DIPARTIMENTO DI MATEMATICA Via E. Orabona, 4 70125 Bari Materiale didattico per gli studenti del Corso di Laurea Magistrale in Matematica.
Teoria economica della produzione e dei costi.
(a cura del prof. Mario C. Sportelli)
(ottobre 2009)
2 §1 – La funzione di produzione monoprodotto.
Definizione 1.1 – Dicesi piano di produzione (o insieme di produzione) l’insieme degli output netti Y di beni o servizi.
Formalmente l’insieme di produzione si denota con il vettore
Y = ( y1 , y2 , ..., yn ) ∈ R n
Gli output netti sono le diverse quantità di bene ottenute attraverso un processo di produzione. Il processo di produzione è irreversibile.
Definizione 1.2 – Dicesi tecnologia l’insieme delle conoscenze tecniche applicate ad
un processo produttivo.
Definizione 1.3 – Si dicono input quei beni o servizi utilizzati in un processo di produzione.
Gli input, trasformati attraverso il processo di produzione, generano l’output.
Definizione 1.4 – Dicesi tecnica di produzione ogni combinazione di input diversi.
Formalmente una tecnica di produzione si denota con il vettore
x = ( x1 , x2 ,..., xk ) ∈ R k
Gli input non sono liberamente disponibili (devono essere acquistati). L’impresa, pertanto, è
interessata solo alla frontiera dell’insieme di produzione.
Sia X l’insieme delle tecniche di produzione disponibili data la tecnologia.
Definizione 1.5 – Dicesi funzione di produzione l’applicazione
f :X→Y
che ad ogni x ∈ X associa un solo y ∈ Y e tale che y sia sulla frontiera di Y.
In maniera alternativa si dice che la funzione di produzione è la relazione tecnica tra la massima quantità di output e le diverse combinazioni di input.
L’operatore funzionale f sintetizza la tecnologia.
Assumeremo qui che la tecnologia sia data e invariante (assenza di progresso tecnico).
Una tecnica di produzione è “tecnicamente efficiente” se utilizzata per produrre la quantità
massima di output consentita dalla tecnologia.
Per semplicità, assumeremo continua e derivabile la funzione di produzione. Una tale funzione si dice caratterizzata da “coefficienti flessibili”.
Sia y = f (x ) una funzione di produzione. Per la tecnologia f valgono i seguenti postulati:
1) Monotonicità – Se x ≥ x’, allora f (x ) ≥ f (x′) .
∀x, x′ ∈ X ′ f ( x ) = f ( x′) ⎫
2) Convessità ⎬ : z = α x + (1 − α )x′ ⇒ f ( z ) ≥ f ( x ) = f ( x′) .
∀α ∈ [ 0, 1]
⎭
3 Definizione1.6 – Dicesi produttività marginale del fattore xi il tasso al quale varia
l’output al variare della quantità utilizzata del solo fattore i-esimo:
∂y
= fi > 0 .
MPi =
∂xi
La produttività marginale di un fattore è sempre positiva per il primo postulato della tecnologia.
Osservazione 1.1 – Dal punto di vista dell’impresa è importante misurare i rendimenti
del fattore, ossia le variazioni che la produttività marginale subisce in conseguenza di successive variazioni della quantità utilizzata del fattore.
I rendimenti di un fattore produttivo sono misurati dalla derivata
∂MPi
∂ ⎛ ∂y ⎞ ∂ 2 y
=
= f ii
⎜
⎟=
∂xi
∂xi ⎝ ∂xi ⎠ ∂xi2
Dal segno di tale derivata deduciamo che:
a) I rendimenti del fattore sono crescenti se f ii > 0 , ossia se l’output cresce a tassi crescenti al crescere dell’input xi.
b) I rendimenti del fattore sono costanti se f ii = 0 , ossia se l’output cresce proporzionalmente al crescere dell’input xi.
c) I rendimenti del fattore sono decrescenti se f ii < 0 , ossia se l’output cresce a tassi decrescenti al crescere dell’input xi.
La produttività marginale di un fattore può variare anche in conseguenza delle variazioni di
un altro fattore. Tale variazione è sempre non negativa, ossia,
∂MPi
∂2 y
=
= f ij ≥ 0 .
∂x j
∂xi ∂x j
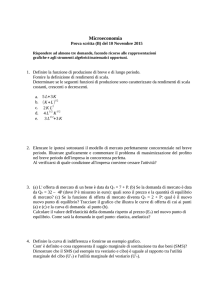
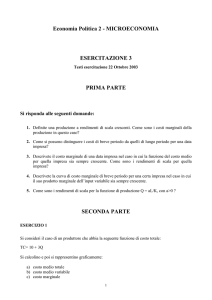
Quando la produttività marginale di xi è caratterizzata da
tutti e tre i tipi di rendimenti, la funzione di produttività
totale 1 relativa a tale fattore assume la forma illustrata nel
grafico in alto della fig. 1. Nel tratto in cui la curva è
convessa, i rendimenti di xi sono crescenti. Divengono
decrescenti nel tratto in cui la curva è concava. I rendimenti costanti sono, in tal caso, ridotti al solo punto di
flesso.
Definizione 1.7 – Dicesi produttività media del
fattore xi il rapporto tra l’output totale e la quantità utilizf (x)
zata d xi: APi =
xi
Per capire come varia la produttività media al variare della quantità utilizzata del fattore xi, calcoliamo:
1
Tale funzione si deduce da f(x), assumendo costanti tutti gli xj ≠ xi.
4 ∂APi xi f i − f ( x ) 1 ⎛
f (x) ⎞
=
= ⎜ fi −
⎟.
2
∂xi
xi
xi ⎝
xi ⎠
Poiché f i = MPi e f (x ) xi = APi , possiamo facilmente capire che: ( ∂APi ∂xi > 0 ) la produt-
tività media è crescente finché la produttività marginale è maggiore della produttività media;
( ∂APi ∂xi < 0) la produttività media è decrescente quando la produttività marginale è minore
della produttività media. Si veda il grafico in basso della fig.1.
Proposizione 1.1 – Quando ∂APi ∂xi = 0 , la produttività media raggiunge il suo punto
di massimo relativo.
∂APi
f (x)
Dimostrazione – La condizione necessaria per il massimo richiede che
= 0 ⇒ fi =
∂xi
xi
ossia MPi = APi. La condizione sufficiente richiede, invece, che ∂ 2 APi ∂xi2 < 0 nel punto che
annulla la derivata prima. Poiché
∂ 2 APi
1 ⎛
f (x) ⎞ 1 ⎛
xi f i − f ( x ) ⎞
= − 2 ⎜ fi −
⎟,
⎟ + ⎜ f ii −
2
∂xi
xi ⎝
xi ⎠ xi ⎝
xi2
⎠
∂ 2 APi 1
= ( f ii ) < 0 se la produttività marginale è de∂xi2
xi
crescente, ossia se f ii < 0 . Ciò implica che la curva del prodotto marginale taglia dall’alto la
curva del prodotto medio.
nel punto in cui ∂APi ∂xi = 0 , risulta
•
Osservazione 1.2 – Normalmente si assume che l’impresa operi sempre nella zona in
cui i rendimenti dei fattori sono costanti o decrescenti. La zona in cui i rendimenti sono crescenti non garantisce, di regola, livelli significativi di produzione.
Definizione 1.8 – Data una funzione di produzione, dicesi isoquanto l’insieme delle
tecniche alle quali si associa un medesimo livello di output:
Q ( y ) = {x ∈ X : y = f ( x )} .
Osservazione 1.3 – Per il secondo postulato della tecnologia, l’isoquanto è una funzione convessa. Ciò significa che f ( z) come definito in precedenza appartiene al contorno
superiore dell’isoquanto y = f (x ) = f (x′) .
Osservazione 1.4 – L’isoquanto non è mai un insieme vuoto. Esso include almeno un
elemento, ossia una tecnica di produzione. Ciò accade nel caso estremo in cui la tecnologia,
caratterizzata da coefficienti fissi, implica un unico livello di produzione per ciascuna tecnica.
Osservazione 1.5 – Quando la funzione di produzione è a coefficienti flessibili (funzione continua), l’isoquanto è sempre una funzione continua, convessa e derivabile.
Definizione 1.9 – Dicesi “Saggio marginale tecnico di sostituzione” (TRS) il tasso al
quale l’utilizzo di un fattore deve variare al variare della quantità utilizzata di un altro fattore,
affinché il livello di produzione resti costante.
5 k
Per determinare TRS fra due fattori qualunque, differenziamo l’isoquanto: d y = ∑ f i dxi = 0 .
i =1
Assumendo variabili soltanto i fattori xi e xj, la precedente diviene d y = f i dxi + f j dx j = 0 , da
cui
dx j
dxi
= TRS = −
fi
MPi
=−
< 0 , essendo le produttività marginali positive.
fj
MPj
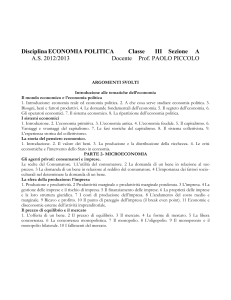
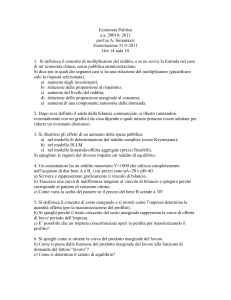
Osservazione 1.6 – Se x ∈ R 2 , l’isoquanto è una curva convessa e decrescente e TRS
è decrescente in valore assoluto. Si veda la fig. 2.
Definizione 1.10 – Si definiscono rendimenti di scala le variazioni dell’output derivanti da variazioni della scala di produzione.
I rendimenti di scala misurano la reattività dell’output a variazioni equiproporzionali di tutti
gli input. Quando gli input variano tutti nella stessa proporzione, si dice che è variata la scala
di produzione. Per determinare i rendimenti di scala, fissiamo una tecnica di produzione x ,
cosicché y = f ( x ) . Se gli input variano tutti nella stessa proporzione, le nuove tecniche di
produzione sono determinabili moltiplicando il vettore x per uno scalare s ≷ 1 definito “parametro di scala”. Al variare di s, i successivi livelli di output sono determinati come
y = f ( sx ) . Calcoliamo, quindi, il rapporto tra la variazione relativa o percentuale dell’output
e la variazione relativa o percentuale del parametro di scala. Tale rapporto si definisce “elasticità di produzione” e si indica con Ep:
Δy % Δy Δs Δy s
Ep =
=
:
=
.
Δs %
y s
Δs y
dy s
. Poiché Ep (per definizione) è il risultato di un
Quando s è una variabile continua, E p =
ds y
rapporto, se nessuna variazione è nulla, sarà sempre E p 1 :
E p > 1 ⇒ Δy % > Δs % . Si dice, in tal caso, che la funzione di produzione è caratterizzata da rendimenti crescenti di scala, perché l’output varia più che proporzionalmente rispetto
agli input.
E p = 1 ⇒ Δy % = Δs % . Si dice, in tal caso, che la funzione di produzione è caratterizzata da rendimenti costanti di scala, perché l’output varia nella stessa proporzione degli input.
E p < 1 ⇒ Δy % < Δs % . Si dice, in tal caso, che la funzione di produzione è caratterizzata da rendimenti decrescenti di scala, perché l’output varia meno che proporzionalmente
rispetto agli input.
6 Proposizione1.2 – Una funzione di produzione positivamente omogenea di grado α
genera sempre un’elasticità di produzione pari ad α.
Dimostrazione – Sia y = f (x) omogenea di grado α > 0. Ciò implica che f ( s x ) = sα f (x ) e,
dy s
s
= α sα −1 f ( x ) α
= α = Ep .
pertanto,
ds y
s f (x)
•
§2 – La massimizzazione del profitto.
Definizione 2.1 – Il profitto (Π) è la differenza tra ricavi (R) e costi (C).
I ricavi derivano dalla vendita dell’output realizzato e dipendono dal prezzo (p) e dalla quantità venduta: R = py .
I costi sono rappresentati dalla spesa che l’impresa sostiene per acquistare i fattori produttivi.
Dato l’insieme dei prezzi dei fattori utilizzati w = ( w1 , w2 ,..., wk ) , il costo risulta C = wx =
k
= ∑ wi xi .
i =1
La massimizzazione del profitto è soggetta sia a vincoli di mercato che a vincoli tecnologici.
I vincoli di mercato condizionano il prezzo al quale l’output può essere venduto. I vincoli
tecnologici condizionano i livelli di produzione realizzabili.
In questa sede assumeremo per semplicità che l’impresa operi in concorrenza e, pertanto, sia
costretta a vendere al prezzo prevalente di mercato. Il prezzo p è, quindi, a priori determinato.
I vincoli tecnologici non solo derivano dal grado di efficienza della tecnologia utilizzata, ma
anche dalla presenza di fattori la cui dotazione non può variare istantaneamente a seconda
delle esigenze di produzione, ma soltanto ad intervalli temporali discreti, la cui lunghezza dipende dal processo produttivo di riferimento.
Ai fini della massimizzazione del profitto, occorre, pertanto, distinguere tra “breve periodo” e
“lungo periodo”.
Il breve periodo è un intervallo temporale entro cui solo la dotazione di alcuni fattori può variare. Tali fattori si dicono variabili; gli altri, la cui dotazione non varia, si dicono fattori fissi.
Il lungo periodo è un intervallo temporale entro cui tutti i fattori possono variare.
Quando in una funzione di produzione si distinguono i fattori variabili da quelli fissi, si pone
y = f ( x, z )
dove x è il vettore dei fattori variabili e z il vettore dei fattori fissi.
Una tale funzione si definisce: funzione di produzione di breve periodo.
Con riferimento al breve periodo, il problema di massimizzazione del profitto si pone nel
modo seguente:
Π( p, w, z) = max [ pf (x, z) − ( wx + ω z z)] ,
x
dove il vettore ωz denota i prezzi d’uso dei fattori fissi.
La condizione necessaria per il massimo Π richiede che
7 ∂Π
= pf i − wi = 0
∀i ∈ [1, k ] ,
∂xi
da cui deduciamo pf i = wi ⇔ pMPi = wi .
La condizione del secondo ordine (o sufficiente) richiede che l’Hessiano
f11 f12 … f1k
H=
f 21
f 22 …
f 2k
f k1
fk 2 …
f kk
sia semidefinito negativo. Ciò accade quando fii < 0 (∀i), ossia quando la funzione di produzione è localmente concava (le produttività marginali sono decrescenti) in corrispondenza del
vettore x* (scelta ottima).
In conclusione, diremo che l’impresa operante in concorrenza massimizza il profitto quando
di ciascun fattore è utilizzata una quantità tale da uguagliare il valore della produttività marginale al prezzo del fattore stesso.
Poiché la produttività marginale di ciascun fattore è funzione della quantità utilizzata dello
stesso fattore, risolvendo per xi ciascuna delle equazioni pMPi = wi , otterremo il vettore x*
delle quantità ottime da utilizzare di tutti i fattori variabili. Essendo ogni xi* vincolata ai
prezzi p e w ed alla quantità dei fattori fissi z, convenzionalmente si pone x* ( p, w, z ) . Tale
vettore è definito insieme delle funzioni di domanda dei fattori variabili.
Quando si fa riferimento al lungo periodo, tutti i fattori sono variabili ed il problema di massimizzazione del profitto è posto nel modo seguente:
Π( p, w ) = max [ pf (x ) − wx ] .
x
Formalmente la soluzione è identica a quella già vista per il breve periodo: ciascun fattore
deve essere utilizzato nella misura in cui pf i = wi ∀i ∈ [1, ..., k ] , per cui x* = x( p, w ) .
La condizione del secondo ordine richiede sempre che H sia semidefinito negativo.
Osservazione 2.1 – Nel problema di massimizzazione del profitto possono sorgere
delle difficoltà:
a) Quando la tecnologia non è descrivibile con una funzione di produzione continua e
derivabile. Ciò accade se si opera con tecniche di produzione a coefficienti fissi. In tali situazioni occorre avvalersi di strumenti analitici diversi quali la programmazione
lineare e non per determinare le funzioni di domanda dei fattori.
b) Quando la funzione di produzione è caratterizzata da rendimenti di scala costanti (o
crescenti) non esiste un piano di produzione che massimizza Π.
Si supponga di voler determinare il piano di produzione che garantisca il profitto massimo Π*
> 0, ossia:
pf (x ) − wx = Π* > 0 .
Se f (x) ha rendimenti costanti di scala (Ep = 1, quindi, f ( sx) = sf (x) ), allora, per s > 1:
pf ( sx ) − w sx = ps f (x ) − s wx = sΠ > Π* .
Ciò implica che se Π > 0, la produzione dovrebbe essere smisuratamente grande e Π senza
limite.
8 Proprietà delle funzioni di domanda dei fattori.
Sia xi ( p, w ) la funzione di domanda del generico fattore xi.
1) La funzione xi ( p, w ) è sempre omogenea di grado zero.
Dimostrazione – Le xi ( p, w ) sono la soluzione del problema di max Π . Pertanto,
x
Π = pf (x) − wx
Moltiplichiamo p ed il vettore w per α > 0 e determiniamo il nuovo profitto
Π′ = α pf (x ) − α wx ,
da cui la condizione del primo ordine per il massimo risulta, ∀i ∈ [1,..., k ] , α pf i − α wi = 0 ⇔
pf i = wi , che è la soluzione di max Π .
x
•
Osservazione 2.2 – Quando si stimano delle funzioni di domanda per i fattori x, esse devono
essere sempre omogenee di grado zero per essere soluzione del problema di massimo profitto. Se ciò non accade, o la stima non è corretta o l’impresa non sta massimizzando il profitto.
2) Una variazione del prezzo wi genera sempre una variazione di segno opposto della
domanda di xi, ovvero ∂xi ∂wi < 0 .
Dimostrazione – Per semplicità consideriamo una tecnica di produzione x ∈ R 2 , per cui
Π = pf ( x1 , x2 ) − w1 x1 − w2 x2 . Ne consegue che
⎧ pf1 = w1
.
max Π ⇒ ⎨
x1 , x2
⎩ pf 2 = w2
Deriviamo rispetto a w1 e poi w2 questo risultato, ricordando che f i ( x1 , x2 ) :
⎛
∂x
∂x ⎞
p ⎜ f11 1 + f12 2 ⎟ = 1
∂w1 ⎠
⎝ ∂w1
⎛
∂x
∂x ⎞
p ⎜ f 21 1 + f 22 2 ⎟ = 0
∂w1 ⎠
⎝ ∂w1
⎛
∂x
∂x ⎞
p ⎜ f11 1 + f12 2 ⎟ = 0
∂w2 ⎠
⎝ ∂w2
⎛
∂x
∂x ⎞
p ⎜ f 21 1 + f 22 2 ⎟ = 1
∂w2 ⎠
⎝ ∂w2
Riscriviamo questo risultato in forma matriciale:
∂x1 ∂x1
f11 f12 ∂w1 ∂w2 1 p 0
⋅
=
.
f 21 f 22 ∂x2 ∂x2
0 1 p
∂w1 ∂w2
Se normalizziamo p = 1, la matrice di destra diviene unitaria I . Inoltre, poiché f12 = f 21 , la
prima matrice di sinistra è simmetrica e coincide con l’Hessiano H che è semidefinito negativo nel punto di massimo profitto. Pertanto:
∂x1 ∂w1 ∂x1 ∂w2
= H −1
∂x2 ∂w1 ∂x2 ∂w2
9 Se H è simmetrica e semidefinita negativa, anche H-1 lo sarà e, come tale, include lungo la
diagonale principale solo termini negativi. Ne consegue che anche la matrice ∂xi ∂w j , convenzionalmente definita “matrice di sostituzione”, è simmetrica e semidefinita negativa e,
quindi, ∂xi ∂wi < 0 ∀i .
•
Osservazione 2.3 – A causa della sua simmetria, la matrice ∂xi ∂w j implica ∂x1 ∂w2 =
= ∂x2 ∂w1 . Non esiste una spiegazione economica di questo risultato. Esso è soltanto conseguenza dell’assunzione che l’impresa punti alla massimizzazione del profitto.
§3 – La minimizzazione dei costi.
Supponiamo che l’impresa abbia definito il livello di output y da realizzare. Se il prezzo al
quale la produzione sarà venduta è predeterminato, il profitto sarà massimo se e solo se y è
realizzato al minimo costo.
Il problema di minimizzazione del costo si pone nel modo seguente:
min wx
x
sub y = f ( x )
dove f (x) , ossia il livello di produzione, è il vincolo.
Assumendo continua e derivabile f (x) , possiamo risolvere questo problema utilizzando il
metodo di Lagrange.
Il lagrangiano generato dal nostro problema è, pertanto:
k
, = ∑ wi xi − λ ( f ( x ) − y ) ,
i =1
dove λ > 0 è un moltiplicatore di Lagrange.
La condizione necessaria per il minimo vincolato è:
∂,
= wi − λ f i = 0 ∀i ∈ [1,..., k ]
∂xi
∂,
= y − f (x) = 0
∂λ
Ne consegue che:
fi 1
=
wi λ
∀i ∈ [1, ..., k ] .
Poiché λ è unico, se consideriamo i fattori due per volta otteniamo:
f
fi
f
w
= j ⇔ i = i ∀i ≠ j .
wi w j
f j wj
Essendo f i f j = TRSi j il Saggio marginale tecnico di sostituzione tra i fattori i e j, diremo
che il costo di produzione è minimo relativamente al livello prefissato dell’output se, per ogni
coppia di fattori, il TRS è uguagliato al rapporto tra i prezzi degli stessi fattori.
10 f
fi
= j vale per ogni i e j, powi w j
tremo dire che la condizione di minimo costo per l’output y è soddisfatta quando è realizzata
l’uguaglianza tra le produttività marginali ponderate di tutti i fattori produttivi.
In maniera alternativa ma equivalente, poiché l’uguaglianza
La condizione sufficiente per il minimo vincolato richiede che l’Hessiano orlato
0
− f1
− f2 … − fk
− f1 −λ f11 −λ f12 … − λ f1k
H = − f 2 −λ f 21 −λ f 22 … − λ f 2 k
− fk
−λ f k 1
−λ f k 2 … −λ f kk
sia definito negativo. Ciò accade quando tutti i minori principali di H sono negativi.
Per semplicità, possiamo verificare questa condizione nell’ipotesi che x ∈ R 2 . In questo caso,
H risulta
0
− f1
− f2
− f1 −λ f11 −λ f12
− f 2 −λ f 21 −λ f 22
da cui, sviluppando il determinante secondo la prima riga, accertiamo se H < 0 . Ricordando
che f12 = f 21 , otteniamo:
H = f1
− f1
− f2
−λ f12
−f
− f2 1
−λ f 22
− f2
−λ f11
= λ ( f12 f 22 − 2 f1 f 2 f12 + f 22 f11 ) .
−λ f 21
Poiché λ > 0, il segno dell’espressione dipende dal termine in parentesi. Essendo le produttività marginali f i > 0 (∀i ) e f ij ≥ 0 (∀i, j ) , H < 0 solo se le produttività marginali sono decrescenti, ossia f ii < 0 (∀i ) .
Il vettore x* soluzione del problema di minimizzazione del costo, si definisce “tecnica economicamente efficiente” e denota le “domande condizionate” dei fattori. Tale vettore è indicato convenzionalmente con x* ( w, y ) .
Osservazione 3.1 – Poiché per ogni livello di y è possibile determinare una tecnica economicamente efficiente, l’insieme delle tecniche economicamente efficienti è sempre incluso
nell’insieme delle tecniche efficienti tecnicamente.
Sostituendo il vettore x* ( w, y ) nell’equazione del costo, si determina una funzione che è definita “funzione del costo di produzione” o “funzione del costo minimale”:
C ( w, y ) = wx ( w, y ) .
La funzione di costo è, quindi, il costo minimo al quale ciascun livello di produzione può essere realizzato.
Osservazione 3.2 – A differenza della funzione di profitto per la quale potrebbe non esistere
un punto di ottimo, per la funzione di costo non si pone alcun problema: un punto di ottimo
(minimo costo) esiste sempre.
11 Proposizione 3.1 – La condizione di massimo profitto implicitamente include la condizione
di minimo costo.
Dimostrazione – La soluzione del problema di massimizzazione del profitto determinava
pf i = wi ∀i ∈ [1,..., k ] .
f
1
Questa uguaglianza può anche essere scritta come i = e vale per ogni i, ossia per tutti i
wi p
f
f
fattori. Essendo il prezzo p unico ed esogeno, sarà anche i = j per ogni i e j (i ≠ j). Ma
wi w j
quest’ultima uguaglianza è proprio la condizione di minimo costo.
•
Proprietà delle funzioni di domanda condizionate dei fattori.
Sia xi* ( w, y ) la domanda condizionata del generico fattore xi.
1) Il tasso di variazione della domanda condizionata di un fattore al variare del suo prez∂x
zo è sempre negativo: i < 0 ∀i .
∂wi
Dimostrazione – Consideriamo, per semplicità, tecniche di produzione x ∈ R 2 . In tal caso, la
minimizzazione del costo, subordinatamente al livello y di output, implica:
y − f ( x1 , x2 ) = 0
w1 − λ f1 = 0
w2 − λ f 2 = 0
Differenziamo rispetto a w1 ciascuna delle tre precedenti equazioni, ricordando che le produttività marginali sono funzioni delle quantità dei fattori e che, questi ultimi, dipendono dai loro prezzi:
∂x
∂x
− f1 1 − f 2 2 = 0
∂w1
∂w1
⎛
∂x
∂x ⎞ ∂λ
1 − λ ⎜ f11 1 + f12 2 ⎟ −
f1 = 0
∂w1 ⎠ ∂w1
⎝ ∂w1
⎛
∂x
∂x ⎞ ∂λ
f2 = 0
−λ ⎜ f 21 1 + f 22 2 ⎟ −
∂w1 ⎠ ∂w1
⎝ ∂w1
Nella seconda equazione portiamo 1 dall’altra parte e riscriviamo il sistema in forma matriciale:
0
− f1
− f 2 ∂λ ∂w1
0
− f1 −λ f11 −λ f12 ∂x1 ∂w1 = 1
− f 2 −λ f 21 −λ f 22 ∂x2 ∂w1 0
Notiamo che la matrice di sinistra altro non è che l’Hessiano orlato H determinato per
x ∈ R 2 . Utilizzando la regola di Cramer, calcoliamo
12 ∂x1
=
∂w1
0
− f1
− f2
0
− f2
−1 −λ f12
0 −λ f 22
f2
= 2 <0
H
H
perché H < 0. Con procedimento analogo, si dimostra che ∂x2 ∂w2 < 0 .
•
2) Se x ∈ R , il tasso di variazione della domanda condizionata di un fattore al variare
del prezzo dell’altro fattore è sempre positivo.
Dimostrazione – Utilizzando il sistema in forma matriciale al precedente punto 1), calcoliamo:
0
− f1
0
− f1 −λ f11 −1
∂x2 − f 2 −λ f 21 0
f f
=
=− 1 2 >0
∂w1
H
H
2
perché H < 0.
•
Osservazione 3.3 – Con procedimento analogo si dimostra che ∂x1 ∂w2 = − f 2 f1 H > 0 è identico a ∂x2 ∂w1 . Come nella massimizzazione del profitto, l’effetto incrociato della variazione del prezzo di un fattore è simmetrico.
Osservazione 3.4 – Se consideriamo x ∈ R k , l’effetto incrociato della variazione di un prezzo
wj è sempre simmetrico, ma può risultare positivo o negativo: ∂xi ∂w j > 0 implica che tra i
fattori xi e xj esiste un rapporto di sostituibilità (come per x ∈ R 2 ); ∂xi ∂w j < 0 implica che
tra i fattori xi e xj esiste un rapporto di complementarietà.
§4 – La funzione di costo.
Nel paragrafo precedente abbiamo implicitamente assunto che tutti i fattori fossero variabili.
Pertanto, la funzione di costo che abbiamo determinato è una funzione di costo di lungo periodo. Se consideriamo il breve periodo, alcuni fattori sono fissi e, quindi, dovremo minimizzare il costo solo relativamente ai fattori variabili:
min ( wx + w′z )
x
sub y = f ( x, z )
Risolvendo con il metodo di Lagrange determiniamo le domande condizionate dei fattori variabili x* ( w, y , z ) . Sostituendo tale vettore nell’equazione del costo, otteniamo
C ( w, y , z ) = wx + w′z
che rappresenta la funzione di costo di breve periodo. L’elemento w′z rappresenta i costi fissi.
13 La funzione di costo di breve periodo si differenzia da quella di lungo periodo per la presenza
dei costi fissi. Nel lungo periodo tutti i costi sono variabili.
Data una funzione di costo di breve periodo, assumendo dati i prezzi dei fattori, distinguiamo
tra:
Costo totale – C = CV + CF (costo variabile + costo fisso);
Costo medio – AC = C y = CV y + CF y (costo variabile medio + costo fisso medio);
dC dCV
=
(tasso di variazione del costo al variare dell’output).
Costo marginale – MC =
dy
dy
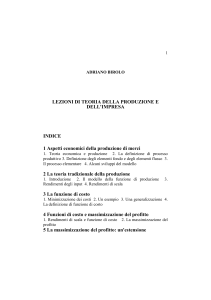
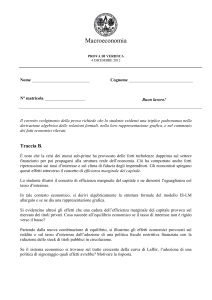
La fig. 3(a) illustra il tipico andamento di una funzione di costo.
Osservazione 4.1 – I costi marginali sono sempre positivi (per aumentare la produzione occorre accrescere l’utilizzazione dei fattori e, quindi accrescere la
spesa) ed includono solo i costi variabili.
La funzione di costo medio assume generalmente una
forma ad ∪. Ciò si deve al termine CF y il quale decresce sempre al crescere di y. Pertanto, finché
l’incidenza dei costi fissi è elevata, comparativamente ai costi variabili, AC decresce. Quando l’incidenza
dei costi variabili diviene prevalente, AC cresce.
Se la funzione AC ha una forma ad ∪, allora esiste ŷ
tale che AC ( yˆ ) sia un punto di minimo relativo.
AC ( yˆ ) si definisce “scala minima efficiente”.
Determiniamo il minimo di AC. Ciò implica:
⎞
dAC 1 ⎛ dCV
= 2⎜
y − CV − CF ⎟ = 0 ⇒ MC = C y ( = AC ) ,
dy
y ⎝ dy
⎠
ossia che, nel suo punto di minimo, il costo medio uguaglia il costo marginale.
Possiamo così dedurre che: per y ≤ yˆ : MC ≤ AC , per y ≥ yˆ : MC ≥ AC .
Proposizione 4.1 – Nel punto di minimo costo medio, il costo marginale è crescente. La funzione MC, pertanto, taglia dal basso la curva AC.
Dimostrazione – Verificando la condizione del secondo ordine per il minimo, deve risultare
d 2 AC
> 0 . Calcoliamo questa derivata:
dy 2
⎞ 1 ⎛ d 2CV
d 2 AC
2 ⎛ dCV
dCV dCV ⎞
=− 3⎜
y − CV − CF ⎟ + 2 ⎜
y+
−
⎟.
2
dy
y ⎝ dy
dy
dy ⎠
⎠ y ⎝ dy
d 2 AC 1 d 2CV
1 dMC
dMC
= 2
= 2
> 0 se e solo se
> 0 , ossia se il costo margiIn ŷ risulta
2
2
dy
y dy
y dy
dy
nale è crescente. Si veda la fig. 3(b).
•
14 Proposizione 4.2 – L’andamento del costo marginale dipende dai rendimenti di scala dei fattori variabili.
Dimostrazione – Supponiamo che f (x, z) sia caratterizzata da rendimenti crescenti di scala.
In tal caso, Ep > 1 e, quindi, l’output cresce, al variare della scala di produzione, più che proporzionalmente relativamente agli input. Le variazioni della scala di produzione, allo stesso
tempo, fanno crescere proporzionalmente il costo. Infatti, ponendo C = wx + w′z , moltiplicando per s tutti i fattori variabili, determiniamo C = w( sx ) + w′z , da cui dC = wx ds implidC
= wx = costante. Pertanto, MC = dC dy al variare di s esibirà un denominatore (dy)
ca
ds
che cresce più rapidamente del numeratore (dC). Quindi, MC è decrescente quando i rendimenti di scala sono crescenti.
Allo stesso modo possiamo verificare che Ep = 1 (rendimenti costanti di scala) implica MC
costante, mentre Ep < 1 (rendimenti decrescenti di scala) implica MC crescente.
•
Osservazione 4.2 – Quanto detto per la funzione MC si estende anche alla funzione AC.
Osservazione 4.3 – Il legame tra rendimenti di scala dei fattori variabili e costo marginale e
medio di breve periodo si estende alle funzioni di costo marginale e medio di lungo periodo.
In questo caso i rendimenti di scala fanno riferimento a tutti i fattori.
Proposizione 4.3 – L’area sotto la curva del costo marginale denota il costo variabile di produzione.
Dimostrazione – Ricordando il Teorema fondamentale del calcolo differenziale, osserviamo
y dC
dτ = CV ( y ) − CV (0) . Essendo pari a zero il costo variabile di una produzione nulche ∫
0 dτ
la, l’asserto è dimostrato.
•
Assumiamo che i prezzi dei fattori siano costanti e consideriamo la funzione di costo di lungo
periodo, evidenziando quelli che, nel breve periodo, sono i fattori fissi: CL = C ( y , z( y ) ) .
Sia y* un livello di output realizzato con una tecnica economicamente efficiente di lungo periodo. Ciò implica che z* = z( y * ) sarà il vettore delle domande condizionate dei fattori fissi.
Osservazione 4.4 – Il costo di breve periodo è sempre almeno altrettanto grande quanto il costo di lungo periodo:
C ( y, z* ) ≥ CL ( y , z( y ) ) ∀y ∈ Y .
In altri termini, la funzione di costo di breve periodo giace sempre sopra la funzione di costo
di lungo periodo. Nel lungo periodo infatti, l’impresa ha sempre la possibilità di adeguare i
fattori fissi al livello corrente di produzione migliorando così l’efficienza.
Proposizione 4.4 – Se y* è realizzato con una tecnica economicamente efficiente di lungo periodo, le funzioni di costo di breve e quella di lungo sono tangenti in y*.
Dimostrazione – Se y = y*, allora z = z*. Pertanto,
15 C ( y * , z* ) = C L ( y * , z ( y * ) ) .
Derivando rispetto a y, otteniamo
∂C ∂CL ∂CL ∂z
=
+
.
∂y
∂y
∂z ∂y
Poiché in y* il costo dei fattori fissi è minimizzato, necessariamente ∂CL ∂z = 0 . In tale punto, pertanto,
∂C ( y * , z ) ∂CL
=
∂y
∂y
•
Proprietà della funzione di costo.
Sia y = y un livello costante di produzione.
1) C ( w, y ) è non decrescente in w. Ciò equivale a dire che w′ ≥ w ⇒ C ( w′, y ) ≥
C ( w, y ) .
Dimostrazione – Siano x’ e x tecniche di produzione che minimizzano il costo di y , rispettivamente con i prezzi w’ e w. Ciò implica che wx ≤ wx′ e anche che wx′ ≤ w′x′ . Mettendo
insieme le due disuguaglianze, deduciamo che
w′x′ ≥ wx ⇔ C ( w′, y ) ≥ C ( w, y ) .
•
2) C ( w, y ) è una funzione omogenea di primo grado: C (t w, y ) = t C ( w, y) .
Dimostrazione – Sia x una tecnica economicamente efficiente con i prezzi w e sia w’ = tw un
nuovo livello di prezzi. Supponiamo che x’ sia la tecnica che minimizza i costi con i prezzi
w’. Deve essere allora: w′x′ ≤ w′x ⇔ t wx′ ≤ t wx ⇔ wx′ ≤ wx . Questo risultato è in contraddizione con l’assunto che x sia una tecnica economicamente efficiente ai prezzi w. Pertanto,
wx′ = wx ⇔ x′ = x . Quindi se x minimizza il costo ai prezzi w, x sarà sempre economicamente efficiente anche ai prezzi tw. In altri termini, poiché x non cambia, il costo crescerà
nella stessa proporzione dei prezzi.
•
3) C ( w, y ) è concava in w.
Dimostrazione – Siano ( w, x ) e ( w′, x′) due combinazioni prezzi-fattori che minimizzano
C. Sia, inoltre, w’’ un vettore di prezzi combinazione lineare di w e w’, ossia
w′′ = α w + (1 − α ) w′ dove α ∈ [ 0, 1] . La funzione di costo generata da w’’ sarà
C ( w′′, y ) = w′′x′′ = α wx′′ + (1 − α ) w′x′′ ,
ma x’’ non è necessariamente la tecnica che minimizza C ai prezzi w e w’. Pertanto,
wx′′ ≥ C ( w, y ) e w′x′′ ≥ C ( w′, y ) . Sostituendo nell’uguaglianza precedente, ne consegue che
C ( w′′, y ) ≥ α C ( w, y ) + (1 − α )C ( w′, y ) .
•
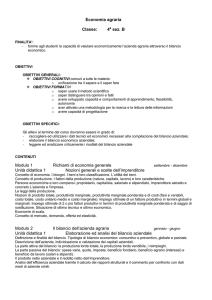
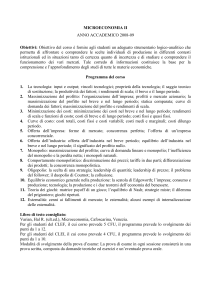
16 Osservazione 4.5 – La proprietà 3) è molto importante e non immediatamente intuitiva. Consideriamo perciò il caso di un solo prezzo variabile (w1) e tracciamo il grafico (fig. 4)
k
dell’equazione del costo C = w1 x1 + ∑ w j x j e della funzione di costo C ( w, y ) .
j ≠1
Sia x* la tecnica economicamente efficiente (che
include x1* ) ai prezzi w ( che include w1 ). Se
w1′ > w1 e l’impresa continua ad utilizzare x1* , il
costo crescerà proporzionalmente (lungo la retta).
L’impresa tuttavia, potrà modificare la tecnica di
produzione per continuare a minimizzare il costo,
spostandosi lungo la curva. Le due funzioni hanno
un solo punto in comune che è quello che corrisponde all’ascissa w1 . La concavità implica, in
pratica, che la funzione di costo cresce al crescere
di un prezzo, ma a tassi decrescenti. Ciò accade perché il fattore il cui prezzo cresce tende ad
essere sostituito da altri fattori meno costosi.
Proposizione 4.5 – Nel problema di minimizzazione del costo, il moltiplicatore di Lagrange λ
denota il costo marginale di produzione.
Dimostrazione – Sia C = wx un’equazione di costo. Differenziando, otteniamo
k
dC = ∑ wi dxi .
i =1
Dalla condizione di minimo costo sub. y, risulta
wi − λ f i = 0 ∀i ∈ [1,..., k ]
k
e, pertanto, wi = λ f i . Sostituendo nel differenziale totale, otteniamo dC = λ ∑ f i dxi . Poiché
*
i =1
la soluzione di ottimo x soddisfa anche il vincolo y = f (x ) , differenziando quest’ultimo, si
k
dC
= λ = MC .
ricava dy = ∑ f i dxi . Ne consegue che dC = λ dy , da cui
dy
i =1
•
Lemma di Shephard – Sia xi ( w, y ) la domanda condizionata del fattore xi. Se la funzione di
costo è continua e differenziabile in ( w, y ) , allora
∂C (w, y )
xi (w, y ) =
∀i ∈ [1,..., k ] .
∂wi
Dimostrazione – Sia x la tecnica economicamente efficiente per i prezzi w . Definiamo la
seguente funzione:
g ( w ) = C ( w, y ) − wx .
In corrispondenza dei prezzi w = w , la funzione g ( w) = 0 . Ciò implica che tale funzione è
sempre non positiva, perché C ( w, y ) ≤ wx . In w , quindi, la funzione g ( w ) raggiunge il suo
massimo e, pertanto, le sue derivate devono essere nulle in w :
17 ∂g ( w ) ∂C ( w, y )
=
− xi ( w, y ) = 0 ∀i ∈ [1,..., k ] ,
∂wi
∂wi
da cui segue l’asserto.
•
Osservazione 4.6 – Il Lemma di Shephard ci consente di capire che il vettore degli input che
minimizza il costo altro non è che il vettore delle derivare di C ( w, y ) rispetto ai prezzi w.
Osservazione 4.7 – Il legame tra le variazioni del costo ed i livelli di produzione è, nella pratica, analizzato attraverso le cosiddette “Economie o diseconomie di Scala”. Le economie di
scala sono misurate da un coefficiente di elasticità (ES) calcolato come rapporto tra la variazione relativa o percentuale del costo e variazioni relative o percentuali del livello
dell’output:
ΔC % ΔC Δy ΔC y
ES =
=
:
=
.
Δy %
Δy C
C
y
dC y
Quando si dispone di una stima della funzione C e tale funzione è derivabile, ES =
dy C
dC dy MC
che può anche scriversi: ES =
. Poiché ES è comunque il risultato di un rappor=
C y
AC
to (se nessuna variazione è nulla) ES
1.
Quando ES < 1, il costo cresce meno che proporzionalmente relativamente all’output (MC <
AC). In tal caso, l’impresa realizza economie di scala aumentando la produzione.
Quando ES = 1, il costo cresce proporzionalmente all’output (MC = AC). In tal caso non vi
sono né economie, né diseconomie di scala, perché l’impresa opera in corrispondenza della
sua “scala minima efficiente”.
Quando ES > 1, il costo cresce più che proporzionalmente relativamente all’output (MC >
AC). In tal caso, l’impresa realizza diseconomie di scala aumentando la produzione.
18