Linee di Trasmissione:
Propagazione per onde
v+(z)
Rappresentazione schematica
di una linea di trasmissione
z
Definizione matematica dell’onda di tensione che si propaga verso la z
crescente:
v ( z ) (V0 e j 0 t ) e z
L’onda é un fasore (cioé un vettore rotante) sia nel tempo (termine
tra parentesi) che lungo la direzione z (secondo termine).
-1-
Significato della costante di
propagazione
Posto +j, si ha:
v ( z ) V0 e j t e z e j z
Costante di attenuazione Indica la rapiditá con cui si riduce
l’ampiezza dell’onda che si propaga. Si misura in Neper/m o in
dB/m (1Np = 8.686 dB)
Costante di fase Indica la rapiditá con cui cambia la fase
lungo la coordinata z (per t=cost). E’ legata alla lunghezza
d’onda e alla pulsazione dalla relazione
rappresenta la velocitá di propagazione che dipende dal mezzo
che riempe la linea). si misura in rad/sec.
-2-
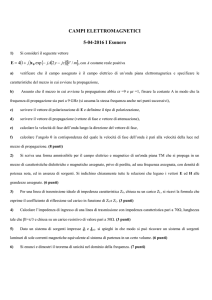
Parametri primari della linea
Sezione z
L z
R z
C z
G z
Gli elementi R, L, C, G, sono detti parametri primari della linea di
trasmissione. Dipendono dalla struttura fisica della linea e dal mezzo che la
riempe.
Utilizzando i parametri primari si possono ricavare le equazioni che
governano la propagazione sulla linea (si impongono le equazioni di Kircoff
alla maglia e al nodo sul tratto di lunghezza infinitesima e si integra)
-3-
Parametri secondari
Impedenza Caratteristica (Zc): é l’impedenza che si vede all’ingresso di
una linea di lunghezza infinita (é presente solo l’onda che si propaga
verso le z crescenti)
Costante propagazione j
Formule di calcolo in funzione dei parametri primari:
Zc
L
,
C
1R 1
G Zc ,
2 Zc 2
LC
Queste relazioni sono valide per >> R/L, G/C; tali condizioni sono in pratica
sempre verificate se la frequenza operativa è superiore a qualche decina di
MHz.
-4-
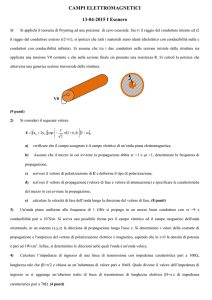
Tensioni e correnti sulla linea
I(z)
V(z)
v+(z)
v-(z)
ZL
V ( z) v ( z) v ( z) V0+e j z V0-e j z
V0+ j z V0- j z
I ( z) i ( z) i ( z) e e
Zc
Zc
z
v+, i+: Onde Incidenti
v-, i-: Onde Riflesse
L’onda riflessa di tensione ha lo stesso segno dell’onda incidente; l’onda
riflessa di corrente ha segno opposto rispetto a quella incidente. Entrambe
sono legate tramite l’impedenza caratteristica della linea
Le onde riflesse si generano quando si introduce una disuniformitá nella
struttura fisica della linea (nel caso rappresentato é il carico). Per annullare
l’onda riflessa bisogna che ZL sia uguale a ZC.
-5-
Coefficiente di riflessione
Onda Riflessa V0 e j z V0 j 2 z
( z )
j z e
0e j 2 z
Onda Incidente V0 e
V0
Propietá di (z):
Il modulo non dipende da z (é costante lungo la linea)
La fase presenta, al variare di z, una periodicitá di /2
Il modulo é sempre minore di 1 quando il carico é passivo (la potenza
riflessa non puó superare quella incidente).
-6-
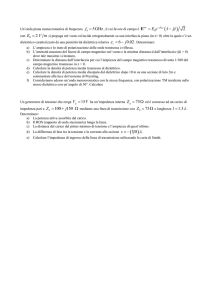
Andamento del |V(z)|
V (z) v (z) v (z) v (z) 1 (z)
Vmax
|V|
V ( z ) V 0+ 1 0 e
Vmin
V 0+
Vmin
z
j2 z
1 2 0 cos(2 z) 0
2
1
2
La tensione presenta un andamento periodico (stesso periodo di ) con
massimi e minimi che valgono rispettivamente:
V m ax 1
,
V m in 1
Si definisce Rapporto d’onda stazionaria (ROS) il rapporto tra queste
due tensioni:
ROS
V m ax
V m in
-7-
Impedenza lungo la linea
I(z)
Z(z)
V(z)
ZL
1 ( z)
V (z)
Z (z)
Zc
1 ( z)
I (z)
z
Esiste una corrispondenza biunivoca tra il valore del coefficiente di
riflessione e l’impedenza vista in ogni sezione della linea (normalizzata
all’impedenza caratteristica)
OSSERVARE: L’impedenza é quella vista verso il carico!
Relazione inversa:
Z (z) Zc
(z)
Z (z) Zc
-8-
Impedenza di un tratto di linea
chiuso su una ZL generica
I(z)
V(z)
Zc ,
Vin
Z L jZ c tan( L )
Zin
Zc
Z c jZ L tan( L )
I in
ZL
L
Casi particolari:
ZL= 0 (corto circuito)
Z in
Vin
L
jZ c tan( L ) jZ c tan(2 )
I in
0
ZL= (circuito aperto)
Z in
Vin
L
jZ c cot( L ) jZ c cot(2 )
0
I in
-9-
Rappresentazione grafica di
é un numero complesso che puó
essere rappresentato sul piano x, y in
forma polare
•
1
Se il numero complesso rappresenta
il coefficiente di riflessione su una
linea di trasmissione , il punto su piano
é sempre all’interno del cerchio a
raggio unitario
-1
1
-1
- 10 -
Rappresentazione grafica di
Il coefficiente di riflessione su una linea
di trasmissione priva di perdite
si
rappresenta sul piano come un cerchio di
raggio pari al ||. La fase varia di 360°
per uno spostamento di /2 sulla linea
d
c
Punti caratteristici:
Linea adattata =0 ( centro della carta)
Circuito Aperto =1 (a)
Corto circuito =-1 (d)
Massimo di tensione sulla linea (b) ( reale e positivo)
Minimo di tensione sulla linea (c) ( reale e negativo)
- 11 -
b
a
Carta di Smith
Sul piano di rappresentazione di si possono tracciare le curve che
rappresentano il luogo dei punti in cui la parte reale (o la parte
immaginaria) di zn=Z/Zc rimane costante:
( z) 1
ReZin Re
cost (r)
( z) 1
( z) 1
ImZin Im
cost ( x)
( z) 1
Queste curve sono dei cerchi, il cui raggio e centro dipendono dal
valore di r o x. La Carta di Smith é la rappresentazione grafica di
tali cerchi, che consente di risolvere, per via grafica, molti problemi
relativi all’impiego di linee di trasmissione nei circuiti a microonde.
- 12 -
Cerchio a x = 1
Verso il carico
Verso il generatore
Angolo di (si misura in gradi
o in L/
Cerchio a r = 1
Asse di riferimento
Rappresentazione delle ammettenze
sulla Carta di Smith
Impedenza nel punto : zn
1
1
’
Impedenza nel punto ’:
j
1 e j 1 1
1 1 e
zn
j
j
1 1 e
1 e
1 zn
Il punto diametralmente opposto presenta l’inverso dell’impedenza
del punto originale, cioè la sua ammettenza. La carta di Smith può
rappresentare indifferentemente Z o Y
- 14 -
Carta di Smith
Spostamenti a Γ costante
ZL
0
0
Asse d
L
x
d
x e j 2 x e j0 e j 4 x
0
0
j 4 d
j L
j 2 d
d L e
L e
e
Spostamenti su linee senza perdite
0
Asse x
Spostamenti su cerchi a Γ costante
(circonferenze centrate nell’origine)
Spostamenti
verso il carico spostamenti lungo x crescente
x 0 2 x Rotazione antioraria
dal carico spostamenti lungo x crescente
x L 2 d Rotazione oraria
NOTA: Γ (z) è una funzione periodica della distanza con periodo λ/2
- 15 -
Carta di Smith
Spostamenti a r o x Costanti
Spostamento a x costante
xL
r
ΓL
zL = rL + jxL
Γin
rL
zin = (rL + r) + jxL
rin = r+rL
Spostamento a r costante
xL
jx
ΓL
zL = rL + jxL
rL
zin = rL + j(xL + x)
- 16 -
Γin
xin = xL + x
Carta di Smith
Spostamenti a g o b Costanti
Carta delle Z
Spostamenti a b costante
g
yL = gL + jbL
yin = (gL + g) + jbL
yL = gL + jbL
yin = gL + j(bL + b)
ΓL
Γin
Γin
ΓI,in
gin =gL + g
bL ΓI,L
gL
Spostamenti a g costante
jb
gL
ΓL
Carta delle Y
bL
ΓL
ΓL
bL
ΓI,in
Γin
bL ΓI,L
- 17 -
gL
Γin
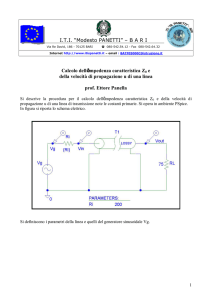
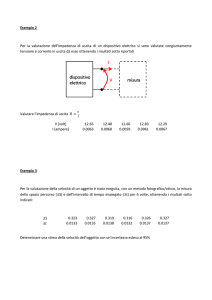
Carta di Smith
Esempio di Soluzione grafica
in
jX A
d
B
Zc
α=0
L
jB
ZL
Z L Zc
0.6259.0
Z L Zc
Zc= 50 [Ω];
B= 0.05 [Ω-1]; (bn=2.5)
εr = [4];
X = -80 [Ω]; (xn=-1.6)
f0 = 3 [GHz];
d = 15 [mm]; (d=108°)
ZL= 20 + j40 [Ω];
xin
(Zn=0.4+j0.8)
=7.2 [°/mm]
ΓL
Γin ΓA
B 0.75 116.6
2βL
2 d 40d 3.77 rad 216.0
ΓB
A 0.7527.4
in 0.5131.1 Z in Z c
1 in
96 j 68 Ω
1 in
- 18 -
bB