6
Calcolo integrale
6.1 Definizione di integrale
Il primo obiettivo di questo capitolo è vedere se riusciamo a trovare un modo per
costruire funzioni con derivata assegnata. Questo è un problema comune nella pratica scientifica, in quanto spesso siamo in grado di controllare la variazione di una
data quantità, e partendo dalla variazione vogliamo studiarne il comportamento.
Esempio 6.1 Alzando o abbassando la fiamma sul fornello il tuo assistente controlla la variazione di temperatura dell’acqua; ma a te serve sapere quando l’acqua
bolle, cioè quando la temperatura raggiunge il valore effettivo di ebollizione.
Esempio 6.2 Variando la quantità di nutrimento il tuo assistente può controllare
la velocità di crescita di un campione di batteri; a te interessa evitare che il numero
totale di batteri non divenga eccessivo, uscendo dalla provetta e riempiendoti il
laboratorio.
Esempio 6.3 La legge di Newton dice che la forza che viene applicata a un corpo
ne determina l’accelerazione. Controllando la forza, tu controlli l’accelerazione, cioè
la derivata della velocità; per conoscere l’effettivo percorso fatto dal corpo soggetto
a quella forza occorre quindi trovare una funzione la cui derivata della derivata sia
l’accelerazione nota.
Partiamo quindi da una funzione f definita e continua vicino a un punto x0 .
Trovare una funzione che abbia come derivata il valore di f in x0 (ma non necessariamente in altri punti) è molto facile: basta prendere la funzione lineare
ax0 (x) = (x − x0 )f (x0 ) .
Non è l’unica possibilità; possiamo prendere anche
ax0 (x) = (x − x0 )f (x)
260
Capitolo 6
In tutti e due i casi abbiamo
ax0 (x0 ) = ax0 (x0 ) = 0
dax0
dax0
(x0 ) =
(x0 ) = f (x0 ) ,
dx
dx
e
come potrai verificare facilmente
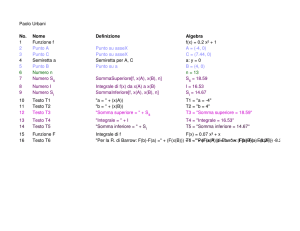
Queste due funzioni hanno un’interpretazione geometrica molto intuitiva. Per
esempio, se x > x0 e f (x0 ) > 0 allora ax0 (x) è l’area del rettangolo di base l’intervallo [x0 , x] e altezza f (x0 ). Analogamente, se x > x0 e f (x) > 0 allora ax0 (x) è
l’area del rettangolo di base l’intervallo [x0 , x] e altezza f (x); vedi la Fig. 6.1.
f(x)
f(x0)
x0
Figura 6.1
x
.
Osservazione 6.1 Possiamo rimuovere le ipotesi sul segno di f (x0 ), f (x) e x − x0
introducendo l’area orientata di (alcuni) rettangoli. Sia R un rettangolo con lati
paralleli agli assi, e indichiamo con (x0 , y0 ), (x, y0 ), (x, y) e (x0 , y) le coordinate dei
quattro vertici del rettangolo. Nota che non abbiamo specificato se x0 è maggiore
o minore di x, o se y0 è maggiore o minore di y. Allora l’area orientata di R è data
dalla formula
A(R) = (x − x0 )(y − y0 ) .
In particolare, l’area orientata è positiva se x > x0 e y > y0 (o x < x0 e y < y0 );
ed è negativa se x > x0 ma y < y0 (o se x < x0 e y > y0 ). Se ci fai caso, l’area
orientata è positiva se i quattro vertici (x0 , y0 ), (x, y0 ), (x, y) e (x0 , y) sono elencati
in senso antiorario, mentre è negativa se sono elencati in senso orario. Con questa
del rettangolo di vertici (x0 , 0), (x, 0),
¢ a¡x0 (x) misura
¢ l’area orientata
¡definizione,
x0
a
(x)
misura
l’area orientata del rettangolo di
x, f (x0 ) e x0 , f (x0 )¡ , mentre
¢ ¡
¢
vertici (x0 , 0), (x, 0), x, f (x) e x0 , f (x) . Nota che se x > x0 allora l’area
orientata è positiva se il rettangolo è contenuto nel semipiano superiore, e negativa
se è contenuta nel semipiano inferiore.
Curiosità 6.1 Più in generale, orientare un poligono convesso significa scegliere l’ordine in cui
percorrere i vertici; se si percorrono in senso antiorario, il poligono è orientato positivamente,
altrimenti è orientato negativamente. L’area orientata di un poligono convesso orientato è
allora uguale all’area usuale se il poligono è orientato positivamente, e all’opposto dell’area
6.1
Definizione di integrale
261
usuale se il poligono è orientato negativamente. In particolare, l’area orientata di un poligono
convesso orientato negativamente è sempre negativa.
Le derivate delle funzioni ax0 e ax0 però non è detto che coincidano con f in
punti diversi da x0 . Questo non stupisce dato che chiaramente non considerano
più di tanto il comportamento di f fuori da x0 — a meno che la funzione f non sia
costante vicino a x0 .
Un modo per esprimere che la funzione f è costante in un intervallo [a, b] è dire
che la parte di piano compresa fra l’asse x e il grafico di f sopra [a, b] coincide con
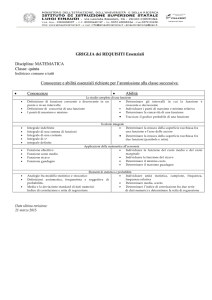
un rettangolo di base [a, b]. Questo suggerisce la seguente definizione: il sottografico Γf (x0 , x) di una funzione
¡ f sopra
¢ un
¡ intervallo
¢ [x0 , x1 ] è il rettangolo curvilineo
di vertici (x0 , 0), (x1 , 0), x1 , f (x1 ) e x0 , f (x0 ) , dove colleghiamo gli ultimi due
vertici non con un segmento ma con il grafico di f ; vedi la Fig. 6.2.
f(x)
f(x0)
Γf(x0, x)
x0
Figura 6.2
x
Sottografico.
Il nostro obiettivo è definire l’area orientata Ax0 (x) del sottografico Γf (x0 , x);
la nostra speranza è che Ax0 sia derivabile e che si abbia
∀x ∈ [x0 , x1 ]
dAx0
(x) = f (x) .
dx
L’idea è di approssimare il sottografico con tanti rettangolini. Per dare l’idea di
cosa vogliamo fare, supponiamo per semplicità che la nostra funzione f sia crescente
e positiva nell’intervallo [x0 , x1 ]. Suddividiamo questo intervallo in n intervallini
tutti uguali, di lunghezza ∆t = (x1 − x0 )/n e di estremi x0 = t0 < t1 < · · · tn = x1 ,
con tj+1 − tj = ∆t per j = 0, . . . , n − 1. Su ciascun intervallino [tj , tj+1 ] costruiamo due rettangoli: uno più piccolo di altezza f (tj ), e uno più grande di
altezza f (tj+1 ). Siccome abbiamo supposto f crescente e positiva, il rettangolino
più piccolo è contenuto nel sottografico mentre il rettangolino più grande sborda
dal sottografico. Inoltre, se indichiamo con Rn (x0 , x1 ) l’unione dei rettangolini
più piccoli e con Rn (x0 , x1 ) l’unione dei rettangolini più grandi, abbiamo (vedi la
Fig. 6.3)
(6.1)
Rn (x0 , x1 ) ⊆ Γf (x0 , x1 ) ⊆ Rn (x0 , x1 ) .
262
Capitolo 6
Rn(x0, x)
Rn(x0, x)
x0
Figura 6.3
x
Area del sottografico.
Inoltre,
X
¢ n−1
¡
f (tj )∆t = f (t0 )∆t + f (t1 )∆t + · · · + f (tn−1 )∆t ,
Area Rn (x0 , x1 ) =
j=0
¢
¡
Area Rn (x0 , x1 ) =
n−1
X
f (tj+1 )∆t = f (t1 )∆t + · · · + f (tn−1 )∆t + f (tn )∆t ,
j=0
per cui
¡
¢
¡
¢ ¡
¢
¡
¢
Area Rn (x0 , x1 ) − Area Rn (x0 , x1 ) = f (tn ) − f (t0 ) ∆t = f (x1 ) − f (x0 ) ∆t .
(6.2)
In particolare, all’aumentare del numero di intervallini la differenza fra l’area dei
rettangolini più piccoli e l’area dei rettangolini più grandi tende a zero (in quanto
all’aumentare del numero di intervallini ∆t tende a zero). Ma, d’altra parte,
all’aumentare del numero di intervallini le due unioni di rettangolini Rn (x0 , x1 )
e Rn (x0 , x1 ) si avvicinano sempre di più al sottografico di f . Inoltre, se supponiamo di essere già in grado di misurare l’area del sottografico, la (6.1) implica
¡
¢
¡
¢
¡
¢
Area Rn (x0 , x1 ) ≤ Area Γf (x0 , x1 ) ≤ Area Rn (x0 , x1 ) .
(6.3)
Se poi l’area di Rn (x0 , x1 ) tende a un limite per n → +∞, la (6.2) implica che l’area
di Rn (x0 , x1 ) tende allo stesso limite, e quindi (6.3) ci dice che necessariamente
¡
¢
¡
¢
¡
¢
Area Γf (x0 , x1 ) = lim Area Rn (x0 , x1 ) = lim Area Rn (x0 , x1 ) .
n→+∞
n→+∞
Quindi possiamo approssimare con la precisione che vogliamo l’area del sottografico
usando l’area dei rettangolini.
Questo ci suggerisce come procedere per definire l’area del sottografico per funzioni non necessariamente crescenti o positive. Sia f : [x0 , x1 ] → R una funzione
6.1
Definizione di integrale
263
limitata, cioè per cui esiste un M > 0 tale che |f (x)| < M per ogni x ∈ [x0 , x1 ];
in altre parole, il grafico di f è contenuto in una porzione finita di piano. Per
ogni n ∈ N suddividiamo di nuovo l’intervallo [x0 , x1 ] in n intervallini tutti uguali,
di lunghezza ∆t = (x1 − x0 )/n ed estremi x0 = t0 < t1 < · · · tn = x1 , con
tj+1 − tj = ∆t per j = 0, . . . , n − 1. Scegliamo poi (ma vedi la Curiosità 6.2)
in ogni intervallo [tj , tj+1 ] un punto t<
j in cui f sia minima nell’intervallo, e un
punto t>
in
cui
f
sia
massima
nell’intervallo.
In questo modo, se f è positiva
j
l’unione Rn (x0 , x1 ) dei rettangolini di base [tj , tj+1 ] e altezza f (t<
j ) sono tutti contenuti nel sottografico, mentre l’unione Rn (x0 , x1 ) dei rettangolini di base [tj , tj+1 ]
e altezza f (t>
j ) contiene il sottografico; vedi la Fig. 6.4.
Rn(x0, x1)
Rn(x0, x1)
x0
Figura 6.4
x1
Area del sottografico, caso generale.
Diremo allora che f è integrabile sull’intervallo [x0 , x1 ] se esistono i limiti
per n → +∞ dell’area orientata di Rn (x0 , x1 ) e dell’area orientata di Rn (x0 , x1 ),
e questi limiti coincidono:
¡
¢
¡
¢
lim Area Rn (x0 , x1 ) = lim Area Rn (x0 , x1 ) .
n→+∞
n→+∞
Il valore di questo limite è l’area Ax0 (x1 ) del sottografico Γf (x0 , x1 ), si indica col
simbolo
Z x
1
Ax0 (x1 ) =
f (t) dt ,
x0
e si chiama integrale definito della funzione f sull’intervallo [x0 , x1 ]. I valori x0 e x1
si chiamano estremi di integrazione, e l’intervallo [x0 , x1 ] intervallo di integrazione.
Infine, la funzione f viene detta integrando, o funzione integranda.
Osservazione 6.2
Z
Ricordando la definizione di area orientata, vediamo che
x1
f (t) dt = lim
x0
n→+∞
n−1
X
j=0
f (t<
j )∆t = lim
n→+∞
n−1
X
j=0
f (t>
j )∆t .
264
Capitolo 6
Il simbolo scelto per l’integrale ricorda questo
passaggio al limite: ∆t è divenR
tato dt come per le derivate, e il simbolo è una esse allungata, per indicare che
la sommatoria Σ si è allungata fino all’infinito. Attenzione: la lettera t nel simbolo
dell’integrale non ha alcun significato specifico, e può essere sostituita da qualsiasi
altro simbolo che non compaia negli estremi di integrazione o nella definizione della
funzione f . Per esempio,
Z
Z
x1
x0
Z
x1
f (t) dt =
x1
f (s) ds =
x0
f (u) du ,
x0
ma è meglio evitare scritture del tipo
Z
x
f (x) dx .
x0
Osservazione 6.3 Siccome abbiamo usato l’area orientata dei rettangoli, l’integrale
di una funzione negativa è negativo; più in generale, l’integrale di una funzione con
segno qualsiasi si ottiene sommando le aree delle parti del sottografico contenute
nel semipiano superiore e sottraendo le aree (usuali, non orientate!) delle parti del
sottografico contenute nel semipiano inferiore.
Osservazione 6.4
Se x1 > x0 , per convenzione si pone
Z
x0
Z
f (t) dt = −
x1
x1
f (t) dt ;
x0
questo è coerente con la discussione di area orientata dei rettangoli fatta nell’Osservazione 6.1.
Osservazione 6.5
Se x1 = x0 si ha
Z x0
f (t) dt = 0 ;
x0
infatti in questo caso il sottografico si riduce a una linea, che ha area zero.
Osservazione 6.6 Come vedrai, la definizione di integrale non si usa praticamente
mai per calcolare un integrale; lavoreremo quasi esclusivamente con le proprietà
dell’integrale (che derivano però dalla definizione, per cui non potevamo esimerci
dal citarla).
Nella prossima sezione vedremo che l’integrale è esattamente ciò che ci serve
per trovare una funzione con derivata data.
Curiosità 6.2 Nella definizione di integrale abbiamo supposto, per semplicità, che la funzione f
avesse massimo e minimo in ciascun intervallino [tj , tj+1 ]. Questo è vero per le funzioni continue (Curiosità 4.1), ma non per tutte le funzioni. Per ovviare a questo problema, si procede
in modo un poco più generale. Una funzione a scala è una funzione costante a tratti. In
6.1
Definizione di integrale
265
altre parole, una funzione s: [x0 , x1 ] → R è a scala se esistono x0 = t0 < t1 < · · · < tn = x1
(non necessariamente equidistanti) e numeri reali c0 , . . . , cn−1 ∈ R tali che s(x) valga costantemente cj sull’intervallo aperto (tj , tj+1 ), per j = 0, . . . , n − 1 (e fa quello che le pare negli
estremi). Siccome il sottografico di una funzione a scala è formato da un numero finito di
rettangoli, l’integrale di una funzione a scala si definisce banalmente con la formula
Z
x1
s(t) dt =
x0
n−1
X
cj (tj+1 − tj ) .
j=0
Supponiamo ora che f : [x0 , x1 ] → R sia una funzione limitata, e M > 0 tale che |f (x)| < M
per ogni x ∈ [x0 , x1 ]. Indichiamo con F< la famiglia di tutte le funzioni a scala s: [x0 , x1 ] → R
minori o uguali a f , cioè tali che s(x) ≤ f (x) per ogni x ∈ [x0 , x1 ]; e con F> la famiglia di
tutte le funzioni a scala s: [x0 , x1 ] → R maggiori o uguali a f , cioè tali che s(x) ≥ f (x) per
ogni x ∈ [x0 , x1 ]. Per esempio, la funzione costantemente uguale a −M appartiene a F< ,
e la funzione costantemente uguale a +M appartiene a F> . Ora, l’insieme degli integrali
delle funzioni a scala appartenenti a F< è limitato superiormente (vedi la Curiosità 4.11)
da M (x1 − x0 ) (perché?); indichiamo con I< (f ) l’estremo superiore (vedi di nuovo la Curiosità 4.11) di questi integrali. Analogamente, l’insieme degli integrali delle funzioni a scala
appartenenti a F> è limitato inferiormente da −M (x1 − x0 ) (perché?); indichiamo con I> (f )
l’estremo inferiore di questi integrali. Chiaramente (perché?) I< (f ) ≤ I> (f ) sempre; diremo
che f è integrabile su [x0 , x1 ] se I< (f ) = I> (f ), e in tal caso l’integrale definito di f su [x0 , x1 ]
è dato da questo valore comune:
Z
x1
f (t) dt = I< (f ) = I> (f ) .
x0
Curiosità 6.3 Non è difficile usare la definizione appena data per dimostrare che ogni funzione
monotona è integrabile. Sia f : [x0 , x1 ] → R monotona; per semplicità, supponiamo sia crescente (il ragionamento nel caso decrescente sarà analogo). Usando i simboli sopra introdotti,
per ogni n ≥ 1 abbiamo (perché?)
¡
¢
¡
¢
Area Rn (x0 , x1 ) ≤ I< (f ) ≤ I> (f ) ≤ Area Rn (x0 , x1 ) .
Quindi
¡
¢
¡
¢
0 ≤ I> (f ) − I< (f ) ≤ Area R (x0 , x1 ) − Area Rn (x0 , x1 ) ≤
n
¡
¢
f (x1 ) − f (x0 ) (x1 − x0 )
n
,
grazie a (6.2). Siccome questo deve valere per ogni n ≥ 1, otteniamo I> (f ) − I< (f ) = 0, come
voluto.
Curiosità 6.4 Un ragionamento non molto diverso permette di dimostrare che ogni funzione
continua è integrabile. Prima però dobbiamo introdurre un altro risultato. Abbiamo detto che
una funzione f : [a, b] → R è continua se per ogni x0 ∈ [a, b] e per ogni ε > 0 esiste un δ > 0 (che
a priori dipende sia da ε sia da x0 ) tale che |x − x0 | < δ implica |f (x) − f (x0 )| < ε. In realtà si
può dimostrare che siccome [a, b] è un intervallo chiuso e limitato, allora per ogni ε > 0 esiste
un δ > 0 tale che |x−x0 | < δ implica |f (x)−f (x0 )| < ε per ogni x, x0 ∈ [a, b]; in altre parole, δ
dipende solo da ε e non da x0 . Si dice che f è uniformemente continua sull’intervallo [a, b]
(Attenzione: ci sono funzioni continue f : R → R che non sono uniformemente continue su
tutta la retta reale, ma solo sugli intervalli chiusi e limitati).
Sia allora f : [x0 , x1 ] → R una funzione continua. Fissiamo N ≥ 1, e poniamo ε = 1/N .
L’uniforme continuità ci dice (perché?) che possiamo trovare n ≥ 1 tale che |t−s| ≤ (x1 −x0 )/n
266
Capitolo 6
implica |f (t) − f (s)| < ε per ogni t, s ∈ [x0 , x1 ]. Suddividiamo allora l’intervallo [x0 , x1 ] nei
soliti n intervallini di lunghezza ∆t = (x1 − x0 )/n. Con le notazioni introdotte sopra abbiamo
n−1
X
n−1
X
f (t<
j )∆t ≤ I< (f ) ≤ I> (f ) ≤
j=0
f (t>
j )∆t .
j=0
>
>
<
Sappiamo che t<
j , tj ∈ [tj , tj+1 ], per cui |tj − tj | ≤ |tj+1 − tj | = ∆t; quindi
n−1
X
f (t>
j )∆t −
j=0
n−1
X
f (t<
j )∆t =
j=0
n−1
X
¡
¢
<
f (t>
j ) − f (tj ) ∆t < ε
j=0
n−1
X
∆t = ε(x1 − x0 ) =
x1 − x0
.
N
j=0
Ne segue che
0 ≤ I> (f ) − I< (f ) ≤
n−1
X
f (t>
j )∆t −
j=0
n−1
X
f (t<
j )∆t <
x1 − x0
.
N
j=0
Siccome questo deve valere per ogni N ≥ 1, otteniamo I> (f ) − I< (f ) = 0, come voluto.
6.2 Proprietà dell’integrale
Cominciamo questa sezione raccogliendo alcune proprietà dell’integrale che seguono
dalla sua definizione come area orientata del sottografico.
Una prima cosa facile da fare è calcolare l’integrale
R xdella funzione costantemente
Rx
uguale a 1, integrale che scriveremo per semplicità x01 dt invece di x01 1 dt:
Z
x1
dt = x1 − x0 ,
(6.4)
x0
in quanto il sottografico della funzione costante 1 è un rettangolo di base x1 − x0
e altezza 1.
Sia f : [x0 , x1 ] → R una funzione integrabile. Prima di tutto
Z
Z
x
∀x ∈ [x0 , x1 ]
Z
x1
f (t) dt +
x1
f (t) dt =
f (t) dt .
x
x0
(6.5)
x0
Infatti, il sottografico Γf (x0 , x1 ) è l’unione disgiunta dei sottografici Γf (x0 , x)
e Γf (x, x1 ); quindi la sua area è la somma delle aree dei due pezzi.
Osservazione 6.7
L’Osservazione 6.4 e la (6.5) implicano che
Z
Z
b
x0
Z
a
f (t) dt −
f (t) dt =
x0
b
f (t) dt
a
indipendentemente dall’ordine relativo di x0 , a e b.
(6.6)
6.2
Poi per ogni c ∈ R si ha
Z
Z
x1
267
x1
cf (t) dt = c
x0
Proprietà dell’integrale
f (t) dt .
(6.7)
x0
Infatti, moltiplicare per c la funzione f equivale ad allungare/accorciare il sottografico nella direzione verticale di un fattore |c| (e di scambiare il semipiano superiore
con quello inferiore se c < 0), per cui l’area orientata del sottografico viene moltiplicata per c. In particolare, prendendo f ≡ 1 otteniamo
Z x1
∀c ∈ R
c dt = c(x1 − x0 ) .
(6.8)
x0
Sia poi g: [x0 , x1 ] → R è un’altra funzione integrabile. Prima di tutto, anche f +g
è integrabile e
Z x1
Z x1
Z x1
[f (t) + g(t)] dt =
f (t) dt +
g(t) dt .
(6.9)
x0
x0
x0
Infatti, supponiamo per semplicità che f e g siano positive. Allora possiamo scomporre il sottografico di f + g in due parti: il sottografico di f , e la parte compresa
fra il sottografico di f + g e il sottografico di f (vedi la Fig. 6.5). Quest’ultimo
insieme possiamo approssimarlo con rettangolini di altezza data dalla differenza
fra f + g e f , cioè di altezza data da g; quindi con ragionamenti analoghi a quelli
fatti nella sezione precedente vediamo (i dettagli sono nella Curiosità 6.5) che l’area
di quest’ultimo insieme dev’essere uguale all’integrale di g su [x0 , x1 ], come voluto.
Se g è negativa, si ragiona in modo analogo notando che il sottografico di f + g
è ottenuto togliendo dal sottografico di f un insieme di area pari all’area (non
orientata) del sottografico di g. Se f e/o g sono di segno variabile, si scompone
l’intervallo di integrazione in sottointervalli in cui sia f sia g hanno segno costante,
si ricava (6.9) in ciascun intervallo, e poi si rimette tutto insieme usando (6.5). Di
nuovo, se ti interessano i dettagli leggi la Curiosità 6.5.
f(x)+g(x)
g(x)
f(x)
Figura 6.5
Integrale della somma.
268
Capitolo 6
Curiosità 6.5 Usiamo la definizione più generale di integrale data nella Curiosità 6.2. La
somma di funzioni a scala è una funzione a scala (perché?), ed è facile vedere (controlla) che
(6.9) è vera per le funzioni a scala. Inoltre, se s1 , s2 sono funzioni a scala con s1 ≤ f e s2 ≤ g,
chiaramente s1 + s2 ≤ f + g. Un risultato analogo vale se s1 ed s2 sono più grandi di f e g,
per cui
I< (f ) + I< (g) ≤ I< (f + g) ≤ I> (f + g) ≤ I> (f ) + I> (g) .
Ma f e g sono integrabili; quindi I< (f ) = I> (f ), I< (g) = I> (g), per cui
I< (f + g) = I> (f + g) = I< (f ) + I< (g) = I> (f ) + I> (g) ,
che è quanto volevamo.
Infine, se f (x) ≤ g(x) per ogni x ∈ [x0 , x1 ] allora
Z
x1
Z
f (t) dt ≤
x0
x1
g(t) dt .
(6.10)
x0
Infatti, il grafico di g è sopra il grafico di f , per cui il sottografico di g contiene
il sottografico di f (nel semipiano superiore, dove l’area orientata è positiva, ed
è contenuto nel sottografico di f nel semipiano inferiore, dove l’area orientata è
negativa).
Siamo ora in grado di mostrare come si usa l’integrale per trovare una funzione
con derivata data. Sia f : [a, b] → R una funzione continua, e sia A: [a, b] → R la
funzione data da
Z x
A(x) =
f (t) dt .
a
Scriviamo il rapporto incrementale per A in un punto x ∈ [a, b]:
A(x + h) − A(x)
1
=
h
h
"Z
Z
x+h
f (t) dt −
a
a
x
#
1
f (t) dt =
h
Z
x+h
f (t) dt ,
x
dove abbiamo usato (6.5). Ora, indichiamo con m(h) (rispettivamente, M (h)) il
minimo (rispettivamente, il massimo) di f sull’intervallo di estremi x e x + h.
Essendo f continua,
lim m(h) = lim M (h) = f (x) .
h→0
h→0
Ora, se h > 0 (6.10) e (6.8) ci danno
Z
x+h
f (t) dt ≤ hM (h) ;
hm(h) ≤
x
quindi
f (x) = lim+ m(h) ≤ lim+
h→0
h→0
A(x + h) − A(x)
≤ lim M (h) = f (x) .
h
h→0+
6.2
Proprietà dell’integrale
269
In maniera analoga si ragiona quando h < 0. Quindi il limite del rapporto incrementale di A in x è uguale a f (x), e abbiamo dimostrato il Primo teorema
fondamentale del calcolo: se f : [a, b] → R è una funzione continua allora
d
dx
Z
x
f (t) dt = f (x) .
a
Dunque, come avevamo sperato, l’integrale ci fornisce un modo per costruire
R x una
funzione di derivata assegnata. In altre parole ancora, la funzione F (x) = a f (t) dt
è una soluzione dell’equazione
dF
=f .
(6.11)
dx
Ricordando che due funzioni con la stessa derivata differiscono solo per una costante
additiva, ricaviamo che le soluzioni di (6.11) sono tutte e sole della forma
Z
x
f (t) dt + C
F (x) =
a
con C ∈ R.
Osservazione 6.8 Contrariamente al caso delle derivate, l’integrale di funzioni elementari spesso non si può esprimere in termini di funzioni elementari. In altre
parole, l’operazione di integrazione permette di costruire funzioni effettivamente
nuove, che non sono semplicemente una combinazione delle funzioni elementari.
Inoltre, sono funzioni di cui possiamo calcolare facilmente la derivata, per cui possono essere in buona parte studiate con le tecniche viste nel capitolo precedente.
Nelle prossime sezioni di questo capitolo vedremo le tecniche principali che possono
essere usate per cercare di esprimere un integrale in termini di funzioni elementari;
quando (spesso) non ci si riesce, per valutare un integrale bisogna ricorrere a tecniche d’approssimazione numerica che non tratteremo qui.
Il prossimo esempio mostra come gli integrali possano comparire anche in situazioni che non riguardano direttamente derivate o il calcolo di aree.
Esempio 6.4 Vogliamo tentare di definire il lavoro necessario per estendere una
molla dalla posizione di riposo s0 fino a una lunghezza s. Allungare una molla richiede l’applicazione di una forza, tanto maggiore quanto già la molla è allungata.
Iniziamo allungando la molla di una distanza ∆s; se ∆s è abbastanza piccola possiamo approssimare la forza applicata con la forza F (s1 ) necessaria per mantenere
la molla allungata fino a s1 = s0 + ∆s, e quindi possiamo approssimare il lavoro
fatto finora col prodotto F (s1 )∆s.
Proseguiamo allungando la molla fino a una lunghezza s2 = s1 + ∆s. Di nuovo,
approssimiamo la forza applicata per passare da s1 a s2 con la forza F (s2 ) necessaria per mantenere la lunghezza s2 . Il lavoro fatto per passare da s1 a s2 è
circa F (s2 )∆s, per cui il lavoro fatto per passare dalla posizione di riposo alla lunghezza s2 è circa uguale a F (s1 )∆s + F (s2 )∆s.
270
Capitolo 6
Continuando in questo modo, possiamo approssimare il lavoro necessario per
allungare la molla dalla posizione di riposo a una lunghezza s con una somma
n
X
F (sj )∆s .
j=1
L’analogia col conto fatto per calcolare l’area del sottografico è evidente. Per
migliorare l’approssimazione dobbiamo ridurre ∆s, che corrisponde ad aumentare
il numero di intervallini. Passando al limite come fatto per il calcolo dell’area
possiamo quindi esprimere il lavoro totale con l’integrale
Z
s
F (s) ds .
L=
s0
Curiosità 6.6 Adesso abbiamo gli strumenti per completare la definizione di esponenziali,
logaritmi e potenze irrazionali secondo il programma illustrato nella Curiosità 5.4. Infatti, la
funzione “log” usata lı̀ si definisce esattamente ponendo
Z
∀x > 0
x
“log”x =
1
1
dt .
t
6.3 Integrale indefinito
Abbiamo visto che derivando un integrale recuperiamo la funzione integranda. E
integrando una derivata che succede? La risposta è contenuta nel Secondo teorema
fondamentale del calcolo: se f : [x0 , x1 ] → R è una funzione derivabile si ha
Z x
df
∀x ∈ [x0 , x1 ]
(t) dt = f (x) − f (x0 ) .
(6.12)
x0 dt
Infatti, indichiamo con A: [x0 , x1 ] → R la funzione data da
Z
x
A(x) =
x0
df
(t) dt .
dt
Il primo teorema fondamentale del calcolo ci dice che
df
dA
≡
;
dx
dx
quindi A ed f devono differire per una costante additiva, cioè A(x) − f (x) = c per
un’opportuna costante c ∈ R. Ricordando che A(x0 ) = 0 otteniamo
c = A(x0 ) − f (x0 ) = −f (x0 ) ,
e quindi A(x) = f (x) − f (x0 ), che è la (6.5).
6.3
Integrale indefinito
271
Osservazione 6.9 Per indicare la differenza a secondo membro della (6.12) si usa
spesso la notazione abbreviata
¯x
¯
f (x) − f (x0 ) = f (t) ¯¯ .
x0
Il secondo teorema fondamentale del calcolo fornisce un primo metodo per calcolare qualche integrale. Infatti, se la funzione f è la derivata della funzione F , la
formula (6.12) ci dice che
Z
b
f (t) dt = F (b) − F (a) .
a
Dalla formula
Esempio 6.5
d n+1
= (n + 1)xn
x
dx
deduciamo che
d
dx
Quindi
Z
b
µ
1
xn+1
n+1
¶
= xn .
(6.13)
¯b
¯
1
bn+1 − an+1
n+1 ¯
x
;
x dx =
=
¯
n+1
n+1
a
n
a
(6.14)
nota che per n = 0 si ritrova (6.4). Mettendo insieme questo risultato con (6.7) e
(6.9) possiamo calcolare l’integrale di qualsiasi polinomio. Per esempio,
Z
Z
2
(6x + 2x − 3) dx = 6
2
1
Z
2
x dx + 2
1
Z
2
x dx − 3
2
1
2
dx
1
¯2
¯2
1 2 ¯¯
1 3 ¯¯
= 6 x ¯ + 2 x ¯ − 3(2 − 1)
3 1
2 1
= 2(23 − 1) + (22 − 1) − 3 = 14 + 3 − 3 = 14 .
Osservazione 6.10 In questo contesto si usa spesso una notazione comoda. Se f è
la derivata della funzione F , si dice che F è un integrale indefinito di f e si scrive
Z
f (t) dt = F (t) + C .
(6.15)
Il motivo di questa scrittura è che due integrali indefiniti di f differiscono per una
costante additiva (in quanto hanno uguale derivata); quindi al variare della costante
arbitraria C ∈ R il secondo membro di (6.15) descrive tutti i possibili integrali
indefiniti di f . Nota inoltre che nell’integrale a sinistra in (6.15) non compaiono
272
Capitolo 6
gli estremi di integrazione; questo perché quella formula può essere pensata anche
come abbreviazione della formula
Z
a
b
¯b
¯
f (t) dt = F (t) ¯¯
a
valida su ogni intervallo [a, b] ove f è la derivata di F .
In particolare, ogni formula di derivazione ci fornisce un integrale indefinito.
Per esempio, (6.13) ci dice che
Z
xn dx =
1
xn+1 + C ,
n+1
che è equivalente a (6.14).
Riguardando le formule di derivazione delle funzioni elementari del capitolo
precedente ricaviamo quindi i seguenti integrali indefiniti:
Z
an n+1 an−1 n
x
x + · · · + a0 x + C ;
+
(an xn + an−1 xn−1 + · · · + a0 ) dx =
n+1
n
Z
∀α 6= −1
xα dx =
1
xα+1 + C ;
α+1
Z
ex dx = ex + C ;
Z
∀a > 0 , a 6= 1
ax dx =
Z
Osservazione 6.11
scrive
1 x
a +C ;
log a
1
dx = log x + C .
x
Più precisamente, la formula per l’integrale indefinito di 1/x si
Z
1
dx = log |x| + C .
x
Infatti, 1/x può essere integrato solo su intervalli [a, b] che non contengono lo zero
(dove 1/x non è definito). Nella semiretta positiva, 1/x è la derivata di log x, per
cui non ci sono problemi. Ma nella semiretta negativa, 1/x = −1/|x| è la derivata
di log |x| = log(−x), come puoi verificare facilmente.
Rimangono le funzioni trigonometriche:
Z
sin x dx = − cos x + C ;
6.3
Integrale indefinito
273
Z
cos x dx = sin x + C ;
Z
Z
Z
1
dx = tan x + C ;
cos2 x
1
dx = − cot x + C ;
sin2 x
√
Z
1
dx = arcsin x + C ;
1 − x2
1
dx = arctan x + C .
1 + x2
Vogliamo calcolare l’integrale di sin x sull’intervallo [0, π]. Abbiamo
Esempio 6.6
Z
0
π
¯π
¯
sin x dx = − cos x¯¯ = − cos π − (− cos 0) = 2 .
0
Quindi la regione di piano limitata dall’asse delle ascisse e da una gobba della
sinusoide ha area 2.
Esempio 6.7
La formula di derivazione
d
F (cx) = cF 0 (cx)
dx
ci fornisce un modo di ricavare altre formule di integrazione. Infatti, se F è un
integrale indefinito di f , cioè F 0 = f , otteniamo
Z
1
∀c 6= 0
f (cx) dx = F (cx) + C .
c
Per esempio,
Z
∀k 6= 0
ekx dx =
1 kx
e +C ,
k
per cui
Z
Z
1
0
1
e(log 2)x dx =
2x dx =
0
¯1
1
1 (log 2)x ¯¯
21 − 20
e
=
.
=
¯
log 2
log 2
log 2
0
Gli integrali ci permettono anche di risolvere un problema rimasto in sospeso:
il calcolo dell’ordine di infinito del logaritmo e dell’esponenziale.
Per ogni c > 0 abbiamo tc−1 ≥ t−1 non appena t ≥ 1. Quindi
Z x
Z x
xc
xc − 1
1
dt ≤
<
.
tc−1 dt =
∀x ≥ 1
log x =
c
c
1 t
1
274
Capitolo 6
Elevando a potenza e dividendo, otteniamo
0<
(log x)b
xbc−a
<
a
x
cb
per ogni a, b, c > 0 e x > 1. In particolare, ponendo c = a/2b otteniamo
0<
1
(log x)b
<
xa
(a/2b)b xa/2
che tende a 0 per x → +∞. Quindi
∀a, b > 0
(log x)b
=0,
x→+∞
xa
lim
(6.16)
o anche
∀a, b > 0
per x → +∞ .
(log x)b = o(xa )
In altre parole, il logaritmo (anche elevato a potenze enormi) diverge all’infinito
più lentamente di qualsiasi potenza (anche di esponente piccolissimo).
Ponendo t = 1/x in (6.16) otteniamo un altro limite importante:
∀a, b > 0
lim ta | log t|b = 0 ,
t→0+
cioè per t → 0+ qualsiasi potenza (anche con esponente piccolissimo) riesce ad
ammazzare il logaritmo (anche elevato a potenze enormi).
Ponendo invece x = ey in (6.16) troviamo
∀a, b > 0
lim y b e−ay = 0 ,
y→+∞
(6.17)
cioè per y → +∞ l’eponenziale con esponente negativo (anche con esponente piccolissimo) riesce ad ammazzare qualsiasi potenza (anche con esponente enorme).
Infine, prendendo il reciproco troviamo
∀a, b > 0
eay
= +∞ ,
y→+∞ y b
lim
cioè l’esponenziale diverge all’infinito più velocemente di qualsiasi potenza.
Curiosità 6.7
Siamo ora in grado di verificare che tutte le derivate della funzione
n
f (x) =
2
e−1/x
0
se x > 0
se x ≤ 0
di cui abbiamo parlato nelle Curiosità 4.12 e 5.9 si annullano in 0. Siccome le derivate sinistre
sono chiaramente zero, ci basta verificarlo per le derivate destre. Prima di tutto,
f 0 (x) =
2 −1/x2
e
;
x3
6.4
Integrazione per parti
275
quindi ponendo t = 1/x2 otteniamo
lim f 0 (x) = 2 lim t3/2 e−t = 0
x→0+
t→+∞
grazie a (6.17). Ora, si vede facilmente che le derivate successive di f sono tutte della forma
2
f (j) (x) = pj (1/x)e−1/x , dove pj è un polinomio; quindi ragionando come prima otteniamo
∀j ≥ 1
lim f (j) (x) = 0 ,
x→0+
come affermato.
6.4 Integrazione per parti
I teoremi fondamentali del calcolo ci dicono che da formule di derivazione si possono
dedurre formule di integrazione. Per esempio, partiamo dalla regola di Leibniz per
la derivata del prodotto:
df
dg
d(f g)
= g+f
.
dt
dt
dt
Integrando questa formula sull’intervallo [a, x], e ricordando il secondo teorema
fondamentale del calcolo, otteniamo
¯x Z
¯
f g ¯¯ =
a
o anche
Z
a
x
a
x
df
(t)g(t) dt +
dt
Z
x
f (t)
a
dg
(t) dt ,
dt
¯x Z x
¯
dg
df
f (t) (t) dt = f g ¯¯ −
(t)g(t) dt .
dt
a dt
a
Usando la notazione dell’integrale indefinito possiamo scrivere questa formula nel
modo seguente:
Z
Z
dg
df
(t)g(t) dt ,
(6.18)
f (t) (t) dt = f g −
dt
dt
dove possiamo esimerci dallo scrivere la costante arbitraria C perché abbiamo integrali indefiniti in entrambi i membri dell’uguaglianza.
La formula (6.18) è nota come formula di integrazione per parti. L’idea è che
permette di ricondurre l’integrale di f g 0 all’integrale di f 0 g, con la speranza che
quest’ultimo sia più semplice da calcolare. A volte funziona e a volte no, come
vedremo nei prossimi esempi. Capire quando si può usare è questione di esperienza
— non necessariamente fondamentale per un biologo.
Osservazione 6.12 Attenzione: non esistono formule generali per il calcolo dell’integrale di un prodotto. A volte la formula d’integrazione per parti aiuta, ma in
molti casi l’integrale di un prodotto non è esprimibile tramite funzioni elementari.
276
Capitolo 6
Esempio 6.8 Vogliamo calcolare l’integrale di t sin t. Siccome la derivata di t è
particolarmente semplice, è naturale tentare di usare la formula di integrazione per
parti. Poniamo
f (t) = t ,
g 0 (t) = sin t
=⇒
f 0 (t) = 1 ,
g(t) = − cos t ;
quindi la formula di integrazione per parti ci dà
Z
Z
t sin t dt = −t cos t − (− cos t) dt = −t cos t + sin t + C .
(6.19)
Per esempio,
¯π
Z π
¯
t sin t dt = −t cos t + sin t¯¯ = −π cos π + sin π − (−0 cos 0 + sin 0) = π .
0
0
Nota che nel membro destro di (6.19) abbiamo dovuto reinserire la costante arbitraria C perché non vi compare più il simbolo di integrale indefinito (che contiene in sé tutte funzioni che differiscono per una costante additiva). Nota poi
che g(t) = − cos t non era l’unica scelta possibile; avremmo potuto prendere
g(t) = − cos t + k dove k ∈ R è una costante qualsiasi. Ma in tal caso avremmo
ottenuto
Z
Z
t sin t dt = t(− cos t + k) − (− cos t + k) dt
Z
Z
= −t cos t + kt + cos t dt − k dt
= −t cos t + kt + sin t − kt + C
= −t cos t + sin t + C ,
cioè la stessa formula con maggiore fatica (e del resto non poteva essere diversamente: se avessimo ottenuto una formula diversa avrebbe voluto dire che t sin t
aveva integrali indefiniti che non differiscono solo per una costante additiva, impossibile). Quindi conviene sempre scegliere g nel modo più semplice possibile.
Esempio 6.9 Vogliamo calcolare l’integrale di t2 et . Derivare et non cambia nulla,
mentre derivando t2 lo si abbassa di grado; quindi proviamo con
f (t) = t2 ,
g 0 (t) = et
=⇒
f 0 (t) = 2t ,
g(t) = et .
La formula di integrazione per parti ci dà
Z
Z
t2 et dt = t2 et − 2tet dt .
Ancora non ci siamo, ma chiaramente questo suggerisce di provare a integrare per
parti tet . Otteniamo
Z
Z
t
t
te dt = te − et dt = tet − et + C ,
6.4
per cui
277
Integrazione per parti
Z
t2 et = t2 et − 2(tet − et + C) = (t2 − 2t + 2)et + C
(nota che, con un lieve abuso di notazione, in questa formula abbiamo indicato
con la stessa lettera C costanti arbitrarie a priori diverse: per completo rigore nel
membro destro avremmo dovuto scrivere 2C. Ma siccome al variare di C in R
anche 2C copre tutti i possibili valori di R, la costante 2C è altrettanto arbitraria
di C, per cui la si indica con lo stesso simbolo senza grossi rischi di confusione).
Per esempio,
¯1
Z 1
¯
2 t
2
t¯
t e dt = (t − 2t + 2)e ¯ = e − 2 .
0
0
Con le tecniche introdotte in questi due esempi è possibile integrare tutte le
funzioni della forma
p(t) sin t + q(t) cos t + r(t)et ,
dove p, q e r sono polinomi in t. Il prossimo esempio contiene invece un’applicazione
un po’ diversa dell’integrazione per parti.
Esempio 6.10 Vogliamo integrare sin2 t. Vedendo il quadrato come prodotto
possiamo provare a porre
f (t) = sin t ,
Quindi
g 0 (t) = sin t
=⇒
f 0 (t) = cos t ,
g(t) = − cos t .
Z
Z
sin t dt = − sin t cos t +
2
cos2 t dt .
(6.20)
A questo punto potremmo provare a integrare per parti cos2 t = (cos t)(cos t); ma
otterremmo
Z
Z
cos2 t dt = cos t sin t + sin2 t dt ,
da cui dedurremmo
Z
Z
Z
sin2 t dt = − sin t cos t + cos t sin t + sin2 t dt = sin2 t dt ,
che è vera ma non molto interessante. Se invece poniamo cos2 t = 1−sin2 t in (6.20)
otteniamo
Z
Z
Z
2
2
sin t dt = − sin t cos t + (1 − sin t) dt = − sin t cos t + t − sin2 t dt ,
da cui segue
Z
sin2 t dt =
1
(t − sin t cos t) + C ,
2
278
Capitolo 6
che è la formula che risolve il nostro problema. In particolare,
¯π
Z π
¯
1
π
sin2 t = (t − sin t cos t)¯¯ = .
2
2
0
0
Esempio 6.11 Vogliamo calcolare l’integrale di log t, anche se non sembra un
prodotto. Poniamo
f (t) = log t ,
g 0 (t) = 1
f 0 (t) = t−1 ,
=⇒
g(t) = t ;
quindi
Z
Z
log t dt = t log t −
t
−1
Z
t dt = t log t −
dt = t log t − t + C .
2
Esempio 6.12
Poniamo
Galvanizzati dal successo precedente, proviamo a integrare et .
2
f (t) = et ,
g 0 (t) = 1
quindi
Z
f 0 (t) = 2tet ,
2
=⇒
t2
Z
t2
e dt = te − 2
g(t) = t ;
2
t2 et dt .
Uhm; la situazione non è migliorata. Non possiamo integrare per parti l’integrale
2
a secondo membro, perché per farlo dovremmo conoscere l’integrale di et , che è
esattamente quello che stiamo cercando. . . Questo è un caso in cui l’integrazione
per parti non funziona (e, in effetti, si può dimostrare che non c’è modo di esprimere
2
l’integrale di et tramite funzioni elementari).
6.5 Integrazione per sostituzione
Un’altra formula di derivazione molto utile è la formula di derivazione di funzione
composta:
µ
¶
df
dg
d
(f ◦ g) =
◦g
.
dt
dt
dt
Integrando otteniamo
Z
¡
¢
¡
¢
f 0 g(t) g 0 (t) dt = f g(t) + C .
(6.21)
Questa formula si chiama formula di integrazione per sostituzione; per capire il
motivo del nome (e come si applica) riscriviamola in modo lievemente diverso.
Supponiamo di avere una funzione f , e poniamo
Z
t
f (x) dx ,
F (t) =
g(t0 )
6.5
Integrazione per sostituzione
279
(dove t0 è un punto arbitrario) in modo da avere F 0 = f . Allora (6.21) con F al
posto di f diventa
Z
¡
¢ dg
¡
¢
f g(t)
(t) dt = F g(t) + C =
dt
Z
g(t)
f (x) dx + C ,
g(t0 )
o anche, con un lieve abuso di notazione,
Z
¡
¢ dg
(t) dt =
f g(t)
dt
Z
g(t)
f (g) dg + C .
(6.22)
g(t0 )
In altre parole, la formula
¡
¢ di integrazione per sostituzione ci permette di trasformare l’integrale di f g(t) g 0 (t) nell’integrale di f (x), calcolato nei valori dati dalla
funzione g. Quindi se sappiamo integrare f sappiamo integrare anche le funzioni
della forma (f ◦ g)g 0 . In particolare, l’integrale definito diventa
Z
a
b
¯b Z
Z g(a)
¯
g(b)
¯
0
f g(t) g (t) dt =
f (x) dx¯ =
f (x) dx −
f (x) dx
¯
g(t0 )
g(t0 )
g(t0 )
a
Z g(b)
f (x) dx ,
=
¡
¢
Z
g(t)
(6.23)
g(a)
grazie a (6.6).
Osservazione 6.13 Un modo per ricordarsi la formula (6.22) è che si passa dal
membro sinistro al membro destro applicando g agli estremi di integrazione ed
effettuando le seguenti sostituzioni:
¡
¢
f g(t) ,→ f (g) ,
dg
dt ,→ dg ;
dt
in un certo senso, abbiamo “semplificato” dt. Come vedrai, a volte può essere utile
effettuare la sostituzione equivalente dt ,→ g01(t) dg.
Vediamo alcuni esempi.
√
Esempio
6.13 Vogliamo integrare 3t − 1. Siccome sappiamo come integrare
√
x = x1/2 , è naturale tentare la sostituzione g(t) = 3t − 1. Allora g 0 (t) = 3, per
cui otteniamo
¯3t−1
Z
Z
Z
√
√
1
1 3t−1 √
1 2 3/2 ¯¯
3t − 1 dt =
x dx + C =
+C
( 3t − 1)3 dt =
x ¯
3
3 3t0 −1
33
3t0 −1
2
= (3t − 1)3/2 + C
9
(anche stavolta il simbolo C indica costanti diverse, ma comunque arbitrarie; in
particolare, ha assorbito la costante 29 (3t0 − 1)3/2 che, essendo t0 arbitrario, è
280
Capitolo 6
arbitraria anch’essa). Nota che potevamo passare dal primo al terzo membro con
la sostituzione diretta dt ,→ g01(t) dx = 13 dx. Un esempio di calcolo di integrale
definito è
¯1
Z 1
¯
√
2
2
3/2 ¯
3t − 1 dt = (3t − 1) ¯
= 23/2 ,
9
9
1/3
1/3
R
√
2
che è anche uguale a 13 0 x dx, in accordo con (6.23) perché g(1/3) = 0 e g(1) = 2.
Osservazione 6.14 La tecnica dell’esempio precedente ci dice che se sappiamo integrare f (x) allora sappiamo integrare f (at + b) per ogni a, b ∈ R. Per esempio,
Z
1
1
dt = log |at + b| + C .
at + b
a
Esempio 6.14 Vogliamo integrare x cos x2 . L’integrazione per parti non è direttamente applicabile, in quanto non sappiamo integrare cos x2 . Possiamo però
provare la sostituzione g(x) = x2 ; infatti (sostituendo, con un lieve abuso di notazione, l’uguale = alla freccia ,→)
x dx =
per cui
Z
1
x cos x dx =
2
Z
1
1 0
g (x) dx = dg ,
2
2
x2
2
cos g dg + C =
x20
1
sin x2 + C .
2
Esempio 6.15 Vogliamo integrare 2te−t . Ponendo nuovamente g(t) = t2 otteniamo dg = 2t dt e quindi
2
Z
−t2
2te
Z
t2
dt =
t20
In particolare,
Z
0
b
e−g dg + C = −e−t + C .
2
¯b
2
2¯
2
2te−t dt = −e−t ¯¯ = 1 − e−b .
(6.24)
0
√
√
Esempio 6.16 Vogliamo integrare sin x, provando la sostituzione g(x) = x.
Apparentemente sembrerebbe esserci un problema, in quanto g 0 (x) = 12 x−1/2 non
sembra apparire nell’integrando. Ma possiamo risolvere il problema con la seguente
operazione:
√
√
1 √
sin x = √ 2 x sin x = 2g 0 (x)g(x) sin g(x)
2 x
¡
¢
per cui abbiamo scritto l’integrando nella forma f g(x) g 0 (x), con f (t) = 2t sin t,
e quindi
Z √x
Z
√
sin x dx = 2 √ t sin t dt + C .
x0
6.5
Integrazione per sostituzione
281
Un altro modo per effettuare questo conto è scrivere
1
1
dx
dg = g 0 (x)dx = √ dx =
2g(x)
2 x
per cui
Z
√
sin x dx =
Z
√
√
=⇒
dx = 2g dg ,
x
(sin g)2g dg + C .
x0
In entrambi i casi possiamo applicare l’Esempio 6.8 ottenendo
Z
√
√
√
√
sin x dx = 2(sin x − x cos x) + C .
Esempio 6.17 La tecnica precedente non funziona invece per integrare sin x2 .
Infatti ponendo g(x) = x2 , otteniamo
p
dg = 2x dx = 2 g(x) dx
per cui
Z
Z
=⇒
x2
1
dx = √ dg ,
2 g
sin g
√ dg + C .
2 g
2
sin x dx =
x20
Tentando di calcolare quest’ultimo integrale per parti otteniamo
Z
Z
sin g
√
√
g cos g dg ,
√ dg = g sin g −
2 g
che continuiamo a non saper fare.
Curiosità 6.8 Abbiamo visto che possiamo integrare tutti i polinomi. In realtà è possibile
integrare anche tutte le funzioni razionali; vediamo come. Un teorema di algebra assicura che
ogni funzione razionale si può scrivere come somma di funzioni della forma
α
(x + a)k
βx + γ
(x2 + bx + c)m
e
per opportuni k, m ∈ N e α, β, γ, a, b, c ∈ R; inoltre si può anche supporre che b2 − 4c < 0,
in modo che il polinomio x2 + bx + c non abbia radici reali, e quindi non si possa scomporre
come prodotto di due fattori lineari.
Abbiamo già visto come si integrano le funzioni della prima forma: infatti l’Osservazione 6.14 ci dice che
Z
α
dx = α log |x + a| + C ,
x+a
Z
e
α
α
dx =
(x + a)1−k + C
(x + a)k
1−k
per ogni k > 1.
Per calcolare gli integrali della seconda forma, scriviamo
³
x2 + bx + c =
x+
b
2
´2
³
+ c−
b2
4
´
= u2 + ρ2 ,
282
Capitolo 6
dove u = x + (b/2) e ρ =
problema al calcolare
Z
1
2
√
4c − b2 > 0. La sostituzione u = x + b/2 riconduce quindi il
u
du
(u2 + ρ2 )m
Z
1
du .
(u2 + ρ2 )m
e
(6.25)
Il primo integrale si calcola con la sostituzione v = u2 ed è uguale a 12 log(u2 + ρ2 ) + C
1
(u2 + ρ2 )1−m se m > 1.
se m = 1, e a 2(1−m)
Il secondo integrale in (6.25) per m = 1 si ottiene con la sostituzione v = u/ρ, ed è uguale
a ρ1 arctan(u/ρ) + C. Per m > 1 si applica ripetutamente la formula
Z
u
1
2m − 3
1
+ 2
du =
(u2 + ρ2 )
2ρ2 (m − 1) (u2 + ρ2 )m−1
2ρ (m − 1)
Z
1
du
(u2 + ρ2 )m−1
ottenuta integrando per parti.
6.6 Integrali impropri
Finora abbiamo calcolato integrali di funzioni limitate e definite su intervalli limitati; a volte può essere utile rilassare queste ipotesi.
Per esempio, supponiamo di avere una funzione f : [a, +∞) → R definita sulla
semiretta [a, +∞) e integrabile in ogni intervallo della forma [a, b]. Diremo che f è
Rb
integrabile sulla semiretta [a, +∞) se esiste finito il limite di a f (t) dt per b → +∞,
e scriveremo
Z
Z
+∞
b
f (t) dt = lim
b→+∞
a
f (t) dt ;
a
R +∞
si dice che a f (t) dt è l’integrale improprio di f sulla semiretta, e che l’integrale
improprio converge. Se il limite esiste ma è infinito diremo che l’integrale improprio
diverge; se invece il limite non esiste diremo che l’integrale improprio non converge
(o che non esiste).
Esempio 6.18 Proviamo a calcolare l’integrale improprio di f (t) = t−α sulla
semiretta [1, +∞). Abbiamo
1−α
Z b
−1
b
1
se α 6= 1 ,
dt
=
1
−
α
α
1 t
log b
se α = 1 ;
quindi
Z
1
Esempio 6.19
esiste. Infatti
+∞
1
dt =
tα
(
1
α−1
+∞
se α > 1 ,
altrimenti.
L’integrale improprio di f (t) = cos t sulla semiretta [0, +∞) non
Z
b
cos t dt = sin b
0
6.6
Integrali impropri
283
che non ha limite per b → +∞.
In maniera analoga se f è definita sulla semiretta (−∞, b] si definisce l’integrale
improprio
Z b
Z b
f (t) dt = lim
f (t) dt ,
a→−∞
−∞
a
ammesso che il limite esista finito; se il limite è infinito (rispettivamente, non
esiste) diremo che l’integrale improprio diverge (rispettivamente, non converge o
non esiste).
Infine, sia f : R → R definita su tutta la retta reale e integrabile su qualsiasi
intervallo limitato. Supponiamo inoltre che per un qualche c ∈ R (e quindi per
R +∞
qualsiasi c ∈ R; perché?) convergano sia l’integrale improprio c f (t) dt sia
Rc
l’integrale improprio −∞ f (t) dt. Allora si definisce l’integrale improprio su tutta
la retta ponendo
Z
Z
+∞
Z
c
f (t) dt =
f (t) dt +
−∞
Siccome
Z c
Z
f (t) dt =
−∞
Z
d
−∞
−∞
f (t) dt+
f (t) dt .
c
Z
c
f (t) dt
+∞
d
Z
+∞
e
f (t) dt =
c
Z
d
f (t) dt+
c
+∞
f (t) dt
d
per ogni c, d ∈ R, la definizione di integrale improprio sulla retta non dipende dalla
scelta di c (cioè otteniamo lo stesso valore quale che sia il punto di partenza c che
scegliamo).
Esempio 6.20 Vogliamo calcolare l’integrale improprio di 1/(1 + t2 ) su tutta la
retta. Abbiamo
Z +∞
Z b
π
1
1
dt
=
lim
dt = lim arctan b = ,
2
2
b→+∞
b→+∞
1
+
t
1
+
t
2
0
0
e
Z
0
−∞
1
dt = lim
a→−∞
1 + t2
quindi
Z
Z
1
π
dt = − lim arctan a = ;
2
a→−∞
1+t
2
a
+∞
−∞
Curiosità 6.9
capitolo) è
0
1
dt = π .
1 + t2
Un integrale improprio particolarmente importante (come vedremo nel prossimo
Z
+∞
2
e−x dx .
0
Voglio descrivere una tecnica Rche ci permette di calcolarlo anche senza bisogno di determinare
b −x2
gli integrali definiti I(b) =
e
dx — integrali che, come detto in precedenza, non si
0
284
Capitolo 6
calcolano con funzioni elementari.
2
2
Cominciamo introducendo la funzione
di due
variabili
F (x, ª
y) = e−x −y . Il grafico
¯
©¡
¢
di F : R2 → R è l’insieme ΓF =
x, y, F (x, y) ¯ (x, y) ∈ R2 ⊂ R3 . Indichiamo con
Q(b) ⊂ R2 il quadrato di lato 2b centrato nell’origine del piano; in altre parole,
Q(b) = {(x, y) ∈ R2 | |x| ≤ b, |y| ≤ b} .
Indichiamo poi con ΓF (b) il sottografico di F sopra Q(b), cioè l’insieme
ΓF (b) = {(x, y, z) | (x, y) ∈ Q(b), 0 ≤ z ≤ F (x, y)}
compreso fra il grafico di F e il quadrato Q(b). Se intersechiamo ΓF (b) con il piano di
equazione x = x0 (cioè il piano costituito dai punti di ascissa x0 ) otteniamo una figura
2
2
congruente al sottografico della funzione e−x0 e−y sopra l’intervallo [−b, b], e che quindi ha
area
Z
b
2
2
2
e−x0 e−y dy = 2e−x0 I(b) ,
A(x0 ) =
−b
2
R0
2
2
e−y dy = I(b).
dove ho usato il fatto che e−(−y) = e−y , per cui
−b
Ora, come l’area del sottografico di una funzione di una variabile è l’integrale delle lunghezze dei segmenti ottenuti intersecando il sottografico con le rette x = x0 , anche il volume
del sottografico di una funzione di due variabili si può calcolare come l’integrale delle aree
delle figure ottenute intersecando il sottografico con i piani x = x0 . Quindi il volume V (b)
di ΓF (b) è dato da
Z
Z
b
b
2
e−x dx = 4I(b)2 .
A(x) dx = 2I(b)
V (b) =
−b
−b
Adesso consideriamo invece un cerchio C(r) di centro l’origine e raggio r > 0, e indichiamo
√
con W (r) il volume del sottografico di F sopra il cerchio C(r). Siccome C(b) ⊂ Q(b) ⊂ C( 2b),
abbiamo
√
W (b) < V (b) < W ( 2b) .
Il vantaggio di W (b) su V (b) è che possiamo calcolare esplicitamente W (b). Infatti possiamo
vedere il sottografico di F sopra C(b) come l’unione, al variare di r ∈ [0, b], dei cilindri di base
2
la circonferenza di centro l’origine e altezza e−r , per cui il volume W (b) è l’integrale delle
aree delle superfici laterali di questi cilindri, cioè
Z
b
2
2
2πre−r dr = π(1 − e−b ) ,
W (b) =
0
√
2
grazie a (6.24). Analogamente troviamo W ( 2b) = π(1 − e−2b ); quindi
2
2
π(1 − e−b ) < 4I(b)2 < π(1 − e−2b ) .
Mandando b → +∞ sia il primo che il terzo termine tendono a π, per cui il termine centrale
è forzato ad avere lo stesso limite; quindi
Z
+∞
2
e−x dx =
0
√
π
.
2
6.6
Integrali impropri
2 /2
−x
Nel prossimo capitolo ci servirà
√ l’integrale improprio di f (x) = e
Usando la sostituzione u = x/ 2 possiamo scrivere
Z
b
−x2 /2
e
dx =
√
Z
Z
2
e−u du =
0
+∞
2 /2
e−x
Siccome
R0
−∞
e
dx =
√
√
√
2 lim I(b/ 2) = 2
b→+∞
0
−x2 /2
su tutta la retta.
√
√
2I(b/ 2) ;
2
2
0
quindi
√
b/
285
dx =
R +∞
0
−x2 /2
e
Z
Z
√
+∞
2
e−u du =
0
2π
.
2
dx, otteniamo infine
+∞
2 /2
e−x
dx =
√
2π .
−∞
L’altro caso di integrale improprio riguarda le funzioni non limitate. Supponiamo che f : (a, b] → R sia una funzione limitata e integrabile su ogni intervallo [x, b] con x > a, ma non necessariamente limitata nell’intero intervallo (a, b].
Rb
Diremo che f è integrabile sull’intervallo (a, b] se esiste finito il limite di x f (t) dt
per x → a+ , e scriveremo
Z
Z
b
a
f (t) dt = lim+
x→a
b
f (t) dt ;
x
Rb
si dice che a f (t) dt è l’integrale improprio di f sull’intervallo (a, b], e che l’integrale
improprio converge. Se il limite esiste ma è infinito diremo che l’integrale improprio
diverge; se invece il limite non esiste diremo che l’integrale improprio non converge
(o che non esiste).
In modo assolutamente analogo si definisce (quando esiste) l’integrale improprio
sull’intervallo [a, b) di una funzione f : [a, b) → R limitata e integrabile su ciascun
intervallo [a, x] per xR< b ma non necessariamente limitata su [a, b); questa volta
x
si calcola il limite di a f (t) dt per x che tende a b da sotto.
Esempio 6.21 Proviamo a calcolare l’integrale improprio di f (t) = t−α sull’intervallo (0, 1]. Abbiamo
Z
1
x
quindi
Z
1 − x1−α
1
dt =
1−α
tα
log x−1
1
0
1
dt =
tα
(
1
1−α
+∞
se α 6= 1 ,
se α = 1 ;
se α < 1 ,
altrimenti.
286
Capitolo 6
Ovviamente è possibile combinare i due tipi di integrali impropri, e calcolare
l’integrale improprio su semirette aperte (a, +∞) o (−∞, b) di funzioni non necessariamente limitate, scegliendo un punto c ∈ (a, +∞) e sommando l’integrale
improprio da a a c con l’integrale improprio da c a +∞; ma ti lascio volentieri il
compito di sistemare i dettagli.
6.7 Media integrale
Voglio concludere questo capitolo con almeno un esempio di uso dell’integrale in
ambito biologico (altri esempi li vedremo nel prossimo capitolo).
Il problema che vogliamo affrontare è: come si calcola la media di una funzione
continua?
Esempio 6.22 Supponi di voler mantenere una coltura batterica a una temperatura media di 18 ◦C durante un esperimento. Non puoi pretendere che la temperatura sia esattamente costante per tutto l’esperimento; ci saranno delle fluttuazioni
(sperabilmente piccole). Il tuo assistente ha tracciato un grafico con la misura
istante per istante della temperatura della coltura batterica; che operazione devi
fare per calcolare qual è stata la temperatura media della coltura durante l’esperimento?
Esempio 6.23 A un paziente in riabilitazione dopo un infarto viene monitorata
in continuazione la pressione del sangue, che varia istante per istante in maniera
abbastanza casuale. Le fluttuazioni sono piccole, inevitabili e poco significative;
molto più importante è il valore medio della pressione del paziente. Come facciamo
a calcolarlo?
Abbiamo a suo tempo studiato come calcolare la media di n dati x1 , . . . , xn : si
sommavano e si divideva per n. Un modo geometrico per riprodurre questa operazione è il seguente: costruiamo un istogramma con n colonne affiancate di larghezza unitaria e altezza rispettivamente x1 , . . . , xn . Allora la somma x1 + · · · + xn
corrisponde all’area delle colonne; e la media x si ottiene dividendo l’area per la
lunghezza n del segmento ottenuto unendo le basi delle colonne.
Forti di questa immagine geometrica, affrontiamo il caso continuo. Vogliamo
calcolare la media di una funzione (integrabile) f : [a, b] → R definita su un intervallo [a, b]. Un primo tentativo può essere discretizzare la funzione: consideriamo n + 1 punti a = x0 < x1 < · · · < xn = b equidistanti (cioè tali che
xj+1 − xj = (b − a)/n per ogni j = 0, . . . , n − 1) e calcoliamo la media dei valori f (x0 ), . . . , f (xn−1 ). Ricordando quanto visto nella Sezione 3.5, possiamo rappresentare la discretizzazione sostituendo al grafico della funzione un istogramma
composto da n colonne, dove la colonna j-esima è alta f (xj ) e ha come base l’intervallo [xj , xj+1 ]; vedi la Fig. 3.15. L’area totale delle colonne di questo istogramma
è
n−1
b−a X
f (xj ) ;
f (x0 )(x1 − x0 ) + · · · + f (xn−1 )(xn − xn−1 ) =
n j=0
6.7
Media integrale
287
quindi la media dei valori si ottiene dividendo l’area dell’istogramma per b − a, la
lunghezza dell’intervallo di base.
A questo punto dovrebbe esserti chiaro dove stiamo andando a parare. Aumentando il numero n di punti la media dei valori si avvicina sempre più a quello
che vorremmo considerare il valore medio della funzione sull’intervallo. La media dei valori è data dall’area dell’istogramma divisa per b − a; e all’aumentare
di n l’istogramma approssima sempre meglio il sottografico di f , la cui area è data
dall’integrale. Quindi è naturale definire media integrale della funzione f sull’intervallo [a, b] il numero
Media(f ) =
1
b−a
Z
b
f (t) dt .
a
In altre parole, Media(f ) è l’altezza di un rettangolo di base l’intervallo [a, b] e area
uguale a quella del sottografico di f .
Esempio 6.24 Vogliamo studiare la velocità media del sangue in un capillare
cilindrico di raggio interno r > 0 e lunghezza l > 0; vedi anche l’Esempio 5.31.
In assenza di turbolenza (ovvero, in termini tecnici, in condizione di flusso laminare), un’altra legge di Poiseuille ci dice che la velocità del sangue in un punto che
dista t ∈ [0, r] dall’asse centrale è data da
v(t) =
P 2
(r − t2 ) ,
4ηl
dove P è la differenza di pressione fra i due estremi del capillare, e η è la viscosità
del sangue. Vogliamo calcolare la velocità media del sangue in due casi:
(a) in una sezione circolare del capillare parallela alla base del cilindro; e
(b) lungo un diametro della sezione circolare.
Iniziamo con il caso (b), che è un’applicazione immediata di quanto abbiamo appena
visto. La velocità del sangue dipende solo dalla distanza dall’asse centrale. L’asse
centrale suddivide il diametro in due raggi, e la distribuzione delle velocità su
un raggio è esattamente identica a quella sull’altro raggio; quindi la media delle
velocità sul diametro sarà uguale alla media calcolata su uno solo dei due raggi.
I punti del raggio sono univocamente individuati dalla distanza t ∈ [0, r] dall’asse
centrale che, guarda caso, è l’unica quantità che ci serve per calcolare la velocità.
Quindi la media nel caso (b) è data dalla media integrale1
· Z r
¸
Z
Z
Z r
1 r
1 r P 2
P
(r − t2 ) dt =
r2
Media(b) (v) =
v(t) dt =
dt −
t2 dt
r 0
r 0 4ηl
4ηlr
0
0
·
¸
3
P
P 2
r
3
=
r −
=
r .
4ηlr
3
6ηl
1
Oppure si poteva descrivere i punti dell’intero diametro permettendo a t di variare
da −r a r, considerando cioè la distanza con segno dall’asse centrale, e calcolare la media
integrale di v(t) sull’intervallo [−r, r]; il risultato è identico.
288
Capitolo 6
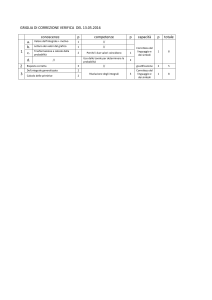
Il calcolo della media nel caso (b) è lievemente più complicato. Invece di fare
l’integrale su un segmento e poi dividere per la lunghezza del segmento, dobbiamo
fare l’integrale su un disco e poi dividere per l’area del disco. Ma cosa vuol dire fare
l’integrale della velocità su un disco? A ogni punto del disco D possiamo associare
la velocità del sangue in quel punto, e costruire il grafico Γ della velocità sul disco,
costituito dai punti (x, y, z) ∈ R3 tali che z sia la velocità del sangue passante per
il punto (x, y) del disco. Allora l’integrale della velocità sul disco sarà il volume
del sottografico; vedi la Fig. 6.6.
1
0.8
0.6
0.4
0.2
0
-1
1
1
0.5
0
-0.5
-0.5
0
0.5
1 -1
Figura 6.6
Grafico della velocità.
Per calcolare questo volume, notiamo che la velocità è costante su ogni circonferenza di raggio t ∈ [0, r] fissato; quindi il pezzo di sottografico sopra una di queste
circonferenze è un cilindro di base la circonferenza di raggio t e altezza v(t). Ora,
come l’area del sottografico di una funzione di una variabile è uguale all’integrale
delle lunghezze dei segmenti che stanno fra un punto dell’intervallo di base e il
grafico, cosı̀ il volume del nostro sottografico è l’integrale delle aree delle superfici
laterali di questi cilindri al variare di t da 0 a r. Siccome l’area della superficie
laterale del cilindro di raggio t è data da 2πtv(t), il volume del sottografico è
· Z
¸
Z r
Z r
Z r
πP 2 r
P
t(r2 − t2 ) dt =
r
2πtv(t) dt = 2π
t dt −
t3 dt
2ηl
0
0 4ηl
0
0
· 4
¸
4
πP r
r
πP 4
=
−
=
r .
2ηl 2
4
8ηl
Quindi la media della velocità sul disco si ottiene dividendo questo volume per
l’area del disco, che è πr2 , e otteniamo
Media(a) (v) =
P 2
3
r = Media(b) (v) .
8ηl
4