I 2
I
D
A
O
I2
I
2
E
V2
I
2
90°-ϕ
2
C
Rcc I 2
I
Se consideriamo la retta ortogonale alla retta d'azione spiccata per il punto B, avremo che
l'angolo formato dal segmento Xcc I I2 e CD è proprio ϕ2. Quindi automaticamente si può
determinare quale è la lunghezza AE come la somma del segmento AD del segmento DC
e del segmento CE.
Il segmento AD è la proiezione di Rcc I I2 sulla retta d'azione, quindi è pari a:
AD = R CC ⋅ I I2 ⋅ cos(ϕ 2 )
72
Il segmento DC, è la proiezione del segmento Xcc I I2 sulla retta d'azione moltiplicato il seno
di ϕ2 il fattore di carico.
DC = ⋅X CC ⋅ I I2 ⋅ sen (ϕ 2 )
Rimane il segmento CE questo non è altro che il segmento OE-OC, allora:
OE = V1
Il segmento OC è pari a:
2
(
2
)
OC = V1 − X ⋅ I 2I ⋅ cos(ϕ 2 ) − R ⋅ I 2I ⋅ sin (ϕ 2 )
Abbiamo ricavato i singoli termini che mi costituiscono la caduta di tensione ∆V, basta
semplicemente andare a sostituire. L'espressione a cui si perviene è la seguente:
∆VPU =
V1 −
2
2
(
)
V1 − X ⋅ I I2 ⋅ cos(ϕ) − R ⋅ I I2 ⋅ sin (ϕ) + I I2 ⋅ (R ⋅ cos(ϕ) − X ⋅ sin(ϕ) )
V1
Questa è la forma rigorosa e c'è il segno di uguale, proprio perché abbiamo sommato tutti
singoli termini AB, DC, CE, vediamo però se si può cercare di semplificare questa
relazione che è sempre una relazione abbastanza complicata, andando ad analizzare il
nostro diagramma vettoriale:
B
2
V1
JXcc I 2
I
D
A
O
E
V2
I
2
I2
I
90°-ϕ2
2
C
Rcc I 2
I
si vede chiaramente che se lo sfasamento tra V2I e V1 l'angolo ψ, è piccolo, nella realtà
abbiamo che l'ampiezza di CE, è praticamente trascurabile, questa condizione si verifica
quando la caduta di tensione sull'impedenza di cortocircuito è relativamente piccola
rispetto alla tensione di alimentazione, in generale si verifica per valori della corrente di
carico che vanno da 0 ad una corrente pari al 50% della corrente nominale. Per queste
variazioni di corrente potremmo ritenere che quest'angolo di sfasamento ψ, sia piccolo e
quindi si può trascurare il segmento CE. Ma trascurare il segmento CE vuol dire trascurare
il termine:
73
2
(
2
)
V1 − V1 − X ⋅ I 2I ⋅ cos(ϕ ) − R ⋅ I 2I ⋅ sin(ϕ )
La relazione assume una forma approssimata, ma notevolmente più semplice, infatti sotto
queste ipotesi la caduta di tensione dal passaggio da vuoto a carico è pari a :
∆VPU ≅
I I2 ⋅ (R ⋅ cos(ϕ) − X ⋅ sin(ϕ) )
V1
Questa relazione come potete immediatamente notare, lega grandezze espresse in forma
relativa con grandezze espresse in forma assoluta, si può ovviare a questo introducendo
dei semplici passaggi analitici, basta semplicemente moltiplicare il numeratore e il
denominatore per la corrente nominale I1n, e definire quelle che sono la resistenza di
cortocircuito in forma relativa:
R ⋅ I1n
εr =
V1
la reattanza di cortocircuito in forma relativa:
εX =
X ⋅ I1n
V1
corrente informa relativa:
I 2 pu =
I I2
I1n
l'espressione a cui si arriva è quella che utilizzeremo maggiormente nel calcolo della
caduta di tensione:
∆VPU ≅ [ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )]⋅ I 2 pu
Questa è la relazione che ci consente di valutare in forma approssimata quale è la caduta
di tensione in forma relativa.
Possiamo osservare due cose fondamentali: la caduta di tensione non solo dipende
dall'intensità della corrente al secondario, ma è strettamente legata anche al fattore di
potenza in uscita cioè allo sfasamento della corrente rispetto alla tensione in uscita.
Fin qui l'abbiamo analizzato non come fattore di potenza, non gli abbiamo ancora
assegnato un segno, gli abbiamo dato soltanto un valore che è il valore assoluto
dell'angolo compreso tra V2I e I I2 . Andiamo a fare una considerazione su quello che
succede nel nostro sistema quando prendiamo esattamente la stessa corrente, con lo
stesso angolo in modulo però lo consideriamo anziché positivo negativo, quindi
disponiamo di una condizione di carico non più ohmico induttivo, ma di carico ohmico
capacitivo con lo stesso angolo ϕ2, andiamo a tracciare lo stesso diagramma e vediamo
che cosa succede:
74
JXcc I 2
I
V1
Rcc I 2
I
I2
I
O
A
2
2
V2
I
avremmo sempre il termine resistivo e il nostro termine reattivo. Osserviamo che a
seconda del segno che assegniamo a questo angolo ϕ2, la caduta di tensione può risultare
positiva oppure negativa, cioè possiamo avere nel caso in cui il carico è ohmico induttivo
che la tensione V2I è inferiore alla tensione V1, mentre quando il carico è ohmico capacitivo
con lo stesso fattore di potenza otteniamo che la tensione sul secondario è maggiore
rispetto alla tensione presente sul primario:
ohmico induttivo
ϕ2>0 V2I < V1
Ohmico capacitivo
ϕ2<0 ϕ 2 > ϕ * V2I > V1
JXcc I 2
I
V1
V1
A
O
V2
I
2
I2
JXcc I 2
I
2
I
I2
I
Rcc I 2
I
Rcc I 2
I
2
O
= *
A
2
V2
I
In definitiva nei trasformatori al variare delle condizioni di carico, in termini di corrente
assorbita e di fattore di potenza, i comportamenti delle tensioni di uscita sono molto
differenti.
Però come è possibile fisicamente che in un trasformatore applicando un carico ohmicocapacitivo si possa avere un incremento della tensione. La tensione d’uscita in un
trasformatore è prodotta dall’accoppiamento mutuo fra avvolgimento primario e secondario
e mi chiedo come mai con un carico capacitivo essa possa essere superiore di quella in
ingresso, sapendo che l’avvolgimento è una resistenza e quando è percorso da corrente
causa una caduta di tensione. Solo un aumento del flusso può aumentare la tensione in un
avvolgimento, se aumenta il flusso aumenta la magnetizzazione e per magnetizzare serve
potenza reattiva. Mettendo un condensatore come carico produciamo un flusso di potenza
reattiva dal condensatore verso il trasformatore, che è un dispositivo che preleva potenza
reattiva per magnetizzarsi. Se io applico una tensione di alimentazione e in più fornisco
75
potenza reattiva dal condensatore non faccio nient’altro che aumentare la
magnetizzazione del mio nucleo ferromagnetico. Quindi la cosiddetta corrente di reazione
dell’avvolgimento secondario fa in modo che i flussi di eccitazione, dovuti al primario, e di
reazione al secondario, siano concordi e vadano ad aumentare il flusso del trasformatore,
aumentando cosi la tensione in uscita. Si ha dunque una combinazione vettoriale dei flussi
del primario e del secondario.
Quindi definire il segno di questo angolo ϕ2, è importante nella nostra relazione per poter
capire come valutare e determinare in maniera esatta la caduta di tensione. Ora, (nel caso
ohmico capacitivo) la relazione che ci consente determinare approssimativamente la
caduta di tensione è sempre la stessa:
∆VPU ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 pu
quindi quando i carichi sono ohmico induttivi l'angolo ϕ2 è positivo, anche cos(ϕ2) e sin(ϕ2)
sono positivi, la situazione con la convenzione da noi adottata è questa:
V2
I
2
I2
I
quando i carichi sono ohmico capacitivi l'angolo ϕ2, è negativo la situazione con la
convenzione da noi adottata è questa:
I2
I
2
V2
I
Quindi, secondo questa convenzione il fattore di potenza non verrà modificato nel segno,
ma il sin(ϕ2) invece verrà alterato avrà il segno negativo e ci consentirà di definire la
caduta di tensione che sarà negativa.
Solitamente la caduta di tensione viene espressa in funzione della potenza richiesta dal
carico e dell’angolo di sfasamento tra corrente e tensione in uscita.
V'
∆VPU = 1 − 2 = 1 − V2' pu ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 pu mettendo in evidenza cos(ϕ 2 ) e
V1
moltiplicando entrambi i membri per V2' pu si ottiene:
sin (ϕ 2 ) '
⋅ V2 pu ⋅ I 2 pu ⋅ cos(ϕ 2 ) = (ε r + ε x ⋅ tg (ϕ 2 )) ⋅ P2 pu
V2' pu − V2' 2pu ≅ ε r + ε x ⋅
cos(ϕ 2 )
Si è ottenuto un equazione di secondo grado V2' pu − V2'2pu = (ε r + ε x ⋅ tg (ϕ 2 )) ⋅ P2 pu dalla
risoluzione matematica si otterranno due soluzioni, una puramente matematica ma di
nessun valore fisico, infatti ci darà un valore di V2' pu quasi nullo, questo è possibile solo se
il trasformatore è in cortocircuito, andremo quindi a scartarla. Mentre la seconda soluzione
che presenta un valore di V2' pu prossimo a 1 sarà la nostra effettiva soluzione. Il valore
76
della caduta di tensione, una volta a conoscenza di V2' pu è immediatamente ricavato
tramite la relazione 1 − V2' pu
∆VPU ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 pu
La relazione
come abbiamo già detto è una
relazione approssimata e abbiamo detto che è valida sino a quando il carico non supera
certi valori, quando abbiamo un aumento del carico oltre il 50% della corrente nominale
questo modello è troppo approssimato, quindi bisogna utilizzare un modello più preciso. Le
norme CEI hanno indicato una procedura per il calcolo della caduta di tensione nel caso di
valori della corrente sul secondario superiori al 50%
Vediamo come si procede. Per determinare, il segmento CE, si considera la tangente alla
circonferenza che presenta al centro in O e raggio V1 spiccata dal punto B:
B
2
V1
JXcc I 2
I
D
A
δ
O
V2
I
2
2
I2
I
90°-
2
K
C E
Rcc I 2
I
Quindi la tangente interseca la retta di azione nel punto che ho indicato con K. Si afferma
che il valore del segmento CE, che completa il nostro calcolo è all'incirca uguale a CK
diviso due:
CE =
CK
2
Il problema è quello di andare a valutare il valore di CK. Andiamo ad analizzare due
triangoli che sono il triangolo BCK e il triangolo BCO. Questi due triangoli sono entrambi
dei triangoli rettangoli e sono oltretutto simili, infatti presentano un lato in comune sono
entrambi retti e poi facendo delle considerazioni sugli angoli si ricava che questi due angoli
δ sono perfettamente uguali.
77
B
2
V1
δ
JXcc I 2
I
D
A
δ
O
V2
90°-
2
2
I2
I
2
K
C E
I
Rcc I 2
I
quindi se i due triangoli simili possiamo applicare una proporzione:
CK : BC = BC : OC
Mettendo in evidenza CK si ricava che:
CK =
[BC]2
OC
il segmento OC, vista la esiguità di CK, lo si considera praticamente uguale a V1.
Mentre per ottenere il segmento BC, basta semplicemente considerare due proiezioni la
proiezione del vettore Xcc⋅I2 sulla direzione ortogonale alla retta d'azione X CC ⋅ I 2 ⋅ cos(ϕ2 ) e
poi sottrargli la proiezione di R ⋅I sempre nella stessa direzione R CC ⋅ I 2 ⋅ sin (ϕ 2 )
cc 2
Quindi il segmento CK è uguale a:
CK ≅
(X ⋅ cos(ϕ 2 )) − (R ⋅ sen(ϕ 2 ))2 ⋅ I I2
2
V1
Moltiplicando e dividendo per le correnti nominali al quadrato, si può riportare questa
espressione nella forma relativa, ed otteniamo questa espressione:
2
CK ≅ (ε x cos(ϕ 2 ) − ε r sen (ϕ 2 )) ⋅ I 22 PU ⋅ V1
Ora applichiamo la relazione classica per il calcolo della ∆V, sostituendo a CK nella
relazione che definisce CE, sviluppando otteniamo l'espressione che ci consente di
ricavare informa un po' più precisa e secondo quanto indicato dalle norme CEI la caduta di
tensione in forma relativa:
∆VPU ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 PU +
(ε x ⋅ cos(ϕ 2 ) − ε r ⋅ sin (ϕ 2 ))2 ⋅ I 22 PU
2
78
Questa è l'espressione che è valida anche quando le correnti sono prossime alla corrente
nominale e prende il nome di caduta di tensione industriale quando il valore della corrente
circolante sul secondario è pari alla corrente nominale. Quindi quando I2 è pari a I2n, e
quando I2pu è pari a I1, l'espressione della caduta di tensione industriale è:
(ε x
∆ V PU ≅ (ε r ⋅ cos (ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) +
⋅ cos (ϕ 2 ) − ε r ⋅ sin (ϕ 2 ))
2
2
Anche questa espressione della caduta di tensione come quella semplificata può essere
espressa tramite la potenza fornita al carico.
1 − V2' PU − (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 PU =
Come prima, portiamo fuori cos(ϕ 2 )
V2' 2pu si ottiene:
(ε x ⋅ cos(ϕ 2 ) − ε r ⋅ sin (ϕ 2 ))2 ⋅ I 22PU
2
mentre ora moltiplichiamo entrambi i membri per
V2'2 PU − V2'3 PU − (ε r + ε x ⋅ tng (ϕ 2 )) ⋅ P2 PU ⋅V2' PU =
(ε x − ε r ⋅ tng (ϕ 2 ))2 ⋅ P22PU
2
Abbiamo ottenuto una equazione di terzo grado da cui si ottengono due soluzioni non
realistiche e quindi da scartare e una soluzione reale che ci permette di conoscere il valore
della V2' pu di conseguenza la mia caduta di tensione sarà pari a 1 − V2' pu
Caratteristiche esterne del trasformatore
Ora vediamo di analizzare quale è la forma che assume la caduta di tensione in funzione
del carico sia nella sua forma completa:
∆VPU ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 PU +
(ε x ⋅ cos(ϕ 2 ) − ε r ⋅ sin (ϕ 2 ))2 ⋅ I 22 PU
2
che nella sua forma semplificata:
∆VPU ≅ (ε r ⋅ cos(ϕ2 ) + ε x ⋅ sin(ϕ2 )) ⋅ I 2PU
La caduta di tensione è in funzione del fattore di potenza cos(ϕ2) e della corrente I2pu. Per
dare una rappresentazione della caduta di tensione potremmo in prima analisi imporre di
valutare quale è la caduta di tensione quando la corrente varia dal valore nullo al valore
nominale e il fattore di potenza è costante. Le caratteristiche così ottenute prendono il
nome di caratteristiche esterne del trasformatore. Quindi la caratteristica esterna del
trasformatore è quella caratteristica che si ottiene andando valutare la caduta di tensione
al variare della corrente secondaria (I2PU che varia da 0 a I2PU ) quando il fattore di potenza
è costante. Vediamo che forma assume la nostra caduta di tensione.
Se cos(ϕ2) è costante, le quantità cos(ϕ2) e sin(ϕ2) sono costanti, anche i valori εr e εx sono
costanti quindi posso indicare:
∆VPU ≅ (ε r ⋅ cos(ϕ2 ) + ε x ⋅ sin(ϕ2 )) ⋅ I 2PU
con:
79
∆ V PU ≅ a ⋅ I 2 PU
Questa è l’espressione di una retta. Se noi imponiamo un fattore di potenza costante
otteniamo l’equazione di una retta, nella quale il coefficiente angolare è espresso da
(ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) . Tracciando tutte le caratteristiche che mi esprimono la V2pu al
variare della I2pu, parametrizzando ciascuna di queste caratteristiche per il fattore di
potenza, otteniamo la famiglia delle caratteristiche esterne del trasformatore.
Abbiamo detto che l’evoluzione è di tipo lineare, quindi partendo dalla V20, unitaria, al
variare del fattore di potenza avremo una famiglia di rette con pendenza positiva o
negativa, questo asseconda del carico che si sta alimentando.
Ci interessa individuare la retta con pendenza uguale a zero, facilmente determinabile
perché la pendenza risulterà nulla, quindi V2' pu = 1 al variare della I’2, per questo caso
particolare si avrà una caduta di tensione nulla ∆VPU = 0
Quindi quale è la condizione per cui la caduta di tensione diventa nulla? Sicuramente non
certo perché la corrente I2PU diventa nulla:
∆VPU ≅ (ε r ⋅ cos (ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 PU
diventerà nulla quando il termine (ε r ⋅ cos (ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) diventa uguale a zero quindi :
ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 ) = ε r + ε x ⋅ tng (ϕ 2 ) = 0
εr
. Questo angolo lo chiamiamo φ*. Si vede che φ* è un angolo
ε
x
da cui Φ = arctg −
*
negativo per la quale la caduta di tensione risulta essere esattamente uguale a zero al
variare delle condizioni di carico.
80
ε
Φ* = arctg − r
εx
Questa condizione di fattore di potenza è una condizione relativa ad un carico di tipo
ohmico–capacitivo, infatti siamo in presenza di un angolo negativo.
Analizziamo ora l’espressione della caduta di tensione nella sua forma completa:
∆VPU ≅ (ε r ⋅ cos(ϕ 2 ) + ε x ⋅ sin (ϕ 2 )) ⋅ I 2 PU +
(ε x ⋅ cos(ϕ 2 ) − ε r ⋅ sin (ϕ 2 ))2 ⋅ I 22 PU
2
Viste le ipotesi di lavoro possiamo rappresentare la nostra equazione in questo modo:
∆ VPU ≅ a ⋅ I 2 PU + b ⋅ I 22 PU
Questa espressione mi rappresenta una parabola, quindi avremo che l'andamento della
caduta di tensione sarà di tipo parabolico e la concavità di questa parabola potrà essere
rivolta verso l'alto oppure verso il basso e dipenderà strettamente dal segno della
funzione:
ε x ⋅ cos (ϕ 2 ) − ε r ⋅ sin (ϕ 2 )
in particolare la concavità sarà verso l'alto quando:
ε x ⋅ cos(ϕ 2 ) − ε r ⋅ sin (ϕ 2 ) > 0
quindi quando:
ε x ⋅ cos (ϕ 2 ) > ε r ⋅ sin (ϕ 2 )
Quindi quando l'angolo ϕ2 è maggiore di 0
ϕ2 < 0
Mentre la concavità sarà verso il basso quando l'angolo ϕ 2 > 0
Secondo la convenzione che noi abbiamo utilizzato ϕ2>0 vuol dire che carico è induttivo e
per ϕ2<0 il carico è capacitivo.
Andiamo a vedere come abbiamo definito ϕ2 quindi abbiamo che se il carico ohmico
induttivo abbiamo che la caduta di tensione è positiva, se il carico è comico capacitivo
abbiamo la condizione è esattamente opposta. Ora per capire meglio questa
rappresentazione delle caratteristiche esterne in questo diagramma è riportata la
81
caratteristica esterna, da cui si nota quale è l'andamento della tensione sul secondario al
variare della corrente parametrizzata in funzione del fattore di potenza.
Da questa rappresentazione si vede immediatamente che se il carico e ohmico induttivo
abbiamo una concavità verso il basso, e quindi una caduta di tensione positiva, mentre se
il carico è comico capacitivo si fa esattamente la condizione opposta la concavità è verso
l'alto.
Anche in questo caso il digramma ci fa notare che per carichi ohmico-capacivi la V2' pu > 1
quindi il trasformatore presenta una tensione al secondario maggiore di quella presente al
primario.
Xd
I1
Ia
V1
R0
1
R1
I
I2
I
Xd
I
2
R2
Im
Iµ
X0
R
I
V2
C
Scomponiamo la I I2 in due componenti una in fase è una in quadratura con la tensione, la
componente di corrente che circola nella resistenza è la parte in fase e mi deve dare una
caduta di tensione necessariamente che è positiva. Ricordate che il nostro trasformatore è
una macchina nella quale la tensione indotta è legata ovviamente anche alle condizioni di
carico, quindi il condensatore presente sul nostro trasformatore, esegue non solo una
azione di rifasamento dell'induttanza di dispersione, ma una azione di magnetizzazione del
trasformatore che ne aumenta il valore della tensione indotta presente sul trasformatore e
che mi compensa questa caduta di tensione, questa azione di magnetizzazione mi porta
un incremento della tensione indotta sul secondario, che conseguentemente mi compensa
la caduta di tensione sulla resistenza di cortocircuito. Questo è il motivo fisico per cui al
variare delle condizioni di carico, a parità di fattore di potenza non si ha caduta di tensione,
ma si può arrivare ad avere cadute di tensione negative. Le caratteristiche esterne ci
consentono di verificare a parità di fattore di potenza quale è l'andamento della caduta di
tensione quando la corrente varia da 0 a I2.
82
Diagramma di Kaap
Il diagramma di Kaap analizza sempre la caduta di tensione, ma mantenendo la I I2
costante e facendo variare il fattore di potenza.
I carichi possono variare da completamente induttivi a ohmico-induttivi, induttivi, ohmicocapacitivi, capacitivi, quindi il campo di analisi che ci interessa è tra:
π
π
÷
2
2
−
allora proseguiamo nella costruzione di questo diagramma, abbiamo detto che I I2 è
costante, quindi la prendiamo come riferimento, la disponiamo sul nostro asse reale:
I2
I
Ora, andiamo a calcolare quale è la caduta di tensione. Per calcolare la caduta di tensione
potremmo utilizzare o la classica relazione,
∆VPU ≅ (εr ⋅ cos(ϕ2 ) + εx ⋅ sin(ϕ2 )) ⋅ I 2PU
oppure rifarci all'equazioni di equilibrio elettrico relative circuito semplificato utilizziando la
relazione :
V1 = Z CC ⋅ I I2 + V 2I
I
Se I I2 è costante la quantità j ⋅ X CC ⋅ I 2 rispetto al nostro vettore I I2 è invariata, anche la
I
quantità R CC ⋅ I 2 sarà sempre la stessa, è costante sia I I2 che Rcc. Quindi rispetto a
I
questa particolare scelta del sistema di riferimento avremo che Z CC ⋅ I 2 sarà sempre la
stessa rispetto a un qualsiasi valore del fattore di potenza, quindi i punti O e O' saranno dei
punti invarianti.
O
Z cc I2
X cc I2
I
O
I
I
R cc I2
I
I
I2
83
Se conosciamo il valore della tensione V1, automaticamente dalle equazioni di equilibrio
elettrico conosciamo anche il valore della tensione V2I . Questo è il diagramma vettoriale:
I
V2
O
Z cc I2
V1
X cc I2
I
O
I
I
R cc I2
I
I
I2
Possiamo determinare anche quale è il fattore di potenza, infatti basta traslare la retta
parallela alla corrente I I2 in modo tale da farla coincidere con O', questo angolo è proprio il
nostro ϕ2,
I
V2
V1
O
Z cc I2
2
X cc I2
I
O
I
I
R cc I2
I
I
I2
84
secondo la convenzione che abbiamo adottato, vediamo che cosa succede quando
variamo il fattore di carico ϕ2, siamo sempre su una rete di potenza prevalente quindi V1
sarà costante, Zcc⋅I’2 è una costante quindi al variare del fattore di potenza il vertice di V1 e
V2I che sono coincidenti descriveranno una circonferenza il cui centro è O, e il cui raggio è
pari proprio a V1. Quindi questa circonferenza mi rappresenterà il luogo dei vertici del
vettore V2I al variare di ϕ2 del fattore di carico, come si vede nella seguente figura:
I
V2
V1
+
-
2
2
2
Z cc I2
I
O
O
I
X cc I2
I
Rcc I2
I
I
I2
Adesso vogliamo determinare la caduta di tensione. Per definizione la caduta di tensione,
non in forma relativa ma in forma assoluta, è uguale a:
V1- V2I
i moduli di:
∆ V = V1 − V 2I
quindi per un generico valore di ϕ2, conosco immediatamente il valore di V2I , per ricavare il
∆V, basta traslare il vettore V1 sino a far coincidere il suo punto di applicazione con O’, poi
lo si ruota sino a sovrapporlo con V2I la distanza tra i due fasori mi rappresenta la caduta
di tensione, come si fede in figura.
85
V1
∆V
I
V2
V1
O
Z cc I2
I
O
I
2
X cc I2
I
R cc I2
I
I
I2
Questo discorso lo posso fare per tutti quanti i fattori di potenza semplicemente
considerando una circonferenza che presenta raggio V1 e centro in O e una di raggio V1 e
centro in O’. Quindi la distanza tra queste due circonferenze mi dà al variare del fattore di
potenza con la corrente costante le cadute di tensione:
86
∆V
∆V
V1
∆V
I
V2
V1
+
-
2
I
O
∆V
2
2
*
Z cc I2
I
X cc I2
I
∆V
O
R cc I2
I
I
I2
∆V
∆V
∆V
∆V
Si ha una caduta di tensione positiva sino ad un certo valore dell'angolo ϕ* , dopo, quando
il carico è capacitivo, si ha una caduta di tensione negativa.
Per l'angolo ϕ*, relativamente ad una condizione di carico capacitivo, ∆V=0 quindi è una
condizione di perfetto equilibrio, se diminuiamo ancora il fattore di potenza abbiamo che la
caduta di tensione diventa negativa perché abbiamo che la tensione sul secondario
diventa più grande della tensione sul primario.
87
Rendimento dei trasformatori monofase
Analizziamo il rendimento dei trasformatori monofase. Per ora abbiamo visto quali sono le
caratteristiche elettriche e soprattutto abbiamo visto una delle caratteristiche del
trasformatore che è quella di variare la tensione nel passaggio dal funzionamento a vuoto
al funzionamento sotto carico e abbiamo visto come la caduta di tensione è funzione sia
dell'intensità della corrente che del fattore di potenza. Una altra grandezza che dipende da
questi due parametri è il rendimento, andiamo a vedere come e definito questo parametro.
Consideriamo il trasformatore come una black box definito come:
η=
Pout
Pin
Con Pout potenza in uscita e Pin potenza d'ingresso. La potenza in uscita è elettricamente
abbastanza semplice da determinare, se la tensione e la corrente in uscita sono note in
modulo e fase il valore della potenza in uscita sarà pari a:
Pout = V2 ⋅ I 2 ⋅ cos(ϕ 2 )
la potenza in ingresso è data dalla potenza in uscita più quelle che sono le perdite
associata trasformatore, quindi le perdite nel rame PCU e le perdite nel ferro Pfe quindi:
Pin = V2 ⋅ I 2 ⋅ cos(ϕ2 ) + Pfe + Pcu
quindi l'espressione del rendimento è:
η=
Pout
V2 ⋅ I 2 ⋅ cos(ϕ 2 )
=
Pin
V2 ⋅ I 2 ⋅ cos(ϕ 2 ) + Pfe + Pcu
Andiamo ad analizzare sia le perdite nel ferro che le perdite nel rame facendo riferimento
al circuito equivalente semplificato:
I
I2
I1
V1
Zm
Z CC
I
V2
88
Da questa rappresentazione si ricava immediatamente che le perdite nel ferro sono pari
alle perdite relative al ramo magnetizzante, se la tensione è costante, perché siamo
allacciati a una rete di potenza prevalente, le perdite nel ferro sono uguali a:
Pfe =
V12
=K
R0
I due parametri V12 e R0 sono per definizione delle quantità costanti quindi le perdite nel
ferro possono essere considerate al variare delle condizioni di esercizio della macchina
costanti. Andiamo ad analizzare le perdite nel rame, queste sono associate alla
circolazione della corrente nelle impedenze di dispersione primarie e secondarie quindi
sono pari a:
I
PCU = RCC
⋅ I 2I 2
I
con R CC
impedenza di cortocircuito moltiplicato il valore della corrente I’2 al quadrato. In
questa relazione:
I
PCU = RCC
⋅ I 2I 2
Notiamo che la condizione di invarianza non è più rispettata, al variare delle condizioni di
carico abbiamo che il valore delle perdite nel rame varia, questo svolgerà una certa azione
anche sul rendimento del nostro trasformatore. Il nostro scopo è quello di andare valutare
quale è la condizione per la quale il rendimento è massimo e quale è l'evoluzione del
rendimento al variare della corrente I2. Quindi andiamo a sostituire nella forma del
rendimento le espressioni delle perdite nel ferro è nel rame appena ricavate, otteniamo:
η=
Pout
V2 ⋅ I 2 ⋅ cos(ϕ2 )
=
Pin V2 ⋅ I 2 ⋅ cos(ϕ2 ) + Pfe + R CC ⋅ I 22
In realtà questa rappresentazione è una rappresentazione approssimata perché le perdite
nel rame sarebbero uguali a:
PCU = R 1 ⋅ I12 + R 2 ⋅ I 22
La I1 e I’2 non sono uguali, sono diverse perché c'è la corrente magnetizzante Im
ricordatevi che il legame è I1 = I m + I 2 ora in generale le correnti magnetizzanti sono
molto piccole, quindi in prima approssimazione possiamo trascurare il termine Im e quindi
accorpare tutte e due le perdite e rappresentarla come
R CC ⋅ I 22
Andiamo ad analizzare l'espressione del rendimento:
η=
Pout
V2 ⋅ I 2 ⋅ cos(ϕ2 )
=
Pin V2 ⋅ I 2 ⋅ cos(ϕ2 ) + Pfe + R CC ⋅ I 22
Come si può immediatamente notare il valore del rendimento è in funzione anche in
questo caso sia del valore efficace della corrente sul secondario, sia del fattore di potenza.
89
Quindi per poter tracciare l'andamento del rendimento bisogna necessariamente fissare
uno di questi due parametri. In generale ci interessa soprattutto ricavare come varia il
rendimento al variare della corrente in quando il fattore di potenza è costante. Quindi
andiamo ad analizzare l'andamento del rendimento quando il cos(ϕ2) è costante. Allora se
andiamo a fare questa analisi e si indica con:
V2 ⋅ cos (ϕ 2 ) = a
otteniamo:
η cos (ϕ ) =
a ⋅ I2
a ⋅ I 2 + b ⋅ I 22 + c
come potete immediatamente notare l'espressione del rendimento in funzione della
corrente, quando cos(ϕ2) è costante è dato dal rapporto tra una retta e una parabola,
l'andamento che si ottiene per il rendimento in funzione della I2 è un andamento all'incirca
fatto così:
Il problema è quello di andare a trovare il valore della corrente I2 per la quale si ha un
rendimento massimo. Per fare questo non dobbiamo fare altro eseguire la derivata di
questa funzione:
P
V2 ⋅ I 2 ⋅ cos(ϕ2 )
η = out =
Pin V2 ⋅ I 2 ⋅ cos(ϕ2 ) + Pfe + R CC ⋅ I 22
per I2, ed eguagliarla a zero. Allora andiamo a fare il calcolo:
[
]
[
]
V 2 ⋅ cos (ϕ 2 ) ⋅ V 2 ⋅ I 2 ⋅ cos (ϕ 2 ) + P fe + R CC ⋅ I 22 − V 2 ⋅ I 2 ⋅ cos (ϕ 2 ) ⋅ V 2 ⋅ cos (ϕ 2 ) + 2 ⋅ R CC ⋅ I 2
dη
=
=0
2
dI 2
V 2 ⋅ I 2 ⋅ cos (ϕ 2 ) + P fe + R CC ⋅ I 22
[
]
Vediamo che il denominatore è sempre positivo essendo un quadrato, dunque occorre che
si annulli il numeratore:
[
]
[
]
V2 ⋅ cos(ϕ2 ) ⋅ V2 ⋅ I 2 ⋅ cos(ϕ2 ) + Pfe + R CC ⋅ I 22 − V2 ⋅ I 2 ⋅ cos(ϕ2 ) ⋅ V2 ⋅ cos(ϕ2 ) + 2 ⋅ R CC ⋅ I 2 = 0
90
Si può mettere tranquillamente in evidenza V 2 ⋅ cos (ϕ 2
{[
)
quindi ottenere:
]
V 2 ⋅ cos (ϕ 2 ) ⋅ V 2 ⋅ I 2 ⋅ cos (ϕ 2 ) + Pfe + R CC ⋅ I 22 − ⋅I 2 ⋅ V 2 ⋅ cos (ϕ 2 ) − 2 ⋅ R CC ⋅ I 22 = 0
}
V 2 ⋅ cos (ϕ 2 ) ⋅ V 2 ⋅ I 2 ⋅ cos (ϕ 2 ) + Pfe + R CC ⋅ I 22 − ⋅I 2 ⋅ V 2 ⋅ cos (ϕ 2 ) − 2 ⋅ R CC ⋅ I 22 = 0
{
}
V 2 ⋅ cos (ϕ 2 ) ⋅ P fe − R CC ⋅ I 22 = 0
{
}
Affinché questa quantità sia nulla abbiamo tre possibilità.
La prima è V2=0, ciò non è possibile perché i trasformatori sono realizzate per avere una
tensione al secondario diversa da zero. Tensione sul secondario nulla vorrebbe dire
potenza erogata sul carico nulla e quindi è una soluzione da scartare e non fisicamente
accettabile.
Seconda condizione cos(ϕ2)=0, ma se cos(ϕ2)=0 vuol dire che non abbiamo erogazione di
potenza attiva ma solo di potenza reattiva, altra soluzione da scartare.
2
Quindi l'unica soluzione accettabile quella relativa alle quantità {Pfe − R CC ⋅ I 2 } = 0 da cui
Pfe = R CC ⋅ I 22
Mi dice che affinché il rendimento sia massimo le condizioni di carico devono essere tali da
far sì che le perdite nel ferro Pfe siano uguali alle perdite nel rame PCU quindi che si rispetti
l'eguaglianza:
Pfe = PCU
Questa condizione è indipendente dal fattore di potenza, vedete che non dipende dal
cos(ϕ2), vale per qualunque condizione, quindi è una condizione valida per tutti i valori del
fattore di potenza, per qualsiasi curva parametrizzata in funzione del valore del cos(ϕ2),
avremo il rendimento massimo quando le perdite nel ferro Pfe, sono uguali alle perdite nel
P =R
⋅ I2
CC
2 può essere espressa anche in funzione della
rame PCU. Questa relazione fe
corrente I2 in per unit, infatti basta moltiplicare il primo e il secondo membro per la corrente
nominale al quadrato:
Pfe − R CC ⋅ I
2
2n
I 22
⋅ 2 =0
I2n
R CC ⋅ I 22 n è quella quantità che viene indicata come dato di targa ed è la
La quantità
potenza dissipata nelle condizioni di cortocircuito, cioè relativi alla prova di cortocircuito:
PCC = RCC ⋅ I22n
la PCC che viene data come dato di targa, allora sostituendo
Pfe = PCC ⋅ I22pu
Pertanto il valore della I2 in per unit, per la quale si realizza la condizione di massimo
rendimento è:
91
I 2 pu =
P fe
P CC
Da questa relazione si vede immediatamente un aspetto fondamentale, che la condizione
di massimo rendimento è una condizione definita dalle caratteristiche del trasformatore,
cioè dipende dalle perdite nel ferro e dalla perdita in cortocircuito. Quindi quando si sceglie
un trasformatore e lo si vuole far lavorare nelle condizioni di massimo rendimento si dove
analizzare quelle che sono le condizioni di carico del trasformatore, in base a queste
valutare quale è la corrente che mediamente viene erogata dal vostro trasformatore, su
questa corrente andare a definire il rapporto Pfe / PCC
Quindi si sceglie il tipo di trasformatore che massimizza il rendimento, questa è una
operazione che viene fatta per ottimizzare economicamente ed energeticamente la scelta
dei trasformatori.
Come si può notare la condizione di efficienza massima non ce l’abbiamo per le condizioni
di corrente nominale. La condizione di efficienza massima generalmente, nei trasformatori,
è compresa tra il 30% e il 50%.
Il valore è compreso in questa banda perché le grandezze sono tempo – varianti (e sono
più o meno sempre comprese in questa fascia). Si fa un discorso di media di assorbimento
dei carichi. In media l’energia che viene assorbita dalla macchina è pari al 50% della sua
potenza nominale per il tempo di completo funzionamento. Conoscendo le condizioni di
massima efficienza posso adattarle via via alle condizioni di utilizzo e alla taglia del
trasformatore. L’andamento del rendimento in funzione della I2’pu presenta un massimo per
I 2pu =
PFe
Pcc
per un cosφu costante. Al crescere del cosφu cresce anche l’efficienza. Il
' pu
punto di massimo è pero sempre lo stesso (si ha per la stessa I 2 ), si ha una famiglia di
parabole tutte con il massimo centrato per lo stesso valore di corrente. Con questo
abbiamo definito due delle caratteristiche più importanti del trasformatore, ossia la
caratteristica esterna e l’efficienza.
92
Trasformatore trifase
Lezione del 9/11 (segue all'esercitazione)
Brevi richiami alle strutture del nucleo ferromagnetico che vengono utilizzate nei trasformatori.
Abbiamo già studiato nelle lezioni precedenti la struttura che prende il nome di stella complanare,
che nasce dall'esigenza di riprodurre dal punto di vista dei nuclei ferromagnetici la stessa simmetria
che si ha nei sistemi elettrici, ove c'è la necessità di realizzare delle terne di tensione simmetriche
(dirette od inverse che siano), cioè terne in cui le grandezze tensioni siano sinusoidali e sfasate tra
loro di 120° elettrici. Per riproporre la stessa simmetria nel settore magnetico si cerca di configurare
i 3 trafo monofasici di partenza con una struttura geometrica che risulti essere anch'essa simmetrica
e quindi con uno sfasamento angolare tre i tre trafo di 120°. Fatto ciò si ottiene la struttura appunto
del trasformatore a stella, già visto, in cui i 3 trafo si compenetrano per formare la figura stella, che
è già una struttura alleggerita sulla quantità in ferro avendo eliminato 2 delle 6 colonne presenti nei
trafo monofase; se poi supponiamo che l'alimentazione risulti essere simmetrica, la terna delle
tensioni farà sì che i flussi circolanti nei trafo siano anch'essi simmetrici (avremo una terna di flussi
simmetrica ΦA, ΦB, ΦC) e quindi nella colonna centrale, parte comune ai tre trafo circoleranno i
tre flussi a somma nulla se il sistema è simmetrico: quindi si può sopprimere la colonna centrale,
non interessata ad alcun flusso dal punto di vista magnetico (non vi è né flusso né caduta di tensione
magnetica): sopprimendo la colonna centrale c'è una riduzione del ferro del 50% per quanto
riguarda le colonne; se poi si decide di perdere in simmetria per motivi prettamente economici,
poiché la struttura a stella ha problemi di ingombro e difficoltà costruttive nei giunti a 120° dei
lamierini ove si incastrano, con costi relativi alti, si complanarizza la struttura: la si proietta su un
piano che risulti essere disposto su una delle colonne (vedi figura 1, colonna B) ed ortogonale al suo
giogo.
Quindi proiettando il trafo su questo piano avremo che il trafo B viene trasformato in una sola
colonna, gli altri 2 trafo porteranno alla formazione della struttura a stella complanare: si è perso
nella simmetria geometrica di distribuzione dei campi ma si guadagna in semplicità costruttiva: il
nucleo ferromagnetico avrà 3 colonne e 4 gioghi, con notevole risparmio di ferro. I problemi creati
dalla perdita di simmetria geometrica dal punto di vista magnetico: il trafo A ha solo una colonna e
2 gioghi, come il trafo C, mentre il trafo B è costituito da 1 sola colonna; quindi applicando le stesse
tensioni e sottoponendo il trafo agli stessi flussi, avremo che essi circoleranno in circuiti magnetici a
diversa riluttanza e quindi caratterizzati da correnti magnetizzanti differenti ( B avrà la corrente più
piccola di A e C). Per ovviare a questo squilibrio nei dati di targa figura la media delle 3 correnti
misurate, che se rilevate però strumentalmente e singolarmente avranno diversi valori. E' una
struttura efficace per alimentazioni simmetriche e carichi equilibrati; se però il carico è squilibrato,
ed in particolare se i carichi squilibrati determinano la circolazione di correnti omopolari, risulta la
93
condizione di tensioni indotte e flussi omopolari: per costruzione la struttura non consente la
circolazione di flussi omopolari, essendo stata soppressa l'unica colonna in cui originariamente era
consentito il passaggio del flusso omopolare (quella centrale) che quindi circolano esclusivamente
in aria (vedi figura 2). Quindi la permeanza magnetica ai flussi omopolari in questo tipo si trafo
risulta essere molto bassa, il che può essere un vantaggio per alcuni aspetti, uno svantaggio per altri,
analizzati nel corso di macchine 2. Ora analizziamo il trafo dal punto di vista delle tensioni: su ogni
colonna viene applicata la tensione di fase, pari a jωN₁Φ: noto N e poiché nelle colonne circolano i
flussi ΦA, ΦB, ΦC, è nota anche la sezione, essendo Φ=BS: definito il punto di lavoro del ferro è
automaticamente definita la sezione della colonna, e poiché i flussi di colonna sono all'incirca pari a
quelli dei gioghi, le due sezioni saranno uguali: la struttura ferromagnetica del trafo a stella
complanare avrà le sezioni del ferro uguali (anche se in realtà per motivi economici e di trasporto si
tende a far saturare il ferro nei gioghi, che risulteranno quindi più sottili).
Vediamo ora la configurazione a triangolo, derivandola dall'altra configurazione elettrica
simmetrica: dovremo realizzare una struttura che porti ad avere una stessa configurazione
geometrica, e compenetrando i tre trasformatori si ottiene un prisma (vedi figura) a base triangolare.
Ciascuna colonna risulta essere quella in cui verranno realizzati gli avvolgimenti. E' ancora una
struttura voluminosa e di difficile realizzazione (angoli di 60° tra i gioghi), economicamente
svantaggioso, per cui anche in questo caso si complanarizza la struttura: la si taglia (in a-b, in alto ed
in basso) così che il flusso che circolava prima all'interno dei triangoli continui a circolare nel ferro
realizzando delle connessioni per la richiusura dei flussi e la si complanarizza: avremo una struttura
sia con le 3 colonne di partenza (A, B, C) che le colonne di chiusura (1, 2). Questo trasformatore
così ottenuto prende il nome di trasformatore a 5 colonne. Vantaggi: le sezioni delle colonne
risultano essere sqr3 volte superiori di quelle dei gioghi; un eventuale flusso omopolare presente si
evolve nel ferro; quindi dal punto di vista del comportamento ai carichi squilibrati questo
trasformatore si comporta esattamente come 3 trasformatori monofase (permeanza ai Φ omopolari
molto elevata). Un'altra struttura da analizzare è quella a mantello (o corazzato), sempre trifase,
ottenibile sovrapponendo (e compenetrando) in cascata 3 strutture identiche di trasformatori
monofasici a mantello. Sono obbligatorie particolari considerazioni sul senso degli avvolgimenti
perché si possono avere sezioni dei gioghi uguali o differenti.
94
Trasformatore trifase e autotrasformatore
Lezione 13-11-2006 Vincenzo
Nella lezione precedente abbiamo incominciato ad analizzare una particolare struttura di
trasformatore trifase e ci siamo concentrati sulla struttura del trasf. trifase con nucleo
ferromagnetico a cinque colonne e abbiamo detto che il trasf. trifase con nucleo a cinque colonne
puo’ essere considerato una complanarizzazione del trasf. trifase ottenuto dalla compenetrazione a
triangolo di tre trasformatori monofasi e la struttura risulta essere fatta in questa maniera:
Vogliamo studiare che cosa accade a questa struttura e quali risultano essere le dimensioni fisiche
fra delle varie parti quando viene alimentato con una terna di tensioni simmetrica. Le colonne
centrali risultano essere quelle disposte più all’interno della nostra struttura quindi su queste
andremo ad analizzare i nostri avvolgimenti e avremo: avvolgimento primario della fase r,
avvolgimento primario della fase s e avvolgimento primario della fase t. Ipotizziamo di alimentare il
nostro sistema con una terna di tensioni simmetriche: quindi le tensioni di fase che andiamo ad
applicare su ciascuna delle tre bobine costituisce una terna simmetrica, quindi abbiamo:
i valori efficaci della tensione valgono: V ≈ ωN1Ф
si ricava immediatamente che il legame che lega la tensione e il flusso è diretto, in piu’ sappiamo
che il legame vettoriale è dato da una rotazione di 90°(V ≈ jωN1Ф) quindi se applichiamo una
terna di tensioni simmetriche corrisponderà una terna di flussi simmetrici ruotati di 90° nel senso
degli anticipi in questo caso particolare.
95
I flussi applicati sul sistema potranno a loro volta considerarsi una terna simmetrica ФA ,ФB ,ФC
Su ciascuna delle colonne dove sono posti gli avvolgimenti avremmo tre flussi ФA ,ФB ,ФC
I flussi successivamente tenderanno ad evolversi all’interno dei gioghi e quindi avremmo che la
distribuzione dei flussi risulterà essere fatta cosi’ seguendo un percorso ordinato,quindi potremmo
individuare un flusso Ф1,un flusso Ф2 che circola nel giogo tra la colonna A e B, un flusso Ф3 che
circola tra la colonna B e C,e un flusso Ф4 che si richiude attraverso la colonna laterale. Quindi
abbiamo una distribuzione magnetica del sistema cosi’ fatto:
96
Analisi magnetica.
Applichiamo la condizione di solenoidaleità a ciascun cociclo, cioè a ciascun punto dove
convergono i flussi di colonna e i flussi di giogo:
Si ricava che il flusso della colonna a risulta essere(siamo in condizioni di alimentazione sinusoidale
possiamo utilizzare le rappresentazioni simboliche):
ΦA=Φ2+Φ1
ΦB=Φ3+Φ2
ΦC=Φ4+Φ3
Se osserviamo il cociclo piu’ esterno
otteniamo:
ΦA+ΦB+ΦC = Φ4+Φ1
Siccome abbiamo applicato,per ipotesi, una terna di flussi simmetrica
ΦA+ΦB+ΦC=0
Allora:
0=Φ4+Φ1
ΦC=Φ1+Φ3
97
i flussi Φ1 Φ2 Φ3 risultano essere combinazione di ΦA ΦB ΦC
di conseguenza se da una terna di vettori otteniamo una terna di vettori simmetrici sicuramente la
terna di partenza sarà simmetrica quindi i flussi Φ1 Φ2 Φ3saranno una terna simmetrica e
dovremmo vedere in che relazioni stanno con il flusso ΦA ΦB ΦC
Questo perche’ ΦA ΦB ΦC sono legati dalla tensione quindi conoscendo l’entità del flusso ΦA
potremmo determinare l’entità dei flussi Φ1 Φ2 Φ3 .
Per ricavare Φ1 faccio differenza a due a due:
ΦA-ΦB=Φ2-Φ1-Φ3+Φ2
ΦB-ΦC=Φ3-Φ2-Φ1+Φ3
ΦC-ΦA=Φ1-Φ3-Φ2+Φ1
Se un sistema e’ simmetrico:
Φ1+Φ2+Φ3=0
Da cui:
ΦA-ΦB=3Φ2
ΦB-ΦC=3Φ3
ΦC-ΦA=3 Φ1
Graficamente si ha :
ΦA-ΦB vettore che risulta essere √3 ΦA e sfasato rispetto a ΦA di 30° nel senso degli anticipi,
quindi conosciamo direttamente il valore del vettore ΦA-ΦB ma quello che ci interressa oltre alla
fase è l’ampiezza, quindi:
ΦA-ΦB=√3 ΦA=3 Φ1
Φ1=ΦA/√3
ΦA=√3Φ1
Si ottione che la terna dei flussi risultanti risulta essere ruotata rispetto alla terna dei flussi di
colonna di un angolo di 30°, si ottiene che l’ampiezza dei flussi di giogo risulta essere legata ai
flussi di colonna da un fattore √3 .
Questa relazione ci consente di individuare quale deve essere il rapporto fra le sezioni di colonna e
le sez. di giogo, infatti sappiamo che generalmente noi facciamo lavorare il ferro in tutto il nucleo
98
ferromagnetico nelle stesse condizioni cioè allo stesso valore di induzione quindi vanno divisi in
tutti i punti del nucleo ferromagnetico e non risulta essere lo stesso.
Il legame tra Φ e B è:
Φ=BS
Quindi avremo che ΦA risulta essere il valore del flusso nella colonna A ma è uguale in tutte le
colonne quindi risulta essere:
BSC= Φ1=√3 BSg
Vogliamo stesso valore di B nel nucleo ferromagnetico
SC=√3 Sg
Con questo tipo di nucleo ferromagnetico noi possiamo far in modo che in condizioni di
funzionamento a regime e con un sistema di tensioni applicato simmetrico il nucleo ferromagnetico
lavori nelle stesse condizioni facendo le sezioni di colonna √3 volte piu’ grandi delle sez. di giogo.
Andiamo a ridurre il ferro,l’ingombro quindi il costo relativo ai gioghi superiori e inferiori e alle
colonne laterali. Questo risulta essere un vantaggio nel nucleo a stella complanare nel quale invece
si aveva una uguaglianza delle sezioni di giogo e delle sez. di colonna. Un altro vantaggio
relativamente a questa configurazione tra il nucleo a stella complanare e il nucleo a cinque colonne
e che nell’ipotesi in cui il sistema risulti essere sottoposto alla circolazione di flusso omopolare
quindi ΦA+ΦB+ΦC=3 Φ0 in questo caso i flussi Φ4 e Φ1 cioè i flussi più esterni non risultano
essere più uguali ciò vuol dire che la componente omopolare di flusso circolante su ciascuna
colonna tende a sommarsi singolarmente in ciascun giogo per dar luogo a una differenza tra il
flusso nella colonna 1 rispetto al flusso della colonna 5.
Nel trasf. a cinque colonne la presenza di un flusso omopolare determina la circolazione di flussi in
ferro e non come capitava nei nuclei a stella complanare dove i flussi omopolari circolavano in aria.
Nel nucleo a cinque colonne i flussi omopolari evolvono all’interno del nucleo ferromagnetico
mentre nei nuclei a stella complanare non evolvono nel nucleo ferromagnetico ma evolvono
all’esterno secondo i percorsi in aria. Da un punto di vista impiantistico vi differenzia l’impedenza
omopolare del trasf..
L’impedenza omopolare del nucleo a cinque colonne risulta essere uguale a quella di
magnetizzazione.
Trasformatore con nucleo ferromagnetico a mantello
Struttura nucleo a mantello nei trasf. monofasici:
Abbiamo due colonne laterali di sezione pari alla metà che vengono raccordate mediante due
gioghi, nella colonna centrale abbiamo l’avvolgimento 1°-ario e avvolg. 2°-ario. Le sezioni devono
99
essere esattamente la metà perche’ il flusso circolante nella colonna separava le due aliquote, ΦC/2,
in virtù della geometria del sistema.
Nel trasf. trifase con nucleo ferromagnetico a mantello si riproduce questa struttura e si dispongono
i trasf. a mantello uno sopra l’altro in modo tale da realizzare un unico trasformatore chiamato trasf.
trifase a mantello e la struttura che si ottiene è:
Analizziamo l’evoluzione dei flussi relativi al trasf. A e B perche’ il discorso risulta riproponibile.
Ipotizziamo di alimentare i tre trasf. in modo congruente con i morsetti definiti secondo la
convezione di mutuo accoppiamento positivo. Ipotizziamo di alimentare il nostro sistema con una
terna di tensioni simmetriche e ipotizziamo di prevedere una terna di flussi anch’essa simmetrica .
Nelle colonne centrali circoleranno i flussi di colonna, i flussi di colonna poi si suddivideranno in un
aliquota esattamente pari alla metà. Su ciascuna colonna laterale e su ciascun giogo interno circolerà
un flusso che sarà pari al flusso di colonna relativo/2. I flussi risultano essere sempre sfasati uno
rispetto all’altro di 120° percio’ :
100
Nei gioghi superiori e inferiori siamo sicuri che i flussi circolanti risultano essere pari ai flussi di
colonna A e C diviso 2. Nelle colonne esterne siamo sicuri che i flussi saranno pari a ΦA/2,ΦB/2 e
ΦC/2. Nei gioghi che definisco interni si ha la comunanza tra il trasf A e B e trasf. B e C.
Nei gioghi interni sono presenti i due flussi sia ΦA/2 che ΦB/2 e secondo la convenzione che
abbiamo adottato i due flussi sono opposti quindi all’interno del giogo interno circolerà un flusso
che risulterà essere pari a ΦA/2-ΦB/2 , la combinazione dovrà essere vettoriale perché sono sfasati
di 120° elettrici conseguentemente avremo che il flusso ΦA/2-ΦB/2 mi darà un flusso di giogo
interno che risulterà√3 volte superiore.
Quindi se noi alimentiamo secondo questa procedura sicuramente dovremo fare in modo che le
sezioni dei gioghi più interni risultino essere√3 volte superiore rispetto a quelle dei gioghi esterni e
delle colonne laterali . Questo problema si può scavalcare se invece di alimentare secondo la
convezione ,in modo diretto, si utilizza un’alimentazione alternata. Cioè invece di fornire la tensione
come abbiamo scelto ,scegliamo di applicare la tensione positiva sul primo trasformatore invertiamo
la tensione sul secondo trasformatore e lasciamo sul terzo trasf. lo stesso tipo di alimentazione.
Facendo cosi’ si invertirà il senso del flusso, quindi il verso che generalmente era positivo per la
tensione sarà l’opposto:
101
A questo punto i flussi risultano essere concordi, nei gioghi laterali non circolerà più il flusso ΦA e
ΦB ma la somma ΦA+ΦB che risulta essere ΦC/2 cambiato di segno per la simmetria del sistema.
Sezione di colonna metà della sez. di colonna centrale e questo è un ulteriore risparmio nel
dimensionamento del trasf.
Alimentazione alternata : la colonna interna viene alimentata con segno inverso, questo fa si che il
volume del trasf. si riduca ulteriormente e quindi si riduca il costo. Fra le tre strutture di nucleo
ferromagnetico quella utilizzata maggiormente è quella a stella complanare nelle applicazioni dei
trasf. MT-BT, perche’ nel trasf. a stella complanare l’utilizzo di carichi squilibrati soprattutto carichi
monofase sul lato bassa tensione viene tollerato meglio. Nel caso di trasf. MT-AT, dove c’e’ grande
potenza e c’e’ necessita’ di controllare tutte le componenti di sequenza sia inversa che omopolare si
utilizza un nucleo ferromagnetico a cinque colonne.
Nel nucleo a mantello i flussi omopolari circolano in ferro(è come se fossero tre trasf. monofasi
sovrapposti l’uno sull’altro) dal punto di vista dell’impedenza omopolare seguono la stessa legge
dei nuclei magnetici a cinque colonne.
Autotrasformatore
Vincenzo
L’autotrasformatore è una struttura trasformatorica nella quale il 1°-ario e il 2°-ario sono
perfettamente compenetrati, cioè l’avvolgimento 2°-ario viene completamente a costituire parte
dell’ avvolg. 1°-ario.
E’ una struttura che ha grande importanza dal punto di vista energetico perche’ consente di
realizzare la trasformazione di tensione e corrente realizzando le condizioni di efficienza più
elevate. Se gli avvolg. 1°-ario e 2°-ario sono uno parte dell’altro abbiamo che l’efficienza tende ad
aumentare, le strutture risultano essere notevolmente piu’ compatte perché avendo invece che due
bobine una sola bobina la struttura ferromagnetica e la struttura elettrica possono essere
notevolmente più piccole quindi si ha una riduzione in ferro e una riduzione in rame e quindi anche
una riduzione in costo .Lo svantaggio e’ quello che si perde nell’isolamento galvanico ,non abbiamo
più una separazione galvanica netta tra avvolgimento 1°-ario e avvolg. 2°-ario.
102
Abbiamo un avvolg. 1°-ario costituito da N1 spire e l’avvolg. 2°-ario viene dedotto dall’avv. 1°-ario
risulta essere una parte delle N1 spire. Avvolg. 2°-ario: N1-N1
La struttura ha la stessa forma di un partitore di tensione con il vantaggio che da un punto di vista
dissipativo, essendo un partitore induttivo, non ha le problematiche di efficienza associate a un
partitore resistivo.
Definiamo il valore della tensione impressa al 2°-ario e il valore della tensione in uscita al 2°-ario,
al 1°-ario deve essere applicata la convezione degli utilizzatori(la corrente risulta essere in ingresso),
mentre nel 2°-ario la corrente risulta essere in uscita secondo la convezione dei generatori. Abbiamo
un avolg. che è soltanto un avvolgimento primario e un avvolgimento che è in comune con il 1°-ario
e 2°-ario e per questa ragione definiamo il numero di spire relative all’avvolg. serie:NS
NS =N2-N1 mentre il numero di spire comuni dell’avvolg. 1°-ario e 2°-ario risulta essere uguale a
N2(numero di spire comuni = NC ).
Al num. di spire serie e al num. di spire comuni sarà associato dei flussi di dispersione delle
resistenze proprie delle N1 spire delle NC spire quindi potremmo definire per le N1 spire e per le NC
spire delle impedenze di dispersione serie e impedenze di disp. comune .
Funzionamento a vuoto.
Equazione equilibrio elettrico al primario:
V1+E10 =ZSI10 +ZC I10
V1=(ZS+ZC)I10+ j ω N1 Φm0
E10=tensione indotta=-j ω N1 Φ10
103
Si ricava:
V2+E20 =ZC I10
V2=ZC I10 - E20
V20=ZC I10+ j ω N1 Φm0
equaz. di equilibrio elettrico al 2°-ario
Nel trasf. quando il funzionamento risultava essere un funzionamento a vuoto sull’avvolg. 2°-ario
non circolava più una corrente, qui invece a causa dell’accomunanza dell’avvolg. comune tra 1°ario e 2°-ario abbiamo una circolazione di corrente e anche noto che le macchine costruttivamente
vengono costruite in modo tale che le impedenze risultino essere piccole rispetto all’impedenza base
e le correnti a vuoto sono piccole rispetto alla corrente nominale del trasf. quindi generalmente le
cadute di tensione nelle impedenze di dispersione nelle condizioni di funzionamento a vuoto
possono essere trascurate rispetto alle tensioni che vengono indotte dai flussi di mutua quindi:
V1= j ω N1 Φm0
V20 ~ j ω N2 Φm0
(V1/ V20) ~ (N1/ N2)
con la struttura autotrasformatorica continuiamo ad ottenere la relazione caratteristica dei trasf. il
rapporto tra la tensione secondaria a vuoto e primaria risulta essere legata sempre al rapporto di
trasformazione
modello autotrasf. quando colleghiamo un carico e circuito equivalente:
104
Collegando un carico sul trasf. circolerà una corrente I2, sulla parte di spire in comune circolerà I1
e sulla parte dell’avvolg. comune circolerà IC, non potremmo piu’ avere perfetta uguaglianza con la
corr. I1 e con la corrente che circola nelle N1-N2 spire perché stiamo assorbendo corrente per
alimentare il carico.
I1= IC + I2
1° equazione:
V1=ZS I1 +ZC IC+j ω N1 Φm
2° equazione:
V2=-ZC IC +j ω N2 Φm
Il flusso Φm è prodotto delle forze magnetomotrici presenti sul sistema NSI1 +NC IC
Siamo abituati ad associare alla corrente magnetizzante un verso di corrente fittizia, la corrente
magnetizzante era quella corrente che circolava nell’avvolg. primario mi produceva il flusso che
era presente nelle condizioni di funzionamento sotto carico. La corrente magnetizzante circolante
nell’avvolg. primario mi introduceva la stessa forza magnetomotrice prodotta dall’avvolg. primario
e secondario. Potremmo dire che:
NSI1 +NC IC = N1Im
Im corrente magnetizzante che circolando nell’avvolg. primario mi produca lo stesso effetto
(N1-N2 )I1+N2IC = N1I1-N2I2 =N1Im
Abbiamo ottenuto che formalmente la forza magnetomotrice necessaria a sostenere il flusso Φe
risulta essere formalmente identica a quella che abbiamo visto nei trasf. .
105
Se vale lo stesso discorso dei trasf. potremmo associare la tensione indotta al flusso di mutua la
c.d.t. sull’impedenza di magnetizzazione
V1=ZS I1 +ZC IC+Z0 Im
V2=-ZC IC+( N2/N1)Z0 Im
N1I1-N2I2 =N1Im
Il modello matematico dell’autotrasformatore si discosta di un poco da quello del trasf. infatti
abbiamo delle grandezze primarie che rientrano anche nelle equazioni del 2°-ario quindi bisogna
cercare di rendere il modello congruente e eseguire quelle che sono le operazioni di trasformazione
che abbiamo visto nel trasf.. quindi modifichiamo queste relazioni per avere un modello vicino a
quello ottenuto per il trasf. .
Trasformiamo le equazioni di equilibrio elettrico al primario in modo tale che compaiano grandezze
solo del 1°-ario:
V1=ZS I1 +ZC (I1-I2)+Z0 Im
I1=( N2 /N1) I2+Im
I2‘=(N1 /N2) (I1-Im)
Sostituendo nella prima eq. :
V1=ZS I1 +ZCI1- ZC (I1-Im)(N1 /N2)+Z0 Im
=[ ZS+ZC (1- (N1 /N2) ) ]I1+(Z0+ ZC(N1 /N2)) Im
=[ ZS-ZC ((N1 /N2)-1 ) ]I1+(Z0+ ZC(N1 /N2)) Im
V2= -ZCI1+ ZCI2 +(N2 /N1) Z0Im
= -ZC(N2 /N1)I2+ ZCIm +ZCI2+(N2 /N1) Z0Im
vogliamo ottenere un’equazione di equilibrio elettrico sul 2°-ario.
(V1/ V20)= (N1 /N2)
V2’= (N1 /N2) V2
I2’= (N2 /N1) I2
(implica)
(V2’/ V2)= (N1 /N2)
Moltiplicando N1 /N2 sia il primo che il secondo membro
V2’= -ZCI2-ZC(N1/N2)Im+ZC(N1/N2)I2+Z0Im
V2’= -ZC(N1/N2)I2’+ZC(N1/N2)Im+ZC(N1/N2)2I2’+Z0Im
= -ZC(N1/N2)( (N1/N2)-1)I2’+(ZC(N1/N2)+Z0)Im
= -ZC(N1/N2)( (N1/N2)-1)+ZC(N1/N2)+Z0)Im
106
Abbiamo riportato il circuito equivalente dell’autotrasf. nella forma simile a quella del trasf. in cui
c’è un termine comune che è quello di magnetizzazione e un termine di dispersione che risulta
essere diverso dal primario al secondario, non abbiamo più una struttura a π.
Il circuito equivalente dell’autotrasformatore:
ci siamo portati ad una struttura simile a quella del
trasf. dove l’unica differenza e che abbiamo ottenuto un ramo magnetizzante in cui la parte attiva in
termini del flusso risulta essere la tensione effettivamente indotta, poi c’è una parte comune che
ovviamente partecipa anche sull’elemento di dispersione perché i flussi di dispersione nella parte
comune costituiscono un elemento comune sia nell’avvolg. primario sia secondario quindi pur
essendo un flusso di dispersione deve essere neccesariamente presente in quello che noi avevamo
chiamato ramo di magnetizzazione.
Se si fanno dei conti più complicati si puo’ dimostrare che trascurando la caduta di tensione prodotta
sull’impedenza di dispersione primaria dovuta dalla corrente magnetizzante la struttura equivalente
dell’autotrasf. tende a semplificarsi e si riporta a una struttura a γ :
107
L’autotrasformatore rispetto al trasf. non presenta una struttura simmetrica perché il valore
dell’impedenza serie e il valore dell’impedenza comune possono assumere valori diversi, risulta
essere una struttura in cui assume notevole importanza il parametro N1/N2
Quanto più questa quantità risulta essere vicina all’unità tanto più piccola risulta essere il valore
dell’impedenza di cortocircuito, se N1/N2=0.5 si ha 0.5-1=0.5 che al quadrato sara’ 0.25 quindi
abbiamo un effetto di riduzione di impedenze di tipo comune quanto più il rapporto di
trasformazione risulta essere prossimo all’unità .
L’autotrasformatore presenta delle caratteristiche eccezionali in termini di efficienza quanto più il
valore del rapporto di trasformazione risulta essere vicino all’unità ,cioè quanto più il rapporto di
trasformazione risulta essere compreso fra 2 e 0.25.
Questo tipo di macchina viene utilizzato nelle interconnessioni laddove il rapporto di trasformazione
non deve essere troppo elevato ma dove i flussi di potenza risultano essere molto grandi e di
conseguenza le efficienze diventano importanti .
Si dimostra che gli autotrasf. a parità di funzionamento risultano essere più performanti dei trasf.
secondo un rapporto proprio dato da questa quantità(N1/N2).
Facciamo un analisi comparativa fra l’autotrasf. e il trasf. e ipotizziamo di voler valutare le perdite
nel rame nei due ipotizzando di far lavorare il rame esattamente nella stesso modo cioè con lo stesso
valore di densità di corrente .
Calcoliamo le perdite nel rame del trasf. e nell’autotrasf. prima nel primario poi nel secondario.
Perdite nel trasf. nel primario:
Pa1=R1I12 = ρ (lsp)/S(N1-N2) I12
ma I1= σS
La resistenza R1 dell’autotrasf. è resistenza dell’avvolg. serie, quella parte dell’avvolg. propria
dell’avvolg. 1
dove lsp = lunghezza ciascuna spira
Pa1=R1I12 = ρ (lsp)/S(N1-N2) I1σS
Pt1=ρlspN1I1σS
(Pa1/ Pt1)=((N1-N2)/ N1)=1-(N2-N1)
108
Se N1/N2=0.5 l’autotrasf. dissipa la metà del trasf. .
La potenza dissipata sul secondario:
Pa2=ρlspN2ICσ
Pt2=ρlspN2I2σ
Ricordando che: IC=I1-I2
Im=I1-(N2/N1)I1
Se ipotizziamo di trascurare la corrente magnetizzante perché sappiamo che è una quantità piccola
perciò approssimando possiamo dire che:
I1~(N2/N1)I2
Percio’:
IC=I1-I2~((N2/N1)-1)I2
Facendo il rapporto:
(Pa2/ Pt2)= IC/I2 =(N2/N1)-1
(Pa1/ Pt1)=(N1-N2)/ N1=1-(N2/ N1)
A parte il segno praticamente abbiamo che le espressioni risultano essere identiche,quindi la somma
di queste due quantità mette in evidenza che la potenza che risulta complessivamente dissipata da un
trasf. in rame e da un autotrasf. stanno nel rapporto 1-(N2/ N1)
Se realizziamo rapporti di trasformazioni che risultano vicini all’unità otteniamo delle differenze tra
l’autotrasf. e il trasf. che risultano essere sostanziali.
Facendo N2/ N1 =0.5 abbiamo che il rapporto risulta essere il 50% cioè perdite nel rame che
risultano essere del 50%, questo ci fa aumentare l’efficienza.
Non abbiamo più l’avvolg. primario e secondario , abbiamo un unico avvolg. e abbiamo una sezione
che è un ingombro che risulta essere più piccolo quindi l’autotrasf. avrà bisogno di lunghezze di
giogo che sono più piccole e quindi tutta la struttura risulterà essere più compatta.
Se andiamo a vedere quale risulta essere la corrente che circola nell’elemento comune si ricava che
IC =((N2/N1)-1)I2 quindi il valore di corrente risulterà essere la metà del valore di corrente che
circola nel pari trasf. nell’elemento comune e quindi a parità di densità di corrente la sezione che si
può utilizzare risulterà essere la metà.
Avremo risparmio nel ferro,nel rame perché non abbiamo più un avvolg. secondario ma abbiamo
che anche le sezioni comuni potranno essere dimensionate per essere più piccole a parità del punto
di lavoro come densità di corrente.
Nel caso in cui i rapporti di trasformazioni desiderati non siano elevati ma siano bassi(N1/N2~ 0.5
), l’efficienza risulta essere veramente elevata, ecco perché nei sistemi di interconnessione si
utilizzano gli autotrasf..
L’autotrasf. è meno ingombrante ha un’efficienza sicuramente superiore, costa a parità di potenza
di meno, è una struttura più compatta quindi è facilmente trasportabile e ha come unico svantaggio
il fatto che non realizza la separazione galvanica oltretutto la modellizazione circuitale risulta essere
un po’ più complessa e anche le prove che devono essere fatte per ricavare i parametri del circuito
equivalente risultano essere un po’ più delicati
109
110
Macchine elettriche rotanti
Generalità
Principi di conversione dell’energia elettromeccanica
Lo studio delle macchine elettriche rotanti si basa sul processo di conversione dell'energia elettrica in
meccanica (motori) e dell'energia meccanica in elettrica (generatori).
La conversione dell'energia elettrica in energia meccanica si basa sulla legge di conservazione
dell'energia, essa ci dice che l'energia non si crea né si distrugge, ma si trasforma. Nelle macchine
elettriche possiamo distinguere tre diversi tipi di sistemi: sistemi di tipo elettrico, di tipo magnetico e
di tipo meccanico. Non è quindi possibile ottenere la conversione diretta dall'energia elettrica in
energia meccanica senza una trasformazione intermedia in energia magnetica.
La sorgente di energia della macchina sarà il tipo elettrico e si considera positiva l'energia erogata dal
sistema elettrico(convenzione dei generatori), mentre per i sistemi magnetici e meccanici si considera
positiva l'energia assorbita dal campo magnetico e l'energia sviluppata dal sistema meccanico.
Il flusso energetico è diretto quindi dal sistema elettrico a quello magnetico ed infine a quello
meccanico.
(il processo è totalmente reversibile applicando un'energia meccanica)
Il principio di conservazione dell'energia in questo caso ci dice che l'energia erogata dal sistema
elettrico deve essere uguale alla somma dell'energia immagazzinata nel campo magnetico più
l'energia sviluppata dal sistema meccanico:
We = Wmg + Wme
Questa equazione sarà valida non solo in termini assoluti ma anche in termini differenziali. Ciò
significa che ogni volta che ci sarà una variazione di energia elettrica erogata, questa variazione si
rifletterà sull'energia magnetica e meccanica:
dW = dW + dW equazione di bilancio energetico in termini differenziali
e
mg
me
Ciascuno dei sistemi in analisi è caratterizzato da processi dissipativi, ovvero dalla conversione
irreversibile di parti di energia in energia termica. Nei bilanci energetici che effettueremo si
prenderanno in considerazione sempre energie al netto, ovvero le energie depurate dalle perdite.
Questo perché l'energia che viene persa sotto forma di energia termica non entra in gioco nel
processo di conversione che ci interessa, di conseguenza nell'equazione di bilancio non verranno
prese in considerazione: l'energia dissipata per effetto joule nei sistemi elettrici, l’energia dissipata
per isteresi e correnti parassite nei sistemi magnetici e l'energia dissipata per attrito nei sistemi
meccanici.
Dobbiamo trovare delle relazioni che definiscano le tre variazione di energia elettrica, magnetica e
meccanica.
1
Facciamo riferimento ad una particolare struttura elettromeccanica. Questa struttura e denominata
ancoretta, questa viene generalmente utilizzata nei contattori per aprire e chiudere un circuito
elettrico.
Se in t=0 commutiamo l'interruttore, il circuito elettrico verrà chiuso e vi circolerà una corrente a
regime pari a I=V/R.
A questa corrente sarà associata una forza magneto motrice pari a: f .m.m. = N ⋅ i = ℜ ⋅ φ
Il flusso φ avrà l'andamento in figura che si suddivide nelle due aliquote
φ
2
Se la struttura mobile non è vincolata, essa per effetto della f.m.m. sarà attratta verso la struttura fissa
e tenderà a ridurre il traferro. A man mano che il traferro diminuisce si ha una riduzione dell'energia
magnetica immagazzinata nel campo a favore dell'energia meccanica, visto che, a causa della scarsa
permeabilità magnetica dell'aria, energia magnetica immagazzinata e soprattutto nel traferro. Quindi
il traferro è la regione in cui viene immagazzinata la maggior quantità di energia magnetica, la sua
riduzione è dunque la causa della variazione di energia magnetica.
Calcolo dell’energia elettrica
Con la legge di Kirchoff si analizza il circuito elettrico presente nella struttura elettromeccanica, si
ha: V + E = R ⋅ I , dove V è la tensione impressa, E è la tensione indotta, R è la resistenza propria del
circuito e I la corrente che vi circola.
La potenza elettrica è esprimibile come derivata dell'energia rispetto al tempo.
P=
dWe
⇒ dWe = P ⋅ dt
dt
Dato che la potenza dei sistemi elettrici a data da:
VI + EI = RI 2
dWe = VI dt = RI 2 dt − EIdt
Considerando soltanto l'energia netta si ottiene la seguente relazione: dW = − EIdt
e
andando sostituire si ottiene un'energia pari a:
2
Per la legge di Lenz, la tensione indotta risulta essere pari a:
E =−
dλ , dove
dt
dλ
rappresenta la
variazione di flusso concatenato, andando a sostituire si ottiene che la variazione di energia elettrica
al netto delle perdite risulta essere:
dWe =
dλ
Idt = I ⋅ dλ
dt
Calcolo dell’energia magnetica
Per calcolare le variazioni di energia magnetica è utile ricordare che i campi magnetici sono dei
campi conservativi, l'energia magnetica è quindi una grandezza di stato e dunque le sue variazioni
non dipendono dal particolare percorso seguito, ma dipendono esclusivamente dallo stato iniziale e
finale assunto dal sistema. Ciò ci consente di poter scegliere il percorso più facile da studiare. In
particolare risulta conveniente studiare il grafico λ − I con caratteristica magnetica lineare, dato che
l’energia magnetica è immagazzinata prevalentemente nel traferro.
Prima della chiusura dell'interruttore non circola corrente e anche il flusso sarà quindi nullo, dunque
lo stato iniziale sarà 0. Nella configurazione finale invece avremo un determinato valore di flusso,
che è legato tramite la caratteristica magnetica, al valore di corrente V/R.
Ipotizziamo di avere la struttura mobile vincolata, non si avrà conversione di energia in energia
meccanica dWme=0 e dunque l'energia elettrica erogata sarà totalmente convertita in energia
magnetica dWe=dWmg. L'energia magnetica posseduta dallo stato finale A sarà dunque pari
all'energia elettrica prodotta.
Dalle equazioni di bilancio dell'energia risulterà essere:
W = ∫ dWme =∫ i⋅dλ
mg
Essendo la corrente una funzione del flusso (la funzione è determinata dalla caratteristica magnetica )
l'integrale può essere espresso in funzione del flusso λ . Perciò gli estremi di integrazione risultano
essere il valore del flusso nello stato iniziale (zero) e il valore di flusso nello stato finale A( λ ).
A
Quindi si ha:
Wmg =
λA
∫
0
i⋅dλ
Nel grafico i − λ l’energia magnetica posseduta
dal sistema è dunque rappresentabile come l'aria
sottesa, rispetto a λ , dalla caratteristica
magnetica.
L'evoluzione degli stati di energia magnetica non
c'è nota, ma essendo questa una variabile di stato
possiamo
comunque
conoscere
l'energia
magnetica immagazzinata nello stato finale.
Allo stesso modo è possibile conoscere la
variazione di energia magnetica, dovuta ad una
variazione di corrente, da uno stato A ad uno
stato B. Essa sarà esattamente pari all'integrale
da λ a λ
della stessa funzione (sempre
A
B
nell'ipotesi di dW
me
= 0)
3
λb
∆Wmg = Wmg ( B) −Wmg ( A) = ∫ i⋅dλ
λa
Calcolo dell’energia meccanica
Per calcolare la variazione di energia meccanica bisogna studiare cosa succede quando l’ancoretta
non è vincolata ed è libera di muoversi. La prima cosa che si può notare e che il movimento
dell’ancoretta determina
una riduzione del traferro, si ha quindi una riduzione della riluttanza ℜ = l (con l lunghezza, Σ
µΣ
sezione e µ permeabilità magnetica del materiale) e dunque una variazione dei circuiti magnetici che
porterà ad una caratteristica con una pendenza maggiore. Ciò implica che si avranno diverse
caratteristiche magnetiche ad ogni stato, ma a noi interessa solo lo stato iniziale (l’ancoretta è giù) e
quello finale (l’ancoretta è su) e le loro corrispettive caratteristiche magnetiche. Un'altra cosa da
notare è che il movimento dell’ancoretta sicuramente determinerà una variazione di flusso, in quanto
varia la configurazione magnetica, questa a sua volta determina una variazione di tensione indotta e
quindi una variazione di energia elettrica e magnetica.
Un possibile percorso dallo stato iniziale a
quello finale è dato in figura dal percorso
ABC .
In seguito alla variazione di flusso si passa dal
punto A (posto sulla caratteristica magnetica
iniziale) al punto B (posto sulla caratteristica
magnetica
relativa
alla
configurazione
magnetica finale). Successivamente, siccome la
corrente deve essere pari a V/R, seguendo la
caratteristica magnetica finale si arriva sino al
punto in cui valore di corrente vale V/R.
La variazione di energia magnetica in questa
situazione risulta essere pari alla differenza tra
l'energia magnetica posseduta dallo stato C e
quella posseduta nello Stato A.
∆Wmg = W mg (C ) −Wmg ( A) = area(OCC ' O) − area(OAA' O)
La variazione di energia elettrica risulta essere invece pari all'integrale tra A e C di i⋅ dλ
C
∆We = ∫ i ⋅dλ = area( A' ABCC' A' )
A
Per ricavare la variazione di energia meccanica ci si serve ora dell'equazione di bilancio:
∆We = ∆Wmg + ∆Wme ⇒ ∆Wme = ∆We − ∆Wmg
Sostituendo i valori trovati in funzione delle aree si ottiene:
∆Wme = area( A' ABCC ' A' ) − area(OCC ' O) + area(OAA' O)
Facendo la composizione delle aree risulta che la variazione di energia meccanica è pari all'area
compresa tra le due caratteristiche magnetiche e i punti A e B.
La variazione di energia meccanica risulta essere positiva perché stiamo facendo lavoro
sull'ancoretta, la variazione di energia meccanica è stata ottenuta a spese del generatore di corrente,
4
l’energia magnetica può essere paragonata a un bacino di energia utilizzata nella conversione
dell'energia meccanica.
Nel complesso dunque, a partire da una variazione di energia elettrica, si è ottenuta una conversione
di energia che ha portato variazioni di energia di tipo magnetico e meccanico.
Analisi delle forze applicate al sistema elettromeccanico
A noi interessa studiare quali sono le forze risultanti che si vengono a creare nel sistema meccanico,
per conoscere queste si sfrutta il principio dei lavori virtuali. Secondo questo principio si ha:
dW = F ⋅ dx , da cui si ottiene: F = dWme , dove dx è lo spostamento dallo stato iniziale x allo
me
dx
stato finale x+dx.
Nel calcolo della variazione di energia meccanica fatta precedentemente si è ipotizzato che il
passaggio dallo stato iniziale A a quello finale C avvenga seguendo il percorso ABC. Se si
ipotizza invece che la trasformazione avvenga a flusso costante oppure a corrente costante, possiamo
notare che l'aria sottesa relativa alla variazione di energia meccanica è diversa. Questo ci fa pensare
che sia la forza, che l'energia meccanica siano
dipendenti dal percorso scelto.
La differenza di energia meccanica tra i due casi e
data dall'area del triangolo AB’B”A, che risulta essere
pari a dλ ⋅ di
proporzionale ai valori dλ e di ,
2
dunque risulta essere un differenziale del secondo
ordine, invece la variazione di energia meccanica è
proporzionale alla sola dx ( dW = F ⋅ dx differenziale
me
del primo ordine).
Possiamo quindi trascurare i differenziali di secondo
ordine (in quanto infinitesimo di ordine superiore)
rispetto all'intera variazione di energia meccanica
dovuta allo spostamento dx. Ne consegue che le
variazioni di energia meccanica non dipendono dalla particolare sequenza di trasformazioni seguite,
ma solo dallo stato iniziale e da quello finale.
In altre parole anche la variazione di energia meccanica risulta essere una grandezza di stato.
Dimostriamo analiticamente che la variazione di energia meccanica è una grandezza di stato, quindi
dWme = F ⋅ dx ⇒ F ⋅dx
i =cos t
= F ⋅dx
λ =cos t
1
+ di dλ
2
trascurando i differenziali di secondo ordine otteniamo
F ⋅dx
i = cos t
= F ⋅dx
λ = cos t
Trasformazione a flusso costante
Per ottenere una trasformazione a flusso costante
dobbiamo ipotizzare che lo spostamento avvenga in
modo molto rapido.
Allora ipotizziamo che la velocità di traslazione
dell'ancoretta dal basso verso l'alto sia tendente
all'infinito, questo vuol dire che in un istante nullo
l'ancoretta si porta da una posizione bassa ad una
posizione alta. La riluttanza ℜ e conseguentemente il
coefficiente di autoinduzione L, varieranno secondo un
gradino.
La corrente e il coefficiente di autoinduzione sono
legati tra di loro, da una relazione di proporzionalità
5
diretta λ = L ⋅ i
I flussi presentano una dinamica del prim'ordine che abbiamo visto analizzando l'equazione di
equilibrio elettrico v = R ⋅ i +
dλ
dt
Il flusso avrà il seguente andamento:
Se presentano una dinamica del prim'ordine non possiamo
ritenere che all'applicazione di un gradino di corrente il
flusso vari istantaneamente con un andamento a gradino,
ma tenderà a variare secondo una evoluzione che sarà
aperiodica, quindi nell'istante zero in cui si applica il
gradino di corrente il valore del flusso a destra e sinistra
dello 0 dovrà essere lo stesso.
Quindi, per lo stesso motivo, se nell’istante t =0 variamo a gradino il coefficiente di autoinduzione il
flusso non può variare, dato che λ = L ⋅ i la variazione di induttanza deve essere compensata da
una identica variazione di corrente, le due variazioni dovranno essere perfettamente identiche.
Quindi durante lo spostamento dal basso verso l'alto avremo una variazione gradino di induttanza e
una pari variazione a gradino di corrente che determinerà una trasformazione a flusso costante.
Con una trasformazione a flusso costante si avrà dλ = 0
Ricordando che la variazione di energia elettrica può essere espressa come dW = i ⋅ dλ , ed essendo
e
dλ = 0 , si ricava che in questo caso particolare la variazione di energia elettrica è nulla dWe = 0 .
Dall'equazione di bilancio dell'energia si ottiene quindi:
dWme = −dWmg ⇒ F = −
dWmg
dx
λ =cos t
Questa relazione ci fa capire che ad un incremento dell'energia meccanica corrisponde un
decremento di energia magnetica o viceversa.
Se il sistema è lineare le grandezze di flusso e corrente sono legate fra loro da una relazione lineare.
λ = L⋅I ⇒ I =
λ
(L coefficiente di autoinduzione)
L
Utilizzando questa relazione l'energia magnetica in un generico stato A può essere riscritta come:
λA
Wmg = ∫ i⋅dλ =
0
λA λ
∫
0
L
⋅dλ ⇒Wmg =
λ2
LI 2
2L 2
=
Un’altra espressione dell'energia magnetica può essere ricavata in funzione della riluttanza ℜ
λA
φA
φA
ℜφ 2
Wmg = ∫ i ⋅dλ ⇒Wmg = ∫ NI ⋅dφ ⇒Wmg = ∫ ℜφ ⋅dφ ⇒Wmg =
0
0
0
2
Ricaviamo ora i valori delle forze applicate al punto A, ricordando che il parametro che risulta
variabile in funzione di X è il coefficiente di autoinduzione L perché ad ogni spostamento cambia la
configurazione magnetica del sistema.
F =−
dWmg
dx
⇒F =−
λ =cos t
2
I 2 dL( x)
d λ
1 λ2 dL( x)
⇒F= 2
⇒ F=
2 dx
dx 2L( x)
2 L ( x) dx
Potevano arrivare ad un'altra espressione della forza tramite l'energia magnetica in funzione della
riluttanza.
6
d ℜ ( x)φ
F =−
dx 2
2
2 dℜ
( x)
⇒ F = −φ
2 dx
Una considerazione da fare è che la quantità dℜ( x)
λ = Nφ = cost ⇒ φ = cost
diventa negativa al diminuire del traferro,
dx
questo perché la riluttanza diminuisce al diminuire del traferro.
Trasformazione a corrente costante.
Per ottenere una trasformazione a corrente costante dobbiamo ipotizzare che lo spostamento avvenga
in modo molto lento. Infatti se il sistema tende a muoversi dal basso verso l'alto con una velocità
bassa, quasi vicino allo zero, avremo che le variazioni di coefficiente di autoinduzione sono molto
lente, quindi in prima approssimazione potremmo ritenere che il valore della corrente si mantenga
pressoché costante, quindi se consideriamo un processo che avvenga con una successione di stati di
equilibrio quindi molto lentamente la traiettoria si svilupperà nella seguente direzione:
In questo caso non possiamo più affermare che
l’energia elettrica è nulla, infatti abbiamo una
variazione di flusso.
L’equazione di bilancio energetico in forma
differenziale sarà pari a dW = dW + dW
e
mg
me
sostituendo i valori noti si ottiene:
Idλ = dWmg (i,λ ) + Fdx ⇒ dIλ − dWmg (i,λ ) = Fdx
L’energia elettrica e quella magnetica sono funzione
delle stesse variabili allora possiamo portarle dentro
lo stesso differenziale d ( Iλ − W ) = Fdx
mg
La quantità Iλ − W
viene chiamata coenergia
mg
dW = Fdx
c
La variazione di energia meccanica è data dalla differenza delle aree sottese rispetto all'asse delle
correnti della caratteristica magnetica finale meno quella iniziale. Queste aree sottese rispetto all'asse
delle correnti sono dette coenergia e rappresentano il complemento dell'energia magnetica.
Wc = λI −Wmg
Ovvero dall'area del rettangolo definito dai valori di λ e I meno l'area rappresentante l'energia
magnetica. La coenergia è una grandezza fittizia e non ha significato dal punto di vista fisico, ma
riesce a semplificare i calcoli. Le variazioni di energia meccanica nel caso di trasformazioni a
corrente costante possono quindi essere espresse come differenza delle coenergia tra lo stato finale e
quello iniziale. Si ha quindi
dWme = dWe − dWmg = dWc
⇒F=
dWc
dx
i = cos t
In questo caso l'incremento dell'energia meccanica produce un incremento della coenergia.
2
2
2
Dato che W = LI
allora W = λI −W = LI 2 − LI = LI sostituendo nell’ espressione della
c
mg
mg
2
2
2
forza si ha:
7
F=
2 dL
dWc
( x)
⇒ F=I
dx i = cos t
2 dx
Dalle relazioni scritte risulta dimostrato che pur partendo da trasformazioni diverse si ottiene la
stessa forza. Essa quindi è una grandezza di stato. Si vede che le forze di una macchina elettrica non
dipendono dalla velocità degli spostamenti, ma solo dalle correnti e flussi applicati. Si può notare che
la forza positiva si ha quando il movimento dell’ancoretta tende a far aumentare il coefficiente di
autoinduzione del circuito magnetico, questo si ottiene quando l'ancoretta tende a ridurre il traferro e
quindi a portare il sistema nella configurazione di minima energia.
Da queste relazioni si deduce immediatamente che per realizzare una conversione di energia elettrica
in energia meccanica si deve prima fornire una certa quantità di energia al campo magnetico, la
variazione del campo magnetico mi produrrà la conversione in energia meccanica. Viceversa se
voglio realizzare una conversione di energia meccanica in energia elettrica devo prima applicare un
sistema di forze che produrrà una variazione di energia magnetica a cui corrisponde una variazione di
flusso che mi determina una variazione di energia elettrica. Quindi l'elemento di transizione è il
legame che sussiste tra la forza e la variazione di energia magnetica, questo legame non dipende
dalla trasformazione ma dipende esclusivamente dallo stato energetico del campo magnetico.
La trattazione fatta sino ad ora è valida anche per
sistemi non lineari, questo perché abbiamo
utilizzato un ragionamento basato sulle aree che
ha la medesima validità anche per i sistemi non
lineari.
Ragionando su variazioni di aree e non su
differenze tra valori puntuali l'espressioni ottenute
rimangono inalterate anche per sistemi non lineari.
Struttura della macchina elettrica rotante
Studiamo quale deve essere la struttura di una macchina elettrica rotante affinché si possano ottenere
una conversione di energia elettrica in meccanica in maniera più efficiente possibile.
Facciamo riferimento alla seguente struttura composta da una parte fissa, detta statore, costituita da
una struttura ferromagnetica a C e da un avvolgimento di Ns spire le quali sono alimentate da un
generatore di tensione Vs. Il sistema è
poi costituito da un altro elemento
ferromagnetico
mobile
chiamato
rotore, il quale è libero di ruotare
attorno ad un fulcro. Scegliamo come
asse di riferimento per le rotazioni
dell'elemento mobile l’asse ortogonale
alla congiungente delle espansioni
polari dello Statore. Consideriamo poi
come asse solidale con l'elemento
mobile un asse ortogonale alle
espansioni polari dell'elemento mobile
stesso. La posizione dell'asse solidale
rispetto all'asse di riferimento ci consentirà di conoscere la posizione dell'elemento mobile e l'angolo
8
formato da questi due assi verrà chiamato angolo β . Convenzionalmente verrà preso come verso
positivo delle rotazioni il verso antiorario.
L'obiettivo è quello di studiare il comportamento dell'elemento mobile e le forze che lo interessano
quando si applica una determinata tensione al sistema.
Per il principio dei lavori virtuali abbiamo la seguente relazione.
dWe
dove T rappresenta la coppia.
dW = Tdβ ⇒ T =
e
dβ
Il sistema meccanico è inoltre regolato da una condizione di equilibrio meccanico:
j
dω
m = T + T equazione di D’Alambert
e m
dt
Essa ci dice che il prodotto tra momento di inerzia dell'elemento mobile (J) e la derivata rispetto al
tempo della velocità angolare (ω) risulta uguale alla somma delle coppie elettromagnetiche e
meccaniche. Il valore della coppia elettromagnetica (Te) può essere determinata sapendo che la
maggior parte dell'energia magnetica (che dà origine alla coppia elettromagnetica) risulta essere
immagazzinata in aria e dunque in un materiale caratterizzato da comportamento lineare. Sotto
questa ipotesi di linearità avremmo:
1 dL(β )
1 dℜ(β )
Te = i 2
= − φ2
2
2
dβ
dβ
Le coppie elettromagnetiche positive tendono sempre a determinare un aumento del coefficiente di
autoinduzione e quindi una riduzione della riluttanza del circuito magnetico.
Calcolo della riluttanza del sistema
Andiamo ora a vedere l'evoluzione della riluttanza magnetica nel nostro sistema, questa ci serve per
poter valutare Te. Ipotizziamo che le espansioni polari dello statore e del rotore siano sagomate in
maniera tale che al variare di β la riluttanza magnetica evolva seguendo un andamento di tipo
sinusoidale.
Per β = 0 le espansioni polari di rotore e di statore sono perfettamente allineate, in questa
condizione il traferro sarà il più piccolo possibile e conseguentemente anche la riluttanza assumerà il
valore minimo. Questo valore di riluttanza viene detto riluttanza diretta ℜ . Quando l'elemento
d
mobile ruota la riluttanza varia e per via delle ipotesi costruttive fatte, questa variazione sarà di tipo
sinusoidale.
Per β = π le espansioni polari di rotore e statore risultano essere in quadratura, questa
2
configurazione è quella in cui il traferro risulta essere il più ampio possibile, quindi avremo il valore
di riluttanza massima. Questo valore di riluttanza si indica con ℜ che si chiama riluttanza in
q
quadratura.
Se si continua a far ruotare il rotore arrivando a β = π qui avremo nuovamente le espansioni polari
allineate e il valore di riluttanza diretta.
Si ha che l’andamento della riluttanza in funzione dell'angolo β risulta essere il seguente:
Il valore della riluttanza non sarà mai nullo
né minore di zero, dunque esso avrà un
valore medio diverso da zero.
La riluttanza può essere espressa come:
ℜ = ℜa −ℜb cos(2β )
9
ℜ a è il valore di riluttanza medio
ℜa =
ℜb è il valore di cresta della sinusoide ℜ
ℜ q +ℜ d
b
2
=
ℜ q −ℜ d
2
Nota la riluttanza possiamo conoscere anche la sua derivata:
dℜ(β )
= 2ℜb sin 2β
dβ
Si può a questo punto riscrivere la relazione della coppia nella seguente forma:
1 dL(β )
1 dℜ(β )
Te = i 2
= − φ2
= −φ 2ℜb sin 2β
2
dβ
2
dβ
La coppia media della macchina risulta essere quindi funzione, oltre che di β , anche della differenza
tra riluttanza massima e minima. Essendoci una relazione di proporzionalità diretta ciò significa che
a parità di flusso la macchina può produrre coppie tanto più grandi quanto maggiore è la differenza
tra ℜ
eℜ .
max
min
Come si può notare dalla relazione precedente avremo che per 0 < β < π
la coppia media prodotta
2
risulta essere negativa, mentre per π < β < π la coppia prodotta è positiva. Ciò è visibile anche dal
2
punto di vista fisico. L'elemento mobile in generale tende a tornare nella configurazione di riluttanza
minima β = 0 .
Quindi per 0 < β < π
esso tende ad effettuare una rotazione opposta a quella antioraria assunta
2
convenzionalmente positiva, dunque anche la coppia risulta essere negativa. Viceversa per
π
< β < π la coppia che tende a riportare l'elemento mobile nella posizione iniziale è concorde col
2
verso scelto convenzionalmente positivo, dunque anche la coppia risulta essere effettivamente
positiva.
Questo ci fa capire che le posizioni β = 0 e β = π sono posizioni stabili, infatti un piccolo
spostamento del rotore da queste posizioni fa reagire il sistema in modo tale da riportare il rotore
nella posizione stabile.
10
Le posizioni
β=
π
e
2
β=
3π sono posizioni instabili, infatti un piccolo spostamento del rotore da
2
queste posizioni fa reagire sistema in modo tale da riportare il rotore in una situazione di minima
riluttanza, quindi per β = 0 e β = π
Alimentazione a tensione costante
Ipotizziamo ora di alimentare il nostro sistema elettromeccanico con una tensione costante. A regime
Vs , anche il flusso concatenato con le spire
avremo una corrente negli avvolgimenti pari a
Is =
Rs
risulterà essere costante.
La coppia elettromagnetica nelle condizioni di equilibrio risulterà essere uguale e opposta alla coppia
meccanica (per l'equilibrio
dω
= 0 con ω =cost ). Si ha quindi: Te = −Tm
dt
Se elimino la coppia meccanica (Tm=0) il sistema tenderà a porsi in una configurazione in cui la
coppia elettromagnetica è nulla. Questa configurazione si ottiene quando dL
, ovvero quando L
=0
dβ
è massimo e quando
ℜ
è minimo dℜ(β )
dβ
= 0 . Questa configurazione si ha quando l'elemento
mobile risulta essere perfettamente allineato con le espansioni polari dello statore, infatti la coppia è
pari a T = −φ 2ℜ sin 2β e per uno sfasamento β = 0 e β = π il valore della coppia è nullo.
e
b
Come prima si vede che il sistema tende a portarsi nella configurazione di minima energia.
Alimentazione a tensione sinusoidale
Vediamo ora cosa succede se alimentiamo il sistema con una tensione sinusoidale.
Dalla relazione di equilibrio del circuito elettrico si ha: V = R I − E = R I + dλ
s
s s
s s
dt
Se ipotizziamo che la caduta di tensione sul resistore sia trascurabile otteniamo: V = dλ
s
dt
Il valore del flusso è dunque noto in quanto può essere ottenuto con una semplice operazione di
integrazione. Ponendo V = 2V cosωt si avrà:
s
dφ
1
1
2V
⇒φ =
sinωt =φˆ sinωt
∫Vs (t )dt =
∫ 2V cosωt dt =
dt
Ns
Ns
N sω
Noto il flusso possiamo ricavare il valore della coppia elettromagnetica T
e
λ = Nsφ ⇒ Vs = Ns
11
1 dℜ(β )
1
dℜ(β )
= − φˆ2 sin2 ωt
Te = − φ 2
2
dβ
2
dβ
Dato che cos 2α = 1− 2sin2 α ⇒ sin 2 α = 1− cos 2α allora il valore ella coppia è:
2
1
dℜ(β )
1
Te (t, β ) = − φˆ 2 (1− cos 2ωt )
= − φˆ 2ℜb (1−cos 2ωt )sin 2β
4
dβ
2
La coppia elettromagnetica è costituita dunque
da due termini, uno costante e uno oscillante.
1 dℜ(β ) 1 ˆ 2
dℜ(β )
Te = − φˆ 2
+ φ cos(2ωt )
β3
dβ4 1
4 444244d4
1442
4 43
ter min e cos tan te
ter min e oscillante
Sostituendo il valore delle riluttanza
1
1
Te = − φˆ 2ℜb sin 2β + φˆ 2 cos(2ωt)ℜb sin 2β
2 444
12442443 1
424444
3
ter min e cos tan te
ter min e oscillante
Il termine oscillante di coppia fornisce
un’energia
meccanica
alternativamente
positiva e negativa, quindi con valore medio
nullo.
È evidente che l'effetto di questa coppia è una semplice vibrazione, la cui entità diminuisce al
crescere del momento di inerzia.
Considerando la sola copia oscillante si vede che:
T puls = j
dove
dω~
dω~ T puls
1t
⇒
=
⇒ ω~ = ∫ T puls dt
dt
dt
j
j0
T
1
dℜ(β )
T puls = − φˆ 2 cos 2ωt
⇒ ω~ = max sin 2ωt
4
dβ
jω
~
La pulsazione di oscillazione ω risulta essere inversamente proporzionale al momento di inerzia j
della macchina e alla frequenza di alimentazione del sistema ω. Dunque se la massa del sistema e la
frequenza di alimentazione sono sufficientemente elevate ne consegue che il termine oscillante il
risulta essere trascurabile. Quindi il sistema meccanico tramite la massa e la frequenza di
alimentazione fungono da filtro per i termini oscillanti di coppia.
2
La coppia media risultante è quindi la seguente:
V
Tmedia = −
ℜb sin 2β
N
ω
s
Anche in questo caso, come nel caso precedente, se ipotizziamo di essere in condizioni di equilibrio
si avrà che il sistema svilupperà una coppia media che tende ad equilibrare perfettamente la coppia di
carico e dunque si posizionerà su una posizione β per cui si ha l'equivalenza tra le coppie.
Macchine in rotazione ωm non nulla e alimentazione sinusoidale
Sinora abbiamo sempre fatto riferimento alla macchina elettrica in condizioni statiche, a noi però
interessano le macchine rotanti, dunque vediamo cosa succede quando esse ruotano con una velocità
angolare costante ω ≠ 0 .
m
Ipotizziamo che la tensione di alimentazione sia di tipo sinusoidale V = 2V cosωt .
s
12
Il valore della velocità meccanica è legata alla posizione β tramite la seguente relazione ω = dβ .
m
Da questa, integrando si ottiene:
dt
β = ∫ ω m dt + β 0 ⇒ β = ω mt + β 0
con
β0
posizione
dell'elemento mobile all'istante iniziale t = 0 o meglio, è l'angolo di sfasamento tra i due assi di
riferimento quando la macchina è a regime.
La coppia prodotta risulta essere:
1 dℜ(β )
1
dℜ(β ) ; essendo dℜ
= − φ 2 1− cos 2ω t
= 2ℜ sen(2β ) si ha:
T = − φ2
(
s
)
b
dβ
2
dβ
4 max
dβ
1 2
2 1+ cos(− 2ω t ) ℜ sin 2(ω t + β )
T = − φmax
[1− cos(2ωs t )]ℜb sin(2β ) = − 1 φmax
[
s ] b
m
0
2
2
1 2
T = − φmax
ℜb sin 2(ωm t + β 0 ) + cos(−2ω s t ) sin 2(ωm t + β 0 )
2
Sviluppando i calcoli con le formule di Werner cosα sin β = 1 [sin(α + β ) −sin(α − β )] si ottiene:
2
1
1
1 2
T = − φmax
ℜb sin 2(ω m t + β 0 ) + sin 2(−ω s t +ω m t + β 0 ) + sin 2(−ω s t −ω m t − β 0 )
2
2
2
[
]
T
L’espressione della coppia è data da tre addendi sinusoidali, che hanno valor medio pari a zero.
1
Affinché la coppia media sia diversa da zero T
= ∫Tis tan tan ea dt ≠ 0 e quindi si abbia un
media
T
0
valore di coppia utile bisogna fare in modo che qualcuno di questi tre termini risulti essere costante e
indipendente dal tempo. Infatti avendo una coppia media pari a zero T
= 0 la potenza
media
meccanica media, associata a questa coppia, risulta essere pari a zero P = T
ω = 0 quindi non
me
media m
abbiamo una conversione di potenza elettrica in potenza meccanica.
La condizione di coppia alternativa, applicata sul sistema, deve essere una condizione da evitare o
almeno si deve cercare di ottenere, tra i tre termini che compongono la coppia, almeno uno costante
nel tempo, in questo caso la coppia media sarà sicuramente diversa da zero.
Ciò è possibile ponendo ω = ω . In questo caso si ottiene infatti:
s
m
1 2
1 2
1 2
T = − φmax
ℜb sin 2(ωst + β0 ) − φmax
ℜb sin(2β0 ) − φmax
ℜb sin 2(−2ωst − β0 )
2
4
2
Due termini hanno andamento sinusoidale nel tempo quindi danno contributo medio nullo. Il
secondo addendo invece risulta costante nel tempo e rappresenta quindi il valore di T
media
1 2
Tmedia = − φmax
ℜb sin (2β 0 )
4
Porre
ω s = ωm
significa avere velocità di alimentazione e meccanica uguali e dunque avere una
macchina sincrona.
A seconda del valore di
β 0 la macchina potrà inoltre produrre coppie positive o negative, nel primo
caso essa funzionerà da motore, nel secondo invece da generatore.
Questo tipo di macchina prende il nome di macchina ha riluttanza variabile e come dimostrato dai
calcoli essa funziona solo nel caso si abbia una condizione di sincronismo.
Sotto questa ipotesi abbiamo visto che la coppia prodotta ha un termine costante e rappresenta la
coppia media effettiva. I valori di coppia istantanea, tuttavia sono costituiti anche da due termini
sinusoidali nel tempo, dunque la coppia istantanea risulta essere variabile e non costante, quindi per
ottenere una velocità di rotazione costante è necessario che l'inerzia della macchina sia tale da filtrare
le coppie oscillanti. Un'altra caratteristica importante di queste macchine è che esse non sono
macchine auto-avvianti, infatti esse non raggiungono la velocità di sincronismo naturalmente ma
13
hanno bisogno di appositi dispositivi di avviamento che portino il rotore a ruotare alla velocità
sincrona. Questa caratteristica vale in generale per tutte le macchine sincrone, per cui ogni macchina
avrà un dispositivo di avviamento.
Un'altra caratteristica importante è che esse possono funzionare sia da motore che da generatore. In
particolare se l'angolo β risulta essere negativo, cioè se l'elemento mobile risulta essere in ritardo
0
quando il flusso raggiunge il valore massimo, allora la macchina funzionerà da motore, nel caso
opposto invece funziona da generatore. L'angolo β è l'angolo che ha l'elemento mobile nel nostro
0
sistema quando il flusso raggiunge il suo massimo. Se l'elemento è in ritardo ciò significa che
l'angolo β è negativo e in questa situazione la coppia prodotta tende a portare l'elemento mobile
0
nella condizione di riluttanza minima, quindi essa avrà verso concorde con la velocità di rotazione.
La coppia risulta quindi essere positiva (sia dal punto di vista fisico che analitico) e ciò equivale a un
funzionamento da motore.
Viceversa, se l'elemento mobile risulta essere in
anticipo, la coppia elettromagnetica nel tentare
di portare l'elemento mobile nella condizione di
riluttanza minima risulterà essere discorde con il
verso di rotazione. A questa configurazione
corrisponde un funzionamento da generatore.
Tuttavia questo tipo di macchina non è conveniente utilizzava come generatore. Infatti la corrente
ℜφ , doveφ risulta imposto dalla tensione di alimentazione
risulta essere:
f .m.m. = N si = ℜφ ⇒ i =
Ns
e ℜ risulta invece: ℜ = ℜ −ℜ cos(2β ) con β = ω t + β sostituendo si ottiene:
a
b
m
0
i=
φ max
; sviluppando i conti con formule trigonometriche si ottiene
sin ωst [ℜ a − ℜ b cos 2(ω m + β 0 )]
Ns
che la corrente presenta due componenti sinusoidali di uguale frequenza e una di frequenza tripla
(cioè una terza armonica).
ℜ φ
ℜ φ
ℜ φ
i = a max sin ωst − b max sin(ωst + 2ωmt + 2β 0) − b max sin(ωst − 2ωmt − 2β0 )
Ns
2N s
2N s
Per le caratteristiche di funzionamento della macchina si deve avere cheω = ω allora:
s
m
ℜ φ
ℜ φ
ℜ φ
i = a max sin ωst − b max sin(3ωst + 2β0 ) − b max sin(−ωst − 2β0 )
Ns
2N s
2N s
Questa componente ℜb φmax
è dannosa perché va a deformare le grandezze di rete,
sin(3ωst + 2β 0 )
2N s
proprio per questo motivo le macchine sincrone di tipo monofase non vengono mai utilizzate come
generatori.
Eccitazione sullo statore e sul rotore
14
Consideriamo ora la stessa macchina, però con
due circuiti elettrici. Oltre al circuito
eccitatore, posto attorno alla struttura fissa,
poniamo un altro circuito elettrico attorno alla
struttura rotorica. Per l’equazione di equilibrio
energetico si ha:
ipotizziamo che
dW = dW + dW
e
mg
me
l'energia
dWe
meccanica sia nulla, allora
l'energia elettrica è facilmente
= dW
mg
calcolabile e risulta:
dWe = −(es is dt + er ir dt )
Per quanto riguarda l'energia magnetica essa
dipenderà dalle correnti di rotore e statore e
dalla particolare configurazione magnetica del
sistema.
Ipotizzando che la magnetizzazione avvenga in due fasi, prima tenendo i nulla e portando i da
r
is
zero al suo valore finale, poi tenendo
Incominciamo portando
is
che
In
questo
er = −
ir
r
is con ir = 0
λs = Lssis + Lsrir
dλ s
d ( Lss is + Lsr ir )
=−
dt
dt
is
1
⇒ We1 = ∫ Lss is dis = Lssis2
2
0
allora
es = −
dWe1 = −esisdt = Lssisdis
Portiamo ora
costante e portando i da zero al suo valore finale.
da zero a
In questo caso il flusso è pari a:
Dato
s
da zero a
caso
il
ir
mentre
flusso
è
is = cos t
pari
a:
λ r = L rr i r + L rs i s
Dato
che
d ( Lrr ir + Lrs is )
dλ r
=−
dt
dt
allora dW = −e i dt − e i dt = L i di + L i di
e2
ss
rr
rs s r
rr r r
⇒ We2 =
ir
∫
0
(Lrs is dir + Lrr ir dir )= Lrs is ir + 1 Lrrir2
2
L'energia magnetica associata ad uno stato è pari a:
1
1
Wmg = Lssis2 + Lrsisir + Lrrir2
2
2
Lss
risulta essere il coefficiente di autoinduzione degli avvolgimenti di statore
Lrr
è il coefficiente di autoinduzione delle rotore e
Lsr
è il coefficiente di mutua induzione tra
statore e rotore.
Questi coefficienti sono dipendenti da β , ovvero dalla configurazione magnetica del sistema.
Per calcolare la variazione di energia meccanica utilizziamo l'equazione di bilancio energetico
dWme = dWe − dWmg
Per poterla calcolare dovremmo conoscere le potenze elettriche e magnetica in gioco.
Per calcolare la potenza elettrica applichiamo l'equazione di equilibrio elettrico e moltiplichiamo per
le rispettive correnti.
15
Pe s = vtsis = Rsis2 + is
d (Lssis + Lsr ir )
dt
e
Pe r = vtrir = Rrir2 + ir
d (Lrs is + Lrr ir )
dt
La potenza istantanea netta, quindi a meno delle perdite, sviluppata da ciascun generatore sarà:
d (Lss is + Lsr ir )
⇒ P = P + P
dt
e
es
er
d (Lsr is + Lrr ir )
Pe r = ir
dt
Pe s = is
Per il calcolo della potenza magnetica, applichiamo la relazione della variazione di energia
magnetica rispetto al tempo.
Pmg =
dWmg
dt
1
1
d Lss is2 + Lrs i s ir + Lrr ir2
2
= 2
dt
Arriviamo quindi all'espressione della potenza meccanica.
Pme = Pe − Pmg =
is2 dLss
dL i 2 dLrr
+ is ir rs + r
2 dt
dt 2 dt
La potenza meccanica per definizione è anche uguale al prodotto T ⋅ v , dato che la velocità è uguale
alla derivata di β rispetto al tempo, si avrà:
dβ
dt sostituendo il valore di P trovato precedentemente si
P = T ⋅ω = T
⇒T = P
me
ottiene T
m
=
dt
me
me
dβ
is2 dLss
dL
i 2 dL
+ isir sr + r rr
2 dβ
dβ 2 dβ
Come si può vedere dalla relazione appena scritta, la coppia elettromagnetica risulta essere composta
da due coppie di riluttanza, relative allo statore e al rotore, più un'altra aliquota data dall'interazione
tra l'avvolgimento di statore e quello di rotore. Come abbiamo visto, per poter produrre una coppia
media costante e diversa da zero bisogna verificare le condizione di sincronismo. Questa condizione
non può essere sempre verificata contemporaneamente sia per il rotore che per lo statore, quindi per
avere una conversione di energia efficiente uno dei due termini di coppia di riluttanza dev'essere
posto uguale a zero. Ciò è realizzabile facendo in modo che il corrispondente termine di
autoinduzione risulti essere costante. Affinché il termine di autoinduzione resti costante al variare di
β si utilizzano strutture cilindriche.
In questo modo, se lo statore è cilindrico,
Lrr
risulta sempre costante e di conseguenza il termine di
coppia di riluttanza del rotore si annullerà. Questo perché al
variare di β il circuito magnetico visto dal rotore risulta
invariato, cioè il traferro visto dal nostro elemento mobile è
sempre lo stesso, quindi le linee di flusso percorreranno sempre
lo stesso tratto d'aria.
In questo modo la coppia media risultante sarà data dal termine
di coppia di riluttanza statorica sommato al termine di coppia di
interazione tra statore e rotore. Questo schema di macchina è
quello relativo alle macchine sincrone a poli salienti.
T=
16
is2 dLss
dL
+ isir sr
2 dβ
dβ
Nel caso in cui, si voglia costruire una macchina che funzioni in una condizione di asincronismo
bisogna annullare anche l'altro termine di coppia di riluttanza. Ciò si effettua facendo in modo che
anche
Lss
risulti essere costante. Per far ciò bisogna costruire
anche il rotore di forma cilindrica.
In questo caso l'unico termine di coppia rimasto sarà quello di
interazione tra rotore e statore, si avrà quindi: T
= is ir
dLsr
dβ
Come si vede in questo caso la coppia non è legata alle
condizione di sincronismo, questo perché non abbiamo più le
due coppie di riluttanza.
Struttura della macchina
la macchina elettriche isotropa è costituita da una parte fissa chiamata statore e da una parte mobile
chiamata rotore, questo è mantenuto coassiale con lo statore grazie a dei cuscinetti, la distanza tra
rotore e statore è quindi fissa ed è chiamata traferro.
Sia il rotore che lo statore sono fatti con materiali ferromagnetici, questo perché si vuole far seguire
alle linee di flusso prodotte un evoluzione all'interno del traferro e del ferro di macchina. Saranno
quindi presenti un avvolgimento sul rotore e uno sullo statore. Alimentando uno di questi
avvolgimenti creiamo un campo magnetico.
Gli avvolgimenti vengono generalmente dislocati in prossimità della zona in cui avviene il processo
di conversione dell’energia, questo avviene principalmente nel traferro. Andremo quindi a disporre
gli avvolgimenti di rotore e di statore in modo tale che siano il più vicino possibile alla zona nella
quale avviene lo scambio energetico, saranno quindi disposti sulla superficie di statore e di rotore che
si affaccia al traferro.
Dall'espressione della coppia T = is ir
dLrs
dβ
si vede che dobbiamo analizzare i processi di scambio
energetico fra le correnti di rotore e quelle di statore, quindi i rispettivi avvolgimenti andranno posti
sulla superficie che si affaccia al traferro dove sia il campo che l'energia associata risulta essere
massima. Concentreremo quindi le nostre attenzioni sul traferro.
17
18
Consideriamo una macchina elettrica isotropa, come quella descritta precedentemente, avente un
unico avvolgimento elettrico sullo statore costituito da una sola matassa. Per allocare tale
avvolgimento è necessario realizzare degli spazi appositi sulla superficie di statore denominati cave.
Ogni parte dell'avvolgimento ha un nome ben preciso:
i lati attivi di matassa sono la parte dell'avvolgimento che si affaccia al traferro e quindi sono
quindi le parti che permettono l’interazione tra il campo magnetico e la corrente circolante in
essi (di conseguenza partecipano attivamente al processo di conversione dell'energia);
le connessioni frontali sono le parti dell'avvolgimento che collegano due lati attivi di matassa,
essi hanno il solo compito di far circolare una corrente nell'avvolgimento.
Le matasse hanno sempre un principio P e una fine F.
Poiché ciascuna matassa presenta solo due lati attivi di matassa, la nostra macchina elettrica sarà
dotata di due sole cave. Ipotizziamo che le cave siano uniformemente distribuite sullo statore e
quindi la distanza tra una cava e la cava successiva risulta essere pari a π (in termini angolari ) o πR
(in termini lineari ). Alimentando l'avvolgimento statorico con un generatore di tensione costante,
analizziamo cosa accade nel funzionamento a regime. Ciascuna spira della nostra matassa sarà
percorsa da una corrente Is che determinerà una f.m.m a cui corrisponde una distribuzione di campo.
La presenza di un campo magnetico e la circolazione di correnti negli avvolgimenti producono delle
forze che agiscono sui conduttori facendoli uscire dalle cave. Per evitare che i conduttori escano
dalle cave, queste vengono chiuse con dei materiali isolanti aventi una forte resistenza meccanica.
Questi materiali devono avere una permeabilità magnetica che risulti essere uguale a quella dell'aria
in modo tale che il comportamento delle linee di flusso non venga influenzato dal materiale che va a
chiudere la cava.
19
Per la legge di solenoidalità le linee di campo dovranno essere chiuse, quindi presenteranno una
evoluzione come riportato in figura:
Applicando la regola della mano destra, e considerando con la × le correnti entranti e con il le
correnti uscenti, si vede immediatamente che nella cava 1, ad una corrente entrante, corrisponde una
linea di flusso orientata in senso orario, invece nella cava 2 , ad una corrente uscente, corrisponde una
linee di campo orientata in senso antiorario. Si può notare immediatamente come l'evoluzione delle
linee di flusso all'interno del ferro risultano essere particolarmente complicate, visto che devono
sempre seguire il percorso a minima riluttanza e di conseguenza il cammino avente la più breve
distanza. A noi però, interessa definire quale risulta essere l'evoluzione del campo magnetico al
traferro, perciò utilizziamo la legge di rifrazione delle linee di campo. Tale legge afferma che
qualunque sia l'angolo d'incidenza delle linee di campo all'interno del nucleo ferromagnetico, una
volta che queste escono in aria presentano una direzione che risulta essere ortogonale alla superficie
di separazione ferro-aria. Quindi possiamo sicuramente affermare che linee di campo uscenti dalla
statore ed entranti nel traferro presenteranno una direzione che risulta essere ortogonale alla
superficie di separazione ferro-aria e di conseguenza possiamo affermare che le linee di campo
possono essere considerate ad evoluzione di tipo radiale.
Si nota inoltre che dalla cava 1 alla cava 2 le linee di campo risultano essere tutte uscenti, mentre
dalla posizione 2 a quella 1 le linee di campo risultano essere tutte entranti nella superficie di statore
che si affaccia al traferro. Generalmente, quando linee di campo risultano essere uscenti da una
superficie presa come riferimento, il relativo polo magnetico prodotto viene denominato polo nord,
mentre nelle zone nella quale le linee di campo risultano essere entranti, il polo magnetico viene
denominato polo sud. Abbiamo perciò prodotto un bipolo magnetico all'interno della macchina. Si
nota che le superfici del polo nord (linee di campo entranti) e del polo sud (linee di campo uscenti)
sono identiche, questo perché abbiamo distribuito la matassa in maniera simmetrica. Visto che il
materiale ferromagnetico è caratterizzato da una permeabilità magnetica che risulta essere
notevolmente superiore rispetto a quella dell'aria, possiamo affermare che la f.m.m applicata dalla
nostra matassa per sostenere il campo magnetico così descritto, sarà dedicata principalmente a
vincere le cadute di tensione magnetica che le linee di flusso devono sopportare nell'attraversare il
20
traferro. Quindi in prima approssimazione potremo ritenere che le cadute di tensione magnetica
sopportate dalle linee di flusso nel ferro risultano essere trascurabili rispetto a quelle presenti in aria.
Andiamo ad analizzare la macchina elettrica nella sua tridimensionalità, poiché quello che abbiamo
rappresentato fino ad adesso risulta essere esclusivamente la sua rappresentazione lungo uno dei
possibili piani ortogonali all'asse di rotazione, ma di questi piani ce ne sono infiniti, uno per ciascuna
sezione della macchina. Essendo la macchina tridimensionale anche il campo magnetico sarà
tridimensionale, perciò ci chiediamo se il campo sia uguale a se stesso in ogni sezione della
macchina. Questo è vero nelle zone interne poiché in esse le componenti assiali del campo magnetico
risultano essere trascurabili mentre, a causa degli effetti di bordo, non è vero sulle parti terminali
della macchina. Questo effetto di tridimensionalità del campo possiamo trascurarlo in prima
approssimazione e dire che, se trascuriamo gli effetti di bordo, in ciascuna sezione della macchina il
campo risulta avere la stessa evoluzione. Quindi invece di analizzare il campo della macchina in tutta
la sua tridimensionalità, potremo analizzarlo semplicemente su un unico piano, perché in prima
approssimazione si ripete uguale a se stesso in tutti gli altri. Quindi passiamo da un studio
tridimensionale ad uno bidimensionale dove vengono trascurate quelle che sono le componenti del
campo magnetico lungo l'asse di rotazione, questo è tanto più vero quanto più grande è l'asse assiale
rispetto alla dimensione radiale. Andiamo ad analizzare ciò che avviene all'interno del traferro,
ricordando che le linee di campo risultano essere ortogonali alle superfici di separazione ferro-aria e
presentano un'evoluzione di tipo radiale. Perciò prendiamo in considerazione un generico tubo di
flusso, come rappresentato in figura:
Da questa rappresentazione si vede che, se il raggio dello statore e il raggio del rotore non risultano
essere confrontabili, il tubo di flusso nel passare dalla superficie di statore a quella di rotore subisce
un restringimento, quindi la sezione del tubo di flusso sullo statore e sul rotore risultano essere
differenti. Ma il tubo di flusso è caratterizzato da un valore di flusso costante, perciò avremo che il
campo magnetico al traferro in prossimità della superficie di statore assumerà un valore differente
rispetto al valore assunto sulla superficie di rotore. Questo vuol dire che il campo magnetico
all'interno del traferro subisce delle variazioni e di conseguenza non potremo più parlare di unico
valore del campo magnetico al traferro ma dovremo considerare un campo magnetico al traferro
dipendente dalla distanza tra rotore e statore, avremo una distribuzione bidimensionale del campo.
Realizzando il raggio di rotore e di statore in modo tale che siano molto vicini, cioè se il traferro
risulta essere notevolmente più piccolo rispetto al raggio di statore (Rs>>δ), si può ritenere che
questo effetto risulta essere praticamente inesistente e quindi i tubi di flusso nel passaggio dallo
statore al rotore non modificano la loro sezione. In queste condizioni il valore del campo, sia sulla
superficie di statore che su quella di rotore, a parità di ascissa curvilinea, è uguale e di conseguenza
possiamo quindi passare da uno studio di tipo bidimensionale a uno monodimensionale. Tenendo
conto delle precedenti considerazioni, si potrà effettuare lo studio analizzando la macchina nella sua
configurazione effettiva (su scala cilindrica) oppure potremo eseguire lo studio della macchina
elettrica linearizzata. Per poter eseguire lo studio della macchina linearizzata è necessario definire un
sistema di riferimento. Come sistema di riferimento sceglieremo i due assi così ricavati:
21
il segmento che parte dall'asse di rotazione della macchina e che attraversa la cava che
abbiamo indicato con 1;
l’asse curvilineo, che partendo dalla cava 1 in senso orario, segue perfettamente la superficie
di statore che si affaccia al traferro, indichiamo questa ascissa curvilinea con Xs.
Come si vede dalla figura possiamo riferirci sia alle ascisse curvilinee che agli angoli. Lo studio della
macchina può essere più semplice se andiamo a fare una linearizzazione della superficie della
macchina, questa consiste nell'aprire la macchina fino a farla diventare lineare.
La lunghezza totale della macchina linearizzata sarà 2πR.
Analisi dell’evoluzione delle grandezze magnetiche al traferro
Adesso dovremo determinare le grandezze magnetiche presenti nella macchina, prima alimentando
lo statore e poi alimentando il rotore. Si analizzerà quindi la loro distribuzione e quale tra queste
grandezze rappresenta meglio e in modo univoco il comportamento della macchina elettrica.
Ipotizziamo di alimentare il i soli avvolgimenti di statore e di voler determinare il campo magnetico
in queste condizioni di funzionamento, ma per far questo è necessario concentrare la nostra
attenzione sulla sua causa che genera il campo all’interno della macchina cioè la f.m.m.
Le f.m.m sono definite rispetto ad una curva γ , dato che risultano essere pari alla corrente che si
concatena con la curva prescelta. Perciò scegliamo come curva di riferimento quella riportata di
seguito:
22
Scegliamo come verso di percorrenza
della curva γ , indicato in figura, il verso
stabilito dall'applicazione della regola
della mano destra sulla cava 1. Fissato il
verso della curva γ è definito anche il
verso della corrente concatena positiva,
in questo caso il senso positivo è quello
entrante. Ricaviamo adesso l'andamento
di tale curva nella macchina linearizzata
Una volta definita la curva di riferimento è possibile ricavare la f.m.m:
f .m.m = NS ⋅ is
In questa maniera otteniamo un'evoluzione della f.m.m al variare della posizione del
lato mobile e perciò al variare dell'ascissa curvilinea Xs o della posizione angolare β:
23
La f.m.m. concatenata con la curva γ è costante tra 0 e π ed è nulla tra π e 2π. Questo perché spostando
il tratto mobile CF, a partire dalla posizione GB, otteniamo una curva nella quale la corrente concatenata
risulta essere pari alla corrente presente nella prima cava , quindi la f .m.m = N S ⋅ is . Man mano che il
lato CF si sposta lungo l’ascissa curvilinea abbiamo che la corrente concatenata risulta essere sempre la
stessa e con verso positivo. Questo è vero sino a quando non si arriva a x=πR, in questo punto avremo
che la corrente concatenata con la curva risulta essere data dalla somma della corrente entrante nella
prima cava più la corrente uscente nella seconda. Le due f.m.m sono quindi uguali e opposte, quindi
avremo un valore di f.m.m totale pari a zero sino a x=2πR.
Questa analisi ci mostra che la distribuzione di f.m.m non risulta essere costante, ma risulta essere
variabile in funzione della coordinata o dell'ascissa curvilinea che abbiamo preso in considerazione. Per
dimostrare ciò che è stato appena detto andiamo a prendere un altro punto di riferimento da associare al
lato fisso GB.
In questo caso si nota che al variare del lato CF dal punto iniziale, in cui è sovrapposto al lato GB, sino a
x=πR la f.m.m ha valore nullo, infatti nella curva non si concatena nessuna corrente. Continuando a far
variare la posizione del lato mobile della curva si vede che tra πR < x< 2πR otteniamo f .m.m = − N S ⋅ i s
infatti la corrente concatenata con la curva ha verso discorde rispetto a quello scelto tramite la regola
della mano destra. Nell’ultimo tratto tra x= 2πR sino a tornare al punto di partenza la f.m.m. è la somma
di due correnti uguali e opposte per il numero di spire, avrà quindi un valore nullo
f .m.m = N S ⋅ (− i s + i s ) = 0
24
Scegliendo diverse curve la distribuzione di f.m.m risulta essere diversa, questo ci fa capire che il valore
che otteniamo risulta essere dipendente dal riferimento scelto, conviene quindi riferirci a funzioni che
non dipendono dal riferimento scelto.
Tenendo conto delle semplificazioni già viste prima, campo H costante dentro il traferro e cadute di
tensione magnetica trascurabili nel ferro (quindi i percorsi ABCD e EFGH hanno cadute di tensione
magnetica nulla), possiamo trovare i valori del campo H e B applicando la legge della circuitazione
magnetica, per una generica posizione x:
∫ H o d l =ncs i
γ
Per risolvere questo integrale è necessario stabilire il verso positivo di H. Generalmente scegliamo come
valore positivo il verso delle linee di flusso uscenti della statore e entranti nel rotore, perciò secondo la
convenzione dei poli Nord.
Seguendo questa convenzione avremo che:
∫ H o d l = H ( x)δ − H (0)δ = ncs i
γ
Di
conseguenza
H ( x ) = H ( 0) +
avremo
ncs i
δ
che
= H ( 0) +
il
campo
H(x)
risulta
essere
pari
a:
fmm ( x )
δ
Questa relazione ci mette in evidenza che la distribuzione del campo H(x) risulta essere strettamente
legata al valore di H(0) assunto nel riferimento. Ma non sappiamo anche che il campo H(x) non può
essere dipendente da un riferimento, è la f.m.m, a cui esso è legato, che è dipendente dal riferimento.
Perciò deve esistere un altra relazione che mi consente di ricavare il valore di H(x) in forma chiusa.
Questa condizione non è altro che la legge di solenoidalità del campo:
∫ B o ds = 0
Σ
Scegliamo come superficie chiusa la superficie cilindrica interna al traferro, come si vede in figura:
25
La superficie elementare sarà: d s = dx ⋅ l a ⋅ u n oppure in funzione degli angoli d s = R ⋅ dβ ⋅ l a ⋅ u n
dove un è il versore normale alla superficie.
Dato che i vettori
allora:
B, ds sono paralleli il prodotto scalare diventa un semplice prodotto tra i moduli,
2πR
∫ B o d s = 0 ⇒ la ∫ B( x)dx = 0
0
Σ
2π
Oppure
∫ B o d s = 0 ⇒ Rla ∫ B( β )dβ = 0
Σ
con dx = R ⋅ dβ
0
Abbiamo trascurato le superfici cilindriche frontali perché in quei punti possiamo ritenere il campo
nullo.
26
2πR
∫ H ( x)dx = 0
Dalla relazione B = µH si ottiene
0
Dato che il campo H presenta un andamento simile alla caduta di f.m.m. possiamo dire che questo ha un
andamento costante e pari al campo preso nel punto di riferimento H(0) tra 0<x<πR , invece tra πR <
x<2πR il campo è sempre costante e pari a un generico H(x). Il campo è quindi costante a tratti andiamo
allora a dividere l'integrale.
πR
2πR
0
R
∫ H (0)dx + π∫ H (πR)dx = 0
H (0)πR + H (πR )πR = 0 ⇒ H (0) = − H (πR )
Risolvendo:
Ricordando che H ( x) = H (0) +
H (πR) = H (0) +
nc i
δ
ncs i
δ
si
= − H ( 0) ⇒ H ( 0) = −
ricava
nc i
2δ
Noto il valore di H(0), possiamo ricavare la distribuzione del campo H, infatti:
nc i
H ( x) = 2δ 0 < x ≤ πR
ni
H ( x) = − c πR < x ≤ 2πR
2δ
Oppure in funzione degli angoli
nc i
H ( β ) = 2δ 0 < β ≤ π
ni
H ( β ) = − c π < β ≤ 2π
2δ
Come mostrato in figura il campo H ha una evoluzione a onda quadra. Potevamo arrivare allo stesso
risultato, tramite la legge della circuitazione magnetica e la condizione di solenoidalità.
La circuitazione magnetica ci dice che il campo H ha una distribuzione uguale a quella della f.m.m a
meno di una costante, la condizione di solenoidalità ci dice che la superficie sottesa dalla distribuzione H
da 0 a 2π deve essere uguale 0. Basta quindi traslare il grafico in modo tale che le aree positive siano
uguali a quelle negative per trovare H, il segno verrà dato dalle convenzioni usate, se le linee di flusso
sono uscenti avremo un campo positivo, viceversa avremo valori di campo negativi.
27
Non abbiamo ancora la corrispondenza tra la f.m.m e l'intensità del campo H, dobbiamo infatti avere una
funzione indipendente da δ (dimensione geometrica delle traferro) e dipendente solo dalla f.m.m in
modo tale da ricavare direttamente da distribuzione del campo H.
Definiamo allora, nota la f.m.m , la caduta di f.m.m (∆F) questa per definizione è il prodotto
dell’intensità di campo H per il traferro δ:
∆F ( β ) = H ( β )δ
allora ∆F (0) = −
nci
nc i
; ∆F (π ) =
2
2
La conoscenza della caduta di f.m.m ∆F viene determinata direttamente dalla distribuzione di f.m.m
applicando la condizione di solenoidalità.
Ora abbiamo un legame diretto tra la f.m.m e la caduta di f.m.m (non è più dipendente dalle
caratteristiche geometriche della macchina). Nota la ∆F e la f.m.m riusciamo a ricavare i campi H e B.
Infatti nota la f.m.m tramite una costruzione geometrica ricaviamo la ∆F ( β ) moltiplicando per delle
semplici costanti geometriche otteniamo H ( β ) =
∆F ( β )
δ
e B(β ) =
µ0
∆F ( β )
δ
Questa analisi ci fa vedere che per arrivare al valore del campo magnetico partendo dalla distribuzione
di f.m.m abbiamo la necessità di conoscere il valore di una costante di riferimento, che si riferisce al
particolare percorso chiuso utilizzato nei calcoli. Se invece svolgiamo il calcolo rispetto alla ∆F ci
svincoliamo dal dover calcolare questo riferimento. In più la ∆F é rappresentativa della distribuzione di
corrente e quindi della causa che produce il campo magnetico all'interno del nostro traferro.
Finora abbiamo visto la caduta di forza magnetomotrice ∆F ( β ) e il campo H dovute ad un
avvolgimento statorico, ora dovremo effettuare uno studio analogo per un avvolgimento rotorico. Si
ricorda che per l’avvolgimento statorico si hanno valori di H positivi quando le linee di flusso sono
dirette dallo statore verso il rotore, quindi per poli magnetici di tipo nord, mentre si hanno valori di H
negativi quando le linee di flusso sono entranti sulla superficie dello statore e vengono indicati come
poli sud. Facciamo circolare sull’avvolgimento elettrico, disposto sulle cave di rotore, una corrente che
28
risulta entrante sulla prima cava e uscente sulla seconda. Scegliamo un sistema di riferimento solidale
con il rotore, passante per la prima cava e avente verso di rotazione orario. Per condurre i nostri studi
rettifichiamo la macchina, cioè tagliamo la macchina lungo l’asse di riferimento e la linearizziamo:
Per ricavare la caduta di forza magnetomotrice utilizziamo lo stesso metodo visto precedentemente, cioè
scegliamo una curva γ che presenta un lato solidale con l’asse di riferimento rotorico e l’altro lato
mobile, il verso della curva γ lo definiamo applicando la regola della mano destra sulla prima cava di
rotore (in tal modo la f.m.m risulta essere positiva) e infine associamo l’intera f.m.m al lato mobile.
L’evoluzione della f.m.m risulta essere la seguente:
Non rifacciamo tutti i calcoli per trovare il campo H, poiché lo ricaviamo tramite la ∆F applicando il
principio di solenoidalità alla curva che descrive la f.m.m (trasliamo l’asse in modo da ottenere le aeree
positive uguali alle aree negative):
Quindi noto ∆F mi trovo la H semplicemente tramite la relazione H =
1
δ
∆F :
29
Infatti applicando la regola della mano destra, il valore di H è positivo tra 0 < xr< πR perché le linee di
campo sono dirette dallo statore al rotore (uscenti nello statore ed entranti nel rotore), mentre tra πR <
xr< 2πR il campo H è negativo poiché le linee di campo hanno il verso opposto. Però la polarità del
campo magnetico deve essere valutata a seconda della superficie in cui è disposto il circuito di
eccitazione, nel nostro caso è posto sul rotore. Considerando la superficie di riferimento posta al rotore e
non più quella di statore il campo magnetico tra 0 < xr< πR si definisce polo sud, perché il campo è
entrante nella superficie e tra πR < xr< 2πR si definisce polo nord, campo uscente dalla superficie.
Quindi rispetto allo statore, nel rotore si produce lo stesso campo magnetico ma con polarità opposte.
Per avere un perfetto allineamento le polarità dovranno essere per forza opposte.
Infatti se consideriamo due circuiti elettrici ,uno sullo
statore e uno sul rotore, alimentati in modo identico e
sfasati l’uno rispetto all’altro, le coppie polari dei due
circuiti si comporteranno in modo tale da ripristinare,
tramite attrazione, la situazione di equilibrio, cioè la
posizione in cui il polo nord dello statore e il polo sud
del rotore , il polo sud dello statore e il polo nord del
rotore sono perfettamente affacciati.
Studio delle grandezze elettromeccaniche di una macchina con campo al traferro ad
evoluzione discontinua
Dallo studio fatto precedentemente sappiamo che la coppia che si produce nel ripristinare l’equilibrio nel
sistema sarà:
T = is ⋅ ir
∂Lrs
∂ξ
Per ricavare la coppia è necessario valutare il coefficiente di mutuo accoppiamento Lrs. Ricaviamo
questa quantità andando a misurare, quando si alimenta un solo avvolgimento e l’altro rimane aperto, il
flusso che si concatena con l’avvolgimento aperto λ r = Lrr ir + Lrs i s con ir = 0 si ha λ r = Lrs i s nota tale
30
grandezza, si valuta il seguente rapporto:
Lrs =
λr
ir = 0
is
Imponiamo di alimentare l’avvolgimento statorico in modo tale
che la corrente abbia un verso di circolazione come quello riportato
in figura e sfasiamo l’avvolgimento rotorico rispetto allo statorico di un angolo generico ξ.
Per calcolare il flusso di mutuo accoppiamento devo stabilire un verso di rotazione preferenziale, perciò
mediante la convenzione dei pallini, individuo il morsetto dell’avvolgimento di statore e di quello di
rotore nel quale una corrente entrante produce, nel caso di avvolgimenti affacciati, flussi concordi cioè
flusso mutuamente accoppiato positivo.
Quindi per definire il sistema di riferimento rotorico, devo scegliere il morsetto per il quale il flusso di
accoppiamento è per definizione positivo. Effettuo ora l’operazione di linearizzazione, tagliamo lungo la
linea statorica e rettifichiamo la macchina:
ξ non è altro che lo sfasamento dell’avvolgimento
statorico da quello rotorico. Noi sappiamo bene quale
risulta essere la distribuzione di campo prodotto
dall’avvolgimento statorico, quando lo alimentiamo con
corrente costante, ma a noi interessa andare a calcolare il
flusso che si concatena con l’avvolgimento rotorico.
Quindi dovremo considerare la superficie Σ che si
appoggia sulla superficie della matassa come riportato
nella figura adiacente. Ricaviamo il flusso di mutuo
accoppiamento applicando la seguente equazione:
λrs = N r ∫ Bs od s
∑
Osserviamo che Il verso della superficie vettorializzata
∑ , secondo la regola della mano destra, risulta essere
concorde con il verso delle linee di campo H. Inoltre dato
che il campo magnetico e la superficie vettorializzata
hanno la stessa direzione, il prodotto scalare è pari al
prodotto dei loro moduli:
λrs = N r ∫ Bs ⋅ds
∑
L’espressione del flusso concatenato sarà dato, considerando la superficie ds come costituita
dall’elementino di lunghezza pari esattamente alla lunghezza assiale della macchina per lo spessore
infinitesimo dx (nel grafico sopra è rappresentato in rosso), dalla seguente equazione:
31
π
λ r = n r ∫ B s li dx = n r ∫ B s ( β ) Rl i d β
0
Σ
Ragionando in maniera rigorosa, ipotizziamo di avere una distribuzione di induzione prodotta dallo
statore che risulti essere ad onda quadra, alimentando lo statore la distribuzione di induzione sarà:
ns i
B
(
)
=
α
µ
0
2δ
ni
B(α ) = − µ 0 s
2δ
0<α ≤π
π < α ≤ 2π
Questo nel sistema di riferimento statorico. Nel rotore cambiamo il sistema di riferimento, quindi, è
diversa la distribuzione vista dal sistema di riferimento rotorico.
ns i
B( β ) = µ 0 2δ
n i
B( β ) = − µ 0 s
2δ
−ξ < β ≤ π −ξ
π − ξ < β ≤ 2π − ξ
Conosciamo quindi B sia rispetto allo statore che al rotore.
Calcoliamo quindi il flusso. Gli estremi di integrazione
vanno da una cava all'altra, quindi da 0 a π.
π
λ r = n r ∫ B ( β ) Rl d β
0
π
π −ξ ns i s
ni
λr = nr Rl ∫ µ 0
dβ − ∫ µ 0 s s dβ
Andando a sostituire il valore di B(β) si trova:
2δ
2δ
0
π −ξ
n i
i
λ r = n r Rl µ 0 s s [π − ξ − (π − π + ξ )] = n r n s Rl µ 0 s (π − 2ξ )
2δ
2δ
Il flusso è quindi dipendente dalla posizione tra rotore e statore, questo è giustificato dalla presenza del
termine ξ che tiene conto della posizione tra rotore e statore.
Arriviamo a definire il coefficiente di mutua induzione
Si può notare che il termine µ 0
Lrs =
λr
ir = 0
is
=
1
Rlπ
ξ
nr n s µ 0
1 − 2
2
δ
π
Rlπ
è l’inverso della riluttanza al traferro quindi è la permeanza al
2δ
traferro Γt, sostituendo si ottiene:
ξ
Lrs = n r n s Γt 1 − 2
π
ξ
ˆ
= Lrs 1 − 2
π
Dall’espressione del coefficiente di mutuo accoppiamento, si osserva che Lrs è massimo per ξ = 0 , cioè
quando i due avvolgimenti sono perfettamente allineati. Mano a mano che ξ aumenta il coefficiente di
mutuo accoppiamento diminuisce e per ξ =
π
risulta essere pari a zero, poiché gli avvolgimenti sono
2
perfettamente in quadratura di conseguenza i due flussi statorico e rotorico non si concatenano. Se si
prosegue il flusso di mutuo accoppiamento risulta essere negativo e avrà un valor minimo per ξ = π . Si
evidenzia col grafico sottostante come varia il coefficiente rotorico all’variare di ξ:
32
ξ = 0 è un punto di equilibrio stabile, poiché una spostamento infinitesimo da tale posizione determina
lo sviluppo di una coppia che mi riporta il sistema alla condizione di equilibrio. Tale coppia sarà pari a:
∂L
∂ ˆ 2ξ
2
T = i s ⋅ ir rs = i s ⋅ ir
Lrs ⋅ 1 −
= − ⋅ Lˆ rs i s ir
∂ξ
∂ξ
π
π
Se le correnti is e ir sono concordi con la convenzione dei pallini, abbiamo una coppia risultante
negativa.
Se la coppia è negativa, tenderà a spostarsi in verso opposto
al sistema di riferimento scelto, quindi si avrà una rotazione
fino a quando la matassa si porterà nel punto di equilibrio
stabile cioè ξ = 0 . Per ξ < 0 si avrà che la derivata sarà
positiva e di conseguenza la coppia sarà positiva, cioè farà
ruotare il rotore in senso orario finché il sistema non
raggiunge la condizione di equilibrio stabile ξ = 0 . Questo
è un caso semplice di conversione efficiente di energia
elettrica in energia meccanica, in cui la coppia applicata
risulta essere costante a tratti.
Diamo anche una spiegazione dal punto di vista fisico, applichiamo la legge di Lorentz
F = i ⋅l ∧ B
Nella prima cava la corrente è entrante e il campo tra
ξ e π + ξ è positivo per definizione, con la regola
della mano destra si vede che la forza ha senso
opposto a quello scelto come positivo. Nella seconda
cava la corrente è uscente e il campo ha verso opposto
a quello di prima, otteniamo quindi una forza sempre
opposta al verso positivo.
La forza totale è quindi pari a:
F = − n r ir lB s = − n r i r lµ 0
n s is
2δ
Dato che per ogni coppia polare si sviluppano due forze concordi per coppia polare, la coppia è uguale a:
33
l
2
T = 2 ⋅ F ⋅b = 2 ⋅ − n n i i µ
⋅R = −
e
π
r s r s 0 2δ
Te = −
l ⋅ πR
n r n s µ 0 2δ
2
ir i s = − n r n s Γt ir i s
π
(
)
2 ˆ
L i i
π rs s r
Abbiamo ottenuto la stessa relazione di prima. Tra statore e rotore nasce una forza di interazione che
tende a spostare il rotore in modo da allineare i campi prodotti da statore e rotore, in questo modo la
macchina non produce più coppia.
Analisi della distribuzione di caduta di f.m.m. in funzione della distribuzione dei
conduttori
Sino ad adesso abbiamo effettuato lo studio della macchina che presenta un avvolgimento di rotore e
statore costituito da una sola matassa. Bisogna analizzare come la distribuzione dell’avvolgimento sullo
statore e sul rotore, può modificare la forma del campo magnetico al traferro e in particolare mettere in
evidenza, come la distribuzione, può determinare una moltiplicazione del numero di coppie polari
oppure un cambiamento dell’evoluzione del campo magnetico al traferro. Per osservare questo, partiamo
da una macchina elettrica isotropa che possiede un avvolgimento statorico costituito da 2 matasse. Per
mantenere le caratteristiche di simmetria, distribuiamo le due matasse in maniera uniforme, questo vuol
dire che abbiamo bisogno di due cave per ogni matassa. Perciò ripartiamo in modo equo le 4 cave sulla
superficie di statore. Quindi se abbiamo una circonferenza pari a 2πR e vogliamo utilizzare un numero di
2πR πR
cave pari a quattro, avremo che la distanza tra una cava e quella successiva è pari a
=
.
4
2
π
In altre parole, l’angolo meccanico β che distanzia una cava da quella successiva è pari a β = . Si
2
tratta adesso di vedere come distribuire queste matasse. Ogni matassa presenta due lati attivi e due
connessioni frontali e la distanza tra i lati attivi è quella che in un certo senso mi definisce la dimensione
del polo e quindi il numero di coppie polari presenti all’interno della macchina. Per proseguire la nostra
analisi, ipotizziamo di considerare i lati attivi di matassa caratterizzati da una circolazione della corrente
che risulti essere di tipo alternato. Vogliamo vedere come è fatto l’avvolgimento con questa ipotesi e
anche analizzare quale sarà l’entità e la forma del campo magnetico. Consideriamo quindi un sistema di
riferimento che risulta essere coincidente con la prima cava e un sistema di riferimento solidale con la
superficie di statore che si affaccia al traferro. Andando a linearizzare la macchina otteniamo la seguente
rappresentazione:
34
Se andiamo a fare un’analisi della distribuzione della f.m.m, otterremo che la distribuzione della ∆F
risulta essere la seguente:
Per determinare la distribuzione della caduta di tensione magnetomotrice ∆F è necessario determinare,
come abbiamo fatto precedentemente, la f.m.m (tenendo conto dei versi delle correnti) e traslare l’asse
xs in modo tale che le aree positive e negative risultino essere uguali. Questo ci permette
immediatamente di notare che rispetto al caso precedente abbiamo un’alternanza di poli e quindi due
coppie polari. Per valutare come è necessario realizzare un avvolgimento che mi determina una
distribuzione di H così fatta, consideriamo la proiezione della sezione lungo l’asse di rotazione (come se
la macchina fosse vista dall’alto) e andiamo a vedere come devono essere collegati tra loro i lati attivi di
matassa:
35
Ogni matassa percorsa da corrente costituisce una coppia polare, noi vogliamo realizzare la macchina
con un unico avvolgimento, perciò la corrente entrante nella prima matassa deve essere uguale alla
corrente entrante nella seconda matassa, quindi i due avvolgimenti dovranno necessariamente essere
collegati tra di loro in serie:
Aumentando il numero di cave si osserva che si riduce la dimensione del passo polare e
conseguentemente si riduce la distanza tra i lati attivi di matassa, in particolare la distanza tra i lati attivi
di matassa e la dimensione del polo sono identiche.
La distanza tra i lati attivi di matassa prende il nome di passo polare τ dell’avvolgimento:
τ = αR =
Dove p è il numero di coppie polari e α =
π
p
πR
p
è il passo polare in forma angolare.
Cambiamo ancora la configurazione degli avvolgimenti. Lasciamo invariato il numero di cave, ma
invece di fare in modo che la corrente all’interno di ciascuna cava vari in maniera alternativa (cioè
entrante - uscente - entrante - uscente), facciamo in modo che nelle prime due cave la corrente risulti
essere entrante e nelle altre due cave risulti essere uscente.
36
Dobbiamo ripetere la stessa procedura fatta precedentemente, per determiniamo la f.m.m. Quindi
considerando la curva γ orientata con verso concorde a quello della corrente circolante nella prima cava.
La f.m.m risulta avere il seguente andamento:
Ora passiamo dalla f.m.m alla ∆F (dobbiamo traslare l’asse xs in modo tale che le aree positive siano
uguali a quelle negative):
37
Si può notare che la ∆F in questo caso presenta solo un polo Nord e un solo polo Sud, perciò il numero
di coppie polari è pari ad uno.
Rispetto al caso precedente abbiamo soltanto alterato il senso di percorrenza delle correnti e questo ha
determinando un’alterazione del numero di coppie polari e della forma della distribuzione della ∆F e
quindi del campo H e del campo B.
Vediamo come deve essere distribuito l’avvolgimento per ottenere la precedente evoluzione di campo H:
Come si può immediatamente notare a seconda di come si distribuisce l’avvolgimento si modifica il
numero di coppie polari e la forma della distribuzione senza però alterare il numero di coppie polari. Se
la distanza tra le coppie polari risulta essere strettamente connessa alla distanza tra i lati attivi di
matassa, per una coppia polare i lati attivi di ciascuna matassa dovranno distare τ =
π
p
=π .
La cosa che ci interessa con più rilevanza è fare in modo che la distribuzione di induzione al traferro si
avvicini il più possibile ad una forma sinusoidale, il motivo è di facile comprensione.
Se abbiamo un campo magnetico variabile nel tempo di tipo sinusoidale produrrà un flusso concatenato
con gli avvolgimenti che varierà nel tempo e nella spazio anch’esso con legge sinusoidale e di
conseguenza, per la legge di Faraday – Lenz, questo flusso induce delle tensioni di tipo sinusoidale.
Questo perchè se le grandezze sono sinusoidali, il loro andamento non viene alterato quando queste
vengono integrante o derivante.
Si può affermare che, se il numero di cave per polo e per fase viene aumentato, la distribuzione di ∆F
tende sempre di più ad assumere una forma di tipo sinusoidale.
38
Perciò ipotizziamo di considerare in questo caso un avvolgimento che deve produrre un campo
magnetico il più possibile sinusoidale. Non distribuiamo uniformemente le nostre cave e ipotizziamo di
scegliere un numero di cave per polo e per fase, generalmente indicato in elettrotecnica con q,
esattamente pari a tre.
Vediamo come è fatto l’avvolgimento :
Indichiamo con τc l’angolo tra due cave successive (è
una variabile del nostro problema). Si vede
immediatamente che la struttura è caratterizzata da un
unico polo, infatti abbiamo soltanto un alternanza di
segno della corrente circolante nell’avvolgimento,
cioè la corrente risulta essere entrante nelle prime tre
cave e uscente nelle rimanenti. Poiché è presente una
sola coppia polare, la distanza tra due lati attivi di
matassa (passo polare) è pari a:
τ=
πR
p
= πR
Ogni matassa produrrà un campo H del tipo:
La distribuzione del campo H complessivo è pari alla somma dei tre contributi di campo prodotti dalla
nostra distribuzione dei conduttori:
39
Si può capire che la forma risultante della intensità di campo H risulta essere molto più vicina ad una
sinusoide rispetto all’onda quadra vista in precedenza. In particolare se facciamo lo sviluppo in serie di
Fourier otteniamo che la prima componente armonica risulta avare un andamento simile a quello
riportato in figura :
Aumentando il numero di cave si ottiene:
Aumentiamo numero di cave e distribuiamo le cave
dei conduttori in maniera tale da avvicinarmi a una
forma sinusoidale. Con un numero di cave pari a 10
Abbiamo che per ciascuna matassa la f.m.m. è ad
onda quadra, la f.m.m. complessiva e quindi la ∆F
sarà la somma di queste. Sommandosi la ∆F è
sempre una funzione discontinua, ma ha una forma
molto più vicina a una sinusoide.
Aumentando il numero di cave si ottiene una forma che si approssima sempre più a una sinusoide
40
Se potessimo aumentare enormemente il numero di cave e regolare in ciascuna cava il numero di
conduttori otterremo una distribuzione di H sempre più vicina ad una sinusoide (tenderà ad essere una
serie di seghettature che a poco a poco si avvicinano alla componente armonica fondamentale). Da un
punto di vista tecnico le metodologie adottate per ottenere questo aspetto sono due:
la prima è di distribuire il numero degli avvolgimenti e di scegliere in maniera ottimale τc, in
quanto la sua scelta ci consente di cancellare una componente armonica di spazio;
utilizzare avvolgimenti a doppio strato oppure cercare di regolare il numero di conduttori che
vengono messi in cava; in tal caso si riesce ad aumentare il numero di componenti armoniche da
eliminare o da ridurre fortemente.
Agendo su queste tre variabili (distribuzione degli avvolgimenti, avvolgimenti a doppio strato e
regolazione dei conduttori in cava) si riesce a ridurre fortemente le armoniche di spazio, le quali
risultano essere tutte dispari. In particolare le armoniche di spazio sulle quali si agisce sono: la 7^ e la
11^. Per gli avvolgimenti trifasici normalmente la 3^ armonica si cancella da sola. Ora dovremmo fare
un passaggio successivo poiché, anche se aumentiamo il numero di cave per polo e per fase, otteniamo
delle distribuzioni di H(x) e quindi di B(x), che saranno delle funzioni discontinue e come sappiamo,
andiamo incontro a delle problematiche matematiche quando andiamo a derivale o a integrarle. Bisogna
adottare delle semplificazioni che ci consentano di passare da una struttura di distribuzione
dell’avvolgimento di forma discontinua ad una struttura “teorica” di distribuzione dell’avvolgimento di
tipo continuo, che ci permetta di associare distribuzioni continue di B e quindi ci consenta dì lavorare
con funzioni facilmente gestibili da un punto di vista matematico.
Abbiamo visto che se l’avvolgimento è caratterizzato da un numero di cave per polo e per fase
crescente, la distribuzione di H si avvicina ad una sinusoide, perciò ragionando al limite, facciamo
tendere il numero di cave all’infinito. Questo significa che realizziamo delle cave sottilissime, il cui
spessore diventa infinitesimo e di conseguenza non ha più senso esprimere il numero di conduttori e la
corrente che vi circola in termini finiti, perché ragioniamo al limite e il numero di conduttori non è
intero, ma è un numero razionale. Quindi invece di ragionare sul numero di conduttori e sulla corrente
effettivamente circolante, ci conviene parlare di densità lineare di corrente ϑ ( x) = n( x ) ⋅ i , cioè ipotizzare
che riducendo al limite le cave, la corrente che circola in ciascun lato attivo di matassa risulta essere una
linea di corrente uniformemente distribuita sulla superficie di statore e di rotore che si affaccia al
traferro. Essendo una densità lineare la possiamo far variare in intensità e con continuità lungo tutta la
superficie, quindi passare da un concetto di distribuzione di corrente e di f.m.m discontinua ad un
concetto continuo.
41
Dobbiamo individuare degli strumenti matematici che ci consentano di passare da una distribuzione di
induzione H discontinua a una teoricamente sinusoidale. Per fare questo, effettuiamo le nostre analisi
sulla aduta di tensione magnetomotrice ∆F prodotta da una macchina avente un solo avvolgimento
disposto sullo statore:
Questa funzione può essere sviluppata in serie di Fourier in soli termini dispari:
π
4 n ⋅i ∞ 1
∆F(x) = ⋅ s s ∑
sin (1 + 2h ) x
π
τ
2 0 1 + 2h
In funzione degli angoli si ha:
4 n ⋅i ∞ 1
∆F(α ) = ⋅ s s ∑
sin (1 + 2h ) pα
π
2 0 1 + 2h
Le componenti armoniche presentano un ampiezza che tende a diminuire secondo la quantità
quindi la prima armonica presenta un’ampiezza che è pari a
4
il valore massimo dell’onda quadra
π
n ⋅i
n ⋅i
s s ; la terza armonica è 1 4 del valore massimo dell’onda quadra s s e così via:
2
3π
2
42
1
,
1 + 2h
A noi interessa ottenere una forma del campo magnetico e della caduta di f.m.m. di tipo sinusoidale.
Potremmo quindi andare a valutare quale risulta la rispettiva forma della distribuzione degli
avvolgimenti che mi genera la prima armonica di spazio della ∆F1
π
4 n ⋅i
∆F1 (x) = ⋅ s s sin x
π
2
τ
La stessa relazione in forma angolare sarà pari a:
4 n ⋅i
∆F1 (α ) = ⋅ s s sin pα
π
2
Sappiamo che c’è una relazione che lega la f.m.m. la caduta di f.m.m. e la densità lineare di corrente
f .m.m. = ∫ n ( x ) ⋅ i = ∫ ϑ ( x ) = ∫ ∆F ( x )
γ
γ
γ
Applicando la legge di Ampère possiamo determinare la densità di corrente che mi produce la
distribuzione di caduta di f.m.m ∆F1. Prendiamo una generica curva γ, la orientiamo secondo il verso
positivo che abbiamo scelto e applichiamo la legge della circuitazione trascurando quelle che risultano
essere le cadute di tensione magnetica nel ferro. Poiché vogliamo studiare il problema in maniera
continua, dovremo analizzare fenomeni infinitesimi e quindi considerare uno spostamento della curva γ
pari ad dx, dalla sua posizione di riferimento di ascissa curvilinea x.
Definiamo H positivo il
campo che va dallo statore al
rotore
Nel primo tratto la circuitazione della ∆F lungo la curva γ è pari a ∆F(x) con verso opposto a quello
scelto come positivo quindi: –∆F(x).
43
Nel secondo tratto la ∆F sarà pari a : ∆F(x)+
d∆F ( x)
dx.
dx
Quindi la circuitazione della ∆F lungo la curva γ sarà:
∫ H o d l = - ∆F(x) + [ ∆F(x) +
γ
d∆F(x)
dx]
dx
∆F ( x) = H ( x) ⋅ δ
Questa è pari alla corrente concatenata con la curva γ, ma se la densità lineare di corrente è la corrente
che
circola
in ciascun elemento lineare
dello
statore,
la
corrente
è
pari:
f .m.m = n( x ) ⋅ i ⋅ dx = ϑ ( x ) ⋅ dx
[
]
d∆F(x)
dx] = ϑ ( x) ⋅ dx
dx
e semplificando otteniamo la relazione fondamentale che è la Legge di Ampère microscopica:
Eguagliando: - ∆F(x) + [ ∆F(x) +
d∆F(x)
= ϑ ( x)
dx
ponendo dx = R ⋅ dα e sostituendo alla ∆F(x) la ∆F(α ) , la legge di Ampère in termini angolari:
d∆F(α )
= ϑ (α )
Rdα
Se abbiamo la ∆F1, mediante questa operazione di derivazione, possiamo ricavare la densità lineare di
corrente ϑ ( x) o ϑ (α ) responsabile di questa caduta di forza elettromotrice. Questa legge l’abbiamo
determinata applicando in forma microscopica la legge della circuitazione:
∫ H o d x = f .m.m Legge di Ampère macroscopica
γ
1
Conoscendo la ∆F e derivandola ricaviamo immediatamente la θ (x):
π
∂∆F 1 ( x) ∂ 4 n s ⋅ i s
1
ϑ ( x) =
=
sin
τ
∂x
∂x π 2
ϑ1 ( x ) =
4 ns ⋅ is π
π
π
x =
cos x = ϑˆ ⋅ cos x
π 2 τ
τ
τ
4 ns ⋅ is π
π
cos x
π 2 τ
τ
Svolgiamo il calcolo in forma angolare:
ϑ1 (α ) =
44
∂ 1
∂
∆F (α ) =
R ⋅ ∂α
R ⋅ ∂α
4 ns ⋅ is
1 4 ns ⋅ is
sin ( p ⋅ α ) =
p ⋅ cos( p ⋅ α )
π 2
R π 2
ϑ1 (α ) =
1 4 ns ⋅ is
p ⋅ cos( p ⋅ α )
Rπ 2
Osserviamo che il valore massimo della densità lineare di corrente deve risultare identico sia in funzione
dell’ascissa curvilinea x sia rispetto al sistema angolare α, infatti:
ϑ 1 (α ) =
2 ⋅ ns
2 ⋅ ns
x
π
⋅ i s ⋅ p ⋅ cos( p ⋅ α ) ⇒ ϑ 1 ( x s ) =
⋅ i s ⋅ cos p s = ϑˆ ⋅ cos x s
πR
πR
τ
R
p
1
Tracciamo la densità lineare di corrente θ (x) e la caduta di f.m.m ∆F1:
L’andamento della ϑ1 ( x) , la quale è uniformemente distribuita su tutto il passo polare, ci consente di
individuare il verso di percorrenza della corrente circolante sulla superficie di statore:
per valori positivi di ϑ1 ( x) la corrente è entrante;
per valori negativi di ϑ1 ( x) la corrente è uscente.
Questa è la corrente relativa ad un avvolgimento fittizio a passo intero, quindi i lati attivi delle matasse
che dovrebbero produrre la ϑ1 ( x) , dovranno distare tra loro πR. Infatti in corrispondenza di una
distanza pari a πR, i valori delle correnti saranno uguali così come sono uguali le densità lineare di
corrente ϑ1 ( x) (lo possiamo verificare andando a vedere sulla curva i valori in corrispondenza di 0 e di
ns is
). È come se avessimo un’infinità di matasse distribuite lungo tutto il
2
nostro avvolgimento, nella quale il numero di spire fittizio tende a variare secondo una legge che risulta
essere il modulo del coseno.
πR: sono uguali in modulo a
45
Tenendo conto che
ϑ ( xs ) = N s ( xs ) ⋅ is
oppure
ϑ (α ) = N s (α ) ⋅ is ,
ricaviamo che ciò che
varia non è la corrente, ma il numero di spire presenti nella nostra distribuzione di densità lineare di
corrente. Conoscendo la densità lineare di corrente riesco ad ottenere la distribuzione dei conduttori che
produce un campo e una caduta di f.m.m. sinusoidale:
2n p
π
N s ( x) = s cos x
πR
τ
Considerando gli angoli
2n p
N s ( β ) = s cos pβ
Rπ
Il termine n s p = N tot è il numero totale di spire presenti nella macchina, quindi è il valore massimo della
2
nostra funzione N s , infatti il
è il legame che esiste tra il numero medio e il numero massimo di spire:
π
π
π
p Nˆ s
2
2p
ˆ
[
Ns =
N s cos pβ dβ =
sin pβ ] π = Nˆ s
∫
−
π π
π p
π
2p
−
p 2p
Il numero medio di spire è una quantità che non cambia considerando il numero di spire in funzione
della ascisse curvilinee, infatti:
2p
1
τ
1
2
1
π
τ
N s = ∫ Nˆ s cos xdx = Nˆ s
τ τ
τ
τ
π
−
2
Sostituendo si ottiene
ϑ 1 ( x) = N s ( x)i s ;
con N s ( x) =
2 Nˆ s
π
cos x
πR
τ
considerando gli angoli
ϑ 1 ( β ) = N s ( β )i s ;
46
con N s ( β ) =
2 Nˆ s
cos pβ
πR
π
sin τ
τ
2
2
x = Nˆ s
−τ π
2
Allo stesso modo avremo una densità lineare di corrente e una distribuzione di spire equivalente sul
rotore:
2n
2 Nˆ r
π
π
cos x r
ϑr1 ( x r ) = N r ( x r )ir ; con N r ( x r ) = r cos x r =
τ
τ
πR
τ
considerando gli angoli
2n
2 Nˆ r
ϑr1 ( β ) = N r ( β )ir ; con N r ( β ) = r cos pβ =
cos pβ
τ
πR
N s e N r non sono numeri puri adimensionali ma bensì hanno la dimensione pari all’inverso di una
lunghezza.
Il numero di spire fittizio è un numero non vero, perché il numero di spire varia a passo intero.
Per avere una distribuzione lineare di corrente come riportato in figura è necessario che le spire varino
π
2n
con continuità secondo la funzione N ( x ) =
cos x .
τ
τ
In altre parole se avessimo la possibilità di realizzare infinite cave e potessimo teoricamente realizzare
un numero di conduttori razionale, la distribuzione dei conduttori affinché si possa produrre una
distribuzione di campo sinusoidale dovrebbe essere proprio N(x) (curva in arancione).
Calcolo della coppia per una macchina a distribuzione di campo sinusoidale
Ipotizziamo di alimentare una macchina costituita da un avvolgimento distribuito al rotore e allo statore,
sappiamo che ciò genererà due campi
magnetici, al rotore e allo statore, di forma
sinusoidali. I due campi saranno uguali ma
con polarità opposte, quindi nella macchina
sarà presente una coppia che cercherà di
allineare le due distribuzioni, riportando la
macchina in una condizione di equilibrio.
Questa coppia, come visto da uno studio
precedente, sarà:
T = is ⋅ ir
∂Lrs
∂ξ
Abbiamo un avvolgimento statorico e uno rotorico costituito da una sola matassa. Concentrandoci solo
sulla distribuzione relativa alla prima armonica di spazio andremo a determinare:
1
Il flusso concatenato con l’avvolgimento rotorico della prima armonica di spazio λ cr.
Il coefficiente di mutuo accoppiamento tra rotore e statore L1cr relativo alla prima armonica di
spazio.
La coppia T generata dalla macchina.
1
Per calcolare il flusso concatenato col rotore λ cr moltiplichiamo il numero di avvolgimenti rotorici per
il flusso concatenato con una singola spira. Quindi la forma della distribuzione degli avvolgimenti ci
servirà per ricavare quali sono i flussi concatenati, in quanto non abbiamo più a che fare con un
47
avvolgimento concentrato, ma abbiamo a che fare con un avvolgimento che risulta essere
uniformemente distribuito su tutta la superficie di statore e di rotore.
λ1 cr = N r ∫ B o d s = N r ∫ B oli ⋅d x
Σ
Σ
Il problema che ci poniamo è: quale Nr e quale superficie Σ dobbiamo considerare?
Per rispondere a questo quesito, ragioniamo sul grafico che riporta la distribuzione sinusoidale di campo
dello statore relativamente alla prima armonica B' ( x s ) :
Il sistema rotorico è sfasato rispetto a quello statorico di una quantità ζ R. Per quanto riguarda
l’avvolgimento di rotore avrò la funzione (in blu) che rappresenta il numero equivalente di spire al
rotore in funzione della variabile xr ( N r ( xr )) . Per fare il calcolo del flusso concatenato con
l’avvolgimento rotorico, dovrò considerare il flusso che si concatena con ciascuna spira relativa ad una
matassa dell’avvolgimento, tener conto che la matassa presenterà un numero di spire dato dal valore
N r ( xr ) , ricavato il flusso che si concatena con una singola matassa dovrò effettuare lo stesso calcolo per
ciascuna posizione xr del mio avvolgimento. Poiché abbiamo un avvolgimento distribuito in modo
continuo su tutta la superficie di rotore che si affaccia al traferro, per sommare i flussi concatenati di
ciascuna matassa è necessario effettuare un operazione di integrazione. In particolare il calcolo sarà un
doppio integrale; devo prima calcolare il flusso relativamente ad una spira di matassa ( li
ψ +τ
∫ B⋅dx ) e
ψ
poi sommare i flussi relativamente a tutte le matasse (tramite il secondo integrale).
Andiamo a fare il calcolo del flusso, indicando con ψ la generica posizione su xr di un lato attivo di
πR
matassa (ricordiamo che la macchina che stiamo analizzando presenta un passo polare τ =
= πR , di
p
conseguenza l’altro lato attivo di matassa è posizionato in Xr = ψ + τ = ψ + πR ):
τ
ψ +τ
2
1
λ cr = p ∫ N (ψ ) ⋅ l ⋅ ∫ B x ⋅ dx dψ
r
i
s
r
r
ψ
τ
−
2
( )
48
Se valutiamo λ1cr in funzione della posizione angolare β e non in funzione della ascissa curvilinea x,
l’integrale precedente assume la seguente forma:
ε +π
2p
p
λ1cr = p ∫ N (ε ) ⋅l R ⋅ ∫ B ( β ) ⋅ dβ R ⋅ dε
r
i ε s
π
−
2p
π
Il termine tra parentesi quadre è pari al flusso che si concatena con una spira di una generica matassa di
rotore, mentre il secondo integrale somma tutti i flussi concatenati con tutte le spire di matassa presenti
al rotore relativi ad una coppia polare.
A differenza del caso lineare, per sommare tutti i flussi non dovremo far variare il nostro integrale lungo
una linea dx, ma bensì lungo un arco di circonferenza Rdε:
1
Una volta determinato il flusso λ
di prima armonica è pari a:
cr
il valore del coefficiente di mutuo accoppiamento tra rotore e statore
λ1cr
L1rs =
i =0
r
i
s
Svolgiamo il primo integrale
ε+
∫
ε
π
p
ε+
l RBˆ1 sin p( β + ξ )dβ = l RBˆ1
i s
i s
∫
ε
π
p
π
ε+
lR
p
sin p( β + ξ )dβ = i Bˆ1[ − cos p( β + ξ )]
=
ε
p s
l R
2l R
π
= i Bˆ 1s − cos p (ε + + ξ ) + cos p (ε + ξ ) = i Bˆ 1s cos p (ε + ξ )
p
p
p
[
]
Sostituendo il risultato dentro l'espressione di λr si ha:
π
π
2 p 2 Nˆ
2l R
2 Nˆ l R 1 2 p
r cos pε i Bˆ1 cos p (ε + ξ ) R dε = p
r i Bˆ
λ =p ∫
∫ 2 cos pε cos p( ε + ξ )dε =
cr
s
π p s π
p
π Rπ
−
−
2p
2p
π
π
2
p
2
p
= 2 Nˆ r l RBˆ 1 π cos pξ
r l RBˆ 1
cos
p
(
2
+
)
d
+
cos
p
d
ε
ξ
ε
ξ
ε
∫
π i s ∫π
π i sp
π
−
−
2 p
2p
2 Nˆ
=
49
4 n s is
otteniamo:
Sostituendo il valore del campo Bˆ s =
π 2δ
2 Nˆ
λ
cr
=
πRl
4n i
Nˆ
i µ i cos pξ
r l R s s µ π cos pξ = 8
r n
i
0
s
2
π 2δ
pπ
2δ 0 s
π p
Sostituendo alla relazione la permanenza al traferro Γ =
t
λ
cr
=
8
n n Γ i cos p ξ
r s t s
π2
dato che
πRli
2δ
µ0 e
n p = Nˆ
r
r
n n Γ = Lˆ allora
s r t
rs
λ
cr
si ha:
=
8 ˆ
L i cos pξ
rs s
2
π
Il coefficiente di mutuo accoppiamento sarà:
1
L rs =
λcr i =0
r
is
=
8 ˆ
Lrs cos pξ = Lˆ1rs cos pξ
2
π
Il coefficiente di mutuo accoppiamento non è più una funzione lineare, ed è funzione dell'angolo ξ. Da
questa espressione si vede che si ha un accoppiamento massimo quando le due matasse sono
perfettamente allineate, avremo invece un accoppiamento nullo quando le due matasse si trovano in
quadratura. Per ξ =π/2 non si concatena nessun flusso con la matassa del rotore quindi il coefficiente di
mutuo accoppiamento è uguale 0. Con ξ=0 tutto il flusso prodotto dall'avvolgimento di statore si
concatena con l'avvolgimento di rotore, quindi il coefficiente di mutuo accoppiamento è massimo.
Possiamo ora determinare la coppia elettromagnetica
dL1rs
Te = is ir
= −is ir Lˆ1rs p sin pξ
dξ
Anche qui si vede che per ξ=0 (Le due matasse sono allineate) la coppia è nulla. Per un angolo ξ
diverso da 0 si creano delle forze che tendono a riportare il sistema nello stato di equilibrio. La coppia
sarà quindi massima quando le matasse sono in quadratura.
Anche in questo caso determiniamo la coppia partendo dalla forza calcolata tramite per legge di Lorentz,
questa analisi è quindi un metodo alternativo per il calcolo della coppia che ci permette di vedere se i
calcoli appena svolti sono esatti.
Linearizzando la macchina possiamo rappresentare
l’andamento delle grandezze che mi producono queste
forze.
Sappiamo che la forza è pari a:
50
F = i ⋅l ∧ B
Alimentando sia lo statore che il rotore otteniamo due campi magnetici, il campo al traferro sarà la
somma dei due campi. Per produrre coppia si deve avere interazione tra il campo al traferro e le correnti
distribuite sul rotore e sullo statore (ricordando che non si ottiene forza tra l'iterazione della corrente e il
campo prodotto dalla stessa corrente). Essendo in campo lineare, dividiamo il campo al traferro nei due
contributi, campo di rotore e di statore, quindi ci limitiamo a studiare l'iterazione tra campo di rotore e
corrente di statore oppure campo di statore e corrente di rotore. Per il principio di azione e reazione le
forze che nascono con l’interazione tra campo e correnti saranno uguali e contrarie, andiamo quindi a
studiare solo uno di questi sistemi. Ricordiamo inoltre che la forza ha verso contrario a quello scelto
come positivo, sarà quindi negativa.
Fe = − N r ir l ∧ Bs = − N r ir ( β )lBs ( β )
Considerando la forza applicata ad un elemento infinitesimo della nostra matassa avremo una forza:
dFe = −ϑr ( β ) dx l Bs1 ( β ) = −ϑr ( β ) Rdβ l Bs1 ( β )
Quindi la coppia sarà data da semplicemente moltiplicando la forza per il braccio:
dTe = −2 pR 2 lϑr ( β ) Bs1 ( β )dβ
La coppia totale (integrazione lungo la zona in cui la corrente è positiva) sarà pari a:
π
2p
Te = −2 pR 2 l ∫ ϑr ( β )Bs1 ( β ) dβ
−
Bs1 = Bˆ s1 sin p ( β + ξ ) =
Dato che
ϑr (β ) = ir
π
2p
4 is ns
µ 0 sin p( β + ξ )
π 2δ
2 ˆ
N r cos pβ
πR
π
2p
Allora sostituendo Te = −2 pR 2 l
−
∫π i
r
2 ˆ
4 is ns
N r cos pβ
µ 0 sin p( β + ξ ) dβ
Rπ
π 2δ
2p
π
Te = −2 pRli r
2 ˆ 4 is ns
Nr
µ0
π
π 2δ
2p
−
∫π cos pβ sin p( β + ξ )dβ
2p
Tramite Werner dividiamo la coppia in due integrali
π
2πp
2p
2 ˆ 4 is ns
Te = − pRli r N r
µ 0 ∫ sin p(2β + ξ )dβ + ∫ sin pξ dβ
π
π 2δ
π
− π
−
2p
2p
51
2 ˆ 4 is ns
π
Te = − pRli
N
µ
sin pξ
r π r π 2δ 0 p
πRli
µ0 allora Te = − 82 pir i s n s n r Γt sin pξ
2δ
π
8
allora Te = − 2 pir i s Lˆ rs sin pξ
π
Sapendo che Nˆ r = n r p e che Γt =
Dato che n s n r Γ = Lˆ rs
Te = − p
8
π
i i Lˆ rs sin pξ = − pir is Lˆ1rs sin pξ
2 r s
Troviamo come al solito lo stesso risultato di prima. Ciò che si vede è che le due distribuzioni di
induzione tendono ad allinearsi. Se le correnti di statore è di rotore sono costanti (le distribuzione di
induzione sono stazionarie) si vede che la coppia elettromagnetica che si sviluppa è costante, quindi in
generale se abbiamo due distribuzioni che risultano essere tra di loro stazionarie e sfasate di un certo
angolo, tra di loro si produce una coppia costante che è massima quando le due distribuzioni di
induzione risultano essere in quadratura.
Calcolo della coppia per una macchina alimentata al rotore e allo statore con correnti
sinusoidali
Questo è vero per una macchina alimentata con correnti generiche, ora andiamo ad avvicinarci di più
alla realtà calcolando la coppia elettromagnetica con correnti di rotore e statore sinusoidali.
is = 2 I s cos ω s t
ir =
2 I r cos ω r t
Ipotizziamo che il rotore ruoti con velocità ωm allora
da una sola coppia polare p=1.
ξ = ωmt + ξ 0
e che la macchina sia costituita
1
Andando a sostituire i nuovi parametri nella coppia trovata precedentemente Te = −ir is Lˆ rs sinξ si
ricava la nuova espressione della coppia elettromagnetica.
Te = −2 I r cosω r t I s cosω s tLˆ1rs sin (ω m t + ξ 0 )
Sconponendo tramite Werner si ottiene
Te = − I r I s L1rs [cos(ω r + ω s )t + cos(ω r − ω s )t ]sin(ω m t + ξ 0 )
Sviluppando ancora con Werner
1
Te = − I r I s L1rs {sin[(ωm + ωr + ωs )t + ξ 0 ] + sin[(ωm − ωr − ωs )t + ξ 0 ] + sin[(ωm + ωr − ωs )t + ξ 0 ] + sin[(ωm − ωr + ωs )t + ξ 0 ]}
2
Per avere coppia e quindi conversione di energia, almeno uno dei quattro addendi dev’essere
indipendente dal tempo, questo vuol dire avere ± ω r ± ω s ± ω m = 0
Studiando tutte le
combinazioni si ottengono tutte le macchine elettriche monofasi. Si nota che per un termine di coppia
costante gli altri tre sono pulsanti, quindi la macchina elettrica monofase non converte l’energia in
maniera efficiente, infatti una parte dell'energia mi produce coppia costante il resto mi produce
52
vibrazioni e quindi rumore, questo spiega perché le macchine elettriche monofasi vengono utilizzate
solo per piccole potenze.
Quindi alimentando gli avvolgimenti con correnti sinusoidali si producono coppie pulsanti oltre alla
coppia costante, questo vuol dire che le distribuzioni prodotte dai due avvolgimenti non sono
stazionarie.
Studio delle macchine elettriche monofasi
Siamo riusciti a trovare la coppia per una macchina elettrica monofase alimentata al rotore e allo statore
con correnti sinusoidali, questa si è visto esser pari a
1
Te = − I r I s L1rs {sin[(ωm + ωr + ωs )t + ξ 0 ] + sin[(ωm − ωr − ωs )t + ξ 0 ] + sin[(ωm + ωr − ωs )t + ξ0 ] + sin[(ωm − ωr + ωs )t + ξ0 ]}
2
Abbiamo anche visto che la condizione da rispettare perché si abbia un contributo di coppia costante è:
± ω r ± ω s ± ω m = 0 Da questa relazione possiamo ottenere tutte le macchine elettriche monofasi.
Andiamo allora a studiare le varie combinazioni.
Prima condizione
Velocità meccanica pari a 0 ωm =0 Questa è sicuramente una condizione particolare infatti il rotore è
bloccato. In questo caso abbiamo che ± ω r ± ω s = 0 questa è verificata in vari casi.
Il caso più semplice è, ωs =0 ; ωr =0
in questo caso si produce sicuramente una coppia costante nel tempo.
Te = −2I r I s L1rs sin(ξ0 )
Un altro caso sarà per ω r = ω s in questo caso avremo un valore di coppia pari a
Te = −I r I s L1rs sin(ξ0 )
Quindi se noi alimentiamo una macchina elettrica monofase con correnti allo statore e al rotore
sinusoidali e con ωm =0, per avere una coppia mediamente diverso da 0 è necessario che le due
pulsazioni siano uguali. In questa situazione non si ha però la conversione di energia elettrica in energia
meccanica, infatti Pme = Tme ω m quindi abbiamo coppia elettromagnetica sull'asse, ma non abbiamo
conversione di energia elettrica in meccanica.
Vista in questo modo sembra che queste relazioni non portino a nulla, invece ci dicono che questa
macchina è auto avviante, non ha bisogno che si porti il rotore alla velocità di sincronismo.
Analizziamo il caso in cui abbiamo conversione di energia.
Vista la relazione Pme = Tme ω m per avere conversione di energia si deve avere
possiamo avere varie soluzioni.
Imponiamo la prima condizione:
ωm ≠ 0
anche qui
ω s = 0 ⇒ I s = cos t
± ωr ± ωm = 0
Allora
quindi ω r = ω m
nell'avvolgimento rotorico la pulsazione delle
grandezze elettriche deve essere uguale alla velocità di rotazione meccanica. Questa condizione viene
usata nei motori a corrente continua dove un collettore ad anelli (dispositivo che commuta la corrente
nelle fasi) mi realizza la condizione ω r = ω m
53
In questo modo la coppia risultante diventa
Te = −I r I s L1rs [sin(2ωr t + ξ0 ) + sinξ0 ]
Vediamo l'altra condizione, sempre con ω m ≠ 0 poniamo
rotore è costante, quindi
ωs = ωm
ω r = 0 la corrente con cui alimentiamo il
abbiamo ottenuto una macchina elettrica sincrona monofase. La
1
coppia risultante sarà Te = −I r I s Lrs [sin(2ωs t + ξ0 ) + sinξ0 ]
Abbiano infine l'ultimo caso
Qui ωs
e ωr
ωs ± ωr = ωm
sono legate da una relazione, la loro somma
ω s + ω r = ω m o sottrazione
ω s − ω r = ω m deve essere uguale a ωm quindi le pulsazioni elettriche non sono in alcun modo legate
alla pulsazione meccanica, non abbiamo più la condizione di sincronismo, per questo motivo queste
macchine vengono chiamate macchine asincrone monofasi.
Queste macchine presentano quattro valori di coppia.
Per
ωs + ωr = ωm
1
Te = − I r I s L1rs {sin[2ωmt + ξ0 ] + sin(ξ0 ) + sin[2ωr t + ξ0 ] + sin[2ωs t + ξ0 ]}
2
Per
ωs − ωr = ωm
1
Te = − I r I s L1rs {sin[2ωmt + ξ 0 ] + sin(ξ 0 ) − sin[2ωr t − ξ 0 ] + sin[2ωs t + ξ 0 ]}
2
In questo tipo di macchina si vede che a rotore bloccato la macchina è capace di auto avviarsi.
In tutti questi casi abbiamo sempre quattro componenti di coppia dove solo una componente ci fornisce
coppia costante, quindi il processo di conversione energetica per queste macchine non è un processo di
conversione efficiente, solo una parte dell'energia elettrica fornita viene trasformata in energia
meccanica utile, il resto dell'energia viene convertita in vibrazioni e quindi rumore.
Dobbiamo quindi riuscire ad eliminare le coppie di tipo pulsante.
Si deve quindi studiare come si sviluppa la coppia nelle macchine elettriche monofasi e vedere cosa
produce questi quattro termini di coppia.
Alimentiamo solo lo statore con una corrente sinusoidale i s =
54
2 I s sin ω s t
Alimentando la matassa di statore, abbiamo una ∆F, considerando solamente la prima armonica di
spazio avremmo che la ∆F sarà
∆Fs1 (α ) =
4 ns is
senα
π 2
Per ricavare il campo prodotto a traferro basta moltiplicare
la ∆F per µ0 /δ
Bs1 (α ) =
µ0
∆Fs (α )
δ
Andando a sostituire il valore della corrente di statore nel campo vediamo che questo diventa funzione
sia dello spazio che del tempo.
Bs1 (α , t ) =
4 ns 2 I s
sin ω t sin α = Bˆ s1 sin ω t sin α
π
2
Vediamo qual è l'evoluzione nel tempo del nostro campo
Per t0 =0 il campo è nullo
nell'istante t1 = π/2ω Sostituendo dentro il campo otteniamo Bs = Bˆ s sin α
1
1
nell'istante t2 = π/ω Sostituendo dentro il campo otteniamo un campo nullo come in t0
nell'istante t3 = 3π/2ω Sostituendo dentro il campo otteniamo Bs = − Bˆ s sin α
La nostra la distribuzione ha quindi l'evoluzione di tipo pulsante, vediamo in più che ha dei punti fissi, la
distribuzione e quindi fissa e oscilla tra i massimi.
1
1
Tramite Werner
55
1
Bs1 (α , t ) = Bˆ s1 [cos(ωt − α ) − cos(ωt + α )]
2
Il nostro campo magnetico è stato diviso in due campi. Vediamo che tipo di funzione stiamo
analizzando. Analizziamola funzione in vari istanti di tempo
Bˆ s1
cos( ω t + α ) ) è pari a cosα
Per t0 =0 la funzione (
2
Bˆ s1
π
Per t1 = π/2ω la funzione è pari a
cos( + α )
2
2
Se si vanno a considerare gli istanti t2, t3, t4 si vede che la distribuzione di induzione si sposta sempre di
una quantità pari a π/2 in verso opposto a quello scelto come riferimento.
L’andamento del campo è rappresentato in figura.
Bˆ s1
cos( ω t + α ) ha una forma nello spazio che rimane
Questo vuol dire che la nostra distribuzione
2
invariata e che trasla nel tempo con velocità ω (distribuzione di induzione rotante con velocità di
rotazione pari a ω ).
Bˆ s1
cos( ω t − α ) ha sempre una
L'altra funzione
2
forma nello spazio che rimane invariata e che trasla
nel tempo con velocità ω, ma differisce dalla prima
funzione solamente per il senso di rotazione opposto,
vedremo quindi l’onda muoversi in senso opposto.
56
Possiamo affermare che una distribuzione di induzione di tipo pulsante può essere vista come la somma
di due distribuzioni di tipo sinusoidali rotanti in verso opposto l’una rispetto all’altra e ampiezza pari
alla metà della distribuzione di partenza, abbiamo quindi due campi controrotanti. Lo stesso discorso si
può fare per l'avvolgimento di rotore, abbiamo quindi la presenza di quattro campi rotanti.
Studiamo quindi quali sono gli effetti sulla nostra macchina di partenza.
Alimentiamo l'avvolgimento di statore e di rotare con le correnti
i s = 2 I s sin ω s t
i r = 2 I r sin ω r t
Queste correnti producono due coppie di campi controrotanti, i quattro campi magnetici ruotano a
velocità ωs ; - ωs ; ωr; -ωr
Scriviamo le espressioni dei quatto campi presenti nella macchina.
B s (α , t ) =
B s (α , t ) =
Br ( β , t ) =
Br ( β , t ) =
Bˆ s1
cos( ω s t − α ) ∗
2
Bˆ s1
cos( ω s t + α )
2
Bˆ r1
cos( ω r t − β ) ∗
2
Bˆ r1
cos( ω r t + β )
2
L’interazione tra questi quatto campi ci porta ad ottenere quattro termini di coppia, naturalmente i campi
magnetici prodotti dallo stesso sistema non interagiscono tra loro.
Focalizziamo l'attenzione sui campi di rotore e statore che hanno verso positivo di rotazione (*).
Per ricavare la coppia elettromagnetica ci basta applicare la relazione di base.
π
2
Te = −2 R 2 l i ∫ ϑr ( β , t )Bs ( β , t )dβ
−
π
2
57
Dobbiamo andare a sostituire nella nostra relaziona i valori di ϑr e di Bs
Noi abbiamo il valore del campo di rotore non di ϑr , sappiamo però che le due quantità sono legate tra
loro, infatti la densità di corrente al rotore mi genera il campo di rotore.
∂∆Fr ( β , t )
δ
Sapendo che ϑr =
e che ∆Fr ( β , t ) =
Br ( β , t ) si ottiene:
µ0
R∂β
ϑr =
∂∆Fr ( β , t ) δ Br1
=
sin(ω r t − β ) = ϑˆr sin(ω r t − β )
µ 0 R2
R∂β
Si nota che la ϑr ricavata è legata al campo di rotore che ha verso positivo di rotazione, questo ci fa
capire che c’è un’altra densità di corrente legata all’altro campo di rotore che non abbiamo considerato,
quello con verso di rotazione negativo.
Prendiamo ora il valore del campo di statore e lo riportiamo nelle coordinate di rotore.
α = β + ξ = β + ω m t + ξ 0 allora
Bˆ s1
Bs ( β , t ) =
cos(ω s t − β − ω m t − ξ 0 )
2
Andando poi a sostituire nell'espressione della coppia elettromagnetica otteniamo:
π
2
Te = −2 R 2 li ∫ ϑˆr sin(ω r t − β ) Bˆ s1 cos(ω s t − β − ω m t − ξ 0 )dβ
−
π
2
Questo termine di coppia è generato dal interazione di ϑr e Bs rotanti nel senso positivo, ma allora
avremo un altro termine che tiene conto del ϑr con verso positivo e Bs con verso negativo e altri due
termini di coppia riguardanti il legame tra il ϑr con verso negativo e i due termini di campo generati allo
statore.
π
π
π
π2
2
2
2
2
+
+
+
−
−
−
−
+
Te = −2 R li ∫ ϑr (ω r )Bs (ω s ) dβ + ∫ ϑr (ω r )Bs (ω s )dβ + ∫ ϑr (ω r )Bs (ω s )dβ + ∫ ϑr (ω r )Bs (ω s )dβ
π
π
π
− π2
−
−
−
2
2
2
Come si è dimostrato si ottengono quattro termini di coppia, noi per semplicità ne calcoleremo solo uno.
π
2
Te = −2 R liϑˆr Bˆ s1 ∫ sin(ω r t − β ) cos(ω s t − β − ω m t − ξ 0 )dβ
2
−
π
2
Tramite le formule di Werner scomponiamo la coppia in due integrali.
π
π2
2
2 ˆ ˆ1
Te = − R liϑr Bs ∫ sin(ω r t − β + ω s t − β − ω m t − ξ 0 )dβ + ∫ sin(ω r t − β − ω s t + β + ω m t + ξ 0 )dβ
π
− π2
−
2
π
π2
2
2 ˆ ˆ1
Te = − R liϑr Bs ∫ sin[(ω r + ω s − ω m )t − 2β − ξ 0 ]dβ + ∫ sin[(ω r − ω s + ω m )t + ξ 0 ]dβ
π
− π2
−
2
Quindi un termine di coppia elettromagnetica è pari a:
Te = − R 2liϑˆr Bˆ s1π sin[(ωr − ωs + ωm )t + ξ 0 ]
58
Questo termine di coppia è costante solo se ωr - ω s + ωm =0 ( ωr riportato allo statore e ωs sono
perfettamente uguali; ωr + ωm = ω s ) quindi se le due distribuzioni di induzione di statore e di rotore
rispetto allo stesso sistema di riferimento, sono perfettamente sincrone. Senza questa condizione la
coppia sarà costituita solo da termini variabili nel tempo.
La coppia è strettamente legata: all'angolo ξ0 , a ϑr e quindi a ir, a Bs e quindi a is. Si vede che per ξ0
=π/2 la coppia è massima, i campi sono quindi in quadratura.
Arriviamo alla conclusione che devo trovare una macchina della quale sia presente un solo campo
magnetico rotante, le macchine monofasi non mi permettono questo, infatti ottenendo un termine di
coppia costante abbiamo sempre la presenza di tre termini variabili nel tempo che mi portano a una
conversione non efficiente di energia. Passiamo quindi ad un altro tipo di macchina elettrica, quella di
tipo polifasica, dobbiamo infatti dimostrare che per avere coppia costante dobbiamo realizzare una
macchina in cui ci sono solo due campi magnetici sinusoidali (uno di rotare e uno di statore) che
ruotano, che hanno le stesse coppie polari sia sullo statore che sul rotore e che sono sincroni, solo così
produciamo una coppia costante.
Nelle macchine monofasi non lo potremmo mai fare questo perché abbiamo sempre quattro campi e al
massimo solo su due riusciamo ad avere le condizioni di sincronismo.
Studio della coppia in una macchina elettrica monofase avente coppie polari allo
statore differenti dalle coppie polari al rotore
Per ora abbiamo dimostrato per ottenere un valore di coppia costante nel tempo dobbiamo avere i campi
di rotore e statore al sincronismo, solo allora si avrà un trasferimento di potenza e quindi una
conversione utile di energia. La sola condizione di sincronismo non basta a finche si abbia una
conversione utile di energia, infatti la macchina deve presentare, al rotore e allo statore, uguali coppie
polari. Solo rispettando entrambe le condizioni, sincronismo dei campi e uguali coppie polari si riesce ad
avere una conversione utile di energia.
Andiamo quindi a dimostrare che una macchina con un diverso numero di coppie polari al rotore e allo
statore presenta una coppia media nulla e quindi non si ha una trasformazione utile di energia.
Partiamo dall’ipotesi di studiare una macchina monobasica alimentata con due correnti sinusoidali sia al
rotore che allo statore. La macchina presenta p s coppie polari allo statore e p r coppie polari al rotore
con p s ≠ p r
2π
La coppia elettromagnetica sarà pari a:
Te = − R 2 l i ∫ ϑr ( β , t )Bs ( β , t )dβ
0
Dato che la macchina è monofase saranno presenti due campi controrotanti allo statore e due densità
lineari di corrente controrotanti al rotore, l’interazione di queste grandezze mi porterà ad avere quattro
termini di coppia
2π
2π
2π
2π
Te = − R 2 li ∫ ϑr (ω r+ )Bs (ω s+ )dβ + ∫ ϑr (ω r+ )Bs (ω s− )dβ + ∫ ϑr (ω r− )Bs (ω s− )dβ + ∫ ϑr (ω r− )Bs (ω s+ )dβ
0
0
0
0
Sappiamo gia che nel caso più generale solo uno di questi termini potrà essere messo al sincronismo, gli
altri tre termini di coppia avranno un valor medio nullo, quindi per semplicità andremo a studiare le sole
due funzioni (ϑr e Bs ) con senso di rotazione positivo.
Il campo di statore riportato al rotore sarà pari a:
Bˆ s1
Bs ( β , t ) =
cos(ω s t − p s β − p sω m t − p sξ 0 )
2
59
Mentre la densità lineare di rotore sarà:
ϑr =
∂∆Fr ( β , t ) δ Br1
sin(ω r t − pr β ) = ϑˆr sin(ω r t − pr β )
=
µ0 R2
R∂β
Sostituendo nell’espressione della coppia si ottiene:
2π
Te = − R liϑˆr Bˆ s1 ∫ sin(ω r t − pr β ) cos(ω s t − p s β − p sω m t − p sξ 0 )dβ
2
0
Dividendo l’espressione tramite Werner
2π
2π
Te = − K ∫ sin [(ω r + ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]dβ + ∫ sin [(ω r − ω s + p s ω m )t − ( p r − p s )β + p s ξ 0 ]dβ
0
0
Ora dobbiamo fare due ipotesi infatti p s e p r sono sempre dei numeri interi, ma possono essere dei
valori pari o dispari.
Se p s e p r sono entrambi dei numeri pari o entrambi dei numeri dispari, i termini ( pr + ps ) e
saranno sempre pari. Quindi le due funzioni avranno sempre una periodicità multipla
di due, allora i due integrali lungo tutto un periodo saranno nulli, otteniamo quindi un valore di
coppia nullo.
( pr − ps )
Se p s e p r sono, uno pari e l’altro dispari o viceversa, in questo caso i termini ( pr + ps ) e
( p r − p s ) saranno entrambi sempre dispari. Risolvendo il primo integrale
2π
∫ sin[(ω
2π
r
+ ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]dβ = [− cos[(ω r + ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]]0
0
= − cos[(ω r + ω s − p s ω m )t − ( p r + p s )2π − p s ξ 0 ] + cos[(ω r + ω s − p s ω m )t − p s ξ 0 ]
il termine ( p r + p s )2π sarà sempre un multiplo di 2π (3 ⋅ 2π ; 5 ⋅ 2π ; 7 ⋅ 2π ) quindi
= − cos[(ω r + ω s − p s ω m )t − p s ξ 0 ] + cos[(ω r + ω s − p s ω m )t − p s ξ 0 ] = 0 Questo termine di coppia
è nullo, infatti in questo caso le aree positive uguagliano quelle negative. Il secondo integrale
sarà sempre nullo, infatti il termine ( p r − p s )2π sarà sempre un multiplo di 2π quindi identico
al caso analizzato precedentemente.
Abbiamo dimostrato che solo con un numero uguale di coppie polari la rotore e allo statore si riesce ad
avere una conversione energetica all’interno della macchina, infatti avendo un uguale numero di coppie
polari riusciamo a svincolarci dalle variabili spaziali ottenendo quindi, una volta messi in sincronismo i
campi, un valore di coppia costante nel tempo e quindi una conversione utile di energia tra il sistema
elettrico e quello meccanico.
60
Macchine elettriche polifasiche
Studio del campo magnetico nelle macchine elettriche polifasiche
Ciò che vogliamo ottenere è una macchia elettrica in cui non compaiono i termini di coppia pulsanti, si
deve arrivare ad avere due distribuzioni, una di campo e una delle correnti, che siano sinusoidali e
sincrone tra loro, in questo modo riusciamo ad ottenere un solo termine costante di coppia. La prima
cosa da fare è quindi capire quante fasi servono per produrre un campo magnetico rotante e che
espressione ha il campo in una macchina polifasica.
Due fasi
mf =2; (n. fasi)
p =1; (coppie polari)
q=1; (numero di cave per polo per fase)
Ciascuna fase è costituita da una matassa.
Dobbiamo sempre rispettare le caratteristiche di simmetria della macchina, dobbiamo quindi distribuire
in maniera simmetrica le nostre cave e le fasi lungo la superficie di statore.
Il numero di cave totale è dato dalla relazione Q = m f q 2 p = 4
Le cave devono essere distribuite sulla superficie di statore in maniera simmetrica, la distanza da
prendere è dato dal passo di cava τ c =
2πR πR
=
= α c R Le cave andranno distanziate tra loro di αc
Q
2
= π/2
Una volta definito il numero il numero di cave e la loro posizione si deve definire come vanno messe le
fasi nella macchina. Anche in questo caso dobbiamo distribuire in maniera uniforme le fasi, la posizione
dei principi delle fasi sarà pari a xi =
2πR
(1 − i) con i = 1,2,3...m f
mf p
2πR
(1 − 1) = 0
2
2πR
(1 − 2) = πR
La fase 2 avrà il principio in x2 =
2
La fase 1 avrà il principio in x1 =
Come si può vedere in figura la distanza tra i due principi è proprio π
61
Anche l’alimentazione deve rispettare i parametri di simmetria quindi la macchina sarà alimentata da
due correnti con modulo identico ma opposti in fase, come si vede nella figura, dove abbiamo
rappresentato i due vettori simbolici di corrente.
Si vede che nei due lati attivi di matassa i versi di percorrenza delle correnti sono discordi.
Sapendo che le correnti sono opposte in fase e come se in ogni cava le correnti siano concordi, quindi
abbiamo nuovamente un sistema monofase con i suoi problemi di coppia. Questa analisi ci fa capire che
non è possibile creare una macchina bifasica.
Quattro fasi
mf =4;
p =1;
q=1;
Ciascuna fase è costituita da una matassa.
Ricordando che si devono sempre rispettare le caratteristiche di simmetria della macchina, andiamo a
calcolare il numero di cave totale, dato dalla relazione Q = m f q 2 p = 8
Le cave devono essere distribuite sulla superficie di statore in maniera simmetrica, la distanza da
prendere è dato dal passo di cava
τc =
2πR πR
=
= α c R Le cave andranno distanziate tra loro di αc
Q
4
= π/4
Una volta definito il numero il numero di cave e la loro posizione si deve definire come vanno messe le
fasi nella macchina. Anche in questo caso dobbiamo distribuire in maniera uniforme le fasi, la posizione
dei principi delle fasi sarà pari a xi =
2πR
(i − 1) con i = 1,2,3...m f
mf p
2πR
(1 − 1) = 0
4
2πR
πR
(2 − 1) =
La fase 2 avrà il principio in x2 =
4
2
La fase 1 avrà il principio in x1 =
62
2πR
(3 − 1) = πR
4
2πR
3πR
(4 − 1) =
La fase 4 avrà il principio in x4 =
4
2
La fase 3 avrà il principio in x3 =
Lo sfasamento tra i principi di ciascuna fase è di π/2
La simmetria va rispettata anche per le correnti che quindi saranno sfasate tra di loro di π/2 come si vede
in figura.
Si vede che nella stessa cava sono presenti due fasi in cui le correnti sono uguali e opposte, i versi con
cui sono stati avvolti gli avvolgimenti sono uno positivo e uno negativo, quindi alla fine le correnti
circolanti nelle stesse cave sono identiche. Nella macchina è come se ci fossero due correnti in
quadratura.
Questo sistema può essere studiato come un sistema alimentato da due sole correnti in quadratura.
63
i1 = 2 I sin ω t
i2 = 2 I cos ω t
Andiamo a scrivere le espressioni delle cadute di f.m.m.
4 ns i s1
senα
π 2
4 ns is 2
∆F21 =
cos α
π 2
∆F11 =
Andiamo a sostituire il valore delle correnti dentro le cadute di f.m.m.
4 ns 2I
sin ω t sen α = ∆ Fˆ sin ω t sen α
π
2
4 ns 2 I
∆F21 =
cos ωt cos α = ∆Fˆ cos ωt cos α
π 2
∆ F11 =
Sviluppando tramite Werner
∆Fˆ
∆F11 = ∆Fˆ sin ω t senα =
[cos(ωt − α ) − cos(ωt + α )]
2
∆Fˆ
∆F21 = ∆Fˆ cos ω t cos α =
[cos(ω t + α ) + cos(ωt − α )]
2
La caduta di f.m.m. totale sarà pari alla somma delle due ∆F entrambe moltiplicate per due perché
prodotte da quattro correnti e non da due come il calcolo semplificato eseguito prima, quindi:
∆Ftot = 2 ∆F11 + 2 ∆F21 = 2 ∆Fˆ cos(ω t − α )
Il campo magnetico rotante prodotto è concorde con il verso scelto (diretto), cambiando segno a una
corrente otteniamo un campo magnetico che ruota in senso opposto (inverso).
Con una qualsiasi macchina elettrica a numero di fasi pari vediamo che si hanno sempre delle cave che
non vengono utilizzate, non si ha quindi l’uniforme utilizzazione della superficie di statore messa a
disposizione.
Tre fasi
Nelle macchine con numero di fasi dispari vengono sempre utilizzate tutte le cave, questo porta a una
efficiente utilizzazione della superficie a disposizione.
mf =3;
p =1;
q =1;
Ciascuna fase è costituita da una matassa.
Rispettando le caratteristiche di simmetria della macchina, andiamo a calcolare il numero di cave totale
Q = mf q 2 p = 6
Distribuiamo le cave sulla superficie di statore in maniera simmetrica, la distanza da prendere è:
τc =
64
2πR πR
=
= α c R Le cave andranno distanziate tra loro di αc = π/3
Q
3
Una volta definito il numero il numero di cave e la loro posizione si deve definire come vanno messe le
fasi nella macchina. Anche in questo caso dobbiamo distribuire in maniera uniforme le fasi, la posizione
dei principi delle fasi sarà pari a xi =
2πR
(i − 1) con i = 1,2,3...m f
mf p
2πR
(1 − 1) = 0
3
2πR
2πR
(2 − 1) =
La fase 2 avrà il principio in x2 =
3
3
2πR
4πR
(3 − 1) =
La fase 3 avrà il principio in x3 =
3
3
La fase 1 avrà il principio in x1 =
Andiamo quindi a disporre le fasi
Come si può notare tutte le cave sono occupate, in ogni cava abbiamo una fase.
Andando a considerare il piano che contiene le cave si ha:
65
Si vede che abbiamo due morsetti per ogni fase, a noi serve avere tre morsetti d'ingresso, realizziamo
quindi o una connessione a stella o a triangolo. Il collegamento a stella si ottiene collegando tra loro tutte
e tre le fini (questo lo si fa nella morsettiera).
Andiamo a vedere qual’è il campo a traferro prodotto da questi avvolgimenti, alimentiamo questi con un
sistema equilibrato di correnti.
is1 = 2 I s sinω s t
2π
is 2 = 2 I s sin ω s t −
3
4π
is 3 = 2 I s sin ω s t −
3
Calcoliamo il campo al traferro, essendo in un sistema lineare il campo al traferro sarà la somma dei tre
campi prodotti da ciascuna matassa. Sappiamo che il campo prodotto da una matassa sarà a onda quadra,
noi come al solito ragioniamo sulla prima armonica di spazio.
Bs1 (α ) = Bˆ s1 sinα =
µ 0 4 n s is
sinα
δ π 2
Andiamo a sostituire il valore della corrente relativa alla fase 1
Bs11 (α , t ) =
µ 0 4 ns 2 I s
sin ω s t sinα = Bˆ s1 sin ω s t sinα
δ π
2
Lo stesso discorso è valido per la seconda fase
Bs12 (α , t ) =
µ 0 4 ns 2 I s
2π
2π ˆ 1
2π
2π
sin ω s t −
sin α −
= Bs sin ω s t −
sin α −
δ π
2
3
3
3
3
Anche per il campo della terza fase si avrà uno sfasamento sia nello spazio che nel tempo
B s13 (α , t ) =
µ 0 4 ns 2 I s
4π
4π ˆ 1
4π
4π
sin ω s t −
sin α −
= Bs sin ω s t −
sin α −
2
3
3
3
3
δ π
Tramite Werner
Bˆ s1
B (α , t ) =
[cos(ω s t − α ) − cos(ω s t + α )]
2
Bˆ s1
4π
1
Bs 2 (α , t ) =
cos(ω s t − α ) − cos ω s t + α −
2
3
Bˆ s1
2π
1
Bs 3 (α , t ) =
cos(ω s t − α ) − cos ω s t + α −
2
3
1
s1
Per ricavare il campo totale sommiamo le tre distribuzioni
Btot (α , t ) =
66
3 ˆ1
B s cos(ω s t − α )
2
Possiamo affermare che ad una terna simmetrica diretta che alimenta un avvolgimento trifasico
corrisponde il campo magnetico rotante che ruota in senso diretto.
Per un confronto con le altre distribuzioni ricaviamo la ∆F che è legata al campo tramite una costante.
∆Ftot (α , t ) =
3 δ ˆ1
3
Bs cos(ω s t − α ) = ∆Fˆss1 cos(ω s t − α )
2 µ0
2
Si vede che l’unica differenza sta in una costante, quindi generalizzando a una macchina con una coppia
polare e mf fasi si ha: ∆Ftot (α , t ) =
mf
2
∆Fˆss1 cos(ω s t − α )
Troviamo ora qual è la velocità di rotazione del campo, per fare ciò dobbiamo trovare quel sistema di
riferimento per cui la nostra distribuzione di induzione risulta essere ferma, facendo quindi il
differenziale spazio temporale e imponendolo a 0 troviamo la velocità del nostro sistema di riferimento.
d (ϕ (α , t )) = 0
con ϕ = ω s t − α
dα
= ω sm
allora ω s dt − dα = 0 ⇒ ω s =
dt
Otteniamo che la velocità di rotazione del campo è uguale alla pulsazione elettrica con cui viene
alimentato il sistema.
Se applichiamo una terna inversa di correnti si ottiene Btot (α , t ) =
3 ˆ1
Bs cos(ω s t + α ) differenziando
2
ed eguagliando 0 si ottiene ω m = -ωs quindi applicando una terna inversa di correnti produciamo un
campo magnetico rotante in senso inverso a quello scelto come verso positivo.
Vediamo che succede se aumentiamo il numero di copie polari.
Tre fasi con p = 2
mf =3;
p =2;
q =1;
Ciascuna fase è costituita da una matassa.
Rispettando le caratteristiche di simmetria della macchina, andiamo a calcolare il numero di cave totale
Q = m f q 2 p = 12
Distribuiamo le cave sulla superficie di statore in maniera simmetrica, la distanza da prendere è:
τc =
2πR πR
=
= α c R Le cave andranno distanziate tra loro di αc = π/6
Q
6
Una volta definito il numero il numero di cave e la loro posizione si deve definire come vanno messe le
fasi nella macchina. Anche in questo caso dobbiamo distribuire in maniera uniforme le fasi, la posizione
dei principi delle fasi sarà pari a xi =
2πR
(i − 1) con i = 1,2,3...m f
mf p
2πR
(1 − 1) = 0
3⋅ 2
2πR
πR
(2 − 1) =
La fase 2 avrà il principio in x2 =
3⋅ 2
3
La fase 1 avrà il principio in x1 =
67
La fase 3 avrà il principio in x3 =
2πR
2πR
(3 − 1) =
3⋅ 2
3
Avendo aumentato il numero di poli il passo polare si è dimezzato τ =
π
πR
p
in termini angolari
π
questo vuol dire che ogni π/2 sarà presente un lato attivo della stessa matassa.
p 2
Vediamo quindi come sono disposte le matasse.
αr =
=
FASE 1
FASE 2
FASE 3
Aumentando il numero di poli le cave sono ancora tutte occupate da una sola matassa.
Vediamo come sono distribuite le matasse (per semplicità ne rappresentiamo solo una).
Le due matasse sono sfasate l'una rispetto all'altra in modo tale da distribuire le copie polari in maniera
uniforme e per produrre un unico avvolgimento colleghiamo le matasse di serie.
Ricaviamo l'espressione del campo, sempre riferendoci alla prima armonica.
Bs1 (α ) = Bˆ s1 sin pα = Bˆ s1 sin 2α
Alimentando quindi con un sistema simmetrico di correnti
68
is1 = 2 I s sinω s t
2π
is 2 = 2 I s sin ω s t −
3
4π
is 3 = 2 I s sin ω s t −
3
Si ottengono queste espressione del campo.
Bs11 (α , t ) = Bˆ s1 sin ω s t sin pα
2π
2π
Bs12 (α , t ) = Bˆ s1 sin ω s t −
sin pα −
3
3
4π
4π
Bs13 (α , t ) = Bˆ s1 sin ω s t −
sin pα −
3
3
Sviluppando con Werner e sommando, si ha un campo totale pari a:
Btot (α , t ) =
Andando
3 ˆ1
3
Bs cos(ω s t − pα ) = Bˆ s1 cos(ω s t − 2α )
2
2
a
∆Ftot (α , t ) =
generalizzare
a
una
macchina
con
p
coppie
polari
e
mf
fasi
si
ha:
mf δ ˆ1
mf ˆ1
Bs cos(ω s t − pα ) =
∆Fss cos(ω s t − pα )
2 µ0
2
La fase è cambiata, quindi facendo differenziale e uguagliandolo a 0 otteniamo
d (ϕ (α , t )) = 0
con ϕ = ω s t − pα
Quindi
ω s dt − pdα = 0 ⇒ ω s = p
ω
dα
= pω sm ⇒ s = ω sm
dt
p
Con pulsazione uguale al esempio precedente la velocità di rotazione del campo è diminuita.
Abbiamo dimostrato che una machina trifasica alimentata allo statore con una terna di correnti
simmetriche genera un campo elettrico rotante, questo vale anche per il rotore, infatti alimentando il
rotore con una terna simmetrica di correnti si produce comunque un campo magnetico rotante.
Creazione in campo magnetico rotante mettendo in rotazione un campo magnetico stazzionario
Alimentare un avvolgimento trifasico con una terna simmetrica di correnti non è l’unico modo per creare
uncampo magnetico rotante.
Possiamo alimentare il rotore in modo tale da ottenere un campo magnetico stazionario per il rotore,
questo vuol dire alimentare il rotore con una corrente continua. Mettendo in rotazione il rotore lo statore
vedrà un campo magnetico rotante.
Quindi alimentando il rotore con una corrente continua e ponendoci in un sistema di riferimento solidale
con il rotore abbiamo:
Br1 ( β ) = Bˆ r1 sin pβ
69
µ 4 nr I r
Questa campo magnetico è funzione solo della corrente di rotore Bˆ r1 = 0
, quindi aumentando la
δ π 2
corrente aumenta il valore massimo del campo.
Mettendo in rotazione il rotore a una velocità ωm vediamo che gli assi di riferimento, con la macchina a
regime, sono sfasate in di ξ0 (Angolo iniziale rispetto alle
condizioni di sincronismo).
Passiamo dal un sistema di riferimento rotorico a quello
statorico per capire come lo statore vede questo campo
magnetico.
Facciamo quindi il cambio di coordinate.
α=ξ+β Allora β=α−ξ
Con ξ=ωm+ξ0
Andando a sostituire β Dentro l'espressione del campo
otteniamo:
Br1 (α , t ) = Bˆ r1 sin p(α − ωmt − ξ 0 ) = Bˆ r1 sin( pα − pωmt − pξ 0 )
Abbiamo quindi prodotto un campo magnetico rotante alla velocità ωm e di forma sinusoidale.
Esprimendo il tutto tramite la caduta di f.m.m. si avrà:
∆Fr1 (α , t ) =
δ 1
Br (α , t ) = ∆Fˆr1 sin( pα − pω m t − pξ 0 )
µ0
Analisi delle principali grandezze elettriche nelle macchine elettriche polifasiche
L’esistenza di un campo magnetico rotante generato o dagli avvolgimenti di statore o di rotore porterà
alla nascita di un flusso e quindi la presenza di correnti e tensioni indotte sugli avvolgimenti della
macchina. Per capire meglio il comportamento delle grandezze elettriche presenti nelle macchina
ipotizziamo di alimentare prima lo statore e mantenere disalimentato il rotore poi di eseguire
l’operazione inversa, quindi alimentare il rotore e disalimentare lo statore.
Campo magnetico rotante prodotto allo statore
Le ipotesi di partenza sono:
1. Statore caratterizzato da degli avvolgimenti
trifasici uniformante distribuiti e alimentati da
da una terna simmetrica di correnti.
2. Corrente nulla negli avvolgimenti di rotore
Ir=0
Vogliamo conoscere l’andamento delle grandezze
elettriche in questo determinata condizione di
funzionamento.
Partiamo dal calcolo del flusso concatenato allo
statore.
70
Il calcolo viene eseguito sempre alo stesso modo, calcolando il flusso concatenato con una sola spira poi
andando a sommare tutti gli elementi di flusso concatenato con il nostro avvolgimento distribuito.
π
ε + πp
ε + πp
2p
2 ˆ
λs1 = p ∫ N s (ε ) ∫ Bs1 (α )liRdα Rdε = p ∫
N s cos( pε ) ∫ Bs1 (α )liRdα Rdε
π
π Rπ
ε
ε
−
−
2p
2
p
π
2p
Dal
legame
Bs1 (α , t ) =
che
esiste
tra
la
caduta
di
f.m.m.
e
il
campo
ricaviamo:
µ0
3 µ0 ˆ 1
∆Ftot (α , t ) =
∆Fss cos(ωs t − pα )
2δ
δ
Andando a sostituire otteniamo:
π
2p
λs1 = p
−
∫π
2p
ε + πp
3 µ0 ˆ 1
2 ˆ
N s cos( pε ) ∫
∆Fss cos(ω s t − pα )liRdα Rdε
Rπ
ε 2 δ
Portando fuori dall’integrale i termini costanti e sostituendo i rispettivi termini massimi
4 ns 2 I s
Nˆ s = n s p ; ∆Fˆss1 =
π
2
ε + πp
3 µ 0 4 ns 2 I s 2
λs1 = p
ns pliR ∫ cos( pε ) ∫ cos(ω s t − pα )dα dε
2 δ π
2 π
π
ε
−
2p
π
2p
Risolviamo il primo integrale
ε+
π
π
p
ε+
1
1
p
[
(
)
]
[sin (ω s t − pε − π ) − sin (ω s t − pε )] =
ω
α
α
ω
α
cos(
t
−
p
)
d
=
−
sin
t
−
p
=
−
s
s
ε
∫ε
p
p
=−
1
[− sin (ω s t − pε ) − sin (ω s t − pε )] = 2 sin(ω s t − pε )
p
p
Ora posiamo svolgere il secondo integrale
π
2p
2
∫π cos( pε ) p sin(ω t − pε )dε
s
−
Risolvendo tramite Werner otteniamo
2p
π
2πp
2p
π
1
sin (ω s t − pε + pε )dε + ∫ sin (ω s t − pε − pε )dε = 2 sin (ω s t )
∫
p π
π
p
−
−
2p
2p
il flusso concatenato è quindi pari a:
71
λs1 =
3 8 µ 0liRπ 2
3 8
3 8
3 1
2
2
2
sin
2
sin
2
sin
n
I
ω
t
=
Γ
n
I
ω
t
=
Γ
n
I
ω
t
=
Lss 2I s sin ωs t
s
s
s
t
s
s
s
t
s
s
s
2 π 2 2δ
2π2
2π2
2
Si arriva ad una espressione finale pari a :
λs1 = L1s 2I s sinωs t
3 1
Lss è il coefficiente di auto induzione delle matassa statorica.
2
Fisicamente L1s è coefficiente di mutuo accoppiamento, infatti si deve ricordare che il campo è prodotto
da tutte e tre le fasi, infatti il contributo di flusso prodotto dalla fase due e dalla fase tre che va a
3
concatenarsi con la fase uno vengono rappresentati dal . Questo termine in virtù della simmetria della
2
macchina e del sistema di alimentazione riesce a tener conto del flusso di mutua dovuto alle altre due
fasi.
Il calcolo svolto solo per la prima fase risultano essere identiche anche per le altre due.
Dove L1s =
λs1 = L1si1 (t )
λs 2 = L1si2 (t )
λs3 = L1si3 (t )
Con una terna di correnti pari a :
i1 = 2 I s sinω s t
2π
i2 = 2 I s sin ω s t −
3
4π
i3 = 2 I s sin ω s t −
3
Quindi con un campo magnetico rotante prodotto da una terna simmetrica di correnti circolanti allo
statore si ottiene un flusso concatenato con i tre avvolgimenti di statore, sfasati di 2π , il flusso
3
concatenato e la corrente sono legati dal solo coefficiente di auto induzione che è una quantità definita
dai soli parametri geometrici di macchina, abbiamo quindi un legame diretto tra flusso e corrente.
La conoscenza del flusso porta, tramite la legge di Faraday-Lenz, alla conoscenza della tensione indotta
e quindi alla coscienza del legame tra corrente e tensione indotta.
l’espressione della tensione indotta è:
dλs1
= − 2L1sω s I s cosω s t
dt
dλ
2π
es 2 = − s 2 = − 2L1sω s I s cos ω s t −
dt
3
es1 = −
es 3 = −
72
dλs 3
4π
= − 2L1s ωs I s cos ω s t −
dt
3
Da questa espressione si capisce che esiste sempre un legame diretto con la corrente, si nota inoltre che
la tensione indotta è in quadratura e in ritardo rispetto al flusso e alla corrente che invece risultano essere
in fase.
Partiamo sempre dall’ipotesi di non alimentare il rotore e di mantenere alimentato lo statore. Da queste
ipotesi di partenza vediamo che effetti produce al rotore il campo magnetico rotante di statore,
naturalmente per sviluppare il calcolo del flusso e della tensione indotta dobbiamo passare nel sistema di
riferimento rotorico, il resto sarà identico al calcolo visto precedentemente.
Sapendo che α = β + ξ il campo magnetico di statore riportato al rotore sarà:
Bs1 (β , t ) =
Il
µ0
3 µ0 ˆ 1
∆Ftot (β , t ) =
∆Fss cos(ωs t − pβ − pξ )
2δ
δ
flusso
concatenato
no
le
spire
di
rotore
sarà:
ε + p
ε + p
2p
µ
2
3
0
λr1 = p ∫ N r (ε ) ∫ Bs1 ( β )liRdβ Rdε = p ∫
∆Fˆss1 cos(ω s t − pβ − pξ )liRdβ Rdε
Nˆ r cos( pε ) ∫
π
π Rπ
ε
ε 2 δ
−
−
2p
2p
π
ε + πp
2p
µ
n
2
I
3 0 4 s
s 2
λr1 = p
nr pliR ∫ cos( pε ) ∫ cos(ω s t − pβ − pξ )dβ dε
2 δ π
2 π
π
ε
−
2p
π
π
π
π
2p
π
λr1 = p
λr1 = p
λr1 =
3 µ 0 4 ns 2 I s 2
nr pliR
2 δ π
2 π
2p
2
∫π cos( pε ) p sin (ω t − pε − pξ )dε
s
−
2p
π
3 µ 0 4 ns 2 I s 2
3 8
nr pliR 2 sin (ω s t − pξ ) =
ns nr Γt 2 I s sin (ω s t − pξ )
2 δ π
2 π
2π2
p
3 1
Lrs 2 I s sin (ω s t − pξ ) = L1m 2 I s sin (ω s t − pξ )
2
Il flusso, tramite un coefficiente di mutua induzione è ancora direttamente legato alla corrente di statore
e mantiene una evoluzione sinusoidale.
Tenendo conto del legame tra la velocità di rotazione meccanica del rotore e lo sfasamento tra rotore e
dξ
⇒ ξ = ∫ ω m dt = ω m t + ξ 0
statore ω m =
dt
1
(
)
Abbiamo un flusso concatenato pari a : λr1 = Lm 2 I s sin ω s t − pωm t − pξ 0
Si capisce che l’evoluzione del flusso è funzione anche della velocità meccanica del rotore, infatti un
osservatore posto sul rotore vede il campo di statore ruotare ad una velocità relativa pari alla differenza
tra
la
velocità
di
rotazione
del
campo
e
quella
meccanica
λr1 = L1m 2 I s sin[(ω s − pωm )t − pξ 0 ]
Ciò che cambia sono le velocità di rotazione, quindi al rotore sarà diversa la frequenza con cui si vede
variare il flusso, l’espressione è anche caratterizzata dalla presenza dell’angolo ξ 0 questo è lo
sfasamento tra rotore e statore una volta raggiunte le condizioni di regime.
73
Per ottenere un flusso e conseguentemente una tensione indotta direttamente legate alla pulsazione di
alimentazione si introduce un parametro chiamato scorrimento s =
sostituendo dentro l’espressione del flusso si ha
una tensione indotta del tipo
er1 = −
ω s − pω m
⇒ s ω s = ω s − pω m
ωs
λr1 = L1m 2 I s sin[sω s t − pξ 0 ]
da cui si arriva a
dλr1
= sω s L1m 2 I s cos[sωs t − pξ 0 ]
dt
Anche nella tensione indotta si ha un legame diretto, funzione dello scorrimento, con la corrente di
statore, si nota che anche la pulsazione e quindi la frequenza sono funzioni dello scorrimento,
l’espressione è ancora caratterizzata dalla presenza dell’angolo ξ 0 .
Campo magnetico rotante prodotto al rotore
Dalla analisi fatta precedentemente sappiamo che al rotore è possibile creare un campo magnetico
rotante in due modi. Il primo è quello di creare, alimentando in gli avvolgimenti con una corrente
continua, un campo magnetico stazionario, per poi mettere in rotazione il rotore. Il secondo metodo è
quello di alimentare un avvolgimento trifase al rotore con una terna di correnti simmetriche.
Partiamo alimentando il rotore con una corrente continua e su questa macchina andremo a calcolare le
grandezze elettriche.
Le ipotesi di partenza sono:
1. Correnti
allo
statore
nulle
is1 (t ) = is 2 (t ) = is 3 (t ) = 0 quindi cadute di
f.m.m. nulle
∆Fs11 (α , t ) = ∆Fs12 (α , t ) = ∆Fs13 (α , t ) = 0
2. Rotore caratterizzato da una alimentazione
in continua ir (t ) = I r (t )
Vogliamo conoscere l’andamento delle grandezze
elettriche in questo determinata condizione di
funzionamento.
Partiamo dal calcolo del flusso concatenato allo
statore.
Il calcolo viene eseguito sempre alo stesso modo,
calcolando il flusso concatenato con una sola spira
poi andando a sommare tutti gli elementi di flusso concatenato con l’avvolgimento.
π
ε + πp
ε + πp
2p
2 ˆ
λs1 = p ∫ N s (ε ) ∫ Br1 (α )liRdα Rdε = p ∫
N s cos( pε ) ∫ Br1 (α )liRdα Rdε
π Rπ
π
ε
ε
−
−
2p
2
p
π
2p
1
1
Il campo di rotore visto dallo statore è Br (α , t ) = Bˆ r sin( pα − pω m t − pξ 0 ) quindi
74
ε + πp
ˆ1
2 ˆ
N s cos( pε ) ∫ Br sin( pα − pω m t − pξ 0 )liRdα Rdε
λ s1 = p ∫
π Rπ
ε
−
2p
π
2p
ε + πp
2
λs1 = pBˆ r1 Nˆ s liR ∫ cos( pε ) ∫ sin( pα − pω m t − pξ 0 )dα dε
π
π
ε
−
2p
π
2p
π
2p
2
2
λs1 = pBˆ r1 Nˆ s liR ∫ cos( pε ) cos( pε − pω m t − pξ 0 )dε
p
π
π
−
2p
π
2πp
2p
2
1
λs1 = pBˆ r1 Nˆ s liR ∫ cos(2 pε − pωm t − pξ 0 )dε + ∫ cos( pω m t + pξ 0 )dε
p π
π
π
−
−
2
2
p
p
π
4 µ 0 nr I r 2
8
λ s1 =
ns pliR cos( pω m t + pξ 0 ) = 2 ns nr Γt I r cos( pω m t + pξ 0 )
π δ 2 π
π
p
λs1 = L1sr I r cos( pωm t + pξ 0 )
Come visto prima si nota che il flusso è direttamente legato alla corrente e che la sua pulsazione sarà
pari alla velocità di rotazione del rotore, questo è logico dato che lo statore vede un campo che ruota
proprio alla velocità ωm .
Si può notare che l’espressione del flusso assomiglia molto a quella trovata alimentando lo statore,
infatti questa era pari a:
Ponendo ω m = ω s e
λs1 = L1s 2I s sinωs t =
3 ns
2 nr
3 ns 1
Lsr 2I s sinωs t
2 nr
2 I s = I r si vede che i due flussi hanno lo stesso valore efficace e la stessa
frequenza, quindi il comportamento dei due flussi è identico.
Questa relazione di equivalenza ci permette di alimentare il rotore con una corrente continua, ma
studiarne gli effetti come se fossero prodotti da una corrente fittizia che circola sugli avvolgimenti di
statore. Quindi questo legame mi permette di rappresentare tutte le grandezze elettriche o solamente allo
statore o solamente al rotore, quindi darne una rappresentazione sullo stesso piano, inoltre ci permette di
studiare la macchina con dei circuiti equivalenti con la stessa procedura usata per i trasformatori.
La tensione indotta sarà facilmente ricavabile tramite Faraday-Lenz
dλ
es1 = − s1 = L1sr pω m I r sin p(ω m t + ξ 0 )
dt
Ora rifacciamo gli stessi calcoli considerando un rotore caratterizzato da un avvolgimento trifase
distribuito e alimentato da una terna simmetrica di correnti.
75
Le ipotesi di partenza sono:
1. Correnti
allo
statore
nulle
is1 (t ) = is 2 (t ) = is 3 (t ) = 0 quindi cadute di f.m.m.
nulle ∆Fs11 (α , t ) = ∆Fs12 (α , t ) = ∆Fs13 (α , t ) = 0
2. Rotore caratterizzato da un avvolgimento trifase
distribuito e alimentato con una terna di correnti
simmetriche
ir1 = 2 I r sinω r t
2π
ir 2 = 2 I r sin ω r t −
3
4π
ir 3 = 2 I r sin ω r t −
3
La presenza della terna di correnti nel rotore farà nascere un campo magnetico rotante, che come
µ
3 µ0 ˆ 1
∆Frr cos(ω r t − pβ )
studiato in precedenza sarà pari a: Br1 ( β , t ) = 0 ∆FTr1 ( β , t ) =
2 δ
δ
Analizziamo gli effetti di questo campo sulla macchina. Partiamo dal calcolo del flusso concatenato.
ε + πp
1
Dalla relazione generale λ s1 = p ∫ N s (ε ) ∫ Br (α )liRdα Rdε
π
ε
−
2p
π
2p
si vede che dobbiamo riportare il
campo di rotore alla statore.
Dato che β = α − ξ = α − ω m t − ξ 0 allora
Br1 (α , t ) =
3 µ0 ˆ 1
∆Frr cos(ω r t − pα + pω m t + pξ 0 )
2 δ
Sostituendo e svolgendo i calcoli si trova:
ε + πp
3 µ0 ˆ 1
2 ˆ
λ s1 = p ∫
N s cos( pε ) ∫
∆Frr cos(ω r t − pα + pω m t + pξ 0 )liRdα Rdε
π Rπ
ε 2 δ
−
2p
π
ε + πp
2p
3 µ 0 4 nr 2 I r 2
ns pliR ∫ cos( pε ) ∫ cos(ω r t − pα + pω m t + pξ 0 )dα dε
λ s1 = p
2 δ π
2 π
π
ε
−
2p
π
2p
76
π
λ s1 = p
λ s1 = p
3 µ 0 4 nr 2 I r 2
ns pliR
2 δ π
2 π
2p
2
∫π cos( pε ) p sin (ω t − pε + pω
r
−
m
t + pξ 0 )dε
2p
3 µ 0 4 nr 2 I r 2
3 8
π
ns pliR 2 sin (ω r t + pω m t + pξ 0 ) =
ns nr Γt 2 I r sin (ω r t + pω m t + pξ 0 )
p
2 δ π
2 π
2π2
3
2
λs1 = L1rs 2 I r sin (ω r t + pω m t + pξ 0 ) = L1m 2 I r sin[(ω r + pω m )t + pξ 0 ]
Anche in questo caso si vede che la corrente è direttamente legata al flusso, in più si nota che la velocità
con cui lo statore vede ruotare il campo di rotore è ωr + pωm .
Anche in questo caso potevamo studiare il sistema riportando tutte le grandezze allo statore.
dλ
Otterremo una tensione indotta pari a: es1 = − s1 = − L1m (ω r + pω m ) 2 I r cos[(ω r + pω m )t + pξ 0 ]
dt
Con questo studio abbiamo definito tutti i parametri elettrici e magnetici presenti nella macchina
elettrica rotante.
N.B.
Da questo studio si capisce che un campo magnetico rotante e quindi con una evoluzione di forma
sinusoidale porta ad avere i flussi, correnti e tensioni all’interno della macchina di tipo sinusoidale,
questo non si riuscirebbe mai ad ottenere con un campo ad esempio di forma quadra è per questo motivo
che costruttivamente e grazie alla distribuzione dei conduttori in un determinato modo si cerca di
ottenere campi magnetici di forma sinusoidali.
Analisi della coppia nelle macchine elettriche polifasiche
Sino ad ora si è studiato il comportamento del sistema elettrico e magnetico, la nostra macchina però è
un sistema elettromeccanico quindi dobbiamo studiare il sistema meccanico e capire come avviene la
conversione di energia.
Incominciamo prendendo come riferimento la macchina elettrica, che costruttivamente, risulta essere la
più generica possibile.
Ipotizziamo di avere una macchina costituita da
una terna di conduttori distribuiti sia al rotore che
allo statore.
Lo statore sarà alimentato da una terna di correnti
simmetriche
is1 = 2 I s sinω s t
2π
is 2 = 2 I s sin ω s t −
3
4π
is 3 = 2 I s sin ω s t −
3
che produrrà un campo magnetico rotante del tipo:
77
3 ˆ1
Bs cos(ω s t − pα )
2
3 1
andando a riportarlo al rotore si avrà Btot ( β , t ) = Bˆ s cos(ω s t − pβ − pξ )
2
Btot (α , t ) =
Anche il rotore sarà alimentato con una terna simmetrica di correnti del tipo
ir1 = 2 I r sinω r t
2π
ir 2 = 2 I r sin ω r t −
3
4π
ir 3 = 2 I r sin ω r t −
3
Quindi anche al rotore sarà presente un campo magnetico rotante del tipo:
Br1 ( β , t ) =
µ0
3 µ0 ˆ 1
∆FTr1 ( β , t ) =
∆Frr cos(ω r t − pβ )
2 δ
δ
L’interazione tra questi due campi farà nascere una coppia e quindi si avrà una conversione di energia.
Analizziamo l’espressione della coppia, questa è pari a:
π
2p
Te = −2 pR 2l ∫ ϑr ( β )Bs1 ( β ) dβ
−
π
2p
Ricordando il legame tra densità lineare di corrente e caduta di f.m.m. ricaviamo
∂∆FTr1 ( β , t ) 3 δ
3 4 nr p
ϑr =
=
Br1 sin(ω r t − pβ ) =
2 I r sin(ω r t − pβ )
R∂β
2 µ0 R
2 π 2R
Ora siamo in grado di calcolare la coppia
π
Te = −2 pRl
3 4 nr p 3 µ 0 4 n s 2 I s
2π 2 2 δ π
2
2p
2I r
∫πsin(ω t − pβ ) cos(ω t − pβ − pξ )dβ
r
−
s
2p
Risolvendo tramite Werner
π
2πp
2p
Rl
µ
3
8
0
Te = − p 2 3
n
n
I
I
sin(
t
−
2
p
+
t
−
p
)
d
+
sin(
t
−
t
+
p
)
d
ω
β
ω
ξ
β
ω
ω
ξ
β
r
s
s
r
r
s
r
s
∫
∫π
2π2
2δ
− π
−
2p
2p
µ Rl
3 8
3 8
π
Te = − p 2 3
n n 0 I s I r sin(ω r t − ω s t + pξ ) = − p3
nr ns Γt I s I r sin(ω r t − ω s t + pξ )
2 r s
2π
2δ
p
2π2
3
Te = −3 p L1sr I s I r sin(ω r t − ω s t + pξ ) = −3 pL1m I s I r sin(ω r t − ω s t + pξ )
2
Ricordando la relazione ξ = ω m t + ξ 0 l’espressione finale della coppia è:
Te = −3 pL1m I s I r sin(ωr t − ω s t + pωm t + pξ 0 )
78
Abbiamo ottenuto un solo termine di coppia, questo dovevamo aspettarcelo dato che la coppia si crea
dalla interazione di un solo campo magnetico rotante allo statore e da un solo campo magnetico al
rotore.
Perché si abbia una conversione efficiente di energia la coppia deve presentare un valore costante nel
tempo, questo si ottiene imponendo ω r − ω s + pω m = 0 quindi imponendo il sincronismo tra i campi
di rotore e statore. Come nelle macchine monofasi, lo studio della relazione ωr − ω s + pω m = 0 ci
permette di ricavare l’espressione della coppia relativa a una machina sincrona trifase a poli lisci o a una
machina a corrente continua trifase o a una machina asincrona trifase.
Analizziamo tutte le condizione che ci portano a un diverso tipo di macchina elettrica trifase.
Macchina sincrona
Alimentano il rotore in continua avremo che
risulta essere ωs = pωm ⇒ ωm =
coppia
Te = −3 pL1m I s I r sin pξ 0
ωs
p
ωr = 0
quindi la condizione di sincronismo dei campi
verificando la condizione di sincronismo si ottiene la seguente
abbiamo ricavato la coppia in una macchina sincrona.
Macchina a corrente continua
Alimentando lo statore in corrente continua otteniamo una pulsazione del campo ad esso associato pari a
ωs = 0
quindi per la condizione di sincronismo dei campi, la pulsazione rotorica deve essere uguale a
quella meccanica
ωr = − pωm
Queste caratteristiche sono di una macchina in corrente continua e al
sincronismo dei campi si ottiene la seguente coppia:
Te = −3 pL1m I s I r sin pξ 0
Macchina asincrona
L’ultima condizione di sincronismo è data da
macchina asincrona, che avrà una coppia pari a:
ωs − ωr = pωm
questa è una caratteristica della
Te = −3 pL1m I s I r sin pξ 0
Da questa analisi si vede che tutte le macchina viste hanno caratteristiche di alimentazione differenti, ma
il principio su cui si basano le fondamenta di tutte le macchine è che il campo di statore e quello di
rotore sino perfettamente sincroni, questa è una condizione fondamentale per ottenere una coppia
costante nel tempo.
Se facciamo partire la macchina a rotore fermo, quindi ωm = 0 si vede che l’unica machina che riesce
a produrre coppia costante in questo caso è la macchina asincrona, infatti questa è caratterizzata da
1
se ωm = 0 allora ωs = ωr sostituendo si ottiene Te = −3 pLm I s I r sin pξ 0
Questo vuol dire che la macchina asincrona è una macchina auto avviante, le altre macchine devono
essere portate al sincronismo tramite un dispositivo di avviamento.
ωs − ωr = pωm
Si nota che in tutti i casi il valore della coppia è pari a
Te = −3 pL1m I s I r sin pξ 0
questa dipende dai
parametri geometrici della macchina 3 pL1m , che rimangono costanti, dalle correnti I s I r e dallo
sfasamento ξ 0 Quindi per far variare la coppia si dovrà agire o sulle correnti o sullo sfasamento ξ 0 .
79
Studio della coppia in una macchina elettrica trifase avente coppie polari allo statore
differenti dalle coppie polari al rotore
Si è dimostrato per ottenere un valore di coppia costante nel tempo i campi di rotore e statore devono
essere sincroni, solo allora si avrà un trasferimento di potenza e quindi una conversione utile di energia,
nel caso delle macchine polifasiche si è visto che non si ottengono termini di coppia pulsanti nel tempo
quindi, a differenza delle macchine monofasiche, avremo una conversione efficiente di energia. La sola
condizione di sincronismo non basta a finche si abbia una conversione utile di energia, infatti la
macchina deve presentare, al rotore e allo statore, uguali coppie polari. Solo rispettando entrambe le
condizioni, sincronismo dei campi e uguali coppie polari si riesce ad avere una conversione utile di
energia.
Andiamo quindi a dimostrare che una macchina con un diverso numero di coppie polari al rotore e allo
statore presenta una coppia media nulla e quindi non si ha una trasformazione utile di energia.
Partiamo dall’ipotesi di studiare una macchina trifase alimentata con una terna di correnti sinusoidali sia
al rotore che allo statore. La macchina presenta p s coppie polari allo statore e p r coppie polari al rotore
con p s ≠ p r
2π
La coppia elettromagnetica sarà pari a:
Te = − R 2 l i ∫ ϑr ( β , t )Bs ( β , t )dβ
0
Il campo di statore riportato al rotore sarà pari a:
Btot ( β , t ) =
3 ˆ1
Bs cos(ω s t − p s β − p s ξ )
2
Mentre la densità lineare di rotore sarà:
∂∆FTr1 ( β , t ) 3 δ
3 4 nr p
ϑr =
=
Br1 sin(ω r t − p r β ) =
2 I r sin(ω r t − p r β )
R∂β
2 µ0 R
2 π 2R
Sostituendo nell’espressione della coppia si ottiene:
2π
Te = − R 2 liϑˆr Bˆ s1 ∫ sin(ω r t − pr β ) cos(ω s t − p s β − p sω m t − p sξ 0 )dβ
0
Dividendo l’espressione tramite Werner
2π
2π
Te = − K ∫ sin [(ω r + ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]dβ + ∫ sin [(ω r − ω s + p s ω m )t − ( p r − p s )β + p s ξ 0 ]dβ
0
0
Ora dobbiamo fare due ipotesi infatti p s e p r sono sempre dei numeri interi, ma possono essere dei
valori pari o dispari.
Se p s e p r sono entrambi dei numeri pari o entrambi dei numeri dispari, i termini ( pr + ps ) e
saranno sempre pari. Quindi le due funzioni avranno sempre una periodicità multipla
di due, allora i due integrali lungo tutto un periodo saranno nulli, otteniamo quindi un valore di
coppia nullo.
( pr − ps )
Se p s e p r sono, uno pari e l’altro dispari o viceversa, in questo caso i termini ( pr + ps ) e
( p r − p s ) saranno entrambi sempre dispari. Risolvendo il primo integrale
2π
∫ sin[(ω
0
80
2π
r
+ ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]dβ = [− cos[(ω r + ω s − p s ω m )t − ( p r + p s )β − p s ξ 0 ]]0
= − cos[(ω r + ω s − p s ω m )t − ( p r + p s )2π − p s ξ 0 ] + cos[(ω r + ω s − p s ω m )t − p s ξ 0 ]
il termine ( p r + p s )2π sarà sempre un multiplo di 2π (3 ⋅ 2π ; 5 ⋅ 2π ; 7 ⋅ 2π ) quindi
= − cos[(ω r + ω s − p s ω m )t − p s ξ 0 ] + cos[(ω r + ω s − p s ω m )t − p s ξ 0 ] = 0 Questo termine di coppia
è nullo, infatti in questo caso le aree positive uguagliano quelle negative. Il secondo integrale
sarà sempre nullo, infatti il termine ( p r − p s )2π sarà sempre un multiplo di 2π quindi identico
al caso analizzato precedentemente.
Abbiamo dimostrato che solo con un numero uguale di coppie polari la rotore e allo statore si riesce ad
avere una conversione energetica all’interno della macchina, infatti avendo un uguale numero di coppie
polari riusciamo a svincolarci dalle variabili spaziali ottenendo quindi, una volta messi in sincronismo i
campi, un valore di coppia costante nel tempo e quindi una conversione utile di energia tra il sistema
elettrico e quello meccanico.
Confronto tra macchine elettriche monofasi e macchina elettriche trifasi
Dalle analisi svolte si è notato che, sia per le macchine elettriche monofasi che per le polifasiche l’unico
modo per ottenere un valore di coppia costante nel tempo era avere il perfetto sincronismo tra il campo
di statore e quello di rotore, questa sola condizione non era però sufficiente, infatti un’altra condizione
da verificare era quella per la quale il rotore e lo statore presentassero uguali coppie polari. Solo
verificando entrambe le condizioni, coppie polari uguali e sincronismo tra i campi, si riusciva a ottenere
una conversione di energia. La differenza sostanziale tra una macchina monofasica e una polifasica sta
nel fatto che una macchina monofasica presenta sempre quattro valori di coppia, dovuti all’interazione
dei due campi controrotanti di statore con i due campi controrotanti di rotore. Andando a soddisfare le
due condizione fondamentali, si nota che dei questi quattro termini di coppia alcuni rimangono funzioni
del tempo, quindi a valor medio nullo. I termini pulsanti nel tempo non danno un contributo utile nella
conversione energetica, ma creano solamente vibrazioni quindi portano a delle dissipazioni di energia,
con una macchina monofase non si ottiene una conversione efficiente di energia. Con le macchine
polifasiche non abbiamo questo problema, infatti sia al rotore che allo statore sarà presente un solo
campo magnetico rotante, l’interazione tra il solo campo di statore e del solo campo di rotore genera un
solo valore di coppia costante nel tempo, questo porta a una efficiente conversione di energia tra il
sistema elettrico e quello meccanico. Tra i sistemi polifasici quello più usato è quello trifase perché è il
numero minimo di fasi che serve per ottenere un campo magnetico rotante.
N.B.
Tutto lo studio fatto sin ora è stato svolto ipotizzando il sistema lineare, se questa ipotesi non è più
valida tutto questo studio non è più valido. In tal caso si dovranno usare altri metodi di analisi.
81
82
Macchine elettriche sincrone
Generalità
Le macchine sincrone vengono classificate a seconda della forma del rotore, possiamo avere:
Macchine elettriche a poli lisci o isotropa. Queste macchine hanno il rotore cilindrico, il
traferro è quindi costante.
Macchine elettriche a poli salienti o anisotropa. Queste macchine presentano sul rotore delle
espansioni polari quindi la macchina è caratterizzata da un traferro variabile.
Solitamente queste macchine vengono utilizzate come generatori e presentano il circuito di
eccitazione sul rotore, questo viene alimentato in corrente continua . Il rotore può esser alimentato
tramite delle spazzole rotanti, questa soluzione può andar bene per macchine di ridotta potenza, per
macchine di grossa taglia si preferisce utilizzare dei dispositivi auto eccitanti, anche se oggi si è quasi
totalmente passati al controllo elettronico.
Solitamente queste macchine vengono utilizzate per la conversione dell'energia meccanica in energia
elettrica, la potenza viene quindi erogata verso l'ambiente esterno, come sappiamo bene la maggior
parte dei sistemi elettrici sono di tipo trifase, quindi l’avvolgimento d'indotto risulta essere
l’avvolgimento di statore, mentre l'avvolgimento di eccitazione risulta essere l’avvolgimento di
rotore ed è monofase, naturalmente vengono realizzati gli avvolgimenti in modo tale da
massimizzare la distribuzione di prima armonica.
Per un perfetto ed efficiente funzionamento della macchina è necessario che venga soddisfatta la
condizione di sincronismo ω m =
ωs
e che statore e rotore presentino uguali coppie polari, queste
p
condizioni ci assicurano una coppia meccanica costante e quindi una conversione efficiente di
energia.
Macchina sincrona a poli lisci
Come detto prima, per produrre una coppia meccanica costante dobbiamo fare in modo che le due
distribuzioni prodotte dal rotore e dallo statore risultino essere sincrone e che si abbia lo stesso
1
numero di copie polari. Quindi alimentando lo statore con un sistema trifase di correnti, produciamo
un campo magnetico sinusoidale che presenta una velocità di rotazione meccanica pari a ωs/p
Sul rotore abbiamo un avvolgimento monofasico questo fa si che rispetto allo statore si produca un
campo magnetico rotante che presenta una velocità ωm quindi per realizzare le condizioni di
sincronismo tra queste due distribuzioni dobbiamo fare in modo che i due campi ruotino alla stessa
velocità di rotazione, allora basterà realizzare la condizione che ωm= ωs/p
Quando queste condizioni vengono verificate si produrrà una coppia costante nel tempo (da questa
condizione si capisce che non è una macchina auto avviante).
Un'altra condizione che dobbiamo rispettare è quella che il numero di poli prodotti allo statore e al
rotore siano uguali.
Funzionamento a vuoto
Per lo studio a vuoto della macchina dobbiamo fare delle ipotesi di partenza:
Non colleghiamo nessun carico all'avvolgimento di statore,
i morsetti di statore sono quindi aperti i s1 = i s 2 = i s 3 = 0
Il rotore deve essere alimentato in corrente continua
ir (t ) = I r = cos t
Velocità meccanica costante ω m = cos t
Sappiamo che per questa macchina il campo magnetico
visto dal rotore sarà:
Br1 ( β ) = Bˆ r1 sin pβ
Facciamo quindi il cambio di coordinate.
α=ξ+β Allora β=α−ξ Con ξ=ωm+ξ0
Andando a sostituire β dentro l'espressione del campo
otteniamo:
B r1 (α , t ) = Bˆ r1 sin p (α − ω m t − ξ 0 ) = Bˆ r1 sin( p α − p ω m t − p ξ 0 )
Abbiamo quindi prodotto un campo magnetico rotante alla velocità ωm e di forma sinusoidale.
Esprimendo il tutto tramite la caduta di f.m.m. si avrà:
∆Fr1 (α , t ) =
δ 1
Br (α , t ) = ∆Fˆr1 sin( pα − pω m t − pξ 0 )
µ0
Questo campo magnetico rotante si concatena con le nostre tre fasi di statore, quindi tramite la legge
di Faraday-Lenz otterremo una tensione indotta su ciascuna fase del tipo:
e1 = −
dλs1
dt
Il calcolo del flusso concatenato con le fasi di statore sarà identico a quello svolto nelle generalità,
andremo a calcolare il flusso concatenato con una sola spira per poi andare a sommarlo al flusso
concatenato con tutte le spire del nostro avvolgimento distribuito di statore.
π
π
ε+
2p
p
1
λ = p ∫ N (ε ) ∫ B (α )liRdα Rdε
s1
s
r
π
ε
−
2p
Conosciamo bene sia l’espressione della nostra distribuzione di spire allo statore
2n p
N s (α ) = s cos( pα )
Rπ
2
sia del campo magnetico di rotore visto dallo statore
4 µ 0 nr I r
Br (α ) =
sin p(α − ω m t − ξ 0 )
π δ 2
Sostituendo e considerando il flusso concatenato con la prima fase di statore, otteniamo:
π
π
ε+
2 p 2n p
p 4 µ nI
s
0
r r
cos( pε ) ∫
sin p (α − ω m t − ξ 0 )li Rdα Rdε
λs1 = p ∫
R
2
π
δ
π
π
ε
−
2p
π
π
ε+
2
p
p
2ns p
4 µ 0 nr I r
li R
λs1 = p
∫ cos( pε ) ∫ sin p (α − ω m t − ξ 0 )dα dε
π
π δ 2
π
ε
−
2p
π
4 µ 0 nr I r 2 2 p
∫ cos( pε ) cos p (ε − ω m t − ξ 0 )dε
π
π δ 2 p π
−
2p
π
π
2p
2
p
µ0
8
λs1 = p 2 ns nr li R
I r ∫ cos p (2ε − ω m t − ξ 0 )dε + ∫ cos p(+ω m t + ξ 0 )dε
π
2δ
π
− π
−
2 p
2p
µ
8
π
λs1 = 2 ns nr li R 0 I r cos p(+ω m t + ξ 0 ) = L1m I r cos p(ωm t + ξ 0 )
π
2δ
p
Il flusso concatenato con l'avvolgimento di statore presenta un'evoluzione nel tempo di tipo
cosinusoidale, questo dipende dal fatto che la distribuzione di induzione è sinusoidale, questo è il
motivo per cui si realizzano distribuzioni di induzione sinusoidale nello spazio in modo tale da
ottenere evoluzioni temporali del flusso di tipo sinusoidali, derivando il flusso rispetto al tempo
otteniamo una tensione di tipo sinusoidale.
λs1 = p
2 ns p
li R
es1 = pL1mωm I r sin p (ωmt + ζ 0 )
Abbiamo ottenuto la tensione indotta sulla prima fase di statore, si vede che la pulsazione è uguale
alla velocità del campo, invece il valore efficace della tensione indotta è legato al valore della
corrente sul rotore E 0 =
pL1mω m I r
2
, infatti aumentando la corrente, aumenta il campo, aumenta il
flusso e quindi aumenta il valore della tensione indotta. La tensione aumenta anche all'aumentare di
ωm
Si vede che la tensione e il flusso sono isofrequenziali possiamo quindi rappresentarli sul piano di
Laplace
3
La corrente irf è una corrente fittizia. Infatti sapendo che il legame tra il flusso e la corrente che
produce il flusso è del tipo λs1 = L.i, osservando l'espressione
λs1 = L1m I r cos p(ωmt + ζ 0 )
dalle
'
r
generalità sappiamo che è possibile riportare la corrente di rotore I r allo statore I , infatti queste due
grandezze sono legate da delle semplici costanti
3 ns
2 nr
2 I r' = I r ⇒ I r' =
2 nr
Ir
3 ns
Riportando
la corrente I r allo statore vediamo che il flusso sarà legato al coefficiente di autoinduzione statorico:
λs1 =
3 ns
2 nr
2 I r' L1m cos p(ωmt + ζ 0 ) = L1s 2 I r' cos p(ωmt + ζ 0 )
'
L'espressione I rf (t ) = 2 I r cos p (ωmt + ζ 0 ) la si può considerare come una corrente fittizia che
circolando negli avvolgimenti di statore produce un campo magnetico rotante uguale a quello
prodotto dal rotore, questa corrente risulta essere isofrequenziale sia con la tensione indotta che con
il flusso, è per questo motivo che possiamo rappresentare questa corrente nel piano di Laplace
insieme alle altre grandezze.
Per le altre due fasi, sapendo che gli avvolgimenti sono sfasati tutti di 2π/3 nello spazio, allora sia i
flussi che le tensioni indotte saranno sfasate della stessa quantità, abbiamo quindi ottenuto sulle tre
fasi una terna simmetrica diretta di tensioni.
Questa terna presenta il valore di tensione che dipende dalla corrente di eccitazione Iecc e dalla
velocità di rotazione meccanica ωm.
Naturalmente anche la tensione indotta a vuoto può essere espressa tramite la corrente fittizia I rf
infatti
E0 =
pL1mω m I r 3 ns
=
2 nr
2
2
pL1mω m I r'
= pL1sω m I r'
2
Caratteristica a vuoto della macchina elettrica sincrona
Questo diagramma rappresenta l'evoluzione del valore efficace della tensione a vuoto in funzione di
Iecc e ωm
Se teniamo costante la velocità meccanica vediamo che la
funzione evolve in maniera lineare, questo è vero sino a che
non si arriva alla saturazione della macchina.
Alimentando l'avvolgimento di rotore produciamo un campo
magnetico al traferro, il campo però evolve anche nel ferro
della macchina, aumentando la corrente di rotore aumenta il
campo e quindi aumenta anche la caduta di f.m.m. quindi si
arriva a un punto in cui le cadute di f.m.m. nel ferro non
possono più essere trascurate. Questo mi fa cambiare il
4
campo magnetico totale e quindi avremo che la tensione indotta a vuoto non avrà più un andamento
lineare ma risentirà dell'effetto della saturazione del ferro.
Se cambiamo la velocità di rotazione della macchina cambia il valore della tensione indotta, quindi
per ogni valore di velocità avremo una diversa caratteristica.
La caratteristica a vuoto non solo rappresenta il legame tra la corrente di eccitazione e la tensione
indotta allo statore per una precisa velocità di sincronismo, ma ci rappresenta il legame tra la causa
(correnti) e l’effetto (tensioni indotte). Si vedrà in seguito che la seguente caratteristica potrà essere
usata anche con la macchina a carico.
Funzionamento sotto carico della macchina elettrica sincrona
Ipotizziamo di trascurare tutti i fenomeni transitori, quindi di aver raggiunto la condizione di
funzionamento a regime della macchina e di voler analizzare quale risulta essere l'espressione di
equilibrio elettrico della nostra macchina.
Con lo studio a vuoto abbiamo visto che il campo magnetico rotante, generato dal rotore, induce
sulle tre fasi di statore delle tensioni sinusoidali sfasate l’una dalle altre di 120 gradi elettrici che
presentano una pulsazione e un valore efficace direttamente collegate alla velocità meccanica e alla
corrente di eccitazione.
Ora non alimentiamo il rotore e studiamo il solo comportamento dello statore. Collegando un carico
sulle fasi di statore va a circolare una corrente generica is sfasata di un angolo generico ε in ritardo
rispetto alla E0 (fasore preso come riferimento). Alla terna di correnti is corrisponde un campo
magnetico rotante al quale è associato un flusso di statore λss in fase con la corrente is. Viene quindi
indotto su ciascun avvolgimento una tensione Es che, come per il funzionamento a vuoto, sarà in
ritardo di 90 gradi rispetto alla corrente is.
Per poter analizzare le equazioni d'equilibrio elettrico dovremo applicare a ciascuna delle fasi di
statore l'equazione di kirchoff :
Vi + Ei = Rs ⋅ ii
Vi = tensione applicata alle fasi
Ei = tensione indotta allo statore
RsIi = caduta di tensione sulle fasi di statore
Vista la struttura simmetrica della macchina ci basta fare il calcolo per una fase, i risultati delle altre
fasi possono essere ottenuti semplicemente ruotando di 120° elettrici i diagrammi vettoriali. Quindi
considerando solo la prima fase e sapendo che le grandezze studiate sono di tipo sinusoidale
otteniamo:
V1s + E1ss = Rs ⋅ I s
( E secondo la convenzione dei generatori, V secondo quella degli
utilizzatori )
5
La tensione indotta allo statore è gia stata calcolata nelle generalità, il suo risultato in forma fasoriale
sarà pari a:
Ess = − jωs Ls I s
La presenza di una corrente circolante allo statore fa nascere anche un flusso che si concatena con le
spire di rotore λr, per faraday-lenz a questo flusso sarà associata una tensione indotta dovuta al
campo di statore pari a:
(anche questa espressione era già stata ricavata nelle generalità)
E = − jω L I
sr
s m s
Per ora abbiamo studiato separatamente ciò che succede alimentando solo il rotore o solo lo statore,
ma sappiamo che nelle condizione di funzionamento sotto carico saranno presenti nella macchina
due sorgenti di forza magneto motrice, quella applicata sullo statore e quella applicata sul rotore.
Quindi, visto che gli scambi di energia avvengono in aria (l’aria ha permeabilità costante, siamo
lontani dalle condizione di saturazione) possiamo applicare il principio di sovrapposizione degli
effetti e dire che il campo magnetico presente al traferro (Bδ) sarà pari alla somma del campo
prodotto dall'eccitazione rotorica (Br) più il campo prodotto dalla reazione di armatura dovuto alla
circolazione di corrente (Is) nell'avvolgimento di statore (Bs)
Bδ=Br+Bs
A sua volta Eδ può essere visto come l'effetto della somma del sola tensione di eccitazione più il
solo effetto della tensione indotta allo statore.
B =B + B
δ {r {s
{
E
δ E0 Ess
Ma la tensione complessivamente indotta sulla fase di statore è la somma di due tensioni indotte, una
dal flusso di auto induzione E e l'altra dal flusso di dispersione E .
s
ds
V +E +E +E =R I
1s
0
s
ds
s s
Il flusso di dispersione è quella parte di flusso, generato dalla corrente di statore, che non oltrepassa
completamente il traferro e che quindi si concatena con la sola fase statorica, questi vengono anche
generati dalle connessioni frontali degli avvolgimenti statorici. Possiamo allora individuare questi
flussi nella macchina.
Il flusso di dispersione ha caratteristica lineare e il legame con la corrente circolante
nell'avvolgimento statorico può essere espresso dal coefficiente di autoinduzione di dispersione.
E ds = − jλ s ω s dove λ s = l ds I s sostituendo Eds = − jωs l ds I s = − jX ds I s
La reattanza X ds prende il nome di reattanza di dispersione
Sostituendo si ha nell’equazione di equilibrio elettrico:
6
V1s + Eδ = Rs I s + jX ds I s ⇒ V1s + Es + E0 = Rs I s + jX ds I s
Abbiamo ricavato che i termini di tensione al primo membro sono: la tensione applicata nella fase
statorica dall'esterno e la tensione indotta prodotta dalla sovrapposizione del campo di eccitazione e
di reazione d'armatura.
L’equazione di equilibrio elettrico può ancora esser sviluppata dato che
Quindi
Es = − jωs Lt I s
V1s + E0 − jω
s Lt I s = ( Rs + jX ds ) I s
{
Xt
La reattanza X prende il nome di reattanza al traferro, questa tiene conto del flusso generato dalle
t
tre fasi di statore che oltrepassano completamente il traferro.
Sistemando l’equazione arriviamo ad ottenere
V1s + E0 = Rs I s + j( X t + X ds ) I s
Dove
X s = X t + X ds viene chiamata reattanza sincrona.
Questo termine unisce sia la reattanza a traferro che la reattanza di dispersione, quindi è un
parametro che ci permette di quantificare l’entità della reazione d’armatura. La reattanza sincrona è
un parametro fittizio che non è misurabile a vuoto, ma per quantificarla si deve portare la macchina
in una condizione di carico o in corto circuito. Ciò che è stato detto per la reattanza sincrona vale
solo per le condizioni di linearità, infatti in saturazione Xt non è più costante quindi tutto il modello
della macchina sincrona non è più valido, si deve quindi studiare la macchina con altri metodi.
L’equazione di equilibrio elettrico della macchina elettrica sincrona a poli lisci può esser scritta
come:
E0 = Rs Is + jXs Is −V1s
Se consideriamo la convenzione degli utilizzatori otteniamo il seguente circuito elettrico
convenzione degli utilizzatori
Cambiando convenzione alla tensione d’uscita U = −V
1s
saranno i seguenti
l'equazione e il circuito equivalente
E0 = Rs I s + jX s I s + U
convenzione dei generatori
7
Tra le due rappresentazioni della macchina si preferisce utilizzare l’ultima, definendo il nostro
sistema energetico tramite la convenzione dei generatori, rappresentiamo allora l’equazione di
equilibrio elettrico della macchina tramite il diagramma fasoriale.
E0 = Rs I s + jX s I s + U
Come si può notare nel circuito equivalente compare solo la tensione indotta a vuoto. Prima abbiamo
messo in luce come il campo che mi produce la tensione complessivamente indotta sulla macchina è
il campo al traferro Bδ=Br+Bs. Le modifiche che abbiamo fatto, da un punto di vista modellistico, ci
hanno portato ad esprimere il valore della tensione indotta in funzione della corrente e quindi
esprimerla come una caduta di tensione invece che una tensione indotta. Quindi l'effetto della
reazione d'armatura nella rappresentazione circuitale è all'interno della reattanza sincrona ( Xs), che
quindi non esprime soltanto una dispersione.
Tutte le principali grandezze viste sin ora, sia elettriche che magnetiche, possono essere
rappresentate nello stesso diagramma, partendo dal diagramma a vuoto
Ipotizziamo di essere in condizione di regime e ipotizziamo di conoscere la corrente Is sia in modulo
che in fase. Applicando il principio di sovrapposizione degli effetti possiamo subito ricavare Es,
perché alla corrente Is corrisponde una caduta di forza magneto motrice allo statore. Questa caduta di
forza magnetica motrice crea un flusso di reazione d’armatura che si concatenerà con la fase di rotore
secondo la regola λr1 =Lt Is Questo vuol dire che il flusso è legato alla corrente tramite una semplice
costante. Conoscendo il flusso immediatamente conosciamo la tensione indotta perché, tramite
Faraday-Lenz, questa è in quadratura in ritardo rispetto al flusso che l’ha prodotto. Si trova inoltre Eδ
come la somma di E0 con Es .
8
Il motivo per cui andiamo ad esplicitare l'equazione di equilibrio elettrico in funzione di E0 è dato dal
fatto che modificando la Iecc dall’esterno, possiamo regolare E0 e quindi regolare il funzionamento
elettrico della macchina.
Studio della coppia in una macchina elettrica sincrona
Analizziamo ora la distribuzione dei campi magnetici al traferro quando abbiamo una determinata
condizione di funzionamento della macchina ben definita, per poi arrivare all’espressione e allo
studio della coppia.
Ipotizziamo di conoscere: le condizioni di funzionamento a vuoto (prese come riferimento), flusso di
statore, la tensione indotta a vuoto e il valore della corrente I
s
Si ipotizza che la macchina sia collegata a un carico equilibrato, se fosse collegata a un carico
squilibrato le correnti nelle fasi sarebbero diverse e produrrebbero dei campi di diversa natura, la
macchina in questo caso perde la simmetria. Noi ci poniamo in una condizione di equilibrio quindi la
macchina viene alimentata da una terna di correnti simmetriche.
Nel diagramma viene rappresentato il comportamento di una fase perché le altre due hanno un
comportamento identico ma sfasato di 120 gradi.
Vogliamo vedere quale risulta essere la distribuzione del campo magnetico di reazione d'armatura
rispetto a quello di eccitazione, per fare questo dobbiamo calcolarci il campo magnetico di reazione
d'armatura riferendoci al sistema rotorico.
Partiamo dall’analisi delle correnti circolanti nella macchina.
'
'
La corrente I ' è una quantità nota e pari a I r1 (t ) = I r cos p (ωmt + ζ 0 ) prendendo questa come
r1
riferimento si vede che la corrente allo statore sarà sfasata di una quantità π + ε in ritardo rispetto
2
'
alla I , quindi otterremo un’espressione del tipo
I = 2 I sin pωmt + pξ0 −ε
r1
s1
s
(
)
Il campo magnetico generato da questa corrente relativa alla prima fase di statore è pari a:
9
µ 4 n 2I
s
s sin pω t + pξ − ε sin pα = Bˆ1 sin pω t + pξ − ε sin pα
B1 (α , t ) = 0
s1
m
0
s
m
0
2
δ π
(
)
(
)
Lo stesso discorso è valido per la seconda fase
2π
2π
B1 (α , t ) = Bˆ1 sin pω t + pξ − ε −
sin pα −
s2
s
m
0
3
3
(
)
Anche per il campo della terza fase si avrà uno sfasamento sia nello spazio che nel tempo
4π
4π
B1 (α , t ) = Bˆ1 sin pω t + pξ − ε −
sin pα −
s3
s
m
0
3
3
(
)
Tramite Werner
Bˆ s1
cos( pω t + pξ − ε − pα ) − cos( pω t + pξ − ε + pα )
m
m
0
0
2
Bˆ 1
4π
Bs12 (α , t ) = s cos( pω t + pξ − ε − pα ) − cos pω t + pξ − ε + pα −
m
0
0
2
3
m
Bˆ 1
2π
Bs13 (α , t ) = s cos( pω t + pξ − ε − pα ) − cos pω t + pξ − ε + pα −
m
0
0
2
3
m
Bs11 (α , t ) =
[
]
Per ricavare il campo totale sommiamo le tre distribuzioni
Bs (α , t ) =
3 ˆ1
Bs cos( pω t + pξ − ε − pα )
m
0
2
Ora riportiamo tutto su un sistema di riferimento che risulta essere più semplice da analizzare, per
poter studiare meglio i due campi li riportiamo sul sistema di riferimento del rotore.
Sappiamo che α = β + ω t + ξ sostituendo nel campo di statore si ottiene:
m
0
ε
Bs (β ) = Bˆs cos p(β + )
p
Il campo di rotore è pari a:
Br (β ) = Bˆr sin pβ
In questo modo però perdiamo la dipendenza dal tempo. Questi due campi ora sono stazionari e
sincroni, inoltre sono sfasati di π + ε in termini di angoli meccanici. Tra angoli elettrici e angoli
2p
p
meccanici c'è una certa corrispondenza, perché se le grandezze elettriche che hanno dato origine a
questi due campi sono sfasati di un angolo pari a π + ε
2
Le corrispondenti grandezze magnetiche saranno sfasate dello stesso angolo fratto il numero di
coppie polari, in anticipo o in ritardo.
Analizzando il diagramma si può quindi notare lo sfasamento fra le grandezze magnetiche relativo a
una coppia polare.
10
Questo diagramma temporale illustra le due distribuzioni del campo magnetico prodotto dal rotore e
una distribuzione generica prodotta dallo statore.
Piuttosto che utilizzare questa rappresentazione è conveniente scomporre il campo di statore,
siccome siamo in regime di linearità possiamo dividere il campo di statore in due campi che risultano
essere di più facile analisi e andiamo ad associarli a degli assi di riferimento particolarmente utili per
il calcolo delle coppie (l’asse in quadratura rispetto al campo magnetico di eccitazione e l'asse in
fase). Basta applicare le formule di addizione
ε
Bs (β ) = Bˆ s cos p(β + ) = Bˆ s [cos pβ cos ε −sin pβ sin ε ]
p
Per cui riportando la stessa distribuzione sul grafico si ottiene come lo stesso campo risulta essere
decomposto in uno in quadratura con il campo di eccitazione B sq e uno in fase Bsd .
11
Potevamo arrivare allo stesso risultato analizzando le correnti, sapendo che Bˆ = 3 4 µ n s 2 I
s
0
s
2π
andando a sostituirlo si ottiene
Bs (β ) =
2δ
3 4 ns 2
µ
I [cos pβ cos ε − sin pβ sin ε ]
2 π 0 2δ s
Si ottiene che tutti i termini costanti vanno formare una quantità
K=
caratteristica della macchina.
3 4 n s 2 che dipende dalla
µ
2 π 0 2δ
Quindi dalle componenti di corrente si può risalire alle componenti di campo e alle distribuzioni
spaziali del campo magnetico al traferro di statore e di rotore.
In altre parole analizzando il diagramma vettoriale si vede che, se noi consideriamo la I ( rispetto al
s
sistema riferimento scelto) la I e la I
mi permettono di ricavare i valori del campo. Ma anche i
sd
sq
loro valori reciprochi perché alla condizione in quadratura corrisponde un campo magnetico in
quadratura in anticipo di 90° rispetto a quello di eccitazione, in quello in fase corrisponde un angolo
che risulta essere di π in ritardo (o in anticipo, sempre di π si tratta ) e quindi sempre in
opposizione.
Quindi possiamo procedere al calcolo della coppia con il solito procedimento.
π
p
Te = − p R l ∫ ϑ r ( β ) Bδ1 ( β ) d β
2
−
π
p
∂∆Fr ( β , t ) δ ∂Br1 ( β )
=
Sappiamo che il campo al traferro B1 (β ) = B1(β ) + B1(β ) e che ϑr =
δ
r
s
R∂β
µ0 R∂β
le due funzioni ϑr e B1 saranno entrambe sinusoidali e perpendicolari tra loro, quindi il loro integrale
r
π
p
1
sarà pari a zero. Il calcolo della coppia sarà quindi dato da Te = − p R l ∫ ϑ r ( β ) B s ( β ) d β
2
−
dove
p 2nr
ϑr ( β ) =
I cos pβ
R π r
π
p
sostituendo i termini si ottiene
π
3 4 ns 2
Te = − p Rl
Ir µ0
Is
2 π 2δ
π
2
12
2 nr
p
∫π cos p β [cos ε cos p β − sin ε sin p β ] d β
−
p
Si nota subito che i termini in seno portano un contributo nullo in quanto il loro integrale col termine
in coseno è pari a zero, quindi avremo solo espressioni in coseno
π
2 nr
3 4 ns 2
Te = − p Rl
Irµ0
Is
2 π 2δ
π
2
p
∫π cos
−
2
p β cos ε d β
p
π
p
dato che
∫π cos
−
2
pβ dβ =
π
p
+
1
[sin( π ) cos( π ) − sin( −π ) cos( −π ) ] = π
2
p
p
Te = − p
Dato che
allora
3 ns
2 nr
3 8 πRl
µ 0 n r n s I r 2 I s cos ε
2 π 2 2δ
2 I r' = I r si ottiene:
Te = −3 pLs I r' I s cos ε
Facendo l'analisi dei campi si ottiene lo stesso risultato. Ricordando che la densità lineare di corrente
è la derivata del campo, possiamo tracciare un diagramma approssimativo.
Si nota che le due distribuzioni di densità lineare di corrente sotto un polo di eccitazione sono
esattamente simmetriche. Applichiamo la legge di Lorenz, tutta la parte positiva darà una risultante
pari e opposta alla risultante dalla parte negativa. Quindi le distribuzione in fase danno come risultato
una coppia pari a zero.
13
Facciamo lo stesso discorso per la componente in quadratura. In questo caso le correnti sotto un polo
risultano essere negative e le forze possono assumere solo un verso. Le forze risultano essere
concordi e si sommano. Quindi
Bsq è quel campo che interagendo con Becc è responsabile della
produzione di coppia.
Te = −3 pLs I r' I s cos ε
la coppia è negativa perché forniamo potenza meccanica alla macchina e
questa reagisce alla coppia applicata. Possiamo scrivere la coppia in un altro modo. Sappiamo che
E0
E0
la macchina deve esser
= L I ' sostituendo nell’espressione della coppia
I cos ε
ωs s
E
sincrona quindi ω s
l’espressione della coppia sarà
Te = −3 0 I s cosε
= ωm
p
ωm
ωs
Te = −3 p
s r
Andiamo ora a studiare quando la macchina si comporta da generatore e quando da motore.
Dalle equazioni di equilibrio meccanico, sappiamo che il momento d’inerzia per l'accelerazione
meccanica risulta essere uguale alla somma della coppia elettrica della coppia meccanica.
j
dω m
= Te + Tm
dt
Se consideriamo come verso positivo quello della velocità meccanica, la coppia elettrica e la coppia
meccanica concordi con il verso di rotazione. Si nota che la macchina presenta un'accelerazione nulla
e quindi una velocità costante a regime. In questo caso la coppia elettrica e la coppia meccanica
devono essere uguali e opposte.
Te = −Tm equazione di equilibrio meccanico
14
I funzionamenti della macchina sincrona potranno essere:
Da generatore convertiamo energia meccanica in energia elettrica.
Dato che il nostro sistema energetico è definito secondo la convenzione dei generatori la
Pe > 0
macchina nel funzionamento da generatore è caratterizzata da Pm > 0
Tm concorde con ω
Te discorde con
m
ωm
Vista l’analisi fatta precedentemente
Te ωm = −3E0 I s cosε
quindi dall’equazione di
equilibrio meccanico Te = −Tm si ottiene una potenza meccanica P = T ω = 3E I cosε
m
m m
0 s
Affinché la macchina funzioni da generatore − π < ε ≤ π
2
solo in questo caso la potenza è
2
maggiore di zero.
Da motore la potenza elettrica viene convertita in potenza meccanica, il comportamento
della macchina è quindi opposto al caso precedente.
Pe < 0
La macchina è caratterizzata da Pm < 0
Te = −Tm i versi sono sempre opposti ma convenzionalmente diversi
Te concorde con ω
m
Tm discorde con ω
m
Analizzando la potenza meccanica P = T ω = 3E I cosε questa è minore di zero per
m
m m
0 s
π
3π
− ≤ε < −
2
2
quindi siamo in un funzionamento da motore.
Rappresentiamo infine la due zone di funzionamento della macchina.
15
Leghiamo ora la coppia elettromagnetica alla coppia meccanica, cerchiamo quindi di legare i sistemi
che costituiscono la nostra macchina, sistema elettrico, magnetico e meccanico.
Per ottenere il valore della coppia elettromagnetica possiamo partire dalla definizione di potenza
elettrica erogata in rete per una macchina sincrona trifase funzionante da generatore
Pe = m sU ⋅ I s ⋅ cos ϕ
Utilizzando la convenzione dei generatori, perché stiamo erogando potenza, si può trovare il
rendimento come il rapporto tra la potenza elettrica totale e la potenza meccanica.
P
P m
η = e ⇒ Pe = ηPm
sostituendo otteniamo
Pm = Tm ⋅ ωm = e = s U ⋅ I s cos ϕ la potenza
η
η
Pm
meccanica è quindi legata direttamente alle grandezze elettriche in uscita dalla macchina, questo è
ms
vero anche per la coppia meccanica Tm =
U ⋅ I s cos ϕ Se consideriamo che la macchina deve
η ⋅ ωm
esser rispettata la condizione di sincronismo ω m =
Tm =
ωs
p
la coppia può esser scritta come:
p ms
U ⋅ I s cos ϕ
η ⋅ ωs
La potenza e la coppia meccanica possono essere legate ad altre grandezze elettriche presenti nella
macchina, infatti la potenza elettrica può anche esser espressa come:
*
Pe = m s ℜe{U ⋅ I s* }
(con I complesso coniugato)
Dall’analisi precedente abbiamo visto che la potenza elettrica è legata alla potenza meccanica tramite
il rendimento di macchina.
P
m
Pm = Tm ⋅ ω m = e = s ℜe{U ⋅ I s* }
η
η
Possiamo ora ricavare il valore della coppia meccanica e usando l'espressione
U = E 0 − jX s I s − Rs I s dell'equazione equivalente della macchina sincrona otteniamo:
Tm =
16
ms
ℜe (E0 − jX s I s − Rs I s ) ⋅ I s*
η ⋅ ωm
{
}
Il termine (− jX s I s ⋅ I s* ) sarà sempre una quantità immaginaria, ma a noi interessa solo la parte reale,
quindi il termine precedente non va considerato. Tenendo già conto degli effetti joule nel rendimento
possiamo non considerare il termine (− Rs I s ⋅ I s* ) , quindi
Tm =
ms
ms
ℜe E 0 ⋅ I s* =
E 0 ⋅ I s cos ε
η ⋅ ωm
η ⋅ ωm
{
}
Se consideriamo che la macchina deve esser rispettata la condizione di sincronismo ω m =
coppia può esser scritta come
Tm =
ωs
p
la
p ms
E 0 ⋅ I s cos ε
η ⋅ ωs
Questa espressione era già stata ricavata precedentemente sotto forma di potenza meccanica al netto
delle perdite P = 3E I cosε dove ε è l'angolo compreso tra E0 e Is Nel diagramma vettoriale
m
0 s
avremo
La coppia risulta essere data dal prodotto tensione E0 per la componente della corrente Is che risulta
essere in quadratura (Isq) con il campo di eccitazione rotorico (Br). Abbiamo ottenuto dalle
grandezze elettriche lo stesso risultato che avevamo ottenuto analizzando la coppia elettromagnetica.
La coppia elettromagnetica risulta essere costante quando le due distribuzioni risultano essere
sincrone, quando hanno lo stesso numero di coppie polari e risulta massima quando le due
distribuzioni sono in quadratura.
Se io modifico il valore della coppia meccanica varia immediatamente il valore della Isq, quindi a
seconda delle condizioni operative varia l'angolo ε, conseguentemente varia la fase tra la corrente
statorica e la tensione in uscita dalla macchina.
L’espressione della coppia meccanica può assumere anche altre forme, vedremo che può legarsi
anche ad altre grandezze elettriche.
Ipotizziamo che la corrente di eccitazione sia costante e che sia noto il valore di U e di Is la potenza
Pe = m f ⋅ E 0 ⋅ I s cos ε
elettrica risulta
Vediamo cosa succede al diagramma vettoriale quando modifichiamo la coppia elettromagnetica
(direttamente legata alla coppia meccanica).
Tm =
p ⋅ m f ⋅ E0 ⋅ I s
ω s ⋅η
cos ε
dove E 0 = k ⋅ I r ⋅ ω m
k = costante di macchina
17
Per la condizione di sincronismo ω m =
ωs
p
Tm =
mf ⋅ k ⋅ Ir ⋅ Is
η
cos ε
Quindi con una corrente di eccitazione costante I = cos t ,
r
T è influenzata solo dal termine
m
come dimostra il diagramma vettoriale.
I cos ε che è la componente in fase di I rispetto a E
s
s
0
Al variare di ε varia l'angolo θ detto angolo di carico, questa ci da alcune indicazioni sulla coppia
applicata alla macchina.
Al crescere della coppia cresce l’angolo di carico ( Te >>
θ >> )
Al decrescere della coppia decresce l’angolo di carico ( Te <<
θ << )
Se la coppia è nulla allora θ =0
L'angolo di carico è una quantità elettrica che risulta essere strettamente connessa a una grandezza
meccanica, ecco perché viene usato per rappresentare l'evoluzione della coppia elettromagnetica.
Dimostriamo che θ influenza Tm
Partendo dal diagramma vettoriale e ipotizziamo di conoscere
il valore di U e di Is in oltre sappiamo che le macchine
elettriche sincrone vengono usate principalmente per la
generazione e presentano rendimenti molto elevati, il valore
di Rs è quindi trascurabile rispetto alla Xs l’equazione di
equilibrio
elettrico
può
esser
approssimata
a
E0 = jX s I s + U rappresentato dal seguente diagramma.
Trasformiamo il diagramma delle tensioni in un diagramma delle correnti
E0
U
= Is +
jXs
jXs
Per determinare la componente di I cos ε quindi la
s
componente in quadratura, devo semplicemente
considerare la direzione di E 0 e trovo I
sq
U
senθ
I sq =
Xs
Nell’ipotesi che X sia costante (la macchina funziona in regime lineare), si vede subito come la I
s
sq
risulta direttamente vincolata all’angolo θ .
θ è un angolo elettrico che ci da informazioni importanti sull’andamento della coppia
elettromagnetica
sostituiamo Isq nella formula della coppia, ottenendo:
18
Tm =
m f ⋅ p ⋅ E0 ⋅ U
η ⋅ X s ⋅ ωs
senθ =
m f ⋅ k ⋅ I r ⋅U
η⋅ Xs
senθ
U è una variabile d'uscita che teoricamente può assumere qualsiasi valore, ma in realtà è fissato dal
costruttore ed è legato alla macchina e al tipo di carico collegato. Generalmente il valore U in
ampiezza e in frequenza sono una quantità definite e costanti, questo si chiama collegamento alla rete
di potenza prevalente. Sotto quest'ipotesi si vede che la coppia elettromagnetica fornita dalla
macchina risulta definita da due parametri da Ir e da θ quindi dall'analisi dei parametri elettrici si
può risalire immediatamente ai parametri meccanici della macchina.
θ positivo funzionamento da generatore
θ negativo funzionamento da motore
Questi due grafici sono entrambi validi solamente per il funzionamento a regime della macchina,
quando ω è costante e T = −T Applicando una variazione di coppia meccanica positiva la
m
e
m
macchina accelera, in questo caso l’unico diagramma valido sarà quello relativo alla coppia
elettromagnetica.
L’espressione della coppia è stata ricavata per via analitica, ma poteva esser ricavata anche per via
grafica, questo secondo metodo è sicuramente molto più veloce del primo.
Partendo dall’equazione di equilibrio elettrico approssimato E 0 ≅ jX s I s + U e del diagramma
X s I s cos ε = U sin ϑ ⇒ I s cos ε =
U
sin ϑ
Xs
Dalle analisi precedenti sappiamo
che
Pm = Tm ωm = Tm
ωs
p
= 3E0 I s cosε
sostituendo otteniamo
3 pE0U
Tm =
sin ϑ
ωs X s
L’espressione è identica a quella precedentemente ricavata a meno delle perdite.
Macchina sincrona su rete di potenza prevalente
19
Andiamo ad analizzare il comportamento della macchina sincrona collegata su una rete di potenza
prevalente, che per definizione è una rete in cui la terna delle tensioni rimane invariata, l’ampiezza
della tensione e frequenza rimangono costanti (U = cost ; ω = cos t ) qualunque sia la condizione
s
di funzionamento della macchina.
Per collegare la macchina sulla rete occorre creare il parallelo in maniera tale da evitare una
circolazione di correnti all'interno della macchina che possono portare a sollecitazioni elettriche e
meccaniche.
Dall'equazione di equilibrio elettrico Eo = jX s I s + U , se nell'istante t =0 di collegamento E0 e U
sono uguali in modulo e in fase Eo = U ⇒ Eo − U = jX s I s = 0 ⇒ I s = 0 Quando la macchina è in
queste condizioni di funzionamento si dice flottante su rete, la macchina è collegata alla rete e non
eroga ne assorbe potenza.
Se non è vera la condizione Eo = U , perché sia rispettata l'equazione di equilibrio elettrico deve
nascere una jX I che la verifica, questo significa che circola una corrente di statore. Questa
s s
corrente, per la legge faraday-lenz, tende ad opporsi alla causa che l’ha generata, produce coppia e
flusso (intenso) che potrebbe danneggiare la macchina. Si deve evitare, collegando la macchina alla
rete, che ci sia una jX I cioè una differenza di tensione ( ∆V ) tra E0 e U.
s s
Una differenza di potenziale tra E0 e U può nascere per vari motivi o perché non abbiamo regolato la
corrente di eccitazione o perché non abbiamo regolato la velocità di rotazione del motore primo.
Se non vengono rispettate queste due condizioni al momento in cui si realizza la chiusura
dell'interruttore si verifica un’intempestiva circolazione di corrente. Per evitare questi problemi si
realizza la chiusura quando E0 e U sono in fase, seguendo la seguente procedura di collegamento alla
rete.
20
La prima cosa da fare è portare la macchina a una velocità
ωm =
ωs , successivamente si aumenta la
p
corrente di eccitazione e tramite un voltmetro si controlla che la tensione, in valore efficace, in uscita
dalla macchina sia uguale a quella presente sulla rete.
Dopodiché si va a verificare la differenza di potenziale tra le due fasi, infatti possiamo avere la
macchina al sincronismo, le tensioni di rete e di eccitazione uguali in modulo, ma a causa dello
sfasamento iniziale i due vettori si ritrovino sfasati l'uno rispetto all'altro. Per ovviare quest'ultimo
problema basta mandare la macchina in ipersincronismo o iposincronismo in modo che il vettore E0
aumenti o rallenti la sua velocità (in ipersincronismo la frequenza di E0 risulta essere superiore
viceversa per iposincronismo).
Un tempo questo si faceva con un sistema di lampade collegate alle tre fasi, se le lampade si
accendevano intermittenti in un senso concorde a quello della velocità voleva dire che la macchina
doveva essere mandata in iposincronismo, viceversa se il senso era discorde. In questo modo si
produceva una perfetta fasatura tra E0 e U, quando le lampade non si accendevano più si chiudeva
l'interruttore e le macchina era flottante su rete.
21
Ora ci sono dispositivi automatici che rilevano i vari parametri e chiudono in automatico la macchina
sulla rete quando si ha l’uguaglianza dei due fasori, anche se c'è sempre una piccola circolazione di
corrente.
Parallelo su rete
Abbiamo realizzato la condizione di parallelo su rete, quindi come visto precedentemente la corrente
statorica circolante nella nostra macchina sincrona è pari a zero, in questo modo la potenza attiva e
quella reattiva sono pari a zero.
Modificando le condizioni di eccitazione, andiamo a ipereccitare la macchina, ossia aumentiamo la
corrente di eccitazione (Iecc) in modo tale che mi produca una tensione indotta a vuota che risulti
essere, in valore efficace, maggiore della tensione di rete (E0>U). Sappiamo che la condizione di
equilibrio elettrico deve essere sempre rispettata per cui nasce, sul nostro sistema, la tensione jX I
s s
Questo significa che avremo una corrente Is che risulta in quadratura e in ritardo di 90° rispetto alla
tensione U. In questo modo abbiamo una erogazione di sola
potenza reattiva secondo la convenzione dei generatori.
22
ϕ=
π
2
Q = m f UI s senϕ = m f UI s
P = m f UI s cosϕ = 0
La macchina eroga solo potenza reattiva di tipo induttivo, la rappresentiamo quindi come un
utilizzatore.
Se cambiamo la convenzione (passiamo da quella dei generatori a quella degli utilizzatori) la stessa
condizione di funzionamento viene rappresentata da una corrente che risulta essere in opposizione
rispetto alla corrente Is. A questo punto lo sfasamento diventa di 90° in anticipo. Quindi questo tipo
di funzionamento è quello di un condensatore (condensatori rotanti )
Da generatore Q > 0
Da utilizzatore Q < 0
Proviamo a fare l’operazione inversa, variamo la nostra corrente rotorica (Iecc) in modo tale che mi
produca una tensione indotta a vuoto che risulti essere, in valore efficace, minore della tensione di
rete (E0<U) in questo caso siamo in una situazione opposta a prima stiamo ipoeccitando la macchina.
Anche in questo caso l’equazione di equilibrio deve essere rispettata Eo = jX s I s + U quindi nasce
una corrente Is che risulta essere in quadratura e in anticipo con la U.
Diagramma
π
ϕ =−
2
Q = m f UI s senϕ = −m f UI s
P = m f UI s cosϕ = 0
Come prima abbiamo una produzione di potenza attiva nulla, ma sta erogando una potenza attiva di
tipo capacitivo.
Andiamo ad approfondire meglio il funzionamento della macchina in queste condizioni.
Condensatore rotante macchina ipereccitata.
23
Partiamo da una macchina flottante su rete dove il solo campo presente è
Br
infatti con
macchina flottante su rete la Is=0 quindi il campo al traferro è il solo campo di eccitazione.
= Br così
Aumentando la corrente di eccitazione si aumenta il campo di eccitazione B
ecc
aumenta il valore della tensione indotta a vuoto, questa situazione fa circolare una corrente di
statore che chiude il diagramma di equilibrio elettrico.
La corrente Is si trova in opposizione di fase rispetto alla Ir, questo significa che il campo di
reazione
Bs
sarà in opposizione di fase rispetto a quello di eccitazione. Il sistema fa
circolare una corrente che tende a smagnetizzare la macchina per riportarla alla condizione di
equilibrio iniziali. Questa fa in modo che la macchina eroghi potenza induttiva e ne assorba
reattiva capacitiva dalla rete, affinché si riporti nella condizione di equilibrio iniziale.
Induttore rotante macchina ipoeccitata.
Partiamo sempre da una macchina flottante su rete, con il solo capo di eccitazione presente al
traferro. Ipoeccitando la macchina avrò un campo di eccitazione B
minore rispetto a quello
ecc
di partenza, in questo caso la tensione di eccitazione è minore della tensione di rete, la Is
24
(ruotata di 180 gradi rispetto al caso precedente) è in fase con la Ir, quindi il campo di
eccitazione e il campo di reazione d'armatura
Bs
sono in fase. Il campo di reazione tende
quindi a magnetizzare la macchina per riportarla nella condizione di equilibrio. La macchina sta
funzionando come un induttore rotante, assorbe potenza reattiva induttiva ed eroga potenza
reattiva di tipo capacitivo.
Queste macchine vengono utilizzate per rifasare carichi in alta tensione, dove utilizzare dei
condensatori sarebbe troppo oneroso e di difficile regolazione.
La nascita di una corrente di statore non è dovuta solamente a una ipoeccitazione o alla
ipereccitazione, ma anche alla applicazione di una coppia meccanica, studiamo questa condizione di
funzionamento. Ipotizziamo di avere già realizzato tutte le procedure per porre in parallelo una
macchina elettrica sincrona alla rete (U ed E0 saranno in fase e con la stessa ampiezza e frequenza)
vogliamo analizzare che cosa accade quando applichiamo una coppia di carico all’asse della nostra
dω m
= Te + Tm sappiamo che all'istante di t0
macchina. Dall'equazione di equilibrio meccanico j
dt
precedente all'applicazione della coppia meccanica Te= Tm= 0 con macchina flottante su rete non si
ω
ha conversione di energia. La velocità ωm sarà costante e pari a ω m = s condizione di perfetto
p
sincronismo.
Applichiamo la coppia meccanica alla macchina, definito il verso della velocità positiva,
aggiungiamo alla macchina una coppia meccanica che risulta concorde con la velocità di rotazione
(risulta che Pm>0 )
Nel momento in cui applichiamo la nostra coppia meccanica la condizione analizzata non risulta
essere più valida. La coppia elettrica all'istante t0+ risulta essere ancora uguale a zero, ma la coppia
meccanica è diversa da zero. L'equazione di equilibrio meccanico sarà j
dω m
= Tm 0+
dt
la macchina
è sottoposta a una variazione di velocità e visto che la coppia è concorde alla velocità la macchina è
ω
soggetta a un'accelerazione ω m > s questa è una condizione di ipersincronismo.
p
Il vettore U ha frequenza ω s e come detto prima questa pulsazione rimane costante dato che si è
ipotizzato che la macchina è collegata a una rete di potenza prevalente, mentre Eo avrà una
frequenza pω m per cui la frequenza della tensione indotta è superiore alla frequenza della tensione
applicata sulla rete. Possiamo anche dire che Eo ha una velocità relativa in anticipo rispetto al vettore
U.
25
Nasce una differenza di potenziale tra E0 e U questa è compensata dalla caduta di tensione sulla
reattanza Xs dovuta alla circolazione di una corrente Is. L’applicazione della coppia ha quindi creato
una differenza di potenziale tra E0 e U.
Vediamo gli effetti dei campi dovuti a questa corrente.
Quando il vettore E0 comincia a sfasarsi nasce una corrente di statore, questa genera una caduta di
tensione sulla Xs che chiude il diagramma delle tensioni e genera un campo di reazione. La Is
presenta una componente di corrente in fase e una in quadratura rispetto al flusso di eccitazione,
studiamo il comportamento di queste due correnti.
La corrente Isq fa nascere una coppia elettromagnetica Te, questo processo proseguirà fino a quando
la Isq non produrrà una coppia elettromagnetica tale da compensare completamente la coppia
meccanica applicata, ripristinando l'equilibrio tra le due coppie. Quando le due coppie sono
nuovamente in equilibrio avremo una particolare configurazione tra θ e Eo , in cui si avrà
nuovamente il sincronismo tra i vettori E0 e U.
All'applicazione di una coppia meccanica non corrisponde la produzione di sola potenza elettrica
attiva, ci sarà anche una componente di potenza elettrica reattiva. Questo fatto è dovuto
all'applicazione della legge di faraday-lenz, infatti la macchina non si oppone solamente alla
variazione di coppia meccanica, ma anche al campo di eccitazione. La corrente Isd genera un campo
che si oppone al campo di eccitazione, infatti i due campi sono in opposizione di fase. Questo fatto
tende a smagnetizzare la macchina e fa produrre potenza reattiva.
26
Per poter gestire le due aliquote di potenza in uscita non possiamo agire solo su una variabile
d’ingresso, ma su tutte e due le variabili di ingresso, coppia e corrente di eccitazione. Infatti
applicando una coppia meccanica, ma anche aumentato la corrente di eccitazione avremmo potuto
ottenere la corrente Is in fase con la tensione U, trasformando la potenza meccanica, fornita in
ingresso, in sola potenza elettrica attiva, lasciando la parte reattiva nulla Q = 0.
Diagramma circolare
Possiamo tracciare il diagramma circolare della macchina elettrica sincrona partendo dall'equazione
di equilibrio elettrico
E 0 = jX s I s + U
Invece di ragionare sul diagramma delle tensioni conviene farlo sul diagramma delle correnti,
semplicemente ricavabile dividendo tutta l’equazione per jXs, questo fa ruotare tutto il diagramma di
90 gradi. La macchina è collegata a una rete di potenza prevalente, la tensione applicata U è costante
e la scegliamo come riferimento in modo tale da poter definire le potenze.
Eo
U
= Is +
jX s
jX s
Possiamo associare al diagramma delle correnti quello delle potenze elettriche, visto che Pe è
direttamente proporzionale alla Isq
27
Pe = m f U ⋅ I s cos ϕ
424
3
{ 1
K
I sq
Le potenze reattive sono proporzionali alla Isd
Qe = m f U ⋅ I s senϕ
{ 123
K
I sd
Quindi a ciascun punto del piano corrisponde una condizione di funzionamento della macchina,
grazie ai corrispondenti valori di Pe e di Qe questo piano prende il nome di piano delle potenze
ESEMPIO: Vogliamo portare la macchina da una condizione di erogazione di potenza elettrica Pe1 e
Qe1 a una condizione Pe2 e Qe2.
E 02
, Xs è un dato di targa, si può ricavare la E 02 .
Xs
Dalla caratteristica a vuoto determino la corrente di eccitazione I ecc 2 che mi genera la E 02 .
Supponiamo di conoscere
L’espressione della coppia meccanica è
Tm 2 =
ms pE 0U
senθ 2
ηX s ω s
1424
3
cos tan te
caratteristica di coppia meccanica:
28
ipotizzando di conoscere la
Se conosciamo il valore massimo Tˆm e l'angolo θ 2 si può immediatamente trovare il valore di coppia
meccanica che deve essere applicata alla nostra macchina per erogare la Pe2 e la Qe2.
E0
e tramite l'equazione di coppia,
jX s
permette di ottenere l'angolo θ e la coppia meccanica da applicare per erogare la potenza da noi
voluta.
Non è possibile far lavorare la macchina in tutti i punti del piano, infatti la macchina presenta dei
limiti di funzionamento che non possono essere superati.
Limiti della macchina
1. Massimo angolo di carico.
2. Massima corrente ammissibile negli avvolgimenti rotorici.
3. Massima corrente ammissibile negli avvolgimenti statorici.
4. Massima coppia sopportabile dall’asse del rotore.
Studiamo quindi quali sono i punti di stabilità e di instabilità della macchina, definendo quale è il
massimo angolo di carico che può essere assunto della macchina.
Ipotizziamo di voler passare in una condizione di funzionamento caratterizzata da un angolo θ 1 a
una condizione caratterizzata da un angolo θ 2 e verificare che questa sia una condizione di
equilibrio stabile oppure instabile.
Quindi qualunque punto del piano viene individuato dal vettore
Per analizzare questo sistema ragioniamo a corrente di eccitazione costante, questo ci porta a dire che
anche E0 =cost, successivamente andiamo a verificare la stabilità aumentando valore dell'angolo θ .
Partiamo da una condizione iniziale in cui il sistema è in equilibrio
j
dω m
= Te (0 − ) + Tm (0 − )
dt
siamo al sincronismo, ω m è costante, allora
Te (0 − ) = −Tm (0 − )
nell’istante successivo applichiamo una variazione positiva di coppia meccanica, quindi nell'istante
successivo Tm sarà pari a Tm (0 + ) = Tm (0 − ) + ∆Tm andando a sostituire avremo
j
dω m
= ∆Tm
dt
la macchina passa a una condizione di ipersincronismo, questo vuol dire che il
vettore E0 ha una pulsazione maggiore rispetto al
vettore U di conseguenza l'angolo θ aumenta. La
coppia elettromagnetica all'aumentare di θ varia
il suo valore, la caratteristica di coppia sarà
(ragionando in moduli e non di segni)
29
Si vede che se aumenta θ , sino ad un valore non superiore a π , allora aumenta Te, arrivando al
2
valore di θ 2 avremo che la coppia elettromagnetica della coppia meccanica sono uguali perché
l’incremento della coppia meccanica viene bilanciato da un incremento di coppia elettromagnetica.
dω m
Te = Te (0 − ) + ∆Te ⇒ j
= ∆Tm − ∆Te la macchina torna quindi alla condizione di sincronismo e
dt
in una condizione di equilibrio meccanico. Questa condizione sarà sicuramente una condizione di
equilibrio stabile.
Analizziamo ora il punto simmetrico rispetto al valore θ 2 cioè per valori θ >
π
2
Ipotizziamo di applicare una coppia di carico, la macchina diventa ipersincrona e aumenta il valore
di θ , ma all'aumento di θ non corrisponde più un aumento di Te ma una diminuzione, quindi il
differenziale tra la coppia elettromagnetica e la coppia meccanica tende ad aumentare
dω m
j
= ∆Tm + ∆Te , la macchina allora accelera, si dice che la macchina “perde il passo” la
dt
macchina in questa condizione non riesce più a tornare in una condizione di equilibrio, quindi siamo
in una condizione di funzionamento instabile.
Possiamo dividere il piano delle potenze in due parti, una parte dove −
π
π
in cui tutti i punti
2
2
sono dei punti di funzionamento stabili, gli altri punti sono di funzionamento instabile in cui la
macchina a seguito di una variazione di coppia perde le caratteristiche di sincronismo.
30
<θ <
Se lavoriamo sul limite di stabilità, basta una piccola variazione di coppia per portare la macchina in
una zona di funzionamento instabile dove non si ha più una coppia elettromagnetica che riesce a
compensare la variazione di coppia meccanica. Quindi questa condizione è un limite teorico, nella
pratica si sceglie una condizione limite che risulta essere leggermente inferiore rispetto alla
condizione teorica e che assicura alla macchina di funzionare sempre in una condizione di stabilità.
Dovremo quindi definire il limite pratico di stabilita, definendo una variazione ammissibile di coppia
( ∆C ) per ogni condizione di eccitazione (esempio: la coppia può variare ± 1% rispetto la coppia
nominale). Si ha quindi un range di possibile variazione nella condizione di stabilità.
Graficamente si avrà:
( commento alla costruzione del grafico )
31
Partiamo da una circonferenza relativa a un valore
E 01
di eccitazione pari a
su questa rintracciamo il
jX s
punto a coppia massima (punto A) decrementiamo
questo valore di coppia di una quantità ∆C ,
riportiamo questo valore sulla circonferenza
E 01
relativa a
troveremo il primo punto del limine
jX s
pratico di stabilità (punto B). Spostiamoci su
un’altra circonferenza, questa volta relativa a un
E02
valore di eccitazione
su questa circonferenza
jX s
rintracciamo il punto a coppia massima (punto C)
da questo valore di coppia sottraiamo il ∆C
ammissibile riportando questo risultato sulla
E02
circonferenza avente raggio
, troviamo il
jX s
secondo punto del limite pratico di stabilità (punto D). Ripetiamo la stessa costruzione per tutte le
altre circonferenze a diverso valore di corrente di eccitazione.
Altri limiti di funzionamento sono in funzione delle dimensioni degli avvolgimenti di statore e di
rotore e del tipo di ventilazione della macchina che permettono hai due avvolgimenti, di rotore e di
statore, di sopportare determinata correnti. Superare i limiti di corrente rotorica e statorica potrebbe
portare a un surriscaldamento degli avvolgimenti che potrebbe rovinare l’isolamento o deformare gli
stessi. Andiamo quindi a trovare, nel piano delle potenze, quali sono i punti di massima corrente
rotorica e statorica sopportabile.
Partiamo dal definire i punti di massima corrente
ammissibile negli avvolgimenti statorici, la procedura
è molto semplice, una volta definito il massimo
valore di corrente che può circolare negli
si traccia una
avvolgimenti di statore Ismax
circonferenza prendendo come raggio la Ismax. I punti
interni a questa circonferenza sono dei punti di
funzionamento sicuri, uscendo fuori dai limiti si
rischia di distruggere gli avvolgimenti di statore.
32
Per quanto riguarda la massima corrente ammissibile al
rotore sappiamo che a una corrente di eccitazione massima
sarà associato un valore massimo di tensione di tensione
indotta a vuoto, il procedimento da adottare per ricavare i
punti di funzionamento sicuri è uguale a quello visto
precedentemente con la sola differenza che la circonferenza
E 0 MAX
avrà come raggio il valore
jX s
L’ultima
situazione che può portare a dei limiti di funzionamento
è la coppia massima che può essere applicata all’asse
del rotore. Sappiamo che con macchina in
funzionamento da generatore dobbiamo fornire una
certa potenza meccanica all’asse perché si abbia una
erogazione di potenza elettrica, questa potenza all’asse
della nostra macchina viene fornita da un motore primo
che, naturalmente, può trasferire potenza sino a un certo
limite oltre il quale il motore primo non può andare.
Questo limita la potenza all’asse e quindi le potenza
elettrica erogabile. Dobbiamo considerare che l’asse del
rotore è sottoposto a degli sforzi di torsione, quindi i
limiti di potenza, sia da funzionamento da generatore
che da motore, possono essere imposti dalla resistenza
del materiale usato nella costruzione dell’asse.
Abbiamo quindi una retta che delimita la massima
potenza applicabile.
Abbiamo quattro zone, la prima è data dal limite pratico di stabilità, la seconda è data dalla
condizione di massima corrente di statore, la terza è dalla condizione di massima corrente di
eccitazione e l’ultima è la massima coppia applicabile all’asse. La zona di funzionamento è data
dall'intersezione di queste quattro zone, per semplicità rappresentiamo solo la parte superiore del
diagramma.
33
Funzionamento in corto
Lo studio della macchina in corto viene fatto per ricavare la caratteristica in corto circuito. La
macchina, tramite un motore primo, viene portata alla velocità di sincronismo, la corrente di
eccitazione è nulla e i morsetti di statore vengono cortocircuitati (l’impedenza di corto è molto
minore dell’impedenza di dispersione) in queste condizioni viene variata la corrente di eccitazione e
misurata la corrente di cortocircuito, che viene fatta variare sino al massimo valore di sicurezza.
La corrente di statore, in funzione della corrente di
eccitazione,
viene riportata per punti ottenendo così la caratteristica in
cortocircuito della macchina sincrona.
Se andiamo ad analizzare il funzionamento della macchina
in
condizioni di funzionamento a vuoto (curva occ) e in
cortocircuito (curva scc), a parità di corrente di eccitazione,
noteremo che le tipologie di funzionamento sono molto
diverse, infatti in cortocircuito la caratteristica rimane
lineare
anche quando a vuoto la corrente di eccitazione porta la
macchina in saturazione.
Questo fatto può essere messo in luce analizzando l’equazione di equilibrio elettrico Eo = jX s Is + U
essendo in una condizione di cortocircuito la macchina presenta una tensione U=0 infatti i morsetti
di statore sono cortocircuitati. Quindi Eo = jX s I s dividendo i termini di dispersione e di reazione
d’armatura si arriva a scrivere Eo = jX ds I s + jX t I s Rappresentiamo graficamente questa relazione.
34
Si può vedere che la E0 è bilanciata dalle cadute di tensione d’armatura e di dispersione, questo fa in
modo che la corrente sia in quadratura e in ritardo rispetto alla tensione.
Lo studio delle correnti ci permette di vedere com’è costituito il campo al traferro. La corrente di
eccitazione è in opposizione di fase rispetto alla corrente di statore, queste correnti daranno origine a
dei campi magnetici che sono tra loro in opposizione di fase. La differenza tra questi due campi è il
campo magnetico a traferro, questo risulta essere molto più piccolo, infatti aumentando la corrente di
eccitazione aumenta la corrente di reazione questo fa in modo che il campo al traferro sia sempre
piccolo e genera una tensione che deve solamente bilanciare la caduta di tensione di dispersione.
Perciò siamo lontani dalle condizioni di funzionamento in saturazione, anche per correnti di
eccitazione molto elevate ecco perché la caratteristica in cortocircuito è lineare.
Bδ campo presente al traferro, produce la
tensione indotta sulla macchina che
controbilancia la caduta di tensione
sull'impedenza di dispersione.
Dato che il Bδ è molto piccolo anche
aumentando la Iecc non si arriva alla
saturazione, ci si arriva
solo se la corrente di eccitazione è estremamente elevata.
E0
= X s (Iscc corrente di corto a parità della corrente di
I s cc
eccitazione) trovando la reattanza della macchina in qualsiasi punto di funzionamento.
Naturalmente si deve ipotizzare che la macchina non sia satura e che la sua curva di magnetizzazione
sia una retta passante per l’origine e per il punto di lavoro.
Se prendiamo come esempio il funzionamento della
macchina a tensione nominale, dobbiamo approssimare
la caratteristica magnetica con la retta Op. Secondo
questa approssimazione, il valore saturo della reattanza
V
sincrona a tensione nominale è Xs = t
I s( f 1 )
Potremmo quindi dire che E 0 = jX s I s ⇒
Dove Is(f1) è la corrente d’armatura O’c letta dalla
caratteristica di cortocircuito alla corrente di eccitazione
Of’ corrispondente a Vt sulla caratteristica a vuoto.
Questo modo di tener conto degli effetti della
saturazione da generalmente risultati soddisfacenti
quando non è richiesta una grande precisione. Questa
relazione può essere applicata solo per ricavare i moduli
delle nostre grandezze, ma porta a degli errori per quanto riguarda gli sfasamenti, non è quindi un
sistema di studio preciso ma approssimato.
Se andiamo a eseguire il rapporto per tutti i valori di E0 e la rispettiva corrente vediamo che la
reattanza presenta tre zone.
Disegno 1
Zona di funzionamento lineare, dove la reattanza prende il nome di reattanza sincrona al traferro o
linearizzata.
Zona di transizione.
Zona di funzionamento in saturazione, dove si ha la reattanza sincrona in saturazione.
35
Nei dati di targa della macchina troviamo il valore di reattanza relativo al funzionamento nominale
Vn
1
X ss =
(Vn tensione nominale; Icc(K ) corrente di cortocircuito relativo alle condizioni
1
I cc ( K )
nominali).
Nei dati di targa spesso questo valore è espresso in modo implicito tramite un parametro chiamato
SCR (rapporto di cortocircuito) vediamo a cosa è pari questo parametro
Z
V I (K 1 )
1
SCR = p .u . = b = n cc
X ss I n Vn
X ss
Questo è anche pari a SCR =
I cc ( K 1 ) K 1
= 2 dove K1 e K2 sono le correnti di eccitazione associate
In
K
1
alle rispettive correnti Icc(K ) e In, visto che la caratteristica è lineare il rapporto tra le correnti è
uguale.
Disegno 2
Questo valore di reattanza ci definisce la macchina nel solo punto di funzionamento lineare, quindi
questo studio può essere applicato solo puntualmente, ricordando che è uno studio approssimato.
Funzionamento in saturazione
Per ora abbiamo studiato la macchina elettrica sincrona in una condizione di linearità, questa è una
condizione di funzionamento che non rispecchia il funzionamento reale della macchina, infatti la
macchina sincrona viene fatta funzionare in un punto prossimo alla saturazione. Questo fatto ci fa
capire che lo studio della machina in regime lineare non è più valido ma dobbiamo trovare un
metodo valido per lo studio della macchina in saturazione.
Vengono fatte generalmente due ipotesi, che riguardano principalmente i flussi di dispersione:
1. La reattanza di dispersione d’armatura viene ritenuta costante e indipendente dalla
saturazione. I flussi dispersi sono in aria per una considerevole porzione dei loro percorsi,
cosicché sono influenzati relativamente poco dalla saturazione.
2. Si ipotizza che la saturazione sia determinata dal flusso risultante a traferro e che la f.m.m.
risultante corrispondente ad un dato valore di flusso al traferro sia la stessa a vuoto e a
carico. La caratteristica a vuoto si può allora interpretare come la relazione tra la tensione al
traferro e la f.m.m. prodotta dall’eccitazione e dalla reazione d’armatura. Questa ipotesi
trascura gli effetti del flusso disperso, trascurare questi effetti non è un fatto grave perché i
flussi dispersi sono generalmente piccoli ed i loro percorsi coincidono solo in parte con
quello del flusso principale. Per questo motivo la caratteristica a vuoto della macchina
sincrona può essere usata anche per descrivere il comportamento a carico della macchina
senza commettere un grosso errore.
Caratteristica a fattore di potenza zero e triangolo di Potier
Partiamo dalla condizione più semplice di studio, che è anche un caso di notevole importanza teorica,
in cui le cadute di f.m.m. sono disposte lungo la stessa retta d’azione, quindi
cosϕ = 0 ; I s = I a = cost in questo caso la somma vettoriale si riporta alla sola somma scalare. Da
questo studio si ottiene una caratteristica fondamentale chiamata caratteristica a fattore di potenza
zero U=f(Iecc), (permette di ricavare il triangolo di Potier), questa viene riportata insieme alla
caratteristica a vuoto e in cortocircuito della macchina. Andiamo quindi a ricavare questo
diagramma.
Il primo punto lo si trova per un valore nullo di tensione hai morsetti della macchina U=0 (punto C)
in questa condizione la macchina è cortocircuitata, quindi Eo = jX s I s cc la corrente di statore Ia=Iscc
entrando nella caratteristica in cortocircuito scc riusciamo a trovare la corrente di eccitazione Iecc
(segmento OC) e quindi il punto di partenza C. Conviene porci nel caso più generale possibile quindi
36
non ci riferiamo all’equazione Eo = jX s I s + U ma all’equazione E = E 0 + E a = jX d I a + U si vede
che non si parla più di reattanza sincrona infatti la parte relativa alla reazione d’armatura è compresa
nella E che è la tensione complessivamente indotta. Questo perché si deve studiare la macchina in
regime non lineare quindi non sappiamo come varia la corrente d’armatura con la tensione indotta
dalla reazione d’armatura, mentre la reattanza di dispersione è comunque costante perché i flussi
hanno una evoluzione in aria. Nel nostro caso di partenza U=0 quindi E = E 0 + E a = jX d I a dato che,
Xd e Ia per ipotesi sono noti, conosciamo anche il valore della tensione complessivamente indotta E
(segmento BA).
Tramite il diagramma a vuoto ricaviamo la
corrente di eccitazione questo ci fornisce un
altro punto (punto A). Sappiamo che la
reattanza di dispersione è costante (Xd=cost) e
che per ipotesi lo è anche la corrente di statore
(Ia=cost) questo ci fa capire che anche la
tensione complessivamente indotta è una
costante E = jX d I a =cost il triangolo ABC
rimane costante e variando la corrente di
eccitazione questo trasla rigidamente, infatti il
punto B percorre tutta la caratteristica a vuoto
mentre il punto C mi disegna la caratteristica a
fattore di potenza zero. Questo triangolo viene
chiamato triangolo di Potier.
Questo è il modo canonico di costruire il diagramma, ma generalmente si usa un altro metodo, anche
perché non sempre si è in
possesso di tutti i dati di
cui si è ipotizzato avere.
La costruzione geometrica
per trovare il triangolo
abc è la seguente: si
scelga un punto c sulla
caratteristica a fattore di
potenza zero sopra il
ginocchio della curva. Si
tracci
il
segmento
orizzontale cd uguale in
lunghezza alla corrente di
eccitazione
c’O
in
cortocircuito. Per il punto
d si tracci la retta da
parallela alla caratteristica
al traferro, che interseca la
caratteristica a vuoto in a.
Si tracci la retta verticale
ab. Il triangolo abc è il
triangolo di Potier.
La tensione rappresentata dal segmento ab è nota come caduta di tensione nella reattanza di Potier
Xp =
caduta di tensione ab per fase
corrente di armatura per fase a fattore di potenza zero
37
Nella figura si nota che sono presenti due caratteristiche a vuoto, la caratteristica a vuoto tratteggiata
è quella tiene conto del comportamento dei flussi dispersi. Si può quindi dire che, con le nostre
ipotesi, la reattanza di dispersione è uguale alla reattanza di Potier Xd=Xp. Fisicamente la reattanza di
Potier non ha nulla a che fare con la reattanza sincrona o la reattanza di dispersione o quella satura è
un parametro che si utilizza per lo sviluppo dei metodi di calcolo approssimati che permettono di
studiare la macchina in modo lineare anche se sta funzionando in saturazione con un qualsiasi fattore
di potenza.
Macchine sincrone sature
Metodo delle sovrapposizione delle cause (metodo di risoluzione rigoroso)
Per uno studio esaustivo della macchina sincrona conviene basarci sulla sovrapposizione delle cause
valida anche in regime di saturazione al contrario della sovrapposizione degli effetti valida solo in
regime lineare. In regime di non linearità le cadute di f.m.m. non risentono delle non linearità del
materiale, ma dipendono solo dalle correnti, in più prese due cadute f.m.m. la loro somma ci da
sempre una caduta di f.m.m. risultante, questo ci fa capire che le cadute di f.m.m. sono proprio le
cause associate al nostro sistema.
Vogliamo ricavare la tensione indotta a vuoto E0 e la corrente di eccitazione partendo da una
condizione funzionamento generico sotto carico in cui abbiamo misurato la tensione ai morsetti in
uscita dalla macchina e la corrente di statore, sappiamo inoltre che la macchina funziona in
saturazione.
Dai dati disponibili possiamo ricavare la tensione complessivamente indotta E = jX d I a + U , questa
tensione è indotta da un flusso in quadratura con la E e prodotto da un campo magnetico risultante
dal campo di eccitazione e di reazione. Conoscendo la caratteristica a vuoto che mi lega le cause
(corrente) agli effetti (tensioni indotte) entrando nel diagramma con il valore della E ricaviamo la
Iδecc. Infatti la tensione complessivamente indotta è generata dal campo complessivo a traferro dato
da una f.m.m. complessiva, somma della f.m.m. di eccitazione e di reazione, a cui è associata la
corrente Iδ questa è in fase con il flusso che mi induce la tensione e in fase e pari alla Iδecc riportata
allo statore come già visto nella parte generale. Applicando la sovrapposizione delle cause, la f.m.m.
al traferro è la somma della f.m.m. di reazione e della f.m.m. di eccitazione, quindi in termini di
corrente I δ = I a + I r1 da cui si ricava I r1 = I δ − I a questa è la corrente presente al rotore riportata
allo statore come già visto nella parte generale.
Grafico correnti 1
Dato che conosciamo la I r1 riportandola al rotore abbiamo il valore dalla corrente di eccitazione Iecc
che mi genera la tensione a vuoto. Entrando nella caratteristica a vuoto, con il valore della Iecc,
troviamo la E0 conosciuta sia in modulo che in fase, perché risulta essere in quadratura con la I r1 .
Disegno caratteristica
Come si vede dalla caratteristica della macchina, la differenza tra la tensione U e E mi da la caduta
di tensione associata alla reattanza di dispersione o di Potier. La differenza tra la U e la E0 mi da la
sovratensione generata dal passaggio da un funzionamento a carico al funzionamento a vuoto.
Ipotizziamo che per un qualche fenomeno si sia verificato un cortocircuito all'interno della macchina,
la tensione U è pari a zero. La corrente di eccitazione presente all'interno dalla macchina a causa dei
sistemi di autoregolazione, è stata aumentata per sopperire alla mancanza di tensione in uscita
38
L'interruttore sulla macchina tende ad aprirsi, quindi si ha il passaggio da una tensione U alla
tensione E0, se noi avessimo una macchina con comportamento lineare, ci troveremo ad avere un
livello di tensione molto superiore a quello nominale. Invece la macchina presentando fenomeni di
saturazione l'eventuali sovratensioni della macchina vengono limitate. Da questo si può vedere che la
macchina non può essere fatta funzionare in condizioni lineari, ma per salvaguardare la rete in caso
di sovratensioni, dovute a cortocircuiti, bisogna lavorare
in prossimità della saturazione.
Reattanza sincrona satura e fattore di saturazione
Gli effetti della saturazione a carico possono essere tenuti
in conto con buona precisione usando un fattore di
saturazione determinato dalla caratteristica a vuoto.
Questa teoria è valida per le macchine a rotore liscio,
esso è frequentemente applicato in via di
approssimazione alle macchine a poli salienti, con
risultati soddisfacenti nel campo di funzionamento
normale.
In base alle nostre ipotesi le condizioni nel circuito
magnetico sono determinate dalla tensione al traferro E
sarebbe il valore Rag letto sulla caratteristica al traferro.
Il grado di saturazione può essere descritto in termini di
R
un fattore di saturazione k definito come k =
Rag
Si può dimostrare con semplici proporzioni che k vale anche k =
E r ( ag )
E
Dove Er(ag) è la tensione corrispondente alla f.m.m. risultante R letta alla caratteristica al traferro.
A noi interessa trovare la tensione indotta a vuoto E0 sappiamo che senza la saturazione , la tensione
a vuoto sarebbe uguale alla tensione Ef(ag) letta dalla caratteristica al traferro corrispondente alla
f.m.m. di eccitazione F. A causa degli effetti della saturazione, la riluttanza del circuito magnetico è
k volte il suo valore non saturo e i flussi componenti sono ridotti a 1/k volte il loro valore non saturo.
E f ( ag )
In condizioni sature la tensione a vuoto E0 è pertanto Eo =
k
Questo metodo ci ha permesso di linearizzare il comportamento della macchina in regime di
saturazione, sicuramente è un metodo molto più veloce, ma meno preciso, rispetto al precedente.
Metodo ANSI
Questo metodo consiste nel trattare la macchina come non satura e nell’aggiungere poi una
componente addizionale di eccitazione per tener conto della saturazione.
39
40
Macchina sincrona a poli salienti
Generalità
La macchina a poli salienti non presenta più un rotore cilindrico ma è costituita da un nucleo dove si
fissano, mediante procedure meccaniche, dei gambi polari, il loro numero è sempre pari e sono
uguali al numero dei poli. Sui gambi polari si realizzano gli avvolgimenti, questi sono non più
distribuiti ma concentrati e collegati in serie, in modo tale da realizzare alternativamente un polo
nord e un sud. I gambi vengono chiusi dalle espansioni polari, queste consentono di realizzare un
vero e proprio polo, quindi per la legge di solenoidalità del campo magnetico le linee di flusso
uscenti devono essere uguali alle linee entranti allora è impossibile che esista un monopolo
magnetico, quindi si avrà sempre un numero di poli multiplo di due. Tutto questo costituisce il rotore
della macchina asincrona a poli salienti. Lo statore è uguale a quello visto per la macchina sincrona a
poli lisci.
La struttura come si vede è anisotropa, quindi la coppia non è data solo dall’interazione del campo di
armatura e del campo di eccitazione ma avremo anche una coppia di riluttanza
dL
i 2 dLrr e come visto per le macchine monofasi l’unico modo per creare una coppia
T = isir rs + r
dξ
2 dξ
costante nel tempo era rispettare le condizioni di sincronismo. Tramite la teoria della doppia reazione
riusciamo a riportarci a una macchina a poli lisci.
Funzionamento a vuoto
Eccitiamo la macchina e la portiamo alla velocità di sincronismo, studiamo ora il modello
elettromagnetico della macchina, come al solito linearizziamo la macchina, individuiamo due assi
uno divide in due le espansioni polari (asse polare) e un altro si pone in mezzo hai due poli (asse
interpolare) si vede che pur essendo una macchina anisotropa la macchina presenta delle
caratteristiche di simmetria geometrico, sia rispetto all’asse polare che all’asse interpolare, che ci
porterà a delle simmetrie dal punto di vista magnetico.
1
Analizziamo una generica linea di flusso, si nota che le linee di flusso non presentano un andamento
radiale ma seguono un percorso a minima riluttanza, il tubo di flusso non può essere considerato
costante (questo si può capire vista la differenza tra la superficie del polo e quella di statore),
l’induzione all’interno del traferro è quindi funzione sia della posizione che della f.m.m. quindi per
ogni punto abbiamo un valore di campo differente. Si deve capire che noi non vogliamo studiare il
campo in tutti gli infiniti punti, ma solo dove avvengono gli scambi energetici, quindi studiamo il
campo solo sulla superficie di statore (superficie Σ).
Andiamo a calcolare il campo in questa situazione B = ∆F µ 0 dove la quantità λ (β ) = µ 0 viene
δ
δ
chiamata permeanza specifica. Dato che δ è la grandezza del traferro, possiamo affermare che la
permeanza specifica è una quantità variabile e vista la differenza tra le superfici di statore e rotore
anche la ∆F avrà un andamento particolare. Vediamo come variano queste grandezze.
Per la permeanza si vede che più è piccolo il traferro più e grande il valore di permeanza e viceversa,
quindi in corrispondenza degli assi
interpolari la permeanza è minima mentre
in corrispondenza degli assi polari è
massima, il suo valore resta comunque
positivo. Se sagomiamo bene i poli
possiamo ritenere che la permeanza
assuma una forma sinusoidale e che oscilli
attorno a un valor medio. Se prendiamo
l’asse interpolare come riferimento
possiamo dire che λ (β ) = λ − λ cos 2 pβ
0
1
dove il valor medio è pari a
λ +λ
λ −λ
λ0 = max min mentre λ1 = max min
2
2
Per la ∆F vista la forma d’onda possiamo
r
approssimarla a una sinusoide
∆FrΣ = ∆Fˆr sin pβ
Abbiamo tutti gli elementi per calcolare il campo magnetico sulla superficie che si affaccia allo
statore
BrΣ = λ0∆Fˆr sin pβ − λ1∆Fˆr sin pβ cos 2 pβ
Dividendo l’equazione tramite Werner si ottiene:
λ
λ
λ
BrΣ = λ0∆Fˆr sin pβ − 1 ∆Fˆr sin 3 pβ − sin pβ =0 ∆Fˆr sin pβ − 1 ∆Fˆ sin 3 pβ + 1 ∆Fˆ sin pβ
2
2
2
[
2
]
Si arriva a:
λ
λ
BrΣ = λ0 + 1 ∆Fˆr sin pβ − 1 ∆Fˆr sin 3 pβ
2
2
Si nota la presenza di una terza armonica di spazio sin 3β (termine prodotto dalla permeanza con
pulsazione 2β ). Questo termine di terza armonica concatenandosi con gli avvolgimenti di statore
generano delle tensioni indotte di tipo omopolari e quindi fanno circolare delle correnti omopolari
che producono un campo magnetico. Ma in un sistema trifase i campi magnetici di tipo omopolari
sono pari a zero, quindi per questo campo non esiste un campo di reazione, in più ha un valore molto
piccolo che distorce molto poco il campo il campo del rotore.
Quindi utilizzando espansioni polari e f.m.m. concentrate riusciamo ad ottenere un campo magnetico
a traferro uguale a quello trovato per le macchine con avvolgimenti distribuiti, otteniamo ancora un
campo d’induzione a traferro sulla superficie di statore di tipo sinusoidale
λ
BrΣ = λ0 + 1 ∆Fˆr sin pβ
2
Questo ci fa capire che il comportamento a vuoto, di questa macchina, è uguale a quello di macchina
sincrona a poli lisci.
Il diagramma delle grandezze sarà identico alla macchina sincrona a poli lisci e anche per le
macchine a poli salienti possiamo definire una caratteristica a vuoto simile alle macchine a poli lisci.
E0
I ecc
Φ ecc
I ecc
E0
Il vantaggio è che la distribuzione di B è legata solo alla forma delle espansioni polari, quindi
moltiplicando le espansioni polari si ottengono molti più poli rispetto a una macchina a poli lisci. È
impossibile con macchine a poli lisci ottenere lo stesso numero di poli di una macchina a poli
salienti, infatti in una macchina a poli lisci troppi poli portano alla rottura della dentatura delle cave.
Un numero di poli elevato è fondamentale per le macchine collegate a delle turbine lente, come le
turbine idrauliche Kaplan e Pelton, caratterizzate da una velocità meccanica bassa. Sappiamo che la
ω quindi un
frequenza di rete è fissa e che per la condizione di sincronismo si deve avere
ωm = s
p
numero di poli elevato, nel caso di una bassa velocità meccanica, è fondamentale affinché si possa
rispettare la condizione di sincronismo. Le macchine sincrone a poli salienti vengono usate sempre
più spesso anche nell’eolico.
Funzionamento a carico
Applicando un carico alla macchina andrà a circolare una corrente Is allo statore, che per ipotesi sarà
sfasata di ε rispetto alla tensione a vuoto e di ε + π rispetto alla corrente di rotore.
2
3
Andando a tracciare gli andamenti delle cadute di f.m.m. sia per l’eccitazione che per la reazione
d’armatura si vede che al variare di ε la caduta di
f.m.m. prodotta dalla reazione d’armatura vede un
circuito magnetico sempre diverso questo perché
abbiamo una macchina anisotropa, abbiamo quindi
una permeanza variabile che porta a una tensione
indotta variabile. Per questo motivo non possiamo,
come fatto per le macchine sincrone a poli lisci,
usare la sovrapposizione degli effetti, dobbiamo
trovare un altro metodo di studio.
Teoria della doppia reazione
Partiamo dalla definizione del campo di reazione d’armatura B = ∆F (β )λ (β )
s
s
Siamo già a coscienza dell’espressione della caduta di f.m.m. generata da un sistema trifase, quindi
prendendo coma riferimento la caduta di f.m.m. di eccitazione otteniamo:
3
∆Fs (β ) = ∆Fˆs cos( pβ + ε )
2
Conosciamo anche l’espressione della permeanza λ (β ) = λ − λ cos 2 pβ andando a sostituire si
0
1
ottiene:
Bs (β ) =
3 4 ns 2
I s cos( pβ + ε ) (λ0 − λ1 cos 2 pβ ) = Bˆsλ0 cos( pβ + ε ) − Bˆsλ1 cos(2 pβ ) cos( pβ + ε )
2
2
π
14243
Bˆ s
Tramite
Werner
possiamo
λ
Bˆsλ1 cos(2 pβ ) cos( pβ + ε ) = Bˆs 1 [cos(− pβ +ε ) + cos(3 pβ +ε )]
2
consideriamo nullo il termine di terza armonica cos(3 pβ + ε )
4
dire
che
Dato che cos(−β ) = cos β allora Bˆ (β ) = Bˆ λ cos( pβ + ε ) + Bˆ λ1 cos( pβ − ε )
s
s 0
s
dalle relazioni
2
trigonometriche
λ
Bˆs (β ) = Bˆsλ0[cos pβ cos ε −sin pβ sin ε ]− Bˆs 1 [cos pβ cos ε + sin pβ sin ε ]
2
ordinando
l’equazione
λ
λ
Bˆs (β ) = Bˆs λ0 − 1 cos ε cos pβ − Bˆs λ0 + 1 sin ε sin pβ
2
2
esplicitando il valore del campo
λ 3 4 ns 2
λ 3 4 ns 2
Bˆs (β ) = λ0 − 1
I s cosε cos pβ − λ0 + 1
I sin ε sin pβ
2 2π 2
2 2π 2 s
Il campo magnetico prodotto dalla reazione d’armatura è dato dalla somma di due campi sinusoidali,
λ1
e un altro in
un primo campo in quadratura col campo di eccitazione ˆ
Bs λ0 − cosε cos pβ
2
λ
opposizione col campo di eccitazione ˆ
Bs λ0 + 1 sin ε sin pβ
2
L’ampiezza dei due campi è legata alla proiezione della corrente sull’asse diretto e su quello in
quadratura, le due f.m.m. sviluppate sono pesate tramite due coefficienti che dipendono strettamente
dalla permeanza vista dal circuito magnetico, coefficiente trasversale associato al campo che sta
sull’asse interpolare, coefficiente longitudinale tiene conto che il circuito vede la massima riluttanza
qualsiasi sia la posizione dei campi di eccitazione e di reazione.
Il campo magnetico di reazione può essere visto come la somma di due campi prodotti dalle
proiezioni di f.m.m. pesate per i rispettivi coefficienti, quindi a qualsiasi caduta di f.m.m. allo statore
associamo le sue due componenti, moltiplicate per i rispettivi coefficienti, che ci rappresentano
l’effettivo comportamento della caduta di f.m.m. allo statore. Siamo riusciti, tramite la teoria della
doppia reazione, a studiare un sistema non lineare come se fosse un sistema lineare.
Equazione di equilibrio elettrico della macchina sincrona a poli salienti
Grazie a questa teoria riusciamo, tramite la corrente di statore e alla conoscenza del campo prodotto a
ricavare i flussi e quindi le rispettive tensioni indotte, in poche parole possiamo studiare la macchina
a poli salienti come una macchina a poli lisci. Al traferro sarà presente una tensione indotta E0, legata
al campo di eccitazione e due tensioni indotte legate al campo di reazione d’armatura, la tensione
indotta longitudinale El e la tensione indotta trasversale Et. La tensione complessivamente indotta a
traferro sarà pari a: E = E + E + E ricordando che, come per le macchine a poli lisci, allo statore
0
l
t
abbiamo dei flussi dispersi e che la resistenza degli avvolgimenti può essere trascurata, arriviamo a
scrivere l’equazione di equilibrio elettrico per le macchine a poli salienti
E = E0 + El + Et = jX d I a + U
Come si può vedere l’espressione è uguale a quella ricavata in precedenza per le macchine sincrone a
poli lisci.
Tracciamo il diagramma delle nostre grandezze elettriche.
5
( commento alla costruzione del grafico )
Partiamo sempre dalla corrente di eccitazione Iecc fittizia a cui è associato il flusso di eccitazione,
questo flusso mi induce una tensione indotta a vuoto che è la nostra tensione E0. Conosciamo il
valore della corrente Is; della corrente Is possiamo determinare la componente trasversale It e la
componente longitudinale Il, ad ognuna di queste componenti è associato un flusso.
Se è noto il Φt è nota la tensione indotta di tipo trasversale perché sarà in ritardo di 90 gradi
rispetto al flusso. Stesso discorso potremo fare per il flusso longitudinale Φl a cui è legata una
tensione indotta longitudinale. A questo punto il calcolo è immediato perché per ricavare la tensione
complessivamente indotta basterà sommare alla tensione indotta E0 la tensione indotta Et e la
tensione indotta El, la tensione risultante sarà la tensione E.
Se è nota la tensione E basta semplicemente calcolare la caduta di tensione sull'impedenza di
dispersione Zd per avere un'indicazione di quella che è la tensione U.
Ipotizzando di trascurare la resistenza degli avvolgimenti statorici, di solito è molto piccola perché
le macchine sono utilizzate principalmente come macchine generatrici, avremo che il termine Zd è
essenzialmente un termine di tipo reattivo, quindi è pari a: Z d = JX d
Abbiamo così ottenuto un diagramma vettoriale rappresentativo del funzionamento della macchina
elettrica sincrona poli salienti.
Questo diagramma tiene conto delle tensioni indotte; in generale preferiamo non lavorare con
tensioni indotte, ma lavorare con le cadute di tensione quindi esprimere le tensioni indotte dalla
componente trasversale e dalla componente longitudinale in funzione delle correnti longitudinali e
delle correnti trasversali. Preferiamo utilizzare una rappresentazione che è quella in termini di
corrente.
Andiamo quindi ad esprimere i termini di tensione indotta tramite le rispettive correnti. Nominiamo i
λ1
λ1
coefficienti, longitudinale e trasversale, come:
Ct = λ0 − ; Cl = λ0 +
2
2
Incominciamo con la tensione indotta longitudinale, sappiamo che per la legge di Lenz la tensione
indotta di tipo longitudinale è pari a: El = − Jωλl
Sappiamo anche che il flusso longitudinale è legato direttamente alla corrente che produce il campo
ad esso associato, infatti il flusso longitudinale sarà esattamente pari ad un coefficiente di
autoinduzione moltiplicato il valore della corrente longitudinale λl = L ⋅ I l
6
Il coefficiente di autoinduzione è abbastanza semplice da ricavare, infatti abbiamo visto che il valore
di Bmax, funzione di Il , era pari al valore di Bmax relativo alla corrente Is moltiplicato per un
coefficiente di reazione longitudinale, quindi il coefficiente di autoinduzione non sarà nient'altro che:
λl = L ⋅ I l = Lt ⋅ Cl ⋅ I l
Il coefficiente di autoinduzione al traferro l'abbiamo definito per una macchina elettrica sincrona a
poli lisci nella quale il traferro è costante. In questo caso è il coefficiente di autoinduzione al traferro
relativo alla macchina elettrica sincrona poli lisci che presenta un traferro esattamente uguale al
traferro minimo della macchina elettrica sincrona a poli salienti.
δ
δmin
Se questa è la rappresentazione della scarpa polare, abbiamo che il traferro geometrico della
macchina è funzione della ascissa curvilinea, il coefficiente al traferro che compare in questa
relazione è il coefficiente al traferro relativo alla macchina elettrica sincrona a poli lisci che presenta
un traferro pari al traferro minimo. È il coefficiente longitudinale Cl che tiene conto della anisotropia
della macchina sincrona a poli salienti.
Quindi sostituendo El = − Jωλl = − JωLt Cl I l = − JX t Cl I l dove Xt è la reattanza al traferro.
Seguendo lo stesso metodo di calcolo si arriva ad ottenere un espressione simile per la tensione
indotta trasversale Et = − Jωλt = − JωLt Ct I t = − JX t Ct I t
Possiamo semplificare le due espressione chiamando:
X t Cl = X tl reattanza al traferro longitudinale
X t Ct = X tt reattanza al traferro trasversale
In questo modo la nostra equazione di equilibrio elettrico sarà:
E0 = jX tl Il + jX tt It + jX d I a + U
7
( commento al grafico )
Ipotizziamo come sempre di conoscere il flusso di eccitazione, il valore della corrente di eccitazione
e quindi il valore della tensione indotta E0 e ipotizziamo di conoscere il valore della corrente Is ed in
particolare conosciamo l'angolo ε di sfasamento tra la corrente Is e la tensione indotta E0; quindi
conosciamo le due quantità che sono la corrente trasversale e la componente di corrente
longitudinale. Dobbiamo ricavare questa quantità,
basta semplicemente considerare la
combinazione di questi due vettori: jXtlIl questa è la corrente Il il termine jXtlIl è in anticipo di 90
gradi rispetto alla corrente Il .
Il vettore jXttIt è sempre in anticipo di 90° rispetto alla corrente It, infine avremo la solita caduta
sulla nostra impedenza di dispersione ed otterremo il vettore U.
Questa è un'altra rappresentazione del nostro diagramma vettoriale, è esattamente identica a prima,
soltanto che la rappresentazione è stata ottenuta in termini di cadute di tensione e non di tensioni
indotte.
Questo semplicemente per far notare che i termini di reattanza al traferro trasversale e longitudinale
non sono dei termini rappresentanti delle cadute di tensione ma sono dei termini rappresentanti delle
tensioni indotte dalla reazione di armatura delle componenti di campo associate alle correnti Il e It .
La relazione che abbiamo ottenuto può essere ulteriormente semplificata, infatti sappiamo che la
reattanza di dispersione è relativa a dei flussi di dispersione: i flussi di dispersione sono flussi che
circolano prevalentemente in aria quindi sono caratterizzati da un comportamento di tipo lineare e
quindi potremmo tranquillamente applicare per essi il principio di sovrapposizione degli effetti e
quindi ritenere che il flusso di dispersione sia prodotto dalla somma del flusso di dispersione dovuta
alla componente trasversale It e la componente longitudinale della corrente Is. L’equazione di
equilibrio elettrico assume la seguente forma:
E 0 = j ( X d + X tt )I t + j ( X d + X tl )I l + U
dove definiamo:
X st = ( X d + X tt ) reattanza sincrona trasversale
X sl = ( X d + X tl ) reattanza sincrona longitudinale
Quindi l'equazione di equilibrio elettrico per una macchina sincrona a poli salienti a cui siamo giunti
è la seguente:
8
E 0 = jX st I t + jX sl I l + U
Come si può notare la relazione di equilibrio elettrico è formalmente simile a quello che abbiamo
visto per la macchina elettrica sincrona a poli lisci. Rappresentiamo le grandezze in un diagramma
che viene chiamato diagramma di Blondel.
In realtà questo diagramma non potrebbe essere realizzato perché
non si cosce l’angolo tra la tensione a vuoto E0 e la corrente ti
statore Ia, ma tramite uno studio di tipo geometrico riusciamo a
costruire questo diagramma solo dalla conoscenza della U della Ia e
del loro sfasamento.
Facciamo partire dal punto A la perpendicolare alla corrente d’armatura che intersecherà la retta
d’azione di E0 nel punto C. Si prosegue sino al
punto B, intersezione della retta ortogonale alla
corrente e della retta ortogonale alla E0.
Il segmento AC è l’ipotenusa del triangolo ACD
quindi AC =
DA
cos ε
dove
DA = X st I t = X st I a cos ε quindi il segmento
AC = jX st I a .
Guardando il triangolo AKB si vede che il
segmento
BA =
BK
sin ε
dove
BK = X sl I l = X sl I a sin ε quindi il segmento
BA = jX sl I a
Quindi misurando la tensione U, la corrente d’armatura Ia e il loro sfasamento si riesce a costruire il
diagramma di Blondel. Infatti una volta tracciata l’ortogonale alla corrente di statore partendo dal
punto A, si rintraccia subito il punto C perché è noto il segmento AC = jX st I a . I punti O e C ci
permettono di tracciare la retta d’azione della E0 conoscendo il valore della retta BA = jX sl I a
9
automaticamente conosciamo la posizione del punto B, quindi ci basta tracciare la perpendicolare
alla retta d’azione di E0 che si interseca nel punto B per chiudere il grafico.
Questo procedimento è fondamentale per la determinazione del diagramma di Blondel che ci porterà
a determinare le caratteristiche di coppia e di funzionamento della macchina a poli salienti.
Studio della coppia e delle potenze in una macchina sincrona a poli salienti
Individuato una metodologia diretta per la determinazione del diagramma vettoriale ci interessa
effettuare esattamente le stesse considerazioni che abbiamo fatto per la macchina elettrica sincrona a
poli lisci, cioè determinare tutti i luoghi geometrici dei punti caratterizzati da eccitazione costante e
da corrente di armatura costante. Nel caso della macchina sincrona a poli lisci abbiamo visto che il
diagramma vettoriale, rappresentante l’equazione di equilibrio elettrico, era molto semplice perché si
trattava semplicemente di tracciare delle circonferenze, in questo caso questa operazione non è più
così tanto semplice quindi il tracciamento dei diagrammi vettoriali è piuttosto complicato.
Vediamo come svolgere l'analisi di diagrammi vettoriale nel caso di una macchina a poli salienti.
Come abbiamo fatto per la macchina elettrica sincrona a poli lisci passiamo dal diagramma vettoriale
rappresentante le tensioni al diagramma vettoriale rappresentativo delle correnti, basterà dividere
l'equazione di equilibrio elettrico E 0 = U + jX st I t + jX sl I l per jXsl si ottiene:
E0
U
X
=
+ st ⋅ I t + I l
jX sl jX sl X sl
Vedete non riusciamo ad ottenere una relazione o una rappresentazione che ci dia una indicazione
relativamente alla corrente d’armatura perché si ottiene una esplicitazione della corrente
longitudinale.
Ci viene in aiuto il diagramma di Blondel, infatti si nota immediatamente che i segmenti: CA e il
segmento AB non sono nient'altro che vettorialmente delle quantità pari a jXtIa e jXlIa.
Se dividiamo il diagramma di Blondel, non l'equazione di equilibrio elettrico, per jXl otteniamo una
rappresentazione che è espressione della corrente di armatura Ia, infatti dividendo per jXl tutto il
diagramma vettoriale ruota di 90° in ritardo.
10
Ci siamo riportati in una situazione simile a quella vista per la macchina elettrica sincrona a poli
lisci, la proiezione della corrente Ia sulla tensione U ci consente immediatamente di ricavare la
potenza attiva P della macchina e la proiezione della corrente Ia in quadratura con U ci consente di
ricavare la potenza reattiva Q.
I due assi, quello in fase con la tensione e quello in quadratura con esso, rappresenteranno, a meno di
un fattore di scala, l'asse delle potenze attive e l'asse delle potenze reattive. Sappiamo che :
P = ms ⋅ U ⋅ I a ⋅ cos ϕ
Q = ms ⋅ U ⋅ I a ⋅ sin ϕ
Come nelle macchine elettriche sincrone a poli lisci abbiamo individuato il diagramma delle potenze.
Siamo in una macchina sincrona collegata ad una rete di potenza prevalente, la velocità di rotazione
meccanica coincide con la velocità di sincronismo ed è costante, il legame tra la potenza elettrica e la
coppia meccanica sviluppata all'asse è un legame di diretta proporzionalità quindi l'asse delle potenze
ci consente anche di avere un'idea di quale è la coppia meccanica sviluppata all'asse.
Come si può immediatamente notare il vettore della tensione indotta E0 diviso la reattanza sincrona
longitudinale e il vettore Ia non presentano i vertici coincidenti (punti B e D non sono in comune),
questo non ci consente di legare direttamente l'eccitazione alla corrente di armatura, avranno due
evoluzioni che sono differenti, ci sono delle difficoltà nel trovare i punti di funzionamento della
macchina, si può anche notare che in questa situazione non si riesce a capire il legame tra la potenza
attiva e l’angolo di carico θ. Dovremo costruirci un diagramma che consenta di riportarci a una
situazione simile a quella della macchina elettrica sincrona a poli lisci per fare esattamente le stesse
considerazioni.
(costruzione del grafico).
Prendiamo il vettore E0/jXl e lo si trasla in modo tale da farlo coincidere con il vertice B :
11
prolungando , facciamo intersecare la retta d'azione sulla quale giace il vettore E0/jXl traslato con la
retta d'azione sulla quale giace il vettore U, otteniamo il punto O'.
L'intersezione della retta d'azione ortogonale ad E0/jXl individua K. Consideriamo una retta spiccata
da A ortogonale a E0/jXl , riporto un'ampiezza pari al vettore E0 . Questo vettore è ortogonale al
vettore E0/jXl e in anticipo di 90° quindi non sarà nient'altro che il vettore E0 stesso. I punti di
intersezione con le due rette parallele li chiamo S e V.
Abbiamo detto che, per riportarci ad una struttura che sia simile ad una macchina elettrica sincrona a
poli lisci trasliamo il vettore E0/jXl fino a quando coincide con il punto B. Ora però al variare
dell'angolo di carico θ dobbiamo avere che questa operazione di traslazione sia sempre consentita e
per fare questa operazione bisogna conoscere da quale punto devo realizzare il tracciamento del
vettore E0/jXl , quindi devo vedere se il punto K, che è il punto da cui ho tracciato il vettore E0/jXl, è
un punto che è caratterizzato da un'evoluzione invariante oppure è caratterizzato da una evoluzione
che dipende strettamente dall'evoluzione di funzionamento della macchina.
Se riesco a dimostrare, che il punto K segue un'evoluzione che è invariante rispetto alle condizioni di
funzionamento, ho individuato un metodo unico, univoco, che mi consente di costruire i luoghi
geometrici a corrente di eccitazione costante e a corrente di armatura costante.
Andiamo a dimostrare che il punto K è un punto che può essere determinato in maniera univoca è
indipendentemente dalle condizioni di carico. Per fare questo consideriamo i due triangoli simili
KOO' e SOA , caratterizzati dall'angolo di carico θ. Dato che i due triangoli sono simili possiamo
impostare la proporzione:
KO
OO' KO
⇒ OO' =
=
⋅ OA
OA
SA
SA
Andiamo ad individuare il valore dei singoli segmenti.
U
Per quanto riguarda OA, in modulo è pari a: OA =
X sl
X
Andiamo a ricavare il valore SA, è la proiezione di (Xst/Xsl )Ia su E0: SA = st ⋅ I a cos ε
X sl
X
anche il segmento KO è immediato: KO = VA − SA = I a cos ε − st ⋅ I a cos ε
X sl
12
Sostituendo questi termini:
OO' =
KO
SA
⋅ OA =
X − X st
X X
U I a cos ε
1 − st sl = sl
X sl I a cos ε
X sl X st X sl ⋅ X st
⋅ U
Abbiamo dimostrato il segmento OO' è indipendente dalle condizioni di carico, cioè dalla corrente
circolante nello statore e dall’angolo di carico, dipende soltanto dalle reattanze Xsl e Xst e dalla
tensione di alimentazione che sono dei termini costanti.
Quindi, se la macchina è collegata ad una rete di potenza prevalente il segmento OO' rimane
costante, dunque il punto K non potrà che descrivere, al variare dell'angolo di carico θ, una
circonferenza, perché per costruzione abbiamo fatto in modo che il segmento KO e il segmento O'K
mi costituissero sempre un angolo di 90°. Si nota che la circonferenza esiste perché si ha la
differenza X sl − X st in una macchina a poli lisci questa differenza è pari a zero perché non presenta
delle anisotropie.
Il luogo dei punti di K al variare di θ è una circonferenza, qualunque sia il valore della corrente Ia,
abbiamo dimostrato che il punto K segue una traiettoria invariante rispetto alle condizioni di carico.
Questa condizione è fondamentale perché ci consente di ricavare abbastanza agevolmente il valore
della coppia prodotta da questo tipo di macchine, infatti abbiamo detto che la potenza elettrica
sviluppata dalla macchina è esattamente pari a P = ms ⋅ U ⋅ I a ⋅ cos ϕ
Se la macchina funziona come generatore, forniamo potenza meccanica ed eroghiamo potenza
elettrica, il fattore di conversione è dato dal rendimento della macchina elettrica sincrona, che sarà
pari a:
η=
Pe
Pm
⇒ Pm =
Pe
η
Pm
Pe
η
La potenza meccanica è uguale a:
13
Pm = Cm ⋅ ωm = Cm ⋅
ωs
con
p
ωm =
ωs
p
condizione di sincronismo
(dove ωm è la velocità angolare e ωs rappresenta la pulsazione di alimentazione).
Cm =
La coppia meccanica è pari a:
Pm ⋅ p
ωs
=
Pe ⋅ p
p
=
⋅ m ⋅ U ⋅ I a ⋅ cos ϕ
ω s ⋅η ω s ⋅η s
Se i parametri di macchina sono tutti definiti vedete che, come dimostrato precedentemente il legame
fra coppia meccanica e componente della corrente in fase con la tensione è un legame di diretta
proporzionalità.
Nelle macchine elettriche sincrone a poli lisci però abbiamo espresso la coppia non solo in funzione
della tensione e della corrente e dell'angolo compreso tra i due, ma anche in funzione della tensione
sotto carico e della tensione indotta vuoto e dell'angolo compreso tra questi due vettori.
Andiamo a vedere che forma assume quest'espressione nel caso della macchina elettrica sincrona a
poli salienti.
Abbiamo visto che la coppia meccanica è pari a Cm =
p
⋅ m ⋅ U ⋅ I a ⋅ cos ϕ
ωs ⋅ η s
La quantità Iacosϕ non è altro che il segmento BN e può espresso come:
E
X − X st
I a ⋅ cos ϕ = O' B ⋅ sin θ = BK + O' K sin θ = 0 + sl
⋅ U cos θ ⋅ sin θ
X sl ⋅ X st
X sl
(
)
Andando a sostituire nell'espressione abbiamo che la coppia meccanica è pari a:
U ⋅ E0
p
U 2 X sl − X st
⋅ sin 2θ
Cm =
⋅ ms ⋅
sin θ +
⋅
ω s ⋅η
2 X sl ⋅ X st
X sl
Abbiamo ricavato l'espressione della coppia sviluppata da una macchina elettrica sincrona a poli
salienti. Si può notare che la macchina sviluppa una coppia che è data dalla combinazione di due
termini. Il primo termine è uguale a quello che abbiamo visto per la macchina elettrica sincrona a
poli lisci:
U ⋅ E0
p
⋅ ms ⋅
⋅ sin θ
ω s ⋅η
X sl
l’unica differenza è che al posto della reattanza sincrona c’è la
reattanza sincrona longitudinale.
Il secondo termine non dipende più dalla tensione indotta ma dipende esclusivamente dalla
differenza tra la reattanza sincrona longitudinale e la reattanza sincrona trasversale.
p
U 2 X sl − X st
⋅ ms ⋅
⋅
⋅ sin 2θ
2 X sl ⋅ X st
ω s ⋅η
coppia di riluttanza
Abbiamo visto già nelle nostre trattazioni che vi sono delle coppie che vengono sviluppate al
sincronismo in funzione della anisotropia presente nella macchina, queste coppie erano le cosiddette
coppie di riluttanza. Questa quantità non è altro che una coppia di riluttanza, infatti se l'anisotropia
del sistema cessa, cioè se abbiamo che la reattanza sincrona longitudinale è uguale alla reattanza
sincrona trasversale, quindi l'anisotropia è nulla, questo termine diventa esattamente uguale a zero.
Un’altra osservazione che si può fare è che questa coppia dipende soltanto dalla tensione di
alimentazione non dall'eccitazione, questo perché è una coppia che dipende dalla anisotropia della
struttura e non da come stiamo eccitando la macchina. Questa coppia è presente anche se la macchina
non è eccitata, quindi se inviamo nel circuito rotorico una corrente di eccitazione nulla Iecc=0 questa
coppia è ancora presente, perché è una coppia che nasce dalla anisotropia della struttura. Questa
coppia è una coppia presente solo al sincronismo ( l'abbiamo visto nelle generalità ), ed è una coppia
14
con caratteristiche non lineari, infatti il legame che sussiste tra la coppia di riluttanza e la tensione
presente sulla macchina è un legame di tipo quadratico che è un legame tipicamente non lineare.
Questo mette in luce come anche tramite l’azione della doppia reazione lo sviluppo dei calcoli ci
porta a dimostrare che il comportamento di questa macchina è un comportamento non lineare e che
viene evidenziato proprio nella sua coppia elettromagnetica, quindi la coppia elettromagnetica
presenta un'evoluzione di tipo non lineare dato dalla somma di un termine di sincronismo ed un
termine di riluttanza.
Bisogna considerare che non abbiamo solo una coppia di sincronismo, ma abbiamo una coppia di
riluttanza quindi l'evoluzione della coppia funzione dell'angolo θ non sarà più uguale a quella che
avevamo nelle macchine elettriche sincrone a poli lisci, ciò significa che anche le condizioni di
stabilità di una macchina sincrona a poli salienti saranno diverse da quelle di una macchina sincrona
a poli lisci. Andiamo ad analizzare quale è l'andamento della coppia meccanica in funzione
dell'angolo θ.
Abbiamo visto che per quanto riguarda la macchina elettrica sincrona, l'andamento della coppia per
un determinato valore della corrente di eccitazione assumeva un andamento di tipo sinusoidale, in
questo caso invece accanto al termine relativo al funzionamento sincrono vi è anche un altro termine
che è relativo alla coppia di riluttanza che presenta una periodicità pari a 2θ
θ.
L' andamento della coppia risultante è dato dalla somma della coppia di sincronismo o coppia
sincrona con la coppia di riluttanza, ottenendo un andamento della coppia che è all'incirca di questo
tipo
Cm
Coppia totale
π/2
π
θ
Coppia di riluttanza
Per l'angolo θ pari a 0 o a π la coppia è nulla e che per π/2 la coppia presente è solo quella sincrona.
Si nota che non eccitando la macchina è presente la sola coppia di riluttanza, andando gradualmente
ad eccitare si vede che il termine associato alla coppia sincrona cresce e man mano supera la coppia
di riluttanza, vedremo quindi il massimo della coppia che si sposta questo vuol dire che sia il
massimo che i punti di funzionamento della macchina sono funzione dell’eccitazione.
Analisi dei punti di stabilità della macchina
Tracciamo quelle curve caratteristiche che ci individuano i punti di funzionamento della macchina,
cioè le curve ad eccitazione costante e le curve a corrente di alimentazione costante.
Vediamo di tracciare la prima di queste curve: la curva ad eccitazione costante.
Abbiamo effettuato la costruzione proprio per questo scopo, per riportare il diagramma vettoriale ad
una struttura che è identica a quella di una macchina sincrona a poli lisci, quindi vediamo come
effettuare il tracciamento del luogo a eccitazione costante.
Se l'eccitazione è costante questo vuol dire che il valore della tensione indotta a vuoto E0 è costante
quindi il vettore E0/jXl presenta un modulo costante.
( costruzione del grafico )
15
Si fa variare l'angolo di carico tra 0 e 2π,durante questa variazione abbiamo dimostrato che il punto
K , ottenuto dalla traslazione del vettore E0/jXsl , si muove lungo una circonferenza, quindi il
tracciamento del luogo è abbastanza semplice: considero una generica retta con un generico angolo
di carico θ spiccata dal punto O’, questo intersecherà un punto K'', dal punto K'' traccio un vettore
di modulo esattamente pari a E0/Xsl.
Il punto B è il punto rappresentante la corrente Ia nelle nuove condizioni di angolo di carico. Ripeto
questa operazione per tutti i valori di θ. Vediamo alcuni casi particolari: nel caso in cui θ =π/2
l'operazione è semplice, avremo che il vettore è tangente proprio alla circonferenza è presenterà un
modulo che sarà pari a E0/jXsl. Andiamo ora a considerare un angolo intermedio tra π /2 e π , in
questo caso partendo da O’ si ottiene l'intersezione con il punto K''' e dal punto K''' tracciamo lungo
la retta d'azione il vettore E0/jXsl. E così via.
Chiocciola di Pascal
L'andamento del luogo dei punti ad eccitazione costante non seguirà una curva classica ma seguirà
una curva che prende il nome di chiocciola di Pascal .
Per ogni valore della corrente di eccitazione otterremo una funzione di questo genere; per un
particolare valore della corrente di eccitazione, cioè per la corrente di eccitazione esattamente uguale
a zero otterremo una chiocciola di Pascal degenere cioè è rappresentata da una circonferenza.
Se la corrente di eccitazione è nulla, il vettore E0 è nullo però la costruzione deve essere sempre
rispettata: è esattamente la circonferenza che abbiamo costruito precedentemente cioè la
circonferenza tracciata per individuare il luogo dei punti del punto K al variare di θ rappresenta la
chiocciola degenere di Pascal.
Se la corrente di eccitazione è negativa basta cambiare il segno, cioè non avremo più una E0 positiva
ma una E0 che sarà opposta in fase e quindi l'operazione dovrà essere esattamente ribaltata di 180°,
quindi la costruzione risulterà essere all'interno della nostra circonferenza; ripetiamo esattamente la
stessa operazione considerando però non un vettore E0 che viene spiccato nella direzione positiva ma
un vettore E0 che viene spiccato nella direzione negativa.
Quindi le chiocciole di Pascal possono essere sia esterne alla circonferenza degenere sia interne
alla circonferenza degenere, questo è il luogo ad eccitazione costante.
16
Il luogo a corrente di armatura costante è molto più semplice da tracciare perché in questo caso basta
considerare la corrente di armatura perfettamente costante centrata nel punto A, far variare l'angolo ϕ
tra 0 e 2π per ottenere come risultato una circonferenza. Quindi il luogo dei punti a corrente di
armatura costante viene rappresentato proprio da una circonferenza centrata nel punto A.
Ora c'è da tracciare un ultimo luogo dei punti che è quello relativo alle condizioni al limite di
stabilità. Infatti abbiamo visto che per la macchina elettrica sincrona a poli lisci esiste una condizione
di stabilità meccanica, Che era quella che si otteneva per l'angolo θ esattamente pari a π/2. Bisogna
verificare se questa condizione è rispettata anche per la macchina elettrica sincrona a poli salienti
oppure se abbiamo condizioni di stabilità che sono diverse.
Andiamo quindi a rappresentare la curva limite di stabilità sul piano delle potenze, questo ci è utile
perché consente di definire quelle che sono le zone interdette al funzionamento della macchina
elettrica sincrona a poli salienti.
Consideriamo U/jXsl, la corrente Ia e la sua quantità (Xst/Xsl)Ia e tracciamo il vettore di E0/jXsl,
tracciamo il diagramma delle potenze. Abbiamo visto che se consideriamo il luogo dei punti ad
eccitazione costante otteniamo una curva che prende il nome di chiocciola di Pascal.
Individuata la chiocciola di Pascal è possibile immediatamente determinare la condizione relativa
alla coppia massima, cioè il punto che caratterizza la coppia massima. Il punto CMAX sarà anche il
punto per il quale si avrà la potenza massima perché siamo al sincronismo.
17
Se conosciamo la chiocciola di Pascal possiamo determinare, per quel valore della corrente di
eccitazione, il punto per il quale la coppia è massima (punto di massimo sulla chiocciola) e il relativo
angolo θ.
Procedendo per i diversi valori di corrente di eccitazione, descrivendo le diverse chiocciole di Pascal
arriviamo a descrivere una caratteristica, questa caratteristica è il luogo dei punti che congiungono
tutti i massimi delle chiocciole di Pascal, sono anche tutti i punti caratterizzati dal funzionamento al
limite di stabilità.
Questa curva prende il nome di caratteristica limite di stabilità della macchina elettrica sincrona a
poli salienti. Come si può notare è ben diversa dalla caratteristica limite di stabilità vista per la
macchina a poli lisci, infatti questa era una retta con una pendenza pari a 90° mentre in questo caso la
struttura è ben diversa. Anche in questa macchina, per motivi di sicurezza, si tende a fissare un limite
di stabilità pratico.
*
Vediamo come fissare questi limiti. Si fissa un valore di coppia limite ∆ C che ci consente di
individuare nel grafico un limite di sicurezza per il funzionamento della nostra macchina ed evitare
che il sistema passi ad una condizione di instabilità.
*
Per riportare questa situazione nella caratteristica , basta fissare il ∆ C rispetto al valore di coppia
massima e individuare sulla chiocciola di Pascal il punto limite. Questo ci consentirà, raggruppando
tutti i punti, di individuare il limite di stabilità pratico della macchina elettrica sincrona a poli
salienti.
18
limite di stabilità pratico
P Cm
caratteristica limite di stabilità
Kmax
C MAX
∆*C
B
Is
C
θmax
θ
O'
O
A
Q
Come si può notare il campo di stabilità sta in un intorno tra 0 e π/4, quindi è notevolmente più
ristretto rispetto alle macchine sincrone a poli lisci, anche considerando i limiti teorici di stabilità gli
angoli di carico utilizzabili restano sempre notevolmente inferiori rispetto alle macchine a poli lisci.
Anche per queste macchine si deve utilizzare un
motore primo che collegato al rotore lo mette in
rotazione e porta la macchina alla velocità di
sincronismo.
L’albero motore con cui viene collegato alla
macchina avrà una determinata resistenza
meccanica, quindi la macchina sincrona non può
raggiungere determinati valori di coppia che
porterebbero a rottura l’albero, questo porta a
delle limitazioni nel funzionamento della
macchina.
Questi limiti graficamente sono rappresentati da
una retta parallela all’asse delle potenze reattive.
Una volta definito il limite di stabilità pratico, la massima corrente di eccitazione , la massima
corrente di armatura, la massima coppia legata al motore primo è possibile come abbiamo fatto per le
macchine sincrone a poli lisci individuare una zona che mi rappresenta tutti i punti di potenza attiva e
reattiva che possono essere erogati dalla nostra macchina sincrona a poli salienti, questa è l’unione di
tutti i visti precedentemente. Disegno da fare
Abbiamo dimostrato, dallo studio delle macchine elettriche sincrone a poli lisci, che la condizione
fondamentale affinché una macchina abbia un comportamento stabile è che la derivata della coppia
19
meccanica fatta rispetto a θ sia positiva, quindi dobbiamo essere sempre nella zona caratterizzata
dalla derivata di coppia che sia positiva, quindi nella zona ascendente.
Calcolo della reattanza sincrona longitudinale e trasversale
Considerando il diagramma delle correnti, ipotizziamo di essere connessi a una rete di potenza
prevalente U=cost; ωs=cost e corrente di eccitazione nulla I ecc = 0
Dato che la corrente di eccitazione è pari a zero la tensione indotta a vuoto è nulla quindi la corrente
di statore Ia andrà a coincidere con una delle
tante chiocciole di Pascal.
Se mandiamo in ipersincronismo la macchina,
ma restando quasi al sincronismo, quindi
ωm ≠
ωs
p
la corrente d’armatura avrà una
frequenza leggermente maggiore della tensione
applicata. Questo fa si che il vertice della
corrente Ia percorra tutta la circonferenza questo
gli fa assumere nel tempo un’oscillazione tra un
valore minimo e un valore massimo. Nella posizione i minimo i vettori U/jXsl e Ia sono coincidenti
min
quindi I a =
U
nella posizione di massimo sarà pari a:
X sl
I amax =
X − X st
X − X st
U
U
1 + sl
+ sl
U =
X sl
X sl ⋅ X st
X sl
X st
U X sl U
=
=
X
X
X st
sl
st
dato che la tensione U la stiamo applicando e la corrente Ia la stiamo misurando automaticamente
siamo in grado di ricavare il valore della reattanza sincrona longitudinale e trasversale.
Misurando la corrente di statore tramite un oscilloscopio si vedrà la corrente un andamento del tipo
Da cui può esser estrapolato il valore massimo e minimo, questo particolare andamento si crea
perché il campo magnetico prodotto dalla corrente di statore vede il rotore muoversi lentamente dato
che siamo in una condizione di ipersincronismo, quindi il campo di statore vede un circuito
magnetico che cambia e passa da un valore di riluttanza massimo a uno di riluttanza minimo. Quando
la riluttanza è massima la tensione è comunque fissa e il flusso deve quindi restare costante, allora si
20
deve applicare una f.m.m. maggiore e quindi si deve far circolare una corrente maggiore, mentre per
una riluttanza minima la f.m.m. da applicare è la minima e quindi servirà una corrente minima per
non far variare il flusso.
Funzionamento in saturazione della macchina sincrona a poli salienti
In realtà la macchina sincrona a poli salienti è caratterizzata da un funzionamento di tipo non lineare,
infatti la macchina presenta un nucleo ferromagnetico e questo per sua natura è sottoposto a effetti di
saturazione.
Il nostro scopo è quello di analizzare il funzionamento della macchina quando si passa da una
condizione di funzionamento lineare ad una non lineare, questo studio è molto importante perché
questo tipo di macchina lavora molto spesso in saturazione.
Ovviamente tutta la trattazione fatta finora viene a cadere, tutti i calcoli, le rappresentazioni, tutte le
modellizzazioni alle quali eravamo pervenuti erano basate sul principio di sovrapposizione degli
effetti.
Vediamo allora di individuare un metodo che ci consenta di studiare in regime non lineare, quindi in
regime di saturazione, le macchine elettriche sincrone a poli salienti.
Tenete conto che in regime di non linearità non sarà più valido il principio di sovrapposizione degli
effetti ma sarà sempre valido il principio di sovrapposizione delle cause, la causa fondamentale della
formazione del campo magnetico all’interno della nostra macchina è la forza magneto-motrice; forza
magneto-motrice di statore e forza magneto-motrice di rotore.
Quindi anche in condizioni di funzionamento non lineare sarà applicabile il principio di
sovrapposizione relativamente alle forze magneto-motrici.
Lo studio è quindi identico a quello sviluppato per le macchine elettriche sincrone a poli lisci con la
sola differenza che applicando il principio di sovrapposizione delle cause, in questo caso dobbiamo
tener conto che non è presente solo la f.m.m. d’armatura, ma ci sono due f.m.m. d’armatura: una
relativa alla reazione in quadratura (trasversale) e l’altra relativa alla reazione longitudinale o diretta.
FT = FECC + FAL + FAT
L’espressione da utilizzare sarà la seguente:
FT = f.m.m totale
FECC = f.m.m di eccitazione
FAL = f.m.m di armatura longitudinale
FAT = f.m.m di armatura trasversale
Vediamo
di
applicarla.
Si
parte
sempre
dalla
relazione
di
equilibrio
elettrico
E δ = jX d ⋅ I a + U
Una volta nota la tensione U, è noto il valore di Ia quindi è possibile ricavare quale è la f.m.m.
complessiva d’armatura FA comprensiva del termine longitudinale e del termine trasversale.
Se è noto U ed Ia e Xd possiamo ricavare il valore della tensione complessivamente indotta Eδ tramite
la caratteristica a vuoto si ricava la corrente di eccitazione e da questa possiamo risalire alla corrente
Iδ.
A questo punto conosciamo il valore della f.m.m. totale FT in quadratura e in ritardo rispetto a alla Eδ,
per ricavare il valore della f.m.m. longitudinale e trasversale dobbiamo utilizzare una procedura che è
identica a quella che abbiamo visto nel caso del diagramma di BLONDEL. Dovremo considerare il
termine Fa Ct e Fa CL , questo diagramma ci permetterà di ricavare la FECC :
21
JX s ⋅ I a
E
E0
V
Fa
Ia
FT
O
Fecc
Fa Ct
D
Fa Cl
infatti si traccia da questo punto la congiungente con il punto D poi si proietta sulla retta d’azione il
vettore FaCl , il vettore così ottenuto risulta essere la f.m.m. di eccitazione. Individuata questa,
entriamo all’interno della caratteristica, ricaviamo il vettore E0 e conseguentemente definiamo il
vettore E0 in modulo e fase. Questa è l’operazione con la quale si giunge alla determinazione della
f.m.m di eccitazione e della tensione indotta E0.
(precisazione): dovete ricostruirvi in funzione di E0 le componenti di corrente e di f.m.m. ed
applicare esattamente lo stesso processo di costruzione visto per il diagramma di BLONDEL
Quindi abbiamo visto anche un metodo che ci consente di studiare il funzionamento di una macchina
elettrica sincrona sia a poli lisci che a poli salienti in condizione di saturazione. Anche per le
macchine sincrone a poli salienti, valgono le stesse considerazioni dei fenomeni di apertura a fine
linea viste per la macchina sincrona a poli lisci.
22
La macchina asincrona
Le macchine elettriche asincrone sono principalmente delle macchine elettriche isotrope,
conseguentemente la struttura statorica e la struttura rotorica sono delle strutture cilindriche una coassiale
con l'altra. Quindi abbiamo lo statore, che è un cilindro cavo, il rotore che è un cilindro pieno le due
strutture sono perfettamente coassiali l'una con l'altra, ovviamente tra il rotore e lo statore vi è un tratto
d'aria che prende il nome di traferro, il traferro come nelle macchine elettriche sincrone a poli lisci ha un
doppio scopo: il primo è quello di consentire il movimento correlativo della rotore rispetto allo statore e
quindi di assicurare un gioco meccanico tra i due sistemi, il secondo è quello di eseguire una operazione di
linearizzazione della struttura magnetica e quindi far sì che si possa applicare a questo tipo di sistemi il
principio di sovrapposizione degli effetti. Le macchine elettriche asincrone vengono così definite perché
ω
lavorano principalmente ad una velocità di rotazione che è diversa da quella di sincronismo s ≠ ω m .
p
La macchina elettrica asincrona è costituita da un avvolgimento trifasico uniformemente distribuite sulla
superficie di statore (solitamente è il circuito di eccitazione). L’avvolgimento di rotore è generalmente un
avvolgimento polifasico che nel funzionamento normale presenta le fasi cortocircuitate (solitamente è il
circuito di indotto).
La modalità con cui viene realizzato l’avvolgimento di rotore classifica il tipo di macchina.
Esistono 2 tipologie di macchine:
La macchina a rotore avvolto, in questo caso l’avvolgimento viene realizzato come
l’avvolgimento statorico, cioè con delle matasse che sono collegate tra di loro in maniera
opportuna e uniformemente distribuite sulla superficie di rotore. Il numero di
fasi
dell’avvolgimento rotorico è uguale al numero di fasi statoriche .
A gabbia di scoiattolo, l’avvolgimento rotorico è costituito da delle barre che vengono affogate
all’interno del rotore e opportunamente cortocircuitate con degli anelli
L’avvolgimento a gabbia di scoiattolo si suddivide in altre tipologie:
L’avvolgimento a doppia gabbia di scoiattolo e avvolgimento a barre profonde. Questo dipende
dalla struttura geometrica con cui vengono realizzate le barre.
Ipotizzando il funzionamento a regime studiamo il principio di funzionamento della macchina elettrica
asincrona, per poter determinare il modello matematico, e il suo circuito equivalente.
Analizziamo il suo funzionamento partendo da una condizione di funzionamento a vuoto.
FUNZIONAMENTO A VUOTO
Alimentiamo l’avvolgimento statorico con un sistema di correnti simmetrico e apriamo l’avvolgimento
rotorico, questo ci permetterà di individuare le condizioni che si creano sull’avvolgimento rotorico quando
l’avvolgimento statorico viene alimentato.
Alimentando con un sistema equilibrato di correnti
is1= √2 Is sin ωst
is2= √2 Is sin (ωst - 2 π/3)
is3= √2 Is sin (ωst - 4 π/3)
Creiamo un campo magnetico rotante che presenta un valore massimo che dipende dalla forza magneto
motrice applicata e quindi dalla corrente is, la velocità meccanica risulta essere collegata alla pulsazione
1
di alimentazione e al numero di coppie polari, in particolare il campo magnetico ruota con una velocità
ωs/p. Sappiamo dalle generalità che sicuramente un sistema trifase produce una caduta di f.m.m. del tipo
∆Fs (α , t ) =
3 ˆ
µ
∆Fss cos(ω s t − pα ) e che esiste un legame con il campo Bs (α , t ) = 0 ∆Fs (α , t )
2
δ
In base a queste considerazioni
ricaviamo il campo magnetico prodotto dallo statore
Bs (α , t ) = Bˆ s cos(ω s t − pα )
(campo magnetico visto da un osservatore solidale con lo statore)
Noi vogliamo analizzare cosa accade nell’avvolgimento rotorico. Ipotizziamo che l’avvolgimento rotorico
si muova con una generica velocità pari ad ωm . Passando dal sistema di riferimento statorico al sistema di
riferimento rotorico si avrà α = β + ζ = β + ω m t + ζ 0 quindi
Bs ( β , t ) = Bˆ s cos[(ω s − ω m )t − pβ ] = Bˆ s cos( sω s t − pβ )
con ζ = 0
0
Dove s risulta essere lo scorrimento cioè la velocità relativa con cui si muove il campo magnetico rotante
rispetto al sistema di riferimento
s=
ω s − pω m
ωs
L’avvolgimento rotorico viene investito da un campo magnetico rotante che ruota non più alla velocità
ωs/p ma alla velocità sωs/p. Quindi il campo magnetico visto dall’avvolgimento rotorico, nel caso in cui
s risulti essere diverso da zero, è ancora un campo magnetico rotante.
Noi sappiamo che se un avvolgimento polifasico uniformemente distribuito viene investito da un campo
magnetico rotante su di esso si induce un sistema di tensioni che risulta essere perfettamente simmetrico,
λr = Lt 2 I s sin( sω s t )
infatti avremo un flusso pari a
Vediamo che il flusso concatenato con ogni avvolgimento rotorico risulta essere strettamente collegato
alle caratteristiche geometriche della macchina e all’intensità del campo, quindi alla corrente statorica che
ha prodotto il campo, in più il flusso mantiene una forma di tipo sinusoidale variabile nel tempo, la cui
frequenza risulta essere collegata alla velocità di rotazione del campo.
Ricaviamo il valore della tensione indotta sull’avvolgimento rotorico.
er = −
dλ r
= − Lt sω s 2 I s cos sω s t
dt
Quindi la tensione indotta sul rotore risulta essere collegata al valore del campo al traferro e quindi alla
corrente circolante nell’avvolgimento statorico, risulta anche essere strettamente collegato allo
scorrimento, in più presenta una evoluzione di tipo sinusoidale la cui pulsazione risulta essere s ωs cioè
risulta essere legata alla velocità relativa del campo magnetico rotante rispetto al sistema di riferimento
rotorico.
Si vede immediatamente che la presenza di una tensione indotta di tipo sinusoidale è legata alla presenza
di un campo magnetico rotante, infatti se il campo magnetico rotante risulta essere non più rotante ma
stazionario, quindi scorrimento s esattamente uguale a zero, in questo caso la tensione indotta risulta
essere nulla. Quindi la condizione fondamentale è che ci sia movimento relativo del campo magnetico
rotante rispetto al sistema di riferimento rotorico, solo in questo caso si ha tensione indotta
sull’avvolgimento rotorico e quindi lo scorrimento risulta essere diverso da zero
ωs
ωs
s≠0 ⇒
− ω m ≠ 0 cioè deve verificarsi la condizione
≠ ωm
p
p
Quindi perché una macchina di questo genere possa avere una tensione indotta diversa da zero è
necessario che vi siano tra il campo magnetico rotante e la velocità di rotazione le condizioni di
asincronismo, da qui ne deriva il nome di macchina elettrica asincrona (è fondamentale ricordare che i due
campi, di rotore e di statore, sono sincroni. Questa è una condizione da verificare se si vuole avere una
coppia costante nel tempo).
Abbiamo detto che questa macchina lavora in condizioni di cortocircuito, cioè l’avvolgimento indotto
viene disposto in cortocircuito, se non esiste una tensione indotta sull’ avvolgimento cortocircuitato in
esso non si avrà la circolazione di corrente e quindi non avremmo un campo magnetico di reazione
2
d’armatura, non si avrà l’interazione tra un campo di reazione e un campo di eccitazione e quindi la
produzione di coppie elettromagnetiche, conseguentemente non abbiamo la conversione di energia
elettrica in energia meccanica. Si capisce che se non si ha tensione indotta non si ha conversione
elettromeccanica dell’energia.
La condizione fondamentale è s ≠ 0, infatti in condizioni di sincronismo questa macchina risulta essere
neutra, non produce nessuna conversione dell’energia elettrica in meccanica e viceversa.
FUNZIONAMENTO SOTTO CARICO
Cortocircuitiamo l’avvolgimento di rotore e manteniamo la macchina in questa condizione. Se è presente
una tensione indotta di tipo sinusoidale sull’avvolgimento di cortocircuito avremo che sull’avvolgimento
circolerà una corrente sinusoidale Ir che risulterà avere frequenza s ωs uguale alla tensione che sto
applicando. Abbiamo detto che gli avvolgimenti rotorici sono uniformemente distribuiti, quindi tutte le
tensioni sono sfasate le une rispetto alle altre in modo da creare un sistema simmetrico, ciò vuol dire che
al sistema simmetrico di tensioni corrisponderà un sistema simmetrico di correnti che presenteranno tutte
la stessa frequenza, queste daranno vita a un campo magnetico rotante con una velocità strettamente
collegata alla frequenza di alimentazione Br ( β , t ) = Bˆ r cos(ω s t − pβ + ϕ )
Il campo magnetico rotante ha la stessa velocità di rotazione del campo di eccitazione e questo si verifica
in qualunque posizione di scorrimento s. Quindi è vero che il rotore e il campo magnetico rotante sono
asincroni ma il campo di eccitazione e il campo di reazione dell’armatura risultano essere perfettamente
sincroni (viaggiano alla stessa velocità in qualunque condizione di scorrimento). Infatti, se variamo lo
scorrimento varia la frequenza della tensione indotta, questa fa variare la frequenza del sistema di correnti
rotoriche che fa variare la velocità del campo magnetico di reazione.
A regime la velocità del campo di statore e di rotore sono sincroni, ma se sono sincroni hanno lo stesso
numero di coppie polari, quindi la coppia elettromagnetica prodotta risulta essere costante nel tempo,
questo è garantito per ogni velocità di rotazione.
MODELLO MATEMATICO DELLA MACCHINA ELETTRICA ASINCRONA
Vediamo che il sistema elettrico rotorico è statorico hanno diversa frequenza (per lo statore ωs invece il
rotore s ωs) dovremmo analizzare i due modelli elettrici separatamente e poi dovremmo individuare delle
operazioni di trasformazione che ci consentono di rendere i due sistemi congrui, cioè trasformarli in modo
che la frequenza sullo statore e la frequenza del rotore siano le stesse. Tenendo conto che i due
avvolgimenti, quello rotorico e quello statorico sono caratterizzati da un numero di spire differenti e da un
numero di fasi differenti, dobbiamo riportarci ad una configurazione equivalente caratterizzata dallo stesso
numero di spire, dallo stesso numero di fasi.
Per poter fare questa analisi partiamo dalla equazione di equilibrio elettrico
v s = Rs is +
dλ s
di
dλ
= Rs is + l ds s + ms
dt
dt
dt
Come si può notare si è scomposto il flusso complessivo di statore in un contributo dato dai flussi di
dispersione e dal contributo del flusso di mutuo accoppiamento (è il flusso associato al campo a traferro).
Dato che siamo in regime sinusoidale posiamo riscrivere la nostra equazione di equilibrio elettrica
Vs = Rs I s + jω s l ds I s + jω s N sφ m
Le resistenze degli avvolgimenti di statore e i flussi dispersi sono piccoli quindi possiamo trascurarli,
allora Vs ≅ jω s N sφ m la macchina viene alimentata a tensione costante questo vuol dire che il flusso di
mutua sarà costante, ma allora il campo a traferro Bδ sarà costante e varierà al variare della tensione
impressa. Il campo a traferro sarà la somma del campo magnetico di rotore e di quello generato allo
statore Bδ = Br + Bs questi due possono anche variare ma la loro somma deve essere sempre costante e
pari al campo magnetico al traferro. Questa analisi mette in luce una differenza con le macchine sincrone,
infatti con esse il controllo della macchina avveniva tramite il controllo del campo di eccitazione mentre
con le macchine asincrone abbiamo la possibilità di controllare il campo a traferro ma non quello di
eccitazione.
3
La presenza di un campo a traferro indurrà una tensione nelle spire degli avvolgimenti rotorici,
l’equazione di equilibrio elettrico al rotore è: −
dλmr
di
= Rr ir + l dr r
dt
dt
in regime sinusoidale avremo
− jsω s N r φ m = Rr I r + jsω s l dr I r
Le due equazioni sono:
Vs = Rs I s + jω s l ds I s + jω s N sφ m
− jsω s N rφ m = Rr I r + jsω s l dr I r
Per portare i due sistemi sullo stesso piano di lavoro dobbiamo come prima cosa rendere le frequenze
uguali, questo è possibile dividendo l’equazione di rotore per lo scorrimento
− jω s N r φ m =
Rr
I r + jω s l dr I r
s
Ora l’equazione al rotore presenta una pulsazione uguale a quella di
statore, ma presenta ancora un numero di spire differente. Moltiplichiamo primo e secondo membro per
Rr
N
Ns
I r + jω s l dr I r s
ottenendo − jω s N sφ m =
siamo riusciti ad avere un flusso di mutua
Nr
s
Nr
uguale in entrambe le equazioni, ma dobbiamo ancora riportare la corrente di rotore nel sistema di
riferimento statorico. Come abbiamo detto il flusso a traferro è originato dalla sovrapposizione del campo
di eccitazione più quello di reazione Bδ = Bs + Br
In termini di forza magneto motrice posso dire che la forza magneto motrice che produce il campo totale
Bδ è dato dalla forza magneto motrice rotorica più la forza magneto motrice statorica: Fδ = Fs + Fr
La definizione di forza magneto motrice noi la conosciamo, in particolare quella totale sarà data da una
corrente equivalente che circolando nella avvolgimento statorico mi produce un campo magnetico totale,
in pratica è come se circolasse una corrente fittizia che chiameremo I µ , quindi la relazione di sopra
possiamo scriverla in questo modo:
N s Iµ = N s Is + N r I r
Possiamo dire che la corrente responsabile che mi produce il campo totale risulta pari a: I µ = I s +
Si tratta di una relazione a noi nota, vista nei trasformatori. Possiamo definire la quantità: −
come la corrente rotorica riportata all’avvolgimento primario che chiameremo
corrente fittizia avrà l'espressione: I µ = I s − I r'
Questo risultato poteva esser ottenuto partendo dal flusso di mutua
Ls = N s2 Γt e Lm = N s N r Γt allora Lm = Ls
La corrente
Nr
Ir
Ns
Nr
Ir
Ns
I r' quindi la nostra
N sφ m = Ls I s + Lm I r sappiamo che
Nr
Nr
Ir
sostituendo si ottiene N sφ m = Ls I s +
N s
Ns
Nr
I r può esser vista come la corrente fittizia I r' che circolando negli avvolgimenti di statore
Ns
mi produce un flusso e un campo magnetico uguale alla corrente I r che circola sugli avvolgimenti di
rotore. La I r' con la I s mi generano il flusso di mutua a cui è associato il campo a traferro Bδ, come
previsto abbiamo ottenuto un risultato identico al caso precedente.
2
Rr
N
N
N
+ jω s l dr I r' s2
Dato che I = r I r ⇒ I r = s I r' sostituendo si ottiene − jω s N sφ m =
Ns
Nr
s
Nr
Ora si deve solamente portare i parametri elettrici di rotore allo statore ma questa operazione è gia stata
N2
fata infatti il termine s2 ci permette, come nei trasformatori, di riportare la resistenza e l’induttanza allo
Nr
'
r
4
statore rispettando il principio di conservazione dell’energia. Otteniamo un’equazione di equilibrio
R'
r
+ jω s l dr' I r'
elettrico di rotore pari a: − jω s N sφ m =
s
Abbiamo tutte le equazioni per determinare il circuito equivalente
V = (Rr + jxds )I s − Eδ
Rr'
' '
−
E
=
+
jx
δ
dr I r
s
'
Iµ = Is + Ir
La complessità della macchina elettrica asincrona si evidenzia nella presenza di un termine a
comportamento non lineare, un sistema che presenta la caratteristica di linearità ha i parametri che sono
costanti nel tempo in questo caso non è cosi perché lo scorrimento varia. Lo scorrimento mi provoca una
variazione della tensione al rotore Er e la variazione della corrente di rotore in fase e in modulo, infatti
Ir =
sω s N r φ m
2
( sω s l dr ) + R
− j arctng
2
r
e
sωs ldr
Rr2
questa variazione mi porta ad una variazione della corrente di
statore. Questo può esser visto meglio dalla costruzione del diagramma vettoriale.
(costruzione diagramma)
conosciamo la tensione applicata alla macchina e trascurandola
resistenza e l’induttanza allo statore possiamo scrivere
V ≅ − Eδ ma allora si conosce anche il flusso al
traferro Eδ ≅ jω s N sφ m e quindi la corrente I µ che è in fase con
il flusso e di modulo costante. Tracciamo ora la corrente di rotore
in una generica posizione, ora sapendo che I µ + I r' = I s possiamo
tracciare la corrente di statore. Si vede che al variare dello
scorrimento(passaggio da un valore di scorrimento s a uno
scorrimento s’) varia sia la corrente e la tensione di rotore, ma
anche la corrente di statore.
Al variare dello scorrimento si avrà quindi una evoluzione della coppia che sarà non lineare, in più la
coppia non può esser controllata in modo puntuale come si faceva per le macchine sincrone dove
potevamo imporre il campo di eccitazione. Nelle macchine asincrone per ottenere lo stesso controllo si
deve passare a una sistema a corrente impressa, con il sistema a tensione impressa si può solamente
imprimere una certa tensione che faccia scorrere determinate correnti per faci ottenere il valore di coppia
voluto, quindi abbiamo un controllo indiretto.
Quindi per poter studiare il circuito equivalente secondo le leggi dell’elettrotecnica dovremmo sempre
ipotizzare di studiare le condizioni a regime, quindi l’analisi di questo circuito esprime il comportamento
soltanto relativamente alle condizioni di regime.
Questo circuito non è completo perché abbiamo fatto un'analisi della macchina ipotizzando di essere
lontani dalla saturazione e non prendendo in considerazione gli effetti della corrente magnetizzante.
Per ridurre le cadute della tensione magnetica e concentrarle solo sullo statore abbiamo realizzato la
macchina con materiali ferromagnetici.
5
Sullo statore abbiamo che le linee di campo si sviluppano all'interno
del ferro.
Il campo magnetico che si concatena con gli avvolgimenti di statore
produce un flusso che si evolve in maniera sinusoidale e ha una
frequenza di 50 Hz, quindi sicuramente all'interno dello statore
abbiamo delle perdite che sono le perdite per isteresi e per correnti
parassite. Per limitare queste perdite dobbiamo realizzare lo statore
seguendo le stesse procedure costruttive che abbiamo visto per i
trasformatori, bisogna eseguire una laminazione dello statore.
Il rotore vede il campo magnetico rotante con una frequenza che
risulta essere sωs, dal momento che gli scorrimenti sono molto bassi
abbiamo che le frequenza delle grandezze elettriche rotoriche sono molto basse, infatti le frequenze
risultano essere il 10% massimo 15% della frequenza nominale (circa 5Hz) Il ciclo di isteresi è le perdite
per correnti parassite sono legate alla frequenza, quindi se sono basse le frequenze saranno basse anche le
perdite e allora non ha senso realizzare i nuclei del rotore in materiale laminato.
Quindi
le
perdite
nel
ferro
sono
concentrate nella
parte
statorica. Per
modellizzare queste perdite si introduce una
resistenza in parallelo con la reattanza di
magnetizzazione.
Abbiamo dato una rappresentazione completa della macchina elettrica asincrona ed in particolare abbiamo
determinato il circuito equivalente in regime sinusoidale permanente.
Bilancio ed analisi energetica
Dall’equazione di equilibrio meccanico
j
dω m
= Te + Tm si nota che per studiare il comportamento
dt
della macchina abbiamo bisogno che lo scorrimento sia costante s = cost
ωs
− ωm
Quindi s = p
da cui si ricava che ωm= cost se s =cost
ωs
p
Allora
j
dω m
= 0 = Te + Tm
dt
⇒ Tm = −Te
Sotto queste ipotesi facciamo un analisi energetica che ci permette di valutare quale risulta essere la
potenza meccanica sviluppata dalla macchina elettrica e di individuare la coppia meccanica sviluppata.
Per fare questa analisi confrontiamo il modello energetico della macchina, definita mediante il circuito
equivalente e il modello energetico della macchina vista come una scatola
chiusa.
Quando alimentiamo la macchina nel funzionamento da motore forniamo una
potenza elettrica e eroghiamo una potenza meccanica. La potenza elettrica e
quella meccanica sono differenti a causa delle perdite che sono quelle relative
alla circolazione di corrente negli avvolgimenti di statore e di rotore, ci sono poi
le perdite nel ferro.
Pe = Pcur + Pcus + Pfe + Pm
6
Rr' ' 2
Ir
dal circuito equivalente si può vedere che Pe = ms R I + Pfe + ms
s
2
s s
Facendo un confronto si vede che c’è una corrispondenza sia per le perdite nel rame che per quelle nel
ferro, ma non riusciamo a trovare una corrispondenza per le perdite nel rame e la potenza meccanica con
un termine circuitale che le rappresenti.
r
Sappiamo che Pcu + Pm = ms
Rr' ' 2
Ir
s
'
'2
sommando e sottraendo le perdite nelle fasi di rotore m s Rr I r
si ottiene:
Rr' '2
I r − ms Rr' I r'2 + ms Rr' I r'2
s
Rr' '2
1 − s ' '2
I r − m s Rr' I r' 2 = ms
Rr I r
allora la potenza meccanica sarà Pm = ms
s
s
Pcur + Pm = ms
r
' '2
Dato che Pcu = m s Rr I r
siamo riusciti a dividere i due termini.
Dall’analisi energetica si vede che per poter scorporare la presenza di perdite nel rame di rotore e potenza
meccanica è necessario decomporre la resistenza del circuito equivalente in due termini, uno è quello
relativo agli avvolgimenti e l’altro è una resistenza fittizia che ci permette di determinare la potenza
meccanica sviluppata all’asse.
Abbiamo diviso
Rr'
in due termini, uno tiene conto delle perdite negli avvolgimenti e uno che tiene conto
s
1− s '
della conversione di energia elettrica in energia meccanica
Rr
s
Conoscendo l’espressione della potenza meccanica possiamo determinare il valore della coppia, che
abbiamo visto essere uguale alla coppia elettrica Pm = Tmω m
ωs
− ωm
ω
p
Dallo scorrimento s =
si ricava che ω m = (1 − s ) s
ωs
p
p
Sostituendo il valore di ωm nell’espressione della potenza meccanica si ricava la coppia meccanica.
Tm =
Pm
Pm
=
p
ω m ω s (1 − s )
p
p Rr' '2
1 − s ' '2
= ms
Ir
Rr I r
ω s (1 − s )
ωs s
s
Sostituendo il valore della potenza meccanica otteniamo Tm = ms
Se andiamo a considerare la potenza attiva che passa dallo statore al rotore, quindi la potenza che
attraversa il traferro abbiamo
Tm =
p
ωs
Pt
infatti
Rr' '2
Pt = Pe − P − Pfe = P + Pm = ms
Ir
s
s
cu
r
cu
(potenza al traferro o trasferita)
7
Si vede che la coppia è legata al valore dello scorrimento e al valore della corrente rotorica, a noi interessa
esprimere la coppia tramite tensioni e correnti statoriche, infatti correnti e tensioni statoriche sono le
grandezze che vengono misurate.
Riportando il ramo magnetizzante a
monte del ramo di dispersione statorico
non commettiamo un errore molto
grosso, si commette comunque un errore
di approssimazione che non è
trascurabile, otteniamo però il vantaggio
che la corrente può essere facilmente
determinata in modulo e fase e può
essere facilmente legata alla tensione Vf
I r' =
Vf
2
R'
Rs + r + xds + xdr'
s
(
2
)
sostituendo questa relazione nell'espressione della coppia si ottiene
V f2
p Rr'
Tm = ms
2
ωs s
Rr'
Rs + + (xcc )2
s
La somma delle reattanze di dispersione è indicata con xcc perché viene determinata con la prova in corto
circuito.
Se ragioniamo con una macchina collegata ad una rete di potenza prevalente abbiamo che la tensione sulla
fase è costante, allora il valore della coppia presenta come unica variabile lo scorrimento Tm(s).
Sappiamo che lo scorrimento è legato alla velocità di rotazione, quindi la coppia può essere espressa e
riportata sia in funzione dello scorrimento che della velocità di rotazione.
Il punto in cui la coppia risulta essere nulla è quello per cui non si ha interazione tra il campo di
ω
eccitazione e quello di reazione. Questa condizione corrisponde a s = ω m che si verifica per s =0
p
Il punto cui ωm = 0 presente un valore s=1 (origine del sistema di riferimento che riporta la coppia in
funzione della velocità meccanica). Dall’analisi di questa espressione si nota che quando la velocità di
rotazione è nulla c’è coppia, questo sta ad indicare che la macchina è capace di auto avviarsi.
All’alimentazione è presente una coppia costante che consente di far spuntare la macchina e di
raggiungere le condizioni di regime.
8
Perché la macchina sia nelle condizioni di equilibrio si deve realizzare l’uguaglianza tra la coppia
meccanica e quella elettrica, devono essere uguali ed opposte.
Si riporta sullo stesso grafico anche la coppia di carico e l’intersezione tra le due esprime il punto di
funzionamento a regime della macchina.
Condizioni di funzionamento della macchina asincrona
Analizziamo la macchina come una scatola chiusa e determiniamo le condizioni di funzionamento.
Funzionamento da motore
Se la nostra macchina asincrona funziona come motore deve convertire la potenza elettrica in potenza
meccanica.
Avremmo un flusso di potenza dallo statore al rotore quindi il funzionamento da motore impone che la
potenza meccanica e la potenza al traferro siano maggiori di zero.
Sappiamo che la potenza meccanica è pari a Pm = Tmω m affinché questa quantità sia maggiore di zero si
Tm < 0 ω m < 0
Tm > 0 ω m > 0
deve avere
La prima relazione Tm < 0 ωm < 0 è da scartare, infatti questa, nel funzionamento da generatore, non è
mai verificata. Avere una coppia minore di zero porta ad avere una potenza al traferro o trasferita minore
di zero Tm =
p
ωs
Pt questo va in contrasto con ciò che è stato detto prima. Una potenza trasferita minore
di zero indica un flusso di potenza che va dal rotore allo statore e questo nel funzionamento da motore è
una cosa impossibile, infatti sappiamo che la macchina in questa condizione assorbe potenza elettrica ed
eroga potenza meccanica.
Rr' ' 2
Pt > 0 ⇒ Pt = m s
Ir > 0
La seconda relazione è data da Tm > 0 quindi Tm =
ωs
s
p
9
Come si può notare in questo caso sono rispettati i reali versi delle potenze e per avere una potenza
trasferita maggiore di zero si deve avere s > 0
L’altro vincolo è dato dalla velocità meccanica ω m = (1 − s)
ωs
p
> 0 da cui si ricava 1 − s > 0 ⇒ s < 1
Analizzando le condizioni s > 0 e s < 1 si ottiene
0
1
Le condizioni sullo scorrimento sono verificate per
macchina funziona da motore.
0< s <1 e per questo tratto della caratteristica la
Funzionamento da generatore
Con il funzionamento da generatore la macchina assorbenza potenza meccanica ed eroga una potenza
elettrica.
Nel caso del generatore la situazione è invertita, infatti il flusso di potenza andrà dal rotore allo statore e
quindi si dovrà avere una potenza meccanica e una potenza trasferita minore di zero (Pt<0 e Pm<0)
ugualmente si avrà una potenza elettrica negativa (Pe<0).
Tm > 0 ω m < 0
Tm < 0 ω m > 0
Questo si ottiene per
la prima condizione Tm > 0 ω m < 0 è sicuramente da
scartare, infatti una coppia positiva porta a una potenza trasferita positiva. Questo va in contrasto con un
funzionamento della macchina da generatore, infatti una potenza trasferita maggiore di zero indica un
passaggio di potenza dallo statore al rotore impossibile in questo tipo di funzionamento.
La seconda relazione è data da Tm < 0 quindi Tm =
p
ωs
Pt < 0 ⇒ Pt = ms
Rr' '2
Ir < 0
s
Come si può notare in questo caso sono rispettati i reali versi delle potenze.
Per avere una potenza trasferita minore di zero si deve avere s < 0
L’altro vincolo è dato dalla velocità meccanica ω m = (1 − s)
ωs
p
> 0 da cui si ricava 1 − s > 0 ⇒ s < 1
Si ottiene che la condizione per cui il funzionamento della macchina risulta essere da generatore si ha per
uno scorrimento minore di zero s < 0
Funzionamento da freno elettromagnetico
C’è una condizione in cui la potenza elettrica è entrante Pe >0 e anche la potenza meccanica viene fornita
alla macchina Pm< 0
10
Stiamo applicando sia energia meccanica che elettrica che si trasformano in calore, questa è una
condizione particolare in cui stiamo frenando la macchina. L’energia elettrica viene utilizzata per
contrastare l’energia meccanica. Questo tipo di funzionamento è solo transitorio, infatti le potenze entranti
vengono convertite in perdite nel rame, questo tende a riscaldare la macchina e soprattutto gli
avvolgimenti.
Una potenza elettrica maggiore di zero ci fa capire che sicuramente si deve avere una potenza trasferita
maggiore di zero Pe > 0 ⇒ Pt > 0 Ma la condizione potenza al traferro maggiore di zero indica che lo
Rr' '2
Ir > 0 ⇒ s > 0 .
scorrimento deve essere maggiore di zero Pt = m s
s
Questa è la prima condizione, la seconda ci obbliga ad avere una potenza meccanica minore di zero,
Tm < 0 ω m > 0
Tm > 0 ω m < 0
quindi
La prima condizione Tm < 0 ωm > 0 porta a una potenza al traferro negativa, questo va in contrasto con
ciò che abbiamo detto in precedenza quindi questa condizione va scartata.
La condizione Tm > 0 ω m < 0 presenta una potenza al traferro positiva e analizzando l’espressione della
ωs
< 0 ⇒ s >1
p
La potenza meccanica è minore di zero e la potenza al traferro è maggiore di zero, si ricava che la
condizione di freno elettromagnetico si verifica per s >1
velocità meccanica si ottiene ω m = (1 − s )
Se la macchina risulta essere iposincrona la macchina funziona da motore, se risulta essere ipersincrona
funziona da generatore.
Analisi delle caratteristiche meccaniche della macchina
Spunto della macchina asincrona
L'analisi della caratteristica meccanica mette in evidenza che a velocità nulla e con la macchina collegata
ad una rete di potenza prevalente, la coppia elettromagnetica sviluppata dalla macchina risulta essere
costante e risulta essere diversa da zero (condizione caratteristica delle macchina elettrica asincrona).
Applicando tensione ad una macchina elettrica inerte, dopo un primo periodo di magnetizzazione, la
macchina sviluppa una coppia elettromagnetica costante e diversa da zero, questo consente alla macchina
di avviarsi. Questa proprietà rende la macchina elettrica asincrona una macchina auto avviante, che gli
consente di sviluppare una coppia anche a velocità nulla, anche in presenza di un carico la macchina ha la
11
capacità di auto avviarsi.
Questo si può mettere in evidenza confrontando la caratteristica meccanica della macchina e la
caratteristica di un carico applicato sulla macchina elettrica asincrona. Prendiamo come riferimento un
carico di tipo quadratico o cubico. Nelle
condizioni di spunto, cioè quando la velocità
risulta essere uguale a zero, l'equazione di
equilibrio meccanico è tale per cui la
macchina riesce comunque ad accelerare e a
portarsi fino alla condizione di funzionamento
a regime caratterizzata dall'intersezione delle
due caratteristiche.
Facendo un'analisi dal punto di vista
meccanico ( equazione d’Alambert)
dω m
= Te + Tm
per ω = 0 si ha
dt
dω
j m
= Te (0) + Tm (0)
dt ω =0
j
L'accelerazione della macchina allo spunto risulta essere connessa alla differenza tra la coppia elettrica e
la coppia meccanica nell'istante in cui la velocità risulta essere nulla ω=0, cioè risulta essere connesso al
differenziale tra la coppia elettromagnetica sviluppata dalla macchina e la coppia di carico. Tanto
maggiore risulta essere la coppia allo spunto, tanto maggiore sarà l'accelerazione e tanto minore sarà il
transitorio meccanico che ci porterà a raggiungere la condizione di funzionamento a regime.
Dal punto di vista elettrico avere un transitorio breve è importante perché nella condizione di scorrimento
unitario (condizione di rotore bloccato) le correnti circolanti nella macchina sono particolarmente elevate,
queste correnti tendono a diminuire con il diminuire dello scorrimento, quindi far durare il meno possibile
la fase di acceleramento vuol dire far durare il meno possibile le sovracorrenti dovute allo spunto.
Punti di stabilità
Vediamo quali sono i punti di funzionamento stabile per la macchina, nei quali la macchina per ogni
perturbazione tende a reagire in modo tale che si raggiunga una nuova condizione di equilibrio. In
particolare analizziamo due condizioni che possono essere considerate simmetriche.
Consideriamo una caratteristica di carico che risulta essere di tipo rettilineo e analizziamo i possibili punti
di funzionamento della macchina. Sappiamo che a regime
la velocità deve essere costante e l'accelerazione nulla,
quindi la coppia meccanica ed elettromeccanica devono
essere uguali, dal punto di vista grafico queste condizioni si
determinano analizzando l'intersezione tra la caratteristica
della coppia di carico e la caratteristica elettromeccanica,
quindi i punti di intersezione sono il punto A e il punto B.
Per verificare la stabilità dei due punti dobbiamo applicare
una perturbazione meccanica e dobbiamo vedere se la
reazione del sistema elettrico risulta essere tale da
compensare il disturbo e riportare il sistema elettrico in una
condizione di equilibrio.
Nell'istante t = 0 in A abbiamo che la velocità sarà ωa e la coppia meccanica in A risulta essere uguale ed
opposta alla coppia elettromeccanica. Applichiamo un incremento di coppia ∆Tm l'equazione di equilibrio
meccanico diventa : j
dω m
= Te ( A) + Tm ( A) + ∆Tm
dt
Siamo nella zona di funzionamento da motore, quindi la coppia
12
elettromagnetica risulterà essere positiva e quella meccanica negativa.
La coppia elettromagnetica è quella che tende ad accelerare la macchina mentre la coppia meccanica è
quella che tende ad opporsi e avrà un verso opposto a quello della velocità di rotazione.
Quindi j
dω m
= Te ( A) − Tm ( A) − ∆Tm
dt
Se Te(A) e Tm(A) sono uguali ed opposte si vede che ad una perturbazione positiva
della coppia meccanica corrisponde una decelerazione.
Se io incremento la coppia meccanica la macchina tende a
frenare e con una decelerazione abbiamo una riduzione della
velocità. Sulla caratteristica elettromeccanica ad una riduzione
della velocità corrisponde una riduzione della coppia
elettromagnetica Te, il differenziale di coppia tende ancora ad
aumentare e a diventare ancora più negativo, quindi la macchina
tende ulteriormente a decelerare fino a passare nella condizione
di freno. Quindi questa non è una condizione di funzionamento
stabile.
Facciamo un discorso opposto, quindi invece che avere un
incremento di coppia abbiamo una riduzione di coppia
meccanica. Con una riduzione di coppia la macchina tende ad
accelerare, infatti ad un aumento di velocità corrisponde un aumento della coppia elettromagnetica e la
macchina tende ad accelerare finché non raggiunge una nuova condizione di equilibrio.
Quindi con un incremento di coppia meccanica la macchina tende ad decelerare e si porta in una
condizione di funzionamento da freno senza mai raggiungere una nuova condizione di equilibrio stabile,
dall'altra parte invece la macchina tende ad accelerare fin quando non si porta ad una nuova condizione di
equilibrio che corrisponde al punto B. Sicuramente il punto A non è una condizione di equilibrio stabile
perché a qualunque perturbazione il sistema si allontana da questo punto senza mai più ritornarci.
Facciamo lo stesso discorso per il punto B.
Ipotizziamo di applicare un
∆Tm positivo, cioè
aumentiamo la coppia meccanica applicata all’asse in
senso opposto alla velocità di rotazione. Ad un aumento
di coppia di carico corrisponde una decelerazione, alla
quale corrisponde un aumento della coppia
elettromagnetica.
Quindi con un aumento della coppia di carico abbiamo
che l'effetto risulta essere quello di produrre come
reazione una coppia elettromagnetica che risulta essere
uguale ed opposta alla variazione di coppia meccanica,
quindi tende a riportare la macchina in una nuova
condizione di equilibrio. Cambiamo il verso e
ipotizziamo di ridurre la coppia di carico, a questo punto si ottiene una accelerazione della macchina alla
quale corrisponde una riduzione della coppia elettromagnetica, questa diminuzione si svilupperà fino a
quando la riduzione della coppia elettromagnetica non compenserà la riduzione della coppia di carico.
Quindi nonostante i due punti siano ottenuti dall'intersezione della coppia di carico con la caratteristica
elettromagnetica, che mi verificano l’equazione di equilibrio meccanico, abbiamo che il primo il punto A
è un punto di funzionamento instabile, l'altro il punto B è un punto di funzionamento stabile.
La condizione di stabilità è determinata essenzialmente da come la coppia elettromagnetica evolve in
funzione della velocità. Nel punto A si vede che ad una variazione di coppia corrisponde una variazione
positiva di velocità e ad una diminuzione di coppia corrisponde una diminuzione di velocità. Quindi dove
la derivata di coppia rispetto alla velocità risulta essere positiva il comportamento risulta essere instabile,
invece dove la derivata risulta essere negativa il comportamento risulta essere stabile. Se ad una
variazione positiva di coppia di carico corrisponde una variazione negativa di velocità abbiamo che ad
ogni disturbo corrisponde una reazione uguale e contraria, invece se ad una variazione positiva di velocità
13
corrisponde una variazione negativa di coppia abbiamo una condizione di funzionamento instabile. In
conclusione la macchina funziona in condizione di stabilità soltanto nei punti compresi tra le coppie
massime in cui la derivata risulta essere negativa. Gli altri punti dalla caratteristica rappresentano soltanto
dei punti di funzionamento teorico. Per questo motivo talvolta viene rappresentata la caratteristica soltanto
all'interno delle coppia di rovesciamento gli altri punti non vengono riportati.
Coppie di rovesciamento
La caratteristica meccanica presenta un altro punto
caratteristico che è quello in cui la coppia meccanica risulta
essere massima. Si nota che questi due punti risultano
essere quasi simmetrici. Questi punti prendono il nome di
coppie di rovesciamento. Particolarmente importante
risulta essere il legame che sussiste tra lo scorrimento e le
due coppie di rovesciamento una relativa al funzionamento
da motore l'altra relativa al funzionamento da generatore.
Questi due punti di coppia massima individuano una zona
in cui la pendenza della caratteristica risulta essere
relativamente elevata, sono i punti nei quali si ha
intersezione tra le caratteristiche di funzionamento della
macchina e del carico, questa zona è anche caratterizzata da una caratteristica di tipo lineare con pendenza
negativa.
Individuiamo i valori di scorrimento per i quali si ha la coppia di rovesciamento.
Per fare questo utilizziamo una formula semplificata della coppia, si ipotizza di trascurare il termine Rs
rispetto a Rr/s, questo perché nelle condizioni di funzionamento stabile la caratteristica della macchina ha
una pendenza molto forte, questo vuol dire che nelle condizioni di funzionamento a regime lo scorrimento
risulta essere prossimo allo zero, allora Rr/s>>Rs Quindi l’espressione della coppia sarà
V f2
Rr' V f2 s
p Rr'
p
Te ≅ m f
= mf
ωs s R ' 2
ω s Rr'2 + (sxcc )2
2
r
+ xcc
s
Derivando rispetto a s ed eguagliando a zero si ottiene
[
2
2
]
[
2
]
'2
'
2
'2
'
2
dTe
p Rr + (sxcc ) − 2(sxcc ) RrV f
p Rr − (sxcc ) RrV f
= mf
= mf
=0
2 2
ds
ωs
ω s Rr'2 + (sxcc )2 2
Rr'2 + (sxcc )
[
14
]
[
]
'2
La derivata sarà nulla quando Rr − (sxcc ) = 0 ⇒ s = ±
2
Rr' 2
Rr'
=
±
xcc2
xcc
La coppia massima si ottiene per valori di scorrimento pari a ± R’r/xcc
Il valore di coppia e scorrimento positivo corrisponde al funzionamento
da motore mentre quella negativa corrisponde al funzionamento da
generatore.
Se sostituiamo il valore dello scorrimento otteniamo che la coppia vale:
Rr'
RV
xcc
'
r
2
f
1 Vf p 1 p Vf
Cˆ = m f
=
=
2
2
ω s '2 R '
ω
2
x
8
π
l
cc
s
dcc f
Rr + r xcc
xcc
p
2
2
Vediamo quindi che la coppia massima è legata a tre parametri: Vf ; f ; ldcc
In particolare se alimentiamo in maniera tale che il rapporto tra la tensione e la frequenza risulti essere
costante il valore della coppia massima non cambia. La coppia massima presente nella caratteristica risulta
essere una grandezza che dipende solo dalla tensione massima dalla frequenza e in minor misura
dell'induttanza di dispersione di cortocircuito.
Una volta stabiliti il valore della tensione e della frequenza possiamo considerare la coppia di
rovesciamento una grandezza costante.
Potenza trasmessa
Ci interessa rendere la pendenza della caratteristica più elevata possibile nella zona di funzionamento
stabile.
Abbiamo visto che la coppia elettromeccanica risulta essere
Te =
p
ωs
Pt ⇒ Pt =
ωs
p
Te
Da un punto di vista energetico sappiamo che la potenza meccanica risulta essere:
Pm = Teω m = Te (1 − s )
Dove Pt = ms
ωs
p
= Pt (1 − s ) = Pt − sPt
Rr' ' 2
I r è la potenza trasmessa e sPt = m s Rr' I r' 2 = Pcu corrisponde alle perdite nel rame.
s
La potenza meccanica è quindi data dalla differenza tra la potenza trasmessa e le perdite nel rame. La
potenza meccanica è strettamente collegata alla potenza trasmessa e la potenza trasmessa risulta essere
strettamente collegata allo scorrimento, quindi tanto più piccolo risulta essere lo scorrimento tanto
maggiore risulta l'aliquota di potenza trasmessa che viene convertita in potenza meccanica.
Questo ci mette in evidenza che per poter massimizzare il rendimento della macchina bisognerà far
funzionare la macchina in condizione di scorrimento prossimo allo zero, in modo che la maggior aliquota
di energia venga trasformata in potenza meccanica, dobbiamo quindi fare in modo che costruttivamente la
pendenza della caratteristica meccanica risulti essere molto forte. Si ottengono questi risultati scegliendo
opportunamente il rapporto tra la resistenza di rotore e la reattanza cortocircuito.
Da un punto di vista costruttivo si può dimostrare che calcolando derivata della coppia rispetto allo
scorrimento in funzione delle rapporto R’r/xcc si ricava che per massimizzare il valore di tale pendenza
bisogna ottimizzare proprio il rapporto R’r/xcc.
Si nota che andando ad analizzare l'incremento della coppia al variare della resistenza rotorica c'è una
condizione di ottimo oltre la quale non si può andare. Visto che la reattanza di dispersione è un parametro
che non si può modificare perché dipenderà da come sono fatte le cave della macchina, si va a regolare il
valore della residenza di cortocircuito in maniera tale che la pendenza della macchina in condizione di
funzionamento stabile sia la più elevata possibile.
15
Vediamo quale risulta essere il punto di funzionamento nominale della macchina. Dobbiamo, tra i punti di
funzionamento stabile, scegliere quello che risulta essere il punto di funzionamento continuativo dalla
macchina. Non possiamo scegliere come punto di funzionamento nominale la coppia di rovesciamento,
perché per una piccola perturbazione si potrebbe passare nelle condizioni di instabilità, si sceglie un punto
intermedio al 50% della coppia di rovesciamento.
COPPIA ALLO SPUNTO
Aumento della coppia allo spunto tramite la regolazione della tensione applicata
V f2
p Rr'
2
La coppia elettromeccanica risulta essere Te = m f ω s
s
Rr'
Rs + + ( xcc )2
s
Allo spunto si ha:
Te (1) = m f
p
ωs
'
r
R
V f2
(R
s
+ Rr'
2
2
) + (x )
cc
Da questa relazione si vede che la coppia elettromagnetica allo spunto dipende dalla tensione con legge
quadratica. Se passiamo da un collegamento a stella a un collegamento a triangolo abbiamo sulla fase di
ogni avvolgimento una tensione che risulta essere radice di tre volte superiore, infatti Vc= √ 3 Vf
Il valore della coppia allo spunto aumenta quindi di tre volte. Questo porta dei benefici ma anche a uno
svantaggio.
Se aumentiamo la tensione di alimentazione nelle condizioni di rotore bloccato (cioè s = 1), otteniamo un
aumento della corrente rotorica che è responsabile dell'aumento della coppia elettromagnetica.
Provochiamo però anche un aumento della corrente magnetizzante, perché applichiamo sul ramo
magnetizzante una tensione che risulta essere radice di tre volte maggiore, questo determina un aumento
complessivo della corrente sullo statore.
Se la macchina è stata progettata per funzionare con un collegamento a stella il campo magnetico presente
al traferro è legato al valore della tensione di fase Vf = E =ω NsΦ e il flusso uscente dal polo è
direttamente proporzionale all’induzione presente al traferro. Aumentando la tensione si porterà la
macchina a lavorare in condizioni di campo al traferro che potrebbero essere superiori rispetto hai valori
di campo consentiti, si potrebbero anche raggiungere le condizioni di saturazione del ferro, quindi delle
deformazioni del campo magnetico al traferro e della corrente magnetizzante. In questo caso la corrente
magnetizzante è dello stesso ordine di grandezza della corrente rotorica, quindi la corrente a vuoto non è
più trascurabile. Passare dalla condizione di non saturazione ad una condizione di saturazione deforma la
corrente che alimenta la macchina. Quindi passando da un collegamento a stella ad un collegamento a
triangolo bisogna essere sicuri che la macchina elettrica asincrona consenta quel genere di funzionamento.
Si potrebbe passare da una connessione a stella ad uno connessione a triangolo per aumentare la coppia
quando si è prossimi alle condizioni di funzionamento a regime, non si fa mai il contrario.
Aumento della coppia allo spunto tramite la regolazione della resistenza rotorica
L'unico parametro sul quale possiamo agire per fare la regolazione della coppia è la resistenza rotorica.
Per capire se bisogna aumentarla o diminuirla bisogna andare a vedere come varia la coppia
16
elettromagnetica al variare di tale resistenza ed in particolare vedere la derivata dalla coppia
elettromagnetica rispetto alla resistenza rotorica. Si deve capire se ad una variazione della resistenza
corrisponde un incremento o un decremento della coppia.
p
Te (1) = m f
'
r
R
ωs
V f2
(R
s
+ Rr'
2
2
) + (x )
cc
Per semplificare i calcoli ipotizziamo che Rs e Rr siano uguali.
Te = m f
p
ωs
R
'
r
V f2
2
2
4 Rr' + ( xcc )
Derivando si ottiene:
[
2
]
2
[
2
]
(xcc ) − 4 Rr'2
dTe
p 2 4 Rr' + ( xcc ) − 8 Rr'2
=
m
V
=
K
f
f
2
2
2
2
2
2
dRr'
ωs
4 Rr' + (xcc )
4 Rr' + (xcc )
(
Vediamo quando la funzione è crescente o decrescente
(
2
La quantità a denominatore 4 Rr' + ( xcc )
(xcc )2
2
)
(
)
2
)
è sempre positiva, quindi dobbiamo analizzare il numeratore
x
x
− 4 Rr'2 ≥ 0 risolvendo si ottiene ( xcc − 2 Rr' )( xcc + 2 Rr' ) ≥ 0 ⇒ Rr' ≥ − cc ; Rr' ≤ cc
2
2
- xcc/2
xcc/2
Abbiamo un incremento della coppia allo spunto all'aumentare della resistenza fino a che questa risulta
essere pari a xcc/2, se aumentiamo ulteriormente abbiamo un decremento della coppia. Questo risultato lo
si poteva ottenere anche analizzando le evoluzioni della caratteristica di coppia al variare della resistenza
di rotore.
Se aumentiamo il valore della resistenza rotorica il valore dello scorrimento per cui la coppia risulta essere
massima s = ±
Rr'
si sposta mentre il valore della coppia massima rimane invariato, perché questa non
xcc
1 p Vf
dipende dalla resistenza rotorica ma dalla frequenza e dall'induttanza di cortocircuito Cˆ =
8 π 2 l dcc f
2
La caratteristica meccanica al variare della resistenza rotorica varia in questo modo.
Il valore di scorrimento per cui si ha la coppia massima si sposta mentre il valore della coppia massima
17
rimane invariato.
La coppia allo spunto tende via via ad aumentare fino a quando lo scorrimento per cui sia ha la coppia
massima raggiunge il valore pari ad 1 dopo di ché se continuiamo a spostare lo scorrimento avremo che le
caratteristiche portano ad una progressiva diminuzione della coppia allo spunto.
Rr'
=1
La condizione per la quale la coppia risulta essere massima da questa analisi grafica risulta essere
xcc
(l'errore che abbiamo commesso è legato all'approssimazione eccessiva Rs = Rr).
Sulla base di queste considerazioni sono state in passato inventati
dei metodi che servivano per regolare la coppia allo spunto.
Quando si voleva aver allo spunto una coppia pari a quella di
rovesciamento si inserivano in serie agli avvolgimenti di rotore
delle resistenze aggiuntive tali per cui risultava Rr =xcc, poi
progressivamente si cortocircuitavano pezzi di resistenza in modo
da passare da una caratteristica all'altra man mano che la
macchina spuntava. Si ottenevano delle coppie che risultavano
essere particolarmente elevate e pressoché costanti, ottenendo
così un'accelerazione costante.
Questo metodo è caratterizzato da elevate perdite perché ci sono
resistenze aggiuntive e inoltre la macchina funziona con valori di scorrimento elevati, non è quindi un
metodo efficiente.
Aumento della coppia allo spunto tramite la regolazione della frequenza
Un altro metodo che viene utilizzato per l'aumento della coppia allo spunto è la regolazione della
frequenza.
Te (1) = m f
p
ωs
'
r
R
V f2
(R
2
s
2
+ Rr' ) + (xcc )
Questa ci esprime il valore della coppia allo spunto.
Dal momento che la macchina è collegata ad una rete di potenza prevalente si avrà un valore della
tensione e della frequenza che risultano essere costanti. Per cercare di controllare la frequenza dobbiamo
interporre fra la rete di alimentazione e la macchina asincrona un dispositivo che ci consenta di svincolarci
da ωs per far si che la ω applicata al motore sia diversa da quella della rete. Questo dispositivo è un
convertitore elettronico (inverter). Questo converte la tensione da alternata in continua e poi di nuovo da
continua in alternata lasciando liberi i valori di tensione e frequenza che possono essere controllati da noi.
Useremo uno schema di questo tipo:
Esplicitando l’espressione della pulsazione la coppia allo spunto assume questa espressione
p
Te (1) = m f
2π f
R +R
Possiamo trascurare il termine s 2
f
'
r
18
R
'
r
V f2
R + R '
f s 2 r
f
2
2
2
+ 4π 2ldcc
Vf
R
Quindi Te (1) = m f
2π f f
p
'
r
2
1
2 2
4π l dcc
La coppia risulta essere funzione solo della frequenza e della quantità (V/f).
Se diminuiamo la frequenza e facciamo in modo che il rapporto (V/f) rimanga costante notiamo che il
valore della coppia allo spunto tende ad aumentare.
Questo tipo di controllo viene chiamato controllo statico o scalare.
La condizione V/f costante corrisponde ad una condizione fisica abbastanza semplice
Dato che Vf = ω Ns Φ Allora V/f = 2 π Ns Φ
Manteniamo il flusso uscente da un polo costante.
Variando la velocità del campo magnetico istantaneo determiniamo a parità di potenza erogata un
aumento della coppia
Pm = Tm (1 − s )
ω
Questo fenomeno si capisce bene dal grafico, infatti stiamo
p
spostando la caratteristica di coppia. Sappiamo che la coppia avrà un valore nullo al sincronismo
2π f
ma dato che noi possiamo controllare la frequenza siamo capaci di spostare il punto d’incontro
ωm =
p
della caratteristica di coppia con l’asse delle velocità, spostando quindi l’intera caratteristica di coppia.
Tramite il controllo elettronico della tensione e della frequenza, se si tiene costante il rapporto Vf/f si
1 p Vf
vede che la coppia massima non cambia Cˆ =
8 π 2 l dcc f
2
mentre varia lo scorrimento per cui la
Rr'
Rr' 1
=±
questo perché tutta la caratteristica viene traslata.
coppia è massima s = ±
xcc
2πl dcc f
Questo metodo sicuramente è energicamente più conveniente rispetto al caso precedente.
Altri metodi di relazione della coppia si basano su una modifica della struttura della macchina.
Macchina elettrica asincrona a gabbia di scoiattolo
L'avvolgimento rotorico è costituito da sbarre di rame o di un altro materiale conduttore posto nelle
apposite cave del rotore e collegate tra loro da due anelli dello stesso materiale, in modo tale da
cortocircuitarle.
Questa è una sezione del rotore rispetto all’asse di rotazione.
Dobbiamo analizzare qual’è la tensione indotta su ciascuna di queste sbarre tenendo conto che la
macchina ruota ad una velocità generica ωm e l'avvolgimento statorico è alimentato da una terna di
correnti simmetriche sfasate l'una rispetto all'altra di 120 gradi. Noi possiamo ricavare la tensione indotta
19
su ciascuna sbarra utilizzando la relazione e=lvB
Dove v è la velocità con quelle sbarre tagliano il campo magnetico, l è la lunghezza delle sbarre e B il
valore del campo.
Il calcolo di e, dovrà essere fatto relativamente ad ogni sbarra, dobbiamo fissare un sistema di un
riferimento, numeriamo le sbarre e prendiamo la prima come punto di riferimento
Le sbarre saranno uniformemente distribuite sulla superficie di rotore che si affaccia al traferro è saranno
sfasate l'una rispetto all'altra di un angolo βc.
Il campo prodotto dallo statore è:
Bs (α , t ) = Bˆ s cos(ωs t − pα )
Se lo stesso campo lo vediamo dal punto di vista rotorico sarà:
Bs ( β , t ) = Bˆ s cos(sω s t − pβ )
Un osservatore posto sul sistema di riferimento rotorico vede un campo magnetico rotante che ruota ad
una velocità sωs/p.
sω s
p
La velocità periferica con cui il campo taglia ciascun conduttore sarà v =
R
Dove R è il raggio del rotore
Riferendoci alla prima barra abbiamo il campo Bs relativo alla posizione β= 0 uguale a
sω s
Bs (0, t ) = Bˆ s cos(sω s t ) allora la tensione indotta sarà e0 (t ) = l
p
ˆ
RBs cos(sω s t )
Sulla seconda barra abbiamo che il campo relativo alla posizione β= βc è pari a
sω s ˆ
RBs cos(sω s t − β c )
Bs ( β c , t ) = Bˆ s cos(sω s t − β c ) allora la tensione indotta sarà e1 (t ) = l
p
Sulla barra iesima abbiamo che il campo relativo alla posizione β= iβc è pari a
sω s ˆ
RBs cos(sω s t − iβ c )
Bs (iβ c , t ) = Bˆ s cos(sω s t − iβ c ) allora la tensione indotta sarà ei (t ) = l
p
Se voglio esprimere la tensione indotta tramite il flusso si moltiplica e divido per 2/π quindi prendendo
per esempio la prima cava e0 (t ) =
Dato che
2 lRπ
sω Bˆ cos(sω s t )
π 2p s s
2 ˆ
lRπ
Bs = Bs è il campo medio sotto un polo e che
π
2p
è la superficie di un polo, otteniamo
e1 (t ) = φ p sω s Bˆ s cos(sω s t ) in modo identico si ricavano le tensioni indotte delle altre fasi.
20
Sul sistema di sbarre sotto la coppia polare viene indotta un sistema di tensione sfasato tutto della stessa
quantità, quindi abbiamo un sistema di tensioni indotte di tipo simmetrico.
Se abbiamo una sistema di sbarre cortocircuitate sul quale viene indotta un sistema di tensione
simmetrico, si produrrà un sistema di correnti simmetrico, che produrranno un campo magnetico che si
opporrà alla causa che lo ha generato.
In conclusione si può dire che su ciascuna di queste sbarre si costituisce una vera e propria fase, perché le
tensioni sono sfasate l'una rispetto all'altra di una quantità costante quindi il numero di fasi prodotte sarà
esattamente uguale al numero di sbarre infisse sotto la coppia polare, ecco perché la macchina asincrona a
gabbia di scoiattolo è una macchina polifasica. Se variamo il numero di poli sullo statore la macchina
automaticamente riconfigura il numero di fasi in modo tale da produrre sempre un campo magnetico di
reazione che abbia lo stesso numero di copie polari del campo di eccitazione. Questo vantaggio della
macchina asincrona a gabbia di scoiattolo, che risulta essere abbastanza semplice da realizzare, è
affidabile e meccanicamente robusta, non abbiamo il problema di dover costruire gli avvolgimenti perché
le fasi coincidono con una sbarra sola, la struttura è anche economica.
La macchina elettrica a gabbia di scoiattolo presenta delle caratteristiche meccaniche che sono identiche a
quelle della macchina con rotore avvolto.
Macchina asincrona a doppia gabbia
Il concetto su cui si basa questo tipo di machina è quello di utilizzare le gabbie in maniera selettiva. Allo
spunto si usa la gabbia con una resistenza più elevata, questo ci permette di avere una coppia maggiore e a
regime la gabbia con la resistenza più bassa per limitare le perdite, il cambiamento di gabbie viene
realizzato in maniera automatica.
Quando la macchina è nella condizione di rotore bloccato, cioè S =1, le frequenze delle tensioni e delle
correnti rotoriche risultano essere uguali alle frequenze statoriche, progressivamente come la macchina
passa dalla condizione di rotore bloccato alla condizione di macchina in avviamento, la velocità ωm tende
a crescere e lo scorrimento tende a diminuire, le frequenze di rotore tendono a loro volta a diminuire
ωr = s ωs. L'elemento di commutazione è proprio la frequenza, bisogna fare in modo che al diminuire della
frequenza una delle due gabbie venga completamente disalimentata.
Per fare questo si utilizza un elemento caratteristico dell'avvolgimento rotorico che dipende dalla
frequenza, l'unico elemento rotorico collegato alla frequenza è la reattanza di dispersione pari a sωsld,
questo è l'unico elemento sul quale si può agire per differenziare in maniera molto forte il valore della
reattanze di dispersione sulle due gabbie dell'avvolgimento rotorico.
Si procede in modo geometrico, si costruiscono le gabbie in modo che le reattanze di dispersione rotoriche
risultino essere completamente differenti.
L'induttanza di dispersione risulta essere definita dal rapporto tra il flusso concatenato con l'avvolgimento
e la corrente che circola nell' avvolgimento. In questo caso abbiamo che il flusso concatenato con una fase
risulta essere il flusso concatenato con una sbarra, per poter analizzare il flusso di dispersione sarà
sufficiente analizzare il flusso che si disperde all'interno del sistema.
21
Analizziamo prima la barra 2
Il flusso di dispersione risulta essere collegato alla
superficie che viene abbracciato dalle delle linee del
flusso, si vede che tanto più profonda risulta essere la
barra tanto maggiore sarà l'aliquota del flusso di
dispersione quindi tanto maggiore sarà il coefficiente di
autoinduzione di dispersione. La barra 2 rispetto la
barra 1 presenterà un numero di linee di dispersione
maggiore per cui un coefficiente di autoinduzione di
dispersione superiore ldr2 >>ldr1
Quindi, quanto più profonda risulta essere la barra e
quanto maggiore risulta essere la superficie che viene
attraversata da queste linee di flusso, tanto maggiore
sarà la differenza tra i due coefficiente di
autoinduzione. Quindi la geometria con cui vengono
realizzate da barre influisce sulla differenza tra le
induttanze di dispersione.
Analizziamo le due barre
Allo spunto abbiamo che la forte differenziazione tra le induttanza farà sì che il valore della reattanze
poste sui due rami risulterà essere completamente differente. La barra più profonda sarà caratterizzata da
una reattanza maggiore rispetto a quella della barra più esterna.
Sappiamo che, a parità di tensione, se le reattanze sono diverse
saranno differenti anche i valori delle correnti e in particolare avremo
che la corrente circolante nella barra 1 sarà maggiore rispetto a quella
circolante nella barra 2.
Si fa in modo di avere una Rr1 >> Rr2 dal momento che la corrente
circola prevalentemente nella barra 1 la coppia sviluppata all'asse
sarà quella relativa alla resistenza della barra 1, la coppia sarà quindi
maggiore di quella relativa alla barra 2.
Si fa in modo che allo spunto la reattanza sia prevalente rispetto alla
resistenza e che la corrente circoli nella barra 1, quindi la macchina
risulti essere caratterizzata da un elevato valore di resistenza di rotore e quindi da un alto valore di coppia
allo spunto. Con l'aumento della velocità il valore della pulsazione di rotore tende a diminuire perché
diminuisce il valore dello scorrimento, se diminuisce il valore della pulsazione diminuisce il peso della
reattanza rispetto alla resistenza, a frequenze prossime al valore di funzionamento nominale avremo che il
valore della reattanze sarà trascurabile rispetto a quello delle resistenze, quindi la corrente tenderà a
circolare dove la resistenza risulterà essere più bassa, cioè nella barra più interna.
In questo modo si riesce ad avere allo spunto una elevata coppia
mentre a regime si hanno coppie inferiori, con maggiori valori di
rendimento dal momento che la resistenza della barra più interna è
minore rispetto a quella della barra 1, quindi ci saranno minori
perdite.
Con ciò si ottengono delle caratteristiche di coppia meccaniche che
risultano essere quasi piatte.
La coppia allo spunto e la coppia di rovesciamento risultano essere
particolarmente vicine, e la pendenza in prossimità della coppia di
rovesciamento è particolarmente elevata.
Rotore a barre profonde
Lo stesso stratagemma si può utilizzare impiegando un'unica barra
sviluppata in profondità. In questo caso si utilizza un fenomeno fisico
22
chiamato fenomeno di diffusione. In virtù della variazione di frequenza si realizza una distribuzione della
corrente nella barra che risulta essere diversa in funzione della profondità, in particolare per frequenze alte
la corrente si concentra nella parte superiore della barra dove la resistenza risulterà essere più alta, con il
diminuire delle frequenze la corrente tende a distribuirsi su tutta la barra e la resistenza tende a diminuire
perché la superficie utile risulta essere maggiore. In questa maniera si ha una variazione della resistenza di
rotore al variare dello scorrimento. Il vantaggio della doppia barra rispetto alla barra profonda sta nella
maggiore facilità costruttiva.
Funzionamento da generatore
Attualmente le macchine elettriche asincrone vengono utilizzate sempre più frequentemente come
generatori, questo perché sono facilmente regolabili, gestibili, affidabili e non hanno bisogno di una
manutenzione periodica.
Per il funzionamento da generatore devono sempre essere realizzate con il rotore avvolto, questo perché
vengono alimentate sia dallo statore che dal rotore.
Il funzionamento da generatore impone che i morsetti di statore siano
collegati alla rete, allora la frequenza di statore è fissa e la frequenza di
rotore risulta essere legata allo scorrimento se alimentiamo la macchina
attraverso un dispositivo elettronico con un sistema di tensione tale che
per quella frequenza risulta essere ωs il generatore di tensione riportato
sullo statore sarà sincrono con quello di rotore.
Quindi si ha lo statore collegato ad una rete di potenza prevalente e il
rotore connesso all'esterno mediante delle spazzole che lo collegano a un
dispositivo di conversione elettronico, un inverter, che converte la
tensione di alimentazione e fa in modo che la tensione applicata risulti essere ad una frequenza sωs, in
questo modo abbiamo che la tensione applicata al rotore risulterà avere la stessa frequenza, riportata
sull'avvolgimento statorico, della tensione applicata sullo statore. Avendo un generatore di tensione posto
sul rotore si può controllare in modulo e fase il valore della corrente rotorica e quindi far in modo che la
corrente magnetizzante venga fornita dall'avvolgimento rotorico, quindi la potenza attiva erogata sullo
statore risulti essere quella relativa al processo di conversione energetica dell'energia meccanica in
elettrica e la potenza reattiva risulti essere esattamente uguale a zero.
Alimentiamo con una frequenza che risulta essere collegata alla velocità di rotazione in modo tale da
avere un funzionamento simile a quello della macchina elettrica sincrona, in questo caso l'avvolgimento
rotorico esercita le stesse funzioni che esercitava il circuito di eccitazione della macchina elettrica
sincrona.
Usando questa tipologia di alimentazione praticamente si fa in modo che la macchina elettriche asincrona
venga fatta funzionare in regime di velocità variabile con un funzionamento analogo a quello della
macchina elettrica sincrona con l'erogazione di sola potenza attiva ed un annullamento quasi totale della
potenza reattiva erogata.
Questo tipo di macchina ha avuto notevole successo negli aereo generatori perché possiamo convertire
l'energia meccanica prodotta dal vento direttamente in energia elettrica attiva, imponendo che la potenza
reattiva risulti essere praticamente nulla e inoltre si può adeguare l'erogazione di potenza alle variazioni di
23
velocità di rotazione dettate dalla variazione di velocità del vento. chiedere
Diagramma circolare
Rappresenta tutte le possibili condizioni di funzionamento della macchina elettrica asincrona.
Le ipotesi su cui si basa il diagramma circolare sono quelle di una macchina collegata a una rete di
potenza prevalente. Quindi.
Vs = cost
ωs = cost
Facciamo riferimento al circuito semplificato della macchina elettrica asincrona:
Analizzando il circuito della macchina si possono scrivere le seguenti equazioni.
Ir’ + Iµ = Is con
I r' =
Vf
R'
Rs + r
s
Dividendo per jxcc otteniamo
+ jxcc
R'
⇒ Rs + r I r' + jx cc I r' = V f
s
R'
Rs + r I r'
Vf
s
+ I r' =
jxcc
jxcc
con questa equazione possiamo tracciare il
diagramma delle correnti.
Da questo diagramma vettoriale si ricava che il vettore
Vf
jxcc
è costante e pari alla somma dei vettori I r' e
R
Rs + I r'
Vf
s
. Il triangolo OAB è un triangolo rettangolo la cui ipotenusa
è costante. Al variare dello
jxcc
jxcc
scorrimento il vertice A si muove lungo una circonferenza.
Sappiamo che I’r + Iµ = Is dove la corrente di magnetizzazione Iµ è una quantità costante essendo la
24
'
r
tensione costante, quindi anche il vertice delle vettore Is (punto A) al variare dello scorrimento da meno
infinito a più infinito descriverà una circonferenza.
Questo è il diagramma circolare della macchina elettrica asincrona.
(costruzione del diagramma)
Partendo da Vf si determina il valore della corrente magnetizzante si
V
traccia poi il vettore f Quindi può esser tracciato il diagramma
jxcc
Vf
e vista la
circolare, in seguito si determina I r' =
Rr'
Rs + + jxcc
s
’
relazione I r + Iµ = Is si ricava Is.
Abbiamo quindi tracciato il diagramma che ci consente di
rappresentare l'evoluzione di Is al variare dello scorrimento.
Questo diagramma è importante perché ci consente di fare delle
considerazioni energetiche. Infatti se la tensione Vf è costante la
proiezione di Is su Vf risulta essere proporzionale alla potenza attiva
applicata, la proiezione di Is in quadratura con la direzione di Vf
risulta essere proporzionale alla potenza reattiva assordita dalla
macchina.
Gli assi che risultano essere in fase e in quadratura con la tensione
Vf permetteranno, attraverso dei fattori di scala, di determinare la
potenza elettrica attiva e reattiva che viene assorbita dalla macchina.
Partiamo dalla condizione in cui s = 0 quindi la macchina sta viaggiando ad una velocità di rotazione
uguale a quella di sincronismo, il ramo rotorico è come se fosse aperto, allora si ha che Ir=0 ; Is = Im il
punto A è caratterizzato da uno scorrimento nullo.
Ci poniamo ora nella condizione di s=1 (rotore bloccato)
Ponendo s=1 troviamo facilmente il valore della corrente Ir il modulo e in fase φcc = arctg xcc/(R’r + Rs)
tracciando il vettore della corrente rotorica determino il punto C (condizione di s=1)
Ugualmente per s = ∞ si trova φcc = arctg xcc/Rs
25
Analizziamo le condizioni di funzionamento della macchina.
Per s=0 circola solo la corrente statorica uguale alla corrente di magnetizzazione, in questo caso avremo
solo potenza persa nel ferro di statore, questa viene individuate nel diagramma dalla proiezione di Im
sull'asse delle potenze.
Per s=1 il rotore risulta essere bloccato la potenza meccanica prodotta risulterà essere uguale a zero
Pm = Tm ω m = 0 , al contrario la potenza elettrica è diversa da zero, parte di questa viene convertita in
perdite nel ferro (proiezione di Im sull'asse delle potenze), l’altra aliquota di potenza rappresenta le perdite
negli avvolgimenti di statore e di rotore che per il momento in questo diagramma non riusciamo a scindere
l'una dall'altra.
Ci poniamo ora nella condizione di s = ∞ , in questo caso il vertice del vettore Ir giace sul punto
corrispondente a s = ∞ . Se lo scorrimento va ad infinito la potenza trasferita sarà nulla
Pt = ms
Rr' '2
I r = 0 quindi lo sarà anche la potenza meccanica, perché non c'è circolazione di corrente
s
rotorica attiva.
In questo caso non si ha un flusso di potenza che va dallo statore al rotore e la potenza elettrica che viene
fornita serve a sopperire le perdite nel ferro e nel rame statorico.
Si può pensare di sfruttare questa condizione per dividere le perdite di statore da quelle di rotore. Se s=1
la corrente Ir può essere divisa in due componenti, una disposta lungo la linea d’azione che collega A con
s = ∞ (si hanno soltanto perdite nel rame di statore) e una in fase con la tensione che è relativa alle
perdite nel rame di rotore.
26
Se considero un generico punto k, caratterizzato da una determinata potenza attiva e reattiva e traccio il
segmento parallelo alla retta delle potenze attive, si determina subito l'aliquota relativa alle perdite nel
ferro, l'aliquota relativa alle perdite di statore e di rotore e infine, ciò che rimane, troviamo la potenza
meccanica della macchina.
Il diagramma circolare ci consente di vedere immediatamente la ripartizione energetica all'interno della
macchina, in particolare ci consente di individuare facilmente la zona di funzionamento da motore che è
quella compresa tra s=0 e s=1e la zona di funzionamento da generatore.
La potenza reattiva assorbita dalla macchina risulta sempre positiva sia che questa lavori da motore sia che
lavori da generatore. La macchina presenta il circuito di eccitazione sull'avvolgimento statorico quindi
l’energia necessaria per produrre il campo magnetico di eccitazione a traferro è fornita, sia nel
funzionamento da motore che da generatore, dallo statore e quindi la potenza reattiva non può che essere
sempre positiva sia nella condizione di funzionamento da generatore che da motore.
27
MACCHINE A CORRENTE CONTINUA
La macchina elettrica in corrente continua per essere vista come una macchina sincrona rovesciata, alla
macchina a corrente continua avvolgimento di eccitazione che sullo statore e l'avvolgimento di indotto e
sul rotore. L'avvolgimento di eccitazione viene alimentato in corrente continua, abbiamo quindi una
pulsazione nulla, dalle generalità sulle macchine elettriche rotanti impongono che se ωs=0 allora la
pulsazione di rotore deve essere uguale alla velocità di rotazione meccanica oppure ωr=ωmp.
L'avvolgimento di statore costituisce eccitazione, produce quindi il campo di eccitazione. Il circuito porti
citazione può essere realizzato attraverso gli avvolgimenti statorici è alimentato in corrente continua
oppure attraverso un magnate permanente, un elettromagnete una struttura che viene preventivamente
magnetizzata e che crea un campo magnetico che presenta un polo nord e un polo sud. Se le espansione
polari vengono opportunamente sagomate si può ottenere considerando come posizione di riferimento la
posizione rispetto allo statore che risulta essere questa(quale? )?????????????????
la distribuzione di induzione sullo statore fatta in questo modo:
?????????? Se ho un conduttore immerso all'interno dell'avvolgimento rotorico e l'avvolgimento ruota con
velocità ωm
e = lvB = lω m
R ˆ
B cos(ω m t + ξ )
2
????????
commutatore a lamelle
28
Formule trigonometriche
C. Enrico – F. Bonaldi
1
________________________________________________________________________________
Formule trigonometriche
In trigonometria esistono delle formule fondamentali che permettono di calcolare le funzioni
goniometriche della somma di due angoli o della loro differenza, della metà, del doppio ecc.
Si chiamano formule di: addizione, sottrazione, duplicazione, bisezione, parametriche, prostaferesi,
Werner.
FORMULE DI ADDIZIONE E SOTTRAZIONE
Dimostriamo ora come si arriva alle formule di sottrazione del coseno e del seno, che sono quelle da
cui si ricavano le altre in maniera immediata:
Disegniamo la circonferenza goniometrica di equazione x2 + y2 = 1
Per ipotesi gli angoli RÔS e QÔP sono congruenti e di ampiezza α−β, i segmenti RQ e PS sono
congruenti perché corde uguali che sottendono archi uguali; si avrà quindi:
RQ2 = PS2
e le coordinate dei loro estremi saranno allora:
R(1 ; 0)
P(cos α ; sin α)
Q(cos β ; sin β)
S[ cos (α−β) ; sin (α−β) ]
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
2
________________________________________________________________________________
per la formula della distanza fra due punti è
RQ2 = ( cos α − cos β )2 + ( sin α − sin β )2
analogamente:
PS2 = [ cos(α−β) − 1 ]2 + [ sin(α−β) ]2
quindi possiamo uguagliare le due relazioni ed ottenere in tal modo
[ cos(α−β)−1 ]2 + [ sin(α−β) ]2 = (cos α − cos β)2 + (sin α − sin β)2
svolgendo i quadrati si otterrà:
cos2(α−β) + 1 − 2 cos(α−β) + sin2(α−β) − 2 sin(α−β) =
= cos2α + cos2β − 2 cos α cos β + sin2α + sin2β − 2 sin α sin β
per il primo principio della trigonometria, risulta sin2 α + cos2 α = 1 e sin2β + cos2β = 1,
quindi diventa
2 − 2 cos(α−β) = 2 − 2 cos α cos β − 2 sin α sin β
semplificando per due e cambiando i segni si ottiene alla fine la formula di sottrazione del coseno:
cos(α − β) = cos α cos β + sin α sin β
Ecco la formula di sottrazione del seno:
ricordando che è sin (α−β) = cos[ 90° − (α−β) ], possiamo scrivere
sin(α−β) = cos[ 90° − (α−β) ] = cos[ (90° + β) − α) ]
Utilizzando la formula di sottrazione del coseno e ricordando le relazioni che intercorrono tra archi
associati, può scriversi
sin(α−β) = cos[ 90° − (α−β) ] = cos[ (90° + β) − α ] = cos(90° + β)cos α + sin(90° + β)sin α =
− sin β cos α + cos β sin α
quindi la formula cercata è
sin(α − β) = sin α cos β − cos α sin β
Le altre due formule si ricavano facilmente tenendo conto che è
sin(α+β) = sin[ α−(−β) ] e cos(α + β) = cos[ (α−(−β) ]
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
3
________________________________________________________________________________
Quindi le formule di addizione sono le seguenti:
sin(α+β) = sin α cos β + cos α sin β
cos(α+β) = cos α cos β − sin α sin β
Per la tangente, che sappiamo essere il rapporto tra seno e coseno (2° principio della goniometria),
le formule sono:
tan (α + β ) =
tan α + tan β
1 − tan α tan β
tan (α − β ) =
tan α − tan β
1 + tan α tan β
valide solo se è (α+β) ≠ 90° + k 180°, (α−β) ≠ 90° + k 180°, α ≠ 90° + k 180° ed infine
β ≠ 90° + k 180°, in quanto tali valori renderebbero l'espressione priva di significato.
Per la cotangente le formule sono:
cot (α + β ) =
1 − cot α cot β
cot α + cot β
cot (α − β ) =
1 + cot α cot β
cot α − cot β
Vediamo ora qualche applicazione di queste formule: vogliamo ricavare il seno di 75°.
sin 75° = sin(30°+45°) = sin 30° cos 45° + cos 30° sin 45° =
=
1 2
3 2
=
⋅
+
⋅
2 2
2 2
(
2+ 6
2
=
1+ 3
4
4
)
Ora troviamo la tangente di 105°.
tan 105° = tan(60°+45°) =
3 +1
1− 3
razionalizzando diventa
−
2 3+4
2
quindi la tangente di 105° risulta − 3 − 2 .
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
4
________________________________________________________________________________
FORMULE DI DUPLICAZIONE
Queste formule permettono di calcolare le funzioni del doppio di un angolo; si ricavano con le
formule di addizione.
Calcoliamo il seno di un angolo pari a 2α
sin 2α = sin(α+α) = sin α cos α + cos α sin α = 2 sin α cos α
Per il coseno si procede analogamente:
cos 2α = cos(α+α) = cos α cos α − sin α sin α = cos2 α − sin2 α
Veniamo a tangente e cotangente ed applichiamo sempre le rispettive formule di addizione:
tan 2α =
2 tan α
1 − tan 2 α
cot 2α =
1 − cot 2 α
2 cot α
La prima è valida se α ≠ 90° + k 180°, la seconda ha significato per α ≠ k 180°
Ed ora qualche esempio; le applicazioni di queste formule per determinare le funzioni di angoli
sono ben poche, al contrario risultano molto utili e di grande ausilio nella risoluzione delle
equazioni e disequazioni trigonometriche.
1) Dimostriamo che il coseno dell'angolo di 90° è nullo:
cos 90° = cos(45°+45°) = cos2 45° − sin2 45° =
1
1
−
=0
2
2
2) Dimostriamo che 120° ha lo stesso seno di 60° perché angoli supplementari:
sin 120° = 2 sin 60° cos 60° = 2 ⋅
3 1
3
⋅ =
2 2
2
2) Calcoliamo tan 60°:
3
2 tan 30°
3 =
tan 60° = tan (30°+30°) =
=
1
1 − tan 2 30°
13
2⋅
3.
3) Si vogliano calcolare le radici dell'equazione:
cos 2x + 2 sin (90°-x) –
1
=0
2
si ottiene
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
5
________________________________________________________________________________
cos2x - sin2x + 2 cos x –
1
=0
2
trasformando tutto in coseno
cos2 x - (1-cos2x) + 2 cos x –
1
3
= 0, quindi 2 cos2x + 2 cos x –
=0
2
2
4 cos2x + 4 cos x - 3 = 0
da cui cos x =
prima soluzione: cos x =
seconda soluzione: cos x =
− 2 ± 4 + 12
;
4
1
e quindi x = ± 60° + k 360°
2
3
impossibile perché deve essere -1 ≤ cos x ≤ 1
2
Di conseguenza l'unica soluzione vale ± 60° + k 360°.
FORMULE PARAMETRICHE
Esprimono seno e coseno di un angolo in funzione razionale della tangente dell'angolo metà.
Dalle formule di duplicazione, è noto che
sin 2α = 2 sin α cos α
cos 2α = cos2 α − sin2 α
Dal primo principio della goniometria vale l'espressione sin2 α + cos2 α = 1; operiamo la
sostituzione in entrambe le formule
sin 2α =
2 sin α cos α
sin 2α + cos 2 α
cos 2α =
cos 2 α − sin 2 α
sin 2α + cos 2 α
Calcolando con la proprietà distributiva ed essendo la tangente il rapporto seno/coseno, supponendo
sempre che sia α ≠ 90° + k 180°, ricaviamo:
sin 2α =
2 tan α
1 + tan 2 α
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
6
________________________________________________________________________________
cos 2α =
1 − tan 2 α
1 + tan 2 α
Sostituendo ora 2α con α e di conseguenza α con
2 tan
sinα =
Oppure, se si pone tan
α
2
le formule diventano
2
1 - tan 2
1 + tan
2
α
1 + tan 2
cosα =
α
2
α
2
α
2
α
2
uguale al parametro t (da cui il nome "formule parametriche"),
sinα =
2t
1+ t2
cosα =
1- t2
1+ t2
valide specificamente sempre se il denominatore è diverso da zero, cioè se è α ≠ 180° + k 360°
FORMULE DI BISEZIONE
Servono, noti i valori di sin α, cos α e tan α a calcolare i valori delle funzioni trigonometriche
dell’angolo metà, cioè:
sin
α
2
, cos
α
2
e tan
α
2
Si ricavano dalle formule di duplicazione del coseno, cioè da:
cos 2α = 1 − 2 sin2 α = 2 cos2 α – 1 .
Ponendo in queste formule
cos α = 1−2 sin2
α
2
;
α
2
al posto di α si ottiene :
cos α = 2 cos2
α
2
– 1 da cui :
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
7
________________________________________________________________________________
sin2
α
2
=
1 − cos α
;
2
cos2
α
=
2
1 + cos α
2
da cui infine si ricavano le formule di bisezione :
sin
α
2
= ±
1 − cos α
;
2
cos
α
2
= ±
1 + cos α
2
dividendo poi membro a membro le due eguaglianze e supponendo quindi che sia cos α diverso
da –1 e quindi α diverso da 180° + k 360°, si ottiene:
tan
α
2
= ±
1 − cos α
1 + cos α
Bisogna fare attenzione nella scelta del segno davanti alla radice:
ne va sempre preso uno solo e, per decidere quale, bisogna conoscere il quadrante in cui cade il
secondo lato dell’angolo α, eliminando così ogni incertezza.
Con queste formule si possono ad esempio trovare i valori delle funzioni trigonometriche di angoli
45°
come 22°30’ essendo 22°30’ =
oppure di 15°.
2
Ad es. per sin 15° si ottiene :
3 −1
2− 2
Si propone un semplice esercizio :
α
α
α
α
7
e che 270°<α<360° calcolare sin
, cos , tan : dunque
sarà
4
2
2
2
2
compreso tra 135° e 180° e quindi si devono prendere i segni...
sapendo che cos α =
Altro es. : sapendo che è: sin 3α =
1
3
3
3
e che : 90°< 3α < 180° calcolare sin α , cos α , tan α .
3
2
2
2
Per svolgere questi esercizi è utile ripassare le formule relative ai radicali doppi.
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
8
________________________________________________________________________________
FORMULE DI PROSTAFERESI
(parola che deriva dal greco e significa: somma e sottrazione)
Come dice il nome, permettono di trasformare in prodotto , la somma o differenza dei seni di
2 angoli e la somma o differenza dei coseni di 2 angoli.
Consideriamo le formule :
sin(α+β) = sin α cos β + cos α sin β
sin(α−β) = sin α cos β – cos α sin β
e sommando prima membro a membro e poi sottraendo sempre membro a membro le 2 formule
sopra indicate si ottiene :
sin(α+β) + sin (α−β) = 2 sin α cos β
[1]
sin(α+β) – sin (α−β) = 2 cos α sin β
Analogamente, partendo da:
cos(α+β) = cos α cos β – sin α sin β
cos(α−β) = cos α cos β + sin α sin β
si ottiene:
cos (α+β) + cos(α−β) = 2 cos α cos β
[2]
cos (α+β) – cos (α−β) = − 2 sin α sin β
Per dare una forma più semplice alle [1] e [2] poniamo :
α+β = p
α−β = q
e ricaviamo α, β in funzione di p e di q ottenendo :
α=
p+q
p−q
;β=
2
2
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
9
________________________________________________________________________________
Sostituendo queste nelle [1] e [2] si ottengono finalmente le formule di prostaferesi :
sin p + sin q = 2 sin
p+q
p−q
cos
2
2
sin p – sin q = 2 cos
p+q
p−q
sin
2
2
cos p + cos q = 2 cos
p+q
p−q
cos
2
2
cos p – cos q = − 2 sin
p+q
p−q
sin
2
2
Esempio : risolvere l’equazione :
sin 4x – sin 2x – sin x = 0
Applichiamo le formule di prostaferesi al primo e secondo addendo :
2 cos (3x) sin x – sin x = 0 da cui :
sin x (2 cos 3x –1) = 0 da cui deriva :
sin x = 0 e quindi x = k 180°
cos 3x =
1
da cui 3x = ± 60° + k 360°
2
le soluzioni sono pertanto : x = k 180°, x = ± 20° + k 120°
Altro esempio : risolvere l’equazione :
sin x + sin 2x + sin 3x = 0
Applichiamo le formule di prostaferesi al primo e terzo addendo ottenendo :
2 sin 2x cos x + sin 2x = 0 da cui :
sin 2x = 0 da cui: 2x= k 180° e quindi x = k 90°
2 cos x +1 = 0 cui segue : cos x = −
1
e quindi x = ± 120° + k 360°
2
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
10
________________________________________________________________________________
Esercizio da svolgere :
cos 2x + cos 5x – cos
7
x = 0 (la soluzione è : x = 25.71° + k 51,42°; x = ± 40° + k 240°)
2
FORMULE DI WERNER
Si può osservare che dalle [1] e [2] si ricavano queste formule :
sin α sin β =
1
[ cos(α−β) - cos(α+β) ]
2
cos α cos β =
1
[ cos(α+β) + cos(α−β) ]
2
sin α cos β =
1
[ sin(α+β) + sin(α−β) ]
2
cos α sin β =
1
[ sin(α+β) − sin(α−β) ]
2
che trasformano un prodotto di funzioni trigonometriche in una somma algebrica.
Esempio: risolvere la seguente equazione :
cos 3x cos 4x = cos 5x cos 2x , applicando le formule di Werner si ha:
1
1
(cos 7x + cos x) = (cos 7x + cos 3x) da cui semplificando :
2
2
cos x - cos 3x = 0 e quindi applicando le formule di prostaferesi si ottiene:
-2 sin 2x sin (-x) = 0 da cui sin 2x sin x = 0 e quindi compattando le soluzioni si ottiene x = k 90°
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
11
________________________________________________________________________________
SENO E COSENO IN FUNZIONE DELLA TANGENTE
Esiste un modo per esprimere seno e coseno di un angolo in tangente. A tale scopo si usano delle
formule molto utili per la risoluzione di equazioni e disequazioni goniometriche; vediamo come
arrivarci.
Partiamo dalla relazione fondamentale:
www.matematicamente.it
Formule trigonometriche
C. Enrico – F. Bonaldi
12
________________________________________________________________________________
sin 2 α + cos 2 α = 1
dividiamo tutto per cos 2 α supponendo che sia α ≠ 90°+k 180° e otteniamo:
1
tan 2 α + 1 =
cos 2 α
Ora facciamo il reciproco di entrambi i membri:
1
tan α + 1
2
= cos 2 α [1]
A questo punto possiamo scrivere il coseno in funzione della tangente:
cos α = ±
1
tan 2 α + 1
ricordando che la scelta del segno dipende sempre dal quadrante in cui cade il secondo lato dell'angolo.
Per esprimere ora il seno in funzione della tangente, si può procedere trasformando cos 2 α in seno,
ottenendo dalla [1]:
1
tan α + 1
2
= 1 − sin 2 α
donde, facendo i dovuti calcoli, si ottiene:
sin 2 α =
tan 2 α
tan 2 α + 1
ed estraendo la radice quadrata:
sin α = ±
tan α
tan 2 α + 1
www.matematicamente.it