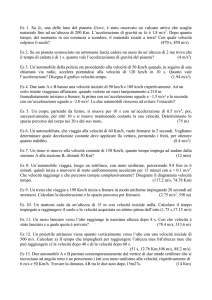
Moto circolare uniforme
Il vettore velocità puo cambiare modulo, ma anche direzione. Tutti due sono
legati ad un accelerazione.
Un cambio continuo di direzione di velocità (ma non di modulo) risulta in un
moto circolare uniforme.
y
V1
V0
r1
r0
x
L’accelerazione derivata dal cambio di direzione
del vettore velocità e sempre perpendicolare al
vettore velocità (quindi perpendicolare alla
tangente alla traiettoria) : e un’accelerazione
centripeta.
Accelerazione centripeta
v
V1
r2
v2
V0
r2
v1
r
r1
r1
v
r
v
v
t
r
Moto circolare uniforme : periodo di revoluzione T
Velocità angolare
d
2
v
dt
T
r
r
v
lim
v t
t
0
r
2
v
dv
t
dt
ac
v
2
r
2 R
V
Moto periodico
Periodo T (in s)
Frequanza (in s -1 = Hertz (Hz) )
Velocita angolare (in rad/s)
Moto circolare non uniforme
Accelerazione centripeta (radiale) e tangenziale
aT
a
dv
aR
dt
2
aT
2
aR
v
2
r
Accelerazione istantanea
Moto circolare e curvilineo - II
Coordinate polare : (ur, u ), seguono il
moto della particella : non sono costanti
con il tempo !
Coordinate cartesiane :
R
Coordinate polare:
x
r cos(
y
r sin(
r
(x
2
arctan
ur
cos(
u
cos
)i
sin(
)j
i
sin
R
)
j
2
)
2
y )
u
sin(
dur
d
y
dt
dt
x
du
d
dt
Derivate dei versori in
coordinate polare :
)i
2
cos(
sin(
)i
)j
cos(
d
)j
dt
cos(
)i
sin(
)j
dt
dur
dt
u
d
ur
dt
u
;
du
dt
ur
x (t )i
rur
y (t ) j
velocita angolare media
Si definisce la velocita angolare :
t
lim
Posizione
R
V
Velocita:
V
d
0
t
velocita angolare istantanea
dt
rur
dR
dr
dt
dt
vr u r
ur
r u
r
dur
dt
Componenti radiale e tangenziale della velocita.
a
dt
Moto circolare uniforme : r, ω costante
a
ac: accelerazione centripeta, diretta
verso il centro della traietoria
risponsabile per il cambio di direzione
della velocita.
d (V u
dV
dV
dt
u
V
du
dt
a
dV
dt
a
aT u
)
dt
u
V
2
r
acur
ur
Dinamica del moto circolare uniforme
Dal secondo principio della dinamica, abbiamo F=ma, e per un moto circolare uniforme a=v2/R e
centripeta. Per avere un moto circolare uniforme, ci vuole quindi una forza centripeta che
permetta di avere tale accelerazione: la reazione vincolare, l’attrito, la grazitazione terrestre…
Esempio : il pendolo conico
V
tan
Angolo
indipendente della
massa del corpo
2
Rg
periodo del moto
2
L cos
g
Sistemi non inerziali
I principi della dinamica newtoniana sono sempre validi se si tiene conto delle forze d’inerzia
o apparenti che traducono il fatto che il sistema di riferimento e’ accelerato rispetto ad un
sistema galileano.
Per una particella che si muove con la veolictà lineare V in un sistema di riferimento B
in rotazione alla velocità angolare ω (vettore diretto lungo l’asse di rotazione) rispetto
ad un sistema di riferimento d’inerzia, l’accelerazione nel sistema di riferimento A si
scrive :
aA
aB
2
V
(
r)
Il secondo termine dell’e uazione è l’accelerazione di Coriolis (a Co), e il terzo è
l’accelerazione centrifuga (atr). La particella rissente uest’accelerazioni come delle forze
che vengono chiamate fittizie o d’inerzia perche non hanno un origine fisica come la
grazitazione o la reazione vincolare ma sono dovute all’accelerazione del sistema di
riferimento.
Il secondo principio della dinamica si puo scrivere in un sistema di riferimento non
inerziale :
F
m a Co
m a tr
ma
o
F
F fittizie
ma