Lezione XVI
Impulso, forze impulsive e urti
1
Impulso di una forza
Sempre nell’ambito della dinamica del punto materiale, dimostriamo il semplice
teorema dell’impulso, che discende immediatamente dalla seconda legge del moto
di Newton
d~
p
F~ =
dt
prendendone l’integrale definito din dt tra un istante t1 e un istante t2
Z
t2
F~ dt = p~(t2 ) − p~(t1 )
t1
L’integrale temporale della forza agente su un punto materiale, uguale alla
variazione di quantità di moto del punto materiale stesso, si chiama impulso
della forza nell’intervallo considerato.1
Naturalmente non è necessario limitarsi al punto materiale. Per un sistema
esteso, l’analogo integrale della prima equazione cardinale dà
Z
t2
ext
F~tot
dt = p~tot (t2 ) − p~tot (t1 )
t1
L’impulso della forza totale esterna agente su un sistema è uguale alla
variazione della quantità di moto totale.
2
Forze impulsive e urti
In molte situazioni la forza che agisce su un punto materiale o su un corpo
esteso non è conoscibile o misurabile in dettaglio perchè agisce per un intervallo
di tempo molto breve, durante il quale assume valori di intensità molto grande.
In questi casi non si osserva la forza F~ (t) ma se ne misura l’impulso, cioè l’effetto
in termini di variazione netta di quantità di moto. Si parla in questo caso di
forze impulsive.
1 Spesso
i fisici usano la parola “impulso” per designare la quantità di moto stessa – in particolare in ambiti più avanzati come la meccanica razionale o analitica, la meccanica relativistica
o quella quantistica.
1
Consideriamo per esempio il caso (unidimensionale) di un corpo di massa m
che scivola senza attrito su un piano orizzontale con velocità iniziale v0 diretta
per esempio lungo l’asse x. In corrispondenza di un certo x̄ si trova un respingente costituito da una molla di lunghezza di riposo `0 e costante elastica k, una
delle cui estremità è fissata a una parete.
Dal momento in cui la massa tocca l’estremità libera della molla inizierà
comprimerla. La molla raggiungerà una compressione massima, dopodiché si
decomprimerà fino a tornare alla lunghezza di riposo.
Se prendiamo come origine delle x la posizione dell’estremità libera della
molla quando questa è a riposo, abbiamo x̄ = `0 e l’equazione del moto diventa
(supponendo che la massa rimanga attaccata alla molla)
mẍ = −k[`0 − (`0 − x)] = −kx
(1)
la cui soluzione è date le condizioni iniziali x(0) = 0 e ẋ(0) = v0 (all’istante
t = 0 la massa tocca l’estremità libera della molla, che si trova in x = 0, con
velocità v0 )
v0
sin ωt = v0
x(t) =
ω
r
m
sin
k
r
v(t) = v0 cos ωt = v0 cos
r
k
t
m
k
t
m
!
!
Mantenendo per ora l’ipotesi che la massa rimanga attaccata alla molla
durante tutto il moto per t > 0, abbiamo che la forza esercitata dalla molla
in funzione del tempo vale
√
Fx (t) = mẍ = −mv0 ω sin ωt = −v0 mk sin
r
k
t
m
!
(2)
La forza è negativa
p – dunque repulsiva – per il primo semiperiodo dell’oscillazione t < T2 = π m
k (e in seguito, se questa prosegue, per tutti i semiperiodi
dispari).
p
pm
Nel secondo semiperiodo π m
k < t < 2π
k , se l’oscillazione prosegue
la forza diventa positiva: la molla sta “tirando” la massa, non si limita a
respingerla.
Consideriamo due casi:
1. Se il problema specifica che si tratta di un respingente, questo significa
che la molla è un dispositivo che può solo spingere, non tirare: si oppone
alla compressione, non all’allungamento.
Questo significa che non può mai imprimere un’accelerazione positiva alla
massa m: l’equazione del moto cessa di essere la 1, la forza torna a essere
nulla e la massa prosegue con velocità costante uguale a quella che ha al
momento del distacco
v(t > T /2) = v(T /2) = −v0
2
La massa m ha “rimbalzato” sulla molla e se ne distacca dopo un intervallo
di tempo
r
m
T
∆t =
=π
2
k
avendo invertito la propria velocità. L’impulso fornito dalla molla vale
Z ∆t
∆p =
F (t)dt = mv(∆t) − mv(0) = −2mv0
0
k
m
ed è indipendente da
(e quindi da ∆t)
2. Se invece il problema specifica che la molla è fatta in maniera tale da
“agganciare” la massa e non permettere più che questa si stacchi, si ha
che per tutti i t > 0 l’equazione del moto rimane la 1, e l’oscillazione 2
continua a essere la legge oraria della massa m.
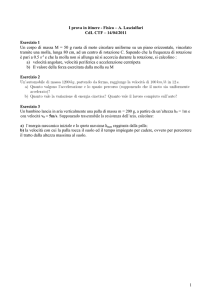
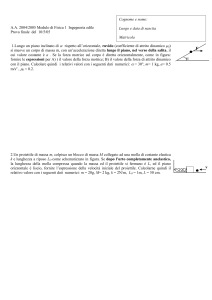
x
t
Figura 1: Grafico della posizione in funzione del tempo per la massa m che urta
un respingente a molla, nel caso in cui la molla possa solo respingere (in verde)
e nel caso in cui la massa non si possa staccare dalla molla (in blu).
Consideriamo ora che cosa accade quando prendiamo il limite di molla
infinitamente rigida2 k → ∞.
Nel primo caso accade che il tempo ∆t di interazione tra massa e molla diventa infinitesimo, a tutti gli effetti pratici nullo, mentre il valore massimo della
forza tende a infinito, essendo proporzionale a ω e quindi inversamente proporzionale a T . La molla ha agito per un tempo non misurabile, ma ha fornito
un impulso finito e misurabile, pari in valore assoluto al doppio della quantità
di moto iniziale della massa m. L’energia meccanica del sistema si è conservata: puramente cinetica prima dell’urto, somma di energia cinetica e potenziale
durante il brevissimo tempo dell’urto, di nuovo totalmente cinetica alla fine dell’interazione. Nel secondo caso l’oscillazione della molla continua per t > 0, ma
2 A rigore in fisica non ha senso definire molto grande o molto piccolo (tendente a infinito o
a zero) il valore di una quantità dimensionale, nel nostro caso la costante elastica della molla:
bisogna sempre riferirsi a una quantità adimensionale, ossia al rapporto tra due quantità con
le stesse dimensioni fisiche. Nel nostro caso fare il limite per grandi valori di k significa fare
il limite per piccoli valori di ∆T , cioè in realtà del rapporto tra il periodo di oscillazione della
molla e gli intervalli di tempo “tipici” del problema, o meglio tra ∆T e i più piccoli intervalli
di tempo che riusciamo a misurare o percepire.
3
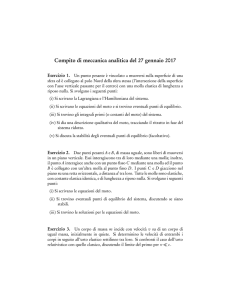
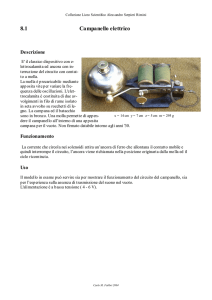
x
t
Figura 2: Stessa situazione della figura precedente, per un valore più grande del
rapporto k/m. Nel limite in cui questo tende a infinito, la traiettoria verde è un
rimbalzo istantaneo (a t = 0) con cambiamento di segno della velocità, mentre
la traiettoria blu corrisponde, dal punto di vista macroscopico, all’arresto della
massa m nell’istante in cui viene a contatto con il muro.
con un periodo che diventa impercettibilmente piccolo e soprattutto un’ampiezza xmax = vω0 che tende a zero. A tutti gli effetti macroscopici osservabili la
massa si è fermata, ha una velocità finale nulla.3 Anche in questo caso dal punto
di vista rigoroso l’energia si è conservata: puramente cinetica prima dell’interazione (t < 0), somma di energia cinetica e potenziale per t > 0. Dal punto
di vista macroscopico, tuttavia, l’energia appare non conservarsi: per t < 0
l’energia del sistema (la massa m, o se si vuole il sistema massa+molla+muro)
era l’energia cinetica della massa. Dopo l’urto con la molla, dal punto di vista
macroscopico quel che vediamo è la massa ferma attaccata al muro: per noi
l’energia cinetica iniziale si è persa (non vediamo la microscopica compressione
della molla né il microscopico moto della massa): l’energia si è conservata ma
trasformata in energia “invisibile” dal punto di vista meccanico macroscopico
(che è quello che ci interessa descrivere). Diciamo quindi che in questo caso
l’energia meccanica (che era solo cinetica) non si è conservata.
Questo è il limite di forza impulsiva:
• la forza della molla, che schematizza la forza di contatto tra massa e
muro, ha agito per un tempo brevissimo non misurabile, ma ha fornito un
impulso finito e misurabile. Invece, il valore medio della forza
Z ∆t
1
∆~
p
¯
F~ (t) dt =
F~ ≡
∆t 0
∆t
(è un vettore il cui modulo) tende a infinito.
• durante il tempo di interazione ∆t il valore della velocità del punto materiale (o del centro di massa del sistema nel caso generale) subisce una
3 In realtà quella che si riesce a misurare è la velocità media su intervalli di tempo grandi
rispetto al periodo di oscillazione (troppo piccolo per i nostri strumenti di misura): v̄ =
x(t2 )−x(t1 )
: il numeratore vale al massimo 2xmax , che tende a zero, mentre t2 − t1 rimane
t2 −t1
piccolo ma finito, facendo tendere a zero la velocità media misurata.
4
variazione finita: nel limite ∆t → 0 la funzione ~v (t) – o meglio, almeno
una delle componenti vx (t), vy (t), vz (t) – ha una discontinuità di prima
specie (“salto”), mentre le coordinate del punto (o del centro di massa del
sistema) non variano apprezzabilmente.4
3
Urti elastici e anelastici
I due casi considerati sono esempi, rispettivamente, di urto elastico e urto
anelastico.
Gli urti sono interazioni tra corpi dovuti a forze di contatto (o di reazione)
che agiscono per tempi molto brevi rispetto a quelli misurabili macroscopicamente, e sono dunque forze impulsive, che durante il tempo di azione modificano
apprezzabilmente le velocità dei corpi ma non la loro posizione.
Poiché l’energia potenziale è una funzione della posizione, e le posizioni dei
corpi non variano apprezzabilmente durante un urto, l’unica energia che può variare nel corso di un urto è quella cinetica . L’urto si chiama elastico se l’energia
cinetica totale (somma delle energie dei vari costituenti) dei corpi coinvolti nell’urto si conserva – ha cioè lo stesso valore prima e dopo l’urto. In caso contrario
l’urto si dice anelastico.
3.1
Urti in presenza di forze non impulsive
Se la forza totale agente su un punto materiale è data da forze impulsive e
non impulsive, queste ultime non hanno effetto durante il breve tempo in cui le
impulsive agiscono.
Infatti, se
F~tot = F~I + F~NI
durante il breve tempo di azione delle impulsive si ha che l’impulso totale
Z ∆t
Z ∆t
Z ∆t
~
~
F~NI (t) dt
FI (t) dt +
F (t) dt =
0
0
0
Il primo termine della somma dà un risultato finito al tendere di ∆t a zero,
per definizione di forza impulsiva. Il secondo è l’integrale temporale di una forza
che, non essendo impulsiva, non può assumere intensità infinitamente grandi, e
quindi tende a zero. Per la componente x, per esempio, si ha infatti
Z ∆t
Z ∆t
max
max
FNIx (t) dt ≤
FNI
dt = FNI
∆t → 0
x
x
0
0
Dunque durante il tempo infinitesimo di un urto hanno effetto solo
le forze impulsive: ai fini della determinazione degli effetti dell’urto
(differenza tra un istante immediatamente successivo e un istante
immediatamente precedente all’urto) sul moto dei corpi coinvolti le
forze non impulsive possono essere trascurate.
Una forza non è impulsiva se la sua intensità è limitata superiormente: la
forza di una molla ideale con k fissato, per esempio, non è impulsiva, né lo
4 Se
la funzione v(t) ha una discontinuità “a salto” non assume mai valori infiniti nell’inR
tervallo infinitesimo ∆t attorno al punto di discontinuità, e quindi ∆x = 0∆t v(t), dt tende a
zero al tendere a zero di ∆t.
5
è la forza di gravità. Possono essere impulsive in genere le forze di reazione
vincolare, lisce o di attrito, e le tensioni delle corde.
6