UNIVERSITÀ DEL SALENTO
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE, NATURALI
CORSO DI LAUREA IN FISICA
TESI DI LAUREA SPECIALISTICA
ANALISI DATI PER UN’INTERFACCIA
CERVELLO-COMPUTER
Relatore:
Ch.mo Dott. GIORGIO DE NUNZIO
Correlatore:
Ch.ma Dott.ssa MARINA DONATIVI
Laureando:
ROBERTO DEMITRI
Anno Accademico 2010-2011
SOMMARIO
INTRODUZIONE.................................................................................................................................................... 5
1
INTERFACCE CERVELLO-COMPUTER ..................................................................................................... 7
1.1
1.1.1
1.2
1.3
1.3.1
1.4
2
I SEGNALI ELETTROENCEFALOGRAFICI .............................................................................................. 18
2.1
2.1.1
2.2
2.2.1
2.2.2
2.3
2.3.1
2.3.2
2.3.3
2.3.4
2.3.5
2.3.6
2.4
2.5
2.6
3
CENNI DI NEUROFISIOLOGIA ................................................................................................................... 18
La corteccia cerebrale .................................................................................................................. 20
LA FISICA DEI SEGNALI EEG ................................................................................................................... 21
Il problema diretto ....................................................................................................................... 22
Il problema inverso ....................................................................................................................... 26
ACQUISIZIONE DEL SEGNALE EEG ........................................................................................................... 28
Gli elettrodi ................................................................................................................................... 29
Montaggio degli elettrodi............................................................................................................. 30
Amplificazione .............................................................................................................................. 32
AC-Coupler .................................................................................................................................... 35
Filtri .............................................................................................................................................. 35
Campionamento ........................................................................................................................... 36
TRACCIATO EEG ................................................................................................................................... 37
I POTENZIALI EVOCATI EVENTO-CORRELATI (ERP) .................................................................................. 39
POTENZIALI UTILI PER SISTEMI BCI ........................................................................................................ 40
ANALISI DEI DATI EEG ............................................................................................................................ 45
3.1
3.2
3.2.1
3.2.2
3.2.3
3.2.4
3.3
3.3.1
3.3.2
3.4
3.5
3.5.1
4
CHE COS’È UN SISTEMA BCI...................................................................................................................... 7
Schema a blocchi di un sistema BCI ............................................................................................... 8
UN PO’ DI STORIA .................................................................................................................................... 9
CLASSIFICAZIONE DELLE TECNICHE PER BCI ............................................................................................ 12
BCI dipendente e BCI indipendente .............................................................................................. 15
BCI PER “UNSPOKEN SPEECH” ............................................................................................................... 15
CLASSIFICAZIONE DEGLI ARTEFATTI ....................................................................................................... 46
METODO ICA ....................................................................................................................................... 48
Ambiguità nel modello ICA ........................................................................................................... 49
Indipendenza e incorrelazione..................................................................................................... 50
Nongaussianità delle componenti indipendenti .......................................................................... 51
Esempio di rimozione artefatti con ICA ....................................................................................... 53
ANALISI NEL DOMINIO DELLE FREQUENZE................................................................................................ 54
Trasformata di Fourier ................................................................................................................ 55
Trasformata di Wavelet ............................................................................................................... 58
FILTRAGGIO SPAZIALE ........................................................................................................................... 59
CLASSIFICATORE LINEARE ...................................................................................................................... 63
Test del classificatore ................................................................................................................... 64
ESPERIMENTI............................................................................................................................................ 67
4.1
4.1.1
4.2
4.2.1
4.2.2
4.2.3
4.2.4
4.2.5
4.3
4.4
4.5
4.6
MATERIALI E METODI ............................................................................................................................ 67
BCI 2000: presentazione degli stimoli ......................................................................................... 70
ANALISI DEI DATI – PREPROCESSING ....................................................................................................... 77
Cambiare la frequenza di campionamento ................................................................................. 79
Filtro passa banda ........................................................................................................................ 80
Estrazione delle Epoche ............................................................................................................... 81
Cambio del riferimento ................................................................................................................ 83
Rimozione degli artefatti tramite l’algoritmo ICA ...................................................................... 84
ANALISI DEI DATI – COMMON SPATIAL PATTERNS (CSP) ......................................................................... 87
RISULTATI ............................................................................................................................................ 90
CONCLUSIONI ....................................................................................................................................... 93
PROSPETTIVE FUTURE ........................................................................................................................... 95
BIBLIOGRAFIA.................................................................................................................................................... 97
INTRODUZIONE
La capacità di comunicare e controllare l'ambiente attraverso la mente è un argomento portato
all’attenzione della gente dai film più strani e fantastici di registi come David Cronenberg e
Bryan Singer. La scienza, dal canto suo, ha lavorato più velocemente di quanto si pensasse e,
ai giorni nostri, la capacità di controllare dispositivi e di comunicare attraverso la mente non è
più fantascienza. Le interfacce tra mente e computer si sono sviluppate molto rapidamente
negli ultimi 25 anni, facendo passi da gigante.
La realizzazione di interfacce Cervello-Computer è un area di ricerca in rapida crescita nel
campo delle neuroscienze e della bioingegneria. Un sistema di questo tipo legge segnali
elettrici cerebrali (EEG) o altre manifestazioni dell’attività cerebrale e li trasforma in segnali
digitali che un elaboratore processa e converte in azioni.
È stato dimostrato che si verificano attivazioni neurali nella corteccia motoria anche durante i
movimenti immaginati dei muscoli; queste attivazioni posso essere sfruttate per controllare
protesi in situazioni di incapacità di uso degli arti (soggetti paraplegici). Attivazioni neurali
nella corteccia motoria avvengono anche durante la ripetizione mentale di vocali o parole. Si
può dunque immaginare di sfruttare queste potenzialità relative al linguaggio per controllare,
ad esempio, un sintetizzatore vocale. In questo modo è possibile concepire un metodo di
comunicazione alternativo per individui affetti da gravi patologie quali SLA o paralisi totale.
La Tesi tratta delle tecniche di analisi dati utili per la realizzazione di un sistema di interfaccia
cervello-computer non invasiva, in particolare volta al pilotaggio di un sintetizzatore vocale
per soggetti impossibilitati a servirsi del normale apparato di fonazione. Dopo un'introduzione
generale all'argomento, la Tesi si sofferma sulla natura e sul trattamento dei segnali
elettroencefalografici, dal preprocessing per la rimozione di rumore ed artefatti, fino alle
tecniche di classificazione per il riconoscimento di pattern specifici.
Nella Tesi si descrive il segnale EEG, mixing di sorgenti situate in varie regioni del cervello,
e le difficoltà e le tecniche connesse con l’individuazione del segnale desiderato (relativo al
linguaggio), miscelato per esempio all’attività della corteccia visiva o all’attività muscolare.
L’applicazione di opportuni filtri spaziali può essere utile per risolvere il problema, agendo in
modo che i segnali di interesse siano esaltati dal filtro mentre i disturbi siano attenuati. In
particolare, l’applicazione di filtri spaziali può essere di ausilio per la classificazione di
segnali EEG appartenenti ad eventi diversi (nel caso di nostro interesse, l’articolazione di
vocali differenti), poiché i filtri operano in maniera tale da evidenziare le differenze tra
segnali di classe diversa.
5
Struttura della Tesi
Viene di seguito riassunta la struttura della Tesi, con brevi cenni su quanto sarà trattato nei
diversi capitoli.
Il primo capitolo offre una panoramica generale sui sistemi BCI: è illustrato brevemente il
percorso storico, presentate le varie tecniche esistenti e sono riportate alcune informazioni
bibliografiche sui recenti lavori riguardanti BCI nel campo della comunicazione.
Nel secondo capitolo sono descritte le caratteristiche principali del segnale elettrico
corticale e le metodologie di acquisizione tramite elettroencefalogramma. Sono delineati i
meccanismi coinvolti nella generazione e propagazione del segnale elettrico nella corteccia.
Sono poi descritte le caratteristiche più importanti del segnale EEG mettendo in evidenza
come i meccanismi alla base dell’attività elettrica corticale si riflettano nei tracciati EEG.
Il terzo capitolo tratta dell’elaborazione informatica dei segnali, dal preprocessing per
l’eliminazione del rumore fino alla classificazione dei pattern encefalografici. Sono discusse
in dettaglio le tecniche di analisi, l’algoritmo ICA (Independent Component Analysis) per la
rimozione degli artefatti, la trasformata di Fourier per l’analisi nel dominio della frequenza e
gli algoritmi di Common Spatial Patterns per l’estrazione delle caratteristiche salienti del
segnale elettroencefalografico. Il capitolo si conclude con qualche cenno sul classificatore
lineare (LDA) e sulle metodologie usate per testarne l’efficacia.
Il quarto capitolo è dedicato alla parte sperimentale, svolta in collaborazione con il CRIL
(Centro di Ricerca Interdisciplinare sul Linguaggio) dell'Università del Salento, e riporta i
primi risultati ottenuti nella realizzazione di un sistema BCI per il riconoscimento automatico
di vocali, limitato al momento alla discriminazione tra /a/ e /i/. Si descrivono gli esperimenti
realizzati, riportando dettagliatamente la procedura seguita in ogni singola fase relativa al
preprocessing, alla fase di estrazione delle caratteristiche salienti (feature discriminanti tra le
vocali /a/ e /i/) e quindi alla classificazione dei pattern encefalografici. Il capitolo termina con
le conclusioni e le prospettive future.
Seguono i Ringraziamenti e la Bibliografia essenziale.
6
1 INTERFACCE CERVELLO-COMPUTER
Di seguito sarà presentato in dettaglio che cosa si intende per interfaccia cervello-computer.
Nel corso del testo sarà utilizzato l'acronimo BCI per abbreviare la dicitura in lingua inglese
Brain-Computer Interface.
1.1 Che cos’è un sistema BCI
Con l’acronimo BCI si identifica un sistema capace, attraverso un dispositivo e un protocollo
di comunicazione, di connettere direttamente il sistema nervoso cerebrale e una macchina.
Un dispositivo BCI fornisce al cervello un canale di controllo e di comunicazione alternativo
che non prevede l’uso dell’apparato muscolare. È stato dimostrato, infatti, che si verificano
attivazioni neurali nella corteccia motoria durante i movimenti immaginati degli arti: queste
attivazioni sono sfruttabili, tramite i sistemi BCI, per controllare i movimenti di neuro-protesi.
I sistemi BCI rappresentano una promettente opportunità per coloro che hanno gravi disabilità
nell’apparato motorio, quali individui affetti da SLA o da paralisi totale.
Bisogna altresì sottolineare che le applicazioni BCI non si limitano strettamente al campo
medico ma sono presenti in svariati altri ambiti (ad esempio, operazioni di polizia o militari),
il che contribuisce a spiegare l’impulso che in tutto il mondo questi studi stanno ricevendo
(anche in termini di finanziamenti).
Per rendere possibile la connessione diretta tra sistema nervoso cerebrale e una macchina è
necessario che il dispositivo possa “registrare” l’attività mentale di un individuo, e a tale
proposito vi sono varie tecniche di misura.
La maggior parte di questi dispositivi effettua registrazioni dell'attività del cervello prodotta
dallo scambio di segnali elettrici tra i neuroni del sistema nervoso umano. Alcuni metodi di
registrazione, chiamati MEG (magnetoencefalografia), rilevano i campi magnetici generati
dalle correnti elettriche nel cervello; altri utilizzano la risonanza magnetica funzionale, fMRI,
e altri ancora usano la spettroscopia nel vicino infrarosso, NIRS, per visualizzare l'attività
della circolazione sanguigna del cervello.
I dispositivi MEG o fMRI sono voluminosi e costosi, limitando così le loro applicazioni in
ambienti specializzati. I NIRS sono relativamente più piccoli e meno costosi, si basano sulla
risposta dinamica del flusso sanguigno che attraversa il cervello e i tessuti vicini, fatto che
rende il processo di analisi molto lungo e non adatto ad applicazioni in tempo reale come si
pretende in un sistema BCI. Per questi ed altri motivi, le ricerche sulle BCI si sono focalizzate
sui segnali bioelettrici registrati attraverso metodi di elettroencefalografia (EEG) e di
7
elettrocorticografia (ECoG). Vista la facile reperibilità e il semplice utilizzo del metodo EEG,
la maggior parte delle ricerche si sono indirizzate verso l'analisi e l'approfondimento di questa
tecnica di registrazione.
I segnali registrati sono inizialmente ripuliti da artefatti che interferiscono con il segnale, quali
attività oculare o attività muscolare.
Successivamente a questa fase, segue l'analisi e la “traduzione”, dove vengono estratte le
caratteristiche di interesse del segnale per essere tradotte in comandi e informazioni di
controllo per dispositivi hardware o software. Ognuna di queste fasi può essere a sua volta
scomposta in varie sotto-fasi.
1.1.1 Schema a blocchi di un sistema BCI
Un sistema BCI può essere suddiviso in differenti parti (Figura 1): (1) acquisizione del
segnale,(2) signal processing (pre-elaborazione, estrazione di feature e algoritmo di
traduzione), (3) interfaccia di output.
Queste parti sono di seguito dettagliate:
1. L’acquisizione del segnale è usualmente realizzata attraverso l’EEG invasivo e/o non
invasivo, registrando potenziali evocati o spontanei (di cui si parlerà nei prossimi
capitoli).
2. Il blocco signal processing può essere suddiviso in tre sottoblocchi:
a. la parte di pre-elaborazione che, attraverso l’utilizzo di circuiti analogici,
amplifica il segnale EEG, lo filtra e lo digitalizza;
b. il blocco di estrazione delle feature, che consiste in una o più procedure di
elaborazione del segnale come: filtraggio spaziale, analisi spettrale o tempofrequenza, etc. che estraggono (i.e. misurano/calcolano) le caratteristiche del
segnale che contiene il messaggio (o comando) da comunicare all’esterno;
c. il blocco di classificazione, in grado di interpretare le caratteristiche estratte dal
segnale, in maniera discriminante verso altri possibili messaggi, per creare il
comando vero e proprio da inviare poi all’interfaccia di output. Spesso il
classificatore comprende anche algoritmi di adattamento al singolo soggetto; in
particolare, possono essere implementati tre differenti livelli di adattamento:
un primo livello con il quale il sistema si adatta alle caratteristiche del segnale
misurato; un secondo livello per l’adattamento alla variabilità a breve e a lungo
termine del segnale EEG; un terzo livello per aggiustare la capacità di
accomodamento del cervello durante l’utilizzo del sistema. Quest’ultimo
adattamento è necessario in quanto, essendo la BCI un sistema di
8
comunicazione alternativo alle normali vie di comunicazione, come queste
necessita di una retroazione, un feedback, che vada ad influenzare il
comportamento stesso del cervello nei riguardi della BCI aumentandone
l’efficienza. Il biofeedback è quindi un’informazione data al soggetto con lo
scopo di aiutare lo stesso a migliorare l’azione di controllo che sta svolgendo.
3. L’interfaccia di output si occupa di controllare qualsiasi applicazione, da una semplice
carrozzina elettrica alle più complesse neuroprotesi
Figura 1 Schema a blocchi di un sistema BCI
1.2 Un po’ di storia
Il via all’indagine dei segnali provenienti dall’attività cerebrale fu dato dallo scienziato Hans
Berger il quale, nel 1929, scoprì l'esistenza di una differenza di potenziale tra due elettrodi
posti sullo scalpo; la costruzione del primo elettroencefalogramma ha permesso la scoperta
dell'esistenza di una correlazione tra la differenza di potenziale misurata ai capi dei due
elettrodi e l'attività cerebrale.
La prima apparizione dell’espressione “interfaccia cervello-computer”,nella letteratura
scientifica, risale invece agli anni '70, a seguito della pubblicazione di alcuni documenti [1]
[2] relativi ad una ricerca condotta dal DARPA1presso l’Università della California di Los
Angeles.
1
Agenzia del Dipartimento della Difesa degli Stati Uniti responsabile dello sviluppo di tecnologie per uso
militare.
9
Sempre in questo periodo, Fetz e i suoi colleghi [3] hanno dimostrato, attraverso l’uso del
biofeedback, che le scimmie possono rapidamente imparare a controllare la loro attività
neuronale in corrispondenza della corteccia motoria primaria se opportunamente
ricompensate (per esempio con del cibo).
Nel 1980 Georgopoulos alla Johns Hopkins University trovò una relazione matematica tra la
risposta elettrica di singoli neuroni della corteccia motoria nelle scimmie macacus rhesus e la
direzione nella quale gli animali muovevano le braccia. Trovò inoltre che diversi gruppi di
neuroni sparsi in differenti aree del cervello controllavano i comandi motori, ma non riuscì a
registrare simultaneamente la loro risposta elettrica a causa delle limitazione tecniche imposte
dal suo equipaggiamento [4].
A metà degli anni '90 c’è stato un rapido sviluppo in campo BCI. Parecchi gruppi sono riusciti
a catturare segnali complessi della parte motoria del cervello sfruttando registrazioni di
ensambles neuronali (gruppi di neuroni) per il pilotaggio di dispositivi esterni.
In questo periodo, Philip Kennedy e colleghi hanno realizzato la prima interfaccia cervello
computer impiantando un elettrodo neurotrofico conico2 in una scimmia.
Nel 1999, un gruppo di ricercatori capeggiati da Yang Dan presso l’Università di Berkeley
della California hanno decodificato l’attività neurale per riprodurre le immagini viste dai gatti
usando una serie di elettrodi impiantati. I ricercatori si sono concentrati su 117 cellule
cerebrali di una zona del talamo (la parte che decodifica i segnali provenienti dalla retina). I
gatti hanno visto otto filmati e, dopo la registrazione della la loro attività neuronale, sono state
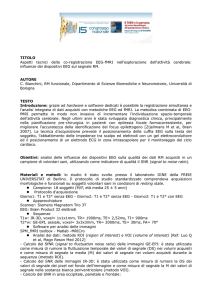
ricostruite alcune immagini con l’uso di opportuni filtri matematici (Figura 2) [5].
Figura 2 Le immagini originali (in alto), ovvero i frame del filmato a cui i gatti anno assistito, e le immagini
ricostruite (in basso) attraverso i segnali prelevati dal talamo.
2
Elettrodo avente la forma di un cono di vetro, lungo meno di un millimetro; il termine neurotrofico si riferisce
all’azione esercita sul sistema nervoso, poiché stimola la crescita neuronale intorno e dentro l’elettrodo,
favorendo così il contatto.
10
Miguel Nicolelis è stato uno dei maggiori sostenitori dell’indagine dei segnali neuronali con
l’utilizzo di multielettrodi; secondo quanto sosteneva, indagando su una superficie più ampia
del cervello si può ottenere un’informazione neurale che riduce l’estrema variabilità del
segnale ricavato da un singolo elettrodo, che può rendere difficile la gestione di un dispositivo
BCI.
Dopo i primi studi condotti negli anni '90, Nicolelis e i suoi colleghi hanno sviluppato delle
BCI capaci di decodificare l’attività cerebrale di alcune scimmie gufo e usarla per riprodurre i
movimenti della scimmia attraverso un braccio robotico. Le scimmie gufo hanno dimostrato
di essere soggetti ideali per questo tipo di esperimenti mostrando grande abilità del
raggiungere, afferrare e manipolare degli oggetti attraverso un braccio robotico. Nel 2000 il
gruppo è riuscito a costruire un sistema BCI che riproduceva in tempo reale, con il braccio
meccanico, i movimenti della scimmia gufo, mentre la scimmia muoveva un joystick o
prendeva del cibo. Questo tipo d’interfaccia gestita in tempo reale avrebbe potuto consentire
il controllo di un robot in remoto tramite un protocollo internet. Il sistema si limitava a
riprodurre i movimenti eseguiti dalle scimmie, ma queste, mentre eseguivano i movimenti,
non vedevano e dunque non tenevano in considerazione il movimento del braccio, non
ricevendo quindi da esso alcuna informazione di feedback (BCI ad anello aperto).
Negli esperimenti successivi di Nicolelis sono state impiegate delle scimmie rhesus poiché
ritenute migliori modelli di riferimento per la neurofisiologia umana rispetto alle scimmie
gufo. In questi esperimenti le scimmie rhesus sono state addestrate preliminarmente a
raggiungere ed afferrare oggetti su uno schermo di un computer attraverso l’uso di un
joystick, mentre i movimenti corrispondenti del braccio robotico sono stati nascosti (vedi
Figura 3). Successivamente è stato mostrato loro il robot ed esse hanno imparato a
controllarlo osservando i suoi movimenti. La BCI ha utilizzato la velocità giusta (grazie
all’addestramento preliminare) per controllare i movimenti di raggiungimento degli oggetti,
così come la giusta forza della presa [6].
11
Figura 3 Schema dell’esperimento di Nicolelis (fase di addestramento)
Dopo gli esperimenti di Nicolelis, in altri laboratori sono stati sviluppati BCI e algoritmi per
la decodifica del segnale neurale. Tra questi, i più famosi ricercatori sono stati John
Donoghue della Brown University, Andrew Schwartz dell’Università di Pittsburgh, e Richard
Andersen di Caltech. Questi scienziati sono stati in grado di produrre BCI con le registrazioni
di segnali prelevati da un numero inferiore di neuroni rispetto agli esperimenti di Nicolelis
(15-30 neuroni rispetto a 50-200 neuroni) [7]. Il gruppo di Donoghue ha realizzato un BCI per
addestrare delle scimmie rhesus a raggiungere ed afferrare oggetti su uno schermo di un
computer senza l’uso del joystick (BCI ad anello chiuso) [8]. Il gruppo di Schwartz ha invece
dimostrato che una scimmia si può nutrire attraverso un braccio robotico controllato da
segnali provenienti dal suo cervello [9].
I risultati ottenuti con la sperimentazione sulle scimmie rhesus hanno portato inevitabilmente
l’impiego di queste tecniche anche sull’uomo; infatti già nel 1998 Philip Kennedy realizzò in
un uomo il primo impianto cerebrale per simulare dei movimenti; il paziente, Johnny Ray,
affetto da paralisi totale riuscì a controllare un cursore sullo schermo di un computer [10].
Nel 2005 Matt Nagle, un paziente tetraplegico, è diventato la prima persona a controllare una
mano artificiale utilizzando una BCI. L’impianto di una serie di 96 elettrodi nella corteccia
motoria ha permesso a Nagle di controllare il braccio robotico semplicemente pensando di
spostare la sua mano, riuscendo anche a spostare un cursore su computer, accedere le luci in
una stanza o accendere l’apparecchio televisivo [11].
1.3 Classificazione delle tecniche per BCI
Secondo dove prelevano i segnali neurali, i sistemi BCI possono essere classificati come
(Figura 4):
12
-
Non invasivi (EEG): l’EEG ottiene i segnali elettrici direttamente dal cuoio capelluto,
è il metodo di registrazione più diffuso grazie alla sua innocuità per il soggetto e ai
suoi requisiti tecnici.
-
Invasivi: Le BCI invasive recuperano il segnale di singolo neurone attraverso
microelettrodi impiantati negli strati corticali.
-
Parzialmente invasivi: usano segnali elettrocorticografici (ECoG) provenienti da
sensori posizionati sulla superficie corticale, sopra o sotto la dura madre3.
I metodi di prelievo del segnale, appartenenti a queste ultime due classi, richiedono
naturalmente l’impianto neurologico.
I sistemi basati sul segnale EEG hanno reso possibile, a individui con gravi disabilità motorie,
inclusi individui affetti da SLA o con gravi danni alla colonna vertebrale, il controllo di
cursore, in due dimensioni, sullo schermo di un computer[12]. Inoltre, queste tecnologie, sono
state usate da individui sani per il pilotaggio di robot manipolanti vari oggetti. Quindi le
interfacce BCI non invasive, hanno un alto potenziale nel campo delle arto-protesi [13]. I
dispositivi basati sui segnali EEG, tuttavia, sono fondamentalmente limitati dal contenuto
informativo del segnale, che non racchiude informazioni riguardanti alcune componenti del
movimento, quali posizione e velocità [13]; inoltre le registrazioni di tali segnali sono
soggette ad interferenza da parte delle attività elettromiografiche della muscolatura cranica.
Le BCI invasive possono acquisire i segnali con maggiore contenuto informativo e consentire
elevate prestazioni [14]. Ad esempio, individui affetti da paralisi totale possono essere in
grado di comunicare attraverso messaggi digitati spostando i cursori di una tastiera dopo aver
subito l’impianto di elettrodi che favoriscono la crescita di fibre nervose mieliniche [10]. Con
l’aiuto di una serie di 96 microelettrodi che registrano i segnali dalla corteccia motoria
primaria, alcuni pazienti tetraplegici sono stati in grado si eseguire un controllo di base su un
arto robotico, come per esempio l’apertura e chiusura di una mano, anche anni dopo la lesione
del midollo spinale [11].
Recentemente, si è visto come l’ECoG sia un ottimo strumento per rilevare segnali di ingresso
per sistemi BCI. A differenza dei segnali EEG, gli ECoG sono in grado di rilevare segnali a
frequenza maggiore (banda gamma) che sono il prodotto di piccole attività corticali e sono
correlati allo scarico dei potenziali d’azione dei neuroni (vedi §2.1). Poiché non sono
3
La dura madre (o pachimeninge) è la parte più esterna e più spessa delle meningi
13
incorporati nel parenchima cerebrale, gli elettrodi ECoG infliggono meno danni alla corteccia
e anche l’effetto di deterioramento del segnale è inferiore al metodo invasivo4; i segnali ECoG
sono stati utilizzati per il controllo di dispositivi in 2D a un livello di prestazioni simili a
quelli ottenuto con il metodo invasivo [15]. In conclusione, anche se quest’approccio non è
stato ancora utilizzato in individui con disabilità motorie, risulta essere più sicuro di quello
invasivo e con maggior contenuto informativo rispetto al metodo EEG.
Anche se il metodo invasivo e il metodo parzialmente invasivo hanno un grande potenziale
nel recupero funzionale di individui con disabilità motorie, i rischi attuali e le limitazioni
associate all’impianto non ne consentono un uso diffuso. Una delle principali carenze della
tecnologia attuale è associata alla perdita di affidabilità del segnale nel tempo. Infatti, il nostro
organismo, in risposta ai danni causati dalla penetrazione del microelettrodo nella corteccia
inizia un processo reattivo che altera l’impedenza iniziale del microelettrodo [16]. Danni
neurali e vascolari presso la locazione del microelettrodo possono anche portare lo sviluppo di
infezioni. Come risultato, la durata dell’impianto nel tempo si misura in mesi, e in genere non
dura più di un anno senza perdere qualità del segnale in maniera significativa. Inoltre, il
movimento del microelettrodo impiantato nel parenchima cerebrale, spesso causato da
variazioni di volume del cervello o da attività fisica, può influenzare la produzione del
segnale.
Figura 4 Classificazione dei metodi usati per il prelievo del segnale neurale [17].
4
L’effetto di deterioramento del segnale è dovuto ai processi di cicatrizzazione: minore è il danno inflitto alla
corteccia, minore è il contributo dei processi di cicatrizzazione al deterioramento del segnale
14
1.3.1 BCI dipendente e BCI indipendente
In letteratura [18] si trova un’ulteriore suddivisione, che distingue tra BCI dipendente e
indipendente. La BCI dipendente, pur non utilizzando le normali “vie di uscita” dell’encefalo
(controllo diretto muscolare o verbale) per trasportare il messaggio (o comando), ha però
bisogno dell’attività sensoriale per generare i segnali cerebrali necessari al controllo: è il caso,
ad esempio, dell’SSVEP (vedi §2.6) nella quale il soggetto viene stimolato mediante luci o
scacchiere intermittenti. Al contrario la BCI indipendente non ha bisogno di quest’attività in
quanto il cervello genera autonomamente il segnale che trasporta il messaggio da interpretare
(per esempio la motor imagery). Questo secondo caso può a prima vista sembrare il più
conveniente, ma necessita di un lungo addestramento del soggetto che, se superficiale, può
minare il corretto funzionamento dell’intero sistema.
1.4 BCI per “Unspoken Speech”
Le tipiche forme di comunicazione tra gli umani comportano il trasporto di informazione
verbale e visuale, molto spesso attraverso linguaggio vocale o gesti fisici. Individui affetti da
SLA o paralisi non possono comunicare in tal modo: alcune BCI sono state quindi sviluppate
per assicurare un metodo di comunicazione alternativo per questi individui.
Per esempio, nel 2007 è stato sviluppato un sistema di comunicazione del tipo “sì o no”
misurando l’afflusso di sangue al cervello attraverso la spettroscopia infrarossa. Tuttavia, la
lenta risposta (30s) della misura dell’afflusso di sangue al cervello fa sì che il sistema non
abbia nessuna correlazione con i normali metodi di comunicazione.
In quest’ambito, l’elettroencefalografia sta dimostrando di essere un utile strumento di
comunicazione, utilizzabile per il riconoscimento del parlato. Una risposta neuronale a
svariati stimoli chiamata potenziale P300 è stata ampiamente studiata come controller BCI.
Nel 2008 il P300 è stato utilizzato su pazienti affetti da SLA, ai quali è stata fatta osservare
una matrice lampeggiante di lettere, permettendo loro di esprimersi. Tuttavia, dato che il P300
non è una risposta volitiva (cioè richiede uno stimolo esterno), esso ha poca correlazione con i
normali metodi di comunicazione. Per esempio, nello studio presentato in [19] è descritto
come un paziente completamente paralizzato possa imparare ad utilizzare una BCI basata sui
segnali EEG per la comunicazione verbale. Ciò ha richiesto un processo di apprendimento che
è durato diversi mesi, con tempi medi di produzione di ciascuna lettera di circa un minuto.
15
Lo scopo dei nostri studi è stato quello di sviluppare un quadro di una comunicazione BCI che
impieghi un sistema di controllo più naturale, utilizzando l’attività neurale associata alla
produzione del linguaggio.
Con il termine Unspoken Speech, ossia “linguaggio non-parlato”, si intende dunque l’azione,
da parte di un soggetto, di pensare una data parola senza che ci sia movimento di muscoli
articolatori e senza emettere alcun suono udibile.
È stato dimostrato che si verificano attivazioni neurali nella corteccia motoria durante i
movimenti immaginati degli arti; queste attivazioni, come già visto, possono essere sfruttate
per controllare protesi; inoltre, è stato dimostrato che le attivazioni neurali nella corteccia
motoria avvengono durante la ripetizione mentale di vocali.
Abbiamo dunque cercato di sfruttare queste potenzialità relative al linguaggio per porre le
basi per un sistema di controllo di un sintetizzatore vocale.
In letteratura si distinguono sostanzialmente due tipi di approcci che cercano di ‘catturare’ il
segnale connesso con il parlato. Il primo sfrutta i segnali muscolari connessi alla laringe e ai
muscoli oro-facciali, attraverso la registrazione del segnale elettromiografico (EMG) [20][21];
il secondo sfrutta direttamente il segnale cerebrale connesso a specifici compiti cognitivi
attraverso l’uso del sistema EEG [22].
Dopo i primi successi iniziali [23] dei sistemi BCI implementati con i segnali EMG, sono
emerse una serie di problematiche che ne hanno evidenziato alcuni limiti importanti quali, ad
esempio, la variabilità della performance in termini di accuratezza del sistema dovuta al
posizionamento degli elettrodi. Il problema è stato evidenziato non solo tra diversi soggetti,
ma anche in più sessioni sperimentali dello stesso soggetto. Inoltre, essendo tale metodo
basato sui segnali muscolari, la sintesi del segnale EMG risulta fallimentare in soggetti
paraplegici che hanno perso l’uso della muscolatura laringale ed oro-facciale, nonostante
conservino intatta l’attività neurofisiologica e di pensiero.
Pertanto, sulla base della letteratura presa in esame, l’approccio più idoneo sembra essere
quello di decodificare il segnale EEG prodotto dalla corteccia cerebrale mentre un soggetto
pensa di produrre un suono. I primi tentativi in questa direzione risalgono a 1997 quando
Suppes et al.[24] resero nota la possibilità di rilevare i pattern neurali connessi all’atto di
pensare un set di parole ben definito attraverso registrazioni EEG. Successivamente, il gruppo
di ricerca di Tanja Schultz a Karlsruhe, in Germania [25] e altri gruppi di ricerca [26][27],
16
hanno sviluppato diversi protocolli sperimentali mirati a catturare il segnale cerebrale
connesso all’atto di pensiero di parole, ottenendo, tuttavia, per ora scarsi risultati.
Anche il prototipo BCI che la Tesi descrive segue quest’approccio. E’ però opportuno,
preliminarmente alla trattazione del sistema, introdurre alcune informazioni sulla natura e
sulle caratteristiche fisiche dei segnali EEG.
17
2 I SEGNALI ELETTROENCEFALOGRAFICI
Come già detto nel Capitolo 1, data la non invasività del metodo elettroencefalografico, la sua
facile reperibilità e il semplice utilizzo, la maggior parte delle ricerche sui sistemi BCI sono
state recentemente indirizzate verso l'analisi e l'approfondimento di questa tecnica di
registrazione.
I segnali EEG sono originati dal sommarsi di un gran numero di eventi a basso voltaggio
dell’attività elettrochimica del cervello. L’energia elettrica viaggia attraverso i tessuti
conduttivi e i fluidi cerebrali, le ossa, e la cute del cuoio capelluto, fino ad arrivare agli
elettrodi di misura che, posti sulla superficie del cranio, a contatto con la pelle, rilevano
differenze di potenziale dell’ordine di pochi µV o decine di µV.
Questi segnali possono essere rappresentati come sovrapposizione di numerose forme d’onda
generate dall’attività neurale, e portano con sé l’informazione sull’attività elettrica della zona
del cervello sottostante e vicina agli elettrodi.
2.1 Cenni di neurofisiologia
Riportiamo di seguito delle informazioni presenti in letteratura [28] per capire come
avvengono i processi di produzione dei segnali elettrici neurali e quali sono le aree del
cervello interessate.
Il neurone è il tipo cellulare che compone, insieme alle cellule gliali, il tessuto nervoso.
Grazie alle sue peculiari proprietà fisiologiche, è in grado di ricevere, integrare e trasmettere
impulsi nervosi.
Nel neurone si possono identificare quattro aree morfologiche: il nucleo (o soma), i dendriti,
l’assone e i terminali pre-sinaptici (Figura 5). I dendriti rappresentano gli “ingressi” del
neurone mentre l’assone è l’uscita. I segnali elettrici trasmessi lungo l’assone (potenziali
d’azione o spike) sono impulsivi con un’ampiezza di circa 100 mV e con una durata di circa
1 ms. Il segnale si propaga a una velocità che varia da 1 a 100 m/s. L’alta velocità di
conduzione è dovuta alla guaina mielinica.
Infine la sinapsi (o giunzione sinaptica o bottone sinaptico), dal greco "connettere", è una
struttura altamente specializzata che consente la comunicazione tra i neuroni. Attraverso la
trasmissione sinaptica, l'impulso nervoso può viaggiare da un neurone all’altro.
18
Figura 5 Schema di un neurone
Gli impulsi nervosi trasmessi dai neuroni sono di natura chimica ed elettrica. Il neurone a
riposo è polarizzato con una d.d.p. di -70 mV (potenziale di membrana a riposo).
Il flusso di cariche elettriche si trasmette poiché la membrana cellulare del neurone subisce
una modifica della propria carica elettrica: dalla situazione a riposo, la membrana assume una
carica elettrica positiva. Ciò provoca una reazione a catena e la conseguente trasmissione
dell'impulso nervoso.
La concentrazione di carica negativa (anioni proteici) è maggiore all’interno del neurone. Se,
in conseguenza di ciò che avviene sulle sinapsi, il neurone si depolarizza a valori maggiori di
circa -50mV, è generato un potenziale d’azione.
Il treno di impulsi viaggia lungo l’assone e raggiunge la regione terminale.
Gli impulsi stimolano il rilascio di neurotrasmettitori (il segnale d’uscita) e questo processo è
chiamato trasmissione sinaptica.
L’ampiezza del segnale d’uscita è determinata dall’ampiezza della depolarizzazione che, a sua
volta, dipende dal numero e dalla frequenza degli impulsi.
I neurotrasmettitori sono sostanze chimiche e ormoni, ognuno dei quali contiene un preciso
messaggio da trasmettere e possiede un ruolo specifico nella funzione cerebrale e nel
comportamento.
19
2.1.1 La corteccia cerebrale
La corteccia cerebrale (o materia grigia) è il luogo in cui risiedono i corpi cellulari dei
neuroni.
Nell'essere umano la corteccia cerebrale presenta delle circonvoluzioni. È, infatti,
notevolmente ripiegata al fine di poter contenere un’ampia superficie (pari a circa 0.5 m2)
limitando il volume del cervello. Le pieghe più profonde prendono il nome di scissure. Nella
corteccia umana ci sono quattro scissure, due laterali e due centrali, che rappresentano i punti
di riferimento principali della corteccia umana. Attraverso queste scissure possiamo
individuare quattro lobi (Figura 6):
il lobo frontale
il lobo parietale
il lobo temporale
il lobo occipitale.
La parte anteriore del lobo frontale è denominata corteccia prefrontale. Nei mammiferi il
90% della corteccia cerebrale prende il nome di neocorteccia. Si tratta della parte di corteccia
più recente dal punto di vista evolutivo ed è caratterizzata da 6 strati. Il 10% rimanente è dato
dalla corteccia olfattiva e dall'ippocampo. Queste due parti sono definite anche
paleocorteccia per la loro origine più antica. È sicuramente degno di nota il fatto che nella
maggior parte dei pesci, dei rettili e degli uccelli la corteccia olfattiva occupi quasi del tutto la
corteccia cerebrale. Ogni lobo è sede di funzioni localizzate individuabili nella superficie
cerebrale e denominate aree corticali.
È possibile individuare 12 distinte regioni corticali e le loro principali funzioni:
corteccia prefrontale: emozioni e risoluzione di problemi
corteccia motoria associativa: coordinazione dei movimenti complessi
corteccia motoria primaria: inizio movimenti volontari
corteccia somatosensitiva primaria: riconoscimento informazioni sensitive
corteccia sensitiva associativa: elaborazione informazioni sensitive
corteccia visiva associativa: elaborazione delle informazioni visive
corteccia visiva: riconoscimento di stimoli visivi semplici
area di Wernicke: comprensione del linguaggio
corteccia uditiva associativa: elaborazione delle informazioni uditive
corteccia uditiva: riconoscimento delle qualità dei suoni (volume, tono)
20
corteccia inferotemporale: elaborazioni legate alla memoria
area di Broca: produzione del linguaggio
Il concetto di localizzazione delle funzioni non significa che una funzione sia svolta
esclusivamente da una determinata area, dato che la maggior parte delle funzioni sono
espletate da neuroni di regioni cerebrali diverse. Semplicemente, certe aree hanno una più
stretta relazione con determinate funzioni rispetto ad altre.
Dunque ogni area è deputata a svolgere principalmente una certa funzione. Aree diverse sono
connesse tra loro attraverso le cortecce associative. Esse ricevono informazioni dalle aree
sensoriali e fanno sì che abbiano luogo le funzioni cerebrali più elevate come la percezione, il
pensiero, il linguaggio, la memoria e il comportamento emozionale.
Figura 6 Anatomia dell’encefalo.
2.2 La Fisica dei segnali EEG
L’attivazione elettrica dei neuroni è rappresentata dal potenziale d’azione, che è la differenza
di potenziale tra l’interno e l’esterno della cellula: lo scambio di ioni provoca una rapida
variazione del potenziale della durata complessiva di qualche millisecondo.
L’ampiezza del potenziale raggiunge decine di mV. Ogni neurone produce questo tipo di
potenziale durante la sua attività, tuttavia un gruppo di neuroni che effettua uno stesso
compito non lavora necessariamente in fase, e quindi ciò che è registrato da un
elettroencefalografo è solo l’attività dei neuroni che in quell’istante producono una somma
non nulla dei loro potenziali d’azione. Il problema bioelettromagnetico consiste nel costruire
un modello fisico che descriva l’attività elettrica del cervello.
21
Una volta descritte le sorgenti del campo e dello spazio, si possono risolvere le equazioni di
Maxwell per ricavare un espressione analitica o numerica per il potenziale registrato
nell’EEG.
La soluzione del problema diretto (date le sorgenti, trovare il potenziale, Figura 7) è
necessaria per l’impostazione di quello inverso, ovvero, date le misure dello scalpo, fornire un
mappa di attivazione cerebrale, che è spesso utile durante la realizzazioni di sistemi BCI, per
capire quali zone del cervello sono interessate (ovvero hanno un maggiore attivazione)
durante lo svolgimento di diversi compiti.
Figura 7 Schema rappresentativo del problema diretto (a) dove, partendo dalle sorgenti, si calcola una mappa
del potenziale; inverso (b) ovvero partendo dalle misure di potenziale si localizzano le sorgenti all’interno del
volume cerebrale.
2.2.1 Il problema diretto
Potendo rappresentare una qualsiasi distribuzione di sorgenti di campo elettromagnetico come
un’espansione in termini di multipoli, il primo ordine dell’espansione per una densità di
22
corrente sarà rappresentato dal dipolo di corrente , che può essere rappresentato da un
vettore che punta nella direzione della corrente.
Ogni neurone piramidale presente nella corteccia è rappresentato da un dipolo di corrente
variabile in modulo nel tempo ma con direzione fissata, parallela a quella dell’assone.
Come mostrato in Figura 8, i neuroni piramidali sono disposti parallelamente e i loro campi
elettromagnetici si possono sommare se attivati simultaneamente, mentre i neuroni non
piramidali sono disposti radialmente e i loro campi elettromagnetici non possono essere
registrati dall’esterno in quanto tendono a dare somma nulla.
Figura 8 La figura mostra il modo in cui si sommano i campi elettromagnetici prodotti da neuroni piramidali
(sinistra) e neuroni non-piramidali (destra).
Si usa suddividere idealmente il tessuto cerebrale in n elementi di volume sufficientemente
piccolo vi e rappresentare la sorgente dei segnali EEG come somma vettoriale dei dipoli
varia istante per
contenuti all’interno di ciascun elemento di volume. Il dipolo somma istante in modulo e direzione, a causa della complessità delle strutture e dei processi cerebrali.
La densità di corrente sarà rappresentata da:
, (2.1)
23
Dove rappresenta la posizione dell’elemento vi in un opportuno sistema di riferimento. La
funzione δ(x) di Dirac permetterà di discretizzare correttamente il problema, ossia di passare
da un volume continuo ad un volume suddiviso in elementi discreti.
La densità di corrente è diversa da zero solo all’interno del volume Ω che rappresenta la
testa, e la distribuzione di potenziale da essa generata sulla superficie di Ω dà luogo all’EEG.
Formalmente ogni è funzione del tempo ma, come spiegato in seguito, per la descrizione
del problema si utilizza un’approssimazione quasi-statica delle equazioni di Maxwell, e
quindi d’ora in avanti con e si intende e , dove t0 è l’istante di tempo in cui
si vuole stimare il potenziale.
Definite le sorgenti, è utile ricavare l’espressione del potenziale elettrico in un mezzo
omogeneo e infinito di conducibilità costante e isotropa σ. In questo modo è possibile studiare
la dipendenza di V dalla posizione dei dipoli.
Come primo passo si definisce all’interno dello spazio infinito la conducibilità σ in una
regione Ω, che potremo assumere sferica, in cui è diversa da zero.
A questo punto si considera la quarta equazione di Maxwell:
+
∇×
1 (2.2)
In cui è costituita da due componenti: le sorgenti reali e le correnti indotte dai campi
generati da ! :
+ ! (2.3)
Normalmente le frequenze di interesse nell’EEG sono inferiori a 1 kHz; in questo range di
frequenze è possibile trascurare gli effetti capacitivi delle membrane cellulari, e quindi
trascurare il tempo che impiegano le cariche per distribuirsi sui bordi delle membrane dei vari
tessuti.
Per capire l’ordine di grandezza di questi tempi caratteristici si può notare che considerando
l’equazione di continuità della densità di corrente, e combinandola con la legge di Gauss in
una regione di conducibilità costante, si trova che la densità di carica decresce
esponenzialmente nel tempo
&
" ∝ $ %'
(2.4)
con τ = ε/σ; per il tessuto medio presente nell’encefalo (cranio compreso) si ottiene un valore
di τ ~ 1.8 ×10-9s. Siccome le frequenze di interesse in elettroencefalografia sono tali che
ωτ << 1, è possibile considerare valida l’approssimazione quasi statica.
24
L’approssimazione implica la continuità della corrente attraverso le superfici. Eliminando il
termine di derivata temporale del campo elettrico nella (2.2) e prendendo la divergenza di
entrambi i membri si ottiene:
0 ∇* + ! +
∇∙∇×
(2.5)
L’approssimazione quasi statica consente di eliminare il termine del potenziale vettore
dall’espressione del campo elettrico in funzione dei potenziali di campo, e quindi di utilizzare
la semplice relazione:
∇,
(2.6)
Inserendola nella (2.5) si ottiene l’equazione differenziale alle derivate parziali che descrive
completamente il problema:
∇ ∙ σ∇, ∇ ∙ ./Ω
(2.7)
Questa è un’equazione del secondo ordine, e la soluzione analitica o numerica per i diversi
modelli di Ω (il modello relativo al volume della testa, che per esempio in prima
approssimazione può essere considerato una sfera) fornirà la soluzione del problema
elettromagnetico diretto.
Ricaviamo, per semplicità, l’espressione del potenziale elettrico nello spazio infinito di
conducibilità costante σ in cui abbiamo scritto le equazioni precedenti.
In questo spazio, avendo identificato σ come una costante, l’equazione (2.7) diventa:
1, e, inserendo l’espressione di , si ottiene:
1
∇ ∙ σ
(2.8)
1, 2 ∙ ∑ ∇
4 .
(2.9)
1
7 49
|
|
(2.10)
Utilizzando la relazione
∇ 5
ed imponendo le condizioni al contorno V(∞) = 0 si ottiene
1
∙ ,: |
|;
49!
2
(2.11)
La dipendenza dalla distanza 1/r è caratteristica del dipolo; la complessità dei vari modelli di
Ω modificherà l’espressione del potenziale, tuttavia la dipendenza con l’inverso del quadrato
della distanza sarà comunque conservata.
25
2.2.2 Il problema inverso
Il problema inverso consiste nel risalire alla distribuzione di corrente che ha generato le
misure sullo scalpo, date quest’ultime. Tra i diversi approcci che portano alla soluzione del
problema inverso, vi sono i metodi derivanti da una regolarizzazione classica di tipo Tikhonov
[29] che generano una distribuzione spaziale di possibili sorgenti. Per questo motivo sono noti
anche come metodi distribuiti.
Dal punto di vista fisico, sono effettuate misure di una data distribuzione di potenziale sulla
superficie di un volume Ω. A partire da queste misure si vorrebbe ottenere la distribuzione
spaziale delle sorgenti che ha generato il potenziale misurato. Poiché il numero delle
incognite è infinito, nella pratica è opportuno discretizzare il volume Ω che corrisponde alla
corteccia cerebrale. Questo vincolo geometrico/fisiologico permette di restringere lo spazio
delle possibili soluzioni ad un numero finito di punti m. Questo numero rappresenta le
possibili posizioni all’interno di Ω in cui possono essere presenti dipoli di corrente. Per una
corretta modellizzazione della corteccia cerebrale, il numero m deve essere maggiore di due o
tre ordini di grandezza rispetto a nε (numero di elettrodi).
Il problema è costituito da un numero di incognite superiore al numero di equazioni, per cui è
necessaria una regolarizzazione per raggiungere una soluzione approssimata.
In primo luogo consideriamo la relazione lineare tra il potenziale misurato e le sorgenti,
questa relazione può essere espressa in forma algebrica come:
⋅ J
,<
(2.12)
dove, ∈ ℝℰ , rappresenta il vettore delle misure di potenziale elettrico, ∈ ℝB è il vettore
∈ ℝℰ ×B , detta Lead field matrix, è la matrice rettangolare che
contenente le sorgenti, e <
rappresenta la relazione tra il potenziale sugli elettrodi e le sorgenti.
La regolarizzazione del problema passa attraverso la minimizzazione di un funzionale
quadratico. Essa fornirà una stima della distribuzione delle sorgenti C che si cercherà quanto
più possibile simile a quella reale. Si definisce a questo scopo il funzionale D*C, E+:
⋅ F + EFCF
D*C, E+ F, <
(2.13)
Il primo termine di f mantiene minimo lo scarto quadratico delle misure V dall’incognita C
attraverso la relazione (2.12), mentre il secondo termine rende minima l’energia della
soluzione. Il parametro λ deve essere stimato in maniera indipendente e il suo valore
condiziona la qualità delle soluzioni. Con qualche semplice passaggio di analisi multivariata è
possibile ottenere la soluzione:
26
M
,H/G
I<
J <
+ EKL <
J
C G
(2.14)
Dove l’apice + indica la pseudo inversa di Moore Penrose5 Questa soluzione tuttavia è poco
utilizzabile nella pratica, poiché la dimensione della matrici in gioco fanno sì che il calcolo
effettivo della soluzione espressa in questo modo comporti un enorme dispendio di tempo di
calcolo e di memoria.
che
Tuttavia è possibile dimostrare tramite decomposizione a valori singolari della matrice <
è equivalente a:
la matrice G
<
J I<
<
J + EKL
G
M
(2.15)
<
J sono nε × nε, riducendo il numero di elementi fino a sei
dove questa volta l’identità K e <
ordini di grandezza.
Questa soluzione è nota come norma minima, a causa del secondo termine del funzionale f
che tiene minima la norma delle soluzioni. Tuttavia è stato dimostrato che le soluzioni
ottenute con questo metodo sono incapaci di localizzare sorgenti profonde.
Per ovviare a questo problema il funzionale (2.13) può essere generalizzato introducendo la
nello spazio delle C. La matrice simmetrica e definita positiva N
ha lo scopo di
norma N
fornire un modo per pesare le soluzioni:
⋅ F + ECJ N
C
D*C, E+ F, <
(2.16)
con soluzione:
,H/G
N
% <
J I<
N
% <
J + EKL
C G
M
(2.17)
K si ottiene la (2.15). Pesando gli elementi diagonali con la norma delle
Ponendo N
colonne della Lead field matrix, è possibile compensare l’effetto dell’andamento 1/r2 del
potenziale:
OO%
N
P
<O H/Q 1, … , S
(2.18)
In questo modo nella soluzione sorgenti lontane dagli elettrodi hanno un peso più grande di
quelle superficiali.
La modellizzazione dell’attività corticale elettrica con dei dipoli equivalenti non è sempre
affidabile e accurata nella stima della soluzione del problema inverso. Data la scarsa
risoluzione spaziale che caratterizza l’EEG convenzionale, il problema inverso risulta essere
5
Generalizzazione della matrice inversa per una matrice A non quadrata con A+ = (ATA)-1AT
27
un problema con infinite soluzioni, cioè si possono trovare infinite distribuzioni di cariche
dipolari che spiegano un certo campo superficiale misurato con alcune decine di elettrodi. Ad
esempio, una tipica distribuzione elettrica prodotta dall’attività di un’area corticale all’interno
di un solco cerebrale può essere dovuta ad un singolo dipolo tangente, ma anche a due dipoli
disposti radialmente e opposti come orientamento (Figura 9).
È anche possibile che i dipoli che meglio approssimano i pattern spaziali dell’EEG, non
abbiano nessuna relazione con le sorgenti autentiche che le generano: ciò accade in genere per
i tessuti profondi, quando le sorgenti che occupano la superficie corticale ricoprono vaste aree
che vanno da pochi a centinaia di centimetri quadrati.
Figura 9 Distribuzione del campo elettrico (in alto) prodotto da due aree corticali con orientamento radiale (a
sinistra) e tangente (a destra). La freccia indica l’orientazione del dipolo rispetto all’elettrodo che rileva il
campo elettrico.
2.3 Acquisizione del segnale EEG
La registrazione del segnale EEG avviene in maniera non invasiva attraverso l’uso di piccoli
elettrodi usualmente costituiti da placche di Ag rivestite elettroliticamente da AgCl. Tali
elettrodi vengono posti sul cuoio capelluto a contatto con la pelle (opportunamente sgrassata).
A volte, per evitare che gli elettrodi si stacchino o per maggiore comodità, essi sono sostituiti
da una cuffia elasticizzata con elettrodi già posizionati.
Il potenziale rilevato va generalmente da pochi a 150 µV, per cui si rende necessario
l’impiego di amplificatori di alto guadagno e particolarmente insensibili al rumore.
In Figura 10 è possibile osservare uno schema a blocchi per un sistema di acquisizione EEG.
28
Figura 10 Schema a blocchi di un sistema di acquisizione dei segnali EEG
2.3.1 Gli elettrodi
Gli elettrodi sono dei conduttori metallici attraversi i quali i potenziali prelevati dallo scalpo
sono trasferiti agli amplificatori per la successiva registrazione.
È necessario un elemento conduttore come pasta conduttrice o fluido fisiologico per trasferire
i potenziali fisiologici agli elettrodi EEG.
L’interfaccia pelle-elettrolita-elettrodo forma il primo e, sotto molto punti di vista, il più
importante collegamento per una fedele acquisizione del potenziale rilevato dallo scalpo.
Quando un elettrodo è messo a contatto con l’elettrolita, avvengono delle variazioni
elettrochimiche nell’immediata vicinanza dell’elettrodo stesso con migrazione ionica dalla
superficie dell’elettrodo nella soluzione e viceversa.
Queste migrazioni avvengono con diverse velocità e il risultato è una distribuzione locale di
carica descrivibile come un doppio strato elettrico nel quale c’è predominanza di una carica
sulla superficie metallica e della carica opposta sulla superficie dell’elettrolita ad esso
adiacente.
Il comportamento elettrico di questo doppio strato è assimilabile a quello di un condensatore e
di un resistore connessi in parallelo tra loro e ad una batteria.
I valori di questi componenti non sono costanti e dipendono da variabili come il tipo di
metallo dell’elettrodo, la natura, concentrazione e temperatura dell’elettrolita, nonché la
frequenza e la densità della corrente che fluisce in essi. L’interfaccia pelle-elettrolita presenta
anch’essa una superficie avente elementi capacitivi e resistivi.
29
Una conseguenza del doppio strato elettrico è la differenza di potenziale nota come potenziale
di mezza-cella che esiste tra un elettrodo e l’elettrolita con cui esso viene a contatto.
Differenze di ampiezza di questi potenziali (potenziali di polarizzazione) possono verificarsi a
causa di impurità nella sostanza metallica o a causa della contaminazione della superficie.
Essendo i potenziali di polarizzazione dello stesso ordine di grandezza dei potenziali esistenti
nel cervello, e bene minimizzarli usando elettrodi di buona qualità e ben puliti.
2.3.2 Montaggio degli elettrodi
Al fine di garantire la copertura di tutte le aree corticali, durante l’acquisizione dei segnali
EEG, gli elettrodi vengono applicati sullo scalpo secondo il posizionamento standard
chiamato "sistema internazionale 10-20" [30].
Questo sistema descrive l’esatta posizione di ogni elettrodo, consentendo una buona copertura
di tutta la superficie encefalica e garantendo che gli elettrodi siano sempre posizionati sopra le
stesse aree (riproducibilità della configurazione degli elettrodi). Le posizioni dei sensori sono
misurate su delle linee, utilizzando come punto di partenza precise localizzazioni anatomiche.
10% oppure 20% si riferisce alla distanza tra due punti di riferimento cranici (Figura 11):
I: inion, prominenza alla base dell'osso occipitale
N: nasion, attaccatura superiore del naso
Questa distanza di solito va da 30 a 36 cm con grande variabilità interpersonale.
Vengono collocati da 10 a 20 elettrodi e una massa, lungo cinque linee:
-
P1 longitudinale esterna (Figura 11a- linea gialla)
-
P2 longitudinale interna di destra(Figura 11b – linea blu)
-
Longitudinale centrale (Figura 11b – linea viola)
-
P1 longitudinale esterna (Figura 11a - linea gialla)
-
P2 longitudinale interna di sinistra (Figura 11b – linea verde)
La linea trasversa T4-C4-Cz-C3-T3, risultante delle precedenti, (Figura 11b – linea rossa) è
denominata
“montaggio P3”,
ed
anch'essa
segue
la
regola
del
10-20%.
Gli elettrodi fronto-polari sono collocati al 10% (3-4 cm) della distanza I-N, sopra le
sopracciglia, i frontali vengono collocati sulla stessa linea dei fronto-polari, più sopra del
20%, poi vengono i centrali (+ 20%), infine i parietali (+ 20%) e gli occipitali (+ 20%); con
questi si arriva al 90% della distanza nasion-inion, ad una distanza del 10% dall'inion.
Come si vede in figura, alla posizione che ogni elettrodo occupa sullo scalpo fa riferimento
una sigla. Le sigle che individuano la posizione di un elettrodo sono formate da una/due
lettere, che permettono di identificare la regione della corteccia esplorata (FP: fronto-polare;
30
F: frontale; C: centrale; P: parietale; T: temporale; O: occipitale) e da un numero (o una z) che
identifica l’emisfero (numeri dispari: sinistra; numeri pari: destra; z: linea mediana).
P3
P1
P2
P2
Figura 11 Posizionamento elettrodi nel “Sistema Internazionale 10-20”
Come vedremo nel prossimo paragrafo, i segnali cerebrali prelevati sullo scalpo vengono
inviati, mediante gli elettrodi, ad amplificatori, ognuno dei quali ha due ingressi, uno
invertente (–) e l’altro non invertente (+).Pertanto gli elettrodi vengono utilizzati a coppie (un
elettrodo di riferimento e uno per il prelievo del segnale).
Esistono quattro tipi di prelievo:
•
unipolare (o monopolare)
•
bipolare
•
di media referenziale
•
laplaciano
Nel primo tipo (Figura 12a), per ogni coppia di elettrodi, uno è posto su un’area
elettricamente attiva ed è collegato al morsetto (+) dell’amplificatore, l’altro su un’area
relativamente inattiva (che coincide con il punto di massa utilizzato dall’amplificatore) ed è
un ingresso comune per tutti gli amplificatori (è collegato al morsetto (–)).
31
Il prelievo unipolare, che è in genere il più utilizzato, consente la registrazione di segnali
generati nelle strutture più profonde del cervello.
Nel prelievo bipolare (Figura 12b) entrambi gli elettrodi di ogni coppia sono posti su regioni
dello scalpo considerate elettricamente “attive”: il segnale registrato è quello proveniente
dagli strati esterni della corteccia cerebrale, in quanto i potenziali generati da sorgenti più
profonde vengono considerati di modo comune dall’amplificatore differenziale. In generale la
registrazione bipolare dà risultati più localizzati di quella unipolare ed è per questo più
diffusa.
Altri due metodi, il montaggio di media referenziale e il montaggio kaplaciano, sono usati
meno frequentemente; nel primo, tutti i segnali EEG amplificati dal dispositivo sono sommati
e la loro media è utilizzata come riferimento di massa comune per ogni canale; il secondo
invece misura la differenza di potenziale tra un elettrodo e la media (pesata con la distanza)
dei potenziali degli elettrodi circostanti (elettrodi di surrounding).
Figura 12 Le due più diffuse tipologie di montaggio degli elettrodi: il cavo A corrisponde all’elettrodo per
l’acquisizione, il cavo R rappresenta l’elettrodo di riferimento e G quello di massa.
2.3.3 Amplificazione
Questo stadio serve per amplificare i segnali elettrici provenienti dagli elettrodi, usualmente
piuttosto deboli (decine di µV).
In questo processo è utilizzato un particolare tipo di amplificatore detto amplificatore per
strumentazione (Figura 13). Esso è realizzato sul modello di un amplificatore differenziale
(Figura 14) e presenta le seguenti caratteristiche:
-
amplificazione con ingresso differenziale
-
guadagno elevato e noto con precisione
32
-
elevata impedenza di ingresso
-
bassissima tensione e corrente di offset
-
stabile in temperatura
-
buona risposta in frequenza
La sua elevata sensibilità lo rende naturalmente soggetto al rumore.
Figura 13 Amplificatore per strumentazione
Il circuito in figura si ottiene dalla configurazione differenziale aggiungendo due circuiti
inseguitori di tensione all’ingresso, il compito degli inseguitori di tensione è disaccoppiare la
sorgente del segnale con il resto del circuito evitando problemi di adattamento di impedenza.
Per mostrare il principio di funzionamento di un amplificatore per strumentazione, faremo
quindi riferimento, per semplicità, proprio ad un amplificatore differenziale quale quello
contenuto in un amplificatore operazionale.
Un amplificatore differenziale è progettato per fornire in uscita un segnale pari alla differenza
amplificata dei segnali ai suoi ingressi (Figura 14).
Figura 14 Amplificatore differenziale.
In riferimento alla figura, v1 e v2 sono le tensioni applicate ai due ingressi + e – (ingresso noninvertente e ingresso invertente rispettivamente), e v0 è la tensione in uscita:
T UV T T (2.19)
33
Dove Ad è il guadagno differenziale. Questo dispositivo è utilizzato per amplificare (ed
eventualmente misurare) la differenza di potenziale tra due punti di un circuito (nel nostro
caso tra due punti dello scalpo). L’amplificatore differenziale, e soprattutto quello
espressamente progettato per la strumentazione, è utilizzato per la misurazione di segnali di
debole entità.
Le interferenze elettromagnetiche che si propagano nello spazio, come quelle dovute alla
circolazione della corrente alternata di alimentazione o provenienti da vari dispositivi
elettronici in funzione, influenzano in maniera uguale i segnali catturati dagli elettrodi
(distanti uno dall’altro pochi centimetri) e quindi l’amplificatore elimina gli effetti di disturbi
comuni ai due ingressi. Infatti, se tra v1 e massa, e tra v2 e massa, vengono iniettati due segnali
di uguale tensione, ad esempio due onde sinusoidali a 50Hz con la stessa fase e ampiezza,
qualsiasi sia il valore del guadagno differenziale, la tensione in uscita, secondo la (2.19), è 0.
Questa particolare caratteristica permette di migliorare la qualità del segnale amplificato
eliminando le interferenze elettromagnetiche comuni ai due ingressi. Il segnale di modo
comune, ossia comune ai due ingressi, è definito come:
,WB T +T
2
(2.20)
L’insensibilità dell’amplificatore alla componente comune ai due ingressi, viene definita
come rapporto di reiezione di modo comune, noto con l’acronimo di CMRR (Common Mode
Rejection Ratio) dato dalla seguente formula espressa anche in forma logaritmica:
\
YZ[[ \ ]
(2.21)
^_
UV
YZ[[V` 20 log d
d
UWB
(2.22)
Dove Ad e Acm sono rispettivamente l’amplificazione di modo differenziale e di modo comune.
Il CMRR è inversamente proporzionale all’amplificazione di modo comune, quindi minore è
l’amplificazione dei segnali comuni ai due ingressi e minore è il livello di interferenza sul
segnale di interesse.
Le considerazioni fatte in precedenza valgono per un sistema ideale; nel caso in un sistema
reale, le formule restano invariate, ma sono soggette a fattori di dipendenza dai materiali e dai
metodi di costruzione dei componenti, che limitano i valori del CMRR effettivamente
ottenibili.
Un CMRRdB molto alto è un parametro fondamentale per la scelta di un amplificatore per la
realizzazione di una BCI.
34
2.3.4 AC-Coupler
In quasi tutti i moderni sistemi per la registrazione dei segnali elettroencefalografici, subito
dopo l’amplificazione per strumentazione troviamo un filtro passa alto con una frequenza di
taglio di circa 0,3Hz (variabile a seconda delle configurazioni); questo filtro elimina la
possibile componente continua (o quasi continua) portata nel segnale dalla polarizzazione
degli elettrodi (realizzando quindi un accoppiamento AC, ossia in corrente alternata).
Eliminando la componente continua del segnale, si evita che venga via via amplificata negli
stadi successivi. Gli amplificatori per strumentazione integrati dispongono di un ingresso di
riferimento che permette, ad un circuito di feedback, di eliminare la componente continua in
uscita dall’amplificatore sottraendola dal segnale di ingresso.
Come accenneremo nel Capitolo 3, diverse tecniche di trattamento dati richiedono che non vi
sia nei segnali alcuna componente continua, di modo che ciascun segnale abbia media nulla.
2.3.5 Filtri
Dopo questa fase iniziale di amplificazione, i segnali attraversano un filtro passa basso
(frequenza di taglio a circa 100Hz, modificabile secondo l’uso) per eliminare le frequenze
indesiderate al di sopra delle frequenze EEG. In alcuni dispositivi è integrato un filtro notch, o
elimina banda, che, se impostato ad una frequenza centrale di 50/60Hz, riduce i disturbi
provenienti dalla corrente alternata delle linee elettriche di alimentazione.
I filtri passa basso sono utilizzati anche per evitare effetti di aliasing nella fase di
campionamento del segnale (paragrafo seguente). L'aliasing è un effetto indesiderato che si
verifica quando nel segnale da campionare (§2.3.6) sono presenti frequenze superiori alla
metà della frequenza di campionamento. Infatti il teorema di Nyquist stabilisce che è possibile
campionare senza errori un segnale avente larghezza di banda finita B utilizzando una
frequenza di campionamento almeno due volte superiore alla larghezza di banda del segnale
(frequenza di Nyquist). Nell'eventualità di componenti a frequenze superiori a quella di
Nyquist si avrà il così detto effetto di aliasing, nel quale le frequenze che superano la banda
massima danno luogo a segnali ricostruiti erroneamente (Figura 15).
35
Figura 15 Aliasing
2.3.6 Campionamento
L'ultimo processo che deve attraversare un segnale analogico per essere elaborato da un
computer è il campionamento, effettuato da un convertitore analogico/digitale (ADC). Ad una
determinata frequenza (sampling rate), i segnali in ingresso all'ADC vengono letti e
quantizzati ad un dato numero di bit, formando una sequenza discreta di valori estratti dal
segnale continuo in ingresso, facilmente interpretabile da un computer o da un
microcontrollore (processore con ridotte funzionalità e prestazioni). Come detto nel paragrafo
precedente, bisogna evitare effetti indesiderati come l’aliasing, rispettando la regola che
impone una frequenza minima di campionamento due volte superiore alla larghezza di banda
del segnale da campionare (nel caso di un segnale EEG la larghezza di banda è circa 40Hz).
In genere, però, si preferisce utilizzare un rapporto tra frequenza di campionamento e
larghezza di banda di 4:1 [31]. Quindi se per esempio intendiamo analizzare una banda con
frequenza massima di 32Hz, avremo bisogno di un campionamento a 32 × 4 = 128 campioni
al secondo. La qualità del segnale digitalizzato dipende principalmente dalla risoluzione di
quantizzazione (cioè dal numero di bit utilizzati per rappresentare un valore di tensione) e
dalla frequenza di campionamento come descritto in precedenza. Per spiegare come la
quantizzazione influisce sulla qualità, esporremo un esempio. Poniamo che i segnali EEG
amplificati arrivino al convertitore analogico/digitale con livelli di tensione tra 0 e 5V;con una
quantizzazione a n = 8 bit avremo una risoluzione del segnale pari a:
.eHfgh.H/$ i/j$k../j
$eeH 5,
m n 20ST
2
2
(2.23)
Questo sta a indicare che, con i dati sopra riportati, avremo un valore discreto ogni 20mV
rilevati. Se aumentiamo la quantizzazione a 16 o a 24 bit noteremo che la risoluzione totale
aumenterà; dividendo la tensione in ingresso per216 o 224,otteniamo:
.eHfgh.H/$i16p. 5,
n 76,
2q
(2.24)
36
.eHfgh.H/$i24p. 5,
n 0,3,
2s
(2.25)
Quindi maggiore è la quantizzazione (bit adoperati), migliore è la risoluzione. Ricordando che
le tensioni rilevate dagli elettrodi sono dell'ordine di alcune decine di µV, e tenendo presente
che i segnali che arrivano al convertitore ADC sono già amplificati, 16 bit possono essere
considerati più che sufficienti: se, ad esempio, il segnale viene amplificato 1000 volte, con
una risoluzione di 16 bit otteniamo un valore discreto ogni 0,07µV del segnale originale.
Nella scelta del valore di quantizzazione bisogna inoltre tener conto del possibile rumore
introdotto con essa: come spiegato in Linnenbank [32] il campionamento introduce rumore,
che può essere approssimato da un rumore gaussiano. Nella progettazione di un ADC per
segnali biologici bisogna tener conto del rapporto segnale-rumore a basse frequenze. In [32],
è proposto un metodo per calcolare il numero di bit necessari per una buona quantizzazione
sostanzialmente priva errori:
log u
,vwxy
,vwxy
| + 1 ≥ ~{ ≥ log u
|
,z{y,vB{
3 ⋅ ,z{y,vB{
(2.26)
dove Vrange è il valore di tensione massimo all'ingresso del convertitore e Vnoise,rms è il valore
rms di tensione del rumore dell'amplificatore.
Dopo il campionamento, il segnale è trasmesso ad un computer o ad un altro dispositivo
hardware/software per l'elaborazione.
2.4 Tracciato EEG
In generale, il comportamento dinamico dell’attività elettrica cerebrale può essere diviso in
due principali categorie: i potenziali spontanei EEG, di cui parliamo in questo paragrafo, e i
potenziali evocati o potenziali evento correlati, che saranno discussi nel prossimo.
I potenziali spontanei EEG hanno una natura oscillatoria. In generale, nell'uomo in buona
salute, l'ampiezza dei potenziali elettrici registrati sullo scalpo varia da 20 a 100 µV, e viene
distinta in bassa (< 30µV), media (30-70µV) e alta (>70µV). Le oscillazioni EEG hanno
frequenze che variano da 1 a circa 60 Hz. Circa il 90 % del segnale EEG sembra altamente
casuale. Questi segmenti spesso non sono riconducibili a particolari stati mentali, sono
difficilmente interpretabili e di solito sono considerati attività di fondo o rumore.
L’attività elettrica corticale presenta oscillazioni diversamente caratterizzate da ampiezza e
frequenza e indicate con il termine di ritmi. L’ampiezza del segnale EEG dipende soprattutto
dal grado di sincronia col quale i neuroni corticali interagiscono, L’eccitazione asincrona di
un gruppo di neuroni genera un segnale EEG irregolare e con oscillazioni di bassa ampiezza.
37
Un’eccitazione sincrona, invece, produce un segnale di grande ampiezza dovuto alla somma
dei singoli contributi elettrici. I tracciati EEG sono caratterizzati da fluttuazioni di voltaggio
spontanee associabili a diversi stati mentali, di livelli di coscienza o disturbi patologici [33]. I
ritmi con alta frequenza e bassa ampiezza riflettono attività cerebrali associate allo stato di
sogno o di allerta, mentre ritmi con bassa frequenza e maggiore ampiezza si registrano
durante lo stato di sonno profondo. Infatti, quando la corteccia è attivamente occupata nel
processamento di informazioni, o nella generazione di input sensoriali come avviene nello
stato di allerta, il livello di attività neuronale è relativamente alto ma anche asincrono, perché
ogni singolo neurone, o piccolo gruppo di neuroni, è occupato in uno specifico aspetto
dell’attività mentale e si attiva rapidamente ma con poca sincronia rispetto ai neuroni
adiacenti. Durante lo stato di sonno profondo, invece, un gran numero di neuroni corticali,
non essendo occupati in un’intensa elaborazione di informazioni, viene eccitato in fase,
generando una risposta altamente sincrona e producendo così un segnale EEG dotato di
maggiore ampiezza.
Le oscillazioni appartengono a caratteristiche bande di frequenza (Tabella 1), hanno
specifiche distribuzioni spaziali, e sono associate a differenti stati cerebro-funzionali. I ritmi
dell’EEG sono classificati in ritmo δ, θ, α, β, µ e γ. Il ritmo delta (δ) ha oscillazioni a
frequenze inferiori a 4Hz; tipicamente non è presente in condizioni fisiologiche normali ed è
pertanto associato a stati patologici. Il ritmo theta (θ) presenta oscillazioni nella banda 4-7Hz
ed è presente durante gli stati di sonno profondo. Il ritmo alfa (α) è caratterizzato da
oscillazioni nella banda 8-13Hz, ha un’ampiezza media di 30µV e viene registrato in un
soggetto sveglio ad occhi chiusi; viene tipicamente correlato a stati di rilassamento mentale. Il
ritmo beta (β) è molto veloce, con frequenza 14-30Hz. Ha ampiezza piccola (1-20µV) ed è
associato a livelli di coscienza come l’attenzione e la concentrazione. Il ritmo mu (µ), 812Hz,è presente solo in alcuni soggetti e solamente in stato di veglia e/o quando il soggetto
non si sta concentrando su alcuna attività motoria o sensoriale. Infine, il ritmo gamma (γ) ha
frequenza superiore a 30Hz e piccola ampiezza; è legato a stati di elaborazione attiva delle
informazioni della corteccia ed è tipicamente osservato durante il movimento delle dita.
38
Tipo
Freq. (Hz)
Delta
inferiori a 4
Theta
Ampiezza (µV)
Locazione
Stato mentale
fino a 200
tutto l’encefalo
stato patologico
da 4 a 7
fino a 100
temporale/parietale
sonno profondo
Alfa
da 8 a 13
30
occipitale/parietale
rilassamento
Beta
da14 a 30
1-20
parietale frontale
concentrazione
Mu
da 8 a 12
fino a 80
corteccia motoria
veglia
Gamma
superiori a 30
fino a 10
tutto l’encefalo
elaborazione delle
informazioni
Tabella 1I ritmi cerebrali e loro caratteristiche.
2.5 I potenziali evocati evento-correlati (ERP)
L’EEG, come visto, esprime l’attività elettrica spontanea, cioè non dovuta ad un particolare
evento; è possibile registrare attività cerebrale anche in risposta ad uno stimolo esterno, che
attivi il talamo e i circuiti corticali. Questo tipo di attività è detta potenziale evocato: a
qualsiasi stimolazione sensoriale esterna, il cervello risponde con un’onda specifica,
caratterizzata da una particolare latenza, ampiezza e polarità.
Figura 16 Esempio di ERP
Un dato potenziale evocato compare ad intervalli di tempo approssimativamente costanti dalla
presentazione dello stimolo e, poiché l’ampiezza di una singola risposta è piccola rispetto alle
fluttuazioni dell’ampiezza dell’intero EEG, dal tracciato viene estratta la risposta media di
una serie di risposte singole (averaging), in modo da elidere le fluttuazioni casuali dell’EEG.
Le variazioni del potenziale che non sono sincronizzate con lo stimolo, cioè, si cancellano,
mentre quelle sincronizzate si sommano (a ovvia condizione che siano in fase).
39
L’onda evocata media si evidenzia così, nettamente, sullo sfondo di attività elettrica continua
e si caratterizza, da un punto di vista morfologico, come un picco che può avere polarità
positiva o negativa (P o N). La Figura 16 mostra un esempio di potenziale evocato. Si noti
che, per convenzione, l’asse del potenziale è invertito rispetto all’uso comune, a causa della
modalità di visualizzazione dei vecchi dispositivi galvanometrici.
I potenziale evocati si distinguono in due tipi fondamentali:
-
Stimolo-correlati, dipendono dalle caratteristiche fisiche dello stimolo. La loro latenza è
nell’ambito temporale della percezione.
-
Evento-correlati o ERPs, la loro generazione è funzione del contesto psicologico
(evento) in cui avviene la stimolazione. La loro latenza è nell’ambito temporale dei
fenomeni attentivi o della cognizione.
I potenziali evocati sono quindi modificazioni elettriche che avvengono nel sistema nervoso
centrale a seguito di uno stimolo esterno: in questo senso i potenziali evocati, quali gli acustici
o visivi, rappresentano la risposta obbligata ad uno stimolo particolare, e le loro caratteristiche
identificative (latenza e ampiezza) dipendono dalle caratteristiche fisiche dello stimolo
applicato (tono e intensità per quelli uditivi, contrasto, luminosità e frequenza spaziale per
quelli visivi).
I potenziali evento-correlati, diversamente da quelli stimolo-correlati, sono dipendenti dal
contenuto informativo dello stimolo: compaiono solo quando il soggetto presta attenzione allo
stimolo e quando a questo è stato attribuito un “significato”.
2.6 Potenziali utili per sistemi BCI
Di seguito sono illustrati brevemente i segnali più utilizzati per la realizzazione di sistemi BCI
con una loro breve spiegazione e tipologia di registrazione [34]:
•
P300;
•
SCP (slow cortical potential);
•
VEP (visual evoked potential);
•
SSVEP (steady state visual evoked potential);
•
ritmi µ e β;
•
frequenza dei potenziali d’azione dei neuroni corticali.
L’onda P300 è un potenziale evocato evento-correlato che si verifica quando l’attenzione del
soggetto è catturata da uno stimolo con valenza cognitiva. Il segnale ha una forma d’onda
caratterizzata dalla presenza di un picco positivo (P) dopo una latenza di circa 300ms dalla
40
presentazione dello stimolo, e da questo prende il nome (Figura 17). La latenza della P300
esprime il tempo impiegato dal soggetto per completare il pieno riconoscimento dello stimolo
atteso. L’ampiezza, invece, è funzione della quantità d’informazione da esso trasmessa al
soggetto [35]. Risulta quindi molto utile come indice di concentrazione in quanto la P300 è
presente solo in quei casi in cui l’individuo è consapevole dello stimolo ricevuto.
La P300 può essere misurata sia in modo invasivo che non invasivo ed è preponderante nella
zona parietale dell’encefalo (elettrodi in posizione mediale da nasion ad inion, è rilevato in
prevalenza su Cz nel sistema 10-20).
Figura 17 L’onda P300
Slow Cortical Potential (Figura 18): costituiscono le basse frequenze del segnale
elettroencefalografico. Questi potenziali hanno una latenza che varia tra i 5 ed i 10 secondi e
sono caratteristici dei movimenti complessi che necessitano un coinvolgimento della corteccia
cerebrale. L’uomo è in grado di controllare questi potenziali che quindi possono essere
utilizzati come segnali di controllo in ambiente BCI [36]. L’utilizzo di questo tipo di segnali è
però raro poiché necessita di un addestramento abbastanza lungo; la velocità di risposta del
sistema finale è relativamente contenuta.
41
Figura 18 Slow CorticalPotential.
Il potenziale evocato visivo (Visual Evoked Potential, VEP) è causato da una stimolazione del
campo visivo del soggetto e riflette i meccanismi elettrofisiologici alla base del processo di
elaborazione dell’informazione visiva a livello cerebrale. È di solito misurato non
invasivamente con elettrodi in zona occipitale. Gli stimoli maggiormente utilizzati sono dei
flash luminosi ad una certa frequenza o delle scacchiere in cui i quadri bianchi e neri sono
continuamente invertiti.
Nel caso di pazienti affetti da patologie che provochino una notevole attività muscolare in
zona cervicale (spasmi muscolari dovuti a crisi epilettiche, movimenti involontari della
testa…), l’utilizzo dell’elettroencefalogramma per la registrazione di segnali in regione
occipitale risulta impossibile; una soluzione è l’utilizzo di uno strip di elettrodi epidurali in
modo da evitare la registrazione di EMG involontario che andrebbe a sporcare in modo
considerevole il segnale [37].
Steady State Visual Evoked Potential o SSVEP (Figura 19) sono potenziali evocati, molto
simile ai VEP già discussi, generati tramite stimolazione visiva. Come richiamato dal nome,
questi potenziali sono di tipo steady-state, cioè il potenziale generato da una stimolazione
visiva con frequenza superiore ai 3 Hz ed inferiore ai 75 Hz si mantiene nel tempo (nel caso
di normale VEP il segnale è transiente con latenza di circa 125ms [38]). Nel caso di
potenziale steady-state, la stimolazione provoca la generazione di una risposta periodica a
livello corticale a frequenza multipla intera del segnale di stimolazione. Il metodo di
registrazione è del tutto simile a quello utilizzato per i normali potenziali evocati visivi.
42
Figura 19 Spettro di ampiezza di SSVEP in risposta ad una stimolazione visiva a 7Hz a)Spettro su un singolo
trial b) Spettro Mediato su 40 trial
I ritmi µ (Figura 20a) sono delle particolari frequenze tra 8 e 12 Hz presenti nella regione
sensoriale primaria e nella corteccia motoria e premotoria. Questi ritmi, già visti nel §2.4,
sono presenti solo in alcuni soggetti e solamente in stato di veglia e/o quando il soggetto non
si sta concentrando su alcuna attività motoria o sensoriale. I ritmi µ sono associati a frequenze
tra 18-26 Hz mentre i ritmi β spesso sono armoniche dei primi.
Il movimento e la semplice preparazione all’atto motorio provocano una diminuzione dei
ritmi µ e β in particolare nella zona contro-laterale. L’abbassamento dei due ritmi è detto ERD
(event-related desynchronization) mentre la relativa controparte a movimento eseguito è
denominata ERS (event-related synchronization). ERD e ERS possono essere molto utili in
ambito BCI come segnali di comando in quanto possono essere facilmente registrati tramite
un normale EEG e, soprattutto, in quanto presenti anche quando il movimento non viene
eseguito ma solo “pensato” o visualizzato: il cosiddetto motor imagery [18].
Negli ultimi anni si è dimostrato che alcuni animali (in particolare gli scimpanzé) riescono a
controllare la frequenza di “sparo” (Figura 20b) di neuroni corticali per imparare ad
utilizzare un braccio robotico. Lo stesso principio e l’utilizzo di elettrodi intracorticali (un
metodo invasivo) permettono ad un disabile di muovere un cursore su un video per la
selezione di lettere o icone. L’utilizzo di questi segnali, come per il caso dei potenziali SCP,
43
necessita, però, di un lungo addestramento e, a causa sia del basso bit-rate sia dell’invasività
degli elettrodi, viene poco utilizzato [18].
Figura 20 a) Ritmo µ per il controllo del movimento di un cursore b) Attività dei neuroni corticali.
44
3 ANALISI DEI DATI EEG
Una volta acquisito, il segnale EEG è pronto per la sua prima elaborazione, che consisterà
nell’identificare e, se possibile, eliminare, differenti tipi di artefatti.
Questi artefatti sono configurazioni anomale dei segnali responsabili di analisi errate e di
riduzione dell’usabilità di un sistema BCI, soprattutto se vengono utilizzati sistemi di
identificazione automatica. Il riconoscimento e l’eliminazione in tempo reale di artefatti in un
tracciato EEG è un compito molto complesso ma essenziale per lo sviluppo di un sistema
pratico e funzionale.
Gli artefatti possono essere definiti come eventi legati ad un’attività elettrica che viene
rilevata dall’EEG, ma che non deriva dall’attività cerebrale e da cui non è facilmente
distinguibile.
Essenzialmente i metodi per la rimozioni degli artefatti possono essere classificati in due tipi:
-
Metodi di reiezione che consistono nello scartare parte del tracciato EEG contaminato
dagli artefatti, basandosi su individuazioni automatiche o visuali. Il successo di questi
metodi è legato, prima di tutto, alla qualità del metodo di individuazione dell'artefatto, e
dipende dal tipo di applicazione. Per una BCI possono essere metodi adeguati, ma per
un’applicazione per un paziente affetto da epilessia, le scariche dovute alle crisi
epilettiche potrebbero essere scartate come artefatti, portando ad una perdita
considerevole di dati sulla patologia.
-
Metodi di sottrazione basati sull'assunzione che il tracciato EEG sia una combinazione
lineare (o non lineare) del segnale EEG originale e dei segnali generati da fonti di
disturbo, quali il movimento degli occhi e altri movimenti muscolari. L'utilizzo di un
elettrooculogramma, EOG, permette di rilevare il potenziale prodotto dal movimento
oculare. Se all'EEG registrato è sottratto il segnale EOG, con appropriati pesi a seconda
dei canali analizzati, esiste la possibilità ottenere una parziale eliminazione
dell'artefatto. Questo metodo non e però esente da errori.
Finita la fase di preprocessing, l’ultima parte di una BCI è dedicata all'analisi, all'estrazione
delle caratteristiche di interesse atte a discriminare il segnale, alla sua classificazione (e.g.
mano destra vs mano sinistra, oppure nel nostro caso vocale /a/ vs vocale /i/), all’invio di un
comando opportuno verso l’attuatore (dispositivo di feedback). A seconda del tipo di
caratteristica da estrarre, vengono utilizzati metodi matematici differenti. Ad esempio se si
desidera estrarre informazioni sulla frequenza del segnale, si utilizza la trasformata di
45
Fourier(§3.3); se si desidera estrarre informazioni relative alla distribuzione spaziale sullo
scalpo del segnale EEG, si applicanoalgoritmi di Common SpatialPatterns (di cui tratterà il
§3.4).
3.1 Classificazione degli Artefatti
Gli artefatti possono essere classificati in tre categorie:
-
Attività transitorie: consistono in picchi di grande ampiezza, rilevabili testando
l’ampiezza picco-picco. Possono essere dovuti ad attività muscolare, movimenti, attività
elettrocardiografica, ad una cattiva connessione degli elettrodi e alla loro impedenza.
Gli artefatti dovuti ad attività muscolare possono essere ridotti o eliminati chiedendo al
soggetto di rilassarsi. Per movimenti, si intendono del corpo, della testa e dei cavi degli
elettrodi che possono essere causa degli artefatti anche quando gli elettrodi sono ben
collegati.
-
Rumore periodico: le fonti del rumore periodico sono suddivisibili in due gruppi,
artefatti esogeni e artefatti endogeni. Gli artefatti endogeni sono dovuti a sorgenti di
interferenze che si trovano fuori dal soggetto. La fonte principale è costituita dalla
corrente di rete, ovvero un segnale a 50/60 Hz. Questi artefatti sono tipicamente rilevati
da elettrodi con alta impedenza, o da lunghi cavi, i quali fungono da antenna, rilevando
il rumore dall’ambiente circostante. Altresì, tali artefatti possono essere introdotti da
cavi non schermati. L’utilizzo dei cavi ben schermati e di una stanza ben isolata per
effettuare la registrazione, può ridurli notevolmente. Un metodo valido è anche
l’utilizzo di un filtro passa-basso a media mobile. Se indichiamo con M la lunghezza
del filtro e con H[f] la risposta in frequenza, l’espressione di questo filtro è data da:
D e./9DZ
, 0 0
Ze./9D
(3.1)
Figura 21 Artefatti non fisiologici: a sinistra interferenza proveniente dalla linea di alimentazione, a destra
disturbo legato al movimento del sensore
46
Gli artefatti più gravi sono dovuti al battito delle palpebre e ai movimenti oculari. Il
movimento oculare e delle ciglia causa un aumento di potenziale tra la cornea e la retina di
circa 100mV [39]; questo disturbo affligge principalmente i segnali provenienti dagli elettrodi
in posizione frontale Fp1; Fp2; F3; F4; F7; F8, ed è riconoscibile dalla presenza, nel tracciato
EEG, di spike caratterizzati da bassa frequenza e notevole ampiezza. Nella Figura 22 si può
notare un tracciato EEG privo di artefatti oculari, registrato nella posizione frontale Fp1e lo
spettro di frequenze corrispondente.
Figura 22 Tracciato EEG privo di artefatti oculari.
La Figura 23 mostra invece l'artefatto causato dal battito delle palpebre. Come si può notare,
le basse frequenze nello spettro vanno in saturazione; un battito di palpebre infatti può essere
interpretato come una pulsazione a bassissima frequenza.
Figura 23 Tracciato EEG con un artefatto oculare.
Nella Figura 24 infine si nota come il battito delle palpebre può notevolmente influenzare
anche le posizioni degli elettrodi vicini (F7, F8, F3 e F4).
In alcune situazioni questi artefatti vengono eliminati con un esame visuale del tracciato
registrato. In Nakamura [40] vengono presentati alcuni semplici criteri per il riconoscimento
di artefatti, che possono essere d'aiuto per un’identificazione automatica. Alcuni di questi
criteri sono i seguenti:
-
elevate ampiezze nelle onde delta (0.5-4Hz) nelle posizioni Fp1 e Fp2;
-
similitudini nei segnali registrati nelle posizioni Fp1 e Fp2;
47
-
rapidi cali nelle ampiezze delle onde delta rilevate posteriormente (le ampiezze delle
onde delta in Fp1 e Fp2 sono più alte rispetto agli altri canali rilevati).
Figura 24 Tracciati EEG influenzati da artefatti
3.2 Metodo ICA
L'analisi delle componenti indipendenti (Independent Component Analysis, ICA) è un metodo
che permette di separare e rimuovere una vasta gamma di artefatti dai dati di un EEG con una
decomposizione lineare. Questo metodo si basa su alcune assunzioni:
-
I segnali temporali registrati sullo scalpo sono combinazioni spazialmente stabili delle
attività cerebrali e delle sorgenti degli artefatti;
-
Il ritardo di propagazione tra la sorgente e l'elettrodo è nullo.
Una volta estratte le sorgenti indipendenti dai dati acquisiti, viene derivato il segnale EEG
corretto, eliminando le sorgenti degli artefatti.
Per definire rigorosamente la ICA, possiamo usare il modello delle variabili latenti statistiche
[41]. Si supponga di osservare n combinazioni lineari , … . . , di n componenti
(statisticamente) indipendenti:
O iO e + iO e +. . . iO e H/Q 1, … , /
(3.2)
Se si considera ogni campione del segnale O come la realizzazione di una variabile
aleatoriaO anziché un vero e proprio segnale temporale, possiamo eliminare la dipendenza da
t ed alleggerire la notazione; stessa cosa vale per e. Senza perdita di generalità, possiamo
48
assumere che sia le variabili di miscela che le componenti indipendenti (le sorgenti) abbiano
media zero: se questo non fosse vero, allora le variabili osservabili xi possono sempre essere
centrate sottraendo la media del campione, il che rende il modello a media nulla. D’altra
parte, ricordiamo che nell’apparato di misura l’accoppiamento tra amplificatori e filtri è
realizzato in AC, il che tendenzialmente dà automaticamente segnali a media nulla.
È conveniente utilizzare la notazione matriciale invece delle somme, come nell'equazione
precedente:
Ue
(3.3)
A volte abbiamo bisogno delle colonne della matrice A; denotiamole con iO .In tal modo, il
modello può anche essere scritto così:
i e
(3.4)
Il modello statistico in (3.2) è chiamato analisi delle componenti indipendenti, o modello ICA.
Il modello ICA è un modello generativo, il che significa che descrive come i dati osservati
sono generati da un processo di miscelazione delle componenti si. Le componenti
indipendenti sono variabili latenti, ossia non possono essere osservate direttamente. Anche la
matrice di mixing si presume essere sconosciuta. Tutto ciò che osserviamo è il vettore casuale
, e noi dobbiamo stimare sia A che e a partire da esso.
Assumiamo che le distribuzioni a cui appartengono le variabili casuali non siano note (se
fossero note, il problema sarebbe notevolmente semplificato). Per semplicità, poniamo che la
sconosciuta matrice di mixing sia quadrata. Allora, dopo la stima della matrice A possiamo
calcolare la sua inversa, detta W e ottenere le componenti indipendenti:
e N
(3.5)
La tecnica ICA è strettamente legata al metodo di separazione alla cieca delle fonti (BSS,
Blind Source Separation). “Cieca” significa che si conosce molto poco, o nulla, sulla matrice
di mescolamento. L’ICA è dunque un metodo, forse il più utilizzato nelle diverse varianti, per
l’esecuzione di separazione cieca delle fonti.
3.2.1 Ambiguità nel modello ICA
Nel modello ICA della (3.3), è facile individuare le seguenti ambiguità, che non possono
essere eliminate:
1. Non siamo in grado di determinare le varianze delle singole componenti indipendenti.
49
La ragione è che, essendo sia e che A sconosciute, un fattore moltiplicativo αi in una delle
sorgenti si può essere compensato dividendo la corrispondente colonna i di A per il
medesimo scalare αi:
5
1
i 7 e (3.6)
Quindi è lecito e conviene fissare l’entità delle componenti indipendenti, in quanto variabili
casuali, assumendo che ciascuna abbia varianza unitaria: e } 1. Allora la matrice A sarà
opportunamente riadattata.
2. Non esiste un ordine univoco delle componenti indipendenti.
La ragione è che, essendo sia e che A sconosciute, possiamo liberamente modificare l’ordine
dei termini nella somma in (3.4), e chiamare uno qualsiasi dei componenti il primo.
Formalmente una matrice di permutazione P e la sua inversa possono essere inserite nel
modello nel seguente modo: U % . Gli elementi di e sono le variabili originali eO ma in
un ordine diverso. La matrice U% è la nuova matrice di mescolamento che deve essere
ricavata.
3.2.2 Indipendenza e incorrelazione
Variabili statisticamente indipendenti soddisfano la seguente proprietà:
jℎ} j} ℎ}
(3.7)
dove j e ℎ sono due funzioni integrabili di x e y rispettivamente.
Due variabili casuali e si dicono invece incorrelate se la loro covarianza è nulla:
, } } } 0
(3.8)
Se le variabili sono indipendenti, esse sono incorrelate: questo segue direttamente
dall’equazione (3.7), prendendo j e ℎ . Si può dimostrare che (tranne nel
caso di variabili aleatorie aventi entrambe distribuzione gaussiana) non vale il viceversa,
quindi la condizione di indipendenza statistica è più forte della condizione di incorrelazione.
Poiché l’indipendenza implica l’incorrelazione, molti metodi ICA vincolano la procedura di
stima in modo che dia sempre le stime non correlate delle componenti indipendenti. Questo
riduce il numero di parametri liberi e semplifica il problema.
50