A lato è raffigurata la semiretta di origine Q=(3,1) diretta come
il vettore (4,5).
Se interpreto il piano cartesiano come una cartina, la distanza 1
come 1 metro, le direzioni dell'asse x e dell'asse y come l'est e il
nord, posso pensare tale semiretta come la traiettoria rettilinea di
una barca a motore che ad ogni secondo avanza di 4 metri in
direzione est e di 5 metri in direzione nord.
(A) Se inizio a misurare il tempo quando la barca è in Q, la posizione P=(x,y) della barca dopo 1
sec è:
x = 3+4 = 7, y = 1+5 = 6.
Ha infatti eseguito una traslazione di vettore (4,5).
Posso descrivere più brevemente il calcolo ora eseguito così:
P = (3,1) + (4,5) = (7,6)
Dopo 2 sec la barca ha compiuto 2 traslazioni di vettore (4,5):
P = (3,1) + 2(4,5) = (3,1) + (8,10) = (11,11)
Qual è la posizione raggiunta dalla barca dopo 3 sec?
Qual è la posizione raggiunta dalla barca dopo t sec?
P=…
P=…
(B) Disegna sul sistema di riferimento a fianco la traiettoria della barca se la
sua posizione P dopo t sec fosse descritta dalla formula P = (4,10) + t (1,–2).
[traccia: individua la posizione iniziale e disegna
t
x
y
– e poi prolunga – il vettore che descrive dove si è
0
…
…
spostata la barca in 1 sec; altrimenti aiutati con la
1
…
…
tabellina a fianco]
2
…
…
3
…
…
Associa alle seguenti descrizioni le figure corrispondenti (se possibile, altrimenti rispondi con "/").
(1) i punti raggiungibili da (3,6) spostandosi nella
direzione del vettore (3,1)
(2) i punti raggiungibili da (3,6) spostandosi con
pendenza 1/3 e avanzando verso est
(3) i punti raggiungibili da (4,4) spostandosi nella
direzione del vettore (3,1)
(4) i punti raggiungibili da (4,4) spostandosi con
pendenza 1/3
(5) i punti raggiungibili da (5,1) spostandosi nella
direzione del vettore (–2,3) o del vettore (2,–3)
(6) i punti raggiungibili da (1,7) spostandosi nella
direzione del vettore (–2,3) o del vettore (2,–3)
Le figure a e c del quesito precedente (dove con "…" si intende che sono da considerare anche i
punti che seguono nella direzione indicata), corrispondono alla nostra idea intuitiva di retta: non c'è
una specifica direzione di percorrenza, ma basta muoversi mantenendo la stessa inclinazione.
Consideriamo figura 20:
Possiamo descrivere la figura r come i punti raggiungibili da P mantenendo l'inclinazione di
18.4°: que-sto è il valore approssimato della direzione del vettore (3,1).
In generale, una retta è una figura ottenibile come unione di una semiretta e della semiretta ad
essa opposta (semiretta che ha la stessa origine e direzione opposta). Tra le due direzioni, quella
che cade in [0°, 180°) viene chiamata inclinazione della retta.
In altre parole, possiamo dire che una retta di inclinazione α è una figura che si ottiene mediante
una rotazione di ampiezza α dell'asse x.
Completa le seguenti descrizioni delle rette (già
considerate a p.12) riprodotte a lato:
(a) retta per (3,0) con inclinazione … °
(b) retta per (0, … ) con inclinazione … °
(c) retta per (0, … ) con inclinazione … °
[tieni conto che, operando in gradi, 2 dà
63.43…]
Il grafico di ogni funzione del tipo x ax+b, cioè l'insieme di
punti {(x,y) : y = a x + b}, è una retta:
• è la retta che passa per il punto (0,b), infatti 0 a0+b=b,
• e ha pendenza a: variando x di 1 y varia di a.
Viceversa, ogni retta con inclinazione diversa da 90° è
descrivibile come il grafico di una funzione del tipo x ax+b:
• come a si prende la pendenza corrispondente
all'inclinazione della retta, ovvero la variazione
∆y corrispondente alla variazione ∆x=1 (nel
caso della figura a lato, avanzando di 1 nella
direzione dell'asse x si avanza di 1.5 nella
direzione dell'asse y),
• come b si prende l'ordinata del punto che la
retta ha in comune con l'asse y, spesso chiamata
anche intercetta (le due rette raffigurate
intersecano l'asse y in (0,2) e in (0,–1).
Per questo motivo le funzioni del tipo x
ax+b vengono dette funzioni lineari (in
inglese, "retta" si dice "line", pronuncia: lain).
Sul sistema di riferimento a lato sono parzialmente
tracciate le rette r = {(x,y) : y=–x+3} e s =
{(x,y) : y=2x–1}.
Indica qual è r e qual è s.
Quindi traccia (con un tratto più spesso) gli
insiemi A = {(x,y) : y=2x–1 AND x ≥ 1.5} e
B = {(x,y) : y = –x+3 AND 1 ≤ x ≤ 4}.
A è una semiretta contenuta nella retta {(x,y) :
y=2x–1}. Di B, sulla base di quanto studiato alla
scuola media, diremmo che è un segmento
contenuto nella retta {(x,y) : y=–x+3}.
Evidenzia, sul sistema di riferimento a fianco,
la figura costituita dalla semiretta di origine
(–4,3) e direzione 340° e dalle altre
semirette ottenibili da essa con rotazioni di
ampiezza minore o uguale a 60°.
I concetti di segmento e di angolo possono essere definiti in modo simile:
• Dati un punto A, una direzione α e un numero L, con L≥0, l'insieme dei punti raggiungibili da A
con traslazioni di direzione α e modulo minore o uguale a L viene chiamato segmento;
– il numero L viene chiamato lunghezza del segmento;
– il punto A e il punto B ottenuto con la traslazione di modulo L sono chiamati estremi del
segmento;
– tale segmento viene indicato con "segmento AB" o,
se non ci sono ambiguità, solo con "AB".
fasi della "generazione" del segmento AB
• Dati una semiretta a e un numero φ, con 0≤ φ ≤2π=360°, l'unione delle semirette ottenibili da a
con rotazioni antiorarie attorno all'origine di a di ampiezza minore o uguale a φ viene chiamata
angolo;
– il numero φ viene chiamato ampiezza dell'angolo;
– la semiretta a e la semiretta b ottenuta con la rotazione di ampiezza φ vengono chiamate lati
dell'angolo;
– tale angolo è indicato con "angolo ab" o con "∠ ab" o con "".
L'analogia tra segmenti e angoli è, però,
solo parziale: mentre parlando di segmento
AB o di segmento BA si indica la stessa
figura, l'angolo ab e l'angolo ba sono figure
di-verse: → figura a lato.
L'angolo ∠ ab, se a è la semiretta AB e b è la semiretta
AC, viene indicato anche ∠ BAC o BC
Quanto sono ampi BC e CB nella illustrazione a lato:
ampiezza di BC =
ampiezza di CB =
Nota. A volte si usano le notazioni BC e CB (o le notazioni
∠ab e ∠ba) per indicare indifferentemente l'angolo
generato dalla rotazione (antioraria) della semiretta AB
verso la semiretta AC o l'angolo generato dalla rotazione
della semiretta AC verso la semiretta AB. Ciò può essere
ritenuto lecito se il contesto (il ragionamento che si sta
svolgendo, l'evidenziazione sul disegno di quale dei due
angoli si sta considerando, …) consente di evitare ambiguità.
Traccia la retta di equazione y = 4–x/2 sul sistema di riferimento soprastante (tieni conto che
l'intercetta sull'asse y è 4 e che la pendenza è –1/2: ad ogni variazione ∆x corrisponde una
variazione ∆y di segno op-posto e di valore assoluto dimezzato). Evidenzia, quindi, con un
tratteggio la figura: {(x,y) : y ≤ 4–x/2}.
Come dovresti sapere, gli angoli che, come l'angolo BC evidenziato nell'illustrazione
soprastante, sono ampi 90° vengono detti angoli retti, quelli di ampiezza minore di 90° vengono
detti acuti, quelli ampi più di 90° vengono detti ottusi (nel linguaggio comune l'aggettivo "ottuso"
viene usato per indicare un oggetto poco appuntito, smussato, o, in senso figurato, per indicare una
persona che è poco "acuta", cioè non è in grado di penetrare, andare a fondo, approfondire le
questioni).
La figura che hai tratteggiato nel quesito 27 è un "semipiano":
è una delle due parti in cui il piano viene suddiviso dalla retta di
equazione y = 4–x/2, e queste due parti sono "uguali". Infatti, ad
esempio, posso sovrapporre la parte tratteggiata all'altra parte di
piano mediante una rotazione di 180° attorno al punto A.
La figura può essere pensata anche come angolo DB, frutto della rotazione della semiretta
AD di 180°. E` un angolo
"piatto": i lati AD e AB
hanno la stessa inclinazione.
Più in generale, tutti gli
angoli ampi 180° vengono
detti angoli piatti o
semipiani.
Gli angoli ampi più di 180° vengono detti concavi; si
presentano infatti come figure che hanno un avvallamento,
una "conca" (nel linguaggio comune sono chiamati concavi
gli oggetti che presentano degli incavi). Gli angoli con
ampiezza ≤ 180° vengono detti con-vessi (anche nel
linguaggio comune sono chiamate convesse le superfici
"tondeggianti" o che, comunque, non presentano incavi).
Che tipo di figura sono gli angoli di ampiezza 0? E quelli di ampiezza 360°?
Utilizzando i concetti definiti finora, come definireste i concetti di parallelismo e di perpendicolarità
tra rette?
....................................................................................
....................................................................................
....................................................................................
....................................................................................
Gli assi x e y, intersecandosi perpendicolarmente, dividono il piano in quattro
angoli retti, usualmente chiamati quadranti: viene detto 1° quadrante quello che ha
per lati le semirette "positive" dell'asse x e dell'asse y; vengono chiamati 2°, 3° e 4°
quadrante quelli ottenuti dal primo attraverso successive rotazioni di 90°.
Nota. Quando abbiamo parlato di semiretta di origine Q e direzione α (insieme dei punti raggiungibili da Q
con traslazioni di direzione α), abbiamo sempre inteso che il punto Q appartenesse alla semiretta: se da Q mi
sposto con ∆x=0 e ∆y= 0 arrivo (cioè, rimango) in Q, ossia se a Q applico il vettore di modulo 0 ottengo il
punto Q stesso. Si noti, per inciso, che al vettore di modulo 0 può essere attribuita una qualunque direzione.
Analogamente, parlando del segmento AB, abbiamo inteso che gli estremi A e B appartenessero al segmento e, parlando di ∠ab, abbiamo considerato i lati a e b contenuti nell'angolo.
Così come a volte è utile distinguere l'intervallo di numeri [3.2, 7.5] da (3.2, 7.5) o da [3.2, 7.5), a volte
può essere utile considerare una semiretta privata dell'origine o un segmento privato di uno o di entrambi gli
estremi, o solo la parte interna di un angolo, privandolo dei lati, …
Per indicare il segmento AB privato degli estremi si ricorre a
rappresentazioni come quella a fianco; si parla anche di segmento
aperto AB, a suggerire il fatto che i punti A e B, che "chiudono" nelle
due direzioni il segmento, non appartengono ad esso. Nel caso del
segmento HK privato di H si parla di segmento aperto dalla parte di H e
chiuso dalla parte di K.
Analogamente, se vogliamo escludere i lati di un angolo o, in particolare, la retta che delimita un
semipiano, parliamo di angolo o di semipiano aperto.
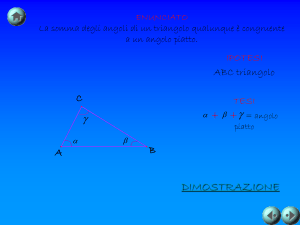
Intersecando il semipiano delimitato dalla retta BC e contenente A , , e quello delimitato dalla
retta BA e contenente C , , ottengo un angolo convesso, l'angolo CA (→ figura 21, (2)).
Se interseco anche il semipiano delimitato dalla retta AC e contenente B , , ottengo una figura
(→ figura 21, (3)) che, come sai già dalla scuola media, viene chiamata triangolo ABC.
I punti A, B e C sono chiamati vertici del triangolo, i segmenti AB, BC e CA sono chiamati lati
del triangolo, gli angoli convessi BC, CA e AB sono chiamati angoli (o angoli interni) del
triangolo.
Figura 21
(1)
(2)
(3)
Viene chiamata quadrangolo o quadrilatero ABCD la figura che ottengo unendo a un triangolo
ABC un altro triangolo CDA che abbia in comune con ABC solo i punti del segmento AC e sia tale
che D non stia né sulla retta BA né sulla retta BC (altrimenti – vedi caso (3) della figura 22 –
riotterrei un triangolo).
I lati delle due figure unite, escluso il lato AC che hanno in comune, vengono detti lati del
quadrilatero.
Analogamente, unendo a un quadrilatero ABCD un triangolo DEA che
abbia in comune con ABCD solo i punti del lato AD e sia tale che E non stia
né sulla retta BA né sulla retta CD, ottengo una figura chiamata pentagono
ABCDE. I lati delle due figure unite, escluso il lato AD che avevano in
comune, vengono detti lati del pentagono.
In modo simile si definiscono esagoni, ettagoni, ottagoni, … e, più in generale, gli n–agoni o
poligoni di n lati.
L'unione dei lati di un poligono viene chiamata contorno del poligono. La somma delle
lunghezze dei lati viene chiamata perimetro del poligono o lunghezza del contorno del poligono.
Il perimetro non è altro che la lunghezza del percorso a tratti rettilinei costituito dai vertici del
poligono.
Più precisamente, nel caso, ad esempio, del triangolo ABC, se
considero il percorso a tratti rettilinei costituito dalla successione di
punti A, B, C, A che a partire da A ritorna in A, ho che la lunghezza di
tale percorso (→ p.5) è d(A,B)+d(B,C)+d(C,A), cioè la somma dei
lati del triangolo.
I punti di un poligono non appartenenti al contorno sono detti punti
interni del poligono.
Nota. A volte viene chiamato poligono ciò che qui abbiamo chiamato contorno del poligono.
7. Simmetrie, isometrie e similitudini
A questo punto, definite le rotazioni, possiamo completare il discorso lasciato in sospeso alla fine
di §2.
Abbiamo visto che le traslazioni conservano la distanza (se traslo un segmento la sua lunghezza
non cambia) e non modificano l'orientamento delle figure (se traslo una semiretta la sua direzione
non cambia).
Le rotazioni possono modificare l'orientamento di una figura, ma, anch'esse, conservano la
distanza.
Ciò è facilmente verificabile per alcune rotazioni,
ad es. quelle attorno a (0,0) ampie 90° e 180°. Ma la
cosa può essere dimostrata in generale.
La rotazione di 180° cambia i segni di entrambe le
coordinate (il pesce, ruotando dal 1° al 3° quadrante,
inverte la rotta e si capovolge): la punta del-la pinna
evidenziata passa da (12, 6) in (–12, –6).
Quindi la differenza tra le ascisse (∆x) e quella tra le
ordinate (∆y) dei due punti evidenziati sul pesce cambiano
segno ma mantengono gli stessi valori assoluti (|∆x| = q, |
∆y| = p). La distanza tra i due punti () resta perciò
invariata.
La rotazione di 90° scambia ascisse con ordinate (il
pesce passa da una rotta orizzontale a una verti-cale) e poi
cambia il segno delle ascisse: (12, 6) (–6, 12). Quindi
dopo la rotazione |∆x| e |∆y| si scambiano. La distanza tra i
due punti evidenziati (poiché =) resta perciò invariata.
Se definisco movimento piano ogni trasformazione ottenibile componendo traslazioni e
rotazioni, sono dunque certo che i movimenti piani conservano la distanza e, quindi, sono una
buona rappresentazione matematica di come può essere spostato un oggetto rigido appoggiato su
una superficie piana.
Abbiamo visto che vi sono trasformazioni che, pur conservando le distanze, non sono movimenti
piani: per essere realizzate "fisicamente" necessitano di un ribaltamento, di un movimento che esce
dal piano.
Di questo genere è, ad esempio, la trasformazione F: (x,y) (–x,y),
interpretabile come un ribaltamento attorno all'asse y, usualmente
chiamata simmetria rispetto all'asse y.
F trasforma il segmento a nel segmento b, i cui estremi hanno
ordinate uguali e ascisse opposte a quelle degli estremi di a.
Riapplicando F, b viene ritrasformato in a. Si dice che le figure a e b
sono l'una la simmetrica dell'altra rispetto all'asse y.
∆y degli estremi di b è uguale a ∆y degli estremi di a, mentre ∆x cambia
solo nel segno. La distanza tra gli estremi resta perciò invariata.
Se applico lo stesso movimento piano sia all'asse y che ad a e b
otten-go una retta e due nuovi segmenti, che vengono detti simmetrici
rispetto a questa nuova retta. A lato sono raffigurati due esempi:
• (A): il movimento è la traslazione ∆x=1, ∆y=0; il nuovo asse di
simmetria è la retta x=1;
• (B): il movimento è una rotazione di 30°.
Sotto è raffigurata una figura A e la figura B ad essa simmetrica
rispetto alla retta r. Data A, come può essere tracciata B?
Basta considerare r come nuovo asse y e, come se si fosse tracciato
un nuovo asse x, usando una squadra, associare a ogni punto P di A il
punto P’ che rispetto al nuovo sistema di riferimento abbia:
•
uguale ordinata (cioè stia sulla perpendicolare a r pasante per
P) e
•
ascissa opposta (cioè stia nel semipiano delimitato da r opposto
a quello di P e – vedi figura – sia tale che d(H,P) = d(H,P’).
Nota. Si usa dire, anche, che una figura è simmetrica se è dotata di un asse
di simmetria, cioè se esiste una retta che divide la figura in due parti
simmetriche rispetto ad essa. Le figure seguenti sono simmetriche: una ha
un solo asse di simmetria, una ne ha 4, l'altra ne ha infiniti.
I quattro sistemi di
riferimento a fianco sono
monometrici; il lato di un
quadretto della griglia vale 5.
(A) Nel sistema a sinistra,
la trasformazione F che
trasforma il pesce in alto in
quello in
basso è una traslazione, una rotazione o una
simmetria? Sai descrivere F(x,y)?
(B) Nel sistema al centro, la trasformazione
che trasforma il pesce in alto in quello in
basso è una simmetria. Trovate come
individuare e tracciare (con squadra e riga
millimetrata) l'asse di simmetria.
(C) Nel sistema a destra, lo stesso pesce del caso (A) è stato trasformato in due diverse figure: un
pesce più piccolo ottenuto moltiplicando le coordinate dei punti del pesce originale per un numero
h minore di 1 (i punti del pesce rimpicciolito distano dall'origine meno dei corrispondenti punti del
pesce originale), e un pesce più grande ottenuto moltiplicando le coordinate dei punti del pesce
originale per un numero k maggiore di 1. Quanto valgono h e k?
(D) Nel sistema in basso, lo stesso pesce è sottoposto a un altro tipo di trasformazione. Provate a
descriverla a parole e mediante una opportuna funzione a 2 input e 2 output (F(x,y) = …).
Le trasformazioni piane ottenibili componendo movimenti e ribaltamenti, cioè componendo
traslazioni, rotazioni e simmetrie, conservano la distanza. Si può dimostrare che non vi sono altre
trasformazioni piane che conservano la distanza. Queste trasformazioni vengono anche chiamate
isometrie piane (in greco ìsos vuol dire "uguale" e métron vuol dire "misura").
Nota. Vi sono molte applicazioni per il disegno al calcolatore che consentono di trasformare figure
mediante isometrie: sono dotate di comandi che permettono di selezionare una figura rappresentata sullo
schermo e di traslarla, ribaltarla o ruotarla. Le rotazioni vengono, però, in genere, effettuate attorno a un
punto scelto automaticamente dalla applicazione e i ribaltamenti possono essere effettuati solo rispetto ad
assi verticali od orizzontali, scelti automaticamente dalla applicazione. Come è possibile realizzare una
qualunque isometria?
La cosa è semplice: per realizzare una qualunque isometria non è necessario disporre di tutti i tipi di
rotazione e di simmetria: basta disporre delle rotazioni attorno a un particolare punto e delle simmetrie
rispetto a una particolare retta; le altre rotazioni e le altre simmetrie possono essere ottenute componendo
traslazioni e questi tipi particolari di rotazioni e di simmetrie.
Ad esempio, per realizzare la rotazione di 45° gradi attorno al punto (30,10),
illustrata a lato, disponendo solo delle rotazioni attorno all'origine, posso:
(1) effettuare una traslazione di vettore v che porti il punto (30,10) nell'origine,
(2) ruotare di 45° attorno all'origine il pesce così spostato,
(3) effettuare la traslazione opposta, di vettore –v, che riporti il punto nella posizione
iniziale.
Analogamente, disponendo solo delle simmetrie rispetto ad assi verticali posso realizzare simmetrie
rispetto a qualunque asse. Ad es. per trasformare il triangolo A di fig. 23 nel triangolo B, simmetrico rispetto
alla retta r, posso prima effettuare una rotazione di ampiezza α che porti r in posizione verticale, poi
effettuare un ribaltamento rispetto a un asse verticale e, infine, effettuare una rotazione di ampiezza –α che
riporti r nell'inclinazione originale.
Le isometrie, oltre a conservare la distanza, conservano:
• l'allineamento tra punti: se B e C sono punti raggiungibili da A
muovendosi nella stessa direzione α,
– effettuata una traslazione, tra i traslati A', B' e C' vale la stessa
relazione (B' e C' sono raggiungibili da A' muovendosi sempre
nella direzione α);
– effettuata una rotazione di ampiezza β, tra i nuovi punti A", B"
e C" vale ancora la stessa relazione (B" e C" sono raggiungibili da
A" muovendosi sempre in una stessa direzione, la direzione α+β
[o α+β –360° : → p.9] );
• l'ampiezza degli angoli: se ∠ ab è ampio α, cioè ruotando a di α si
ottiene b,
– effettuata una traslazione, le semirette traslate a' e b' hanno le
stesse direzioni di a e b, per cui ∠ a'b' è ampio quanto ∠ ab;
– effettuata anche una rotazione di ampiezza β, le nuove semirette
a" e b", essendo il frutto della stessa rotazione, saranno ancora tali
che per ottenere b" da a" occorre ruotare di α.
Anche le trasformazioni illustrate nel punto (C) del quesito 30:
•
(x,y) → (x/2,y/2) che ha rimpicciolito il pesce in scala 1/2,
•
(x,y) → 2 (x,y) = (2x,2y) che ha ingrandito il pesce in scala 2,
conservano l'allineamento e l'ampiezza degli angoli. Sono casi particolari di similitudini, cioè di
funzioni che trasformano le figure in figure ad esse simili.
Più in generale, si chiama similitudine ogni trasformazione che moltiplica la distanza tra una
qualunque coppia di punti per un fissato numero positivo k (se k>1 è un ingrandimento, se k<1 è
un rimpicciolimento, se k=1 è una isometria).
Le similitudini del tipo (x,y) → k (x,y) non modificano l'orientamento delle figure (il pesce del
punto (C) del quesito 30 rimane orizzontale, le pinne mantengono la stessa inclinazione, …).
Componendo queste similitudini con rotazioni e traslazioni si possono ottenere le altre similitudini.
Consideriamo ad esempio il pesce B (→ figura a lato), che è
simile al pesce A: ne è una riproduzione in scala 1/2.
Può essere ottenuto prima trasformando A in X mediante la
funzione (x,y) , poi ruotando X di 90° attorno al punto
evidenziato.
Le trasformazioni del tipo (x,y) → k (x,y) vengono chiamate
anche trasformazioni di scala monometriche in quanto possono
essere pensate come il frutto di uno stesso cambiamento delle
due scale del sistema di riferimento: se sull'asse x e sull'asse y tracciassi le tacche più vicine tra loro, a distanza dimezzata, otterrei una
rappresentazione del pesce A più piccola, uguale a quella che, col sistema attuale, si è ottenuta per il
pesce X.
La trasformazione del punto (D) del quesito 30, (x,y) → (2x,y),
dilata orizzontalmente il pesce. Una deformazione analoga sarebbe stata
ottenuta cambiando la scala sull'asse x, tracciando le tacche su di esso a
distanza doppia.
Anche questa trasformazione viene chiamata trasformazione di scala.