Capitolo 6
ELEMENTI DI
FLUIDODINAMICA
Il comportamento della materia in astrofisica può essere solo in pochi casi ridotto a processi a particella singola. La materia stellare, le corone e i venti
stellari, il mezzo interstellare, le galassie, i nuclei galattici attivi (getti e dischi
di accrescimento), il mezzo intergalattico, la distribuzione a grande scala delle
galassie, la radiazione fossile del big-bang primordiale sono descritte tramite
teorie fluidodinamiche, in quanto le interazioni tra i vari elementi (ioni, atomi,
molecole, ma anche stelle e galassie quando ci si riferisca alla dinamica di aggregazioni astrofisiche dominate dalla gravitazione) garantiscono in generale un
comportamento collettivo.
A seconda dei casi occorre utilizzare la teoria dei fluidi classici o relativistici.
In alcune applicazioni i fluidi sono composti di elementi elettricamente neutri
per cui contano solo le collisioni a corto raggio; in altri casi gli elementi sono
elettricamente carichi e occorre utilizzare la teoria dei plasmi, basata su interazioni elettromagnetiche collettive a lungo raggio. Nel caso dell’interazione fra
galassie nella struttura a grande scala si deve infine tener conto dell’interazione
gravitazionale a lungo raggio.
In questo Capitolo considereremo anzitutto il caso dei fluidi neutri, dando
una descrizione introduttiva della cosiddetta fluidodinamica.
Due principali classi di trattazioni fluidodinamiche sono disponibili:
1. tramite le equazioni cinetiche (microscopiche), che permettono lo studio
dettagliato del plasma, includendo fenomeni fuori dall’equilibrio termodinamico
2. tramite le equazioni fluide (macroscopiche), che consentono di trattare
la maggior parte dei fenomeni, ma esclude lo studio dell’evoluzione della
funzione spettrale delle particelle.
173
174
6.1
CAPITOLO 6. ELEMENTI DI FLUIDODINAMICA
Densità di particelle nello spazio delle fasi
f (q, p,t) e momenti sulle velocità
La trattazione cinetica descrive l’evoluzione temporale di un sistema a grande
numero di elementi attraverso la funzione distribuzione f (q, p,t) nelle variabili
canoniche q e p e nel tempo t, tramite la quale si definisce la densità di particelle
nello spazio delle fasi:
numero di particelle in d3 q d3 p =
= f (q, p,t) d3 q d3 p .
(6.1)
Tale descrizione non segue dunque le singole componenti (particelle) del sistema, ma rappresenta la dinamica localmente utilizzando il concetto di funzione
di campo nello spazio delle fasi. In tal senso le variabili canoniche sono variabili indipendenti, una rappresenta la posizione e l’altra il momento coniugato
corrispondente, cioè la quantità di moto.
La f (q, p,t) non è direttamente misurabile. Le misure sperimentali macroscopiche permettono invece di misurare i suoi momenti sulle velocità v, cioè i
suoi integrali sulle velocità, che corrispondono a quantità ben note.
Nel caso non-relativistico e normalizzando alla densità numerica nello spazio
delle r:
Z
f d3 v = n(r,t) ,
(6.2)
i momenti misurabili sono:
R
ρ(r,t) = mfRd3 v
V(r,t) = n−1 vf d3 v
u(r,t) = vR− V
pijR(r,t) = mvi vj f d3 v
= mui uj d3 u + ρVi Vj
= Πij + ρVi Vj
press. termica
+ cinetica
R
densità di energia termica −→ ε(r,t) = R 12 mu2 f d3 v
flusso termico
−→ q(r,t) = 12 mu2 uf d3 v
densità di massa spaziale
velocità di flusso
velocità termica
tensore di pressione
6.2
−→
−→
−→
−→
(6.3)
Equazione di Liouville
L’equazione fondamentale per la descrizione cinetica di insiemi di particelle con
comportamento coerente (fluido) è l’equazione di continuità della densità di particelle nello spazio delle fasi f (r, v, t), che deriva dall’imporre la conservazione
del numero totale di particelle in un qualunque volume dello spazio delle fasi
quando non siano presenti interazioni che modifichino la quantità di moto in
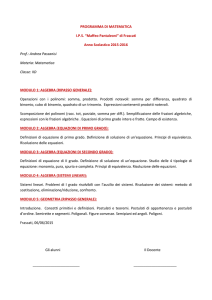
maniera discontinua. Ciò è rappresentato in Fig. 6.1 per una rappresentazione
in una sola coordinata spaziale e una sola della velocità. Un’evoluzione continua
richiede che le particelle nel volume A si portino in un volume B senza perdite
o aggiunte.
6.2. EQUAZIONE DI LIOUVILLE
175
Fig. 6.1: Teorema di Liouville
Per particelle di massa m, le variabili canoniche nello spazio delle fasi (in
condizioni non-relativistiche) sono:
qi = xi , pi = mvi
e la condizione di continuità può essere scritta:
∙ ¸
µ
¶
Z
Z
F
f 0 r0 + v0 dt, v0 +
dt, t + dt dr0 dv0 = f (r, v, t) drdv
m
(6.4)
(6.5)
dove la funzione f è una funzione di campo euleriana. Sviluppando in serie al
prim’ordine l’integrando a sinistra, ricordando che r e v sono variabili indipendenti e assumendo che le F siano indipendenti dalle velocità, l’eguaglianza può
essere scritta in forma locale:
∂f
F
+ v · ∇r f +
· ∇v f = 0
∂t
m
(6.6)
Ricordando che v = dr/dt e F/m = a = dv/dt, e definendo la velocità di flusso
nello spazio delle fasi:
µ
¶ µ
¶
dri dvi
Fi
U=
,
= vi ,
,
i = 1, 2, 3
(6.7)
dt dt
m
si ricava la seguente forma sintetica con l’operatore differenziale a sei dimensioni
∇r,v ≡ (∂/∂ri , ∂/∂rj ):
∂f
(6.8)
+ U·∇r,v f = 0
∂t
176
CAPITOLO 6. ELEMENTI DI FLUIDODINAMICA
oppure:
∂f
+ ∇r,v · (f U) = 0
∂t
dove si è utilizzato il fatto che
∇r,v · U = ∇r · v+∇v ·
(6.9)
F
= 0.
m
Il primo termine a destra è nullo perché, come già ricordato più sopra, r e
v sono variabili indipendenti, mentre il secondo è nullo per le tipiche forze
naturali, posizionali (gravitazionali, elettrostatiche, ecc.) e forze di Lorentz
(∇v · (v × B) = 0). Un’altra forma utile, che prende il nome di equazione di
Liouville è pertanto:
Df
=0
(6.10)
Dt
dove si utilizza l’operatore D/Dt ≡ (∂/∂t + U · ∇r,v ).
Quando intervengano effetti di collisioni a corto raggio che comportano
evoluzioni discontinue nello spazio delle fasi, l’equazione di continuità si modifica
formalmente:
µ ¶
F
∂f
∂f
dr
,
(6.11)
+
· ∇r f +
· ∇v f =
∂t
dt
m
∂t coll
e il termine a destra dipende dalla microfisica delle collisioni.
6.3
Equazioni di Vlasov e di Boltzmann
In assenza di collisioni l’equazione di Liouville prende il nome di equazione di
Vlasov :
∂f
Fi ∂f
∂f
+
=0.
+ vi
∂t
∂xi
m ∂vi
(6.12)
In presenza di collisioni l’equazione di Vlasov diventa l’equazione di Boltzmann:
µ ¶
Fi ∂f
∂f
∂f
∂f
+
=
.
(6.13)
+ vi
∂t
∂xi
m ∂vi
∂t coll
La descrizione cinetica richiede la soluzione di queste equazioni che in genere
risultano complesse, in quanto le forze vengono a loro volta definite tramite
la posizione e la velocità di tutte le particelle. Solo in alcuni casi è possibile
ottenere soluzioni generali.
6.4
Equazioni macroscopiche
Le equazioni macroscopiche derivano dall’equazione di Boltzmann tramite il
calcolo dei momenti sulle velocità, cioè passando a grandezze mediate. In tal
modo si ottengono relazioni tra quantità macroscopiche misurabili.
6.4. EQUAZIONI MACROSCOPICHE
Si definisce il momento della forza:
densità di forza → F =
177
Z
Ff d3 v .
(6.14)
Qualora la forza non dipenda da v, F = nF.
Si considerano i primi tre momenti dell’equazione di Boltzmann utilizzando
le funzioni macroscopiche:
1
(6.15)
mv2 .
2
Si moltiplica l’equazione di Boltzmann per una delle tre funzioni e si integra
sull’intero spazio delle velocità, utilizzando il principio che nelle integrazioni le
variabili q, p,t siano indipendenti, che le ψ i (v) siano funzioni di v soltanto e che
la f (q, p,t) sia isotropa e si annulli per v → ∞:
Z
Z
∂f 3
∂
ψ(v) d v =
(6.16)
ψf d3 v
∂t
∂t
Z
Z
∂f 3
∂
d v =
(6.17)
ψf vi d3 v
ψ(v)vi
∂xi
∂xi
Z
Z
Z
∂ψ 3
Fi
Fi
Fi ∂f 3
∂f 3
d v =
d v=−
fd v .
(6.18)
ψ(v)
ψ
m ∂vi
m
∂vi
m
∂vi
ψ 0 (v) = mv0 , ψ 1 (v) = mv1 , ψ 2 (v) =
Quest’ultima relazione vale per forze indipendenti da v, o per la forza di Lorentz
∝ v × B, ed è ottenuta tramite integrazione per parti in cui il fattore integrato
si annulla all’infinito.
Per quanto riguarda il termine di collisione, nel caso di urti binari elastici
con piccola energia potenziale di interazione, i momenti sono trascurabili:
µ ¶
µ ¶
Z
Z
∂f
∂f
m
d3 v '
mv
d3 v
∂t coll
∂t coll
µ ¶
Z
1
∂f
'
d3 v ' 0 .
(6.19)
mv 2
2
∂t coll
Il momento di ordine zero (ψ 0 ) corrisponde all’equazione di continuità (nello
spazio delle coordinate spaziali):
∂ρ
+ ∇ · (ρV) = 0
(6.20)
∂t
Il momento del prim’ordine (ψ 1 ) corrisponde all’equazione di conservazione della
quantità di moto:
DV
ρ
+ ∇ · Π̃ = nF
(6.21)
Dt
dove Π̃ è il tensore di pressione; per plasmi omogenei e isotropi ∇ · Π̃ → ∇p.
Infine il momento del second’ordine (ψ 2 ) corrisponde all’equazione di conservazione dell’energia; dopo alcune trasformazioni algebriche, e utilizzando le due
equazioni precedenti, si ottiene:
Dε
+ ε∇ · V + ∇ · q + Π̃ : ∇V = nF· hui ,
Dt
(6.22)
178
CAPITOLO 6. ELEMENTI DI FLUIDODINAMICA
dove ε = (1/2) Tr Π̃ e il simbolo ”:” indica un prodotto scalare fra tensori.
Il sistema (6.20), (6.21), (6.22) non è chiuso in forma consistente, in quanto
il numero dei momenti di f incogniti, ρ, V, Π̃, ε, t è superiore al numero di
equazioni. La sua chiusura richiede opportune assunzioni fisiche; le possibilità
più comuni in idrodinamica sono:
1. definizione di un’equazione di stato p = p(ρ);
2. condizione di adiabaticità q = 0, corrispondente a: D(pρ−γ )/Dt = 0, dove
γ è l’indice adiabatico (5/3 nel caso di gas perfetti monoatomici).
6.5
Equazioni di Eulero
Quando si considera un gas perfetto in equilibrio maxwelliano:
2
f = n (2πmkT )−3/2 e−mu
/2kT
(6.23)
consegue che:
∇ · Π̃ = ∇p,
hui = t = 0
(6.24)
e le equazioni fluide (in assenza di collisioni) si semplificano nel sistema delle
equazioni di Eulero:
∂ρ
+ ∇ · (ρV) = 0
∂t
DV
+ ∇p = nF
Dt
3 DT
nk
+ p∇ · V = 0
2
Dt
p = p (ρ, T ) .
6.6
(6.25)
(6.26)
(6.27)
(6.28)
Fluidi a più componenti e con diffusione, viscosità e conduzione termica
Tenendo conto di sistemi a più componenti e della loro interazione di scorrimento
relativo, si ottengono le equazioni di Navier-Stokes:
∙
µ
¸¶
Fi
∂ni
+ ∇ · ni V−Di ∇ ln (ni kT ) −
=0
∂t
kT
µ
¶
1
DV
ρ
+ ∇p = η∇2 V+ ζ + η ∇ (∇ · V)
Dt
3
X
Dε
(ni Fi · hui i)
+ ε∇ · V + ∇ · q + Π̃ : ∇V =
Dt
i
(6.29)
(6.30)
(6.31)
dove Di è il coefficiente di diffusione e η e ζ sono coefficienti di viscosità e si
debbono ricavare appropriate forme per q e Π̃.
6.7. SUI CRITERI DI APPLICABILITÀ DELLA TRATTAZIONE FLUIDA179
6.7
Sui criteri di applicabilità della trattazione
fluida
A conclusione di questa rapida discussione delle equazioni fluide, ritorniamo
sulle condizioni fisiche in cui esse sono applicabili.
Siano λ e τ le scale di lunghezza e tempo su cui variano le grandezze fisiche
che definiscono il fluido. Si può parlare di comportamento fluido di un elemento
di volume r3 (r ¿ λ) se le particelle che vi si trovano al tempo t evolvono
in maniera coerente fino al tempo t + τ (cioè mantengono i rispettivi valori
delle grandezze fisiche molto vicini, come mostrato in Fig. 6.1): il volume r3 è
pertanto l’elemento fluido. Una condizione necessaria, implicita in queste considerazioni, è che il trasporto di energia termica fuori dall’elemento sia piccolo,
il che comporta t ≈ 0.
La coerenza è essenzialmente mantenuta dalle collisioni che impediscono alle
particelle di diffondere liberamente e differenziarsi; in tal senso deve essere r À
λc (cammino libero medio rispetto alle collisioni. E quindi a maggior ragione:
λ À λc ,
(6.32)
λ
(6.33)
À τc ,
V
p
dove in equilibrio termico V ≈ vth ≈ γp/ρ; per scale maggiori di λ o per
tempi più lunghi di τ interviene il comportamento collettivo.
τ=
180
CAPITOLO 6. ELEMENTI DI FLUIDODINAMICA