Sistemi dinamici: un’applicazione allo studio
delle malattie autoimmuni
Candidata: Rosa Claudia Torcasio
Matr. 112188
Relatori: Dott. Giovanni Mascali,
Dott. Giuseppe Alı̀,
Dott. Pasquale Palumbo
Anno Accademico 2008/2009
Indice
Introduzione
3
1 Sistemi dinamici
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Sistemi dinamici lineari . . . . . . . . . . . . . . . . . . . .
1.3.1 Esponenziale di operatori . . . . . . . . . . . . . . .
1.3.2 Teorema fondamentale per i sistemi lineari . . . . .
1.3.3 Forma di Jordan . . . . . . . . . . . . . . . . . . .
1.3.4 Teoria della stabilità . . . . . . . . . . . . . . . . .
1.3.5 Sistemi lineari in due dimensioni . . . . . . . . . .
1.4 Sistemi dinamici non lineari . . . . . . . . . . . . . . . . .
1.4.1 Teorema fondamentale di esistenza ed unicità . . .
1.4.2 Dipendenza dalle condizioni iniziali e dai parametri
1.4.3 Flusso di un sistema dinamico non lineare . . . . .
1.4.4 Linearizzazione . . . . . . . . . . . . . . . . . . . .
1.4.5 Sistemi dinamici non lineari in due dimensioni . . .
1.5 Cicli limite . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Il teorema di Poincarè-Bendixon . . . . . . . . . . .
1.5.2 Il teorema di Lienard . . . . . . . . . . . . . . . . .
2 Biforcazioni e caos
2.1 Biforcazioni in una dimensione
2.2 Biforcazioni in più dimensioni
2.3 Biforcazione di Hopf . . . . .
2.4 Caos . . . . . . . . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
7
9
9
11
13
16
18
24
33
39
40
45
49
49
52
55
.
.
.
.
60
60
68
70
74
2.4.1
2.4.2
2.4.3
Equazioni di Lorenz . . . . . . . . . . . . . . . . . . . 74
Semplici proprietà delle equazioni di Lorenz . . . . . . 74
Alcune definizioni . . . . . . . . . . . . . . . . . . . . . 81
3 Modelli matematici per il sistema immunitario
3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Tolleranza mediata da linfociti T regolatori . . . . . . . . .
3.2.1 Derivazione del modello . . . . . . . . . . . . . . .
3.2.2 Analisi del modello . . . . . . . . . . . . . . . . . .
3.3 Tolleranza tramite la regolazione delle soglie di attivazione
3.3.1 Derivazione del modello . . . . . . . . . . . . . . .
3.3.2 Analisi del modello . . . . . . . . . . . . . . . . . .
3.4 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliografia
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
83
83
84
84
92
95
95
101
104
108
2
Introduzione
Nella descrizione di gran parte dei fenomeni nelle scienze applicate e in
molteplici aspetti dell’attività tecnica e industriale si fa uso di modelli matematici. Oltre che in fisica ed in chimica, la modellistica matematica è entrata
in discipline complesse come la finanza, la biologia, l’ecologia, la medicina.
Modellizzare un problema significa innanzitutto individuare le variabili e le
equazioni che descrivono il loro comportamento e le loro interazioni. Si cercano poi dei metodi per risolvere le equazioni (spesso in forma approssimata).
Si confrontano infine i risultati ottenuti dal modello con i dati sperimentali.
In particolare, in questo lavoro ci siamo occupati di modelli matematici in
medicina.
Esistono numerose applicazioni della matematica a varie branche delle scienze mediche come, ad esempio, nell’analisi dell’apparato cardiocircolatorio (in
particolare gli studi sull’elettrocardiogramma e sull’emodinamica), negli studi sulla diffusione di un virus in una popolazione, nella tomografia assiale
computerizzata, cioè la TAC (un importante strumento diagnostico che può
essere considerato come un’applicazione della trasformata di Radon).
In questa tesi consideriamo un’applicazione dei metodi della matematica allo
studio delle malattie autoimmuni, cioè di quel gruppo di patologie autoinfiammatorie causate dall’alterazione del sistema immunitario, che reagisce contro i
tessuti dell’organismo stesso. Più precisamente abbiamo voluto vedere quali
condizioni consentono il mantenimento dell’autotolleranza. Per analizzare
questo problema ci siamo serviti dello strumento dei sistemi dinamici. Nel
primo capitolo, infatti, introduciamo alcuni concetti fondamentali riguardanti i sistemi dinamici. Abbiamo distinto i sistemi dinamici in lineari e non
lineari. Abbiamo trattato, ad esempio, i concetti di punto di equilibrio e
di flusso. Ci siamo chiesti sotto quali condizioni i punti di equilibrio siano
stabili o instabili. Per i sistemi non lineari abbiamo studiato il problema di
esistenza ed unicità delle soluzioni e dell’intervallo massimale di esistenza,
descrivendo anche il metodo di rescaling del tempo per estendere l’intervallo massimale di esistenza delle soluzioni. Siamo poi passati allo studio dei
cicli limite, richiamando, tra l’altro, nel caso bidimensionale il teorema di
Poincarè - Bendixon ( che dà le condizioni per l’esistenza di orbite chiuse in
3
particolari sistemi) ed il teorema di Lienard (che stabilisce sotto quali condizioni un sistema ha un unico ciclo limite stabile).
Il secondo capitolo è dedicato principalmente allo studio delle biforcazioni.
Abbiamo analizzato biforcazioni in una e due dimensioni, fornendo, in entrambi casi, esempi di biforcazioni a nodo sella, transcritiche, a forcone ed
introducendo inoltre il teorema di biforcazione di Hopf. Ci siamo inoltre occupati del fenomeno del caos attraverso un esempio fornito da Lorenz.
Nel terzo capitolo abbiamo analizzato due modelli che cercano di descrivere i
processi che evitano che i linfociti autoreattivi causino malattie autoimmuni
in individui sani. Una delle proprieta fondamentali del sistema immunitario
è, per l’appunto, la sua capacità di evitare questo tipo di malattie. I meccanismi che stanno alla base di questo processo, conosciuto come autotolleranza, non sono ancora completamente compresi, ma sembrano coinvolgere il
controllo dello sviluppo clonale dei linfociti autoreattivi. Il rischio di autoimmunità non può essere dissociato dalla capacità del sistema immunitario
di far fronte ad agenti patogeni provenienti dall’esterno, il cui sviluppo è
solitamente molto veloce. Questa capacità si basa su una grande varietà di
recettori dell’antigene espressi da linfociti, che nel loro insieme sono capaci
di riconoscere ogni possibile antigene. La maggior parte dei linfociti ha un
unico recettore dell’antigene (ad esempio i recettori presenti nelle cellule T (i
TCR) sono quelli coinvolti nelle malattie autoimmuni). La generazione dei
recettori è il frutto di un complesso processo di ricombinazione casuale di
diversi segmenti genici presenti nel genoma di ogni linfocita. Questa casualità rende inevitabile il fatto che vengano creati anche linfociti con recettori
che riconoscono antigeni dell’organismo stesso. Questi linfociti autoreattivi
potenzialmente possono causare malattie autoimmuni se non si prevengono
la loro attivazione e la loro espansione clonale. Il problema ancora irrisolto è
quello di capire come venga evitata una risposta contro i tessuti dell’organismo negli individui sani.
A tal proposito, esistono diverse ipotesi di cui in questo lavoro di tesi ne sono
state considerate due. Secondo la prima ipotesi esistono specifiche cellule T
regolatrici che impediscono ai linfociti T autoreattivi di proliferare e di dare
origine ad una risposta immunitaria. Questa ipotesi sarebbe confermata, ad
esempio, da un esperimento condotto su alcuni animali che vengono privati
4
delle cellule T. Si è visto, infatti, che se in questi animali vengono trasferite
solo cellule T di tipo CD4 si ha lo sviluppo di malattie autoimmuni. Questo
non succede se invece agli animali viene trasmesso lo stesso numero di cellule
T di tipo CD4 e di cellule T sia CD4 che CD25.
L’altra ipotesi che abbiamo preso in considerazione è quella secondo la quale
le cellule T diventano non rispondenti agli autoantigeni attraverso la modifica del loro meccanismo di segnalazione delle cellule. Gli immunologi usano
la parola anergia per riferirsi a questa mancanza di risposta delle cellule, in
particolare quando questa si traduce in una diminuzione della risposta proliferativa. Tra le possibili spiegazioni di questa anergia, la più semplice si
basa sull’ipotesi che i linfociti modifichino le loro soglie di attivazione (TAT)
in risposta a stimoli ricorrenti. Per ogni modello abbiamo visto qual è
l’effetto dell’aumento della densità di cellule T sulla tolleranza ed abbiamo
studiato i corrispondenti spazi delle fasi, punti critici e biforcazioni. Si vede
che il secondo modello spiega solo in parte le osservazioni sperimentali sopra
accennate, mentre il primo è maggiormente in accordo con queste.
5
Capitolo 1
Sistemi dinamici
1.1
Introduzione
La dinamica oggi è una materia interdisciplinare, ma è nata come branca
della fisica. Le sue origini si possono far risalire al 1600, quando Newton
inventò le equazioni differenziali e scoprı̀ le leggi del moto e la gravitazione
universale. Newton risolse il problema dei due corpi, cioè quello di calcolare
il moto della terra attorno al sole. Le successive generazioni di matematici e
fisici tentarono di estendere i metodi analitici di Newton al problema dei tre
corpi (sole, terra, luna), ma questo problema risultava di difficile soluzione.
Dopo alcuni decenni si giunse alla conclusione che non è possibile ottenere
formule esplicite per il moto dei tre corpi. Un importante passo in avanti si
ebbe poi con Poincarè alla fine del 1800. Egli introdusse un nuovo punto di
vista, mettendo in evidenza le questioni qualitative piuttosto che quantitative. Ad esempio, anzichè chiedersi la posizione esatta dei pianeti ad ogni
istante di tempo, si chiese se il sistema solare sarebbe stato sempre stabile o
alcuni pianeti avrebbero eventualmente potuto allontanarsi verso l’infinito.
Poincarè fu anche il primo ad intravedere la possibilità del caos, nel quale
un sistema deterministico mostra un comportamento aperiodico che dipende
sensibilmente dalle condizioni iniziali, rendendo cosı̀ impossibili le previsioni
a lungo termine. L’invenzione del computer fu poi un passo determinante
per la storia della dinamica. Infatti, attraverso il computer, si riuscirono a
compiere degli esperimenti con le equazioni in una maniera che fino a quel
6
momento era impossibile, permettendo cosı̀ di sviluppare alcune intuizioni
sui sistemi non lineari.
1.2
Definizioni
Passiamo ora dalla storia alla struttura logica della dinamica. Si possono
distinguere due tipi principali di sistemi dinamici: i sistemi di equazioni differenziali (sistemi dinamici continui) e le mappe iterate (sistemi dinamici
discreti). I sistemi continui sono molto utilizzati per descrivere una grande
varietà di fenomeni, nelle scienze sociali, della vita, fisici, della terra ed in
ingegneria. La teoria dei sistemi continui ha applicazione in problemi di
economia, crescita di popolazioni, regolazione dei battiti cardiaci, reazioni
chimiche, ecc.
Un sistema dinamico continuo in un aperto non vuoto D ⊆ <n è un sistema
di equazioni differenziali del tipo:
x˙1 = f1 (x1 , ..., xn )
..
.
x˙n = fn (x1 , ..., xn )
che può essere scritto con una notazione più compatta come:
ẋ = f (x),
dove f : D −→ <n , f ∈ C 1 (D), dunque f è un campo vettoriale.
Definizione 1 Una soluzione di un sistema dinamico continuo è una funzione x(t) a valori in D che soddisfa identicamente per ogni t ∈ < l’equazione
differenziale ẋ = f (x(t))
Definizione 2 Le curve di <n corrispondenti alle soluzioni del sistema rappresentate dalle n-ple (x1 (t), ..., xn (t)) vengono dette traiettorie o orbite.
Definizione 3 Un punto a ∈ D è detto punto di equilibrio o punto critico
dell’equazione ẋ = f (x) se f (a) = 0.
7
Figura 1.1:
Definizione 4 Un punto di equilibrio a si dice stabile se
∀² > 0, ∃δ > 0 : kx0 − ak < δ ⇒ kx(t) − ak < ², ∀t ≥ 0.
Definizione 5 Il punto di equilibrio a è instabile se non è stabile.
Definizione 6 Un punto critico x=a dell’equazione in D è detto attrattore
positivo se esiste un intorno Ω ⊆ D di x=a tale che x(t0 ) ∈ Ω =⇒ limt→∞ x(t) =
a.
Definizione 7 Un punto di equilibrio che è un attrattore ed è stabile è detto
asintoticamente stabile.
Definizione 8 Se a è un punto di equilibrio, si dice bacino di attrazione
di a l’insieme A delle condizioni iniziali tali che le corrispondenti soluzioni
abbiano a come punto limite.
Definizione 9 Un punto di equilibrio è detto globalmente asintoticamente
stabile se il suo bacino di attrazione è tutto l’insieme D.
Possiamo fare un’ulteriore classificazione per i sistemi dinamici, distinguendoli tra sistemi lineari e non lineari.
8
1.3
Sistemi dinamici lineari
Un sistema lineare omogeneo di equazioni differenziali ordinarie ha la forma:
ẋ = Ax,
(1.1)
dove x ∈ <n e A è una matrice n × n e
dx1
dt
.
˙ =
x(t)
.. .
dxn
dt
Se consideriamo il sistema lineare (1.1) unitamente alla condizione iniziale
x(0) = x0 otteniamo il seguente problema ai valori iniziali:
ẋ = Ax
x(0) = x0
Si può mostrare che la soluzione di questo problema è data da
x(t) = eAt x0 .
Dobbiamo naturalmente dare un significato all’esponenziale di matrice.
1.3.1
Esponenziale di operatori
Per definire l’esponenziale di un operatore lineare T : <n → <n è necessario
definire il concetto di convergenza nello spazio lineare L(<n ) degli operatori
lineari in <n . Questa definizione può essere data usando l’operatore norma
di T definito da:
kT k = max|x|≤1 |T (x)| ,
dove |x| è la norma euclidea di x ∈ <n , cioè:
|x| =
q
x21 + . . . + x2n .
Risultano verificate le proprietà di una norma, cioè per S, T ∈ L(<n ) si ha:
kT ≥ 0 e kT k = 0 sse T = 0,
kkT k = |k| kT k per k ∈ <
kS + T k ≤ kSk + kT k .
9
Definizione 10 Una successione di operatori lineari Tk ∈ L(<n ) converge
ad un operatore T ∈ <n per k → ∞, cioè
limk→∞ Tk = T
se ∀² > 0 ∃N : ∀k ≥ N, kT − Tk k < ².
Può essere mostrato che valgono inoltre le seguenti
Proprietà
|T (x)| ≤ kT k kxk , ∀x ∈ <n ,
(1.2)
kT Sk ≤ kT k kSk
(1.3)
° °
° k°
k
°T ° ≤ kT k per k = 0, 1, 2, . . .
(1.4)
Teorema 1 Dato T ∈ L(<n ) e t0 > 0 la serie
∞
X
T k tk
k=0
k!
è assolutamente convergente per ∀t : |t| ≤ t0 .
Dimostrazione
Per dimostrare questo teorema utilizzeremo il test di Weierstrass, cioè:
P
data la serie di funzioni ∞
n=1 fn (x), con fn (x) limitate in un intervallo I,
P
sia Mn = supx∈I |fn (x)| e si consideri la serie numerica ∞
n=1 Mn ,allora
P∞
P∞
⇒ n=1 fn (x) converge assolutamente e uniformen=1 Mn convergente
mente in I
Partiamo quindi con la dimostrazione del teorema.
Sia kT k = a. Otteniamo, per |t| ≤ t0 ,
° °¯ ¯
°
°
° k° ¯ k¯
° T k tk °
°T ° ¯t ¯
ak tk0
°
°
°≤
≤
,
°
° k! °
k!
k!
dove nella prima disuguaglianza abbiamo utilizzato la proprietà (1.3). Osservando che
∞
X
ak tk0
= eat0
k!
k=0
10
segue dal test di Weierstrass che la serie
gente per ogni t: |t| ≤ t0 .
P∞
k=0
T k tk
k!
è assolutamente conver-
L’esponenziale di un operatore lineare T è allora definito dalla serie assolutamente convergente:
∞
X
Tk
.
eT =
k=0 k!
Segue dalle proprietà dei limiti che e°T è°un operatore lineare in <n e segue
° °
dalla dimostrazione del teorema che °eT ° ≤ ekT k . Poichè ciò che ci interessa
in questo paragrafo è la soluzione dei sistemi lineari della forma ẋ = Ax
assumiamo che la trasformazione lineare T in <n sia rappresentata in qualche
base dalla matrice A e diamo la seguente
Definizione 11 Sia A una matrice n × n. Allora per t ∈ <, eAt =
P∞
k=0
Ak tk
k!
Enunciamo ora alcune proprietà dell’esponenziale di operatori lineari:
• proprietà 1 Se P ed A sono trasformazioni lineari in <n allora eP AP
P eA P −1
−1
=
• proprietà 2 Se A e B sono trasformazioni lineari in <n , che commutano, cioè che soddisfano AB=BA, allora eA+B = eA eB
• proprietà 3 Se A è una trasformazione lineare in <n , l’inversa della
trasformazione lineare eA è data da: (eA )−1 = e−A
1.3.2
Teorema fondamentale per i sistemi lineari
Sia A una matrice n × n. Vogliamo far vedere che per x0 ∈ <n il problema
ai valori iniziali
ẋ = Ax
.
x(0) = x
0
ha una e una sola soluzione ∀t ∈ <, data da x(t) = eAt x0
Per la dimostrazione di questo teorema abbiamo bisogno di calcolare la
derivata della funzione esponenziale eAt . Lo faremo attraverso il seguente
11
Lemma 1 Sia A una matrice quadrata, allora
d At
e = AeAt .
dt
Dimostrazione
Utilizzando la definizione 10, l’uniforme convergenza e la proprietà 2 otteniamo:
d At
eA(t+h ) − eAt
eAt eAh − eAt
e = limh→0
= limh→0
dt
h
h
eAh − I
= e limh→0
= eAt limh→0
h
At
(Ah)2
P∞
i=0
(Ah)i
i!
h
−I
(Ah)n
+ . . . + n! + . . . − I
h
Ã
!
2
n n−1
A
h
A
h
= eAt limh→0 A +
+ ... +
+ . . . = eAt A
2
n!
= eAt limh→0
I + Ah +
2!
Teorema 2 Teorema fondamentale per i sistemi lineari Sia A una
matrice n × n. Allora dato x0 ∈ <n , il problema ai valori iniziali
ẋ = Ax
x(0) = x0
(1.5)
ammette una e una sola soluzione data da x(t) = eAt x0 .
Dimostrazione
Verifichiamo innanzitutto che x = eAt x0 è una soluzione. Utilizzando il
lemma precedente otteniamo:
ẋ =
d At
(e x0 ) = AeAt x0 = Ax, ∀t ∈ <.
dt
Abbiamo inoltre:
x(0) = Ix0 = x0 .
12
Per mostrare che questa è l’unica soluzione, supponiamo che y(t) sia una
qualsiasi soluzione del problema ai valori iniziali, dunque y(0) = x0 , e poniamo:
z(t) = e−At y(t).
Dal lemma precedente e dal fatto che y(t) è soluzione di (1.5) segue:
ż(t) = −Ae−At y(t) + e−At ẏ = −Ae−At y(t) + e−At Ay(t) = 0
per ogni t ∈ <, poichè e−At e A commutano. z(t) risulta quindi essere
costante; otteniamo quindi
z(t) = z(0) = y(0) = x0 ⇒ x0 = e−At y(t) ⇒ y(t) = eAt x0 = x(t).
Allora x(t) è l’unica soluzione
1.3.3
Forma di Jordan
Per vedere che forma può avere la soluzione di un sistema lineare di equazioni
differenziali è utile introdurre la forma canonica di Jordan di una matrice A.
Diamo prima la seguente definizione
Definizione 12 Si dice autovettore generalizzato di ordine k associato al(k)
l’autovalore λi un qualunque vettore vi tale che
(k)
o
n
vi
∈ Ker (A − λi I)k ,
(k)
∈
/ Ker (A − λi I)k−1 .
vi
n
o
Teorema 3 Sia A una matrice reale con k autovalori reali λj , j=1,..,k e
n−k
autovalori complessi λj = aj + ibj e λj = aj − ibj con j = k +
2
1, ..., k + n−k
. Allora esiste una base v1 , ...vk , vk+1 , uk+1 , ..., vk+s , uk+s di <n
2
e wj = vj + iuj , j=k+1,...,n sono autovetdove vj , j = 1, ..., k + n−k
2
tori generalizzati di A, rispettivamente reali e complessiDefinita la matrice
P = [v1 , ...vk , vk+1 , uk+1 , ..., vk+s , uk+s ], essa è invertibile e
B1
...
P −1 AP =
Br
13
,
dove i blocchi elementari di Jordan Bi , i=1,...,r sono della forma
λ
1
0
... 0
0
B=
0
λ
1
... 0
...
... ...
λ
0 ... ...
0
,
1
(1.6)
λ
se λ è uno degli autovalori reali di A, oppure della forma
I2
0
...
0
0
B=
0
D
I2
...
0
0
con D =
a
b
−b a
D
,I2 =
1 0
0 1
...
... ... D
... ...
0
e 0=
I2
(1.7)
D
0 0
0 0
se λ = a + ib è uno degli autovalori complessi di A. Per ogni autovalore λ il
numero di blocchi di una data dimensione può essere determinato a partire
dalla dimensione degli spazi nulli di (A − λI)j , j=1,...,mλ , dove mλ indica
la molteplicità algebrica di λ. La forma canonica di Jordan di una matrice
A è unica a meno dell’ordine dei blocchi elementari e del fatto che gli 1 nel
blocchi di tipo (1.6) possono apparire o sopra o sotto la diagonale principale,
cosı̀ come le I2 nei blocchi di tipo (2.7).
La forma canonica di Jordan di una matrice A dà alcune informazioni esplicite
riguardo la forma della soluzione del problema di Cauchy:
ẋ = Ax
x(0) = x
0
14
Infatti eAt = P eBt P −1 . Se Bj = B è una matrice m × m della forma (1.6) e
λ reale è un autovalore di A, allora B = λI + N con
0
0
N =
...
0
0
e
0 ... 0
0
1 ... 0
...
0
...
0
Bt
e
λt N t
=e e
λt
=e
1
1
0
0
...
0
0
1
1
t
t2
2!
...
1
t
...
0
1 ...
tm−1
(m−1)!
tm−2
(m−2)!
tm−3
(m−3)!
...
1
t
...
0
1
poichèla matrice N è nilpotente
di ordine m e
0 0 1 0 ... 0
0 0 ... 0
0
N2 =
0
0
0 0 ... 0
1 ... 0
,...,N m−1 =
,
1
0
0 ... ...
0
0
...
...
Allo stesso modo, se Bj = B è una matrice 2m × 2m della forma (1.7) e
λ = a + ib è un autovalore complesso di A, allora
Bt
e
2
R Rt Rt2! . . .
0 R Rt . . .
0
=
0
0
R
...
...
Rtm−1
(m−1)!
Rtm−2
(m−2)!
Rtm−3
(m−3)!
...
...
R
Rt
0 ...
0
R
dove R è la matrice di rotazione
R=
cosbt −sinbt
sinbt
15
cosbt
,
poichèla matrice 2m × 2m è nilpotente
di ordine
me
0 0 . . . 0 I2
0 0 I2 0 . . . 0
0
2
N =
0
0
I2 . . .
0 0 ...
0
m−1
=
,...,N
0
0 ... ...
0
Abbiamo quindi il seguente
...
0
0
.
...
Corollario 1 Ogni coordinata della soluzione x(t) è una combinazione lineare di funzioni della forma eat tk cosbt ed eat tk sinbt con 0 ≤ k ≤ n − 1.
Osserviamo infine che una
forma canonica
matriceA2 × 2 nella
di Jordan
λ1 0
λ 0
λ 1
a b
,
o
,
a
può essere scritta come
0 λ2
0 λ
0 λ
−b a
seconda che A abbia due autovalori reali e distinti, reali e coincidenti con
molteplicità geometrica rispettivamente 2 e 1, complessi coniugati.
Ricordiamo che si dice molteplicità algebrica la molteplicità di un autovalore
λ̄ come radice del polinomio det(A − λI). La moleplicità geometrica invece
è la dimensione dell’autospazio relativo all’autovalore λ̄
1.3.4
Teoria della stabilità
Introduciamo ora il concetto di flusso per un sistema di equazioni differenziali
lineare. Come sappiamo dal teorema fondamentale per i sistemi lineari, la
soluzione del problema ai valori iniziali
ẋ = Ax
x(0) = x
0
(1.8)
è data da x(t)=eAt x0 . La famiglia di mappe ad un parametro eAt : <n →
<n è detta flusso del sistema lineare (1.8).
Definizione 13 Se tutti gli autovalori della matrice n × n A hanno parte
reale diversa da zero, allora il flusso eAt : <n → <n è detto flusso iperbolico
ed il sistema (1.8) è detto sistema lineare iperbolico.
Teorema 4 Le seguenti affermazioni sono equivalenti:
¯
¯
¯
¯
(a) Per ogni x0 ∈ <n , limt→∞ eAt x0 = 0 e per x0 6= 0, limt→−∞ ¯eAt x0 ¯ = ∞
16
(b) Tutti gli autovalori di A hanno parte reale negativa.
(c) Esistono delle costanti positive a,c, m ed M ed una costante k ≥ 0 tali
che per ogni x0 ∈ <n si ha
¯ ¯
¯
¯
¯
¯
m ¯¯tk ¯¯ e−at |x0 | ≤ ¯¯eAt x0 ¯¯ , t ≤ 0e ¯¯eAt x0 ¯¯ ≤ M e−ct |x0 | , t ≥ 0.
Dimostrazione (a) ⇒ (b): se uno degli autovalori λ = a + ib ha parte reale
positiva, a > 0, ¯ allora¯ dal teorema 3 e dal¯ corollario
1 esiste un x0 ∈ <n ,
¯
x0 6= 0, tale che ¯¯eAt x0 ¯¯ ≥ eat |x0 |. Dunque ¯¯eAt x0 ¯¯ → ∞ per t → ∞, cioè
limt→∞ eAt x0 6= 0.
Se uno degli autovalori di A ha parte reale zero, diciamo λ = ib, allora dal
corollario 1 esisterà un x0 ∈ <n tale che eAt x0 non tende a zero per t → ∞,
cioè (a) ⇒ (b).
(b) ⇒ (c): si dimostra considerando che, se x(t) è soluzione del problema
ẋ = Ax allora, come abbiamo visto, ogni sua componente è combinazione
lineare di funzioni della forma eat tk cosbt e eat tk sinbt con 0 ≤ k ≤ n − 1, cosı̀
come x(t)
, dunque si ha:
|x0 |
tk1 ea1 t (c1 cosb1 t + d1 sinb1 t) + ... + tkp eap t (cp cosbp t + dp sinbp t)
a1 , ..., ap parte reale degli autovalori di A,
b1 , ..., bp parte immaginaria degli autovalori di A. Consideriamo c̄ tale che
0 > c̄ > maxai , allora ai − c̄ < 0 per ogni i=1,...,p. Sia c = −c̄ > 0.
Mettiamo in evidenza e−ct e prendiamo il modulo:
¯n
o¯
e−ct ¯¯ tk1 e(a1 −c̄)t (c1 cosb1 t + d1 sinb1 t) + ... + tkp e(ap −c̄)t (cp cosbp t + d1 sinbp t) ¯¯
o
n
≤ e−ct tk1 e(a1 −c̄)t (|c1 | + |d1 |) + ... + tkp e(ap −c̄)t (|cp | + |dp |) , t ≥ 0
La funzione tra parentesi graffe è continua nell’intervallo [0, +∞) ed inoltre
tende a zero per t → ∞, dunque è limitata. Allore esiste M̄i > 0 tale che
|xi (t)|
≤ e−ct M̄i e dunque esiste M tale che
|x0 |
¯
¯
¯ At ¯
¯e x0 ¯ ≤ M e−ct |x0 | .
(c) ⇒ (a): basta calcolare i limiti, rispettivamente per t → −∞ e per
t → +∞, delle due disuguaglianze scritte al punto (c).
Si può provare anche il seguente teorema:
17
Teorema 5 Il punto di equilibrio 0 del sistema dinamico ẋ = Ax (con det
A6=0) è:
• globalmente asintoticamente stabile se e solo se tutti gli autovalori di
A hanno parte reale negativa;
• stabile ma non asintoticamente stabile se aj ≤ 0 per ogni j=1,...,m+s
e tutti gli autovalori con parte reale nulla hanno molteplicità algebrica
e geometrica uguali;
• instabile in tutti gli altri casi.
1.3.5
Sistemi lineari in due dimensioni
Negli spazi delle fasi unidimensionali il flusso è estremamente limitato. Tutte
le traiettorie sono costrette a muoversi monotonicamente o a rimanere costanti. Negli spazi delle fasi in più dimensioni le traiettorie hanno più spazio a
disposizione e dunque si ha un più ampio raggio d’azione per i comportamenti
dinamici.
Per dare un esempio concreto del comportamento dei sistemi lineari, consideriamo quelli in due dimensioni.
Un sistema lineare in due dimensioni è un sistema della forma:
ẋ = ax + by
ẏ = cx + dy
che può essere scritto in forma più compatta come:
ẋ = Ax
con A matrice 2x2, supponiamo inoltre che A sia non singolare.
Un sistema di questo tipo è lineare nel senso che se x1 e x2 sono soluzioni
allora ogni loro combinazione lineare c1 x1 + c2 x2 è soluzione.
Notiamo che ẋ = 0 quando x=0, quindi x∗ = 0 è sempre un punto fisso
indipendentemente dalla scelta di A.
18
Questi sistemi sono interessanti perchè giocano un ruolo importante nella
classificazione dei punti fissi dei sistemi non lineari. Ponendo y = T −1 x si ha
ẏ = T −1 ẋ = T −1 Ax = T −1 AT y, ed il sistema si può ricondurre sempre ad
uno in cui A è della forma di Jordan. Per analizzare i punti critici del sistema
lineare determiniamo innanzitutto gli autovalori di A. Come abbiamo detto,
esisterà una matrice non singolare T tale che T −1 AT è nella cosiddetta forma
di Jordan. Il comportamento delle soluzioni risulta molto diverso, in base ai
valori di λ1 e λ2 . Abbiamo i seguenti casi:
• Nodo
Gli autovalori sono
Seλ1 6=λ2 la forma
hanno lo stesso segno.
reali ed
0
1
λ1 0
e in questa
e
con autovettori
canonica di A è
1
0
0 λ2
forma si hanno le soluzioni reali:
x1 (t) = c1 eλ1 t
(1.9)
x2 (t) = c2 eλ2 t
(1.10)
e
Ricaviamo t dalle equazioni (1.10) e (1.11):
x1
c1
x2
c2
= eλ1 t
= eλ2 t
⇒
log
log
³
´
x1
³ c1 ´
x2
c2
= λ1 t
= λ2 t
⇒
t=
t=
1
log xc11
λ1
1
log xc22
λ2
Eguagliando le due espressioni ottenute per t otteniamo:
x1
1
x2
x1
1
log
=
log
⇔ log
λ1
c1
λ2
c2
c1
µ
¶
1
λ1
x2
= log
c2
µ
¶
1
λ2
x1
⇔
c1
µ
¶
1
λ1
x2
=
c2
µ
¶
elevando a λ1 entrambi i membri ricaviamo:
x 2 λ1
x1
= ( ) λ2 ,
c1
c2
quindi in conclusione otteniamo la seguente equazione:
λ1
x1 = c(x2 ) λ2 ,
con c costante. Dunque nel piano delle fasi troviamo delle orbite che
hanno a che fare con le parabole. Chiamiamo un punto critico di questo
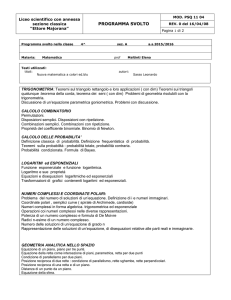
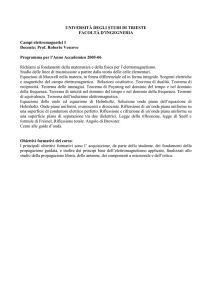
tipo nodo. Il punto (0,0) è stabile se gli autovalori sono negativi (Figura
1.2), instabile se sono positivi(Figura 1.3)).
19
1
λ2
Figura 1.2:
Figura 1.3:
20
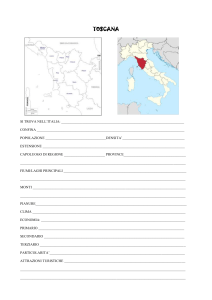
Figura 1.4:
• Punto sella
Gli autovalori λ1 e λ2 sono reali ed hanno
segni
opposti. Anche in
λ1 0
Le soluzioni sono di
questo caso la matrice A è della forma
0 λ2
nuovo della forma data dall’equazione (1.9). Nel piano di fase le orbite
sono ancora date da:
λ
1
x1 = cx2λ2
con c costante. Stavolta però λλ12 < 0 e quindi il comportamento delle
orbite è iperbolico (Figura 1.4). Tra le soluzioni ce ne sono cinque
particolarmente semplici: il punto critico (0,0) e i quattro semiassi.
Notiamo che ci sono due soluzioni con la proprietà (x1 (t), x2 (t)) →
(0, 0) per t → ∞ e due soluzioni con questa proprietà per t → −∞.
• Nodo a stella Gli autovalori sono reali e coincidenti:λ1 = λ2= λ con
λ 0
con aumolteplicità geometrica 2. La forma canonica di A è:
0 λ
tovettori
1
0
e
. Le orbite sono date da x1 = cx2 . Se λ < 0
0
1
l’origine è detta nodo a stella stabile (Figura 1.5). Se λ > 0 l’origine è
21
Figura 1.5:
detta nodo a stella instabile (Figura 1.6).
Osserviamo che se gli autovalori sono reali e coincidenti
con molteplic
λ 1
Anche
ità geometrica 1, la forma canonica della matrice A è
0 λ
in questo caso se λ < 0 l’origine è un nodo stabile con ritratto di fase
mostrato in figura 1.7 e se λ > 0 l’origine è un nodo instabile (Figura
1.8).
• Fuoco
Gli autovalori λ1 e λ2 sono complessi
coniugati,
λ1,2 = a ± ib con ab 6=
a b
Le soluzioni complesse sono
0. La forma canonica di A è
−b a
della forma e(a±ib)t . Una combinazione lineare delle soluzioni complesse
produce soluzioni reali indipendenti della forma eat cos(bt) , eat sin(bt).
Le orbite si muovono a spirale in dentro o in fuori rispetto a (0,0). (0,0)
è detto fuoco.
Se a < 0 e b > 0 la soluzione si muove a spirale verso l’origine in senso
22
Figura 1.6:
Figura 1.7:
23
Figura 1.8:
antiorario. In questo caso l’origine è detta fuoco stabile (Figura 1.9).
Se invece a > 0 e b > 0 la soluzione ruota in verso antiorario, attorno
all’origine allontanandosi da essa e l’origine è un fuoco instabile (Figura
1.10). Se b < 0 la rotazione avviene in senso orario.
• Centro
In questo caso speciale gli autovalori sono puramente immaginari: λ1 =
bi e λ2 = −bi. Il punto (0,0) è detto centro. Le soluzioni possono
essere scritte come combinazione lineare di cos(ωt) e sin(ωt); le orbite
nel piano di fase sono circonferenze. (0,0) non è attrattivo ma è stabile.
1.4
Sistemi dinamici non lineari
I sistemi dinamici non lineari risultano più complessi di quelli lineari poichè,
nella maggior parte dei casi, non è possibile risolverli analiticamente. D’altra
parte però è possibile ricavare informazioni qualitative sul comportamento
locale delle soluzioni. L’interesse per i sistemi non lineari deriva dal fatto che
questo tipo di sistemi permette di modellizzare fenomeni fisici, biologici, ecc.
24
Figura 1.9:
Figura 1.10:
25
che non possono essere studiati attraverso sistemi lineari.
Un sistema non lineare di equazioni differenziali è un sistema del tipo:
ẋ = f (x)
dove f : D → <n e D è un sottoinsieme aperto di <n .
Possiamo distinguere i sistemi non lineari in autonomi o non autonomi a
seconda che la funzione f dipenda espicitamente dal tempo oppure no. I
sistemi autonomi saranno dunque dati da ẋ = f (x), mentre per i sistemi
non autonomi avremo ẋ = f (x, t). Per un sistema non lineare non si ha in
linea di massima la possibilità di trovare soluzioni esplicite, e perciò le rappresentazioni grafiche risultano spesso migliori delle formule per analizzare
questo tipo di sistemi. Vediamolo con un esempio nel caso unidimensionale
(interpreteremo un’equazione differenziale come un campo vettoriale).
Diamo prima la seguente definizione:
Definizione 14 Consideriamo l’equazione
ẋ = f (x)
con x(t) funzione a valori reali del tempo t, f(x) funzione regolare a valori
reali di x. Chiamiamo le equazioni di questo tipo sistemi ad una dimensione.
Esempio 1
Consideriamo la seguente equazione differenziale non lineare:
ẋ = sin(x)
Supponiamo che t sia il tempo, x la posizione di una immaginaria particella
che si muove lungo la retta reale, e ẋ la velocità di questa particella. Allora
l’equazione differenziale ẋ = sin(x) rappresenta un campo vettoriale sulla
retta : determina il vettore velocità ẋ per ogni x. Consideriamo il piano(x, ẋ)
e indichiamo sull’asse x il corrispondente vettore velocità ad ogni x mediante
delle frecce. Le frecce saranno dirette verso destra quando ẋ > 0 e verso
sinistra quando ẋ < 0.
Possiamo pensare in modo un po’ più fisico a questo campo vettoriale
immaginando che un fluido stia scorrendo in modo stazionario lungo l’asse x
con velocità che varia da punto a punto in accordo con la legge ẋ = sin(x).
26
Figura 1.11:
Come è mostrato in figura 1.11 il flusso è verso destra quando ẋ > 0 e
verso sinistra quando ẋ < 0. Nei punti in cui ẋ = 0 non c’è flusso. Questi
punti sono detti punti fissi. Ci sono due tipi di punti fissi (come si può
vedere dalla figura 1.11): i punti in nero rappresentano punti fissi stabili,
mentre i cerchi aperti rappresentano punti fissi instabili. A questo punto
tenendo conto della figura precendente, possiamo capire il comportamento
delle soluzioni dell’equazione differenziale ẋ = sin(x). Facciamo partire la
nostra particella immaginaria da x0 e vediamo come viene trasportata dal
flusso. Possiamo rispondere alle seguenti domande:
• Supponiamo che x0 = π4 ; descrivere le caratteristiche qualitative della
soluzione x(t) per ogni t > 0. In particolare cosa accade quando t →
∞?
Dalla figura 1.11 vediamo che una particella che parte da x0 = π4 si
muove sempre più velocemente verso destra finchè non attraversa x = π2
(dove la funzione sin x raggiunge il suo massimo). Poi la particella
inizia a rallentare e tende ad avvicinarsi al punto fisso stabile x = π
da sinistra. La forma qualitativa della soluzione è mostrata in figura
1.12. Notiamo che la curva è prima concava verso l’alto e poi concava
27
Figura 1.12:
verso il basso. Questo corrisponde all’accelerazione iniziale per x <
seguita dalla decelerazione verso x = π.
π
2
• Per una condizione iniziale arbitraria x0 , qual è il comportamento di
x(t) per t → ∞?
Lo stesso ragionamento di prima si applica ad ogni condizione iniziale
x0 . La figura(1.11) mostra che se inizialmente ẋ > 0, la particella va
verso destra e asintoticamente tende al punto fisso stabile più vicino.
Allo stesso modo, se inizialmente ẋ < 0, la particella tende al punto
fisso più vicino alla sua sinistra. Se ẋ = 0 allora x rimane costante.
La forma qualitativa della soluzione per qualsiasi condizione iniziale è
mostrata in figura 1.13.
Le idee appena sviluppate possono essere estese ad un qualunque sistema unidimensionale ẋ = f (x). Disegnamo il grafico di f(x) e come
prima immaginiamo che un fluido stia scorrendo lungo la retta reale
con una velocità locale f(x).
Questo fluido immaginario è chiamato fluido di fase e la retta reale
è lo spazio di fase.Il flusso è verso destra quando f (x) > 0 ed è verso sinistra quando f (x) < 0. Per trovare la soluzione di ẋ = f (x)
partendo da una condizione iniziale arbitraria x0 , posizioniamo una
particella immaginaria (detta punto di fase) in x e vediamo come viene
portata avanti dal flusso. Man mano che il tempo va avanti, il punto di fase si muove lungo l’asse x in accordo con una certa funzione
x(t). Questa funzione, come abbiamo visto, si chiama traiettoria per
x0 , e rappresenta la soluzione dell’equazione differenziale partendo dal28
Figura 1.13:
la condizione iniziale x0 . Una figura come la 1.14, che mostra tutte le
traiettorie qualitativamente differenti del sistema, è chiamata ritratto
di fase. L’aspetto del ritratto di fase è controllato dai punti fissi x∗ ,
definiti, come ricordiamo, da f (x∗ ) = 0, che corrispondono ai punti di
stasi del flusso. In termini dell’equazione differenziale originaria, i punti
fissi rappresentano le soluzioni di equilibrio (alcune volte dette stazionarie, costanti, o soluzioni di riposo, poichè se x = x∗ inizialmente allora
x(t) = x∗ per ogni t). Come abbiamo visto, un equilibrio si dice stabile
se tutti i disturbi sufficientemente piccoli che allontanano il sistema da
esso si estinguono in tempo. Gli equilibri stabili sono rappresentati geometricamente da punti fissi stabili. Al contrario, gli equilibri instabili,
nei quali i disturbi crescono nel tempo, sono rappresentati da punti fissi
instabili.
Consideriamo ora un esempio in cui analizziamo un sistema lineare:
29
Figura 1.14:
Esempio 2. Crescita di una popolazione
Il modello più semplice per la crescita di una popolazione di organismi
è
Ṅ = rN,
dove N(t) è la popolazione al tempo t, e r > 0 è il tasso di crescita.
Questo modello predice una crescita esponenziale:
N (t) = N0 exprt ,
dove N0 è la popolazione al tempo t = 0. Naturalmente questa crescita
esponenziale non potrà andare avanti per sempre. Per modellare gli
effetti di sovraffollamento e risorse limitate, si assume spesso che il tasso
di crescita pro capite Ṅ
decresce quando N diventa sufficientemente
N
grande, come mostrato in figura 1.15.
Per N piccoli il tasso di crescita è r, come prima. Per popolazioni più
grandi di una certa capacità di carico K il tasso di crescita diventa
negativo; l’indice di morte è più alto di quello di natalità. Un modo
conveniente per esprimere queste idee dal punto di vista matematico
è quello di assumere che il tasso di crescita pro capite Ṅ
descresca
N
linearmente con N (Figura 1.16).
Questo conduce all’equazione logistica:
Ṅ = rN (1 −
30
N
).
K
Figura 1.15:
Figura 1.16:
31
Figura 1.17:
Consideriamo il piano (N, Ṅ ) e nel grafico consideriamo solo gli N ≥ 0
poichè non ha senso considerare popolazioni negative. Ponendo Ṅ = 0
e risolvendo rispetto ad N si ottengono due punti fissi: in N ∗ = 0 ed in
N ∗ = K.
Analizzando il flusso in figura 1.17 vediamo che N ∗ = 0 è un punto fisso
instabile, mentre N ∗ = K è un punto fisso stabile. In termini biologici,
N ∗ = 0 è un equilibrio instabile: una piccola popolazione crescerà in
maniera esponenzialmente veloce allontanandosi da N=0.
D’altra parte, se N è disturbato debolmente dal valore K, il disturbo
decadrà monotonicamente e N (t) → K per t → ∞. Infatti la figura
1.17 mostra che se avviamo un punto di fase a qualche N0 > 0 scorrerà
sempre verso N=K. Quindi la popolazione raggiunge sempre la capacità di carico. L’unica eccezione si ha per N0 = 0; in questo caso, non
essendoci alcun organismo per iniziare la riproduzione si avrà N=0 per
ogni t. La figura 1.17 ci consente inoltre di dedurre la forma qualitativa
delle soluzioni. Per esempio, se N0 < K2 , il punto di fase si muove
sempre più velocemente finchè non incrocia N = K2 , dove la parabola
in figura 1.17 raggiunge il suo massimo. In seguito il punto di fase
rallenta ed alla fine si avvicina verso N=K. In termini biologici questo
significa che inizialmente la popolazione cresce in maniera accelerata e
il grafico di N(t) è concavo verso l’alto. Dopo N = K2 invece, la derivata
32
Figura 1.18:
Ṅ cominicia a decrescere, e dunque N(t) è concavo verso il basso e tende
asintoticamente alla linea orizzontale N=K (Figura 1.18).
Di conseguenza il grafico di N(t) è a forma di S per N0 < K2 . Qualcosa
di qualitativamente diverso succede se la condizione iniziale N0 si trova tra K2 e K, in questo caso le soluzioni decelerano rispetto al punto
di partenza. Dunque queste soluzioni sono concave verso il basso per
ogni t. Se la popolazione inizialmente supera la capacità di carico K,
N0 > K, allora N(t) decresce verso N=K ed il grafico è concavo verso
l’alto. Infine, se N0 = 0 o N0 = K allora la popolazione resta costante.
1.4.1
Teorema fondamentale di esistenza ed unic-
ità
Teorema 6 Sia D un sottoinsieme aperto di <n contenente x0 e sia
f ∈ C 1 (D). Allora ∀x0 ∈ D esisteranno un a > 0 e un δ > 0 tali che
33
il problema ai valori iniziali
ẋ = f (x)
x(0) = y
ha una e una sola soluzione nell’intervallo [−a, a], ∀y ∈ Bδ (x0 ).
Prima di procedere con la dimostrazione del teorema abbiamo bisogno
di introdurre alcuni concetti.
Definizione 15 La funzione f : D → <n è differenziabile in x0 ∈ D
se esiste una trasformazione lineare Df (x0 ) ∈ L(<n ) tale che
lim|h|→0
|f (x0 + h) − f (x0 ) − Df (x0 )h|
=0
|h|
∀h ∈ <n : x0 + h ∈ D
Df (x0 ) è detta derivata di f in x0 .
Teorema 7 Se f : <n → <n è differenziabile in x0 allora esistono le
∂fi
(x0 ) i,j,=1,...,n e ∀x ∈ <n
derivate parziali ∂x
j
(Df (x0 )x)i =
n
X
∂fi
j=1
∂xj
(x0 )xj .
La derivata Df è data dalla matrice jacobiana n × n Df =
h
∂fi
∂xj
i
Definizione 16 Sia f ∈ C(D) dove D è un sottoinsieme aperto di <n .
Allora x(t) è una soluzione dell’equazione differenziale ẋ = f (x) su un
intervallo I sse x(t) è differenziabile su I e ∀t ∈ I, x(t) ∈ D e
ẋ(t) = f (x(t)).
Inoltre dato x0 ∈ D, se si ha anche x(0) = x0 , x(t) è una soluzione del
problema ai valori iniziali
ẋ = f (x)
x(0) = x0 .
34
Definizione 17 Sia D un aperto di <n . Una funzione f : D → <n si
dice lipschitziana su D se esiste una costante k > 0 tale che ∀x, y ∈ D
|f (x) − f (y)| ≤ k |x − y| .
f è detta localmente lipschitziana se ∀x0 ∈ E esiste un intorno di x0
N² (x0 ) e una costante k0 > 0, che dipende da x0 tali che ∀x, y ∈ N² (x0 )
si ha
|f (x) − f (y)| ≤ k0 |x − y|
Naturalmente N² (x0 ) è dato da:
N² (x0 ) = {x ∈ <n : |x − x0 | < ²} .
Lemma 2 Sia D un aperto di <n e f : D → <n . Allora se f ∈ C 1 (D),
f è localmente lipschitziana.
Lemma 3 Lemma di Gronwall
Sia g : [−a, a] → < una funzione continua e non negativa e sia
¯Z
¯
g(t) ≤ c + k ¯¯
t
0
con c,k costanti positive. Allora
¯
¯
g(τ )dτ ¯¯ , ∀t ∈ [−a, a]
g(t) ≤ cek|t|
∀t ∈ [−a, a]
Torniamo ora alla dimostrazione del teorema 6
Dimostrazione
Fissiamo x0 ∈ D. Per ipotesi f ∈ C 1 (D), dunque f è localmente
lipaschitziana, allora esiste B² (x0 ) ⊂ D e una costante K > 0 tale che
∀x, y ∈ B² (x0 ) si ha
|f (x) − f (y)| ≤ K |x − y| .
Definiamo ora:
C0 = B δ ¯(x0 ) e Bδ = B 4² (x0 ),
2
dove il primo raggio è la metà di quello di B² e il secondo raggio è la
metà di quello di C0 . Siano, inoltre,
M0 = maxx∈C0 |f (x)|
35
e
²
|y − x0 | < δ = .
4
Le approssimazioni successive
u0 (t, y) = y
u1 (t, y) = y +
Rt
..
.
uk (t, y) = y +
Rt
0
0
f (u0 (s, y))ds
f (uk−1 (s, y))ds
..
.
vengono dette iterate di Picard. Vogliamo ora mostrare che esiste a > 0
tale che le funzioni uk esistono e sono continue su G = [−a, a] × Bδ (x0 )
per ogni k ∈ N e inoltre |uk (t, y) − x0 | < 2² . Questo è vero per u0 .
Supponiamolo vero per uk . Allora risulta che uk+1 è continua in G.
Inoltre:
|uk+1 (t, y) − x0 | = |uk+1 (t, y) − y + y − x0 | ≤
≤ |uk+1 (t, y) − y| + |y − x0 | =
¯Z t
¯
¯
¯
¯
= ¯ f (uk (s, y))¯¯ + |y − x0 | ≤
0
¯Z t
¯
¯
¯
¯
≤ ¯ |f (uk (s, y))| ds¯¯ + |y − x0 | ≤
0
≤ M0 a + |y − x0 | ≤
²
²
²
+ =
4 4
2
(1.11)
con a tale che a < 4M² 0 .
Ora dobbiamo provare che la successione un (t, y) converge uniformemente ad una funzione contiu nua u(t, y) per n → ∞ e per ogni
(t, y) ∈ G. Facciamo vedere che un è una successione di Cauchy.
Consideriamo:
¯
¯
|u2 (t, y) − u1 (t, y)| = ¯y +
Rt
0 f (u1 (s, y))ds − (y +
36
Rt
0 f (u0 (s, y))ds
´
¯R
=¯¯
¯R
K¯¯
¯
t
0
[f (u1 (s, y)) − f (u0 (s, y))] ds¯¯ ≤
t
0
|u1 (s, y) − y| ds¯¯ ≤
¯
n¯R
o
K ¯¯ 0t |u1 (s, y) − x0 | ds + |y − x0 | a ≤
´
³
Ka 2² + 4² < Ka²
Allora per induzione si prova che:
|un+1 (t, y) − un (t, y)| < (Ka)n ², ∀n ∈ N.
Infatti:
¯Z
¯
|uk+1 (t, y) − uk (t, y)| ≤ ¯¯
0
¯Z
¯
≤ K ¯¯
0
t
t
¯
¯
|f (uk (s, y)) − f (uk−1 (s, y))| ds¯¯ ≤
¯
¯
|uk (s, y) − uk−1 (s, y)| ds¯¯
Allora {un (t, y)} è una successione di Cauchy, (purchè a <
dato n̄ ∈ N , siano n > m > n̄. Si ha:
1
.
K
Infatti
|un (t, y) − um (t, y)| = |(un − un−1 ) + (un−1 − un−2 ) + ... + (um+1 − um )| ≤
≤
n−1
X
j=m
|uj+1 (t, y) − uj (t, y)| ≤
∞
X
(Ka)j ² = ²αn̄
j=n̄
+∞
X
l=0
αl = ²
αn̄
1−α
n
o
dove α = (Ka) < 1 e αn̄ → 0 per n̄ → ∞. Quindi, se a < min K1 , 4M² 0 ,
esiste u(t,y) continua in G tale che un (t, y) tende a n(t,y) uniformemente. Infine, considerando il limite per n → ∞ di
un (t, y) = y +
Z
t
f (un−1 (s, y))ds,
0
la convergenza uniforme implica che:
u(t, y) = y +
37
Z
0
t
f (u(s, y))ds,
e quindi abbiamo mostrato l’esistenza della soluzione che per la (1.11)
non esce da C0 . Ora ci resta da provare l’unicità. Supponiamo quindi
che w1 (t) e w2 (t) siano due soluzioni del problema di Cauchy
ẋ = f (x),
x(0) = x0 ,
sull’intervallo [−a, a]. Allora:
¯R
¯
|w1 (t) − w2 (t)| ≤ ¯ 0t |f (w1 (s)) − f (w2 (s))ds| Essendo w1 e w2 continue
e t ∈ [−a, a], esiste un compatto C tale che
C⊇ {y : ∃t ∈ [−a, a] tale che w1 (t) = y ∨ w2 (t) = y,
inoltre f ∈ C 1 (D) implica che f è lipschitziana su C, quindi esiste K̄
tale che
¯Z t
¯
¯
¯
|w1 (t) − w2 (t)| ≤ K̄ ¯¯ |w1 (s) − w2 (s)| ds¯¯ .
0
Applichiamo ora il lemma di Gronwall a |w1 (t) − w2 (t)| e concludiamo
che w1 (t) = w2 (t) per ogni t ∈ [−a, a].
Il teorema di esistenza e unicità ha una conseguenza molto importante:
traiettorie differenti non si intersecano mai. Se si intersecassero, infatti,
ci sarebbero due soluzioni che partirebbero dallo stesso punto (il punto
di intersezione) e questo farebbe venir meno l’unicità nel teorema.
Si può anche mostrare che sotto opportune condizioni per la funzione
f ( che sia ad esempio C 1 (D)) il sistema non lineare
ẋ = f (x),
x(0) = x0 ,
ha un’unica soluzione qualsiasi sia la condizione iniziale x0 ∈ E, definita su intervallo massimale di esistenza (α, β) ⊂ <. Per intervallo massimale intendiamo un intervallo che non può essere prolungato nè a
38
destra nè a sinistra. tale intervallo dipende da x0 e contiene l’origine in
quanto deve essere soddisfatta la condizione iniziale. Valgono i seguenti
teoremi
Teorema 8 Sia D un aperto non vuoto di <n , f : D → <n e f ∈
C 1 (D). Allora ∀x0 ∈ D esiste un intervallo massimale (α, β) con 0 ∈
(α, β), sul quale la soluzione del problema ai valori iniziali
ẋ = f (x),
x(0) = x0 ,
esiste ed è unica.
Teorema 9 Sia D un aperto non vuoto di <n contenente x0 e supponiamo f ∈ C 1 (D) e sia (α, β) l’intervallo massimale di esistenza della
soluzione x(t, x0 ) del problema ai valori iniziali
ẋ = f (x),
x(0) = x0 ,
.
Allora se β < ∞ per ogni compatto K ⊂ D esiste t ∈ (0, β) tale che
x(t, x0 ) ∈
/ K.
1.4.2
Dipendenza dalle condizioni iniziali e dai parametri
Vogliamo ora studiare la dipendenza della soluzione del problema ai
valori iniziali
ẋ = f (x)
x(0) = x0
dalla condizione iniziale x0 . Se l’equazione dipende anche da un parametro
µ ∈ <m cioè se si ha f (x, µ) allora la soluzione x(t, x0 , µ) dipenderà anche dal parametro µ. Parleremo quindi di dipendenza continua della
soluzione dalla condizione iniziale e dal parametro dato.
39
Teorema 10 Teorema di dipendenza dalle condizioni iniziali
Sia D un sottoinsieme aperto di <n contenente x0 e sia f ∈ C 1 (D).
Esisteranno allora a > 0 e δ > 0 tali che ∀x0 ∈ Bδ (x0 ) il problema ai
valori iniziali
ẋ = f (x)
x(0) = x0
ha una e una sola soluzione x(t, x0 ) con x ∈ C 1 (G), dove G = [−a, a] ×
Bδ (x0 ) ∈ <n+1 e inoltre per ogni x0 ∈ Bδ (x0 ) x(t, x0 ) è una funzione
due volte continuamente differenziabile per t ∈ [−a, a].
Teorema 11 Teorema di dipendenza dai parametri
Sia D un sottoinsieme aperto di <n+m contenente il punto (x0 , µ0 ) dove
x0 ∈ <n e µ0 ∈ <m e sia f ∈ C 1 (E). Esistono allora a > 0 e δ > 0 tali
che ∀y ∈ Bδ (x0 ) e ∀µ ∈ Bδ (µ0 ), il problema ai valori iniziali
ẋ = f (x, µ)
x(0) = y
ha un’unica soluzione x(t, y, µ) con x ∈ C 1 (G) dove G = [−a, a] ×
Bδ (x0 ) × Bδ (µ0 ).
1.4.3
Flusso di un sistema dinamico non lineare
Per i sistemi lineari abbiamo definito il flusso, eAt : <n → <n del
sistema lineare ẋ = Ax. La famiglia di mappe φt = eAt soddisfa le
seguenti proprietà per x ∈ <n :
– φ0 (x) = x
– φs (φt (x)) = φs+t (x) per ogni s, t ∈ <
– φ−t (φt (x)) = φt (φ−t (x)) = x per ogni t ∈ <.
Ora definiamo il flusso del sistema non lineare ẋ = f (x) che soddisfa le
stesse proprietà. Denotiamo l’intervallo massimale di esistenza (α, β)
della soluzione del problema ai valori iniziali
ẋ = f (x),
x(0) = x0 ,
40
con I(x0 ), poichè gli estremi α e β dell’intervallo generalmente dipendono da x0 .
Definizione 18 Sia D un sottoinsieme aperto di <n e sia f ∈ C 1 (D).
Per x0 ∈ D sia φ(t, x0 ) la soluzione del problema ai valori iniziali
ẋ = f (x)
x(0) = x0
definita sul suo intervallo massimale di esistenza I(x0 ). Allora per ogni
t ∈ I(x0 ) la famiglia di mappe ad un parametro φt : D → D definita
da:
φt (x0 ) = φ(t, x0 ) := x(t, x0 )
è detta flusso dell’equazione differenziale ẋ = f (x)
Fissato x0 ∈ D, sia I = I(x0 ), allora la mappa φ(·, x0 ) : I è rappresentabile mediante la traiettoria del sistema ẋ = f (x) per il punto
x0 . Viceversa, se si prende un K ⊆ D e t ∈ I(x0 ), ∀x0 ∈ K, allora
φt : K → E può essere vista come il moto dei punti di K.
Anche nel caso non lineare valgono, con opportune modifiche le proprietà del flusso lineare. Se definiamo l’insieme:
Ω = {(t, x0 ) : x0 ∈ D, t ∈ I(x0 )}
allora valgono i seguenti risultati:
Teorema 12 Sia D un aperto di <n e f ∈ C 1 (D). Allora Ω è un
sottoinsieme aperto di <n+1 e φ ∈ C 1 (Ω)
Teorema 13 Sia D un aperto di <n e f ∈ C 1 (D). Allora ∀x0 ∈ D, se
t ∈ I(x0 ) e s ∈ I(φt (x0 )), segue che
t + s ∈ I(x0 ) e φs+t = φs (φt (x0 ))
Teorema 14 Sotto le ipotesi del teorema precedente, se t ∈ I(x0 ) ∃ un
intorno U di x0 tale che {t} × U ⊂ Ω. Allora l’insieme V = φt (U ) è
aperto e
φ−t (φt (x)) = x per ogni x ∈ U
41
e
φt (φ−t (y)) = y per ogni y ∈ V.
E’ possibile mostrare che mediante un rescaling del tempo lungo le
traiettorie si può passare ad un sistema di equazioni differenziali le
cui soluzioni hanno tutte intervallo massimale di esistenza uguale a
(−∞, +∞), ∀x0 ∈ D. Dobbiamo distinguere due casi: D = <n e D ⊂
<n . Cominciamo dal primo:
ẋ = f (x), conf ∈ C 1 (<n ).
Riscaliamo il tempo lungo le traiettorie di questo sistema mediante la
formula:
Z t
τ (t, x0 ) = [1 + |f (x(s, x0 ))|]ds,
0
che definisce una t(x, τ ) strettamente crescente. Abbiamo allora:
dx
dx dt
1
=
= f (x)
.
dτ
dt dτ
1 + |f (x)|
Qundi il sistema di partenza si trasforma nel seguente sistema dinamico:
ẋ = g(x)
f (x)
∈ C 1 (<n ). La g(x) cosı̀ definita è limitata, infatti
con g(x) = 1+|f
(x)|
|g(x)| ≤ 1. Vale quindi il seguente
Teorema 15 ∀x0 ∈ D(= <n ), la soluzione del problema di Cauchy
ẋ = g(x)
x(0) = x
0
è definita su tutto <.
Dimostrazione
Supponiamo per assurdo che esista un x0 tale che l’intervallo di definizione
della soluzione (α, β) 6= <, cioè o α o β sono finiti. Sia β finito.
Consideriamo per t ≥ 0:
x(t, x0 ) = x0 +
42
Z
0
t
g(x(s, x0 ))ds.
Prendendo il modulo di entrambi i membri otteniamo:
|x(t, x0 )| ≤ |x0 | +
Z
0
t
|g(x(s, x0 ))| ds,
ma |g(x)| ≤ 1, quindi
|x(t, x0 )| ≤ |x0 | +
Z
0
t
1ds = |x0 | + t ≤ |x0 | + β
dove nell’ultima disuguaglianza abbiamo sfruttato il fatto che β è finito.
Dato che β < +∞, in [0, β) la soluzione è contenuta nel compatto
K = {x ∈ <n : |x| ≤ |x0 | + β} ,
che è un assurdo. Allora β = +∞. Analogamente si prova che α = −∞.
Nel caso in cui D è un sottoinsieme proprio di <n è necessario un
rescaling diverso da quello appena descritto.
Teorema 16 Siano f : D → <n , f ∈ C 1 (D), D 6= ®, D ⊂ <n ,
d(x,K)
f (x)
, γ(x) = 1+d(x,K)
K = <n − D (chiuso). Siano, inoltre, g(x) = 1+|f
(x)|
(0 < γ(x) ≤ 1, ∀x ∈ D), G(x) = γ(x)g(x). Allora le soluzioni di
ẋ = G(x)
x(0) = x
0
esistono ad ogni t ∀x0 ∈ D.
Si definisce il nuovo tempo
τ (t) =
Z
0
t
1
[1 + |f (x(s))|]ds,
γ(x(s))
di modo che il sistema ẋ = f (x) diventa per l’appunto
dx
dx dt
γ(x)
=
= f (x)
,
dτ
dt dτ
1 + |f (x)|
cioè
ẋ = G(x) con G(x) ∈ C 1 (D), |G(x)| ≤ 1.
Vediamo ora un teorema di esistenza globale:
43
Teorema 17 Sia f ∈ C 1 (<n ) e valga la seguente condizione di lipschitzianità
|f (x) − f (y)| ≤ M |x − y| per qualche M > 0 e ∀x, y ∈ <n .
Allora
I(x0 ) = (−∞, +∞), ∀x0 ∈ <n .
Dimostrazione
Per assurdo esista x0 ∈ <n tale che l’intervallo massimale destro [0, β)
della soluzione del corrispondente problema di Cauchy sia limitato (β <
∞). Abbiamo
x(t, x0 ) − x0 =
⇒ |x(t, x0 ) − x0 | ≤
≤M
Z
t
t
Z
0
Z
0
[f (x(s, x0 )) − f (x0 ) + f (x0 )]ds
t
|f (x(s, x0 )) − f (x0 )| ds + t |f (x0 )| ≤
|x(s, x0 ) − x0 | ds + β |f (x0 )|
0
e per il lemma di Gronwall
|x(t, x0 ) − x0 | ≤ β |f (x0 )| eM t ≤ |f (x0 )| eM β ,
che implica che la traiettoria destra è contenuta in un compatto di <n ,
che è un assurdo. Analogamente si prova che α = −∞.
Possiamo dunque concludere che ad ogni sistema di equazioni differenziali possiamo associare una mappa C 1
φ : < × D → D, con D aperto di <n ,
che soddisfi le proprietà:
1. φ0 (x) = x, ∀x ∈ D
2. φt ◦ φs (x) = φt+s (x), ∀s, t ∈ <, ∀x ∈ D,
dove φt = φ(t, x).
44
1.4.4
Linearizzazione
Per iniziare ad analizzare il sistema non lineare
ẋ = f (x),
è opportuno cercare di determinare i suoi punti di equilibrio e descrivere il comportamento del sistema in un intorno dei punti di equilibrio
trovati. Diamo innanzitutto la seguente
Definizione 19 Un punto di equilibrio è detto iperbolico se nessuno
degli autovalori della matrice Df (x0 ) ha parte reale nulla.
Il comportamento locale del sistema non lineare (1.4) vicino ad un
punto di equiibrio iperbolico x0 è qualitativamente determinato dal
comportamento del sistema lineare:
ẋ = Ax,
con A = Df (x0 ). Vediamo perchè procedendo in analogia al caso unidimensionale. Supponiamo che f(x) abbia uno sviluppo di Taylor del
primo ordine più termini di ordine superiore. Linearizzando trascuriamo i termini di ordine superiore. Dunque, nel caso dell’equazione
(1.4), in un intorno del punto critico x=a si può scrivere:
ẋ =
∂f
(a)(x − a) + termini di ordine superiore
∂x
Dovremmo quindi studiare l’equazione lineare con coefficienti costanti:
ẋ =
∂f
(a)(x − a)
∂y
Per semplificare la notazione trasliamo il punto a nell’origine dello
spazio delle fasi. Ponendo x̄ = x − a otteniamo:
x̄˙ =
45
∂f
(a)x̄
∂x
Per abbreviare possiamo porre ∂f
(a) = A, con A matrice n ×n. Quindi
∂x
il sistema linearizzato da studiare in un intorno di x=a sarà della forma
ẋ = Ax
Escludiamo il caso in cui A sia una matrice singolare, dunque avremo:
det A 6= 0
Dobbiamo a questo punto determinare gli autovalori di A. Utilizziamo
l’equazione caratteristica
det(A − λI) = 0
Otteniamo n autovalori λ1 , ..., λn .
Il sistema lineare scritto sopra è detto linearizzazione di ẋ = f (x) in a.
Definizione 20 Sia X uno spazio metrico. Siano A e B sottoinsiemi
di X. Un omeomorfismo di A su B è una mappa 1 a 1, h : A → B,
che sia continua e con inversa continua. Gli insiemi A e B si dicono
omeomorfi o topologicamente equivalenti.
Vogliamo enunciare ora il teorema della varietà stabile. Consideriamo
prima un’ulteriore definizione ed un esempio.
Definizione 21 Una varietà differenziabile M n-dimensionale è uno
S
spazio metrico connesso tale che M = α Uα e il ricoprimento di aperti
Uα gode delle seguenti proprietà:
– ∀α Uα è omeomorfo a B1 (0) di <n , cioè esiste un omeomorfismo
hα : Ua lpha → B1 (0)
– se Uα ∩ Uβ 6= ®, allora la mappa
h : hα ◦ h−1
β : hβ (Uα ∩ Uβ ) → hα (Uα ∩ Uβ ) è dif f erenziabile e
∀x ∈ hβ (Uα ∩ Uβ ) si ha che detDh(x) 6= 0.
46
Esempio 3
Sia dato il sistema non lineare
x˙1 = −x1
x˙ = −x + x2
2
2
1
x˙ = x + x2
3
3
1
con condizione iniziale c = (c1 c2 c3 )T . La soluzione del sistema dato è:
x1 (t) = c1 e−t
x = c et + c21 (e−t − e−2t )
2
2
x = c et +
3
3
c31 t
(e
3
− e−2t )
c2
Si ha che limt→∞ φ(c) = 0 se e solo se c3 = − 31 e anche che limt→−∞ φ(c) =
0 se e solo se c1 = c2 = 0. Definiamo ora
1
S = x ∈ < : x3 = − (x1 )2
3
½
3
¾
e
n
o
U = x ∈ <3 : x1 = x2 = 0 .
Consideriamo ora il sistema linearizzato ẋ = Ax con
−1
A = Df (0) =
0
0
0
0
.
−1 0
0 1
Gli autovalori sono:
λ1 = −1 a cui corrisponde il sottospazio stabile
λ2 = 1 a cui corrisponde il sottospazio instabile
x1
x2
0
0
0
,
.
x3
L’origine è un punto di equilibrio iperbolico perchè nessuno degli autovalori ha parte reale nulla. Osserviamo che il sottospazio generato da
λ1 e S hanno la stessa dimensione, cosı̀ come il sottospazio generato da
λ2 ed U. Enunciamo ora il seguente
47
Teorema 18 Teorema della varietà stabile
Sia D 6= ® un aperto di <n contenente l’origine, f ∈ C 1 (D) e sia φt
il flusso associato ad f. Supponiamo che f(0)=0 e che Df(0) abbia k
autovalori con parte reale negativa e i rimanenti n-k con parte reale
positiva. Allora esistono:
1 Una varietà differenziabile S k-dimensionale tale che φt (S) ⊂ S,
∀t ≥ 0 e limt→∞ φt (x0 ) = 0, ∀x0 ∈ S
2 Una varietà differenziabile U (n-k)-dimensionale tale che φt (U ) ⊆ U
∀t ≤ 0 e limt→−∞ φt (x0 ) = 0, ∀x0 ∈ U.
Definizione 22 Due sistemi di equazioni differenziali si dicono topologicamente equivalenti in prossimità dell’origine se esiste un omeomorfismo H che mappa un intorno U di 0 in un altro intorno V di
0 in modo da trasformare le traiettorie di U del primo sistema nelle
traiettorie di V del secondo sistema, preservando l’orientazione.
Un altro risultato importante è il seguente
Teorema 19 Teorema di Hartman-Grobman
Sia D un aperto non vuoto di <n contenente l’origine e f ∈ C 1 (D).
L’origine sia un punto di equilibrio iperbolico, φt sia il flusso del sistema
non lineare ẋ = f (x) e A=Df(0). Esiste allora un omeomorfismo H
di un aperto U contenente l’origine in un altro aperto V contenente
anch’esso l’origine ed un intervallo I0 ⊆ < (0 ∈ I0 ):
H ◦ φt (x0 ) = eAt ◦ H(x0 ), ∀x0 ∈ U, ∀t ∈ I0 .
L’effetto dei termini non lineari cambia la struttura qualitativa del ritratto di fase vicino all’origine nel caso in cui questa non sia un punto
di equilibrio iperbolico.
48
1.4.5
Sistemi dinamici non lineari in due dimen-
sioni
Analizziamo ora i sistemi non lineari in due dimensioni.
La forma generale di un campo vettoriale sul piano di fase è:
x˙1 = f1 (x1 , x2 )
x˙2 = f2 (x1 , x2 )
dove f1 ed f2 sono funzioni date. Questo sistema può essere scritto in
una forma più compatta come:
ẋ = f (x),
dove x rappresenta un punto del piano di fase e ẋ è il vettore velocità
in questo punto. Scorrendo lungo il campo vettoriale, un punto di fase
traccia una soluzione x(t), che corrisponde ad una traiettoria che si
muove lungo il piano di fase.
Come abbiamo detto, nei sistemi non lineari di solito le traiettorie non
si riescono a determinare analiticamente. Si cerca quindi di determinare
il comportamento qualitativo delle soluzioni, analizzando il ritratto di
fase del sistema. Esiste un’enorme varietà di possibili ritratti di fase.
Alcune caratteristiche comuni a tutti i ritratti di fase sono:
– Punti fissi che soddisfano la condizione f (x∗ ) = 0 e corrispondono
agli stati stazionari o agli equilibri del sistema
– Orbite chiuse, che corrispondono alle soluzioni periodiche, cioè le
soluzioni per le quali x(t+T)=x(t) per ogni t e per qualche T > 0.
– La disposizione delle traiettorie vicino ai punti fissi e alle orbite
chiuse.
– La stabilità o instabilità dei punti fissi e delle orbite chiuse.
1.5
Cicli limite
Un ciclo limite è una traiettoria chiusa isolata. L’essere chiusa implica
che il moto sia periodico. Per isolata si intende che tutte le traiettorie
49
vicine non sono chiuse e si muovono a spirale verso il ciclo limite o
allontanandosi da esso. A secondo del movimento delle traiettorie nell’intorno di un ciclo limite possiamo distinguere tre tipi di cicli limite:
Figura 1.19:
– cicli limite stabili: tutte le triettorie in un intorno del ciclo limite
convergono ad esso quando la variabile tempo tende all’infinito;
– cicli limite instabili: tutte le traiettorie in un intorno del ciclo
limite divergono da esso quando la variabile tempo tende all’infinito;
– cicli limite semistabili: alcune traiettorie nell’intorno del ciclo
limite convergono ad esso, mentre altre divergono da esso quando
la variabile tempo tende all’infinito.
I cicli limite sono molto importanti nel campo scientifico. Ci sono innumerevoli esempi di sistemi caratterizzati da cicli limite. Ne citiamo
alcuni: il battito del cuore, l’accensione periodica di un neurone pacemaker, i ritmi quotidiani della temperatura del corpo umano e della
secrezione di ormoni, ecc.
I cicli limite riguardano i fenomeni non lineari. Non possono accadere
nei sistemi lineari. Un sistema lineare può avere orbite chiuse, ma non
possono essere isolate: se x(t) è una soluzione periodica del sistema,
allora lo è anche cx(t) per ogni costante c 6= 0, quindi x(t) è circondata
da una famiglia ad un parametro di orbite chiuse.
Consideriamo ora un semplice esempio (useremo le coordinate polari).
50
Figura 1.20:
Esempio1
Consideriamo il sistema:
ṙ = r(1 − r2 )
θ̇ = 1
dove r ≥ 0. Le dinamiche radiali e angolari non sono legate e possono
essere quindi analizzate separatamente. Trattiamo ṙ = r(1 − r2 ) come
un campo vettoriale sulla retta. Vediamo che r∗ = 0 è un punto fisso
instabile e r∗ = 1 è stabile (figura(1.20)). Tutte le traiettorie, tranne
r∗ = 0 si avvicinano al cerchio unitario r∗ = 1 monotonicamente. Dato
che il moto nella direzione angolare è una rotazione semplice a velocità
angolare costante, vediamo che tutte le traiettorie si muovono asintoticamente a spirale verso un ciclo limite in r∗ = 1 (figura(1.21)).
Consideriamo ora un altro esempio
Esempio2
Oscillatore di Van der Pol
La seguente equazione (di van der Pol) ha avuto un ruolo centrale nello
studio delle dinamiche non lineari:
ẍ + µ(x2 − 1)ẋ + x = 0
51
Figura 1.21:
dove µ ≥ 0 è un parametro. Questa equazione è un semplice oscillatore
armonico ma con un termine di smorzamento non lineare µ(x2 − 1)ẋ.
Questo termine agisce come uno smorzamento ordinario positivo per
|x| > 1, e come uno smorzamento negativo per |x| < 1. In altre parole fa decadere oscillazioni di grande ampiezza e le fa aumentare se
diventano troppo piccole. Si può provare che l’equazione di van der Pol
ha un unico ciclo limite stabile per ogni µ > 0, come mostreremo più
avanti.
1.5.1
Il teorema di Poincarè-Bendixon
Cerchiamo ora un metodo per stabilire se le orbite chiuse esistono in
particolari sistemi. Il teorema di Poincarè - Bendixon è uno dei pochi
risultati in questa direzione. Inoltre è uno dei risultati chiave della
dinamica non lineare in quanto implica che il caos non può accadere
nel piano di fase.
52
Figura 1.22:
Teorema 20 Supponiamo che:
1 R sia un sottoinsieme chiuso e limitato del piano
2 ẋ = f (x) sia un campo vettoriale continuamente differenziabile su un
insieme aperto contenente R
3 R non contenga punti fissi
4 Esista una traiettoria C costretta a rimanere in R, nel senso che
parte da R e resta in R in qualsiasi tempo futuro
Allora o C è un’orbita chiusa o si muove a spirale verso un’orbita chiusa
per t → ∞. In entrambi i casi R contiene un’orbita chiusa (figura 1.22).
Nell’applicare il teorema di Poincarè - Bendixon è facile verificare le
condizioni 1 - 3. La condizione 4 è la più difficile. Cosa ci garantisce
l’esistenza di una traiettoria C confinata? Il metodo standard è quello
di costruire una regione trappola R, cioè un insieme chiuso connesso
tale che i vettori del campo vettoriale sul contorno di R siano ovunque
diretti verso l’interno (figura 1.23). Allora tutte le traiettorie di R sono
confinate. Se possiamo anche stabilire che non ci sono punti fissi in
R, allora il teorema di Poincarè - Bendixon assicura che R contiene
un’orbita chiusa. Il teorema di Poincarè - Bendixon può essere difficile
da applicare in pratica. Un caso favorevole si ha quando il sistema ha
una semplice rappresentazione in coordinate polari, come nel seguente
esempio:
53
Figura 1.23:
Esempio3
Consideriamo il sistema:
ṙ = r(1 − r2 ) + µrcosθ
θ̇ = 1
Quando µ = 0 c’è un ciclo limite stabile in r = 1. Vediamo che esiste
ancora un’orbita chiusa per µ > 0, finchè µ è sufficientemente piccolo.
vediamo se è possibile trovare due cerchi concentrici con raggi rmin e
rmax tali che ṙ < 0 sul cerchio esterno e ṙ > 0 sul cerchio interno. Allora
la regione 0 < rmin ≤ r ≤ rmax sarà la nostra regione trappola Notiamo
che non ci sono punti fissi in questa regione poichè θ̇ > 0; dunque, se
rmin ed rmax possono essere trovati, il teorema di Poincarè-Bendixon
implica l’esistenza di un’orbita chiusa. Per trovare rmin richiediamo
ṙ = r(1−r2 )+µrcosθ > 0 per ogni θ. Dato che cosθ ≥ 1, una condizione
√
sufficiente per rmin è 1−r2 −µ > 0. Quindi ogni rmin < 1 − µ va bene,
finchè µ < 1 in modo che la radice quadrata abbia senso. Dovremmo
scegliere rmin più grande possibile, per circondare il ciclo limite più
√
’saldamente’ possibile. Potremmo prendere rmin = 0.999 1 − µ. Con
un ragionamento simile, il flusso è dentro il cerchio esterno se rmax =
√
1.001 1 + µ. Allora un’orbita chiusa esiste per ogni µ < 1 e giace da
√
√
qualche parte nella regione 0.999 1 − µ < r < 1.001 1 + µ.
54
1.5.2
Il teorema di Lienard
Molti circuiti oscillanti possono essere modellati da un’ equazione differenziale del secondo ordine della forma:
ẍ + f (x)ẋ + g(x) = 0
conosciuta come equazione di Lienard. Questa equazione è una generalizzazione dell’oscillatore di van der Pol ẍ + µ(x2 − 1)ẋ + x = 0. Può
essere anche interpretata come il moto di una massa soggetta ad una
forza di smorzamento non lineare −f (x)ẋ ed ad una forza non lineare
di ripristino -g(x). L’equazione di Lienard è equivalente al sistema:
ẋ = y
ẏ = −g(x) − f (x)y
.
Il teorema che segue assicura che questo sistema ha un unico ciclo limite
stabile sotto opportune ipotesi su f e su g.
Teorema 21 Supponiamo che f(x) e g(x) soddisfino alle seguenti condizioni:
1 f(x) e g(x) siano continuamente differenziabili per ogni x
2 g(-x)=-g(x) per ogni x (cioè g(x) sia una funzione dispari)
3 g(x) > 0 per x > 0
4 f(-x)=f(x) per ogni x (cioè f(x) sia una funzione pari)
R
5 La funzione dispari F (x) = 0x f (u)du ha esattamente uno zero per
x=a, è negativa per 0 < x < a, è positiva e non decrescente per x > a,
e F (x) → ∞ per x → ∞
Allora il sistema ha un unico ciclo limite stabile intorno all’origine nel
piano di fase.
Le ipotesi su g(x) indicano che la forza di richiamo agisce come quella
di una molla e tende a ridurre ogni spostamento, mentre le ipotesi su
f(x) implicano che lo smorzamento è negativo per valori piccoli di |x| ed
è positivo per valori più alti di |x|. Dato che le piccole oscillazioni sono
pompate e le grandi oscillazioni sono smorzate, non è sorprendente che
55
il sistema tenda a stabilizzarsi in un’oscillazione di un’ampiezza intermedia.
Vediamo ora un esempio
Esempio4
Mostriamo che l’equazione di van der Pol ha un’unico ciclo limite stabile.
Per l’equazione di van der Pol
ẍ + µ(x2 − 1)ẋ + x = 0 (µ > 0)
si ha f (x) = µ(x2 − 1) e g(x) = x, quindi le condizioni 1 - 4 del teorema
di Lienard sono chiaramente soddisfatte. Osserviamo che considerando
2
2)
si vede che
l’energia E(x, ẋ) = (ẋ +x
2
Ė(x, ẋ) = ẋẍ + xẋ = ẋ[µ(1 − x2 )ẋ − x] + xẋ = µ(1 − x2 )ẋ2 .
Questo implica che l’oscillatore dissipa energia per |x| > 1, mentre la
R
produce per |x| < 1. Dato che F (x) = µ 0x (u2 − 1)du = µ( 31 x2 − 1)x,
la condizione 5 è anch’essa soddisfatta.
Diamo anche un’altra dimostrazione dell’esistenza di un ciclo limite.
3
3
Ponendo z = ẋ + µ( x3 − x) otteniamo: ẋ = z − µ( x3 − x) e da ż =
ẍ + µ(x2 − 1)ẋ otteniamo ż = −x. Dunque il sistema
3
ẋ = z − µ( x3 − x)
ż = −x
è equivalente a quello di partenza. La corrispondenza (x, ẋ) ↔ (x, z)
tra punti dei due piani è biunivoca e regolare ed il ritratto di fase è
quindi qualitativamente simile nei due casi. In particolare punti di
equilibrio e orbite chiuse si corispondono nei due piani. L’unico punto
di equilibrio è (0,0); linearizzando si trova
ẋ = µx + z
ż = −x
µ
1
. L’origine è un fuoco instabile.
−1 0
Vogliamo mostrare che esiste un unico ciclo limite stabile, nel senso
a cui è associata la matrice
56
che ogni traiettoria diversa da (0,0) tende, per t → ∞, ad avvolgersi
su di esso. Osserviamo ora che l’equazione differenziale della famiglia
di traiettorie è
x
dz
=−
dx
z − F (x)
dove
x3
− x)
3
in quanto se x=x(t) è invertibile esiste t=t(x) e considerando z(x(t)) si
ha
dz
x
dz dx
dz
dz
dt
=−
=
⇒
= dx
dt
dx dt
dx
z − F (x)
dt
F (x) := µ(
La sostituzione z → −z e x → −x lascia invariata l’equazione e quindi
si deduce che se si riflette un’orbita rispetto all’origine si ottiene ancora
un’orbita. Consideriamo l’orbita che parte da un punto P = (0, ξ).
L’andamento dell’orbita è quello indicato in figura 1.24: dopo un tempo
finito interseca la cubica z=F(x) in un punto T, x diventa decrescente
e dopo un tempo finito interseca l’asse z in un punto S di coordinate
(0, −η(ξ)), η(ξ) > 0. Osserviamo ora che se esiste ξ > 0 tale che η(ξ) =
ξ allora riflettendo simmetricamente all’origine si ottiene un’altra orbita
che si salda con la precedente dando luogo ad un’orbita chiusa. Poichè
tutte le orbite si avvolgono intorno all’origine possiamo concludere che i
punti fissi dell’applicazione ξ → η(ξ) sono in corrispondenza biunivoca
con le orbite chiuse. Dobbiamo dunque mostrare che di questi punti fissi
ne esiste esattamente uno. Consideriamo la funzione V (x, z) = x2 + z 2
e chiamiamo γξ il tratto di orbita da (0, ξ) a (0, −η(ξ)) e τ il relativo
tempo di percorrenza. Si ha:
2
2
δ(ξ) := η(ξ) − ξ =
Z
0
τ
Z τ
Z τ
dV
dt = 2 (xẋ + z ż)dt = −2
xF (x)dt =
dt
0
0
(essendoż = −x) = 2
Facciamo vedere che:
1) δ(xi) > 0 per ξ vicino a 0;
2) δ(ξ) è strettamente decrescente;
3) δ(ξ) → −∞ per ξ → ∞.
57
Z
γξ
F (x)dz.
Figura 1.24:
¯ =
Da queste proprietà segue l’esistenza di un unico punto ξ¯ tale che δ(ξ)
¯
0, che equivale a ξ¯ = η(ξ).
1) Se ξ è abbastanza vicino a 0, il punto T si trova nel tratto in cui F
è negativa. Essendo anche ż < 0 si ha F (x)dz > 0 e quindi δ(ξ) > 0.
2) Si può scrivere
xF (x)
dx.
F (x)dz = −
z − F (x)
Inoltre
Z
γξ
F (x)dz =
_
Z
_
PQ
... +
Z
_
QR
.. +
Z
_
RS
.
_
Se ξ decresce, P Q si alza, RS si abbassa. Ciò significa che z − F (x)
aumenta in modulo su questi tratti, mentre xF(x) rimane inalterato e
R
R
negativo. Essendo F (x)dz > 0, _ ... + _ ... diminuisce. Sul tratto
PQ
_
RS
QR F è positiva e strettamente crescente e dz < 0. Ne segue che se
R
aumenta ξ allora _ F (x)dz diminuisce.
QR
_
3) Consideriamo il tratto di orbita QR. Facendo riferimento alla figura
1.25 deduciamo che
Z
_
QR
F (x)dz ≤
Z
_
LN
F (x)dz ≤ F (a)
R
Z
_
LN
dz.
Poichè _ dz=(differenza tra l’ordinata di N e l’ordinata di L) → −∞
LN
per ξ → +∞ segue la tesi.
58
Figura 1.25:
59
Capitolo 2
Biforcazioni e caos
Uno degli aspetti interessanti riguardo ai sistemi ad una o più dimensioni è la dipendenza dai parametri. La struttura qualitativa del flusso
può variare se si variano i parametri. In particolare i punti fissi possono
essere creati o distrutti oppure può cambiare la loro stabilità. Questi
cambiamenti qualitativi nelle dinamiche sono detti biforcazioni e i valori dei parametri per i quali avvengono sono detti punti di biforcazione.
2.1
Biforcazioni in una dimensione
Cominciamo analizzando le biforcazioni di punti fissi sulla retta.
– Biforcazione a nodo sella
La biforcazione a nodo sella è il meccanismo di base attraverso il
quale punti fissi sono creati e distrutti. Al variare di un parametro
due punti fissi si muovono l’uno verso l’altro e si annullano a vicenda. L’esempio tipico di una biforcazione a nodo sella è dato
dal seguente sistema del primo ordine:
ẋ = r + x2
60
Figura 2.1:
dove r è un parametro che può essere positivo o negativo o nullo.
Quando r è negativo abbiamo due punti fissi, uno stabile e uno
instabile. Man mano che r arriva a zero da sinistra, la parabola
y = r + x2 si sposta verso l’alto ed i due punti fissi si muovono
l’uno verso l’altro. Quando r=0, i punti fissi si riuniscono in un
punto fisso semistabile x∗ = 0. Questo tipo di punto fisso è estremamente delicato, scompare non appena r > 0 e poi non ci
sono più punti fissi. In questo esempio possiamo dire che c’è una
biforcazione per r=0, poichè i campi vettoriali per r < 0 e r > 0
sono qualitativamente differenti.
Un altro esempio è dato dal campo vettoriale:
ẋ = r − x2 .
√
I punti fissi sono dati da r − x2 = 0, dunque x∗ = ± r. Ci sono
due punti fissi per r > 0 e nessuno per r < 0. Per determinare
√
la stabilità lineare, calcoliamo f 0 (x∗ ) = −2x∗ . Quindi x∗ = + r
è stabile poichè f 0 (x∗) < 0. Utilizzando lo stesso ragionamento
√
possiamo concludere che x∗ = − r è instabile. Nel punto di
biforcazione r=0 troviamo f 0 (x∗ ) = 0; la linearizzazione sparisce
quando i punti fissi si uniscono. Il diagramma di biforcazione è
mostrato in figura 2.2.
61
Figura 2.2:
Mostriamo che anche il sistema non lineare del primo ordine ẋ = r
− x − e−x passa attraverso una biforcazione a nodo sella variando
r, e calcoliamo il valore di r nel punto di biforcazione.
I punti fissi soddisfano f (x) = r − x − ex = 0. A differenza
dell’esempio precedente, però, in questo caso, non riusciamo a
trovare esplicitamente i punti fissi come funzione di r. Utilizziamo
dunque un approccio geometrico. Disegnamo nella stessa figura i
grafici di r −x ed e−x (Figura 2.3). Quando la retta r −x interseca
la curva e−x , abbiamo r − x = e−x e quindi f (x) = 0. Dunque le
intersezioni tra la retta e la curva corrispondono ai punti fissi del
sistema. Questa figura ci permette anche di studiare la direzione
del flusso sull’asse x: il flusso è verso destra quando la retta si
trova sopra la curva poichè r − x > e−x e quindi ẋ > 0. Dunque, il
punto fisso sulla destra è stabile e quello sulla sinistra è instabile.
Ora cominciamo a far decrescere il parametro r. La retta r − x
scivola verso sotto ed i punti fissi si avvicinano l’un l’altro. Per
un particolare valore r = rc la retta diventa tangente alla curva
ed i punti fissi si uniscono in una biforcazione a nodo sella. Per
valori di r minori di rc , la retta si trova sotto la curva e non ci sono
punti fissi. Per trovare il punto di biforcazione rc imponiamo la
condizione che i grafici di r − x ed e−x siano tangenti. Chiediamo
62
Figura 2.3:
dunque l’uguaglianza delle funzioni e delle loro derivate:
e−x = r − x
e
d
d −x
e =
(r − x)
dx
dx
Dalla seconda equazione abbiamo −e−x = −1 e quindi x=0. Allora nella prima equazione abbiamo r=1.
Dobbiamo quindi concludere che c’è una biforcazione in x=0 ed il
valore di biforcazione è rc = 1.
– Biforcazione transcritica
Ci sono alcune situazioni in cui un punto fisso esiste per tutti i
valori di un parametro e non può essere distrutto. Per esempio
nell’equazione logistica ed in altri semplici modelli per la crescita
di una singola specie, c’è un punto fisso della popolazione a zero,
indipendentemente dal valore del tasso di crescita. Comunque, un
tale punto fisso può cambiare la sua stabilità variando il parametro
che compare nell’equazione. La biforcazione transcritica è il meccanismo standard per questi cambi di stabilità. La forma normale
per una biforcazione transcritica è:
ẋ = rx − x2 .
63
Figura 2.4:
Questa equazione somiglia all’equazione logistica, ma adesso ammettiamo che x ed r assumano valori sia positivi che negativi. La
figura 2.4 mostra il campo vettoriale al variare di r. Notiamo che
c’è un punto fisso in x∗ = 0 per tutti i valori di r. Per r < 0 c’è un
punto fisso instabile in x∗ = r ed un punto fisso stabile in x∗ = 0.
All’aumentare di r il punto fisso instabile raggiunge l’origine e vi
si unisce quando r=0. Infine quando r > 0, l’origine è diventata instabile. Notiamo l’importante differenza tra la biforcazione
a nodo sella e la biforcazione transcritica: nel caso transcritico i
due punti fissi non spariscono dopo la biforcazione ma cambiano
solo la loro stabilità. Il diagramma di biforcazione è mostrato in
figura 2.5.
– Biforcazione a forcone
Analizziamo ora un terzo tipo di biforcazione, detta biforcazione
a forcone. Questa biforcazione è comune nei problemi fisici che
hanno una simmetria. Per esempio, molti problemi hanno una
simmetria spaziale tra destra e sinistra.
Ci sono due tipi di biforcazione a forcone: la biforcazione a forcone
supercritica e la biforcazione a forcone subcritica.
64
Figura 2.5:
Biforcazione a forcone supercritica
La forma normale di questo tipo di biforcazione è:
ẋ = rx − x3 .
Notiamo che questa equazione non varia se sostituiamo x con
-x. Questo fatto esprime matematicamente la simmetria di cui
abbiamo parlato prima. La figura 2.6 mostra il campo vettoriale
per diversi valori di r.
Quando r < 0 l’origine è l’unico punto fisso, ed è stabile. Quando
r=0, l’origine è ancora stabile, ma più debolmente, poichè i termini
lineari scompaiono. Infine quando r > 0 l’origine diventa instabile.
Compaiono due nuovi punti fissi simmetrici rispetto all’origine e
√
collocati a x∗ = ± r. La ragione dell’utilizzo del termine forcone
risulta chiara se plottiamo il diagramma di biforcazione (Figura
2.7).
Biforcazione a forcone subcritica
Nel caso precedente il termine cubico è stabilizzante: agisce come
una forza di richiamo che riporta indietro x(t) verso x=0. Se
invece il termine cubico fosse destabilizzante, cioè:
ẋ = rx + x3 ,
allora avremmo una biforcazione a forcone subcritica. La figura
65
Figura 2.6:
Figura 2.7:
66
Figura 2.8:
2.8 mostra il diagramma di bifocazione. Ci accorgiamo innanzitutto che è invertita rispetto alla figura 2.7. I punti fissi diversi da
√
zero, cioè x∗ = ± −r, sono instabili, ed esistono solo al di sotto
della biforcazione (r < 0), da qui il termine subcritica. L’origine è
stabile per r < 0, e instabile per r > 0, come nel caso precedente,
ma ora l’instabilità non è contrastata dal termine cubico; infatti
il termine cubico contribuisce a portare le traiettorie all’infinito.
Si può mostrare che
x(t) → ±∞
in un tempo finito, partendo da una qualsiasi condizione iniziale
x0 6= 0.
Nei sistemi fisici reali, questo tipo di instabilità è solitamente contrastata dall’influenza stabilizzante di termini di ordine superiore.
Assumendo che il sistema sia simmetrico, il primo termine stabilizzante deve essere x5 . Dunque l’esempio canonico di un sistema
con una biforcazione a forcone subcritica è:
ẋ = rx + x3 − x5 .
67
2.2
Biforcazioni in più dimensioni
Passando dai sistemi unidimensionali ai sistemi bidimensionali, i punti
fissi possono essere sempre creati, distrutti o destabilizzati, ma ora
questo vale anche per le orbite chiuse. Le biforcazioni discusse nel
paragrafo precedente hanno le loro analoghe in due dimensioni (ed in
generale in tutte le dimensioni). Consideriamo ora alcuni esempi.
– Biforcazione a nodo sella
La biforcazione a nodo sella è come abbiamo visto il meccanismo
base per la creazione e la distruzione di punti fissi. L’esempio
tipico in due dimensioni è:
ẋ = µ − x2
ẏ = −y
C’è una biforcazione a nodo sella nel punto critico non iperbolico
Figura 2.9:
(0,0) al variare del parametro µ. Per µ < 0 non ci sono punti
critici. Per µ = 0 c’è un punto critico nell’origine ed è un nodo√
√
sella. Per µ > 0 ci sono due punti critici in (± µ, 0). ( µ, 0) è
√
un nodo stabile e (− µ, 0) è una sella. Il ritratto di fase di questo
sistema è mostrato in figura 2.9. Il diagramma di biforcazione è
lo stesso di quello mostrato in figura (2.2).
– Biforcazione transcritica
Consideriamo il sistema:
ẋ = µx − x2
ẏ = −y
68
C’è una biforcazione transcritica nell’origine al variare di µ. I
Figura 2.10:
punti critici sono nell’origine e in (µ, 0). Il ritratto di fase di questo
sistema per µ = 0.5 è mostrato in figura 2.10. Il diagramma di
biforcazione è lo stesso di quello del caso unidimensionale.
– Biforcazione a forcone
Biforcazione a forcone supercritica
Consideriamo il sistema:
ẋ = µx − x3
ẏ = −y
Cerchiamo i punti di equilibrio:
x(µ − x2 ) = 0
µx − x3 = 0
ẋ = 0
⇒
⇒
ẏ = 0
y=0
y=0
Per µ ≤ 0 l’unico punto critico è nell’origine e per µ > 0 i punti
√
critici sono nell’origine e in (± µ, 0). Per µ < 0 l’origine è un
√
nodo stabile. Per µ > 0 l’origine è un punto sella e sia ( µ, 0) che
√
(− µ, 0) sono nodi stabili. La biforcazione si ha in µ = 0, dove
un equilibrio si biforca in 3 all’aumentare di µ. Il ritratto di fase
di questo sistema per µ = 0.5 è mostrato in figura 2.11 .
Biforcazione a forcone subcritica
ẋ = µx + x3
.
ẏ = −y
69
Figura 2.11:
Questo sistema ha un equilibrio per µ ≥ 0 e 3 equilibri per µ < 0.
La biforcazione è in µ = 0, in cui 3 equilibri si riuniscono in 1
all’aumentare di µ.
2.3
Biforcazione di Hopf
Supponiamo che un sistema bidimensionale abbia un punto fisso
stabile. Quali sono i possibili modi in cui questo punto può perdere
stabilità al variare di µ? La risposta va cercata negli autovalori
della matrice Jacobiana. Se il punto fisso è stabile, gli autovalori
λ1 e λ2 devono trovarsi entrambi nel semipiano di sinistra del
piano complesso, cioè con parte reale minore di zero. Ci sono due
possibilità: o gli autovalori sono entrambi reali e negativi, oppure
sono complessi coniugati. Per destabilizzare il punto fisso, uno
o entrambi gli autovalori devono andare nel semipiano di destra
al variare di µ. Consideriamo ora il caso in cui due autovalori
complessi coniugati attraversano l’asse immaginario per andare
nel semipiano di destra.
Teorema 22 Teorema di biforcazione di Hopf
Sia x=0 una soluzione di equilibrio ed il sistema linearizzato attorno a questo punto abbia una coppia di autovalori complessi coniugati semplici λ(µ) = Reλ ± Imλ. Si supponga che la parte
70
reale di questa coppia sia la più grande tra le parti reali di tutti gli
autovalori e che in un piccolo intorno del punto di biforcazione µc
si abbia:
∗ Reλ < 0 se µ < µc
∗ Reλ = 0 e Imλ 6= 0 se µ = µc
∗ Reλ > 0 se µ > µc
Allora in un piccolo intorno destro di µc lo stato stazionario è
instabile ed esiste almeno una soluzione di ciclo limite periodica
attorno ad x=0.
Consideriamo ora alcuni esempi:
Esempio1
Consideriamo il sistema bidimensionale:
x˙ = x (µ − x2 − x2 ) − x
1
1
2
1
2
x˙ = x (µ − x2 − x2 ) + x
2
2
1
1
2
L’origine è il solo punto di equilibrio. Infatti:
x˙ = 0
x (µ − x2 − x2 ) − x = 0
x1 (µ − x21 − x22 ) = x2
1
1
2
1
2
⇒
⇒
x˙ = 0
x (µ − x2 − x2 ) + x = 0
x (µ − x2 − x2 ) + x = 0
2
1
2
2
1
1
2
1
2
⇒
x1 (µ − x21 − x22 ) = x2
x1 (µ − x21 − x22 )(µ − x21 − x22 ) + x1 = 0
⇒
x1 [(µ − x21 − x22 )2 + 1] = 0
x =0
2
.
⇒
x1 = 0
x (µ − x2 − x2 ) = x
1
2
1
2
⇒
x1 = 0
Consideriamo ora il sistema linearizzato ẋ = Ax con
A=
µ −1
1
µ
.
Dunque A − λI è dato da:
µ−λ
1
71
−1
µ−λ
x1 (µ − x21 − x22 ) = x2
Abbiamo dunque
(µ − λ)2 + 1 = 0 ⇒ λ2 − 2λµ + µ2 + 1 = 0
che ha come soluzioni
µ±
q
µ2 − µ2 − 1 = µ ± i.
Per µ < 0 abbiamo una coppia di autovalori complessi nel semipiano con parte reale negativa: un fuoco asintoticamente stabile.
Per µ > 0 abbiamo una coppia di autovalori complessi con parte
reale positiva: un fuoco instabile.
Consideriamo ora
(x21 +x22 ). = 2(x1 x˙1 +x2 x˙2 ) = 2x21 (µ−x21 −x22 )−2x1 x2 +2x22 (µ−x21 −x22 )+2x1 x2
= 2(µ − x21 − x22 )(x21 + x22 ).
Passando a coordinate polari si ha:
(ρ2 ). = 2(µ − ρ2 )ρ2 ⇒ 2ρρ̇ = 2(µ − ρ2 )ρ2 ⇒ ρ̇ = ρ(µ − ρ2 ).
C’è un ciclo limite stabile per µ > 0, cioè una circonferenza di
√
raggio µ. Per µ < 0, ρ̇ è negativo tranne che per ρ = 0, dunque
l’origine è un equilibrio globalmente stabile. La biforcazione in
µ = 0 è detta biforcazione di Hopf supercritica. Il diagramma di
biforcazione è mostrato in figura 2.12.
Figura 2.12:
72
Esempio2
Un altro tipo di biforcazione di Hopf avviene, ad esempio, per il
sistema:
x˙1 = x1 (µ + x21 + x22 )(1 − x21 − x22 ) − x2
x˙1 = x2 (µ + x21 + x22 )(1 − x21 − x22 ) + x1
Anche in questo caso l’origine è l’unico punto di equilibrio. E’ un
fuoco stabile per µ < 0 ed un fuoco instabile per µ > 0.
Consideriamo
(x21 + x22 ). = 2(x1 x˙1 + x2 x˙2 )
= 2x21 (x21 +x22 +µ)(1−x21 −x22 )−2x1 x2 +2x1 x2 +2x22 (x21 +x22 +µ)(1−x21 −x22 ) =
= 2(x21 + x22 )(x21 + x22 + µ)(1 − x21 − x22 ).
Passando a coordinate polari
(ρ2 ). = 2ρρ̇ = 2ρ2 (ρ2 + µ)(1 − ρ2 ) ⇒ ρ̇ = ρ(ρ2 + µ)(1 − ρ2 ).
C’è un ciclo limite per ρ = 1 e , per µ < 0, c’è un altro ciclo limite
√
√
per ρ = −µ. Per µ < −1 il ciclo limite in µ è stabile ed il
√
ciclo limite in 1 è instabile. Per −1 < µ < 0 il ciclo limite in µ
è instabile ed il ciclo limite in 1 è stabile. Per µ > 0 abbiamo
solo un ciclo limite stabile in 1. La biforcazione in µ = 0 è detta
biforcazione di Hopf subcritica. Il diagramma di biforcazione è
mostrato in figura 2.13.
Figura 2.13:
73
2.4
Caos
Finora ci siamo occupati dello studio di sistemi dinamici in una o
due dimensioni. Al crescere del numero delle dimensioni si presentano fenomeni sempre più complessi. A partire dalla dimensione
tre si ha il caos. Studiamo questo fenomeno tramite un esempio
fornito da Lorenz.
2.4.1
Equazioni di Lorenz
Consideriamo le equazioni di Lorenz:
ẋ = σ(y − x)
ẏ = rx − y − xz
(2.1)
ż = xy − bz
dove σ, r, b sono parametri positivi. σ è il numero di Prandtl ed
r è il numero di Rayleigh. Lorenz scoprı̀ che questo sistema può
avere dinamiche estremamente irregolari: per un’ampia gamma di
parametri la soluzione oscilla irregolarmente, ma sempre rimanendo in una regione limitata del piano delle fasi. Quando disegnò
le traiettorie in 3 dimensioni, scoprı̀ che si sistemavano in un insieme complicato, detto ’attrattore strano’. A differenza dei punti
fissi e dei cicli limite stabili, l’attrattore strano non è un punto,
una curva o addirittura una superficie ma è un frattale, con una
dimensione frazionaria compresa fra 2 e 3.
2.4.2
Semplici proprietà delle equazioni di Lorenz
Lorenz ha eliminato tutte le possibilità conosciute per il comportamento a lungo termine di questo sistema: mostrò che in un certo
range di parametri non possono esserci punti fissi stabili e cicli limite stabili. Provò anche che tutte le traiettorie restano confinate
in una regione limitata e sono alla fine attratte da un insieme di
volume zero. Ci si chiede quindi come possa essere questo insieme
74
e come le traiettorie si muovano su di esso. Vedremo che questo
insieme è l’attrattore strano di cui parlavamo prima e il moto su
di esso è caotico.
Vediamo prima di tutto come Lorenz esculse le possibilità tradizionali.
∗ Non linearità.
Nel sistema (1.12) gli unici termini non lineari sono i termini
quadratici xy e xz.
∗ Simmetria.
Nel sistema di Lorenz c’è una importante simmetria: sostituendo (x,y) con (-x,-y) in (2.1) le equazioni restano le stesse.
Quindi se (x(t),y(t),z(t)) è una soluzione allora lo è anche (x(t),-y(t),+z(t)). Questo significa che o una soluzione è essa stessa simmetrica, o c’è un’altra soluzione simmetrica alla
prima.
∗ Contrazione del volume.
Il sistema di Lorenz è dissipativo: i volumi nello spazio delle
Figura 2.14:
fasi si contraggono sotto l’azione del flusso. Per verificare
questa situazione dobbiamo prima rispondere alla seguente
domanda: come si evolvono i volumi? Rispondiamo a questa
domanda in generale, considerando un sistema in 3 dimensioni
75
ẋ = f (x). Prendiamo una superficie chiusa arbitraria S(t)
di volume V(t) nel piano delle fasi. Pensiamo ai punti di S
come condizioni iniziali per le traiettorie e immaginiamo che
si evolvano di un tempo infinitesimo dt. S si evolverà in una
nuova superficie S(t+dt). Quanto vale il suo volume V(t+dt)?
Consideriamo la figura (2.14). Sia n la normale uscente da S.
Dato che f è la velocità istantanea dei punti, allora f · n è
la componente della velocità della normale. Al tempo dt un
elemento di area dA spazzerà dunque un volume f · ndt)dA,
come mostrato in figura 2.15. Quindi
Figura 2.15:
V (t+dt) = V (t)+(volume spazzato da piccoli elementi di superf icie
integrato su tutti gli elementi).
Otteniamo:
V (t + dt) = V (t) +
Z
S
(f · ndt)dA.
Dunque
V (t + dt) − V (t) Z
= f · ndA.
dt
S
Infine, dal teorema della divergenza, abbiamo:
V̇ =
V̇ =
76
Z
V
∇ · f dV.
(2.2)
Per il sistema di Lorenz,
∇·f =
∂
∂
∂
[σ(y−x)]+ [rx−y−xz]+ [xy−bz] = −σ−1−b < 0.
∂x
∂y
∂z
Dato che la divergenza è costante in (1.13) abbiamo V̇ =
−(σ + 1 + b)V , che ha soluzione V (t) = V (0)e−(σ+1+b)t . Perciò
i volumi nello spazio delle fasi si rimpiccioliscono in maniera
esponenziale. La contrazione del volume impone forti limitazioni sulle possibili soluzioni delle equazioni di Lorenz, in
quanto impedisce che ci siano soluzioni quasi periodiche e
punti fissi o cicli limite repulsivi.
∗ Punti fissi.
Il sistema di Lorenz ha due tipi di punti fissi. L’origine
(x∗ , y ∗ , z ∗ ) = (0, 0, 0) è un punto fisso per tutti i valori dei
parametri. Per r > 1 c’è
anche una coppia simmetrica di
q
punti fissi x∗ = y ∗ = ± b(r − 1), z ∗ = r − 1. Lorenz li
chiamò C + e C − . Per r → 1+ , C + e C − si riuniscono con
l’origine in una biforcazione a forcone.
∗ Stabilità lineare dell’origine.
La linearizzazione nell’origine è
ẋ = σ(y − x)
ẏ = rx − y
ż = −bz
ottenuta omettendo i termini xy e xz in (1.12).
L’equazione per z è indipendente e mostra che z(t) tende a zero in modo esponenziale. Le altre due direzioni sono governate
dal sistema:
ẋ
ẏ
=
−σ
r
σ
−1
x
y
,
con traccia τ = −σ − 1 < 01 e determinante ∆ = σ(1 − r). Se
1
Per i sistemi in due dimensioni il
¯
¯ a
a12
¯ 11 −λ
¯
¯ a21
a22 − λ
det(A − λI) è dato da:
¯
¯
¯
¯ = (a11 − λ)(a22 − λ) − a12 a21
¯
77
r > 1 l’origine è un punto sella perchè ∆ < 0. Includendo la
direzione z, la sella ha una direzione uscente e due entranti.
Se r < 1, tutte le direzioni sono entranti. In particolare, dato
che
τ 2 − 4∆ = (σ + 1)2 − 4σ(1 − r) = (σ − 1)2 + 4σr > 0,
l’origine è un nodo stabile per r < 1.
∗ Stabilità globale dell’origine
In realtà per r < 1 possiamo mostrare che ogni traiettoria
raggiunge l’origine per t → ∞. L’origine è globalmente stabile. Quindi non possono esserci cicli limite o caos per r < 1.
Per la dimostrazione bisogna costruire una funzione di Liapunov2 . Non c’è una regola generale per costruire le funzioni
di Liapunov. In questo caso consideriamo
V (x, y, z) =
1 2
x + y2 + z2.
σ
Le superfici con V costante sono ellissoidi concentriche intorno
all’origine (figura 2.16) L’idea sta nel mostrare che se r < 1 e
(x, y, z) 6= (0, 0, 0) allora V < 0 lungo le traiettorie. Questo
implica che la traiettoria continua a muoversi verso un V più
= λ2 − (a11 + a22 )λ + a11 a22 − a12 a21 = λ2 − τ λ + ∆
e dunque gli autovalori sono dati da
λ1,2 =
2
τ±
√
τ 2 − 4∆
2
In generale se consideriamo il sistema ẋ = f (x) con un punto fisso in a e riusciamo a
trovare una funzione di Liapunov, cioè una funzione V(x) di classe C 1 a valori reali con le
seguenti proprietà:
· V (x) > 0 per ogni x 6= a e V (a) = 0 (cioè V definita positiva)
· V̇ < 0 per ogni x 6= a
allora a è globalmente asintoticamente stabile: per qualunque condizione iniziale x(t) → a
per t → ∞. In particolare il sistema non ha orbite chiuse.
78
Figura 2.16:
basso, e quindi penetra ellissoidi sempre più piccole per t →
∞. Ma V è limitato inferiormente da 0, quindi V (x(t)) → 0
e x(t) → 0. Calcoliamo ora
1
1
V̇ = xẋ+y ẏ+z ż = (yx−x2 )+(ryx−y 2 −xzy)+(zxy−bz 2 )
2
σ
= (r + 1)xy − x2 − y 2 − bz 2 .
Completando i quadrati nei primi due termini abbiamo:
r+1 2
r+1 2 2
1
V̇ = −[x −
y] − [1 − (
) ]y − bz 2 .
2
2
2
Vogliamo mostrare che il membro di destra di quest’ultima
equazione è strettamente negativo se r < 1 e (x, y, z) 6=
(0, 0, 0). E’ certamente non positivo, poichè è una somma negativa di quadrati. Potrebbe essere V̇ = 0. Questo richiederebbe
che i termini a destra si annullassero separatamente. Si avrebbe
quindi y=0, z=0 del secondo e terzo termine (in quanto, avendo assunto r < 1, il coefficiente di y 2 non è nullo). Il primo
termine diventa −x2 che si annulla solo se x=0. In conclusione
V̇ = 0 implica dunque (x,y,z)=(0,0,0). Altrimenti V̇ < 0.
∗ Stabilità di C + e C −
Supponiamo ora r > 1, in modo che esistano C + e C − . Si
79
può vedere che C + e C − sono linearmente stabili per
σ(σ + b + 3)
1 < r < rH =
σ−b−1
(assumendo anche che σ − b − 1 > 0). Usiamo il pedice H
perchè C + e C − perdono la loro stabilità in una biforcazione
di Hopf per r = rH . Cosa succede immediatamente dopo la
biforcazione, per r un po’ più grande di rH ? Si potrebbe supporre che C + e C − siano circondati da un piccolo ciclo limite
stabile. Questo succederebbe se la biforcazione di Hopf fosse supercritica. Ma in realtà è subcritica: i cicli limite sono
instabili ed esistono solo per r < rH [3]. Per r < rH , il ritratto di fase vicino a C + è mostrato schematicamente in figura
2.17. Il punto fisso è stabile ed è circondato da un ciclo a
Figura 2.17:
sella, un nuovo tipo di ciclo limite instabile che è possibile
solo in spazi delle fasi di 3 o più dimensioni. Il ciclo ha una
varietà instabile ed una varietà stabile bidimensionali. Per
r → rH dal basso il ciclo si restringe attorno al punto fisso.
Nella biforcazione di Hopf il punto fisso assorbe il ciclo a sella
e cambia in un punto sella. Per r > rH non ci sono attrattori
nelle vicinanze. Quindi per r > rH le traiettorie devono andar
via verso un attrattore lontano. Un parziale diagramma di biforcazione (figura 2.18),però, non mostra alcun indizio della
80
Figura 2.18:
presenza di oggetti stabili per r > rH . Si potrebbe quindi
pensare che tutte le traiettorie vengano respinte verso l’infinito. Anche questo non è possibile perchè si può provare che
tutte le traiettorie alla fine entrano e rimangono in un ellissoide di una certa grandezza. Un’altra ipotesi è quella che
ci sia un ciclo limite stabile del quale non siamo consapevoli.
Questo potrebbe essere possibile, ma Lorenz spiegò che per
r un po’ più grande di rH , ogni ciclo limite deve essere instabile. Quindi le traiettorie devono avere uno strano tipo di
comportamento a lungo termine. Sono respinte da un oggetto instabile all’altro e allo stesso tempo sono confinate in un
insieme limitato di volume zero, però riescono a muoversi su
questo insieme per sempre senza intersecare se stesse o altre
traiettorie.
2.4.3
Alcune definizioni
Definizione di Caos
Nessuna definizione del termine caos è universalmente accettata.
Si potrebbe dire che il caos è
’un comportamento aperiodico a lungo termine in un sistema deterministico che mostra una sensibile dipendenza dalle condizioni
81
iniziali’.
∗ 1. Comportamento aperiodico a lungo termine significa che ci sono traiettorie che non si stabilizzano in punti fissi,
orbite periodiche o quasi periodiche per t → ∞. Possiamo
dire che c’è un insieme aperto di condizioni iniziali che genera
traiettorie aperiodiche o che queste traiettorie si verificano
con probabilità diversa da zero, data una condizione iniziale
presa a caso.
∗ 2. Deterministico significa che il sistema non ha parametri
casuali o di disturbo. Il comportamento irregolare deriva dalla
non linearità del sistema e non da forze di disturbo.
∗ 3. Sensibile dipendenza dalle condizioni iniziali significa che traiettorie vicine si separano con velocità esponenziale.
Definizione di attrattore e di attrattore strano
Un attrattore, senza pretesa di rigore, è un insieme al quale convergono tutte le traiettorie nei dintorni. Per esempio i punti fissi
stabili e i cicli limite stabili sono attrattori. Più precisamente possiamo definire un attrattore come un insieme chiuso con le seguenti
proprietà:
∗ 1. A è un insieme invariante: ogni traiettoria x(t) che parte
in A rimane in A ad ogni istante.
∗ 2. A attrae un insieme aperto di condizioni iniziali: esiste un
insieme aperto U che contiene A tale che se x(0) ∈ U allora la
distanza da x(t) ad A tende a zero per t → ∞. Questo vuol
dire che l’insieme A attrae tutte le traiettorie che partono
sufficientemente vicine ad esso. Il più grande di questi U è
detto bacino di attrazione di A.
∗ 3. A è minimale: non ci sono sottoinsiemi propri di A che
soddisfano le condizioni 1. e 2.
Definiamo infine un attrattore strano come un attrattore che mostra
una sensibile dipendenza dalle condizioni iniziali.
82
Capitolo 3
Modelli matematici per il
sistema immunitario
3.1
Introduzione
I modelli matematici del sistema immunitario spesso si concentrano sulla riposta immunitaria agli agenti patogeni. Qui viene
analizzato un altro fondamentale processo che avviene nel sistema
immunitario: il mantenimento dell’autotolleranza, cioè la prevenzione di risposte immunitarie dannose per le parti del corpo.
La domanda che ci si pone è la seguente: quali sono i processi che
evitano che i linfociti autoreattivi, cioè i linfociti con recettori che
riconoscono antigeni (macromolecole che reagiscono con prodotti
del sistema immunitario) del corpo, causino malattie autoimmuni
in individui sani?
Prenderemo in considerazione due ipotesi in merito. Una prima
ipotesi è quella secondo la quale ai linfociti T autoreattivi viene
impedito di proliferare per l’esistenza di particolari cellule T regolatrici. Secondo un’altra ipotesi, invece, le cellule T diventano non
rispondenti agli autoantigeni attraverso la modifica del loro meccanismo di segnalazione delle cellule; gli immunologi usano la parola
anergia per riferirsi a questa mancanza di risposta delle cellule,
83
in particolare quando questa si traduce in una diminuzione della
risposta proliferativa. Tra le possibili spiegazioni del meccanismo
di induzione di questa anergia, la più semplice si basa sull’ipotesi che i linfociti regolano le loro soglie di attivazione in risposta
a stimoli ricorrenti. Nei prossimi paragrafi deriveremo modelli
matematici che rappresentano le dinamiche di una popolazione di
linfociti T autoreattivi in accordo con queste due ipotesi.
3.2
Tolleranza mediata da linfociti T
regolatori
3.2.1
Derivazione del modello
Consideriamo la dinamica di una popolazione di cellule T autoreattive la cui attivazione, proliferazione e sopravvivenza dipende
dall’interazione con una popolazione di cellule che presentano antigene (APC - antygene presenting cells). La popolazione di cellule
T è composta da due sottopopolazioni di cellule regolatrici ( TR )
ed effettrici (TE ).
Le cellule TE sono responsabili dei disordini autoimmuni se le cellule TR non controllano la loro espansione dipendente dall’attivazione.
Le cellule TR e TE a riposo possono morire o formare coniugati con
le cellule APC libere. La coniugazione può essere produttiva, dando luogo all’attivazione di cellule T, oppure non produttiva, cosı̀
che le cellule T rimangono a riposo. L’attivazione delle cellule T
è transitoria, dunque le cellule T attivate giungeranno spontaneamente alla condizione di riposo. Solo le cellule TR e TE attivate
interagiscono tra loro. Le sole cellule TE attivate producono un
fattore di crescita, sotto la cui azione le cellule TE e TR si dividono.
Prima di procedere alla derivazione del modello, introduciamo singolarmente le variabili e le costanti che saranno coinvolte nelle
equazioni:
84
RF
densità delle cellule TR libere
EF
densità delle cellule TE libere
RC
densità delle cellule TR coniugate
EC
densità delle cellule TE coniugate
RA
densità delle cellule TR attivate
EA
densità delle cellule TE attivate
AF
densità delle APC libere
A
densità totale delle APC
c
tasso costante di formazione di coniugati
d
tasso costante di dissociazione di coniugati
r
tasso costante di ritorno dallo stato attivo allo stato di
riposo
p
tasso costante di divisione delle cellule TE attivate che dà
luogo a due cellule TE a riposo
s
tasso costante di trasformazione delle cellule TE attive in
cellule TE a riposo senza divisione, e di divisione delle cellule TR
attivate in due cellule TR a riposo
δ
tasso costante di morte
α
probabilità che una cellula T sia attivata
Partendo dalle considerazioni fatte finora e dal diagramma in figura (3.1), con le notazioni appena introdotte, possiamo considerare
il seguente sistema di sei equazioni differenziali ed un’equazione
di conservazione:
dRF
= 2sRA EA + rRA + d (1 − α) RC − cRF AF − δRF
dt
(3.1)
dEF
= sRA EA +2pEA +rEA +d (1 − α) EC −cEF AF −δEF
dt
(3.2)
dRC
= −dRC + cRF AF
dt
(3.3)
dEC
= −dEC + cEF AF
dt
(3.4)
85
Figura 3.1:
dRA
= dαRC − sRA EA − rRA
dt
dEA
= dαEC − sRA EA − pEA − rEA
dt
A = AF + RC + EC .
(3.5)
(3.6)
(3.7)
Nella (3.1) l’incremento delle RF è dato da tre termini: il primo
termine 2sRA EA che indica la trasformazione di cellule T attivate
in cellule T a riposo in seguito all’incontro di una cellula RA con
una EA (la moltiplicazione per due è dovuta al comportamento
della s che divide ogni TR attivata in due TR a riposo); l’addendo
86
rRA indica la trasformazione di cellule TR attivate in TR a riposo
ed infine il termine d(1−α)RC che indica la dissociazione di cellule
TR coniugate ed è moltiplicato per (1 − α), cioè per la probabilità
che queste cellule non siano attivate. Abbiamo anche due termini che danno un contributo negativo: le cellule TR libere possono
diminuire nel tempo formando coniugati con le APC (-sRF AF )
oppure per morte naturale (-δRF ).
Nella (3.2) il termine sRA EA non è moltiplicato per due in quanto la s fa sı̀ che le cellule TE attivate si trasformino in TE a riposo senza divisione. Gli altri contributi positivi sono dati dalla
trasformazione di cellule TE attivate in TE a riposo (rEA ), dalla
dissociazione di cellule TE coniugate, ma allo stesso tempo non attivate d(1 − α)EC ed infine dal termine 2pEA che trasforma ogni
cellula TE attivata in due cellule TE a riposo. Inoltre la EF può
diminuire nel tempo per la formazione di coniugati con le APC
(-cEF AF ) o per morte naturale (-δ EF ).
Nella (3.3) la densità delle TR coniugate può diminuire per la dissociazione di coniugati (-dRC ) oppure aumentare per la formazione
di coniugati con le APC (cRF AF ).
Nella (3.4) la situazione è analoga a quella dell’equazione precedente, cioè la densità delle TE coniugate diminuisce proporzionalmente alla dissociazione di coniugati (-dEC ) ed aumenta proporzionalmente alla formazione di coniugati con le APC (cEF AF ).
Nella (3.5) la densità delle cellule TR attivate può subire un decremento a causa della trasformazione di cellule TR attivate in TR a
riposo (-rRA ), oppure per la formazione di cellule TR e TE a riposo
in seguito all’interazione fra TR e TE attivate (-sRA EA ); l’incremento delle RA è dato dal termine dαRC cioè dalla dissociazione
di coniugati che dà luogo a cellule TR attivate.
Nella (3.6) osserviamo che i termini -rEA , dαEC assumono lo stesso significato rispettivamente di -rRA e dαRC nell’equazione precedente, ricordando però che ora si ha a che fare con le TE e non
con le TR . La stessa considerazione vale per il termine -sRA EA .
L’unica differenza con la (3.5) sta nel termine -pEA che dà un
87
contributo negativo alla (3.6) ed indica la divisione di TE attivate
in due TE a riposo. La (3.7) esprime il fatto che la densità totale delle APC è data dalla somma delle APC libere, con le APC
coniugate con le TR o con le TE .
In realtà ci interessano le dinamiche delle densità totali delle TR e
delle TE , che indichiamo rispettivamente con R ed E. Le rispettive
derivate sono date da:
dRF
dRC dRA
dR
=
+
+
dt
dt
dt
dt
(3.8)
dE
dEF
dEC dEA
=
+
+
.
dt
dt
dt
dt
(3.9)
Da (3.8), (3.1),(3.2) e (3.3) otteniamo:
dR
= 2sRA EA + rRA + d (1 − α) RC − cRF AF − δRF − dRC
dt
+cRF AF + dαRC − sRA EA − rRA
cioè
dR
= sRA EA − δRF .
dt
Da (3.9), (3.2),(3.4) e (3.6) otteniamo:
(3.10)
dE
= sRA EA + 2pEA + rEA + d (1 − α) EC − cEF AF − δEF − dEC
dt
+cEF AF + dαEC − sRA EA − pEA − rRA ,
cioè
dE
= pEA − δEF .
dt
(3.11)
Per maggiore semplicità assumiamo che le densità delle cellule T
coniugate e attivate siano trascurabili se confrontate con le densità
totali. Dunque si ha:
R = R F + R C + R A ≈ RF
88
(3.12)
e
E = EF + EC + EA ≈ EF .
(3.13)
Le approssimazioni (3.12) e (3.13) sono valide se c << d ed αd ≤ r,
che assicurano che all’equilibrio la densità delle cellule coniugate
sarà molto più piccola della densità delle cellule libere, e la densità
delle cellule attivate è al massimo uguale alla densità delle cellule
coniugate.
Con queste assunzioni, le equazioni (3.10) e (3.11) diventano rispettivamente:
dR
= sRA EA − δR
dt
e
dE
= pEA − δE.
dt
Assumiamo che le densità delle cellule T coniugate siano in stato
quasi stazionario, dunque poniamo:
dRC
= 0,
dt
e
dEC
= 0.
dt
Otteniamo, allora:
−dRC + cRF AF = 0,
cioè
c
RC = AF RF
d
(3.14)
e
−dEC + cEF AF = 0
89
cioè
c
EC = AF EF .
d
(3.15)
Sostituendo queste espressioni nell’equazione di conservazione (3.7)
si ha:
c
c
c
c
A = AF + AF RF + AF EF = AF 1 + RF + EF
d
d
d
d
A
⇒ AF =
.
c
1 + d RF + dc EF
µ
¶
Sostituendo quest’ultima in (3.14) otteniamo:
RC =
cARF
c ARF
³
´ =
d+cRF +cEF =
d
d
c
+
R
+
E
F
F
d
c
d
c
ARF
+ RF + EF
e, allo stesso modo, sostituendo in (3.15) l’espressione di AF ,
otteniamo:
AEF
AEF
c
´ =
.
EC = c ³ d
d
d
+ RF + EF
+ RF + EF
c
d
c
Tenendo conto delle approssimazioni (3.12) e (3.13) avremo dunque:
RC =
d
c
AR
+R+E
d
c
AE
.
+R+E
e
EC =
Assumiamo che anche le cellule T attivate siano in stato quasi
stazionario. Ponendo dunque
dRA
=0
dt
avremo:
dαRC − sRA EA − rRA = 0 ⇔ (sEA + r) RA = dαRC
90
⇔ RA =
mentre ponendo:
dαRC
;
sEA + r
(3.16)
dEA
= 0,
dt
avremo:
dαEC − sRA EA − pEA − rEA = 0,
sostituendo in quest’ultima equazione l’espressione di RA ottenuta
in (3.16) si ha:
dαRC
− pEA − rEA = 0
sEA + r
⇔ dαEC (sEA + r) − sdαEA RC − pEA (sEA + r) − rEA (sEA + r) = 0
dαEC − sEA
⇔ rdαEC + sdαEC EA − sdαRC EA − EA (p + r) (r + sEA ) = 0
⇔ rdαEC + sdαEC EA − sdαRC EA − rEA (p + r) − sEA2 (p + r) = 0
³
⇔ rdαEC + [(sdαEC − sdαRC − r (p + r)] EA − s p + r)EA2 = 0
dunque abbiamo un’equazione di secondo grado in EA . Una sola
delle due soluzioni è positiva e quindi solo questa soluzione ha un
significato dal punto di vista biologico. L’espressione di questa
soluzione è data da:
EA =
q
4d (p + r) rsαEC + [r (p + r) + dsα (RC − EC )]2 − r (p + r) + dsα (RC − EC )
2 (p + r) s
Quindi, in conclusione abbiamo ottenuto un sistema di due equazioni
differenziali:
dR
= sRA EA − δR
dt
e
dE
= pEA − δE
dt
91
con
RA =
EA =
q
dαRC
sEA + r
4d (p + r) rsαEC + [r (p + r) + dsα (RC − EC )]2 − r (p + r) + dsα (RC − EC )
2 (p + r) s
EC =
RC =
d
c
AE
+R+E
d
c
AR
+R+E
dove R ed E sono le densità totali delle cellule TR e TE , A è la
densità totale dei siti di coniugazione delle APC (che assumiamo
essere costante), c è il tasso di coniugazione, d è il tasso di dissociazione, δ è il tasso di morte, s è il tasso di soppressione ed r è il
tasso di conversione allo stato di riposo di una cellula T attivata.
3.2.2
Analisi del modello
Il piano delle fasi di questo modello presenta, al più, 4 stati stazionari,
di cui due stabili, si veda la Figura 3.3. Si vede immediatamente
che un primo stato stazionario è quello banale, cioè (0,0), infatti:
E = 0 ⇒ EC = 0
R = 0 ⇒ RC = 0
RC = 0 ⇒ RA = 0
RC = 0 ed EC = 0 ⇒ EA = −
r(p + r) − r(p + r)
=0
2(p + r)s
e dunque dR
= 0 e dE
= 0. Lo stato (0,0) corrisponde aldt
dt
l’estinzione delle cellule TR e TE ed è instabile. Altri due stati
92
Figura 3.2: Nel modello sono stati usati i seguenti valori dei parametri: p=2
giorni−1 , r=0.3 giorni−1 , d=6 giorni−1 , c=0.06 cdu−1 giorni−1 , δ=0.02 giorni−1 ,
α=1 e s=0.07 cdu−1 giorni−1 , cdu=unità di densità di cellule
Figura 3.3: Nel modello sono stati usati i seguenti valori dei parametri: p=2
giorni−1 , r=0.3 giorni−1 ,d=6 giorni−1 ,, c=0.06 cdu−1 giorni−1 ,δ=0.02 giorni−1 ,
α = 1, s=0.07 cdu−1 giorni−1 ; cdu=unità di densità di cellule
93
stazionari sono dati da un punto sella instabile in cui TR e TE
coesistono (R3 , E3 ) ed uno stato stabile di coesistenza di TR e
TE (R2 , E2 ). Infine l’ultimo stato stabile in cui le cellule TR sono
eliminate per competizione dalle cellule TE è (0, E1 ). Interpretiamo la coesistenza stabile di cellule TR e TE come autotolleranza
e l’eliminazione competitiva delle cellule TR da parte delle cellule
TE come autoimmunità. L’esistenza di questi stati stazionari nel
piano delle fasi è controllata dai relativi valori dei parametri che
determinano la crescita della popolazione di TR e la crescita della
popolazione di TE . Se la crescita netta della popolazione delle TR
è relativamente alta rispetto a quella delle TE si arriva ad una
stabilità globale dello stato di autotolleranza. Invece una crescita
relativamente bassa porta ad una scomparsa dello stato di autotolleranza e ad una stabilità globale dello stato di autoimmunità.
Un importante parametro di controllo è la densità delle APC, cioè
A. Nella Figura 3.2 è rappresentato un tipico diagramma di biforcazione della densità totale di TR e TE (R + E) in funzione del
valore di A. Densità troppo basse di APC non riescono a sostenere
la popolazione delle cellule T. Lo stato (0,0) è globalmente stabile, mentre lo stato (0, E1 ) è instabile e non ha significato fisico
in quanto E1 < 0. In seguito ad una biforcazione transcritica che
coinvolge questi due stati, lo stato (0, E1 ) diventa stabile ed inoltre acquista significato fisico poichè (E1 ≥ 0). Per un intervallo
di valori relativamente bassi di A, solo le cellule TE possono essere
sostenute nella popolazione. Per valori più alti di A, a seguito di
una biforcazione a nodo sella, che conduce alla formazione di una
sella instabile (R3 , E3 ) e dello stato stabile (R2 , E2 ), il sistema
diventa ’bistabile’, cosı̀ che, a seconda delle condizioni iniziali,
possono essere raggiunti o l’autoimmunità o gli stati di tolleranza.
Per valori ancora più alti di A c’è una biforcazione transcritica che
coinvolge la sella instabile (R3 , E3 ) e lo stato di esclusione competitiva (0, E1 ). Quest’ultimo stato diventa instabile e lo stato
di coesistenza prima instabile diventa stabile, ma senza significato fisico perchè R3 è ora negativo. Come conseguenza di questa
94
biforcazione, lo stato di coesistenza di cellule TR e TE (R2 , E2 )
diventa il solo stato stabile con significato fisico. Notiamo, infine,
che al crescere di A, la popolazione E +R nello stato stazionario di
coesistenza tende asintoticamente ad un valore costante. Questo
significa che la soppressione richiede una presenza minimale di
cellule TR .
3.3
Tolleranza tramite la regolazione
delle soglie di attivazione
3.3.1
Derivazione del modello
L’attivazione, la proliferazione e la sopravvivenza dei linfociti T
richiedono continue interazioni dei loro recettori (TCR) con i peptidi leganti sulla membrana delle APC.
Il diagramma in figura 3.4A può essere tradotto nelle seguenti due
equazioni differenziali ed un’equazione di conservazione:
dTF
= (1 − α)dC − cTF AF − δTF + 2dαC
dt
= (1 + α)dC − cTF AF − δTF
dC
= cTF AF − dC
dt
A = AF + C
dove le quantità utilizzate hanno i seguenti significati:
TF densità delle cellule T libere
AF densità delle APC libere
A densità totale delle APC
C densità delle cellule coniugate
c tasso costante di formazione dei coniugati
d tasso costante di dissociazione dei coniugati
δ tasso costante di morte delle cellule libere
α probabilità che una cellula T sia attivata
95
Figura 3.4:
Siamo interessati a studiare la variazione della densità totale delle
cellule T nel tempo. La ragione di questo è soprattutto pratica,
in quanto sperimentalmente è molto più complicato contare separatamente cellule T libere e cellule T coniugate, piuttosto che
contare cellule T miste (sia coniugate che libere).
Indichiamo dunque con T la densità totale delle cellule T nel
tempo. Avremo:
T = TF + C.
Prendendo le derivate rispetto al tempo di entrambi i membri
otteniamo:
dT
dTF
dC
=
+
= dC + αdC − cTF AF − δTF + cTF AF − dC
dt
dt
dt
= αdC − δTF = dαC − δ(T − C).
Assumendo che i coniugati siano in stato quasi stazionario, abbia-
96
mo:
dC
= cTF AF − dC = 0.
dt
Sostituendo TF e AF con le loro espressioni in termini di A,T e C
otteniamo un’equazione del secondo ordine:
c(T − C)(A − C) − dC = 0
Risolvendola otteniamo due soluzioni di cui scegliamo quella più
piccola in quanto l’altra soluzione verrebbe ad essere maggiore di
T e questo non è possibile.
c(T − C)(A − C) − dC = 0 ⇔ (cT − cC)(A − C) − dC = 0
⇔ cT A − cT C − cCA + cC 2 − dC = 0
cioè
cC 2 − (cT + cA + d)C + cT A = 0.
Dunque la soluzione che ci interessa è data da:
C=
c(T + A) + d −
q
−4AT c2 + (c(T + A) + d)2
2c
(3.17)
Quindi abbiamo ottenuto un’equazione differenziale
dT
= −dαC − δ(T − C)
dt
(3.18)
dove T è la densità delle cellule T, e C è la densità dei coniugati
nello stato quasi stazionario ed è data dalla (3.17).
Secondo l’ipotesi della regolazione della soglia di attivazione, i
continui segnali da parte dei TCR dovrebbero condurre ad un
adattamento del meccanismo di trasduzione dei segnali. Per inserire questa caratteristica nel modello, è necessario definire la
probabilità α di coniugazione produttiva in funzione dello stato
del meccanismo di segnalazione dei linfociti coniugati. Questo
meccanismo coinvolge due enzimi: la chinasi e la fosfatasi. I linfociti, dopo la coniugazione, saranno attivati se l’attività della
chinasi è più alta di quella della fosfatasi.
97
La dinamica delle attività di questi enzimi può essere descritta
attraverso due equazioni differenziali:
dK
= rk (K0 (1 + σ) − K),
dt
dP
= rp (P0 (1 + σ) − P ),
dt
(3.19)
dove
K è l’attività della chinasi,
P è l’attività della fosfatasi,
rk è il tasso di turnover della chinasi,
rp è il tasso di turnover della fosfatasi,
K0 è l’attività basale della chinasi nello stato stazionario,
P0 è l’attività basale della fosfatasi nello stato stazioanario,
σ è l’entità dello stimolo ai tassi di produzione, che assume il valore
0 se la cellula è libera e σ se è coniugata.
Assumiamo che il tasso di turnover della chinasi sia maggiore di
quello della fosfatasi (rk > rp ) e che, per qualsiasi stimolo, l’attività nello stato stazionario della fosfatasi sia maggiore di quella
della chinasi (P0 > K0 ). Queste condizioni servono ad assicurare
che il meccanismo di segnalazione abbia proprietà adattive, cioè
che si accenda temporaneamente e si spenga alla fine se lo stimolo
persiste.
Abbiamo bisogno di due ulteriori approssimazioni. Innanzitutto
assumiamo che il turnover dell’attività della chinasi è molto veloce
se paragonato con il tasso di dissociazione dei coniugati (rk >> d)
cosı̀ come col tasso di turnover dell’attività della fosfatasi (rk >>
rp ). Sotto queste ipotesi, l’attività della chinasi è in stato quasi
stazionario e può essere approssimata o da K = K0 (1 + σ) o da
K = K0 , rispettivamente quando il linfocita T è coniugato con
una APC, dando luogo ad uno stimolo σ o quando il linfocita è
libero, non producendo alcuno stimolo. Assumiamo infine che per
ogni densità di cellule T e APC, i processi di coniugazione e dissociazione siano quasi in equilibrio. Questo implica la stazionarietà
delle funzioni densità di probabilità delle popolazioni di cellule T
98
coniugate e libere relative all’attività della fosfatasi.
Queste due ulteriori assunzioni sono fatte essenzialmente per semplificare il modello da un punto di vista matematico, ma hanno anche un riscontro biologico quando la popolazione diventa costante.
Le funzioni densità di probabilità delle cellule T coniugate e libere,
sono indicate rispettivamente con ρC e ρF . ρC (P )dP rappresenta
la frazione di coniugati la cui attività della fosfatasi è compresa
tra P e P + dP , analogo è il significato di ρF . Le dinamiche di ρC
e ρF sono descritte dal seguente sistema di equazioni differenziali
alle derivate parziali del primo ordine:
∂
∂ρC
+
(PC ρC ) = −dρC + cE ρF ,
∂t
∂P
∂
∂ρF
+
(PF ρF ) = dρC − cE ρF ,
∂t
∂P
dove PC ed PF sono le funzioni che governano la dinamica della fosfatasi nei regimi coniugato e libero, cioè il membro destro
dell’equazione (3.19) con σ > 0 e σ = 0 rispettivamente:
PC = rP (P0 (1 + σ) − P ),
PF = rF (P0 − P ),
(3.20)
(3.21)
cE e d sono rispettivamente il tasso di passaggio dallo stato libero
a quello coniugato (cE = cAF = c(A − C)) ed il tasso di passaggio
dallo stato coniugato a quello libero. Notiamo che cE dipende
da T tramite C. Cerchiamo le soluzioni nello stato stazionario,
dunque poniamo:
∂ρC
= 0,
∂t
∂ρF
=0
∂t
e otteniamo il seguente sistema di equazioni differenziali:
∂
(PC ρC ) = −dρC + cE ρF ,
∂P
∂
(PF ρF ) = dρC − cE ρF ,
∂P
99
(3.22)
notando che i membri destri di queste ultime due equazioni sono
uno l’opposto dell’altro, possiamo sommarli ottenendo la seguente
equazione:
∂
(PC ρC + PF ρF ) = 0
∂P
che integrata diventa:
PC ρC + PF ρF = K.
Siccome ρC e ρF sono funzioni densità di probabilità che tendono
a zero per P → ∞ deve essere K = 0, che dà luogo alla seguente
equazione:
PF ρF = −PC ρC .
Risolvendo questa equazione rispetto a ρF abbiamo:
−PC ρC
,
PF
ρF =
e sostituendola nell’equazione (3.22) otteniamo:
PC ρC
∂
(−PC ρC ) = dρC + cE
,
∂P
PF
cioè
d
∂ρC
cE
∂PC
= (−
)ρC .
−
−
∂P
PC
PF
PC ∂P
La soluzione di questa equazione è data da:
ρC = N e
R
c
(− Pd − PE −
C
F
∂PC
∂P
PC
)dP
.
(3.23)
Utilizzando le espressioni di PF e PC date nelle (3.20) e (3.21) si
ha:
Z
d
d
− dP = log |P0 (1 + σ) − P | rP ,
PC
Z
cE
cE
dP = log |P0 − P | rF ,
−
PF
e
Z
∂PC 1
dP = log |P0 (1 + σ) − P |−1 .
−
∂P PC
100
Sostituendo questi integrali nell’equazione (3.23) otteniamo:
ρC
cE
d
N [(P (1 + σ) − P ) rP −1 (P − P ) rP ], P ≤ P ≤ P (1 + σ)
0
0
0
0
=
0
altrimenti
La soluzione è divisa in due pezzi perchè nello stato stazionario i valori di P
sono sempre contenuti nell’intervallo [P0 , P0 (1 + σ)], i cui estremi sono i valori di P nello stato stazionario ricavati in accordo con l’equazione (3.19)
rispettivamente nei casi in cui le cellule T sono sempre libere o sempre
coniugate.
La frazione α di cellule T che è attivata e si divide quando termina la coniugazione è pari alla frazione di cellule T che nell’istante di separazione dalle
APC ha K > P . Sarà dunque:
α=
Z
K0 (1+σ)
P0
ρC dP.
Sostituendo questo valore di α, che è quindi una funzione di T, nell’equazione
(3.18) definiamo completamente la dinamica della popolazione di cellule T
con soglia di attivazione regolabile.
3.3.2
Analisi del modello
Se il valore dell’attività della fosfatasi all’inizio della coniugazione è P ≥
K0 (1 + σ) allora questo è sufficiente (sebbene non necessario) a prevenire
l’attivazione delle cellule T. La soglia di attivazione è modulata dalla storia
degli stimoli alle cellule T, che determina il valore dell’attività della fosfatasi ad ogni istante. Dal punto di vista della biologia della popolazione delle
cellule T, in questo modello, la soglia di attivazione è dipendente dalla frequenza delle interazioni delle cellule T con le APC (cE ), cioè dalla frequenza
degli stimoli alle singole cellule T (figura 3.5). Se le cellule T fossero sempre
libere, la funzione densità di probabilità della fosfatasi corrisponderebbe ad
una delta di Dirac centrata in P0 . Se tutti i linfociti fossero permanentemente
coniugati con le APC, con lo stesso stimolo σ, allora la funzione densità di
probabilià sarebbe una delta di Dirac centrata in P0 (1 + σ) (Figura 3.6).
Dato che le cellule T si alternano tra periodi di libertà e di coniugazione,
la funzione densità di probabilità stazionaria dei linfociti è non nulla per
101
Figura 3.5: cinetica della fosfatasi (linea nera) e della chinasi (linea grigia). La
probabilità che l’attività della fosfatasi P superi l’attività della chinasi all’istante
di deconiugazione aumenta con la frequenza degli incontri.
Figura 3.6: Funzioni densità di probabilità stazionaria dell’attività P della fosfatasi nella popolazione di cellule T coniugate alle densità indicate di cellule T
(P0 = 60, σ = 1000).
102
valori di P nell’intervallo [P0 , P0 (1 + σ)]. La frequenza delle interazioni con
le APC per ogni cellula T decresce man mano che la densità delle cellule
T aumenta a causa della competizione. Questo implica che, all’aumentare
della densità delle cellule T, la mediana della funzione densità di probabilità
relativa all’attività della fosfatasi nelle cellule T coniugate (ρC (P )) si avvicina al valore P0 ; in modo reciproco se la densità delle cellule T decresce, la
mediana della funzione densità di probabilità si avvicina a P0 (1 + σ) (Figura
3.7). Questo significa che la frazione α di cellule che passa dalla coniugazione
all’attivazione aumenta con la densità delle cellule T. Ciò definisce un ciclo di
retroazione positivo, tale che aumenti (diminuzioni) della densità delle cellule
T danno luogo a valori medi più alti (più bassi) di α, il che porta ad un ulteriore incremento (diminuzione) della densità delle cellule T. Questo ciclo di
retroazione positivo previsto dal presente modello è l’opposto di un controllo
della popolazione retroattivo dipendente dalla densità . In questo modello,
questo ciclo interagisce con il ciclo di retroazione negativo dovuto all’effetto
della competizione sulla densità dei coniugati. Per questo motivo il modello
ha due possibili stati stazionari: uno in cui la popolazione di linfociti è estinta
e uno in cui è limitata dalla disponibilità delle APC e composta prevalentemente di linfociti non anergici (Figura 3.7). Il diagramma di biforcazione
Figura 3.7: Diagramma di fase del modello indicante il tasso di morte (linea
tratteggiata) ed i tassi di crescita (linee continue) i per valori indicati del parametro
di controllo
P0
K0
= 60.
103
(Figura 3.8) della popolazione nello stato stazionario in funzione del rapporto
P0
, che è una misura dell’adattabilità del meccanismo di segnalazione, indica
K0
che il contributo principale della presenza di soglie regolabili, per valori inP0
, è quello di cambiare la grandezza dei bacini di attrazione dei
termedi di K
0
due stati stabili spostando la posizione del punto di equilibrio instabile; man
Figura 3.8: Diagramma di biforcazione ottenuto variando il parametro di controllo
P0
K0
che determina la capacità di adattamento del meccanismo di segnalazione; gli
stati stazionari stabili e instabili sono indicati rispettivamente con linee continue
e tratteggiate.
mano che questo parametro di controllo fa aumentare la dimensione della
popolazione nel punto di equilibrio instabile e diminuire quella nello stato
stabile limitato dalle APC, c’è una biforcazione a nodo sella per un valore
critico di questo parametro nel quale i due punti si fondono in uno solo. Al
di là di questo valore critico tali punti scompaiono. In questo modello l’unico
modo affinchè la popolazione di cellule T autoreattiva persista è la competizione dovuta ad un numero limitato di APC; se predomina l’effetto della
regolazione delle soglie di attivazione, la popolazione si estingue.
3.4
Conclusioni
Abbiamo mostrato due modelli matematici in cui l’autotolleranza, mediante
il controllo dell’espansione della popolazione di cellule T autoreattive, è ot104
tenuta attraverso due meccanismi: la soppressione da parte di linfociti T
regolatori e la regolazione delle soglie di attivazione. Nel secondo modello l’anergia proliferativa decresce con la densità delle cellule T relativa alle
APC. Il modello può quindi spiegare il controllo dell’espansione delle cellule
T autoreattive, ma non la loro permanenza. Nel primo modello l’esistenza
di uno stato stazionario di tolleranza in cui le cellule TR e TE coesistono è
compatibile col fatto che da ogni individuo autotollerante possono essere estratte cellule T autoreattive che causano autoimmunità se iniettate in altri
individui. In contrasto con il secondo modello questo sarebbe vero anche in
assenza di un afflusso continuo di cellule dal timo. Si può dedurre quindi
che modelli che spieghino l’equilibrio tra proliferazione di cellule e morte,
in assenza di sorgenti esterne, devono includere qualche forma di soppressione dipendente dalla densità delle cellule T. Il primo modello mostra che
la persistenza e la crescita della popolazione delle cellule TR è dipendente
dalle cellule TE che controllano e questa dipendenza aumenta l’efficienza della funzione soppressiva. Concludiamo, facendo alcune considerazioni più in
generale sul problema della regolazione dell’autotolleranza ed il problema correlato dell’adattamento del sistema immunitario a stimoli cronici di antigeni.
Possiamo porci diverse domande:
∗ La presenza di soglie di attivazione regolabili e la soppressione
attraverso cellule T regolatrici non sono due meccanismi che
si escludono a vicenda. Quali proprietà dinamiche dobbiamo
aspettarci se l’anergia delle cellule T è indotta e mantenuta
sia dall’interazione con le APC che dall’interazione con altre
cellule T anergiche?
Si supponga che la frazione α di cellule TE e TR attivate attraverso la coniugazione con le APC dipenda dalla frequenza
delle coniugazioni e dalla regolazione. Consideriamo anche
la frequenza delle interazioni tra le cellule T e le APC negli
stati stazionari del sistema (R, E) con α fissato. Lo spazio
delle fasi rimarrà inalterato se i parametri sono tali che le
coniugazioni con le APC negli stati stazionari stabili siano
abbastanza rare che la regolazione sia insignificante, cioè α
sia costante. In queste condizioni ci si aspetta che l’estinzione
105
sia delle cellule TR che delle cellule TE sis stabile. Invece se
i parametri sono tali che le interazioni con le APC siano abbastanza frequenti da ridurre le frazioni di cellule TE e TR
coniugate che diventano attivate, allora gli stati stazionari
possono scomparire. Comunque queste complicazioni aggiuntive richiedono dei modelli appropriati.
∗ Il sistema immunitario si adatta agli stimoli continui di antigeni. Di solito, le popolazioni di cellule T stimolate cronicamente diventano non rispondenti quando sono esaminate nel
loro complesso. La domanda è: quanto l’adattamento, ottenuto come acquisizione di mancanza di risposta complessiva da
parte delle cellule T, avviene al livello del meccanismo di segnalazione delle singole cellule o al livello della popolazione?
La dipendenza dalla densità di cellule T della mancanza di
risposta prevista rispettivamente dal modello di regolazione
e dal modello TAT è una l’opposta dell’altra. La soppressione aumenta all’aumentare della densità di cellule TR per
APC, e la risposta globale delle cellule T (cioè la risposta di
un miscuglio di cellule TR e TE ) dovrebbe diminuire di conseguenza. Questo dovrebbe consentire di valutare quale sia
il meccanismo di adattamento dominante in un dato setting
sperimentale nel quale la capacità complessiva di risposta in
funzione della densità di cellule T per APC sia misurabile.
∗ La questione più importante riguardo ad un qualsiasi meccanismo di autotolleranza è la seguente: come possono essere date risposte immunitarie efficienti agli agenti patogeni
esterni, mentre il sistema immunitario resta fortemente autotollerante?
La risposta delle singole cellule agli antigeni esterni dovrebbe
essere facilitata e più sostenuta se l’aumento dello stimolo per
APC (σ) non è concomitante con un forte aumento della APC
stimolatrici. Quindi, un aumento delle APC, che è spesso as106
sociato alle infezioni, aumenterà la frequenza degli eventi di
coniugazione e dunque faciliterà l’adattamento. Questa facilitazione dell’adattamento può essere controbilanciata dal fatto
che una volta che le cellule T sono attivate, le loro soglie di
attivazione si abbassano e probabilmente diventano più resistenti alla regolazione. Per quanto riguarda la tolleranza
mediata da cellule T regolatrici, uno degli aspetti riguardanti la questione posta è che gli antigeni esterni sono sempre
presenti insieme agli autoantigeni e quindi le cellule T autoreattive potrebbero prevenire la risposta immunitaria. La
risposta immunitaria può essere efficientemente suscitata per
quegli antigeni esterni che rimuovono autoantigeni dalle APC
e/o che si presentano in concomitanza con un aumento delle
APC. Un’altra soluzione, suggerita ad esempio dal diagramma
di biforcazione in figura 3.2, è quella che le cellule T regolatrici
sono fortemente indirizzate verso autoantigeni. Consideriamo
una situazione in cui la maggior parte delle cellule T in circolazione incontra un numero troppo basso di APC per sostenere
le cellule T regolatrici. Queste cellule T saranno solo cellule
TE ma non dovrebbero causare autoimmunità perchè la loro
espansione è limitata dal fatto che le APC disponibili sono
troppo poche. Un numero più basso di cellule T riconoscerebbero abbastanza APC da espandersi a numeri molto elevati, e
quindi da causare autoimmunità. In questo caso, comunque,
la densità della APC è sufficiente a sostenere le cellule TR , e
dunque l’espansione clonale è controllata. Sebbene in questo
regime di bistabilità i cloni autoreattivi possono raggiungere
o l’autoimmunità o la tolleranza, ci sarà una forte tolleranza verso questi antigeni se il timo esporta abbastanza cellule
TR da assicurare che ogni popolazione (R, E) si troverà nel
bacino di attrazione dello stato di coesistenza di cellule TR e
TE . In questa situazione il modello predice che la varietà di
cellule T può essere divisa in due insiemi di cloni di linfociti:
un insieme contenente solo cellule TE ed un altro contenente
107
sia cellule TE che TR . Nel primo insieme la quantità dei cloni
è determinata solo dalla disponibilità delle APC, mentre nel
secondo insieme dalla soppressione mediata dalle cellule T regolatrici.
In queste condizioni la risposta immunitaria, guidata principalmente da un aumento delle APC, dovrebbe essere dovuta al primo insieme, mentre l’autotollerazna dovrebbe essere
assicurata dal secondo insieme. La plausibilità di questo scenario dipende criticamente dalla reattività incrociata dei TCR
e dalla copresenza di più peptidi sulle stesse APC: se un antigene esterno provochi una risposta immunitaria dipenderà da
quanti cloni del primo e del secondo insieme riconosceranno
peptidi sulle stesse APC.
108
Bibliografia
[1] Lawrence Perko. Differential Equations and Dynamical
Systems. Springer - Verlag, 1991.
[2] F.Verhulst, Nonlinear Differential Equations and Dynamical System. Springer - Verlag.
[3] S.H.Strogatz, Nonlinear Dynamics and Chaos (with application to Physics, Biology, Chemistry and Engineering.
Perseus Books Publishing, 1994.
[4] C.D.Pagani, S.Salsa Analisi Matematica (vol.2). Masson.
[5] J.Carneiro, T.Paixao, D. Milutinovic, J.Sousa, K.Leon
R.gardner, J.Faro Immunological self - tolerance: Lessons
from mathematical modeling. Journal of Computational
and Applied Mathematics 184 (2005)
109