METEOROLOGIA
Enrico Ferrero
1-I MOTI ATMOSFERICI
I moti atmosferici sono descritti di un insieme di 3 equazioni
differenziali:
Conservazione della massa (equazione di continuità)
Conservazione della quantità di moto (equazioni di NavierStokes)
Conservazione dell’energia
termodinamica)
(primo
principio
della
Inoltre, per chiudere il sistema è necessaria una quarta equazione,
l’equazione di stato dei gas ideali.
2
2-L’EQUAZIONE DI CONTINUITA’
Questa equazione esprime il bilancio di massa in un volume V.
La variazione di massa e’ dovuta solo al flusso attraverso la
superficie S che contorna il volume V allora, se ρ è la densità:
dV v ndS
t V
S
Dove l’integrale sul volume nel termine a sinistra rappresenta la
massa contenuta in V e l’integrale sulla superficie a destra
rappresenta il flusso attraverso di essa.
Assumendo che il volume V non vari nel tempo e applicando il
teorema di Gauss si ottiene
t v dV 0
V
che dovendo essere soddisfatta per qualunque volume V implica
v 0
t
Per fluidi incomprimibili si ha
u1 u2 u3
v
0
.
x1 x2 x3
3
3-L’EQUAZIONE DI STATO
Per un gas lontano dal punto critico vale, con buona
approssimazione l’equazione di stato
pV nRu T
dove Ru è la costante universale dei gas (8.314 J mol-1 K-1), n il
numero di moli, n=m/0 : massa diviso massa di un mole (peso
molecolare).
L’equazione può essere riscritta in altra forma ponendo R=Ru/0
=287 m2 s-2 K-1, per aria secca e condizioni standard.
p RT
Se l’atmosfera è umida bisogna considerare il vapore d’acqua. Il
contenuto di vapore d’acqua può essere caratterizzato dall’umidità
specifica:
mv v
q
m
cioè il rapporto tra la massa del vapor d’acqua mv e la massa
dell’aria umida m=mv+md dove md è la massa dell’aria secca. Si è
1 m
v v
inoltre definito
vv V , dove vv è il volume specifico, per
cui =’v +’d.
Si ricordi che il vapore è più leggero dell’aria umida che a sua
volta è molto più leggera dell’aria secca v < < d.
4
La pressione atmosferica è la somma delle pressioni parziali
dell’aria secca pd e del vapore d’acqua e (legge di Dalton).
Supponendo che entrambi siano gas ideali si ottiene
p pd e d RT v RvT
d 1.61 v
RT 1 0.61q
RT
essendo
oppure
Rv 28.96
1.61
(rapporto tra i pesi molecolari)
R
18
p RTv
dove
Tv =T(1+0.61q)
è la temperatura virtuale, ovvero la temperatura che deve avere
una particella d’aria secca per avere la stessa densità di una
particella di aria con umidità specifica q a parità di pressione.
Inoltre Rv=1.61R.
Nel caso in cui sia presente sia vapore sia liquido si ha,
=’v+’L+’d
e
Tv =T(1+0.61q-qL),
essendo qL =’L/ per il liquido.
5
4-IL PRIMO PRINCIPIO DELLA TERMODINAMICA
Le variazioni di energia interna sono legate agli scambi di calore e
di lavoro dalla legge (primo principio)
dU Q pdV
Per un processo adiabatico dQ=0 vale l’equazione di Poisson
R
cp
v1
1
p
T
Tv 2 p2
dove cp=1007 m2 s-2 K-1 è il calore specifico a pressione costante
(diviso 0 ).
La temperatura potenziale virtuale è definita, dall’equazione di
Poisson, come la temperatura virtuale raggiunta da una particella
portata, con un processo adiabatico, dalla pressione a livello p fino
al livello 1000 mbar
R
cp
1000
Tv
p
Prendendo il logaritmo di questa espressione e differenziando
otteniamo
d dTv R dp
Tv c p p ,
6
il primo principio può essere riscritto come segue
dU Q d pV Vdp Q RdT Vdp
utilizzando la relazione di Mayer cp-cv=R e la relazione dU=cvdT,
considerando per semplicità una mole, si ottiene:
c p dT Q Vdp
Si tenga conto che in questa espressione cp ed R sono divisi per 0
e quindi anche gli altri termini vanno considerati per unità di
massa, in particolare si ha , avendo considerato una mole, V/0
=1/. Inoltre, avendo ottenuto questa espressione per unità di
massa, essa resta valida in generale per n moli.
Derivando rispetto al tempo il primo principio e considerando la
temperatura virtuale si ha
dTv
1 dp
S
dt
c p dt
1 Q
S
dove si è posto e c dt che rappresenta sorgenti e pozzi di
p
calore.
Infine con l’aiuto dell’equazione derivata per si ha
d
S
dt Tv
.
7
5-EQUAZIONI DEL MOTO (di Navier-Stokes)
La variazione della quantità di moto in un volume V è data dalle
forze sulla superficie di tale volume, più le forze agenti sull’intero
volume.
T forze di superficie
Gi forze di volume
Per l’i-esima componente (i=1,2,3):
T1i T2i T3i
d
ui
Gi
dt
x1 x2
x3
5.1)
Tensore degli stress
11 12 13
T 21 22 23
31 32 33
ii
ij
componenti normali
componenti parallele
8
E’ un tensore simmetrico
ij ji
Se il fluido e’ senza attriti, non viscoso, si ha:
ij 0
inoltre
e quindi
per ij,
11 22 33 p
11 22 33
3
p
La pressione e’ invariate per rotazioni (isotropia).
9
Sostituendo l’espressione di
ij
nell’equazione (5.1) si ottiene:
2 ui 2 ui 2 ui
dui
p
2 2 2
x
dt
xi
x2
x3
1
1
3 xi
u1 u 2 u3
x x x Gi
2
3
1
se il fluido e’ incomprimibile si ha:
2ui 2ui 2ui
dui
1 p
2 2 2 Gi
x
dt
xi
x2
x3
1
dove
e’ la viscosità cinematica.
Se il fluido si trova in un sistema di riferimento rotante (non
inerziale) come la terra. Bisogna trasformare l’equazione
precedente utilizzando le seguenti relazioni:
v
v V R
t inerziale t
dove
è la velocità
nel sistema inerziale, V la velocità
nel
sistema rotante, la velocità di rotazione terrestre ed R il vettore
posizione rispetto al centro della terra che individua la posizione
della particella d’aria.
Si ottiene:
10
dv
dV
2 V R
dt inerz. dt
dove il secondo termine della parte destra e’ l’accelerazione di
Coriolis e il terzo e’ la forza centrifuga.
Quest’ultimo, di norma, viene inglobato nel termine di gravità,
g G R
dando origine alla gravità effettiva g.
Scrivendo per componenti il termine di Coriolis si ottiene:
dui
2 ui
1 p
g i 3 2 V
2
dt
xi
x
i
5.2)
i 3 =1 se i=3 (componente verticale), altrimenti è nullo.
Considerando il sistema di riferimento della terra:
asse x1 diretto verso EST
asse x2 diretto verso NORD
asse x3 perpendicolare al piano tangente
11
e indicando con la latitudine, si ha:
2 V 1 2 sin u2 2 cos u3
2 V 2 2 sin u1
2 V 3 2 cosu1 .
6- SEMPLIFICAZIONE DELLE EQUAZIONI BASE
Ogni variabile termodinamica viene scomposta in due parti: uno
stato di riferimento (sinottico) ed una perturbazione:
p p 0 p
0
T T0 T
0
12
dove, accanto alle usuali variabili termodinamiche, pressione (p),
densità () e temperatura assoluta (T), è stata introdotta la
temperatura potenziale (), ovvero la temperatura che una
particella d’aria avrebbe se fosse portata dalla quota in cui si trova
(alla pressione p), alla quota di riferimento caratterizzata da una
pressione di 1000 hPa, tramite un processo adiabatico secco:
1000
p
T
R
cp
Le variabili di riferimento soddisfano le seguenti equazioni:
equazioni del vento geostrofico:
equazione idrostatica:
equazione di stato:
1 p0
fU g1
0 x2
1 p0
fU g 2
0 x1
1 p0
g
0 x3
p0 0 RT0
6.1a)
6.1b)
6.2)
6.3)
dove con f si è indicato il parametro di Coriolis f 2 sin .
Utilizzando la (6.3) l’equazione di stato per le variabili complete
(p, e T) diventa:
p 0 RT RT0 RT 0 RT RT0
e quindi
13
p T
p0 T0 0
p
0
ed essendo per l’atmosfera p
si ottiene:
0
T
T0
0 .
D’altra parte, dalla definizione di temperatura potenziale è anche:
T R p T
0 T0 c p p0 T0
e quindi
0
0
Il termine di pressione e quello di gravità nell’equazione di
Navier-Stokes possono essere riscritti introducendo queste
relazioni.
Utilizzando le (6.1a), (6.1b) e (6.2) e trascurando le fluttuazioni di
densità in tutti i termini tranne che in quello di gravità
(approssimazione di Boussinesq), si ottiene:
14
du1
1 p 2u1 2u1 2u1
f u2 U g 2
2 2
2
dt
0 x1
x2
x3
x1
2u 2 2u 2 2u 2
du2
1 p
f u1 U g1
2 2 2
x
dt
0 x2
x
x
2
3
1
du3
1 p 2u3 2u3 2u3
g
2 2
2
dt 0
0 x3
x
x
x
1
2
3
Si noti che l’approssimazione di Boussinesq e’ valida per flussi
atmosferici con scala verticale delle lunghezze inferiore a 1km. Da
essa deriva l’incomprimibilità del fluido e la soppressione delle
onde acustiche.
Nello scrivere i termini di Coriolis si e’ trascurato il termine
2 cos u3 per i=1 e il termine 2 cosu1 per i=3.
E’ generalmente accettato che i flussi atmosferici e oceanici sono
descritti da queste equazioni.
Non si conoscono soluzioni analitiche, ma possono essere risolte
numericamente. La complessità e’ introdotta dai termini non
lineari (prodotti delle componenti delle velocità per le loro
derivate):
dui ui
ui
ui
ui
u1
u2
u3
dt
t
x1
x2
x3
che determinano il comportamento caotico, la dipendenza dalle
condizioni iniziali e la non predicibilità.
La relazione precedente mostra anche che la variazione temporale
dui
totale (o sostanziale) dt , di una variabile atmosferica è data dalla
15
ui
somma della sua variazione locale nel tempo t più il termine
u
u
u
i
i
i
avvettivo u1 x u2 x u3 x .
1
2
3
Un grosso problema nella soluzione di queste equazioni e’ dato
dal grande numero di scale spaziali e temporali che e’ necessario
considerare.
Questo problema può essere risolto con l’ipotesi di Reynolds: le
variabili possono essere scomposte in un termine medio più una
fluttuazione, il primo termine corrispondente alla grande scala ed
il secondo alla piccola scala:
ui U i ui
p P p
le medie possono essere spaziali, temporali o d’insieme.
Sostituendo e mediando l’equazioni si ottiene:
U1
U
U1
U1
1 P
U1 1 U 2
U3
f U 2 U g2
t
x1
x2
x3
0 x1
2U1 2U1 2U1 u1u1 u1u 2 u1u3
2 2 2
x2
x3
x2
x3 x1
x1
U 2
U
U 2
U 2
1 P
U1 2 U 2
U3
f U1 U g1
t
x1
x2
x3
0 x2
2U 2 2U 2 2U 2 u2 u1 u2 u2 u2 u3
2
2
2
x
x
x3
x2
x3
1
2
x1
16
U 3
U
U 3
U 3
1 P
U1 3 U 2
U3
g
t
x1
x2
x3
0 0 x3
2U 3 2U 3 2U 3 u3 u1 u3 u2 u3 u3
2 2 2
x
x
x3
x2
x3
1
2
x1
essendo ui p 0 .
Analoghi procedimenti di media si possono applicare alle altre
equazioni differenziali che descrivono i moti atmosferici
I termini uiu j costituiscono un tensore simmetrico detto “tensore
degli stress di Reynolds” e rappresentano la turbolenza.
Il problema e’ come esprimere questi termini in funzione delle
quantità medie in modo da chiudere le equazioni, per questo
motivo va sotto il nome di “chiusura della turbolenza”.
Una semplice soluzione si ottiene immaginando che il moto
turbolento a piccola scala agisca sul moto a grande scala nello
stesso modo in cui il moto molecolare influenza il flusso
macroscopico, introducendo il concetto di “viscosità turbolenta” o
“eddy viscosity” il tensore degli stress si può esprimere in
funzione dei gradiente delle quantità medie, come segue:
u1u1 H
U1
x1 ,
u3u3 V
u2 u2 H
U 2
x2 ,
U 3
x3
17
U1 U 2
u1u2 u2u1 H
x1
x2
U1
U 3
u1u3 u3u1 V
H
x3
x1
U1
U 3
u1u3 u3u1 V
H
x3
x1
dove si è introdotta la condizione di anisotropia distinguendo tra
viscosità turbolenta orizzontale H e verticale V.
In atmosfera:
V 10 m2s-1
H 105 m2s-1
nell’oceano:
V 0.01 m2s-1
H 102 m2s-1
Valori molecolari:
= 1.5 10-5 m2s-1 per l’aria
= 10-6 m2s-1
per l’acqua.
Lo stesso procedimento può essere applicato all’equazione per la
temperatura potenziale, che riscriviamo introducendo il termine di
conduttività termica :
18
u1
u2
u3
t
x1
x2
x3
2 2 2
2 2 2 S
x2
x3 Tv
x1
introducendo l’ipotesi di Reynolds e mediando l’equazione si
ottiene:
U1
U2
U3
t
x1
x2
x3
2 2 2 u1 u2 u3
2 2 2
S
x2 x3 x1
x2
x3
Tv
x1
dove compaiono i flussi turbolenti di calore u .
19
7- IL FLUSSO GEOSTROFICO
Consideriamo la cosiddetta scala sinottica, definita dalle seguenti
grandezze di scala per le variabili che caratterizzano il moto
atmosferico:
U 10 m s-1
W 1 cm s-1
L 106 m
H 104 m
P/ 103 m2s-2
L/U 105 s
scala delle velocità orizzontali
scala delle velocità verticali
lunghezza di scala orizzontale
lunghezza di scala verticale
scala delle fluttuazioni orizzontali di pressione
scala dei tempi
Utilizzando questi valori di scala possiamo valutare gli ordini di
grandezza e quindi la relativa importanza dei vari termini delle
equazioni del moto non mediate (5.2).
Per le equazioni orizzontali si ha:
Eq. -x
du1
dt
Eq. -y
du 2
dt
Scale
ms-2
U2
L
10-4
2 sin u2 2 cos u3
1 p
x1
2 sin u1
1 p
2u 2
2
x2
f 0U
10-3
f 0W
10-6
f 0 2 sin 0 104 s 1
10 5 m 2 s 1 .
Dove
per
x
P
L
10-3
le
2u1
2
x
U
H2
10-12
medie
latitudini
e
20
Tenuto conto degli ordini di grandezza dei vari termini possiamo
semplificare l’equazioni del moto orizzontali mantenendo solo i
termini dell’ordine di 10-3 si ottengono così l’equazioni per il moto
geostrofico :
1 p
fu2
x1
1 p
fu1
x2
Il primo termine trascurato, perché di un ordine di grandezza
inferiore e’ la derivata temporale delle componenti della velocità,
quindi queste equazioni sono valide se il rapporto tra questo
termine e quelli che le compongono e’ molto minore di 1. In altre
parole l’approssimazione geostrofica e’ valida se il numero di
Rossby definito come rapporto tra i termini inerziali (derivate
temporali) e quelli dovuti alla rotazione:
U2 /L U
Ro
fU
fL
e’ molto minore di 1 (Ro<<1). Si noti che Ro e’ una quantità
adimensionale e quindi indipendente dal sistema di misura
utilizzato.
Quando questa condizione non e’ più valida, si debbono includere
anche i termini inerziali, cioè utilizzare le equazioni quasigeostrofiche.
du1
1
fu2
dt
du 2
1
fu1
dt
p
x1
p
x2
21
Per l’equazione verticale si ha:
Eq. -z
Scale
du3
dt
2 cosu1
1 p
x3
f 0U
P0
UW
H
L
ms-2
10-7
10-3
10
con P0=103 hPa e =1 Kg m-3.
-g
2u3
2
x
g
10
10-15
W
H2
I termini più importanti sono quelli di gradiente di pressione e di
gravità, considerando solo questi due termini si ottiene
l’equazione idrostatica:
1 p
g
x3
Questa equazione può essere considerata una buona
approssimazione dell’equazione del moto verticale, in un gran
numero di casi ed di scale di moto, infatti i termini che la
compongono sono di diversi ordini di grandezza maggiori degli
altri. Tuttavia equazioni più complesse devono essere considerate
in casi in cui non sia possibile trascurare l’accelerazione verticale
(equazioni non-idrostatiche).
Quindi per le scale qui considerate o, più in generale, quando le
scale del moto siano tale da dare un numero di Rossby minore di
1, la soluzione delle equazioni del moto e’ data dal flusso
geostrofico che obbedisce al seguente set di equazioni:
22
1 p
ug
f y
1 p
vg
f x
p
g
z
U
con Ro fL 1 .
Per esempio con U=10 m s-1 f=10-4 s-1 ed L=1000 Km si ha:
Ro=0.1
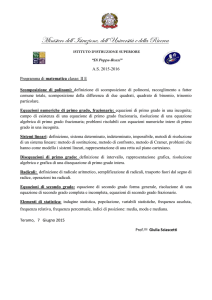
Le equazioni precedenti rappresentano un moto lungo le isobare
(curve lungo le quali la pressione e’ costante) come rappresentato
in figura per l’emisfero nord:
-grad p
U
p-p
p= cost.
Forze di
Coriolis
Si possono verificare due diverse situazioni:
23
In presenza di un minimo di pressione (L) si ha circolazione
ciclonica:
U
L
-grad p
Co
In presenza di un massimo di pressione (H) si ha circolazione
anticiclonica:
H
Co
-grad p
U
8- IL VENTO TERMICO
In presenza di un gradiente orizzontale di densità si ha una
variazione del vento geostrofico con la quota.
24
p=cost
z
z 2
p+p
z1
=cost
x1
x2
x
Essendo x 0 per l’equilibrio idrostatico ( p gz ) deve
essere z2 z1 , quindi, come mostrato in figura, le superfici
isobariche sono inclinate verso l’alto con pendenza crescente con
la quota, ne risulta che il gradiente orizzontale di pressione cresce
con la quota e quindi il vento geostrofico cresce con la quota.
Derivando rispetto a z le componenti del vento geostrofico:
u g
1 p
z
f 0 z y
v g
1 p
z
f 0 z x
e introducendo l’equazione idrostatica si ottiene la variazione delle
componenti del vento geostrofico con la quota in funzione del
gradiente orizzontale di densita’:
25
u g
g
z
f 0 y
v g
g
z
f 0 x
Si noti che si e' utilizzata l'approssimazione di Boussinesq,
considerando le fluttuazioni di densità rispetto allo stato base solo
nel termine di gravità.
Si definisce vento termico la differenza del vento geostrofico a
quote diverse, non è quindi un vento reale.
Si può dimostrare che il vento termico e’ parallelo alle isoterme
con l’aria calda sulla destra nell’emisfero nord.
Si noti per inciso che il vento termico non e’ un vero e proprio
vento (per così dire non ‘soffia’) ma e’ unicamente la differenza
del vento geostrofico tra due livelli isobarici. Esso e’ tuttavia
un’utile quantità in meteorologia, infatti, come si può vedere
dall’esempio che segue, può essere utile a valutare l’avvezione di
temperatura, cioè il movimento di masse d’aria a diversa
temperatura, dalla misura del vento geostrofico a due diverse
quote.
Si consideri la situazione mostrata in figura:
26
aria fredda
T-T
Vg1
T
Vg0
VT
T+T
aria calda
se si osserva una rotazione antioraria con la quota del vento
geostrofico si ha avvezione fredda, cioè il vento geostrofico soffia
da zone dove l’aria e’ più fredda verso zone dove l’aria e’ più
calda.
Nel caso in cui si osservi una rotazione in senso orario si ha
avvezione calda.
aria fredda
T-T
VT
T
Vg0
Vg1
T+T
aria calda
Viceversa si può stimare il vento geostrofico ad ogni quota, noto il
suo valore ad un certo livello, dal campo di temperatura.
Il vento termico e’ un fenomeno tipicamente baroclino, infatti si
definisce fluido baroclino un fluido in cui le superfici di ugual
densità non sono parallele alle superfici di ugual pressione:
27
=cost.
p=cost.
In un’atmosfera di questo tipo si ha p T 0 e quindi il vento
geostrofico varia con la quota.
In un fluido barotropico invece la densità dipende solo dalla
pressione ( p ) , le superfici di ugual densità sono parallele
alle superfici isobariche:
p=cost.
=cost.
In una atmosfera barotropica si ha p T 0 e quindi
Vg
ln p
0
, il vento geostrofico non varia con la quota.
28
9 TEOREMA DI TAYLOR-PROUDMAN
Consideriamo, in un fluido omogeneo, un flusso geostrofico:
Ro
U
1 ,
fL
siano le forze viscose trascurabili:
U
fU
E
1
2
2
L
fL
dove si e’ definito il numero di Ekman (E) come rapporto tra le
forze viscose e le forze di Coriolis.
L’equazioni del moto sono quelle del moto geostrofico per
l’orizzontale e l’equazione idrostatica per la direzione verticale:
1 p
fu
0 y
1 p
fv
0 x
p
g
z
derivando la prima equazione rispetto ad x, la seconda rispetto ad
y e sommando membro a membro si ottiene:
u v
f 0
x y
inoltre, per la condizione di incomprimibilità
u 0 , si ha:
29
w
0;
z
derivando ora rispetto a z l’equazioni geostrofiche e introducendo
l’equazione idrostatica, si ottiene:
u v
0
z z
In conclusione, non si ha variazione del campo di velocità lungo la
direzione verticale (direzione parallela all’asse di rotazione):
U
0
z
Inoltre, se esiste una parete solida perpendicolare all’asse di
rotazione, in corrispondenza di tale parete deve essere w=0 (come
ad esempio al suolo), per quanto visto in precedenza si ha:
u v
0 e w=0 in ogni punto lungo questa direzione.
z z
Quindi il flusso e’ interamente bidimensionale in piani
perpendicolari all’asse di rotazione.
30
10 EQUAZIONI PER ACQUA SOTTILE
Consideriamo la situazione mostrata in figura, un strato di fluido
omogeneo di spessore H e dimensione orizzontale L per cui sia:
H<<L (modello per l’acqua sottile).
Per la condizione di incomprimibilità ( u 0 ) si ha:
U W
U
L
0 e quindi
;
L H
W H
essendo H<<L si ha anche W<<U.
z
H
Sia (x,y) la variazione di spessore del fluido rispetto ad H
(<<H), la pressione alla generica quota z può essere espressa in
funzione di questa quantità:
p( z) g H z
e quindi:
31
p
g
x
x
e
p
g
y
y
10.1)
Utilizzando le espressioni (10.1) per i gradienti orizzontali di
pressione si possono scrivere l’equazioni prognostiche del moto
orizzontale come segue:
du
fv g
dt
x
dv
fu g
dt
y
Analogamente si può trattare l’equazione di continuità. In
conclusione otteniamo il set di equazioni per acqua sottile
(Shallow water model):
u
u
u
u v fv g
t
x
y
x
v
v
v
u v fu g
t
x
y
y
h
uh vh 0
t x
y
dove h=H+.
32
11 CONSERVAZIONE DELLA VORTICITÀ POTENZIALE
Consideriamo le equazioni per acqua sottile. Derivando la prima
equazione rispetto a y e la seconda rispetto a x e sottraendo
membro a membro:
v u v
v
u v
t x y x x
y
u v
u
u
u
v f 0 v 0
y x
y
x y
11.1)
in cui si e’ usata l’approssimazione di -plane per la variazione
del parametro di Coriolis con la latitudine:
f f0 y
dove si intende y diretta lungo i meridiani.
Introducendo la vorticità relativa:
U
si ha per la componente verticale:
v u
x y
e l’equazione (11.1) diventa:
Le aree a circolazione antioraria (ciclonica nell’emisfero nord)
sono caratterizzate da valori della vorticità relativa positiva,
33
mentre le aree a circolazione oraria (anticiclonica nell’emisfero
nord) sono caratterizzate da vorticità relativa negativa.
u v
u
v
f 0 v 0
,
t
x
y
x y
utilizzando l’equazione di continuità
D
1 Dh
f 0
v 0 ,
Dt
h Dt
inoltre essendo
Df f
f
f
u v v
Dt t
x
y
si ottiene:
D f f 0 Dh
Dt
h
Dt
oppure, essendo y f 0 ,
D f
0
Dt h
La quantità tra parentesi, chiamata vorticità potenziale:
P
f
h
34
si conserva lungo il moto.
Consideriamo per semplicita’ l’emisfero nord. Se il fluido passa
sopra un ostacolo (p.e. un rilievo montuoso) lo spessore h del
fluido diminuisce e di conseguenza (restando f costante), affinché
la vorticità potenziale rimanga costante, anche la vorticità relativa
deve diminuire creando una curvatura in senso orario nel flusso
(anticiclonica). Viceversa se lo spessore del fluido aumenta, la
vorticità potenziale aumenta e si crea una circolazione antioraria
(vorticità ciclonica).
Questo costituisce l’importante principio di conservazione della
vorticità potenziale. Si può dimostrare che questo principio e’
valido anche per fluidi non omogenei ma barotropici, nella forma:
2
P
dove è una quantità che si conserva per ogni elemento di fluido.
Nel caso di fluidi baroclini è possibile definire la vorticità
potenziale di Ertel come segue:
P f g
p
dove è la componente verticale della vorticità relativa
calcolata su superfici isoentropiche (a temperatura potenziale =
cost.).
Si può dimostrare che per flussi adiabatici e non viscosi questa
quantità si conserva lungo il moto.
La vorticità potenziale, in generale, rappresenta sempre il rapporto
tra la vorticità assoluta, somma di quella relativa e quella
planetaria, e l’effettivo spessore dei vortici.
35
In questo caso l’effettivo spessore è la distanza tra superfici a
temperatura potenziale costante, misurate in unità di pressione.
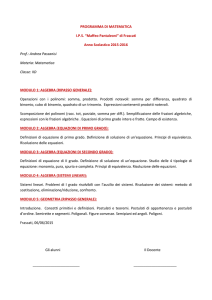
Un interessante esempio è costituito dal flusso su un rilievo
orografico.
Si noti il diverso comportamento del flusso da ovest rispetto a
quello da est, a causa del termine di vorticità planetaria.
36
(da Holton, 1992)
37