SISTEMI DI RADICI
Tesina per la Laurea Quadriennale in Matematica
Professore:
Rita Fioresi
Studente:
Marzia Dalla Venezia
Capitolo 1
Sistemi di radici
Sia V uno spazio vettoriale nito-dimensionale euclideo su R .
Denizione 1.1. Sia H un iperpiano qualsiasi contenuto in V. Sia w ∈ H e
sia v ∈ {H}⊥ . Si denisce riessione rispetto all'iperpiano H l'applicazione:
Sv : V
→
V
w
7→
w
v
7→ −v
denita da
Sv (z) = z − 2 ·
< v, z >
v
< v, v >
(1.1)
Denizione 1.2. Un sottoinsieme R ⊆ V si dice un sistema di radici se
valgono le seguenti proprietà:
1. 0 ∈/ R, span(R) = V ed R é un insieme nito;
2. se α ∈ R, allora vale che kα ∈ R se e solo se k = ±1;
3. Sα (R) = R per ogni α ∈ R;
1
1. Sistemi di radici
<α,β>
4. 2 <α,α>
∈ Z per ogni α, β ∈ R.
<α,β>
, denotato n(α, β), é detto intero di Cartan.
L'intero 2 · <α,α>
Capitolo 2
Classicazione dei sistemi di
radici in dimesione 2
Si verica facilmente che, nel caso in cui V ∼
= R2 , gli interi di Cartan
devono essere concordi e il loro prodotto non deve superare 4; infatti:
n(α, β)n(β, α) = 2
hα, βi hβ, αi
kαkkβk cos φ kβkkαk cos φ
·2
=4
·
= 4 cos2 φ.
hα, αi
β, β
kαk2
kβk2
Quindi n(α, β)n(β, α) ≤ 4.
n(α, β) n(β, α)
0
1
-1
2
-2
3
-3
0
1
-1
1
-1
1
-1
φ
π
2
π
3
2π
3
π
4
3π
4
π
6
5π
6
kβk2
kαk2
tipo
A1 ⊕ A1
1
A2
1
A2
2
B2
2
B2
3
G2
3
G2
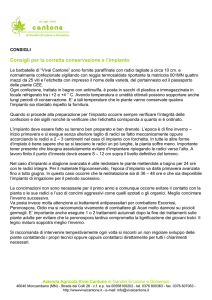
Esempio 2.1. Vediamo ora una rappresentazione nel piano cartesiano. Consideriamo il caso in cui il prodotto n(α, β)n(β, α) sia 3. Allora si ha:
√
3
4 cos φ = 3 ⇒ cos φ = ±
,
2
2
3
2. Classicazione dei sistemi di radici in dimesione 2
2 −3
=/6
−3
−2
−
−
−
−
−2
−3
2
3
−2 3
=5/6
2 3
−
−−3
−−2
−−
−
−2 −3
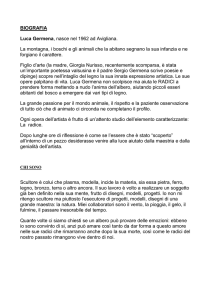
Figura 2.1: Radici ∼ G2 in R2
5
2. Classicazione dei sistemi di radici in dimesione 2
=2 /3
=/3
−
−
−
−
−−
−
=3 /4
−
=/4
2
−
−−2
−−
−2
−
−
−
−
−
−2
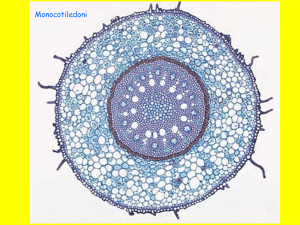
Figura 2.2: Sopra:Radici∼ A2 ; sotto: Radici∼ B2 in R2
2. Classicazione dei sistemi di radici in dimesione 2
così i due casi possibili per gli interi di Cartan sono:
n(α, β) = 3, n(β, α) = 1 oppure n(α.β) = −3, n(β, α) = −1,
corrispondenti rispettivamente agli angoli φ = π6 e φ = 5π6 (gli angoli negativi
si riconducono a quelli positivi per rotazione).
Esaminiamo le radici nel primo caso, trovando le riessioni rispetto agli iperpiani perpendicolari, riferendoci alla gura (2.1). Scelta un'unità di misura,
√
poniamo α = (1, 0). Di conseguenza, β = ( 32 , 23 ). Riettiamo β rispetto
all'iperpiano perpendicolare ad α (cioè l'asse y ). Si ha:
Sα (β) = β − n(α, β)α = β − 3α =
√ !
3 3
− ,
.
2 2
Riettiamo ora α rispetto all'iperpiano perpendicolare a β − 3α:
hβ, αi − 3hα, αi
(β − 3α) =
hβ − 3α, β − 3αi
!
!
√
√
3
−3
3 3
1 3
2
(1, 0) − 2
− ,
= − ,
= β − 2α.
3
2 2
2 2
Sβ−3α (α) = α − n(β − 3α, α)(β − 3α) = α − 2
Proseguendo nello stesso modo si trovano tutti i vettori del sistema di radici
R.
Inoltre vale:
Proposizione 2.1. Per ogni α, β ∈ R
hα, βi < 0 ⇒ α + β ∈ R,
hα, βi > 0 ⇒ α − β ∈ R.
In gura (2.1) si può notare che la linea passante per tutti i vertici dei
vettori β, β + α, β + 2α, β + 3α, raggruppa un insieme di radici positive che
dieriscono di α in modo crescente. Tale insieme si chiama α-stringa, ed
appare, in modo simile, in tutti i sistemi di radici.
Denizione 2.1. Sia S = {α1 , . . . , αl } tale che S ⊂ R; S si dice base se:
7
2. Classicazione dei sistemi di radici in dimesione 2
S é base di V ;
Per ogni β ∈ R, β =
Pl
i=1
ni αi , dove ni ∈ Z, ni ≥ 0 per ogni i oppure
ni ≤ 0 per ogni i.
Denizione 2.2. Sia γ ∈ V ; allora deniamo
R+ (γ) = {α ∈ R | hγ, αi > 0}
(2.1)
R− (γ) = {α ∈ R | hγ, αi < 0}.
(2.2)
Diciamo che γ é regolare se vale
R = R+ (γ) q R− (γ)
Osservazione 1. Vale R− (γ) = −R+ (γ).
Denizione 2.3. Sia α ∈ R+ (γ); allora α si dice decomponibile se si può
scrivere
α = β1 + β2
β1 , β2 ∈ R.
In caso contrario γ si dice indecomponibile.
Teorema 2.2. Ogni sistema di radici R ammette base.
Dimostrazione. Invece di dimostrare questo risultato, dimostriamo il prossimo teorema, che ci dice esplicitamente come trovare una base.
Teorema 2.3. Sia R un sistema di radici e sia ssato un elemento γ ∈ R
regolare. Allora l'insieme S(γ) dei vettori indecomponibili costituisce una
base per R.
Dimostrazione. Procediamo per passi successivi per dimostrare questo risultato.
Passo 1. Vogliamo dimostrare che
R+ (γ) = {α =
X
ni ∈Z+
0
ni αi , αi ∈ S(γ)}.
2. Classicazione dei sistemi di radici in dimesione 2
Per assurdo sia α ∈ R+ (γ) che non si scrive come nella 2.3; certamente α è
decomponibile, altrimenti α ∈ S(γ). Allora possiamo scrivere α = β1 + β2 ,
con β1 , β2 ∈ R+ (γ).
Scegliamo, tra tutti gli α ∈ R+ (γ) che non si scrivono come nella 2.3, quello
con hγ, αi minimo. Allora
hγ, αi = hγ, β1 i + hγ, β2 i > 0.
poiché β1 , β2 ∈ R+ (γ). Ora β1 e β2 non possono essere entrambi indecomponibili, altrimenti vale la 2.3. Diciamo, allora, che β1 é decomponibile.
sicuramente β1 non si puó scrivere come nella 2.3, ma vale anche che
hγ, αi > hγ, β1 i
che, per come abbiamo scelto α, è assurdo.
Passo 2. Vogliamo dimostrare che, se α, β ∈ S(γ) e α 6= β , allora hα, βi < 0.
Per assurdo, se fosse hα, βi > 0, allora α − β sarebbe radice. Allora avremmo che (α − β) ∈ R+ (γ) oppure (−α + β) ∈ R+ (γ); si vede facilmente che
avremmo in entrambi i casi che α o β sono decomponibili, che è assurdo.
Passo 3. Sia S(γ) = {α1 , . . . , αl } voglio dimostrara che α1 , . . . , αl sono liP
nearmente indipendenti, cioé che se ri αi = 0, allora ri = 0 per ogni i.
Scrivo
0=
X
ri αi =
X
si ≥0
Allora
P
si αi =
P
si αi −
X
tj αj .
tj ≥0
tj αj = ε, da cui
X
X
X
0 ≤ hε, εi = h
si αi ,
tj αj i =
si tj hαi , αj i = 0.
Quindi ε = 0 e gli si , tj sono tutti nulli. Passo 4. S(γ) genera R. É ovvio
perché sappiamo che R(γ) = R+ (γ) q (−R+ (γ)).
Capitolo 3
Matrici di Cartan e diagrammi di
Dynkin
Denizione 3.1. Una matrice A = (aij )1≤i,j≤l si dice matrice di Cartan se
soddisfa le seguenti proprietà:
1. aij ∈ Z per ogni i, j e inoltre aij ≤ 0 per ogni i 6= j , aii = 2 per ogni i;
2. aij = 0 se e solo se aji = 0;
3. det A 6= 0;
4. W = hsi : vj → vj − aij vi i è nito.
Osservazione 2. Se R è un sistema di radici, con S = {α1 , · · · , αl } base,
allora
A=
hαi , αj i
2
hαi , αi i
è una matrice di Cartan.
9
!
1≤i,j≤l
3. Matrici di Cartan e diagrammi di Dynkin
Si ha:
AA1 ×A1 =
2 0
0 2
!
, AA2 =
!
−1
2
−1
2
, AB2 =
2
−2
!
−1
2
, AG2 =
!
−1
.
−3 2
2
Si dimostra anche che, data A matrice di Cartan, esiste ed è unico a meno
di isometrie, un sistema di radici associato.
Ricaviamo un diagramma di Dynkin da ciascuna matrice di Cartan che
proviene da un sistema di radici:
1. Mettiamo l vertici (ciascuno con peso hαi , αi i: presa la radice più corta
αj , le si associa il peso 1, e le altre sono date dal rapporto tra le
kαi k
lunghezze kα
) P1 , · · · Pl ;
jk
2. Pi e Pj sono collegati da aij aji linee, con aij aji ∈ {0, 1, 2, 3}.
In particolare si ha:
AA1 ×A1
AA2
AB2
AG2
Denizione 3.2. Sia V uno spazio vettoriale e sia S = {α1 , . . . , αl } ⊆ V ;
allora S si dice schema se:
1. α1 , . . . , αl sono linearmente indipendenti;
i ,αj i
2. aij := 2 · hα
∈ Z−
aij aji ∈ {0, 1, 2, 3}.
0
hαi ,αi i
Vediamo ora in che modo é possibile associare ad ogni schema un diagrammma di Dynkin:
11
3. Matrici di Cartan e diagrammi di Dynkin
Teorema 3.1 (Cartan, 1894). I diagrammi di Dynkin connessi associati a
uno schema S sono
solo
i seguenti:
Al
···
Bl
···
Cl
···
Dl
···
G2
F4
E6
E7
E8
···
ttt
t
t
JJ
JJJ
Capitolo 4
Classicazione
Lemma 4.1.
1. Se uno schema S ha n elementi, allora il diagramma
associato non ha più di n-1 link.
2. Se S 0 ⊆ S , allora S 0 è uno schema.
Lemma 4.2.
1. S non contiene cicli.
2. Se S 0 ⊆ S , S 0 connesso e β ∈ S \ S 0 , allora β non può essere collegato
a più di un elemento di S 0 .
3. Da ogni vertice escono al massimo 3 linee.
4. Se ho una catena semplice (una sola linea per ogni link), tutti gli αi
hanno la stessa lunghezza.
5. Sia C una catena semplice C = {α1 , . . . , αr } e sia α = α1 + . . . + αr .
Allora (S \ C) ∪ α è ancora uno schema.
Lemma 4.3. Se C è una catena con un link doppio, con p elementi a sinistra
del link e q elementi a destra, allora min(p, q) = 1 oppure p = q = 2.
Lemma 4.4. Se ho un triplo vertice, cioè un elemento da cui partono tre link,
e p, q, r sono i numeri degli elementi nelle tre direzioni, allora vale q = r = 2
oppure r = 2, q = 3, 3 ≤ p ≤ 5. Allora min(p, q) = 1 oppure p = q = 2.
12
Capitolo 5
Algebre di Lie semisemplici
Denizione 5.1. Un algebra di Lie g è uno spazio vettoriale su un campo
K (con char K 6= 2, 3) dotato di un operazione binaria
[, ] : g × g → g
(5.1)
che soddisfa le seguenti proprietà:
(i) è bilineare;
(ii) è antisimmetrica;
(iii) soddisfa l'identità di Jacobi, cioé [X, [Y, Z]]+[Y, [Z, X]]+[Z, [X, Y ]] = 0.
Una rappresentazione di g su uno spazio vettoriale V è un'applicazione ρ :
g → End(V ) tale che
(i) è lineare;
(ii) ρ([X, Y ]) = ρ(X)ρ(Y ) − ρ(Y )ρ(X).
Osservazione 3. In generale, se A è uno spazio vettoriale e un anello, cioè
un'algebra associativa, si può denire [X, Y ] := XY − Y X ; si vede subito
13
5. Algebre di Lie semisemplici
che, cosí denita, l'operazione è binaria, antisimmetrica e soddisfa l'identità
di Jacobi.
Esempio 5.1. Un esempio particolarmente importante di rappresentazione
di un'algebra di Lie g è quelle che viene chiamata rappresentazione aggiunta,
denita come
ad : g → End(g)
X → (Y → [X, Y ])
(5.2)
(5.3)
Denizione 5.2. Un algebra di Lie g si dice semplice se non è abeliana e
gli unici ideali sono g e (0).
Si dice semisemplice se è somma diretta di algebre semplici.
Capitolo 6
Sistemi di radici associati ad
algebre semisemplici
Denizione 6.1. Sia g un'algebra semisemplice e h ⊆ g un sottospazio
vettoriale. Si dice che hè una sottoalgebra di Cartan (CSA) se:
(i) h è massimale e abeliana, cioé [X, Y ] = 0 ∀ X, Y ∈ h ed è la più grande
con questa proprietà;
(ii) ad(H) è semisemplice, cioè diagonalizzabile, per ogni H ∈ h.
Denizione 6.2. Sia g un'algebra di Lie semisemplice, h ⊆ g una CSA e h∗
il duale di h. Allora λ ∈ h∗ r {0} si dice radice se vale
gλ := {X ∈ g | [H, X] = λ(H)X ∀ H ∈ h} =
6 0.
Lo spazio gλ è detto spazio radice ; denotiamo inoltre con ∆ l'insieme di tutte
le radici, detto sistema di radici.
Teorema 6.1. Sia g un algebra semisemplice e sia h una CSA. Allora:
(a) span{∆} = h∗ ;
15
6. Sistemi di radici associati ad algebre semisemplici
(b) se α ∈ ∆, allora −α ∈ ∆ ;
(c) se x ∈ gα , y ∈ g−α , allora [x, y] = hx, yiHα0 ;
(d) [gα , g−α ] = span{Hα0 };
(e) α(Hα0 ) = hHα0 , Hα0 i =
6 0;
(f) se x ∈ gα , esiste y ∈ g−α tale che, se poniamo Hα := [x, y], vale
2H 0
span{Hα , x, y} ∼
= sl2 (C) e Hα = hHα0 ,Hα α0 i , cioè per ogni α ∈ ∆ c'è una
copia di sl2 (C) ⊆ g.
Dimostrazione. Vedi Humphreys pag. 37.
Teorema 6.2. Suuponiamo valgano le stesse ipotesi del teorema 6.1. Allora
valgono:
(a) α ∈ ∆ ⇒ dim gα = 1;
(b) α ∈ ∆, kα ∈ ∆ ⇒ k = ±1;
(c) α, β ∈ ∆ ⇒ β(Hα ) ∈ Z,
β − β(Hα )α ∈ ∆;
(d) [gα , g−β ] = gα+β ;
(e) α, β ∈ ∆ ⇒ ∃p, q, p ≤ r ≤ q, tali che β + rα ∈ ∆. (Si tratta della
α-stringa, p, q potrebbero anche essere entrambi zero).
A questo punto siamo in grado di aermare che, presa un' algebra di Lie,
ssata una CSA, le radici trovate formano eettivamente un sistema di radici
nel senso della denizione (1.2). Infatti:
Il punto (a) del teorema (6.1) equivale al punto 1. della denizione generale;
(b) in (6.2) equivale al punto 2., la seconda aermazione di (c) in (6.2)
equivale al punto 3. e la prima al punto 4..