Amplificatori operazionali
Parte 3
www.die.ing.unibo.it/pers/mastri/didattica.htm
(versione del 9-5-2012)
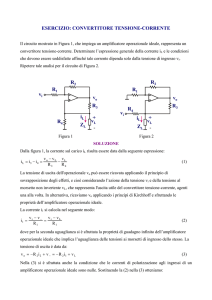
Configurazione invertente generalizzata
● Se nella configurazione invertente si sostituiscono le resistenze R1 e R2
con due impedenze Z1(s) e Z2(s) si ottiene un circuito avente funzione di
trasferimento
H( s )
Vo ( s )
Z (s)
2
Vi ( s )
Z1 ( s )
● Per s j, da questa espressione si ricava la funzione di trasferimento
per frequenze reali
2
Integratore
● Si pone
Z1 ( s ) R
Z2 (s)
1
sC
● La funzione di trasferimento è
H( s )
Z2 (s)
1
Z1 ( s )
sRC
● Quindi la risposta nello stato zero (cioè per vC0 0) è
1
1
v0 (t ) L
Vi ( s )
vi ( x)dx
RC 0
sRC
t
1
L’uscita è proporzionale all’integrale dell’ingresso
● RC = costante di tempo dell’integratore
3
Integratore
● Lo stesso risultato può essere ottenuto anche analizzando il circuito nel
dominio del tempo
● Dato che l’ingresso invertente
è virtualmente a massa si ha
iR (t )
vi (t )
R
● Inoltre
iC (t ) iR (t )
● Quindi
t
t
1
1
vo (t ) vC (t ) vC (0) iC ( x) dx vC (0)
vi ( x) dx
C0
RC 0
4
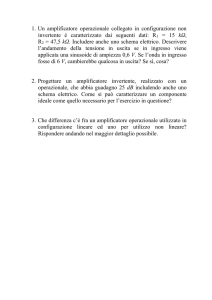
Integratore – Risposta in frequenza
● La risposta in frequenza si ottiene
ponendo s j
s j H( j)
1
jRC
H (dB)
20 dB / decade
● Quindi si ha
H( j)
1
RC
argH( j) 90
0 dB
1
RC
● Il modulo della funzione di trasferimento vale 1 (guadagno = 0 dB) per
1(RC)
5
Integratore – Risposta in frequenza
● Per tendente a 0 il guadagno tende a infinito
Il condensatore tende a comportarsi come un circuito aperto
il comportamento dell’integratore tende a quello dell’amplificatore
operazionale non retroazionato
● L’integratore risulta particolarmente sensibile ai disturbi a bassa
frequenza
● Una componente continua del segnale di ingresso idealmente
produrrebbe una tensione di uscita infinita
In pratica l’amplificatore operazionale viene portato in saturazione
● Lo stesso effetto può essere prodotto dalla tensione di offset e dalle
correnti di polarizzazione di ingresso
6
Limitazione del guadagno a bassa frequenza
● I problemi relativi al comportamento a bassa frequenza possono essere
ridotti collegando un resistore in parallelo al condensatore
● Il comportamento del circuito, però, si discosta da quello dell’integratore
ideale (in misura maggiore al diminuire di R2)
● In questo caso si ha
Z 2 (s)
1
1
sC
R2
R2
1 sR2C
● Quindi la funzione di trasferimento è
H( s )
Z 2 (s)
R /R
2 1
Z1 ( s )
1 sR2C
7
Limitazione del guadagno a bassa frequenza
● Con l’inserimento di R2 il polo della funzione di trasferimento si sposta
da s 0 a s 1/(R2C)
● Per s j si ottiene
H( j)
Vo
R2 / R1
Vi
1 jR2C
In continua il guadagno è finito e vale R2R1
Per 1(R2C) si ha
H( j)
R2 / R1
1
jR2C
jR1C
e quindi il comportamento del circuito è simile a quello di un
integratore ideale
8
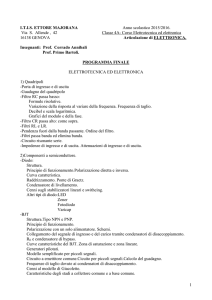
Limitazione del guadagno a bassa frequenza
R
20 log10 2
R1
H (dB)
20 dB / decade
arg(H)
180
90
1
R2C
9
Derivatore
● In questo caso le impedenze sono
Z1 ( s )
1
sC
Z2 (s) R
● Quindi si ottiene la funzione di
trasferimento
H( s )
Z2 (s)
sRC
Z1 ( s )
● La risposta nello stato zero è
v0 (t ) L 1 sRC Vi ( s ) RC
dvi
dt
● L’uscita è proporzionale alla derivata dell’ingresso
● RC = costante di tempo del derivatore
10
Derivatore
● La risposta può essere valutata anche analizzando il circuito nel
dominio del tempo
iR (t ) iC (t ) C
vo (t ) RC
dvi
dt
dvi
dt
11
Derivatore - Risposta in frequenza
● La risposta in frequenza si ottiene
ponendo s j
s j H( j) jRC
H (dB)
20 dB / decade
● Quindi si ha
H( j) RC
argH( j) 90
0 dB
1
RC
● Il modulo della funzione di trasferimento vale 1 (guadagno = 0 dB) per
1(RC)
12
Limitazione del guadagno ad alta frequenza
● Il derivatore risulta molto sensibile ai disturbi ad alta frequenza
Rapide variazioni del segnale di ingresso (dovute per esempio a
rumore) possono produrre dei picchi di ampiezza elevata in uscita
Inoltre i derivatori tendono ad avere problemi di stabilità
● Questi problemi possono essere ridotti collegando un resistore in serie
al condensatore
Il comportamento del circuito, però, si discosta da quello del
derivatore ideale (in misura maggiore all’aumentare di R1)
● In questo caso si ha
Z 2 ( s ) R1
H( s )
1
sC
Z2 (s)
sR2C
Z1 ( s )
1 sR1C
13
Limitazione del guadagno ad alta frequenza
● L’inserimento di R1 introduce nella funzione di trasferimento un polo per
s 1/(R1C)
● Per s j si ottiene
H( j)
jR2C
1 jR1C
Ad alta frequenza, cioè per maggiore della pulsazione di taglio
1/(R1C), il guadagno vale R2R1
Per 1(R1C) si ha
H( j) jR2C
e quindi il comportamento del circuito è simile a quello di un
derivatore ideale
14
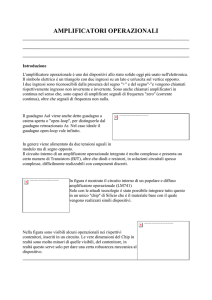
Limitazione del guadagno ad alta frequenza
R
20 log10 2
R1
H (dB)
20 dB / decade
arg(H)
90
180
1
R1C
15
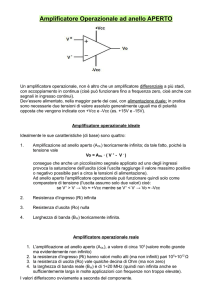
Risposta in frequenza
di un amplificatore operazionale
● La dipendenza del guadagno ad anello aperto di un amplificatore
operazionale dalla frequenza può essere rappresentata dalla relazione
A( j)
A0
1 j
0
Modello a un polo
A0 = guadagno ad anello aperto in continua
0 = pulsazione dei taglio
f0 0(2) = frequenza di taglio
Il guadagno diminuisce con pendenza -20 dB/decade (-6 dB/ottava) a
partire da una frequenza f0 relativamente bassa
Valori tipici di f0 sono dell’ordine di 10 Hz
● Questo comportamento viene imposto inserendo nell’amplificatore
operazionale un condensatore di valore relativamente elevato
(compensazione in frequenza) e ha lo scopo di garantire che
l’amplificatore sia stabile quando viene collegato in retroazione
16
Risposta in frequenza
di un amplificatore operazionale
20 dB / decade
17
Risposta in frequenza
di un amplificatore operazionale
● In un amplificatore operazionale reale sono presenti numerosi effetti
reattivi parassiti
● La funzione di trasferimento ha un numero elevato di poli
● I poli dovuti agli effetti parassiti sono posti a frequenze molto maggiori di
f0 (in genere il secondo polo corrisponde ad una frequenza maggiore di
1 MHz)
● Per frequenze inferiori a quella a cui interviene il secondo polo, il
comportamento dinamico dell’amplificatore operazionale è determinato
dal primo polo (polo dominante)
18
Banda di guadagno unitario
● La frequenza fUG per cui il guadagno risulta uguale a 1 definisce la
banda di guadagno unitario dell’amplificatore operazionale
● Dato che fUG >> f0, si ha
A( j 2 f UG )
A0
1 f UG A0 f 0
f UG /f 0
● Inoltre, per fUG >> f0 il guadagno può essere espresso dalla relazione
approssimata
A( j 2 f)
A0 f UG
f/f 0
f
● Nota: questi risultati valgono se alla frequenza fUG l’amplificatore
operazionale (come avviene normalmente) può essere rappresentato
mediante il modello a un polo (cioè se gli altri poli sono a frequenze
maggiori di fUG)
19
Prodotto guadagno – larghezza di banda
● Si considera il comportamento
dell’amplificatore operazionale
in presenza di retroazione negativa
● Si assume che la rete di retroazione
sia resistiva
● Il guadagno ad anello chiuso è
Af ( j)
A0 / 1 j / 0
A0
Vo
A( j)
Vi 1 A( j) 1 A0 / 1 j / 0 1 j / 0 A0
A0 f
1 j
dove
A0 f
A0
1 A0
0 (1 A0)
A0 f
1 j
0 f
0 f 0 (1 A0)
20
Prodotto guadagno – larghezza di banda
● Complessivamente si ottiene
una riduzione del guadagno in continua di un fattore pari al tasso di
retroazione
A0 f
A0
1 A0
un aumento della frequenza di taglio (cioè un aumento della
larghezza di banda) dello stesso fattore
0 f 0 (1 A0)
● Il prodotto guadagno – larghezza di banda (GBW) non cambia
GBW A0 f 0 A0 f f 0 f
● Inoltre (se alla frequenza di guadagno unitario vale il modello a un polo)
si ha anche
GBW f UG
21
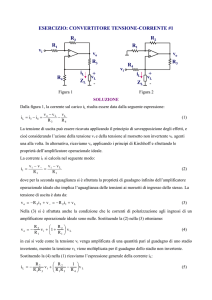
Prodotto guadagno – larghezza di banda
Guadagno (dB)
20 log10 ( Ao )
20 log10 1 Ao
20 dB / decade
A
Af
20 log10 ( A0 f )
f0
f0f
log10 1 Ao
f
22
Amplificatore invertente e non invertente
● Sia nella configurazione invertente sia in quella non invertente risulta
R1
R1 R2
● Per A 1 il guadagno in continua ad anello chiuso è
A0 f
1
R
1 2
R1
(A0f coincide con il guadagno dell’amplificatore solo nella configurazione
non invertente)
● Quindi in entrambi i casi la larghezza di banda fb dell’amplificatore è
data dalla relazione
f b f0f
GBW
GBW
GBW
R
A0 f
1 2
R1
23
Esempio
A0 105 GBW 1 MHz
Amplificatore non invertente
AV
fb
Amplificatore invertente
AV
fb
1
1
1 MHz
1
0.5
500 kHz
10
0.1
100 kHz
10
0.0909
90.9 kHz
100
0.01
10 kHz
100
0.0099
9.9 kHz
1000
0.001
1 kHz
1000 0.000999
999 Hz
24
Slew-rate
● In un amplificatore operazionale reale la velocità di variazione della
tensione di uscita non può superare un valore limite detto slew-rate
(velocità di risposta)
dv
SR max o
dt
● I valori tipici sono dell’ordine dei V/s
● Questa limitazione è dovuta a fenomeni non lineari (saturazione dello
stadio di ingresso dell’amplificatore operazionale) e non è in relazione
con la larghezza di banda finita dell’amplificatore operazionale
25
Esempio
● Si considera un inseguitore di tensione ( = 1)
● La funzione di trasferimento è
Vo ( s )
1
Vi ( s ) 1 s
UG
● Si assume che l’ingresso sia un gradino
di ampiezza V
vi (t ) V u(t )
La risposta, nel caso ideale, è
V
V
V
UG t
vo (t ) L 1 UG L 1
u(t )
V 1 e
s s UG
s UG s
26
Esempio
● Il valore massimo della derivata della tensione di uscita si ha per t 0
ed è UGV
● Per valori di V tali che UGV SR la tensione di uscita tende con legge
esponenziale al valore V
● Valori più elevati di V nel caso ideale comporterebbero valori della
derivata di vo maggiori di SR
Nel tratto iniziale la tensione di uscita aumenta con la massima velocità
possibile, quindi cresce linearmente con pendenza SR
27
Esempio
Pendenza = SR
Andamento
ideale
V
28
Larghezza di banda a piena potenza
● Per una tensione sinusoidale v(t) = VMcos(t) il valore massimo della
derivata è
dv
max VM
dt
● Si considera una tensione di uscita sinusoidale con ampiezza pari al
valore della tensione di saturazione Vsat
● Il valore massimo della frequenza per cui l’uscita non è distorta, fM,
deve soddisfare la condizione
2 f M Vsat SR f M
SR
2Vsat
● La frequenza fM definisce la larghezza di banda a piena potenza
● Per valori maggiori di frequenza, l’ampiezza massima VoM per cui
l’uscita risulta indistorta è minore
2 f VoM 2 f M Vsat SR VoM Vsat
fM
f
29
Esempio
Andamento ideale
Andamento
in presenza
di limitazione
di slew-rate
30